
Dynamic Event-Triggered Prescribed Performance Robust Control for Aggressive Quadrotor Flight

Abstract
:1. Introduction
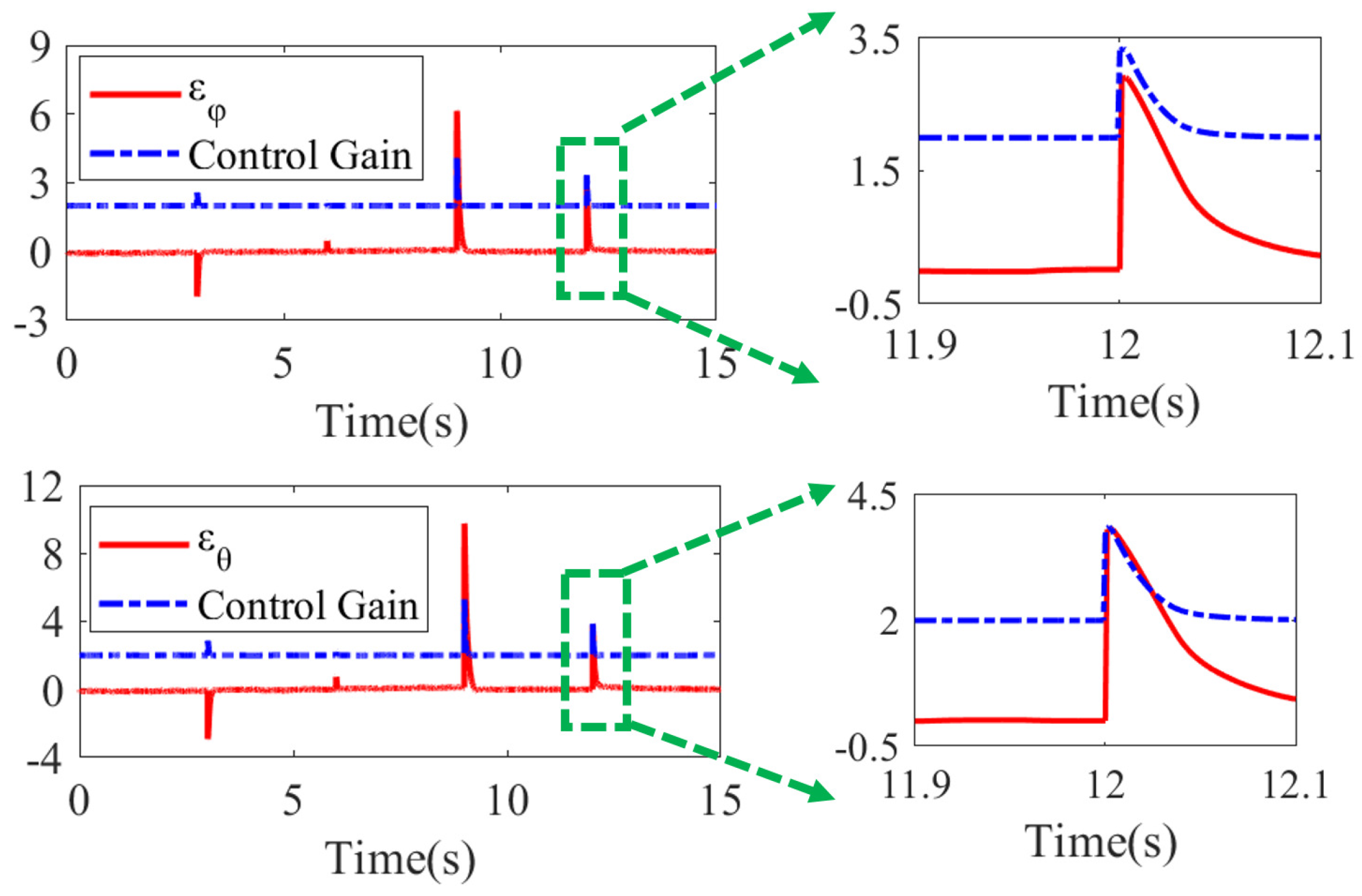
- A dynamic event-triggered performance function boundary adaptive adjustment mechanism is proposed. By assessing the error variation direction and its distance from the performance function boundary, a dynamic compensation factor related to input commands and current errors is established for the performance function, preventing the system divergence caused by errors exceeding the performance function.
- A robust control framework based on DETPPC is established. Based on this, we designed the controller for the quadrotor translational and rotational subsystems by separately constructing unconstrained error dynamics and performance functions incorporating a dynamic event-triggered compensation factor. Furthermore, stability analysis was conducted based on Lyapunov functions.
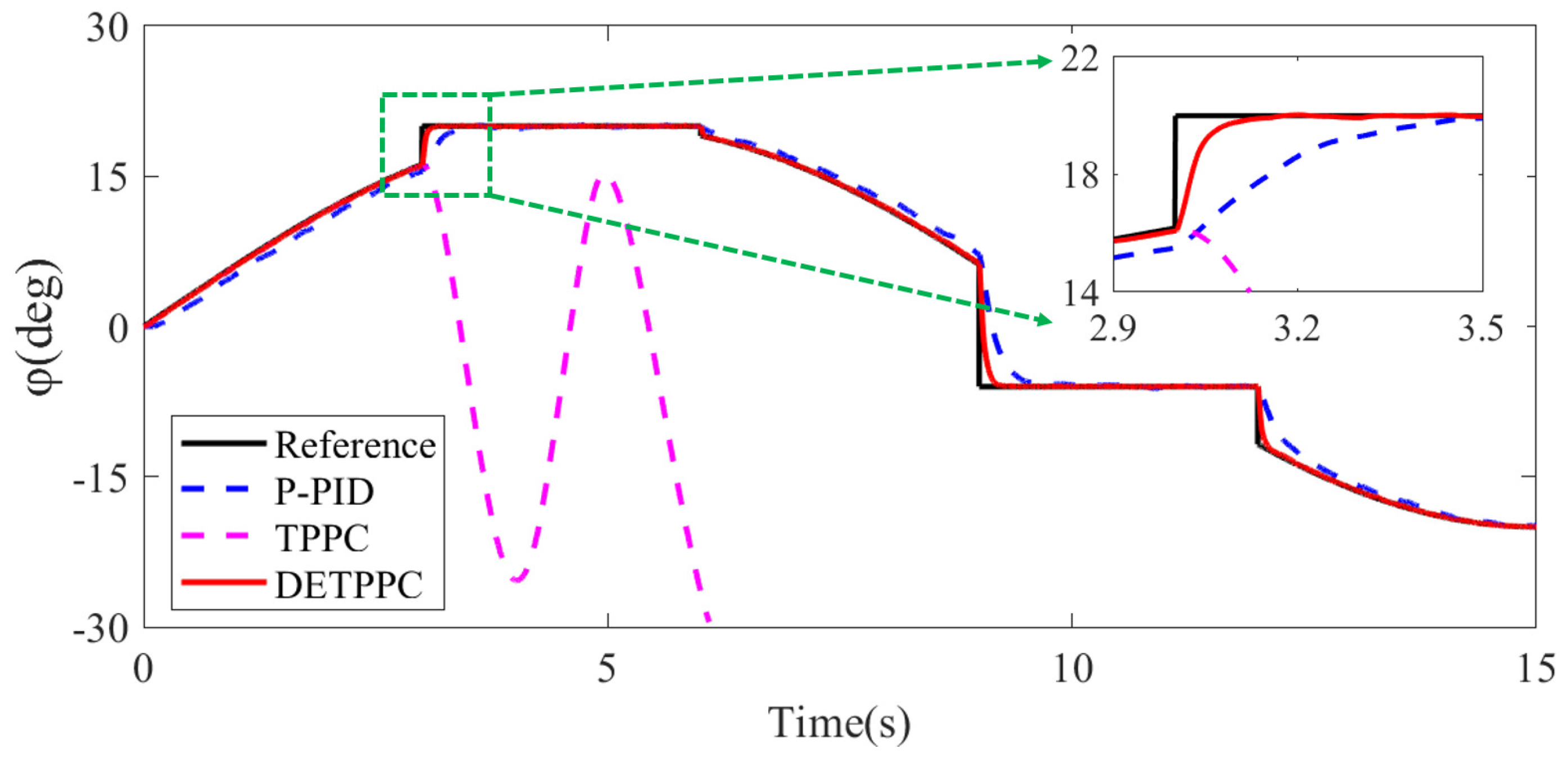
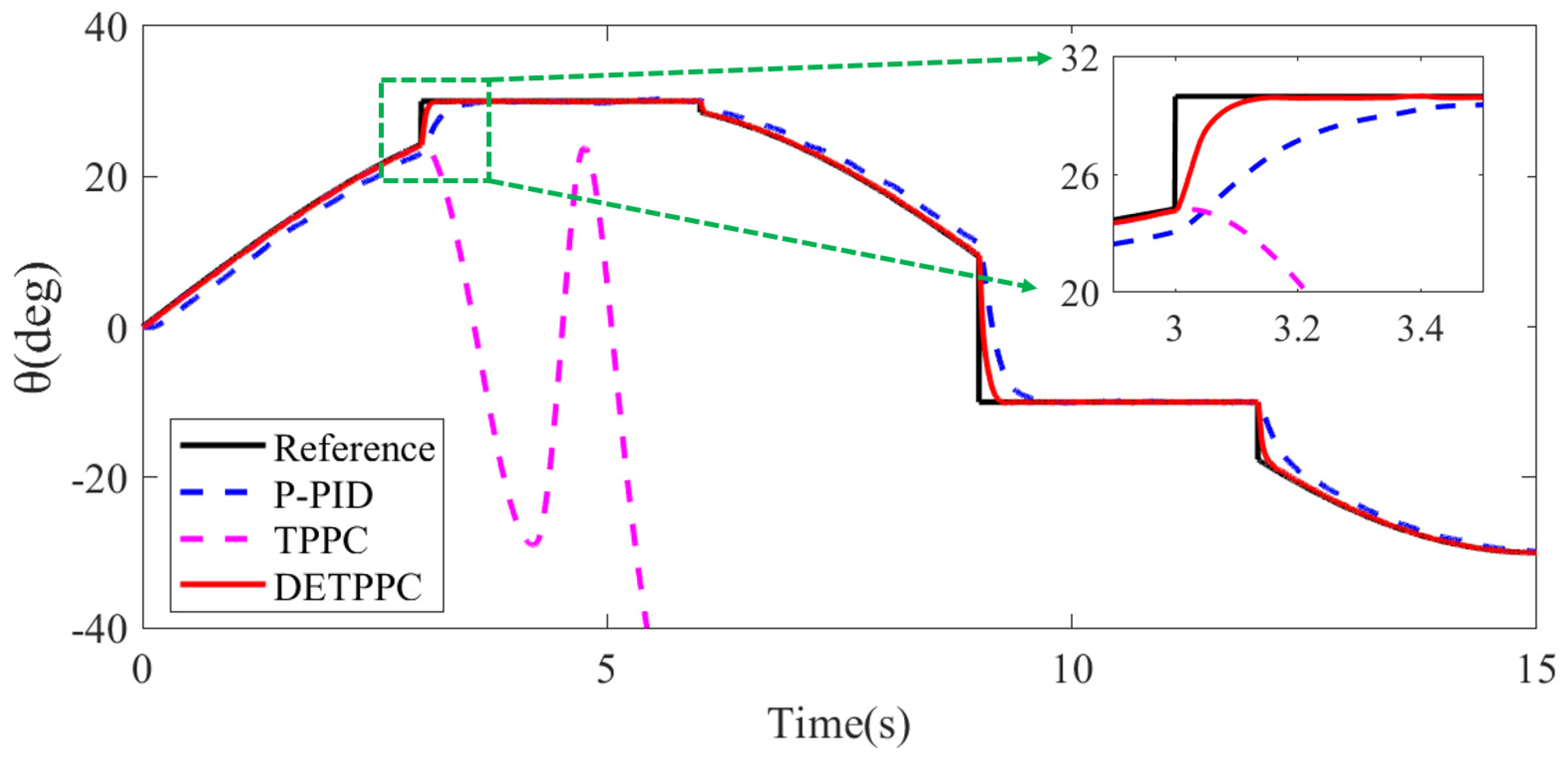
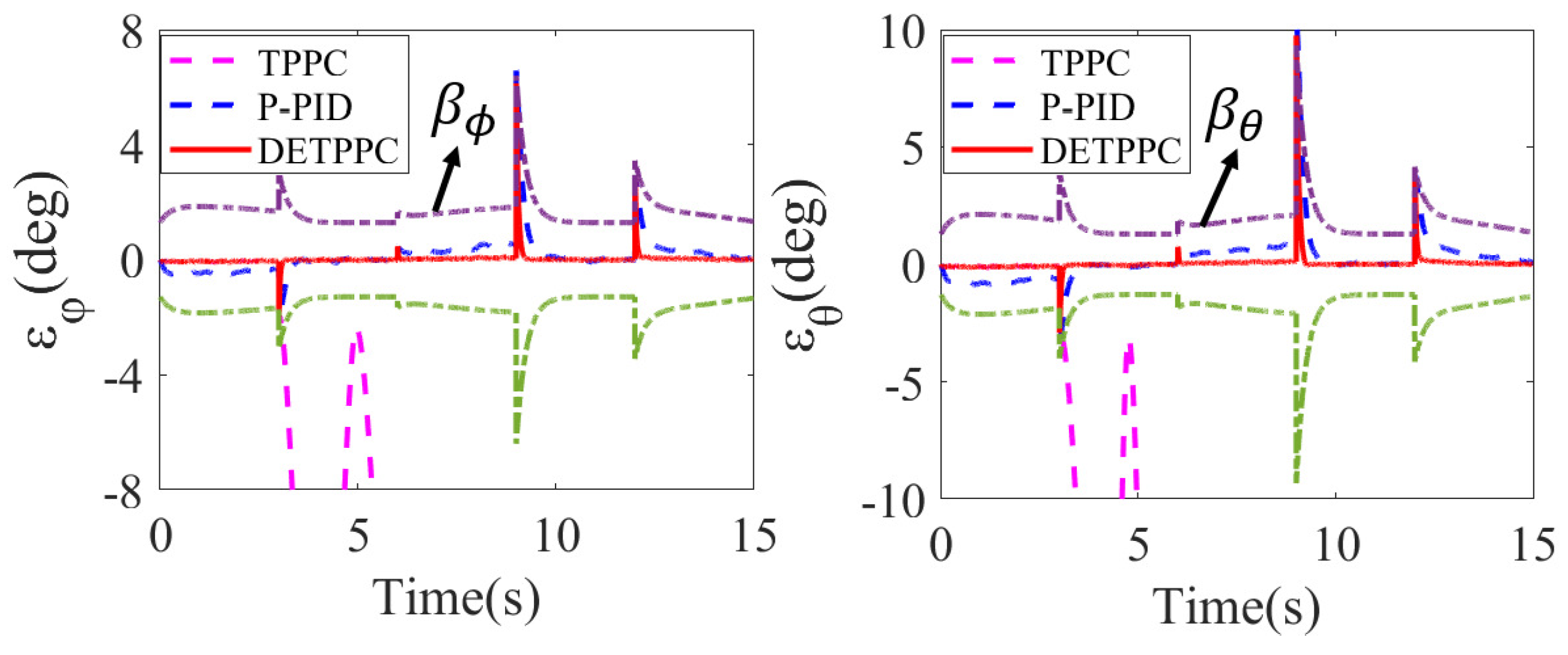
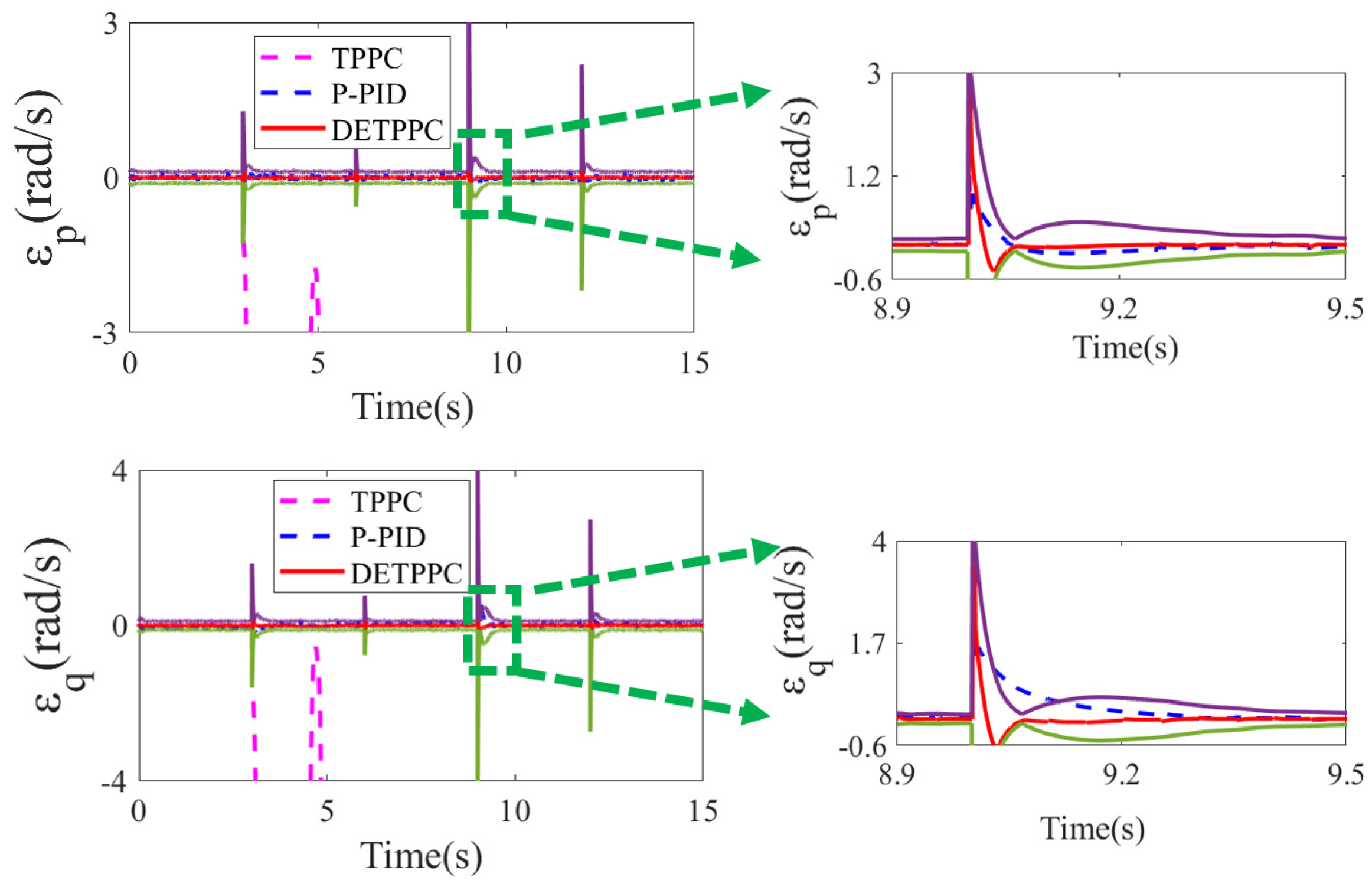
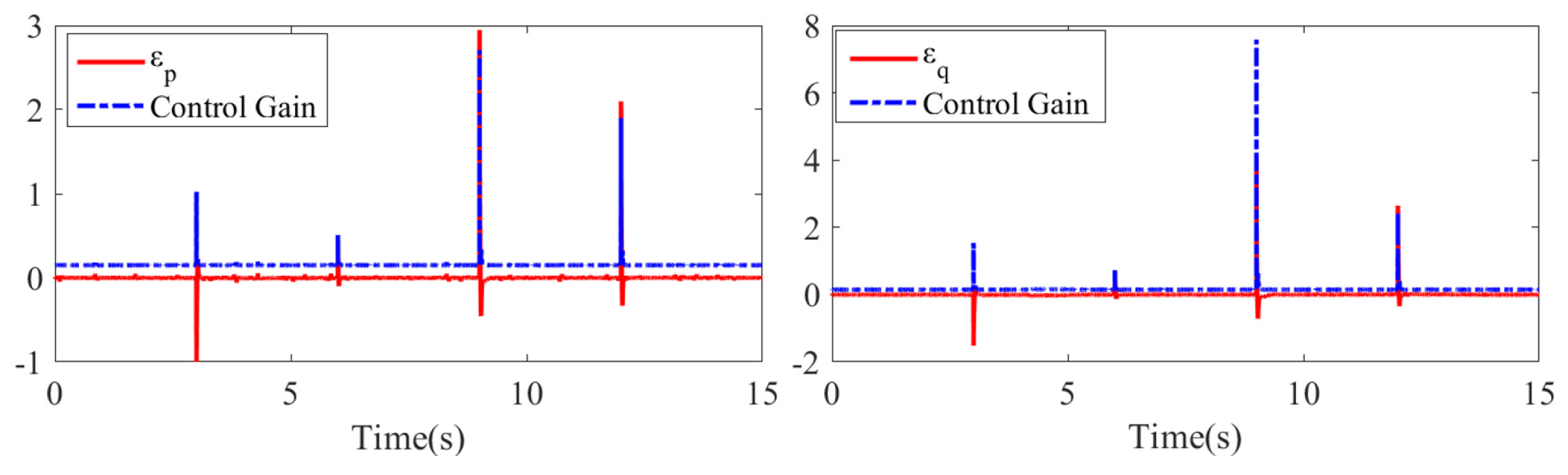
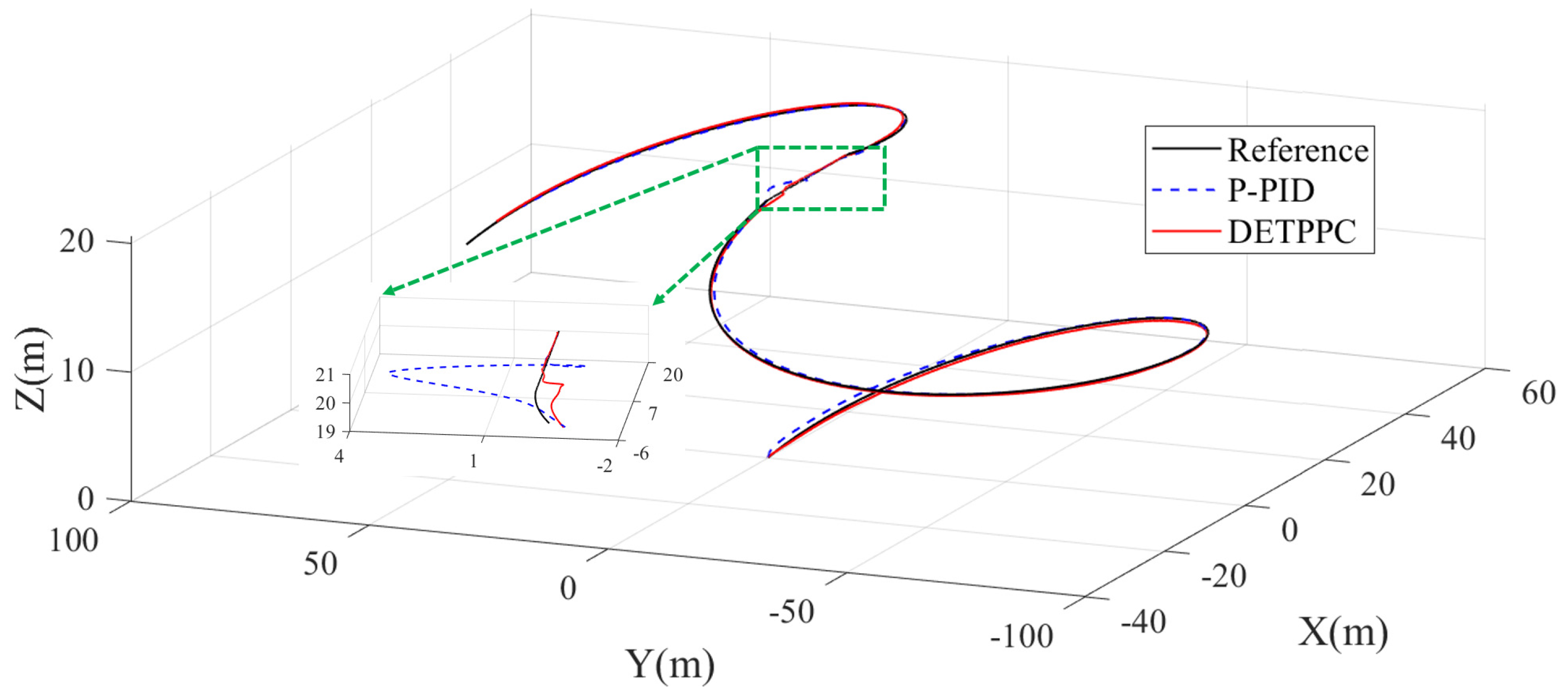
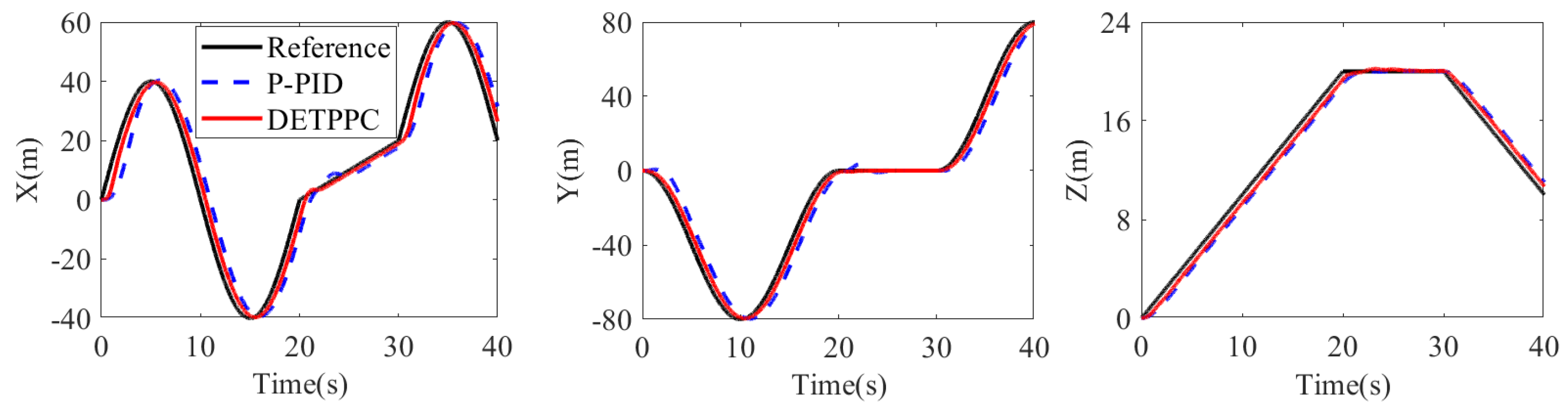
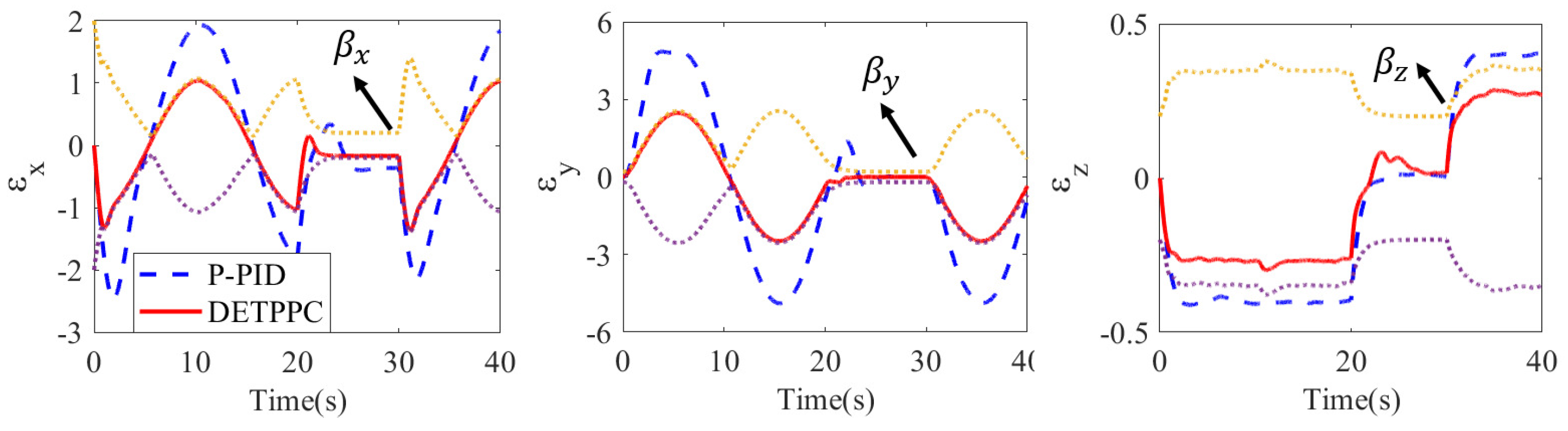
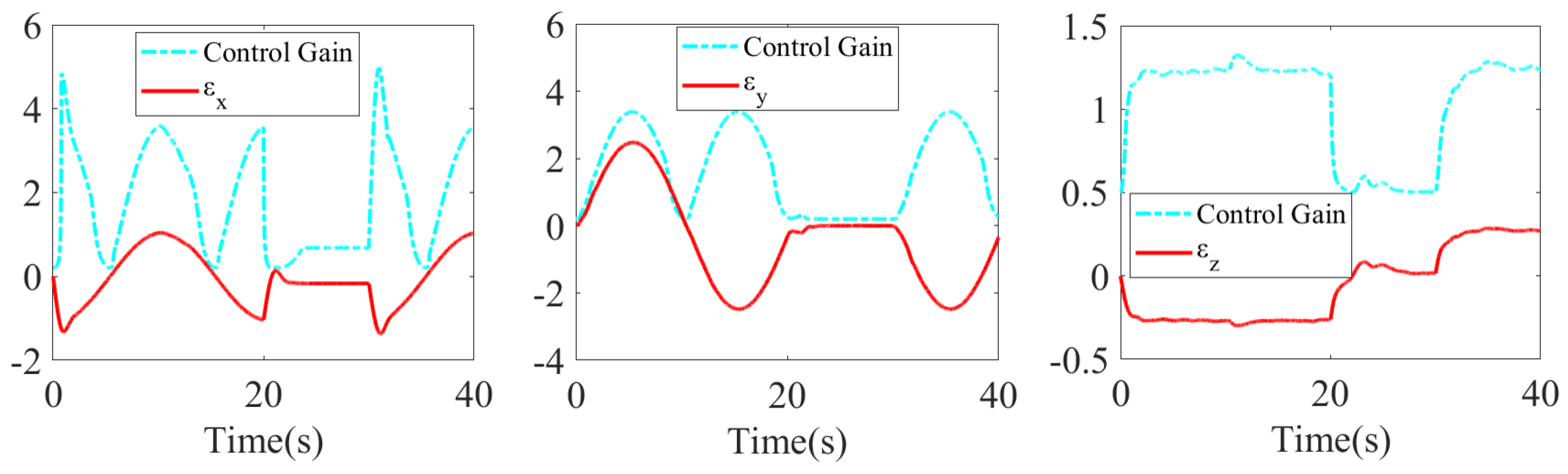
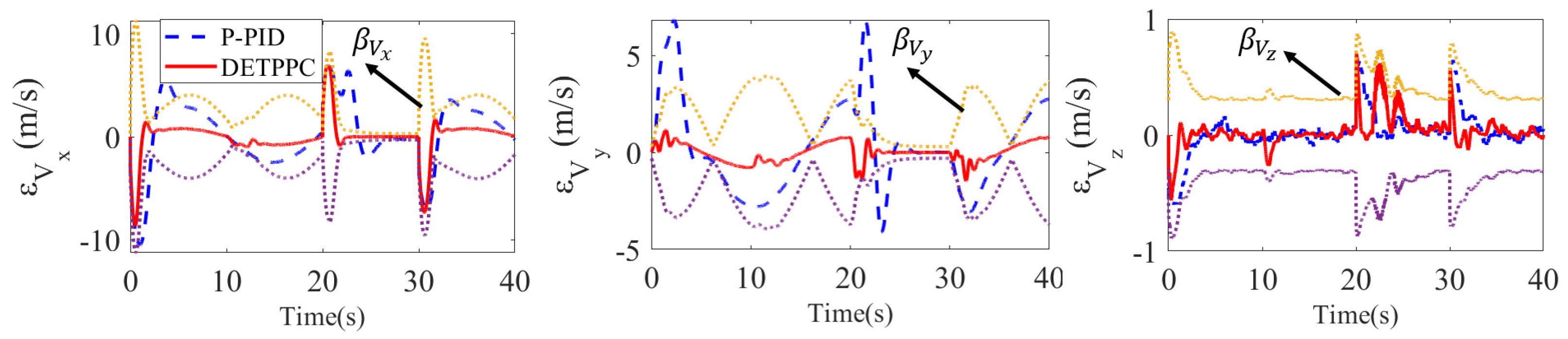
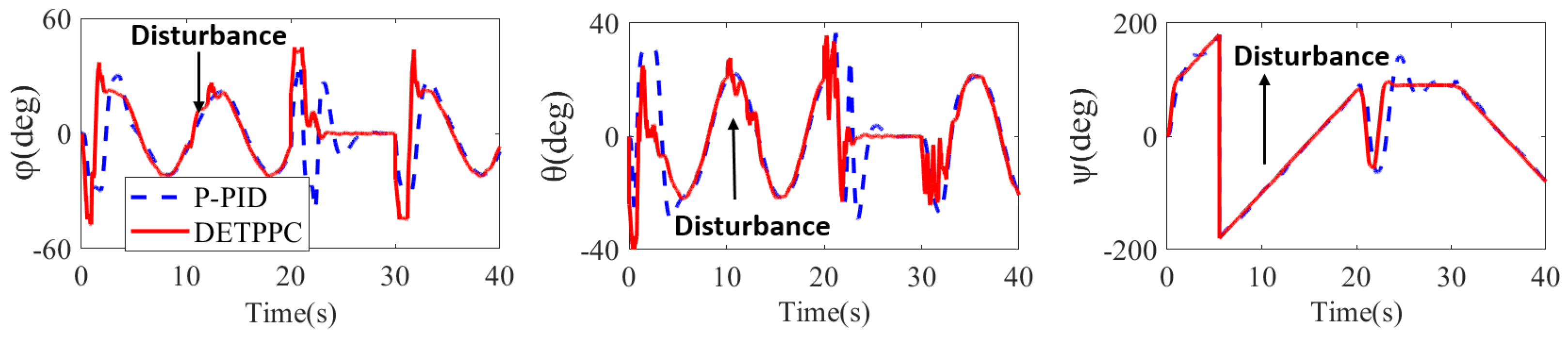
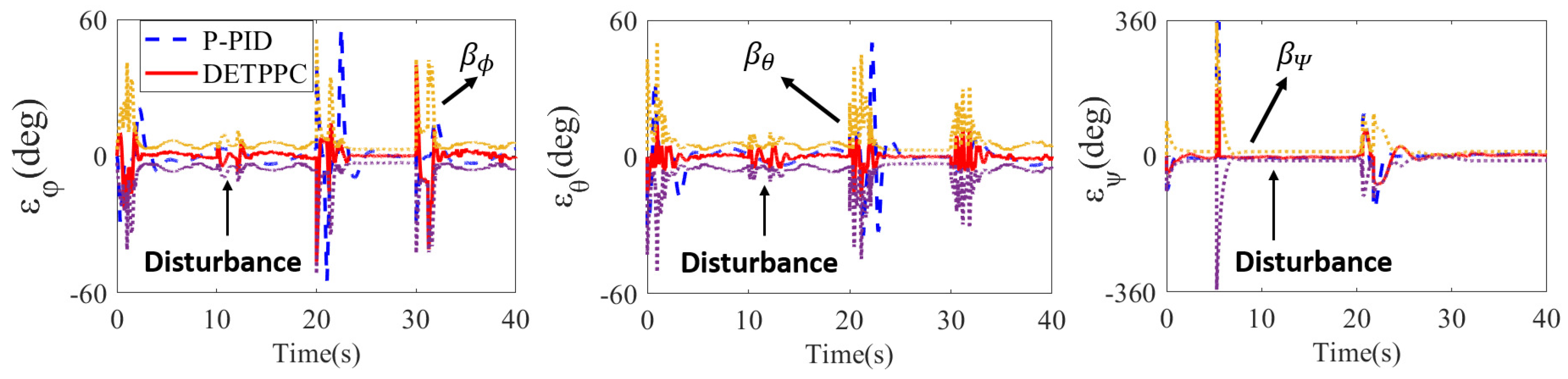
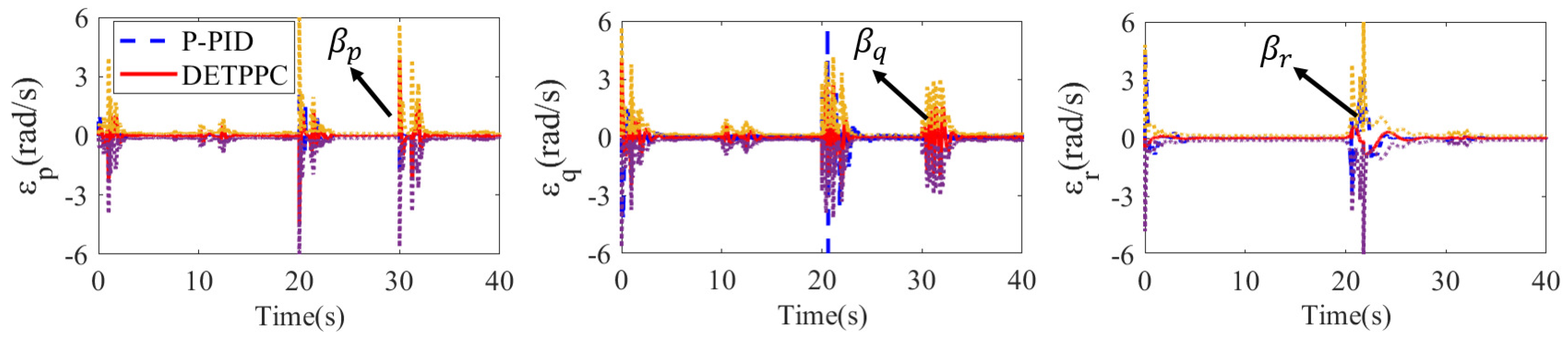
- Attitude control and aggressive trajectory tracking simulations were conducted under command mutations. The results demonstrate that, compared to traditional PPC and cascade PID methods, the proposed DETPPC controller avoids the system divergence caused by errors exceeding the performance function and achieves a faster response and convergence, as well as reduced oscillations.
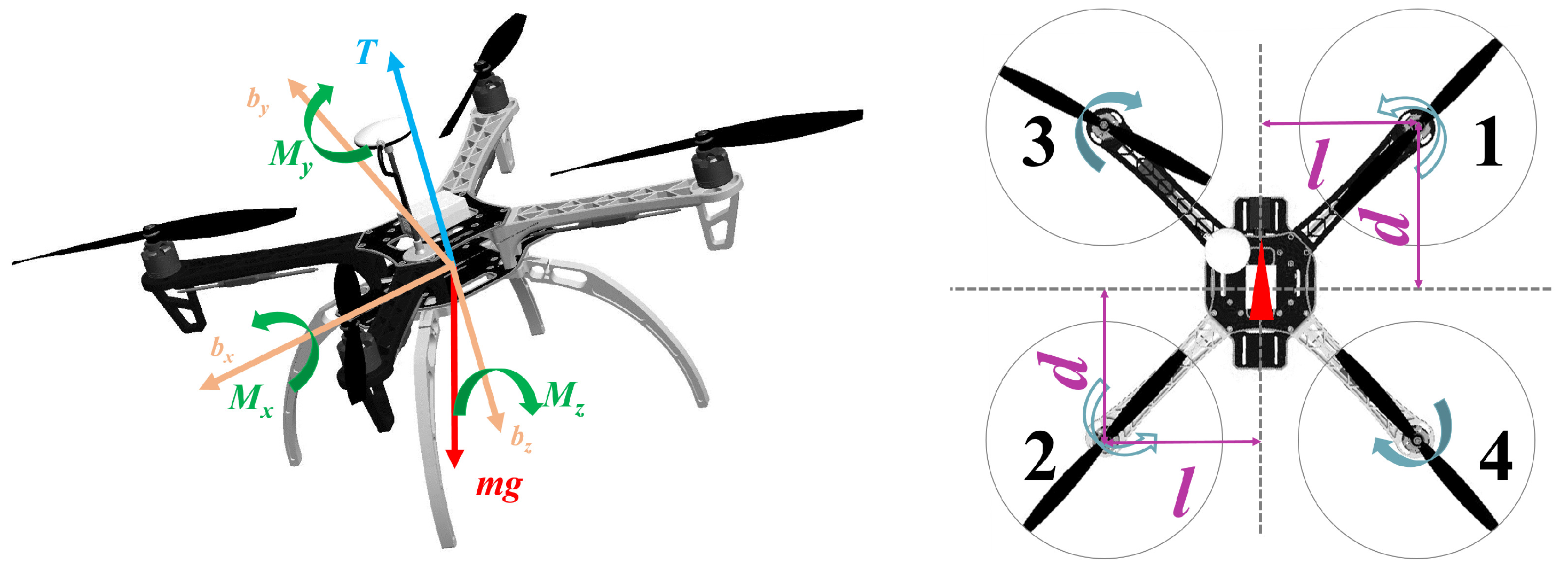
2. Problem Formulation and Preliminaries
3. Dynamic Event-Triggered Prescribed Performance Function
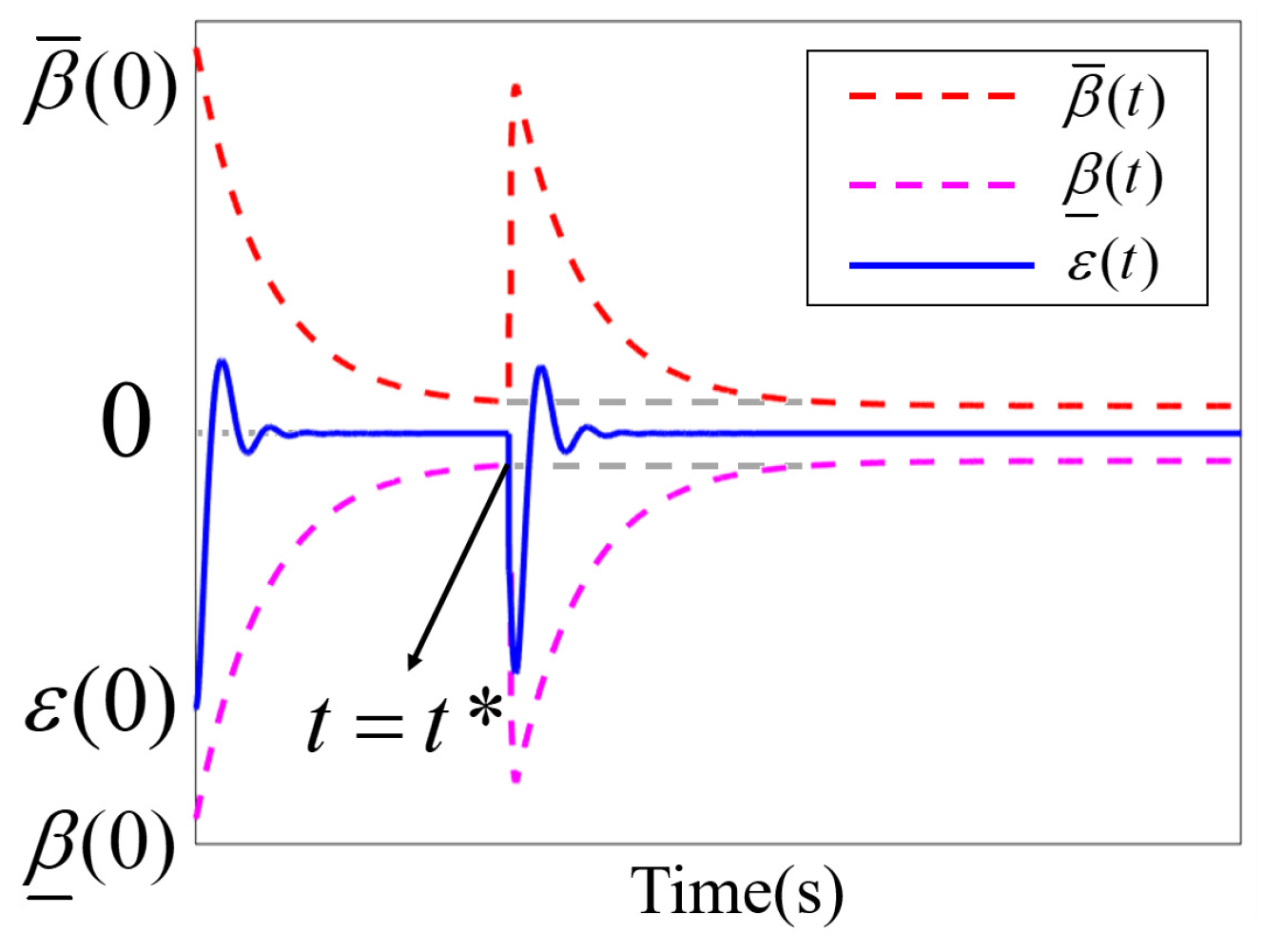
3.1. Prescribed Performance Function Design
3.2. Dynamic Event-Triggered Mechanism
- For for , there are two cases: (a) and (b) . The case (b) contradicts that .
- For , there have two cases: (a) and (b) . Case (b) contradicts .
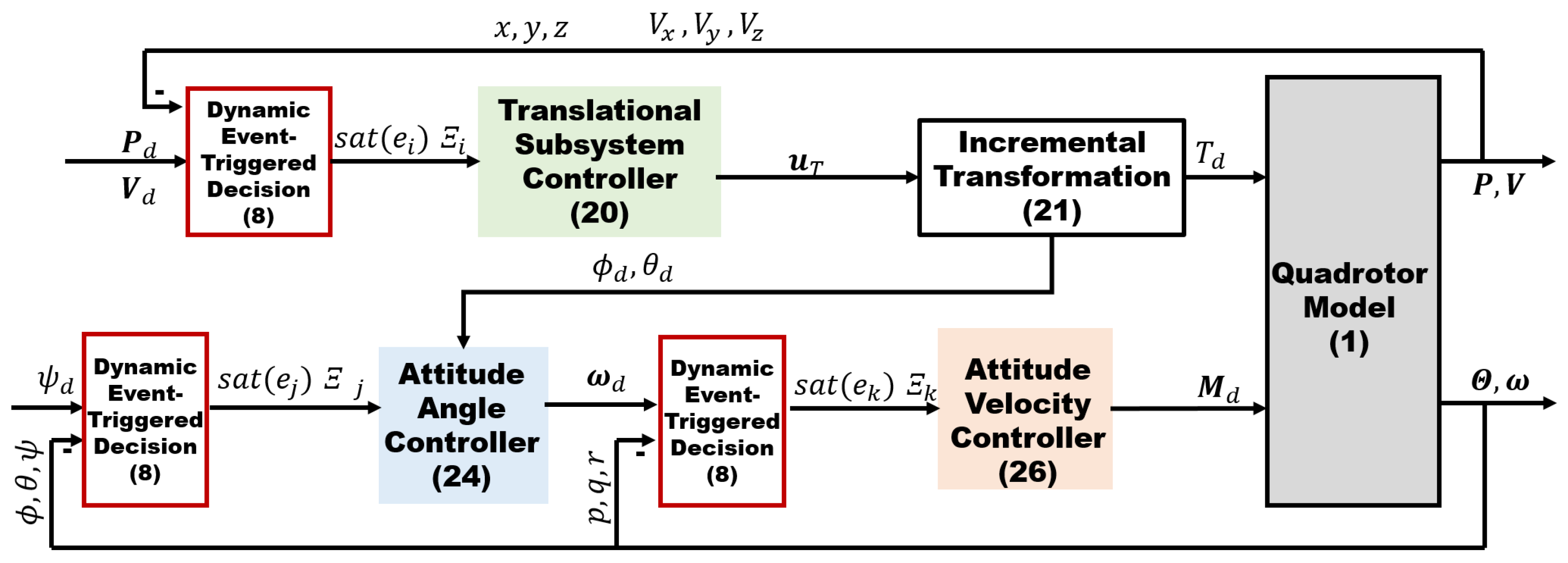
4. Controller Design
4.1. Translational Subsystem Controller Design
4.2. Rotational Subsystem Controller Design
5. Stability Analysis
- For , exists with and .
- All the state variables in (1) for quadcopters are bounded.
- , , , and , are bounded;
- , , and are bounded;
- According to extreme value theory, and for , there is a constant that satisfies for .
- and , are bounded;
- and are bounded by the former step;
- and are bounded for .
- and , are bounded;
- and are bounded by the former step;
- Based on the extreme value theory, and are bounded for and there exists a constant that satisfies
6. Simulation and Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fan, B.; Li, Y.; Zhang, R.; Fu, Q. Review on the technological development and application of UAV systems. Chin. J. Electron. 2020, 29, 199–207. [Google Scholar] [CrossRef]
- Zhen, Z.; Jiang, J.; Sun, S.; Wang, B. Cooperative Control and Decision of UAV Swarm Operations; National Defense Industry Press: Beijing, China, 2022. [Google Scholar]
- Liu, Z.; Wang, X.; Shen, L.; Zhao, S.; Cong, Y.; Li, J.; Yin, D.; Jia, S.; Xiang, X. Mission-oriented miniature fixed-wing UAV swarms: A multilayered and distributed architecture. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1588–1602. [Google Scholar] [CrossRef]
- Bry, A.; Richter, C.; Bachrach, A.; Roy, N. Aggressive flight of fixed-wing and quadrotor aircraft in dense indoor environments. Int. J. Robot. Res. 2015, 34, 969–1002. [Google Scholar] [CrossRef]
- Jia, J.; Guo, K.; Yu, X.; Guo, L.; Xie, L. Agile flight control under multiple disturbances for quadrotor: Algorithms and evaluation. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3049–3062. [Google Scholar] [CrossRef]
- Belmouhoub, A.; Medjmadj, S.; Bouzid, Y.; Derrouaoui, S.; Guiatni, M. Enhanced backstepping control for an unconventional quadrotor under external disturbances. Aeronaut. J. 2023, 127, 627–650. [Google Scholar] [CrossRef]
- Labbadi, M.; Boudaraia, K.; Elakkary, A.; Djemai, M.; Cherkaoui, M. A continuous nonlinear sliding mode control with fractional operators for quadrotor UAV systems in the presence of disturbances. J. Aerosp. Eng. 2022, 35, 04021122. [Google Scholar] [CrossRef]
- Wang, J.; Alattas, K.A.; Bouteraa, Y.; Mofid, O.; Mobayen, S. Adaptive finite-time backstepping control tracker for quadrotor UAV with model uncertainty and external disturbance. Aerosp. Sci. Technol. 2023, 133, 108088. [Google Scholar] [CrossRef]
- Jabeur, C.B.; Seddik, H. Optimized neural networks-PID controller with wind rejection strategy for a Quad-Rotor. J. Robot. Control JRC 2022, 3, 62–72. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, B.; Zheng, Z. Robust Adaptive Control for a Quadrotor UAV with Uncertain Aerodynamic Parameters. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 8313–8326. [Google Scholar] [CrossRef]
- Shao, X.; Xu, L.; Zhang, W. Quantized control capable of appointed-time performances for quadrotor attitude tracking: Experimental validation. IEEE Trans. Ind. Electron. 2021, 69, 5100–5110. [Google Scholar] [CrossRef]
- Cui, G.; Yang, W.; Yu, J.; Li, Z.; Tao, C. Fixed-time prescribed performance adaptive trajectory tracking control for a QUAV. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 494–498. [Google Scholar] [CrossRef]
- Jia, F.; Wang, X.; Zhou, X. Robust adaptive prescribed performance control for a class of nonlinear pure-feedback systems. Int. J. Robust Nonlinear Control 2019, 29, 3971–3987. [Google Scholar] [CrossRef]
- Verginis, C.K.; Bechlioulis, C.P.; Dimarogonas, D.V.; Kyriakopoulos, K.J. Robust distributed control protocols for large vehicular platoons with prescribed transient and steady-state performance. IEEE Trans. Control Syst. Technol. 2017, 26, 299–304. [Google Scholar] [CrossRef]
- Bu, X.; Wu, X.; Zhu, F.; Huang, J.; Ma, Z.; Zhang, R. Novel prescribed performance neural control of a flexible air-breathing hypersonic vehicle with unknown initial errors. ISA Trans. 2015, 59, 149–159. [Google Scholar] [CrossRef] [PubMed]
- Bu, X.; Xiao, Y. Prescribed performance-based low-computational cost fuzzy control of a hypersonic vehicle using non-affine models. Adv. Mech. Eng. 2018, 10, 1687814018757261. [Google Scholar] [CrossRef]
- Xu, J.; Wang, L.; Liu, Y.; Xue, H. Finite-time prescribed performance optimal attitude control for quadrotor UAV. Appl. Math. Model. 2023, 120, 752–768. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, J. Robust control for a quadrotor aircraft with small overshoot and high-precision position tracking performance. J. Frankl. Inst. 2020, 357, 13386–13409. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, J. Improved prescribed performance control for air-breathing hypersonic vehicles with unknown deadzone input nonlinearity. ISA Trans. 2018, 79, 95–107. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, J.; Li, J.; Liu, B. Improved prescribed performance control for nonaffine pure-feedback systems with input saturation. Int. J. Robust Nonlinear Control 2019, 29, 1769–1788. [Google Scholar] [CrossRef]
- Padfield, G.D. Helicopter Flight Dynamics: Including a Treatment of Tiltrotor Aircraft; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Bechlioulis, C.P.; Rovithakis, G.A. A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems. Automatica 2014, 50, 1217–1226. [Google Scholar] [CrossRef]
- Bu, X. Prescribed performance control approaches, applications and challenges: A comprehensive survey. Asian J. Control 2023, 25, 241–261. [Google Scholar] [CrossRef]
- Pfeifle, O.; Fichter, W. Cascaded incremental nonlinear dynamic inversion for three-dimensional spline-tracking with wind compensation. J. Guid. Control Dyn. 2021, 44, 1559–1571. [Google Scholar] [CrossRef]
- Sastry, S. Nonlinear Systems: Analysis, Stability, and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 10. [Google Scholar]
- Wang, L. PID Control System Design and Automatic Tuning Using MATLAB/Simulink; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| m | 6.95 kg |
| l | 0.65 m |
| d | 0.66 m |
| g | 9.81 |
| Index | DETPPC | P-PID |
|---|---|---|
| RMS (m) | 1.2715 | 4.1206 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Ye, J.; Song, T. Dynamic Event-Triggered Prescribed Performance Robust Control for Aggressive Quadrotor Flight. Aerospace 2024, 11, 301. https://doi.org/10.3390/aerospace11040301
Wu Z, Ye J, Song T. Dynamic Event-Triggered Prescribed Performance Robust Control for Aggressive Quadrotor Flight. Aerospace. 2024; 11(4):301. https://doi.org/10.3390/aerospace11040301
Chicago/Turabian StyleWu, Zeliang, Jianchuan Ye, and Tao Song. 2024. "Dynamic Event-Triggered Prescribed Performance Robust Control for Aggressive Quadrotor Flight" Aerospace 11, no. 4: 301. https://doi.org/10.3390/aerospace11040301
APA StyleWu, Z., Ye, J., & Song, T. (2024). Dynamic Event-Triggered Prescribed Performance Robust Control for Aggressive Quadrotor Flight. Aerospace, 11(4), 301. https://doi.org/10.3390/aerospace11040301