
A Weighted Feature Fusion Model for Unsteady Aerodynamic Modeling at High Angles of Attack


Abstract
:1. Introduction
- (1)
- An architecture of an aerodynamic model is proposed, which combines the physics model and black-box model, exhibiting high accuracy in both interpolation and extrapolation tests.
- (2)
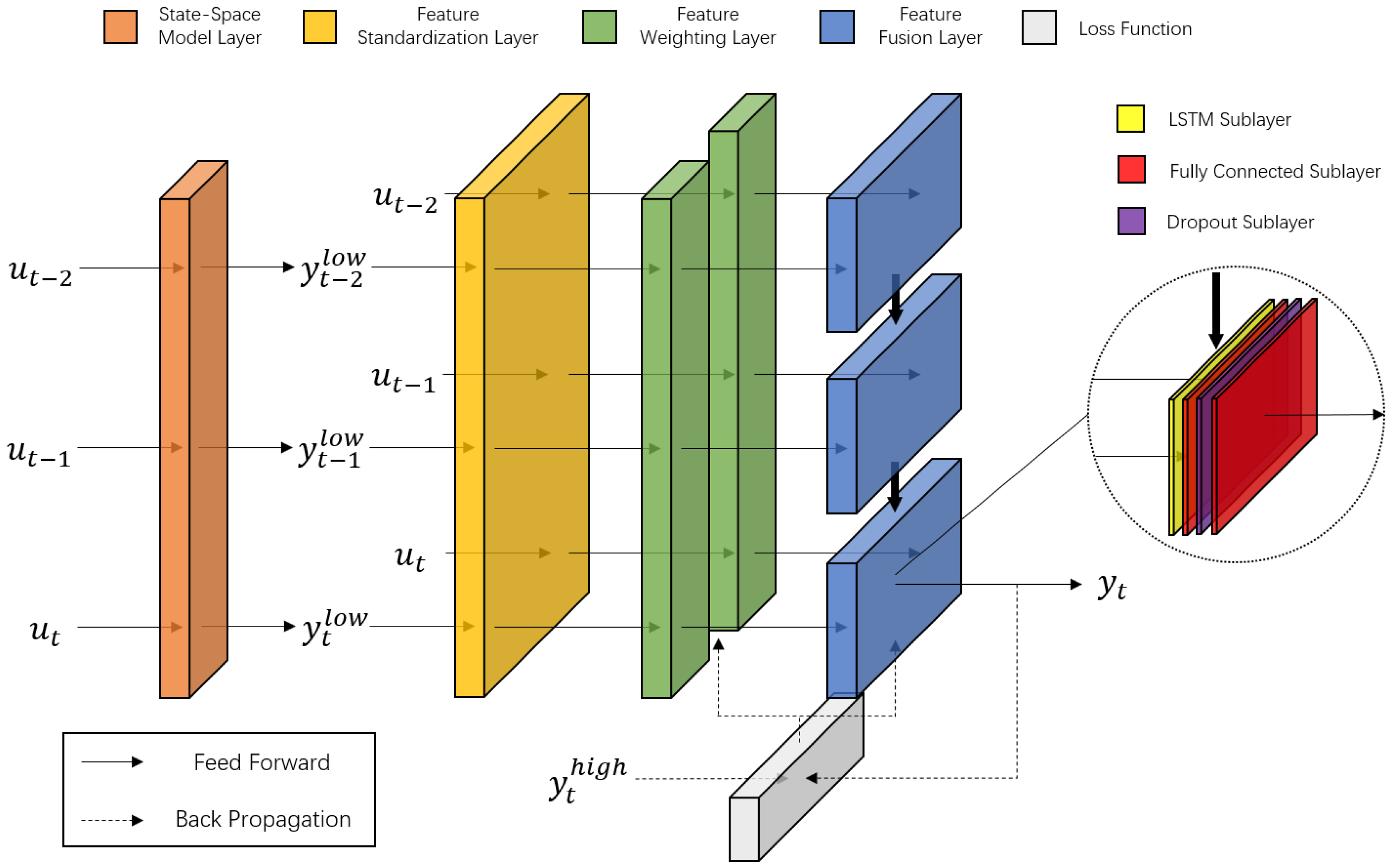
- A new method for weighting data is proposed. To reduce the impact of the state-space model error, the feature standardization layer and weighting layer, which is implemented using a single neuron and an activation function, are introduced.
- (3)
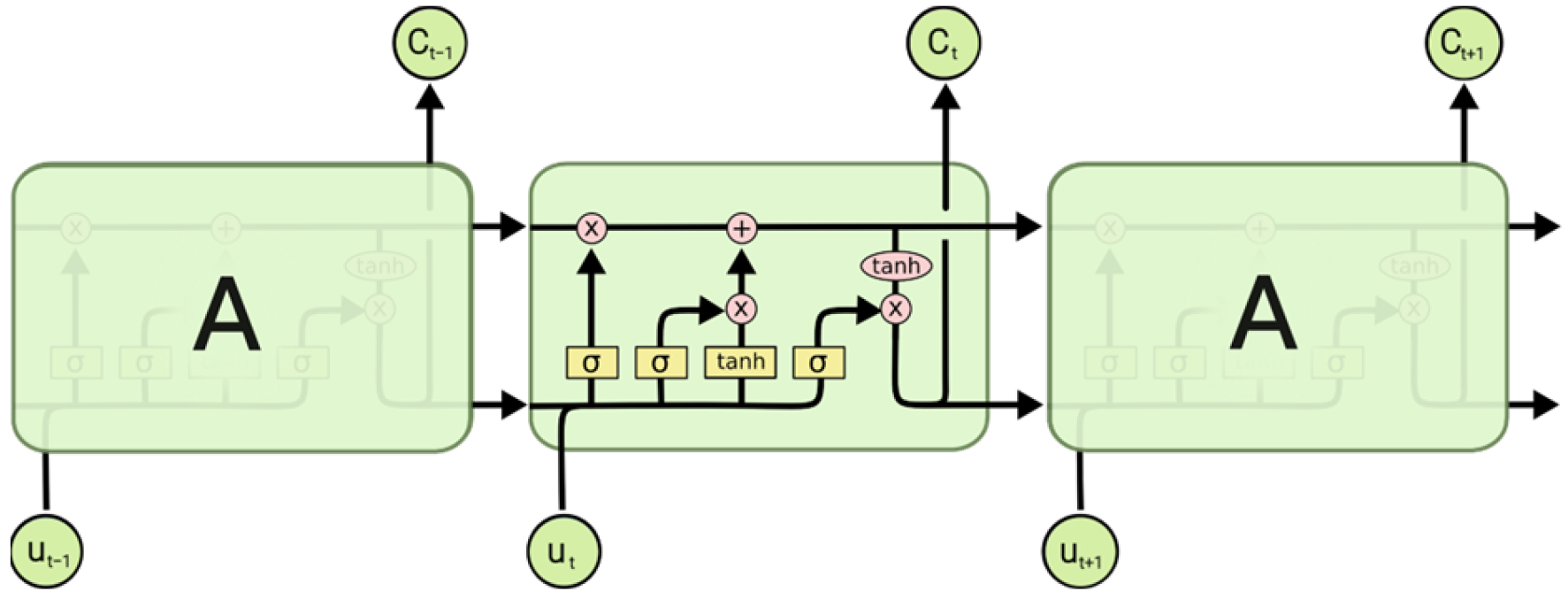
- Two mappings are established and fused by LSTM. One is the mapping from flight states to aerodynamic loads, and the other is the mapping from low-fidelity data to high-fidelity data.
- (4)
- To test the model, the proposed model is used to predict aerodynamic loads at high-angles-of-attack oscillations. Furthermore, the model is applied to a flight simulation of the F-16 with different control inputs to evaluate the generalization capability.
2. Modeling Methods
2.1. State-Space Method
2.2. Neural Network Approach
2.3. Weighted Feature Fusion Model
3. Validation and Discussion
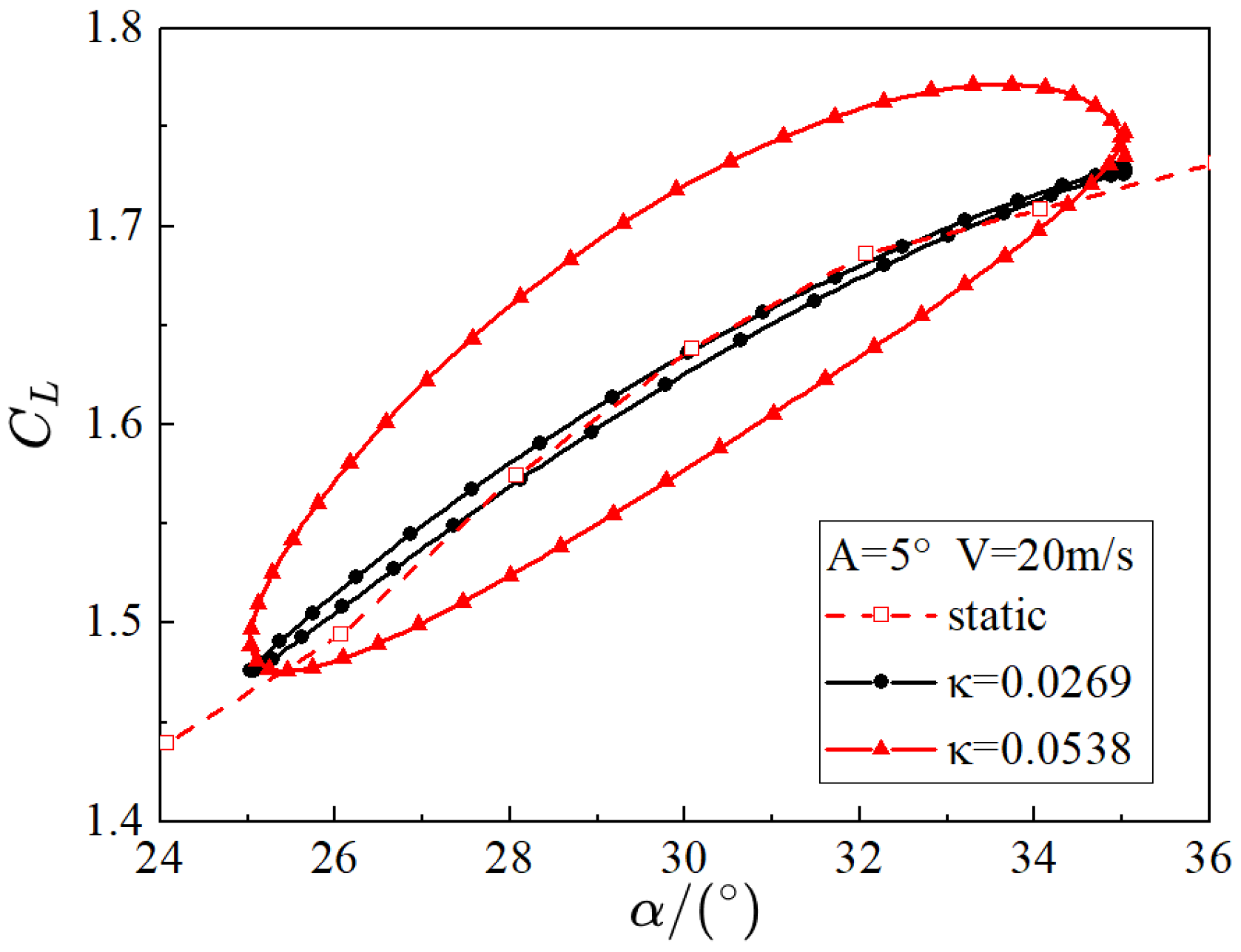
3.1. High-Angles-of-Attack Oscillation Tests
3.1.1. Experimental Data
3.1.2. Model Training
3.1.3. Model Testing
3.2. Flight Simulation Tests
3.2.1. Flight Simulation
3.2.2. Training Results for Sinusoidal Input
3.2.3. Testing Results for Sweep Input
3.2.4. Testing Results for Doublet Input
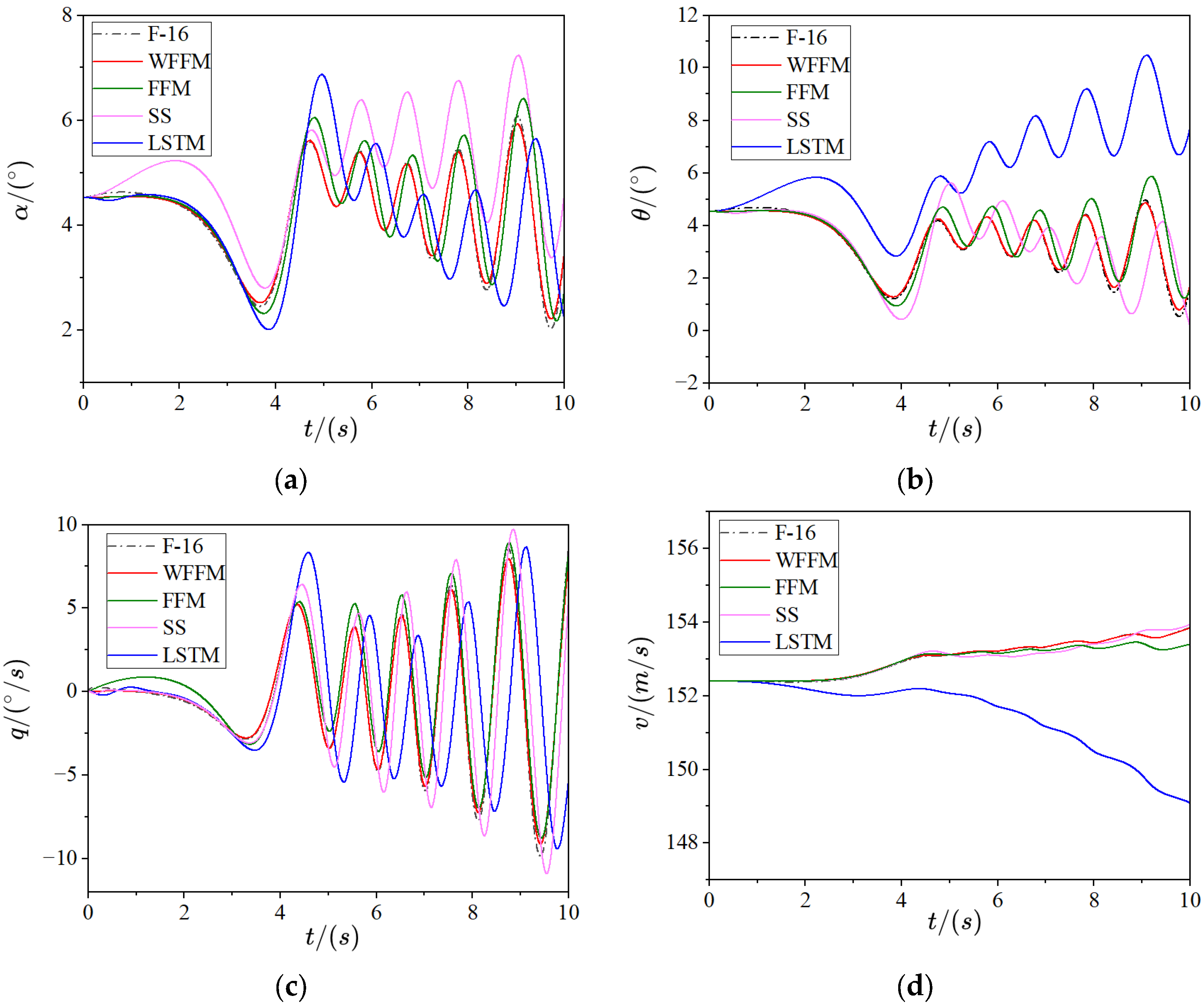
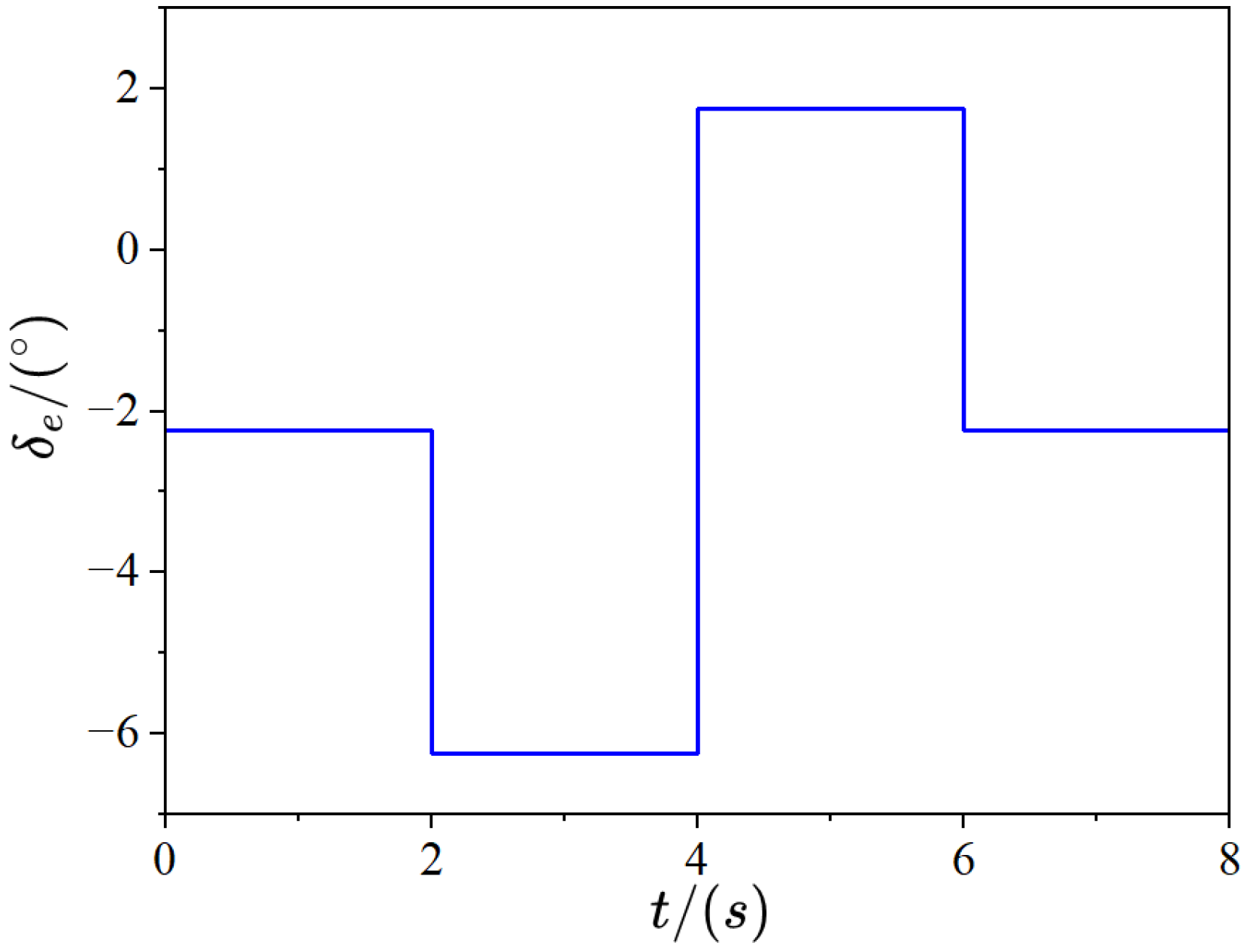
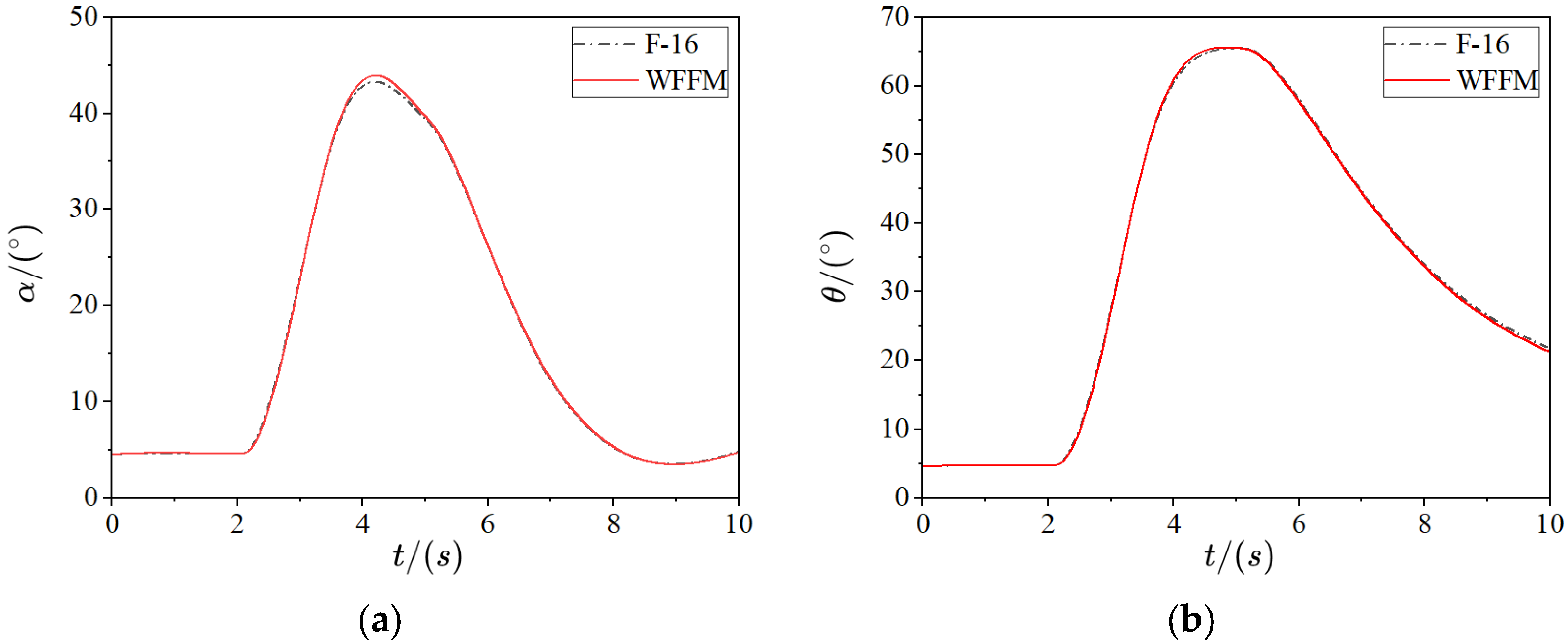
3.2.5. Testing Results for High-Angle-of-Attack Maneuvers
4. Conclusions
- (1)
- Compared to the black-box model, embedding the physics model with explicit physical meaning into the neural network improves both the interpolation and extrapolation capability of the model.
- (2)
- Compared to the FFM, further consideration of limiting the error of the physical model by introducing a weighted coefficient layer can improve the accuracy of aerodynamic prediction and simulation accuracy.
- (3)
- In flight simulation, the flight states based on the WFFM’s outputs are very close to the F-16 model’s, indicating that it can replace existing aerodynamic models.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bryan, G.H.; Williams, W.E. The Longitudinal Stability of Aerial Gliders. Proc. R. Soc. Lond. 1904, 73, 100–116. [Google Scholar] [CrossRef]
- Lin, G.-F.; Lan, C.; Brandon, J. A generalized dynamic aerodynamic coefficient model for flight dynamics applications. In Proceedings of the 22nd Atmospheric Flight Mechanics Conference, New Orleans, LA, USA, 11–13 August 1997. [Google Scholar]
- Mi, B.-G.; Zhan, H.; Lu, S.-S. An extended unsteady aerodynamic model at high angles of attack. Aerosp. Sci. Technol. 2018, 77, 788–801. [Google Scholar] [CrossRef]
- Hao, D.; Zhang, L.; Yu, J.; Mao, D. Modeling of unsteady aerodynamic characteristics at high angles of attack. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 233, 2291–2301. [Google Scholar] [CrossRef]
- Wang, X.; Kou, J.; Zhang, W. Unsteady aerodynamic modeling based on fuzzy scalar radial basis function neural networks. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 5107–5121. [Google Scholar] [CrossRef]
- Ghoreyshi, M.; Cummings, R. Aerodynamics Modeling of A Maneuvering Aircraft Using Indicial Functions. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012. [Google Scholar]
- Chen, S.; Gao, Z.; Zhu, X.; Du, Y.; Pang, C. Unstable unsteady aerodynamic modeling based on least squares support vector machines with general excitation. Chin. J. Aeronaut. 2020, 33, 2499–2509. [Google Scholar] [CrossRef]
- Wang, Q.; Qian, W.; He, K. Unsteady aerodynamic modeling at high angles of attack using support vector machines. Chin. J. Aeronaut. 2015, 28, 659–668. [Google Scholar] [CrossRef]
- Yetkin, S.; Abuhanieh, S.; Yigit, S. Investigation on the abilities of different artificial intelligence methods to predict the aerodynamic coefficients. Expert Syst. Appl. 2023, 237, 121324. [Google Scholar] [CrossRef]
- Xiong, F.; Zhang, L.; Hu, X.; Ren, C. A point cloud deep neural network metamodel method for aerodynamic prediction. Chin. J. Aeronaut. 2023, 36, 92–103. [Google Scholar] [CrossRef]
- Ignatyev, D.I.; Khrabrov, A.N. Neural network modeling of unsteady aerodynamic characteristics at high angles of attack. Aerosp. Sci. Technol. 2015, 41, 106–115. [Google Scholar] [CrossRef]
- Wu, H.; Liu, X.; An, W.; Lyu, H. A generative deep learning framework for airfoil flow field prediction with sparse data. Chin. J. Aeronaut. 2022, 35, 470–484. [Google Scholar] [CrossRef]
- Li, W.; Laima, S.; Jin, X.; Yuan, W.; Li, H. A novel long short-term memory neural-network-based self-excited force model of limit cycle oscillations of nonlinear flutter for various aerodynamic configurations. Nonlinear Dyn. 2020, 100, 2071–2087. [Google Scholar] [CrossRef]
- Li, K.; Kou, J.; Zhang, W. Deep neural network for unsteady aerodynamic and aeroelastic modeling across multiple Mach numbers. Nonlinear Dyn. 2019, 96, 2157–2177. [Google Scholar] [CrossRef]
- Wang, Q.; He, K.-F.; Qian, W.-Q.; Zhang, T.-J.; Cheng, Y.-Q.; Wu, K.-Y. Unsteady aerodynamics modeling for flight dynamics application. Acta Mech. Sin. 2012, 28, 14–23. [Google Scholar] [CrossRef]
- Chen, H.; He, L.; Qian, W.; Wang, S. Multiple Aerodynamic Coefficient Prediction of Airfoils Using a Convolutional Neural Network. Symmetry 2020, 12, 544. [Google Scholar] [CrossRef]
- Zuo, K.; Ye, Z.; Zhang, W.; Yuan, X.; Zhu, L. Fast aerodynamics prediction of laminar airfoils based on deep attention network. Phys. Fluids 2023, 35, 037127. [Google Scholar] [CrossRef]
- Faroughi, S.A.; Pawar, N.; Fernandes, C.; Raissi, M.; Das, S.; Kalantari, N.K.; Mahjour, S.K. Physics-Guided, Physics-Informed, and Physics-Encoded Neural Networks in Scientific Computing. arXiv 2023, arXiv:2211.07377. [Google Scholar]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Zhao, T.; Chen, G.; Wang, X.; Yong, E.; Qian, W. Aerodynamic modeling using an end-to-end learning attitude dynamics network for flight control. Acta Mech. Sin. 2022, 37, 1799–1811. [Google Scholar] [CrossRef]
- Kangli, L.; Zhiwei, S.; Junquan, F.; Weilin, T.S. Comparative analysis of three machine learning methods for unsteady aerodynamic modeling. Flight Dyn. 2023, 41, 33–39. [Google Scholar]
- Kou, J.; Zhang, W. Data-driven modeling for unsteady aerodynamics and aeroelasticity. Prog. Aerosp. Sci. 2021, 125, 100725. [Google Scholar] [CrossRef]
- Wang, X.; Kou, J.; Zhang, W.; Liu, Z. Incorporating Physical Models for Dynamic Stall Prediction Based on Machine Learning. AIAA J. 2022, 60, 4428–4439. [Google Scholar] [CrossRef]
- Huailu, L.; Xu, W.; Xiao, W. Aerodynamic modeling and flight simulation of maneuverable flight at high angle of attack. Acta Aeronaut. Et Astronaut. Sin. 2023, 44, 128410. [Google Scholar]
- Zhang, W.; Peng, X.; Kou, J.; Wang, X. Heterogeneous data-driven aerodynamic modeling based on physical feature embedding. Chin. J. Aeronaut. 2023, 37, 1–6. [Google Scholar] [CrossRef]
- Goman, M.; Khrabrov, A. State-space representation of aerodynamic characteristics of an aircraft at high angles of attack. J. Aircr. 1994, 31, 1109–1115. [Google Scholar] [CrossRef]
- Bryan, G.H. Stability in Aviation: An Introduction to Dynamical Stability as Applied to the Motions of Aeroplanes; Macmillan and Co., Ltd.: London, UK, 1911. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. Proc. Mach. Learn. Res. 2015, 37, 448–456. [Google Scholar]
- LeCun, Y.; Touresky, D.; Hinton, G.; Sejnowski, T. A theoretical framework for back-propagation. In Proceedings of the 1988 Connectionist Models Summer School, Pittsburgh, PA, USA, 17–26 June 1988; pp. 21–28. [Google Scholar]
- Xiao, Y.; Lin, Q.; Zheng, Y.; Bin, L. Model Aerodynamic Tests with a Wire-driven Parallel Suspension System in Low-speed Wind Tunnel. Chin. J. Aeronaut. 2010, 23, 393–400. [Google Scholar]
- Wang, X.G.; Lin, Q. Progress in wire-driven parallel suspension technologies in wind tunnel tests. Acta Aeronaut. Et Astronaut. Sin. 2018, 39, 6–25. [Google Scholar]
- Pan, J.; Lin, Q.; Wu, H.; Zhou, F.; Wang, X. Comparative experimental study on wind tunnel based on WDPR-8 and machetes tail support. J. Beijing Univ. Aeronaut. Astronaut. 2021, 47, 1038–1048. [Google Scholar]
- Wang, X.; Shen, C.; Jiang, H.; Lin, Q.; Ji, Y. Optimal Design and Verifications of Cable-Suspension Mechanism for High-Angle-of-Attack Unsteady Tests. J. Aircr. 2023, 60, 2017–2023. [Google Scholar] [CrossRef]
- Liu, C.M.; Zhao, Z.J.; Bu, C.; Wang, J.F.; Mu, W.Q. Double degree-of-freedom large amplitude oscillation test technology in low speed wind tunnel. Acta Aeronaut. Astronaut. Sin. 2016, 37, 2417–2425. [Google Scholar]
- Nguyen, L.T.; Ogburn, M.E.; Gilbert, W.P.; Kibler, K.S.; Brown, P.W.; Deal, P.L. Simulator Study of Stall/Post-Stall Characteristics of a Fighter Airplane with Relaxed Longitudinal Static Stability; National Aeronautics and Space Administration: Washington, DC, USA, 1979. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | Static | 0.2 Hz | 0.6 Hz |
|---|---|---|---|
| MSE |
| WFFM | FFM | LSTM | SS | |
|---|---|---|---|---|
| MSE |
| WFFM | FFM | LSTM | SS | |
|---|---|---|---|---|
| MSE |
| Parameter | Value | Unit |
|---|---|---|
| 4572 | m | |
| 152 | m/s | |
| 4.53 | deg | |
| 4.53 | deg | |
| −2.24 | deg | |
| 0.46 | - |
| Set 1 | Set 2 | |||||||
| WFFM | 0.9995 | 0.9997 | 0.9981 | 0.9999 | 0.9982 | 0.9986 | 0.9984 | 0.9996 |
| FFM | 0.9793 | 0.9862 | 0.9607 | 0.9977 | 0.9021 | 0.8197 | 0.9861 | 0.9596 |
| SS | 0.9738 | 0.9574 | 0.9629 | 0.9989 | 0.8104 | 0.6463 | 0.9726 | 0.9543 |
| LSTM | 0.7666 | 0.8578 | 0.7212 | 0.9637 | 0.7979 | 0.6805 | 0.8875 | 0.7045 |
| Average | |||||
| WFFM | 0.9997 | 0.9997 | 0.9995 | 0.9999 | 0.9997 |
| FFM | 0.9928 | 0.9790 | 0.9879 | 0.9983 | 0.9895 |
| SS | 0.9661 | 0.9589 | 0.9359 | 0.9936 | 0.9636 |
| LSTM | 0.8551 | 0.8252 | 0.8186 | 0.9973 | 0.8741 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, W.; Wang, X.; Lin, Q.; Cheng, C.; Zhu, L. A Weighted Feature Fusion Model for Unsteady Aerodynamic Modeling at High Angles of Attack. Aerospace 2024, 11, 339. https://doi.org/10.3390/aerospace11050339
Dong W, Wang X, Lin Q, Cheng C, Zhu L. A Weighted Feature Fusion Model for Unsteady Aerodynamic Modeling at High Angles of Attack. Aerospace. 2024; 11(5):339. https://doi.org/10.3390/aerospace11050339
Chicago/Turabian StyleDong, Wenzhao, Xiaoguang Wang, Qi Lin, Chuan Cheng, and Liangcong Zhu. 2024. "A Weighted Feature Fusion Model for Unsteady Aerodynamic Modeling at High Angles of Attack" Aerospace 11, no. 5: 339. https://doi.org/10.3390/aerospace11050339
APA StyleDong, W., Wang, X., Lin, Q., Cheng, C., & Zhu, L. (2024). A Weighted Feature Fusion Model for Unsteady Aerodynamic Modeling at High Angles of Attack. Aerospace, 11(5), 339. https://doi.org/10.3390/aerospace11050339