
Data-Driven 4D Trajectory Prediction Model Using Attention-TCN-GRU


Abstract
:1. Introduction
2. Data Analysis and Processing
- Arrival Phase: The arrival phase marks the transition of the aircraft from enroute to the terminal area boundary, culminating at the initial approach fix (IAF), where the aircraft changes its mode of air travel. Aircraft at different altitudes can intersect with the same arrival route, with each aircraft utilising different flight levels. This phase requires adherence to both vertical and horizontal separation standards, with the majority of sequencing completed during this stage.
- Approach Phase: This phase encompasses the initial, intermediate, and final approach. Aircraft descend from the IAF, reducing altitude and speed according to prescribed approach procedures. Adjustments to horizontal separation are made based on intersecting flight paths to avoid conflicts, aiming first for the intermediate fix (IF) point, then maintaining altitude and speed without deviating from the course to reach the final approach fix (FAF) point, and finally landing on the runway.
- Landing and Go-Around Phase: Aircraft that do not meet landing criteria or fail to land successfully undergo a go-around procedure. The aircraft will either fly back to the IAF for another approach, circle in a designated holding area, or climb to a minimum safe altitude for another landing attempt.
- For departing aircraft, the take-off and departure phases are considered.
- Take-off Phase: This phase marks the commencement of the flight. The aircraft accelerates on the runway until it reaches sufficient speed to generate the necessary lift for take-off. The take-off process involves complex control and system checks to ensure safe departure.
- Departure Phase: Once airborne, the aircraft enters the departure phase, following predetermined flight paths to leave the vicinity of the airport. This stage may involve changes in direction, altitude, and speed to smoothly integrate the aircraft into higher airspace traffic flows. Air traffic control (ATC) plays a crucial role during this phase, guiding the aircraft to avoid conflicts with other flights and ensuring it follows the planned route.
2.1. Data Collection
2.2. Data Preprocessing
3. Methodology
3.1. 4D Trajectory Prediction Process
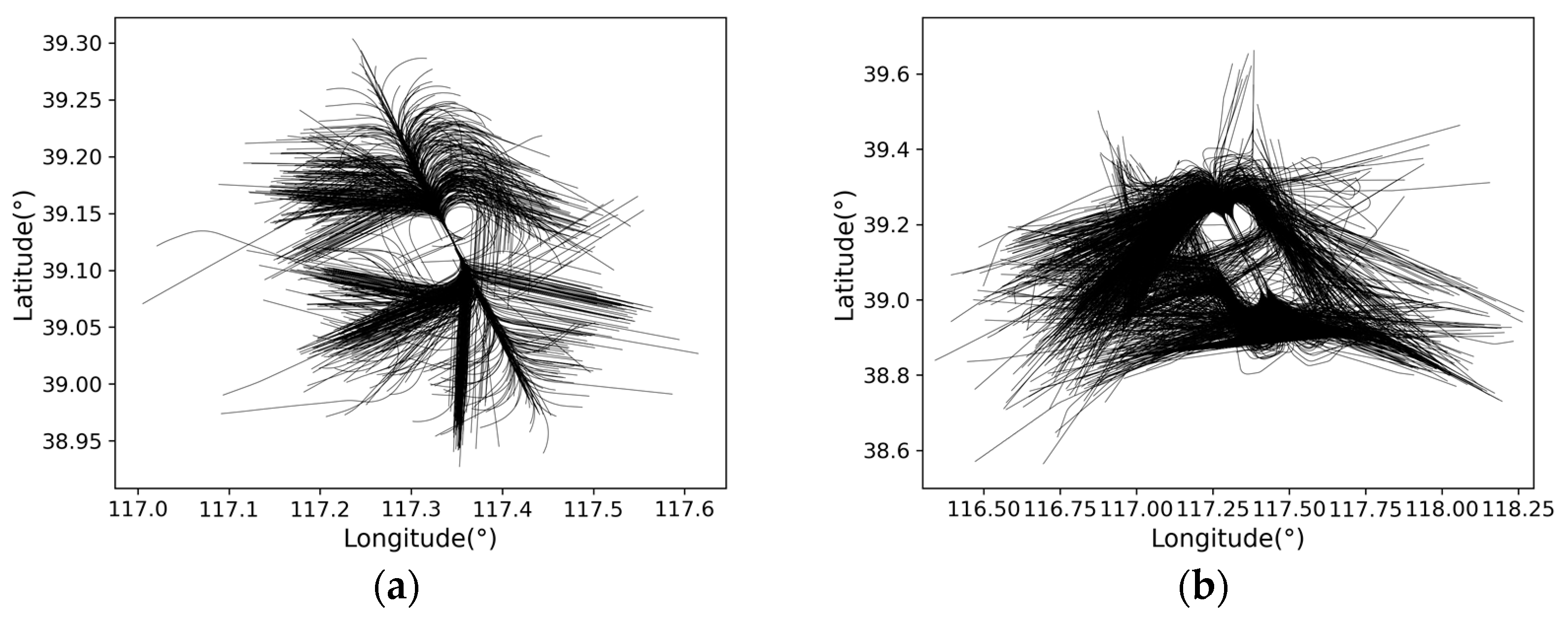
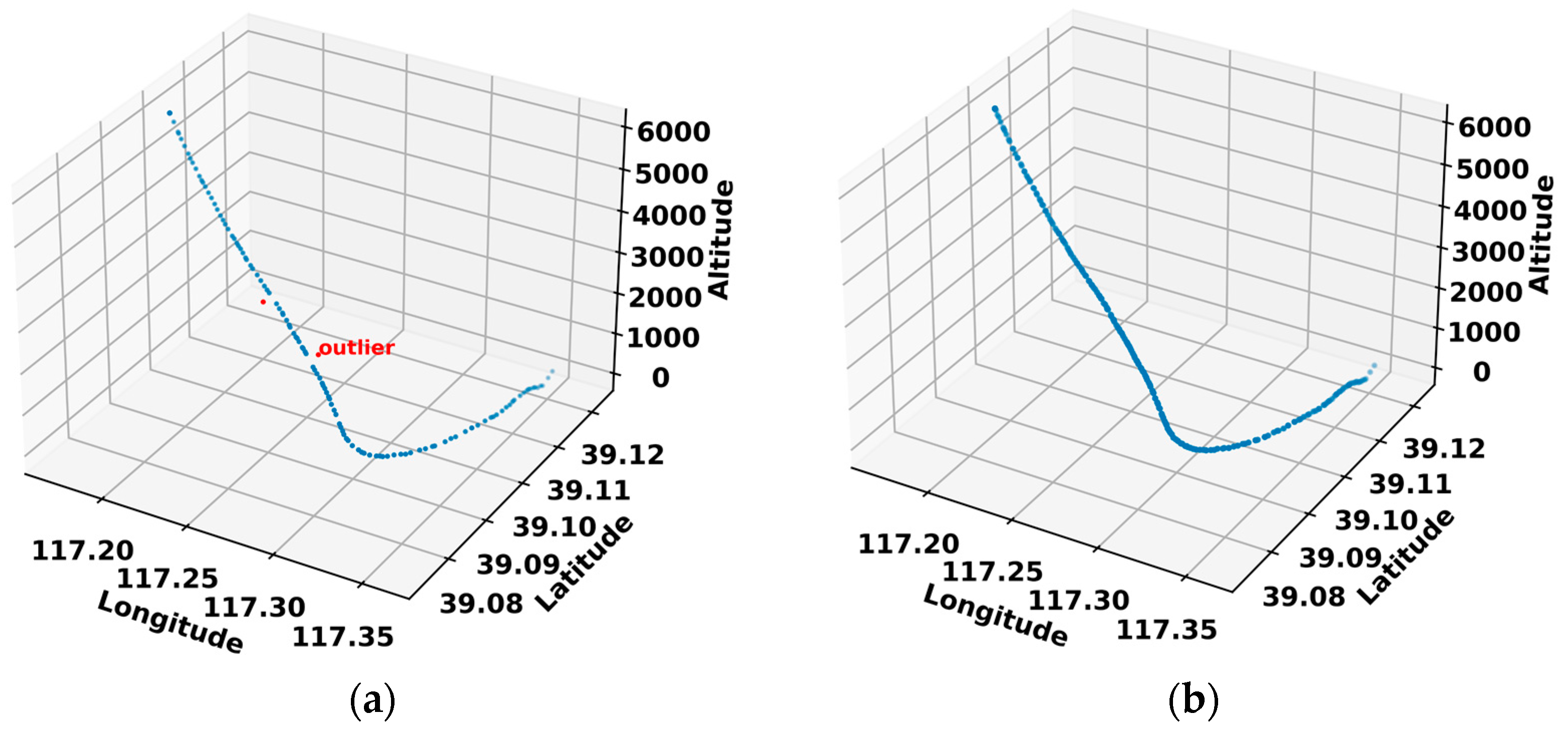
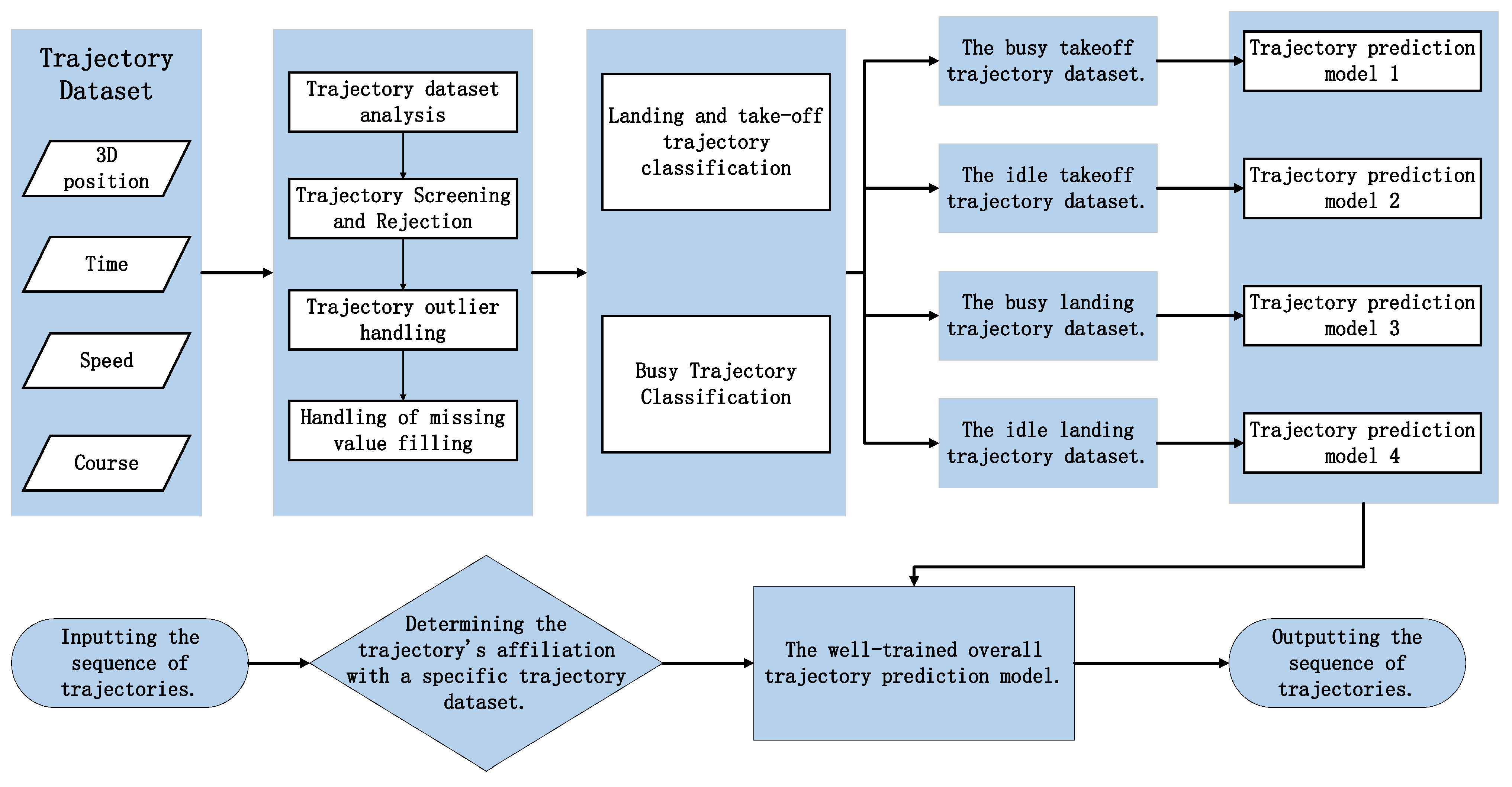
- Trajectory processing and categorization phase. Firstly, we renumber each trajectory under a specific flight number to ensure that each flight number corresponds to only one trajectory. Then, we filter trajectories based on a range within 20 km of the airport’s central point and below an altitude of 6000 feet. This filtering step aims to remove cruising and abnormal trajectories. Subsequently, we apply a Spatiotemporal Filling (Spat Fill) process to each trajectory to eliminate outliers and fill missing values, resulting in a high-quality trajectory dataset with consistent time intervals.
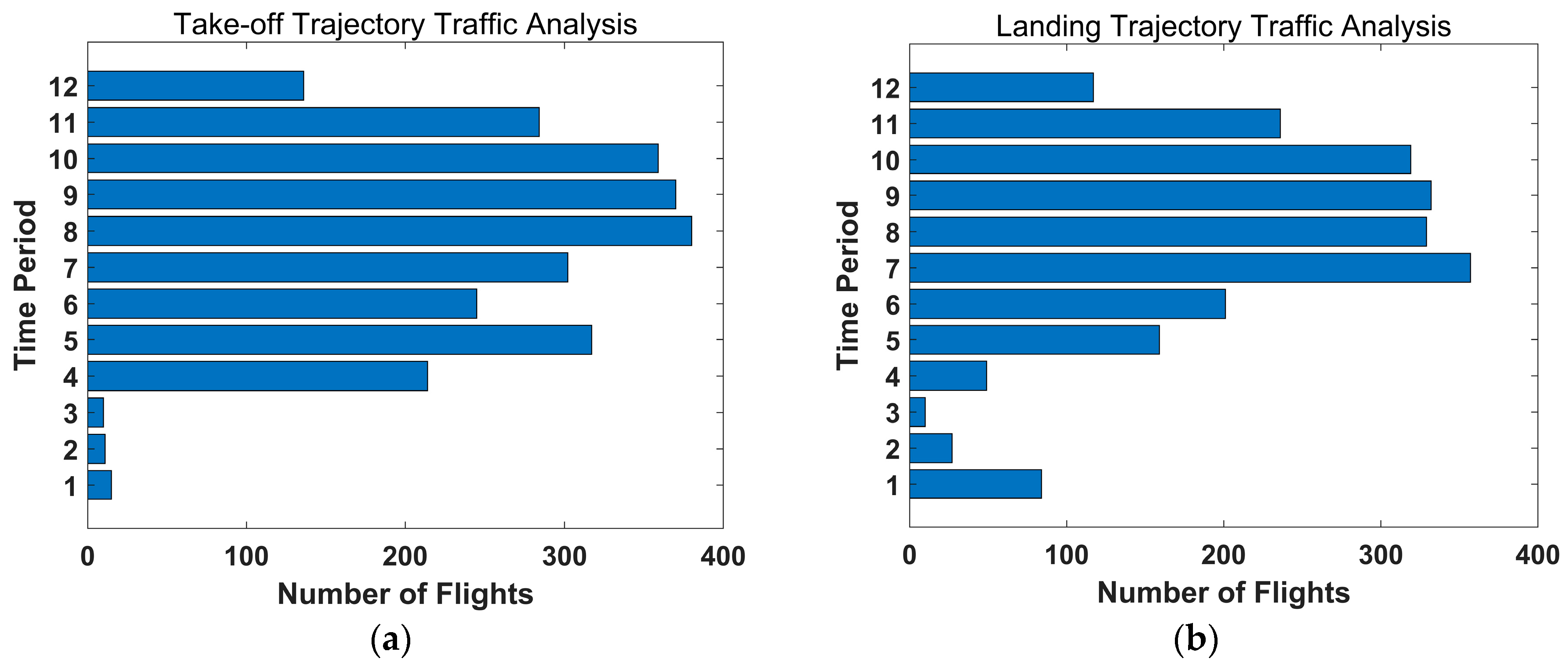
- Data set grouping training phase. We categorise the preprocessed high-quality trajectory dataset based on traffic density and different take-off and landing procedures. Therefore, we divide the trajectory dataset into take-off and landing groups and subject each group to traffic density analysis, resulting in datasets for busy and idle time periods. We divide each trajectory sequence into input and output sequences based on time. Due to variations in the duration of take-off and landing procedures, the lengths of input and output sequences for take-off and landing trajectories differ. Consequently, we train separate 4D trajectory prediction models for take-off and landing trajectories by inputting the trajectory sequences of each group into the designed Attention-TCN-GRU model.
- 4D trajectory prediction phase. For the required take-off or landing flights, we judge the busyness of the terminal airspace based on flight schedules. Subsequently, we input the trajectory sequences into the respective trained 4D trajectory prediction models to perform 4D trajectory predictions.
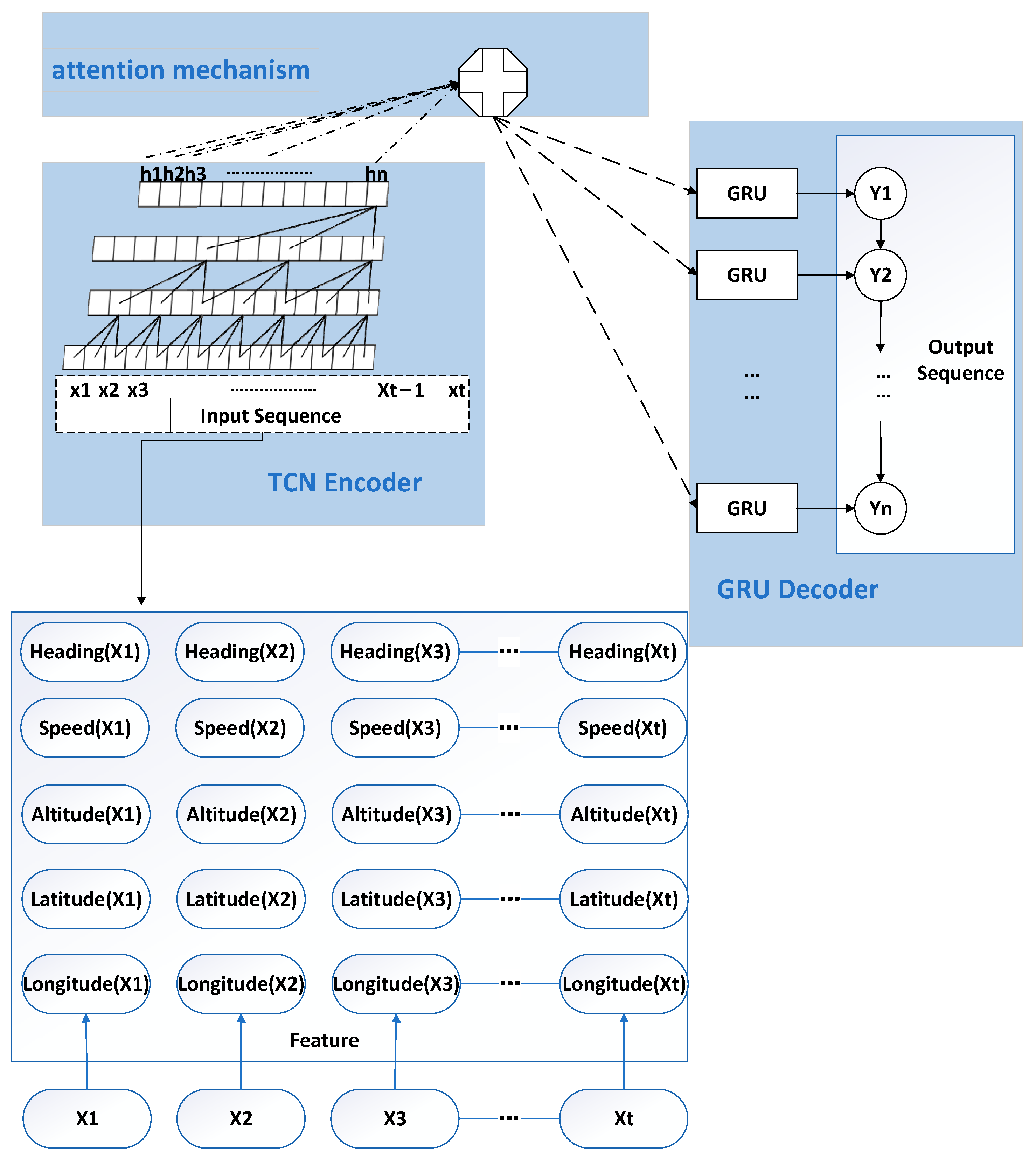
3.2. Attention-TCN-GRU Modeling
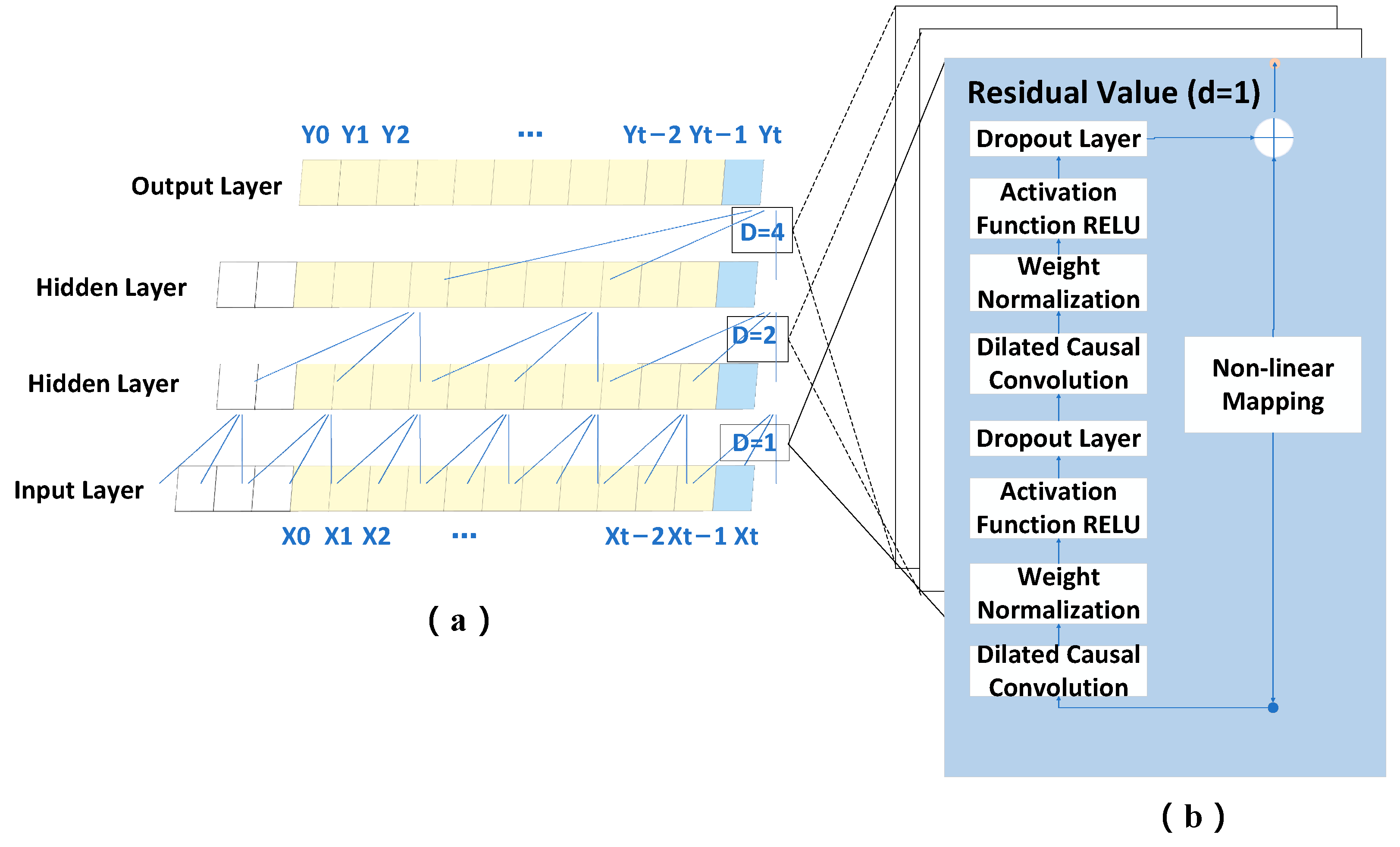
3.2.1. Trajectory Prediction Encoder TCN
3.2.2. Attention Layer
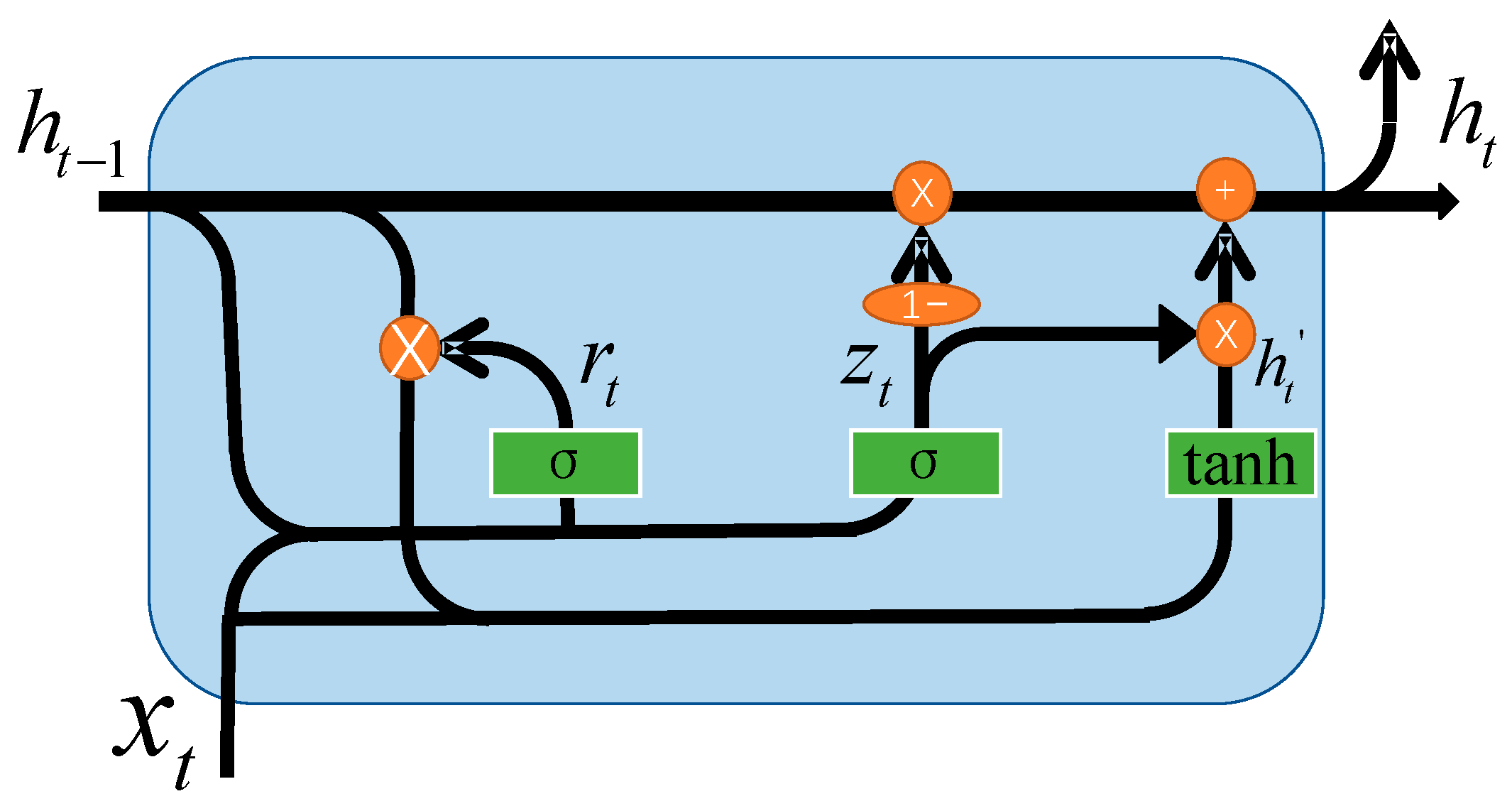
3.2.3. Trajectory Prediction Decoder GRU
3.2.4. Model Training
4. Experimentation
4.1. Experimental Setup
4.2. Test Indicators
4.3. Forecast Results and Comparative Analysis
4.3.1. Assessment of Forecasting Results for Busyness Classification
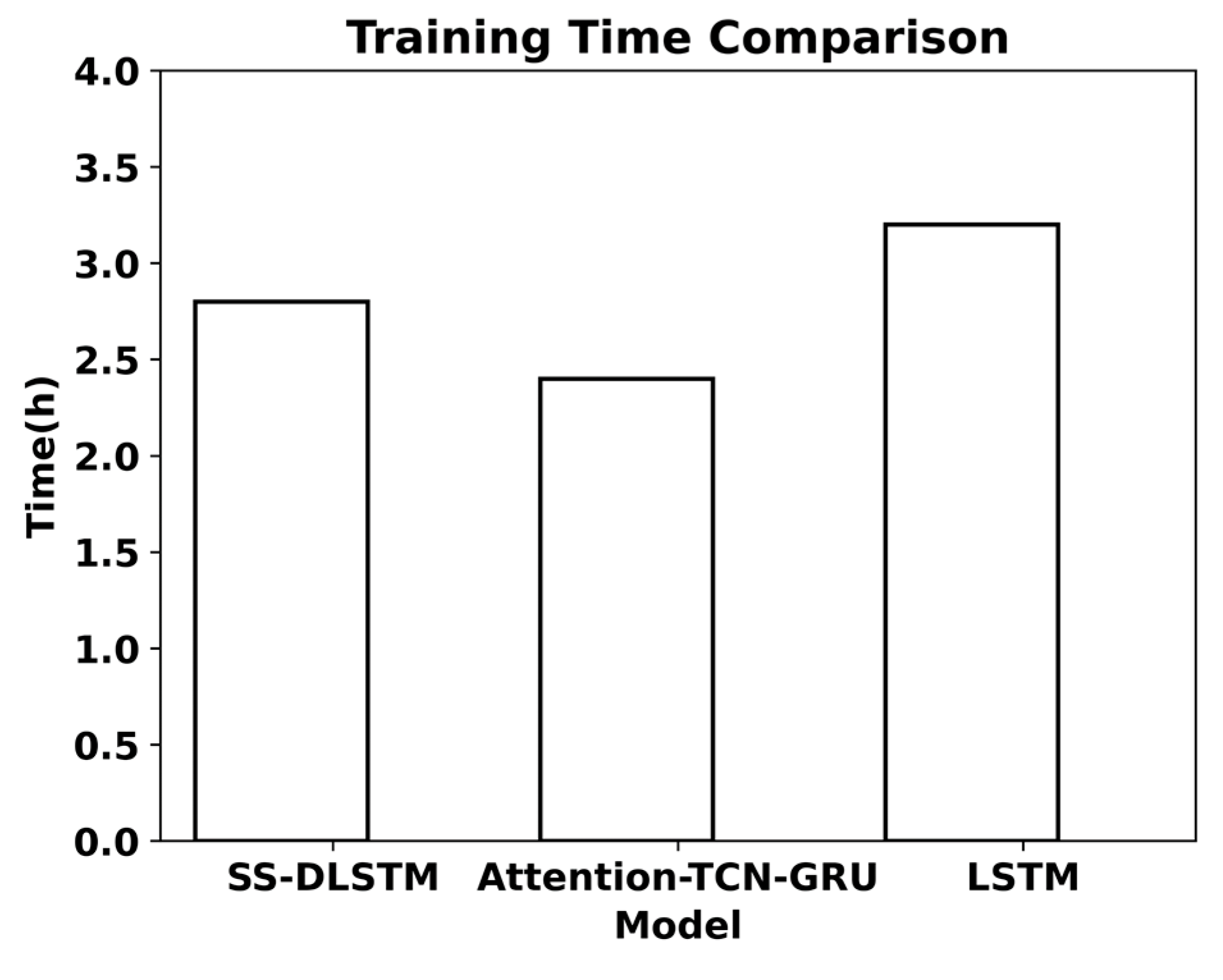
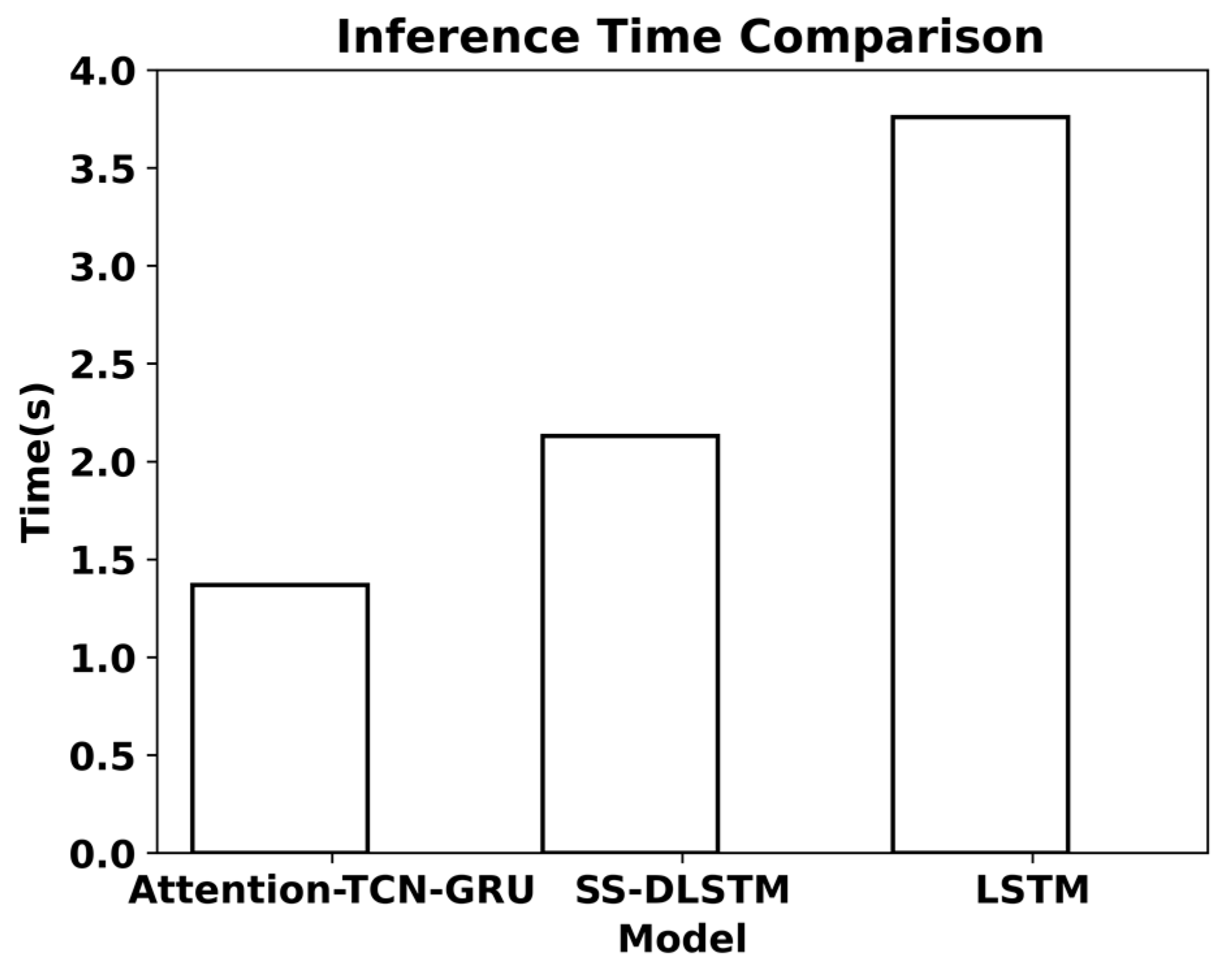
4.3.2. Model Complexity Analysis
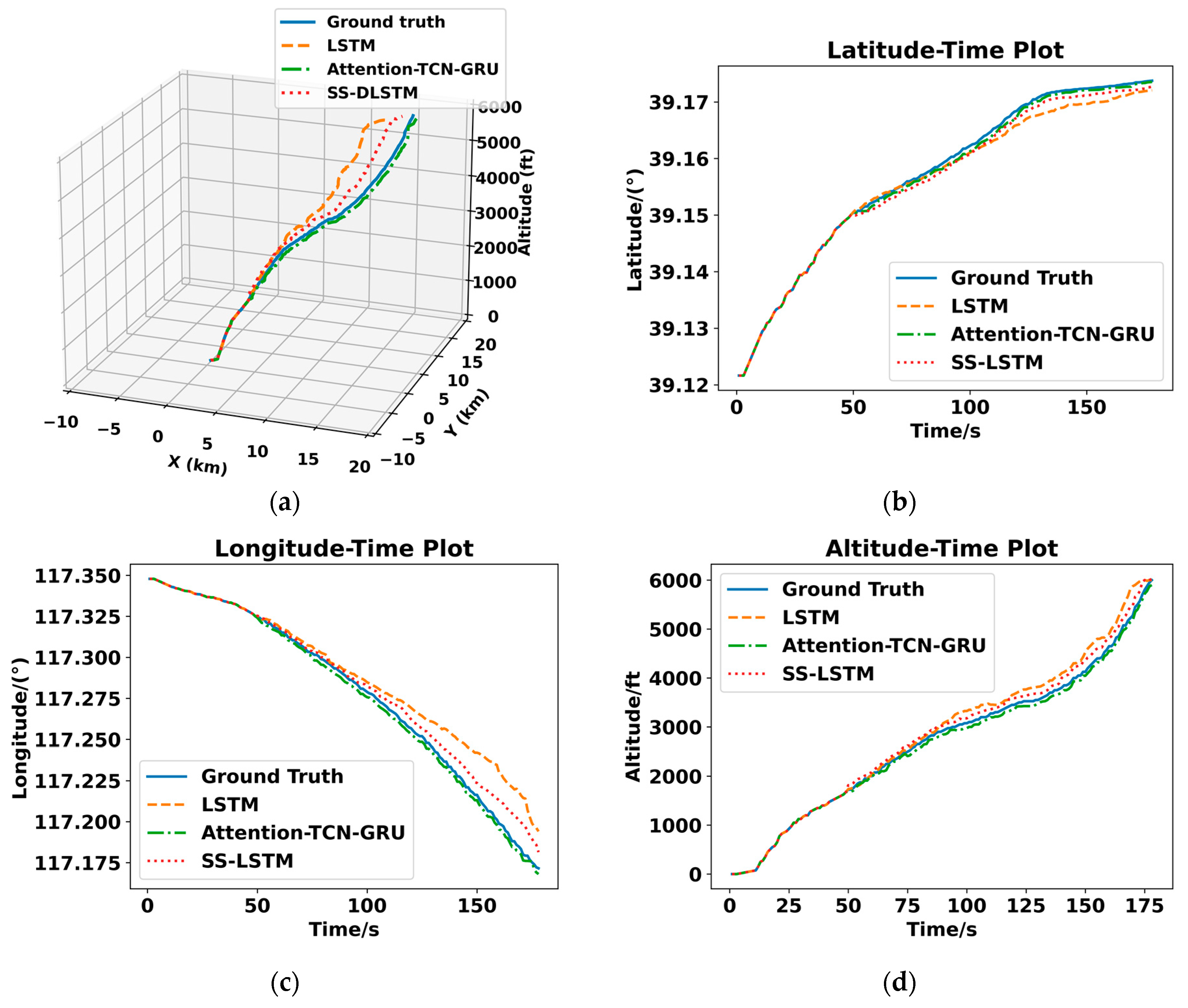
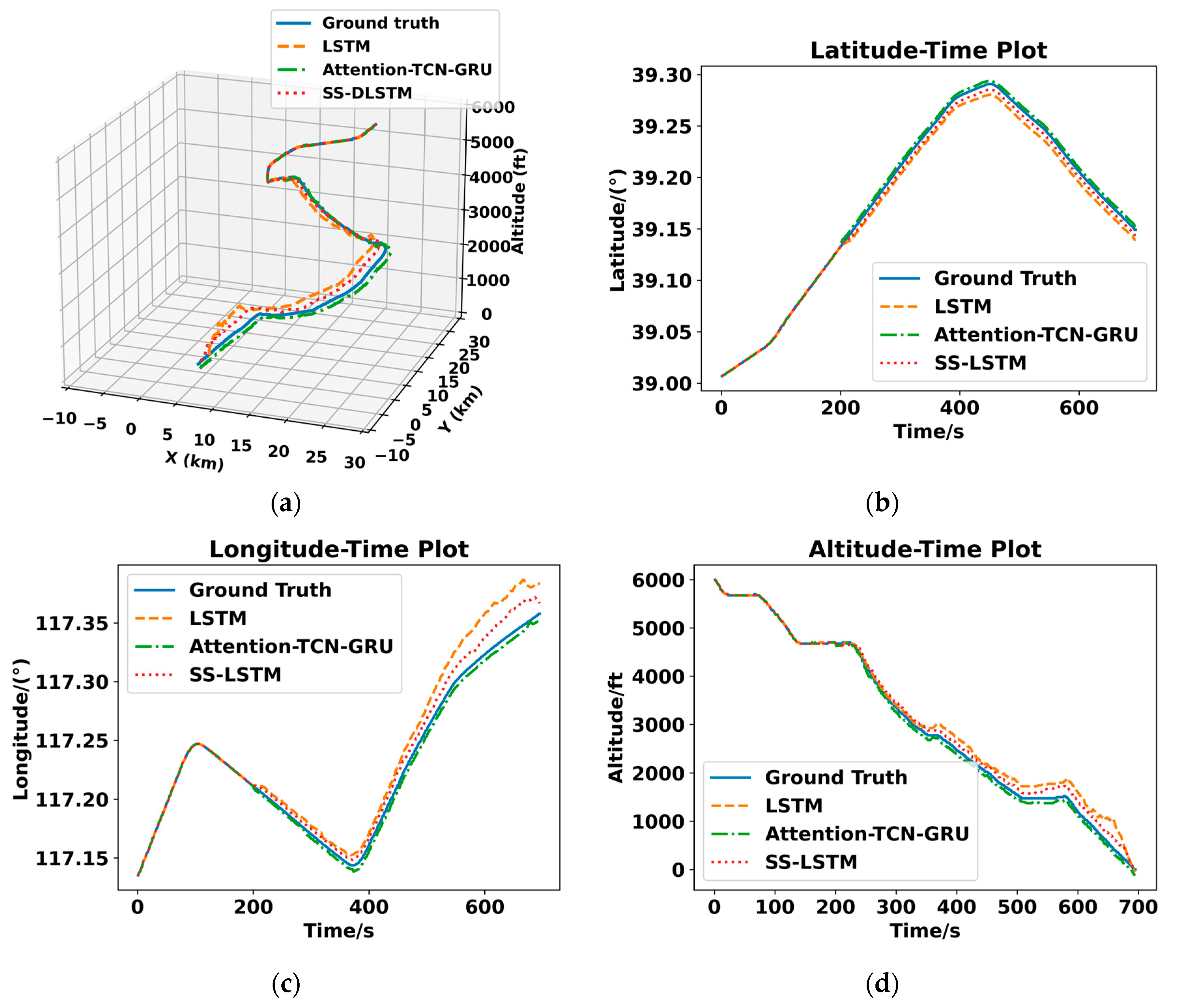
4.3.3. Comparative Analysis of Models
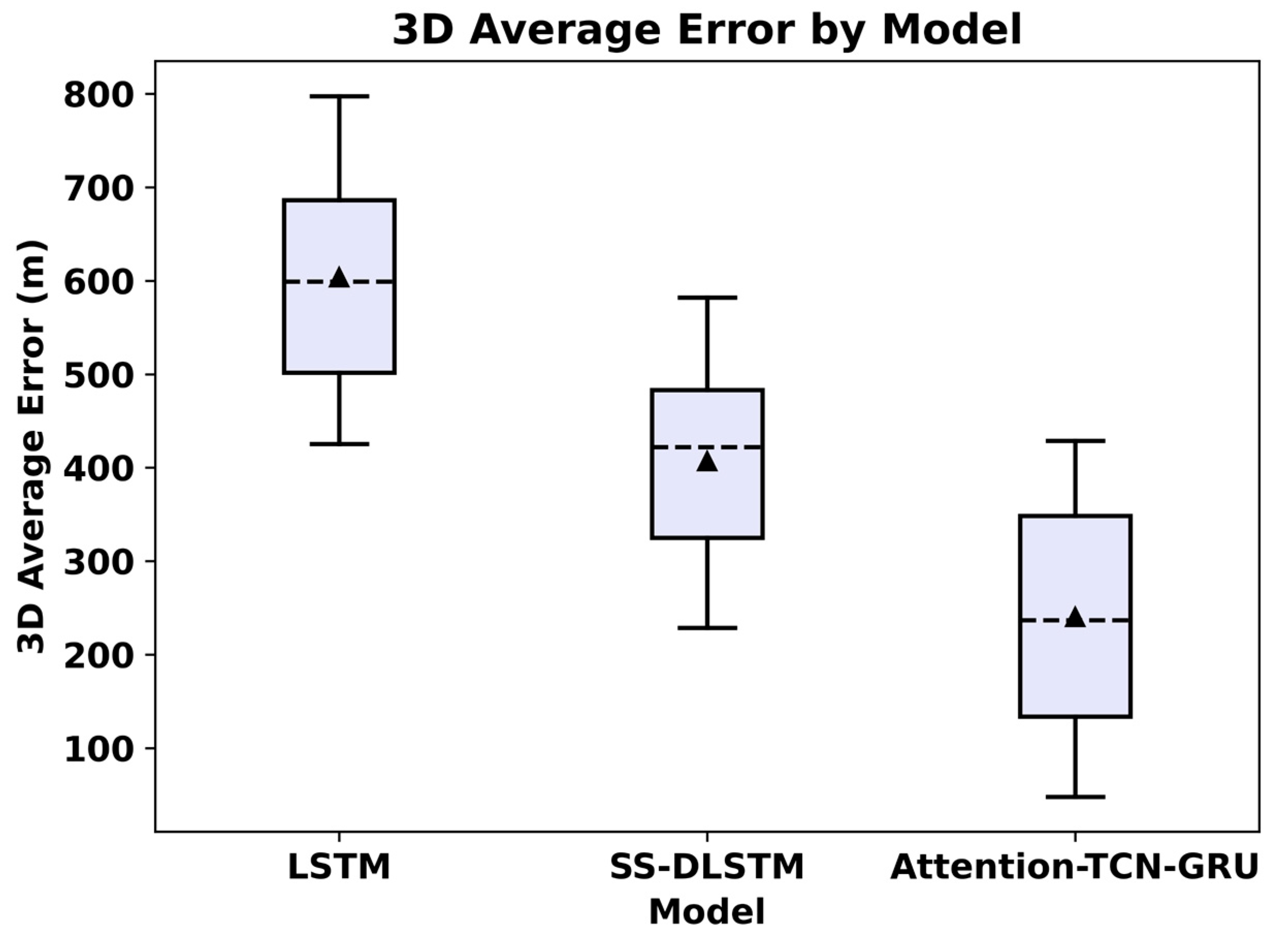
4.3.4. Comparison of Assessment Error Values
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chatterji, G. Short-term trajectory prediction methods, AIAA 1999-4233. In Proceedings of the Guidance, Navigation, and Control Conference and Exhibit, Portland, OR, USA, 9–11 August 1999. [Google Scholar]
- Gong, C.; McNally, D. A Methodology for Automated Trajectory Prediction Analysis, AIAA 2004-4788. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004. [Google Scholar]
- Lymperopoulos, I.; Lygeros, J.; Lecchini, A. Model Based Aircraft Trajectory Prediction during Takeoff, AIAA 2006-6098. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006. [Google Scholar]
- Rentas, T.; Green, S.; Cate, K. Characterization Method for Determination of Trajectory Prediction Requirements, AIAA 2009-6989. In Proceedings of the 9th AIAA Aviation Technology, Integration, and Operations Conference (ATIO), Hilton Head, CA, USA, 21–23 September 2009. [Google Scholar]
- Mondoloni, S. A Multiple-Scale Model of Wind-Prediction Uncertainty and Application to Trajectory Prediction, AIAA 2006-7807. In Proceedings of the 6th AIAA Aviation Technology, Integration and Operations Conference (ATIO), Wichita, KS, USA, 25–27 September 2006. [Google Scholar]
- Klooster, J.; Wichman, K.; Bleeker, O. 4D Trajectory and Time-of-Arrival Control to Enable Continuous Descent Arrivals, AIAA 2008-7402. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar]
- de Leege, A.; van Paassen, M.; Mulder, M. A Machine Learning Approach to Trajectory Prediction, AIAA 2013-4782. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Le Fablec, Y.; Alliot, J.-M. Using neural networks to predict aircraft trajectories. In Proceedings of the IC-AI, Las Vegas, NV, USA, 28 June–1 July 1999. [Google Scholar]
- Thipphavong, D.P.; Schultz, C.A.; Lee, A.G.; Chan, S.H. Adaptive Algorithm to Improve Trajectory Prediction Accuracy of Climbing Aircraft. J. Guid. Control. Dyn. 2013, 36, 15–24. [Google Scholar] [CrossRef]
- Han, Y.; Tang, X.; Han, S. Conflict-free 4D trajectory prediction based on hybrid system theory. J. Southwest Jiaotong Univ. 2012, 47, 1069–1074. [Google Scholar]
- Liu, W.; Hwang, I. Probabilistic trajectory prediction and conflict detection for air traffic control. J. Guid. Control. Dyn. 2011, 34, 1779–1789. [Google Scholar] [CrossRef]
- Ayhan, S.; Samet, H. Aircraft trajectory prediction made easy with predictive analytics. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 21–30. [Google Scholar]
- Wang, Z.; Liang, M.; Delahaye, D. Short-Term 4d Trajectory Prediction Using Machine Learning Methods. In Proceedings of the SESAR Innovation Day SID, Belgrade, Serbia, 28–30 November 2017. [Google Scholar]
- Hernández, A.M.; Magaña, E.J.C.; Berná, A. Data-driven aircraft trajectory predictions using ensemble meta-estimators. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; IEEE: New York, NY, USA, 2018; pp. 1–10. [Google Scholar]
- Barratt, S.T.; Kochenderfer, M.J.; Boyd, S.P. Learning probabilistic trajectory models of aircraft in terminal airspace from position data. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3536–3545. [Google Scholar] [CrossRef]
- Hong, S.; Lee, K. Trajectory prediction for vectored area navigation arrivals. J. Aerosp. Inf. Syst. 2015, 12, 490–502. [Google Scholar] [CrossRef]
- Alligier, R.; Gianazza, D.; Durand, N. Machine learning and mass estimation methods for ground-based aircraft climb prediction. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3138–3149. [Google Scholar] [CrossRef]
- Pang, Y.T.; Wang, Y.H.; Liu, Y.M. Probabilistic aircraft trajectory prediction with weather uncertainties using approximate Bayesian variational inference to neural networks. In Proceedings of the AIAA Aviation 2020 Forum, Virtual Event, 15–19 June 2020. [Google Scholar]
- Shi, Z.Y.; Xu, M.; Pan, Q. 4-D flight trajectory prediction with constrained LSTM network. IEEE Trans. Intell. Transp. Syst. 2021, 22, 7242–7255. [Google Scholar] [CrossRef]
- Fan, Z.; Lu, J.; Qin, Z. Aircraft Trajectory Prediction Based on Residual Recurrent Neural Networks. In Proceedings of the 2023 IEEE 2nd International Conference on Electrical Engineering, Big Data and Algorithms (EEBDA), Changchun, China, 24–26 February 2023; pp. 1820–1824. [Google Scholar]
- Tran, P.N.; Nguyen, H.Q.V.; Pham, D.-T.; Alam, S. Aircraft Trajectory Prediction with Enriched Intent Using Encoder-Decoder Architecture. IEEE Access 2022, 10, 17881–17896. [Google Scholar] [CrossRef]
- Wang, X.; Wang, J.; Hou, J.; Song, M.; Xu, W.; Li, J. TraNet: A Hybrid Deep Neural Network for Long-Time-Scale Aircraft Trajectory Prediction International Conference on Guidance, Navigation and Control; Springer Nature: Singapore, 2022; pp. 4408–4419. [Google Scholar]
- Zeng, W.; Quan, Z.; Zhao, Z.; Xie, C.; Lu, X. A deep learning approach for aircraft trajectory prediction in terminal airspace. IEEE Access 2020, 8, 151250–151266. [Google Scholar] [CrossRef]
- Jun, L.Z.; Alam, S.; Dhief, I.; Schultz, M. Towards a greener Extended-Arrival Manager in air traffic control: A heuristic approach for dynamic speed control using machine-learned delay prediction model. J. Air Transp. Manag. 2022, 103, 102250. [Google Scholar] [CrossRef]
- Lui, G.N.; Klein, T.; Liem, R.P. Data-driven approach for aircraft arrival flow investigation at terminal maneuvering area. In Proceedings of the AIAA Aviation 2020 Forum, Virtual Event, 15–19 June 2020; p. 2869. [Google Scholar]
- Wandelt, S.; Sun, X.; Fricke, H. ADS-BI: Compressed Indexing of ADS-B Data. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3795–3806. [Google Scholar] [CrossRef]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations using RNN Encoder–Decoder for Statistical Machine Translation. In Proceedings of the Conference on Empirical Methods in Natural Language Processing, Doha, Qatar, 25–29 October 2014. [Google Scholar]
- Fu, S.Q.; Li, Z.; Zhao, R.L.; Guo, J.X. Code Completion Approach Based on Combination of Syntax and Semantics. Ruan Jian Xue Bao J. Softw. 2022, 33, 3930–3943. Available online: http://www.jos.org.cn/1000-9825/6324.htm (accessed on 10 January 2024). (In Chinese).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Retrieve a Value | Parameters | Retrieve a Value |
|---|---|---|---|
| sliding window | 10 | TCN convolutional kernel | 3 |
| learning rate | 0.001 | expansion factor | [1, 2, 4] |
| batch size | 64 | GRU neurons | 250/150/120 |
| Parameters | Retrieve a Value | Parameters | Retrieve a Value |
|---|---|---|---|
| sliding window | 30 | TCN convolutional kernel | 5 |
| learning rate | 0.001 | expansion factor | [1, 2, 4, 8] |
| batch size | 128 | GRU neurons | 250/150/120/100 |
| Parameters | Grid Search Parameter Ranges |
|---|---|
| sliding window | 5, 10, 15, 20, 25, 30, 35, 40 |
| learning rate | 0.0001, 0.001, 0.002, 0.005, 0.01 |
| batch size | 16, 32, 64, 128, 256 |
| TCN convolutional kernel | 2, 3, 4, 5, 6, 7 |
| expansion factor | 1, 2, 4, 8, 16, 32 |
| GRU neurons | 100, 120, 150, 180, 200, 220, 250, 300 |
| Citing the Busyness Index? | Dimension | RMSE | MAE |
|---|---|---|---|
| NO | Latitude/(°) | 0.0027 | 0.0022 |
| Longitude/(°) | 0.0166 | 0.0113 | |
| Height/ft | 156.7 | 107.4 | |
| Time/s | 1.96 | 1.58 | |
| YES | Latitude/(°) | 0.0022 | 0.0019 |
| Longitude/(°) | 0.0138 | 0.0091 | |
| Height/ft | 131.4 | 96.5 | |
| Time/s | 1.86 | 1.47 |
| Model | Dimension | RMSE | MAE | Three-Dimensional MAE (m) |
|---|---|---|---|---|
| LSTM | Longitude/(°) | 0.0213 | 0.0163 | 611.57 |
| Latitude/(°) | 0.0041 | 0.0035 | ||
| Height/ft | 236.5 | 181.6 | ||
| Time/s | 2.93 | 2.31 | ||
| SS-DLSTM | Longitude/(°) | 0.0157 | 0.0104 | 396.28 |
| Latitude/(°) | 0.0033 | 0.0024 | ||
| Height/ft | 184.5 | 132.8 | ||
| Time/s | 2.07 | 1.69 | ||
| Attention-TCN-GRU | Longitude/(°) | 0.0102 | 0.0067 | 269.51 |
| Latitude/(°) | 0.0022 | 0.0019 | ||
| Height/ft | 131.4 | 96.5 | ||
| Time/s | 1.86 | 1.47 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, L.; Meng, X.; Wu, Z. Data-Driven 4D Trajectory Prediction Model Using Attention-TCN-GRU. Aerospace 2024, 11, 313. https://doi.org/10.3390/aerospace11040313
Ma L, Meng X, Wu Z. Data-Driven 4D Trajectory Prediction Model Using Attention-TCN-GRU. Aerospace. 2024; 11(4):313. https://doi.org/10.3390/aerospace11040313
Chicago/Turabian StyleMa, Lan, Xianran Meng, and Zhijun Wu. 2024. "Data-Driven 4D Trajectory Prediction Model Using Attention-TCN-GRU" Aerospace 11, no. 4: 313. https://doi.org/10.3390/aerospace11040313
APA StyleMa, L., Meng, X., & Wu, Z. (2024). Data-Driven 4D Trajectory Prediction Model Using Attention-TCN-GRU. Aerospace, 11(4), 313. https://doi.org/10.3390/aerospace11040313