
Multiple-Scenario Unmanned Aerial System Control: A Systems Engineering Approach and Review of Existing Control Methods

Abstract
:
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Problem Definition
3. System Design
3.1. System Requirements
- develop and demonstrate the value of collaborative autonomy in a tactical context;
- rapidly transition the capability to the warfighter;
- develop an enduring framework to expand the range of missions, platforms, and capabilities that can leverage collaborative autonomy; and
- develop an open architecture that enables all members of the rich community of unmanned systems and autonomy researchers to contribute to current and future capabilities.
- Mission Efficiency:Mission efficiency is an important requirement for both military and civilian operations. The cost of completing the mission needs to be considered. The expense of flying the vehicle along with the duration required to complete the mission are critical concerns for all parties involved. Additionally, the ability to quickly react to changes in mission requirements or system functionality is critical for robust systems of the future. The bulk of the review of current capabilities in existing systems will relate to mission efficiency and control of the system. Mission efficiency can be considered in countless manners, including time to complete the mission (time efficiency), fuel used to complete the mission (fuel efficiency), endurance of mission (endurance), and total number of tasks completed (task efficiency).
- Communication requirements:Limited communication frequencies will be available in the future. Limited bandwidth and minimization of communication will be required in future operations and will be a feature for more autonomous vehicles. Additionally, communication in a denied electronic environment will necessitate limited communications. The ability to have communications in unique environments with cognitive capabilities will be required in the future [13].
- Manning:Currently, the ratio of operators to vehicles is many-to-one but in the future the desire is to flip the ratio to be one-to-many. To support this change in operational manning, a significant increase in system autonomy must be created. A system must be able to automate its mission path and plan with minimal operator inputs. Hierarchical logic for decision making must be implemented to ensure the most effective completion of the mission and rapid response to mission or system changes. The system must be able to react to both external inputs (operator) and internal inputs (system and sensor data). Additionally, unique challenges of training and educating future operators will be critical [14]. The review of current capabilities of algorithms and autonomous features as it relates to mission efficiency will incorporate the considerations of reduction in manning of operations.
- Command Station:Future command stations must be robust and provide significant situational awareness for the operator. Being able to command vehicles from a mobile or fixed-based control station will be necessary to ensure flexibility in capabilities. Interfaces that enable the operator to quickly upload new tasks and parameters will be necessary. Limited command station requirements and current capabilities will be addressed in this paper.
- Openness of the architecture:Open system architecture is a key of any current and future system viability. To provide a system architecture that can be utilized across multiple system sizes and types it must employ an open architecture to minimize the costs of integration with any existing or new systems. The design proposed in this paper attempts to provide a framework architecture that would satisfy current open architecture standards. Limited review of open architecture requirements will be addressed in this paper.
- Multi-mission capability:The ability of a system to perform multiple missions will be critical for future viability. Some airframes may not lend themselves to transition across the four primary mission types of ISR, loiter, delivery, and attack. However, a system that operates primarily in one or two mission areas should be able to perform multiple roles within those mission areas. For example, a system that has a primary role of ISR should be able to perform recurring observation of fixed targets but also be able to transition to tracking of moving targets or persistent observation over a fixed target. The ability of systems to perform multiple missions will be discussed throughout the paper.
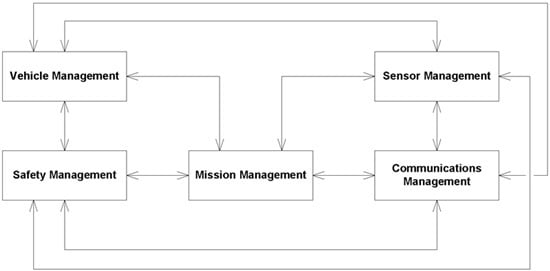
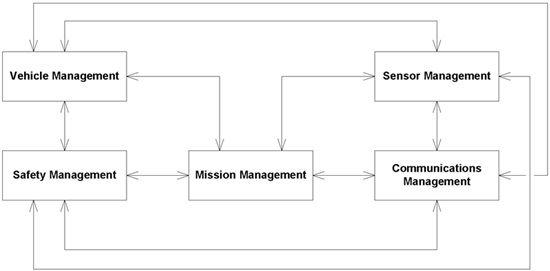
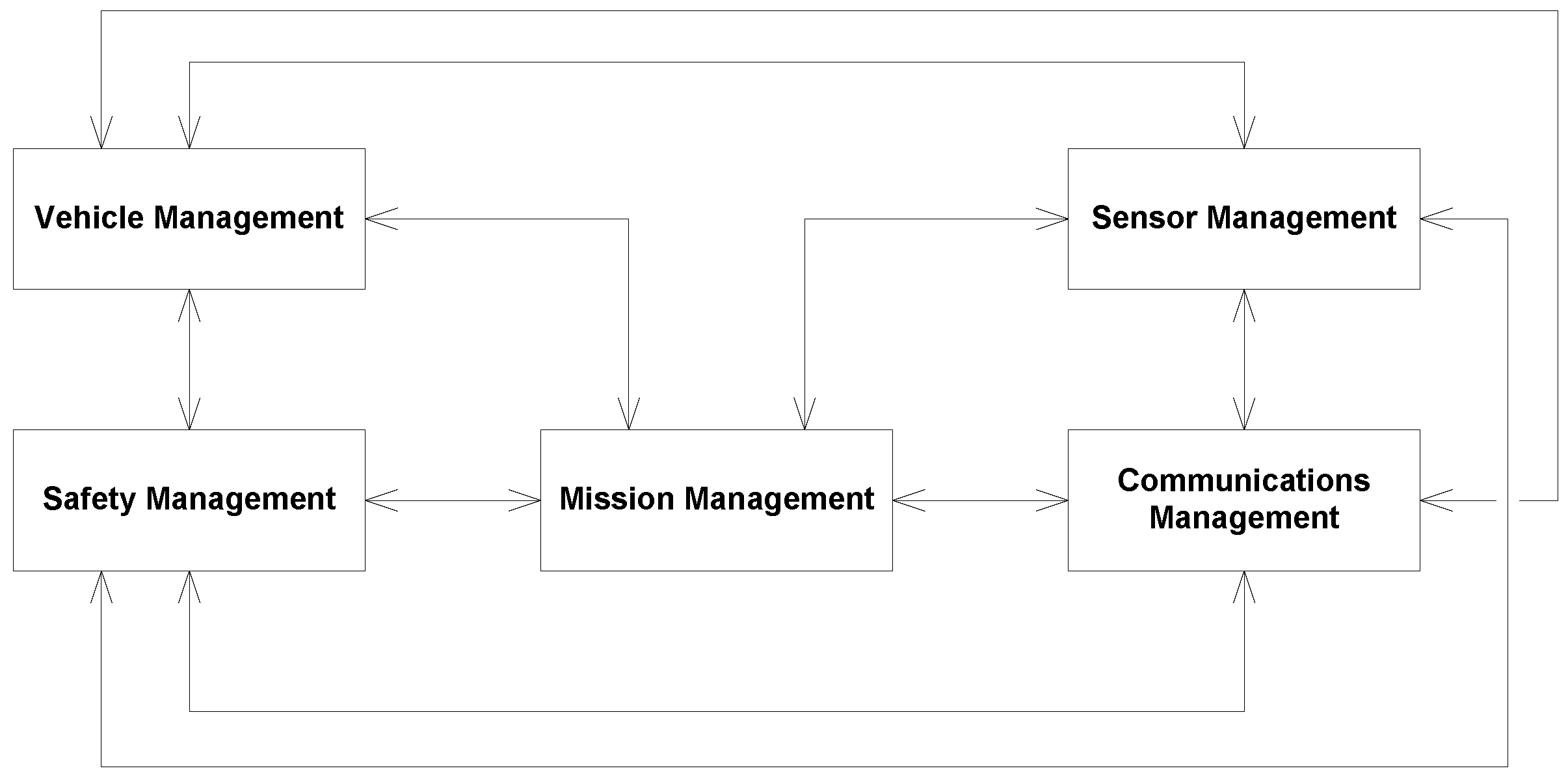
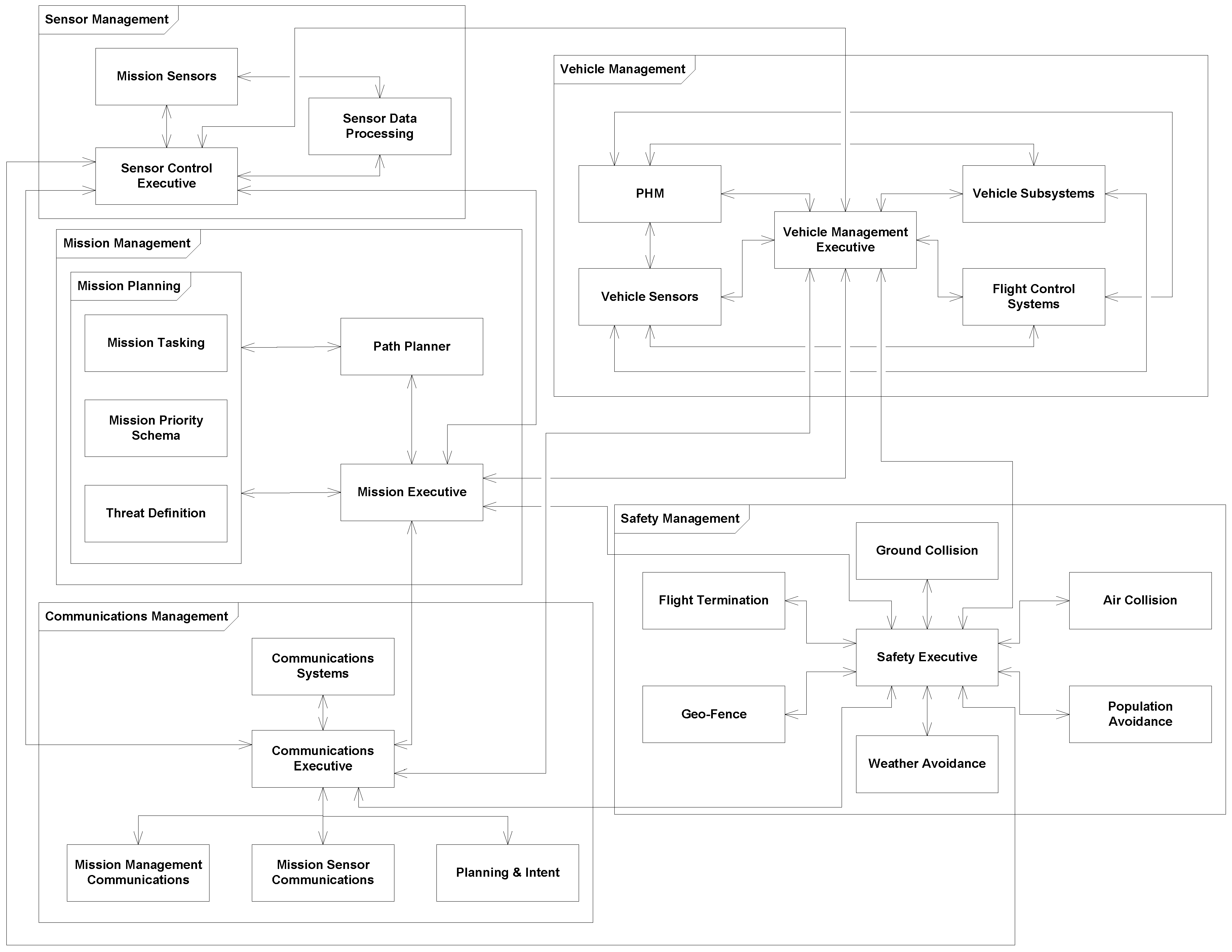
3.2. System Architecture


- Mission Management:The mission management function is the key to the success of the system architecture. A significant portion of the efforts in this area would be consistent with the work of Boskovic, et al. [15] as discussed earlier. The mission management will provide the primary high-level decision making for the mission performance of the vehicle. The mission management area is the focus of significant research in unmanned and autonomous control. There are three primary functions within the Mission Manager:
- (a)
- Mission Planning:The mission planning function provides the mission requirement details for the decision-making process of the mission executive. A mission-planning dataset could include definitions of tasks, priorities, and threats. The mission-planning dataset could be uploaded prior to a mission, during a mission, or self created depending on the autonomous capabilities designed within the system. The mission-tasking information would provide the required tasks the system is desired to perform. A mission-priority schema would provide the executive a decision framework to determine which task is of greater priority. For example, tracking a moving target could be defined as a higher priority than general reconnaissance data collection. Threat definition would provide the system considerations for areas to avoid due to known threats as well as considerations for how to handle newly discovered threats. These considerations could include keep-out zones, self protection actions with sensors, or other actions depending upon system capabilities.
- (b)
- Path Planner:The path planner is the key algorithm for defining where and how the vehicle should move. The path planner utilizes the considerations defined in the mission planning along with information provided (via the mission executive) on system states. The path planning algorithms could be dynamic or changed for any given mission based upon the needs, priority, and other considerations. The path planner must also determine path planning based upon contingency management requirements of the system for subsystem failures. The path-planning algorithm is a significant consideration of this paper and current capabilities are discussed later in this paper.
- (c)
- Mission Executive:The Mission Executive (ME) is the primary decision maker for the vehicle. The functionality of the ME defines whether to perform the current task defined by the path planner or reacts to safety management information. The ME also provides and receives communication updates with other vehicles, operators, and other sources as required. The ME commands the vehicle management system to perform flight maneuvers and other vehicle system functionality. The ME could be considered equivalent to a human operator within a manned vehicle system.
- Sensor ManagementSensor Management provides the control for all the mission sensors installed on the vehicle. Mission sensors are defined as any sensor utilized to perform the mission. Sensors that are used to manage the vehicle control and health are handled within vehicle management. There may be some cross utilization of these sensors for both systems. However, the management of those sensors would be handled by their primary user. Portions of sensor management, such as sensor types and control, are well understood in existing systems. However, the sensor data processing will require continued and significant research to provide autonomous sensor data at a decision level that can be trusted. There are three key functions within the sensor management framework.
- (a)
- Mission Sensors:Mission sensors are the sensors specifically installed on the aircraft for data gathering in direct support of mission completion. The mission sensors will be dependent upon the vehicle and mission requirements. These sensors will perform the primary mission duties and could include electro-optical/infrared sensors, radar sensors, radio frequency sensors, or any number of other types. The sensors will have a direct interface to the data-processing module and the control-executive module. These sensors will perform their tasks based upon commands received from the sensor-control executive.
- (b)
- Sensor-Data Processing:The sensor-data processor will analyze received data and make a decision on the information received based upon algorithms defined. The processing could be utilized for any number of tasks including target recognition, geo-location, target motion, and sensor response. The data will also be processed for transmission, as required, and sent to the sensor-control executive for passage to the communication management for dissemination. A significant level of research is ongoing in areas of sensor data fusion, image processing, and recognition that can support decisions and vehicle tasking.
- (c)
- Sensor Control Executive:The sensor-control executive (SCE) is the primary controller of all sensors and sensor taskings. The SCE interfaces with the ME and provides sensor availability, sensor capability, sensor data evaluation (target ID, geo-location, etc.), and sensor health. The ME provides the SCE with sensor tasking. The SCE will be required to automatically identify what sensors it has installed on board and what their capabilities are.
- Safety ManagementSafety Management provides overall safety monitoring for the vehicle. The types of safety management performed can be dependent upon vehicle type, sensors installed, capabilities required, and vehicle capabilities. The systems defined in this architecture are notional but are critical for UASs. The safety executive can provide high-priority tasking to the mission executive that can result in overriding current activities for safety reasons. Safety management is an area that is understood, but the integration of it with autonomous systems continues to be researched and developed across vehicle types. The core safety management functions defined in this architecture are explained here, but are not exhaustive of possible functions.
- (a)
- Safety Executive:The Safety Executive (SE) processes all information from safety management capabilities and provides that information to the mission executive for execution. The SE will prioritize which safety feature should be addressed first (if multiple safety issues are occurring at the same time) and determine the recommended actions.
- (b)
- Collision Avoidance:Collision Avoidance algorithms for both ground collision and air-to-air would reside within the safety management area. These algorithms would determine when the vehicle is at risk of impacting something and provide recommended action(s) to avoid these problems.
- (c)
- Flight Termination:Flight Termination is a key issue for unmanned air vehicles. Flight termination can include destructive actions which result in the destruction of the vehicle. However, it can also contain contingency efforts that include immediate landing, reduction in system capabilities, flight-plan alteration, or other functionalities depending upon the mission and range requirements.
- (d)
- Geo-Fence:The geo-fence capability defines the areas within or outside of which a vehicle should maintain a presence. There may be unique mission requirements that require a system to fly in certain areas which the geo-fence may not allow based upon changes in mission or knowledge of areas of operation. If the vehicle is approaching a fence limit or has crossed a fence, the safety system should direct the vehicle back within the defined boundary. This geo-fence could be dynamic based upon known aircraft (air collision avoidance), major changes in weather (weather avoidance), or known threats and borders.
- (e)
- Weather Avoidance:Depending on vehicle capabilities or mission sensor capabilities and requirements there may be a need to avoid undesirable weather. Weather avoidance would provide keep-out areas to the safety executive that could be provided to either the mission executive or the geo-fence capability for management of vehicle path. For sensor functionality issues it would be more critical to provide that information to the mission executive for determination of path route and sensor tasking.
- (f)
- Population Avoidance:Mission requirements may require the vehicle to perform tasks in areas with significant or critical populations. As a result, there may be a need to fly close to population but avoid interference or impact with people and activities. The population avoidance functionality would determine where the vehicle needs to be to avoid the population of concern and provide the safety executive of how to react to the given situation.
- Communications ManagementCommunications Management provides the key interface between the vehicle and other systems. The ability to send and receive both mission information and sensor data can be critical to the success of a given mission. By managing communications separately from the primary processes, it enables changes in communication methods without impacting the underlying functionality of the vehicle. Communications Management will divide the data as either mission management, mission sensor, and planning and intent. There are five primary functions within the Communications Manager:
- (a)
- Communications Executive:The communications executive provides the primary interface between the mission executive and the installed communication systems. The communication systems installed could vary depending on the vehicle type and mission requirements. The communication executive will provide external communications and data dissemination as required. The system will also need to recognize when communications are not being received for potential operations in a denied environment.
- (b)
- Communications Systems:The vehicle could have one or multiple communication systems installed for external communications capabilities dependent on mission requirements and vehicle capabilities. Communication types could include line of sight RF, satellite communications, optical/laser or others. Dissemination of data received and to be sent will be via the communications executive.
- (c)
- Mission Management Communications:Mission management communications will provide mission status, priority, tasking, and threat information for other vehicles. The communications executive will also update this information from any received data for processing via the mission executive.
- (d)
- Mission Sensors Communications:The mission sensor data will be processed and sent separately from other priority tasks (mission management, planning and intent) to provide external users with specific sensor data for analysis and use. By handling the mission sensor data separately from the other data, it prevents critical data being held up by sensor data dissemination. Mission and vehicle tasking data should take priority over data dissemination tasks. This separation will also enable a system to have separate communication systems for data and mission tasks.
- (e)
- Planning and Intent:The planning and intent data will provide current information on where the vehicle is, where it is going and the intents of its upcoming efforts. This will allow any other vehicles or operators in the mission to monitor and understand the plans of the vehicle. This information will enable users and vehicles to make decisions and recommendations on mission plans and efforts.
- Vehicle ManagementThe Vehicle Management system is responsible for the control of the vehicle and systems. The flight control system, vehicle subsystems, vehicle state (via Prognostics and Health Monitoring (PHM) and sensors) all reside within the vehicle management system. Vehicle management is well understood and is standard in most manned and unmanned aircraft. While there is significant research and work ongoing in this area, especially in the areas of PHM and fault tolerant operations, the underlying requirements and architecture are not significantly different from existing platforms. There are five primary areas within the vehicle management system.
- (a)
- Vehicle Management Executive:The Vehicle Management Executive (VME) manages the vehicle systems control and processing. The mission executive provides the tasking that the vehicle must perform and provide for processing. The data provided is then sent to the flight control systems, vehicle systems, and any other ancillary systems installed that require control. The VME also accepts sensor data and PHM data for processing and determination of whether degraded systems exist and if actions need to be taken. This data is also provided to the mission executive for mission tasking decisions.
- (b)
- Flight Control Systems:The Flight Control Systems (FCS) of a vehicle can include propulsion, flight control surfaces, flight control sensors, and any other system required for vehicle control. The FCS design and performance is unique to any given vehicle and needs to be provided to the path planner for determination of proper, efficient, and effective path planning.
- (c)
- Vehicle Subsystems:Vehicle subsystems can include ancillary systems such as electrical, hydraulic, environmental controls, and landing gear. These subsystems provide critical functionality that support the primary flight controls and mission sensors. Subsystems are generally well understood for existing areas but new and improved capabilities (especially in electrical power capabilities) continue to improve the state of these systems.
- (d)
- Prognostics and Health Monitoring:Prognostics and Health Monitoring (PHM) can provide an estimate of current and future health and capabilities of installed systems. Significant research has been performed and continues to be performed in this area. Fault tolerant design and functions also continue to be researched and can be integrated with PHM functionalities. PHM may or may not be present on a given vehicle but can provide enhanced control and insight into current and future performance.
- (e)
- Vehicle Sensors:Vehicle Sensors can be numerous and diverse across a vehicle. Depending on the size of the vehicle and criticality of the system there may be minimal or extensive sensing. The sensors can include critical flight data such as vehicle speed, rates, and accelerations via air data and/or inertial systems. Sensors can also perform pressure, temperature, voltage, or other critical measurements to support real-time performance or prognostics of future performance. Vehicle sensors continue to evolve and develop based upon new technology and needs.
3.3. System Needs
4. Review of Existing Methods and Capabilities
4.1. Path Planning
4.1.1. Fixed Target
4.1.2. Moving Target
4.1.3. Target Search and Surveillance
4.1.4. Multiple Objective
4.1.5. Multiple Aircraft
4.2. Safety Controls
4.2.1. Run-Time Assurance
4.2.2. Collision Avoidance
4.2.3. Boundary Control
4.2.4. Test Safety
5. Improvement Areas
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Teal Group Predicts Worldwide UAV Market Will Total $91 Billion in Its 2014 UAV Market Profile and Forecast. Available online: http://www.tealgroup.com/index.php/about-teal-group-corporation/press-releases/ 118-2014-uav-press-release (accessed on 19 August 2015).
- Valvanis, K.; Vachtsevanos, G. Future of Unmanned Aviation. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015; pp. 2993–3009. [Google Scholar]
- DARPA Collaborative Operations in a Denied Environment (CODE). DARPA-BAA-14-33. Available online: https://www.fbo.gov/spg/ODA/DARPA/CMO/DARPA-SN-14-28/listing.html (accessed on 30 November 2015).
- DARPA Distributed Battle Management Program. DARPA-BAA-14-17. Available online: https://www.fbo.gov/spg/ODA/DARPA/CMO/DARPA-BAA-14-17/listing.html (accessed on 30 November 2015).
- Otto, R.P. Air Force ISR 2023: Delivering Decision Advantage; Headquarters United States Air Force: Washington, DC, USA, 2013. [Google Scholar]
- Dempsey, M.E. Intelligence, Surveillance, and Reconnaissance Joint Force 2020 White Paper; U.S. Army: Washington, DC, USA, 2014. [Google Scholar]
- Seffers, G. Joint Aerial Layer Network Vision Moves Toward Reality. Available online: http://www.afcea.org/content/?q=node/11123 (accessed on 19 August 2015).
- Schechter, E. UAVs Could be Next Step for Electronic Warfare. Available online: http://archive.c4isrnet.com/article/20140507/C4ISRNET08/305070006/UAVs-could-next-step- electronic-warfare (accessed on 19 August 2015).
- Cevik, P.; Kocaman, I.; Akgul, A.; Akca, B. The Small and Silent Force Multiplier: A Swarm UAV—Electronic Attack. J. Intell. Robot. Syst. 2013, 70, 595–608. [Google Scholar] [CrossRef]
- Callam, A. Drone Wars: Armed Unmanned Aerial Vehicles. Int. Aff. Rev. 2010, 18, 3. [Google Scholar]
- Lockheed/Piasecki Team Tackles Cargo UAV. 2014. Available online: http://aviationweek.com/awin/lockheedpiasecki-team-tackles-cargo-uav (20 August 2015).
- Myers, M. New funds to aid coast guard in adopting a UAV. Navy Times, 25 April 2015. [Google Scholar]
- Reyes, H.; Gellerman, N.; Kaabouch, N. A Cognitive Radio System for Improving the Reliability and Security of UAS/UAV Networks. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–9.
- Ogan, R. Educating the Next Generation Engineers for Unmanned Aircraft Systems Applications and Challenges. In Proceedings of the SoutheastCon 2015, Ft. Lauderdale, FL, USA, 9–12 April 2015.
- Boskovic, J.D.; Prasanth, R.; Mehra, R.K. A Multilayer Control Architecture for Unmanned Aerial Vehicles. In Proceedings of the American Control Conference, Anchorage, AK, USA, 8–10 May 2002; pp. 1825–1830.
- Dantzig, G.; Fulkerson, R.; Johnson, S. Solution of a Large-Scale Traveling-Salesman Problem. J. Oper. Res. Soc. Am. 1954, 2, 393–410. [Google Scholar] [CrossRef]
- Garey, M.R.; Johnson, D.S. Computers and Intractability: A Guide to the Theory of NP-Completeness; Freeman: New York, NY, USA, 1985. [Google Scholar]
- Glover, F. Tabu Search: A Tutorial. Interfaces 1990, 20, 74–94. [Google Scholar] [CrossRef]
- Glover, F.; Laguna, M. Tabu Search; Kluwer Academic Publishers: Boston, MA, USA, 1997. [Google Scholar]
- Ryan, J.; Bailey, T.; Moore, J. Reactive Tabu Search in Unmanned Aerial Reconnaissance Simulations. In Proceedings of the IEEE Winter Simulation Conference, Washington, DC, USA, 13–16 December 1998.
- Wang, Z.; Liu, Q.; Tao, H.; Li, J. Multiple Task Planning Based on TS Algorithm for Multiple Heterogenous Unmanned Aerial Vehicles. In Proceedings of the IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014.
- Zhao, J.; Zhao, J. Study on Multi-UAV Task clustering and Task Planning in Cooperative Reconnaissance. In Proceedings of the International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2014.
- Dijkstra, E. A Note on Two Problems in Connexion with Graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Meng, B.; Gao, X.; Wang, Y. Multi-mission Path Re-planning for Multiple Unmanned Aerial Vehicles Based on Unexpected Events. In Proceedings of the International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2009; pp. 423–426.
- Bertuccelli, L.; Choi, H.; Cho, P.; How, J. Real-time Multi-UAV Task Assignment in Dynamic and Uncertain Environments. In Proceedings of the AIAA Guidance, Navigation and Control Conference, Chicago, IL, USA, 10–13 August 2009.
- Leary, S.; Deittert, M.; Bookless, J. Constrained UAV Mission Planning: A Comparison of Approaches. In Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2002–2009.
- Ragi, S.; Chong, E.K.P. Decentralized Guidance Control of UAVs with Explicit Optimization of Communications. J. Intell. Robot. Syst. 2014, 73, 811–822. [Google Scholar] [CrossRef]
- Cummings, M.; How, J.; Whitten, A.; Toupet, O. The Impact of Human-Automation Collaboration in Decentralized Multiple Unmanned Vehicle Control. Proc. IEEE 2012, 100, 660–671. [Google Scholar] [CrossRef]
- Kopeikin, A.; Ponda, S.; Johnson, L.; How, J. Multi-UAV Network Control Through Dynamic Task Allocation: Ensuring Data-Rate and Bit-Error-Rate Support. In Proceedings of the IEEE Globecom Workshop, Anaheim, CA, USA, 3–7 December 2012; pp. 1579–1584.
- Tong, H.; Wen, W.; Chang, H.; Yong, X. Path Planning of UAV Based on Voronoi Diagram and DPSO. In Proceedings of the International Workshop on Information and Electronics Engineering (IWIEE), Harbin, China, 10–11 March 2012; pp. 4198–4203.
- Mattingley, J.; Wang, Y.; Boyd, S. Receding Horizon Control. Control Syst. IEEE 2012, 31, 52–65. [Google Scholar] [CrossRef]
- Kuwata, Y.; Richards, A.; Schouwenaars, T.; How, J. Decentralized Robust Receding Horizon Control for Multi-vehicle Guidance. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006.
- Kuwata, Y.; How, J. Robust Cooperative Decentralized Trajectory Optimization using Receding Horizon MILP. In Proceedings of the American Control Conference, New York, NY, USA, 11–13 July 2007.
- Xiao, X.; Dong, Z.; Wu, J.; Duan, H. A Cooperative Approach to Multiple UAVs Searching for Moving Targets Based on a Hybrid of Virtual Force and Receding Horizon. In Proceedings of the IEEE 10th International Conference on Industrial Informatics, Beijing, China, 25–27 July 2012; pp. 1228–1233.
- Peng, H.; Su, F.; Bu, Y.; Zhang, G.; Shen, L. Cooperative Area Search for Multiple UAVs based on RRT and Decentralized Receding Horizon Optimization. In Proceedings of the 7th Asian Control Conference, Hong Kong, China, 27–29 August 2009.
- Schouwenaars, T.; How, J.; Feron, E. Decentralized Cooperative Trajectory Planning of Multiple Aircraft with Hard Safety Guarantees. In Proceedings of the AIAA Guidance, Navigation and Control Conference, Providence, RI, USA, 16–19 August 2004.
- Miller, S.; Harris, Z.; Chong, E.K.P. A POMDP Framework for Coordinated Guidance of Autonomous UAVs for Multitarget Tracking. EURASIP J. Adv. Signal Process. 2009, 2009, 1–17. [Google Scholar] [CrossRef]
- Ragi, S.; Tan, C.; Chong, E.K.P. Feasibility Study of POMDP in Autonomous Amphibious Vehicle Guidance. In Proceedings of the IFAC Intelligent Autonomous Vehicles Symposium, Gold Coast, Australia, 26–28 June 2013.
- Ragi, S.; Chong, E.K.P. UAV Path Planning in a Dynamic Environment via Partially Observable Markov Decision Process. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2397–2412. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the IEEE International Conference on Neural Networks, Piscataway, NJ, USA, 27 November–1 December 1995; pp. 1942–1948.
- Wang, G.; Li, Q.; Guo, L. Multiple UAVs Routes Planning Based on Particle Swarm Optimization Algorithm. In Proceedings of the 2nd International Symposium on Information Engineering and Electronic Commerce (IEEC), Ternopil, Ukraine, 23–25 July 2010.
- Kenefic, R. Finding Good Dubins Tours for UAVs Using Particle Swarm Optimization. J. Aerosp. Comput. Inf. Commun. 2008, 5, 47–56. [Google Scholar] [CrossRef]
- Zhao, J.; Zhao, J. Target Distributing of Multi-UAVs Cooperative Attack and Defend Based on DPSO Algorithm. In Proceedings of the Sixth International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2014; pp. 396–400.
- Alejo, D.; Cobano, A.; Heredia, G.; Ollero, A. Collision-free Trajectory Planning Based on Maneuver Selection-Particle Swarm Optimization. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Roberge, V.; Tarbouchi, M.; Labonte, G. Comparison of Parallel Genetic Algorithm and Particle Swarm Optimization for Real-Time UAV Path Planning. IEEE Trans. Ind. Inform. 2013, 9, 132–141. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Flyable Path Planning for a Multi-UAV System with Genetic Algorithms and Bezier Curves. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 41–48.
- Sahingoz, O.K. Generation of Bezier Curve-Based Flyable Trajectories for Multi-UAV Systems with Parallel Genetic Algorithm. J. Intell. Robot. Syst. Theory Appl. 2014, 74, 499–511. [Google Scholar] [CrossRef]
- Cekmez, U.; Ozsiginan, M.; Sahingoz, O.K. Adapting the GA Approach to Solve Traveling Salesman Problems on CUDA Architecture. In Proceedings of the IEEE International Symposium on Computational Intelligence and Informatics (CINTI 2013), Budapest, Hungary, 19–21 November 2013; pp. 423–428.
- Cekmez, U.; Ozsiginan, M.; Sahingoz, O.K. A UAV Path Planning with Parallel ACO Algorithm on CUDA Platform. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 347–354.
- Cheng, Z.; Sun, Y.; Liu, Y. Path Planning Based on Immune Genetic Algorithm for UAV. In Proceedings of the International Conference on Electric Information and Control Engineering (ICEICE), Wuhan, China, 15–17 April 2011; pp. 590–593.
- Price, I.; Lamont, G. GA Directed Self-Organized Search and Attack UAV Swarms. In Proceedings of the Winter Simulation Conference, Monterey, CA, USA, 3–6 December 2006; pp. 1307–1315.
- Pehlivanoglu, Y. A New Vibrational Genetic Algorithm Enhanced with a Voronoi Diagram for Path Planning of Autonomous UAV. Aerosp. Sci. Technol. 2012, 16, 47–55. [Google Scholar] [CrossRef]
- Sonmez, A.; Kocyigit, E.; Kugu, E. Optimal Path Planning for UAVs Using Genetic Algorithm. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Geng, L.; Zhang, Y.F.; Wang, J.J.; Fuh, J.Y.H.; Teo, S.H. Cooperative Task Planning for Multiple Autonomous UAVs with Graph Representation and Genetic Algorithm. In Proceedings of the 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013.
- Kirkpatrick, S.; Gelett, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 621–630. [Google Scholar] [CrossRef] [PubMed]
- Cerny, V. A Thermodynamic Approach to the Traveling Salesman Problem: An Efficient Simulation. J. Optim. Theory Appl. 1985, 45, 41–51. [Google Scholar] [CrossRef]
- Turker, T.; Sahingoz, O.K.; Yilmaz, G. 2D Path Planning for UAVs in Radar Threatening Environment using Simulated Annealing Algorithm. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Doringo, M. Optimization, Learning and Natural Algorithms. Ph.D. Thesis, Politecnico di Milano, Milan, Italy, 1992. [Google Scholar]
- Fallahi, K.; Leung, H.; Chandana, S. An Integrted ACO-AHP Approach for Resource Management Optimization. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, San Antonio, TX, USA, 11–14 October 2009.
- Duan, H.; Zhang, X.; Wu, J.; Ma, G. Max-Min Adaptive Ant Colony Optimization Approach to Multi-UAVs Coordinated Trajectory Replanning in Dynamic and Uncertain Envirionments. J. Bionic Eng. 2009, 6, 161–173. [Google Scholar] [CrossRef]
- Qu, Y.; Zhang, Y.; Zhang, Y. A UAV Solution of Regional Surveillance Based on Pheromones and Artificial Potential Field Theory. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Zhang, Y.; Xiao, Y. A Patrolling Scheme in Wireless Sensor and Robot Networks. In Proceedings of the IEEE Conference on Computer Communications Workshops, Shanghai, China, 10–15 April 2011; pp. 513–518.
- Zhang, Y.; Xiao, Y. Digital Pheromone Based Patrolling Algorithm in Wireless Sensor and Actuator Networks. In Proceedings of the IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 11–14 January 2013; pp. 496–501.
- Shang, K.; Karungaru, S.; Feng, Z.; Ke, L.; Terada, K. A GA-ACO Hybrid Algorithm for the Multi-UAV Mission Planning Problem. In Proceedings of the Technologies (ISCIInternational Symposium on Communications and Information T), Incheon, Korea, 24–26 September 2014; pp. 243–248.
- Krishnamoorthy, K.; Casbeer, D.; Pachter, M. Minimum Time UAV Pursuit of a Moving Ground Target using Partial Information. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Krishnamoorthy, K.; Casbeer, D.; Chandler, P.; Pachter, M.; Darbha, S. UAV Search & Capture of a Moving Ground Target under Delayed Information. In Proceedings of the IEEE Conference on Decision and Control, Mauai, Hawaii, USA, 10–13 December 2012.
- Rasmussen, S.; Kingston, D. Development and Flight Test of an Area Monitoring System Using Unmanned Aerial Vehicles and Unattended Ground Sensors. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Moon, S.; Yang, K.; Gan, S.; Shim, D. Decentralized Information-theoretic Task Assignment for Searching and Tracking of Moving Targets. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Sun, A.; Liu, H. Cooperative UAV Search for Moving Targets Using a Modified Diffusion Uncertainty Model. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009.
- Frew, E.; Lawrence, D.; Morris, S. Coordinated Standoff Tracking of Moving Targets Using Lyapunov Guidance Vector Fields. J. Guid. Control Dyn. 2008, 31, 290–306. [Google Scholar] [CrossRef]
- Summers, T.; Akella, M. Coordinated Standoff Tracking of Moving Targets: Control Laws and Information Architectures. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008.
- Summers, T.; Akella, M.; Mears, M. Coordinated Standoff Tracking of Moving Targets: Control Lawas and Information Architectures. J. Guid. Control Dyn. 2009, 32, 56–69. [Google Scholar] [CrossRef]
- Geyer, C. Active Target Search from UAVs in Urban Environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008.
- Bertuccelli, L.; How, J. UAV Search for Dynamic Targets with Uncertain Motion Models. In Proceedings of the IEEE Conference on Decision & Control, San Diego, CA, USA, 13–15 December 2006.
- Ragi, S.; Chong, E.K.P. UAV Guidance Algorithms via Partially Observable Markov Decision Processes. In Handbook of Unmanned Aerial Vehicles; Valvanis, K., Vachtsevanos, G., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 1775–1810. [Google Scholar]
- Bertuccelli, L.F.; How, J.P. Robust UAV Search for Environments with Imprecise Probability Maps. In Proceedings of the IEEE Conference on Decision and Control, and the European Control Conference, Seville, Spain, 12–15 December 2005.
- Song, S.; Rodriguez, A.; Teodorescu, M. Trajectory Planning for Autonomous Nonholonomic Vehicles for Optimal Monitoring of Spatial Phenomena. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Lee, S.; Morrison, J. Decision Support Scheduling for Maritime Search and Rescue Planning with a system of UAVs and Fuel Service Stations. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Zhang, C.; Pei, H. Oil Spills Boundary Tracking Using Universal Kriging and Model Predictive Control by UAV. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014.
- Hu, J.; Xie, L.; Lum, K.; Xu, J. Multiagent Information Fusion and Cooperative Control in Target Search. IEEE Trans. Control Syst. Technol. 2013, 21, 1223–1235. [Google Scholar] [CrossRef]
- Hirsch, M.; Schroeder, D. On the Decentralized Cooperative Control of Multiple Autonomous Vehicles. In Handbook of Unmanned Aerial Vehicles; Valvanis, K., Vachtsevanos, G., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 1775–1810. [Google Scholar]
- Hirsch, M.; Schroeder, D. Dynamic Decentralized Cooperative Control of Multiple Autonomous Vehicles with Multiple Tasks for Urban Operations. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012.
- Wu, P.; Campbell, D.; Merz, T. On-Board Multi-Objective Mission Planning for Unmanned Aerial Vehicles. In Proceedings of the IEEE Aerospace Conference, Piscataway, NJ, USA, 7–14 March 2009; pp. 1–10.
- Ilaya, O. Multi Objective Decentralized Model Predictive Control for Cooperative Multi-UAV Systems. In Proceedings of the AIAA Guidance, Navigation and Control Conference, Hilton Head, SC, USA, 20–23 August 2007.
- Ilaya, O.; Bil, C.; Evans, M. Distributed and Cooperative Decision Making for Multi-UAV Systems with Applicaiton to Collaborative Electronic Warfare. In Proceedings of the AIAA Aviation Technology, Integration and Operations Conference, Belfast, Northern Ireland, 18–20 September 2007.
- Peng, X.; Xu, D.; Yan, W. Intelligent Flight for UAV via Integration of Dynamic MOEA, Bayesian Network and Fuzzy Logic. In Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, Fl, USA, 12–15 December 2011.
- Chapman, A.; Mesbahi, M. UAV Swarms: Models and Effective Interfaces. In Handbook of Unmanned Aerial Vehicles; Valvanis, K., Vachtsevanos, G., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 1775–1810. [Google Scholar]
- Barca, J.; Sekercioglu, Y. Swarm robotics reviewed. Robotica 2013, 31, 345–359. [Google Scholar] [CrossRef]
- Alighanbari, M.; How, J. An Unbiased Kalman Consensus Algorithm. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006.
- Brunet, L.; Choi, H.; How, J. Consensus-Based Auction Approaches for Decentralized Task Assignment. In Proceedings of the AIAA Guidance Navigation and Control Conference, Honolulu, HI, USA, 18–21 August 2008.
- Choi, H.; Brunet, L.; How, J. Consensus-Based Decentralized Auctions for Robust Task Allocation. IEEE Trans. Robot. 2009, 25, 912–926. [Google Scholar] [CrossRef]
- Choi, H.; Whitten, A.; How, J. Decentralized Task Allocation for Heterogeneous Teams with Cooperation Constraints. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010.
- Ren, W.; Beard, R.; Atkins, E. A Survey of Consensus Problems in Multi-agent Coordination. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005.
- Ren, W.; Beard, R. Distributed Consensus in Multi-vehicle Cooperative Control; Springer-Verlag: London, UK, 2008. [Google Scholar]
- Ren, W.; Beard, R. Consensus Seeking in Multiagent Systems under Dynamically Changing Interaction Topologies. IEEE Trans. Autom. Control 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Sujit, P.; Kingston, D.; Beard, R. Cooperative Forest Fire Monitoring Using Multiple UAVs. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007.
- Kingston, D.; Beard, R. Decentralized Perimeter Surveillance Using a Team of UAVs. IEEE Trans. Robot. 2008, 24, 1394–1404. [Google Scholar] [CrossRef]
- Ou, W.; Zou, F.; Xu, X.; Gao, Z. Targets Assignment for Cooperative Multi-UAVs Based on Chaos Optimization Algorithm. In Proceedings of the 9th International Conference for Young Computer Scientists, Hunan, China, 18–21 November 2008.
- Zhang, B.; Mao, Z.; Liu, W.; Liu, J.; Zheng, Z. Cooperative and Geometric Learning for Path Planning of UAVs. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 18–21 May 2013.
- Clark, M.; Koutsoukos, X.; Kumar, R.; Lee, I.; Pappas, G.; Pike, L.; Porter, J.; Sokolsky, O. A Study on Run Time Assurance for Complex Cyber Physical Systems; Air Force Research Lab: Dayton, OH, USA, 2013. [Google Scholar]
- Zhang, X.; Clark, M.; Rattan, K.; Muse, J. Controller Verification in Adaptive Learning Systems Towards Trusted Autonomy. In Proceedings of the ACM/IEEE Sixth International Conference on Cyber-Physical Systems, Seattle, WA, USA, 14–16 April 2015.
- Schierman, J.; DeVore, M.; Cooper, J.; Richards, N.; Gandhi, N.; Horneman, K.; Smolka, S.; Stoller, S.; Clark, M. Run Time Assurance for Complex Autonomy. In Proceedings of the Safe and Secure Systems and Software Symposium, Dayton, OH, USA, 9–11 June 2015.
- Skoog, M. Expandable Variable-Autonomy Architecture. In NASA Fact Sheet; 2015. Available online: http://www.nasa.gov/centers/armstrong/news/FactSheets/index.html (accessed on 19 August 2015). [Google Scholar]
- Ho, N.; Koltai, K.; Masequesmay, G.; Cals, S.; Sadler, G.; Lyons, J.; Cancanindin, A.; Johnson, W.; Skoog, M. An Ethnographic-Based Model for Trust Development in Auto-GCAS. In Proceedings of the American Psychological Associate Annual Convention, Toronto, ON, Canada, 6–9 August 2015.
- Niedober, D.; Ho, N.; Koltai, K.; Masequesmay, G.; Skoog, M.; Cacanindin, A.; Johnson, W.; Lyons, J. Influence of Cultural, Organizational, and Automation Capability Factors on Human-Automation Trust: A Case Study of Auto-GCAS Engineers. In Proceedings of the International Conference on Human Computer Interaction, Crete, Greece, 22–27 June 2014.
- Koltai, K.; Ho, N.; Masequesmay, G.; Niedober, D.; Skoog, M.; Cacanindin, A.; Johnson, W.; Lyons, J. Influence of Cultural, Organizational, and Automation Capability on Human Automation Trust: A Case Study of Auto-GCAS Experimental Test Pilots. In Proceedings of the International Conference on Human Computer Interaction in Aerospace, Santa Clara, CA, USA, 30 July–1 August 2014.
- Koltai, K.; Ho, N.; Masequesmay, G.; Niedober, D.; Skoog, M.; Cacanindin, A.; Johnson, W.; Lyons, J. An Extended Case Study Methodology for Investigating Influence of Cultural, Organizational, and Automation Factors on Human-Automation Trust. In Proceedings of the ACM-CHI 2014 Conference, Toronto, ON, Canada, 26 April–1 May 2014.
- Bice, G.; Skoog, M.; Howard, J. Aircraft Ground Collision Avoidance and Autorecovery System Device. U.S. Patent 4,924,401, 8 May 1990. [Google Scholar]
- Skoog, M.; Prosser, K. Advanced Fighter Technology Integration/F-16 Automatic Ground Collision Avoidance System Evaluation; AFFTC-TR-99-28; Wright-Patterson Air Force Base: Dayton, OH, USA, 2000. [Google Scholar]
- Moore, D.; Schlappi, K. USAF F-16 Block 40/50 Test and Evaluation for the Automatic Ground Collision Avoidance System (Auto GCAS) and Pilot Activated Recovery System (PARS); 412TW-TR-13-04; Wright-Patterson Air Force Base: Dayton, OH, USA, 2013. [Google Scholar]
- Sorokowski, P. Automatic Ground Collision Avoidance System Fighter Risk Reduction Project; AFFTC-TIM-10-05; Wright-Patterson Air Force Base: Dayton, OH, USA, 2010. [Google Scholar]
- Swihart, D.E.; Barfield, A.F.; Griffin, E.M.; Lehmann, R.C.; Whitcomb, S.C.; Flynn, B.; Skoog, M.A.; Processor, K.E. Automatic Ground Collision Avoidance System design, integration, & flight test. Aerosp. Electron. Syst. Mag. 2011, 26, 4–11. [Google Scholar]
- Norris, G. Ground Collision Avoidance System “Saves” First F-16 in Syria. 5 February 2015. Available online: http://aviationweek.com/defense/ground-collision-avoidance-system-saves-first-f-16-syria (accessed on 11 October 2015).
- Sorokowski, P.; Skoog, M.; Burrows, S.; Thomas, S. Small UAV Automatic Ground Collision Avoidance System Design Considerations and Flight Test Results; NASA/TM-2015-218732; NASA: Washington, DC, USA, 2015. [Google Scholar]
- Scherer, S.; Singh, S.; Chamberlain, L.; Elgersma, M. Flying Fast and Low Among Obstacles: Methodology and Experiments. Int. J. Robot. Res. 2008, 27, 549–574. [Google Scholar] [CrossRef]
- Kobilarov, M. Cross-entropy Motion Planning. Int. J. Robot. Res. 2012, 31, 855–871. [Google Scholar] [CrossRef]
- Hrabar, S. Reactive Obstacle Avoidance for Rotorcraft UAVs. In Proceedings of the Intelligent Robots and Systems Conference, San Francisco, CA, USA, 25–30 September 2011.
- Wood, D. Collision Avoidance System and Method Utilizing Variable Surveillance Envelope. U.S. Patent 6,804,607, 12 October 2004. [Google Scholar]
- Noth, K. Modeling and Simulation of a Ground Based Sense and Avoid Architecture for Unmanned Aircraft System Operations. In Proceedings of the Integrated Communications, Navigation and Surveillance Conference, Herndon, VA, USA, 11–13 May 2011.
- Ottman, M. Army Ground Based Sense and Avoid (GBSAA): Enables Unmanned Aircraft Flight in the National Airspace. Available online: http://www.army.mil/article/80681/Army_Ground_Based_Sense_and_Avoid__GBSAA (accessed on 11 October 2015).
- Campbell, P. Challenges to using Ground Based Sense and Avoid (GBSAA) for UAS Operations. In Proceedings of the Digital Avionic Systems Conference, Williamsburg, VA, USA, 14–18 October 2012.
- Federal Aviation Administration. Automatic Dependent Surveillance-Broadcast (ADS-B). Available online: http://www.faa.gov/nextgen/programs/adsb/ (accessed on 11 October 2015).
- Lin, Y.; Saripalli, S. Sense and Avoid for Unmanned Aerial Vehicles Using ADS-B. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Liu, W.; Hwang, I. Probabilistic Aircraft Midair Conflict Resolution Using Stochastic Optimal Control. IEEE Trans. Intell. Transp. Syst. 2014, 15, 37–46. [Google Scholar] [CrossRef]
- Richards, A.; How, J. Aircraft Trajectory Planning With Collision Avoidance Using Mixed Integer Linear Programming. In Proceedings of the American Control Conference, Anchorage, AK, USA, 8–10 May 2002.
- Patel, R.; Goulart, P.; Serghides, V. Real-Time Trajectory Generation for Aircraft Avoidance Maneuvers. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009.
- Lin, Y.; Saripalli, S. Collision Avoidance for UAVs Using Reachable Sets. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Lin, Y.; Saripalli, S. Path Planning Using 3D Dubins Curve for Unmanned Aerial Vehicles. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, CA, USA, 27–30 May 2014.
- Shim, D.; Sastry, S. An Evasive Maneuvering Algorithm for UAVs in See-and-Avoid Situations. In Proceedings of the American Control Conference, New York City, NY, USA, 11–13 July 2007.
- Bareiss, D.; van den Berg, J. Reciprocal Collision Avoidance for Robots with Linear Dynamics using LQR-Obstacles. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013.
- Wolf, T.; Kochenderfer, M. Aircraft Collision Avoidance Using Monte Carlo Real-Time Belief Space Search. J. Intell. Robot. Syst. 2011, 64, 277–298. [Google Scholar] [CrossRef]
- Temizer, S.; Kochenderfer, M.; Kaelbling, L.; Lozano-Perez, T.; Kuchar, J. Collision Avoidance for Unmanned Aircraft using Markov Decsion Processes. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010.
- Bai, H.; Hsu, D.; Kochenderfer, M.; Lee, W. Unmanned Aircraft Collision Avoidance Using Continuous-State POMDPs. In Robotics: Science and Systems; MIT Press: Cambridge, MA, USA, 2012; pp. 1–8. [Google Scholar]
- Jackson, J.; Boskovic, J.; Diel, D. Sensor Fusion for Sense and Avoid for Small UAS without ADS-B. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Williamson, T.; Spencer, N. Development and Operation of the Traffic Alert and Collision Avoidance System (TCAS). Proc. IEEE 1989, 77, 1735–1744. [Google Scholar] [CrossRef]
- Wilson, M. The Use of Low-Cost Mobile Radar Systems for Small UAS Sense and Avoid. In Sense and Avoid in UAS Research and Applications; Angelov, P., Ed.; John Wiley and Sons: West Sussex, UK, 2012; pp. 295–336. [Google Scholar]
- Griffith, J.D.; Kochenderfer, M.J.; Kuchar, J.K. Electro-optical system analysis for sense and avoid. In Proceedings of the AIAA Guidance, Navigation and Control Conference, Honolulu, HI, USA, 18–21 August 2008.
- Ramasamy, S.; Gardi, A.; Liu, J.; Sabatini, R. A Laser Obstacle Detection and Avoidance System for Manned and Unmanned Aircraft Applicatins. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Angelov, P. Sense and Avoid in UAS Research and Applications; Angelov, P., Ed.; John Wiley and Sons: West Sussex, UK, 2012; pp. 295–336. [Google Scholar]
- Contarino, M. All Weather Sense and Avoid System for UASs Report. Task 3.1 - Review & Analysis of Available System Technology Options and Justification for System Selection; Technical Report; U.S. Office of Naval Research: Arlington, VA, USA, 2009. [Google Scholar]
- Stevens, M.; Coloe, B.; Atkins, E. Platform-Independent Geofencing for Low Altitude UAS Operations. In Proceedings of the 15th Aviation Technology Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015.
- Arduino Autopilot Geo-Fencing. Available online: http://plane.ardupilot.com/wiki/geofencing/ (accessed on 13 September 2015).
- Hayhurst, K.; Maddalon, J.; Neogi, N.; Verstynen, H. A Case Study for Assured Containment. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015.
- Range Commanders Council. Flight Safety System (FSS) for Unmanned Aerial Vehicle (UAV) Operation; Special Report; U.S. Army: Washington, DC, USA, 2008. [Google Scholar]
- Scheidt, D.; D’Amico, W.; Lutz, R. Safe Testing of Autonomy in Complex, Interactive Environments (TACE). ITEA J. 2014, 35, 323–331. [Google Scholar]
- Stansbury, R.; Tanis, W.; Wilson, T. A Technology Survey of Emergency Recovery and Flight Termination Systems for UAS. In Proceedings of the AIAA Infotech Aerospace Conference, Seattle, WA, USA, 6–9 April 2009.
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eaton, C.M.; Chong, E.K.P.; Maciejewski, A.A. Multiple-Scenario Unmanned Aerial System Control: A Systems Engineering Approach and Review of Existing Control Methods. Aerospace 2016, 3, 1. https://doi.org/10.3390/aerospace3010001
Eaton CM, Chong EKP, Maciejewski AA. Multiple-Scenario Unmanned Aerial System Control: A Systems Engineering Approach and Review of Existing Control Methods. Aerospace. 2016; 3(1):1. https://doi.org/10.3390/aerospace3010001
Chicago/Turabian StyleEaton, Christopher M., Edwin K. P. Chong, and Anthony A. Maciejewski. 2016. "Multiple-Scenario Unmanned Aerial System Control: A Systems Engineering Approach and Review of Existing Control Methods" Aerospace 3, no. 1: 1. https://doi.org/10.3390/aerospace3010001
APA StyleEaton, C. M., Chong, E. K. P., & Maciejewski, A. A. (2016). Multiple-Scenario Unmanned Aerial System Control: A Systems Engineering Approach and Review of Existing Control Methods. Aerospace, 3(1), 1. https://doi.org/10.3390/aerospace3010001