1. Introduction
The development and utilization of the unmanned aerial vehicle (UAV) for military and civil applications have significantly increased within the past years [
1]. Recently, a new UAV that operates as a satellite known as a pseudolite has been developed [
2,
3]. A satellite is expensive to build and requires a highly skilled engineers [
4]. Therefore, the introduction of an airborne pseudolite may serve as an alternative method for satellite-related missions.
Several studies have been conducted to establish long-endurance UAVs, which aim to improve perpetual flights. Battery-powered UAVs cannot replace satellites completely, even though significant improvements have been implemented to enhance the capabilities of battery packs. Thus, researchers are venturing into solar-powered UAVs for the opportunity of endurance enhancement.
The solar-powered UAV is a cost-efficient option for data communication and has the advantage of a cheaper manufacturing process and lesser time requirements than satellite construction. Solar-powered UAVs may also perform mission operations that offer great flexibility [
5,
6]. For instance, a solar-powered UAV is eligible for different missions, such as the payload, in which sensors or other components may be changed based on the desired mission objective. The vast technological improvement on electronic components means that the payload may also be enhanced over a certain service time to maintain its reliability. The technology used in the UAV could be improved and advanced technology may be used.
Satellite operations are high-cost, and its re-launching to a desired orbit is dangerous. By contrast, a solar-powered UAV can sustain long operation missions, has the flexibility for self-positioning within any operation, is maintainable at a certain altitude over a long period of time, and has a higher market value compared to a satellite [
4,
7]. A UAV can be launched by hand or by using a catapult, bungee, or a moving platform, and does not require any complicated launching methods [
8]. This platform can produce high-quality images and data collection because of its capability of flying at a low speed and below clouds.
A manned aircraft is another currently available pseudolite platform. This platform has some flaws compared to solar-powered UAVs, such as safety, which is a major issue because pilots are vulnerable to health risks and emotion-related issues that directly affect the performance and productivity of the flight operation [
9]. This drawback can be prevented in an unmanned operation. A solar-powered airship, apart from a plane and a helicopter, is an alternative platform capable of infinite endurance.
Airships are classified into rigid, semi-rigid, or non-rigid types [
10]. The solar-powered airship depends on lifting gas and does not require forward speed to maintain lift [
11,
12]. This airship is exposed to positioning issues influenced by several uncertainties, such as external disturbances, lack of control handling, and uncontrolled altitude. These issues will cause the airship to deviate from the planned path to complete any missions [
12]. The size of the airship may also affect its performance [
13].
A long-endurance, solar-powered UAV has broader potential applications, such as border and coastal patrol, homeland security, pipeline and power line patrol, forest fire mapping, and real-time monitoring of seismic risk areas. Boeing and Airbus manufactured available UAVs specialized for operations similar to pseudolites, including the Zephyr 7 by Boeing with a wingspan of 22.5 m and the SolarEagle from Airbus with a wingspan of 120 m [
14,
15].
Table 1 shows some globally designed UAVs. The planned solar-powered UAV has a stronger endurance than a fuel- or gas-powered UAV.
Solar Impulse 1 is the largest solar-powered UAV built, with a wingspan of 63.4 m and a maximum take-off weight of 1600 kg. The Solar Impulse 1 can only fly at a maximum endurance of 26 h because of its enormous size. By contrast, Zephyr 2010 (HAPS) is significantly smaller, with a wingspan and maximum take-off weight of 18 m and 30 kg, respectively, and can manage a higher endurance of 336 h compared to Solar Impulse 1. The comparison signifies that the size of the wingspan and the take-off weight directly affect the endurance of the UAV to fly all year round.
The ability of a solar-powered pseudolite UAV to operate perpetually and globally is highly dependent on the solar energy received around the area of interest. The SI density varies widely [
16,
17] because every city has different climate conditions; thus, the optimal sizing of solar-powered UAVs also differs because of the number of required solar cells along the wingspan to supply the required power during the flight. No specific optimization design for solar-powered UAVs suitable for continuous flying at various SI intensity environments has been reported. The current research is intended to determine suitable sizing of solar-powered UAVs that can fly continuously around the world.
2. Methodology
Several major design parameters are considered when designing a solar-powered UAV. As defined in a previous study [
16], the parameters (see
Figure 1) include aerodynamics, performance, stability and control, mass estimation, solar irradiance amount, mission profile, and electric propulsion systems [
18].
Aerodynamics analysis determines the amount of lift and drag required for the UAV to fly, which are affected by the maximum take-off weight (WTOmax), working density (ρ), flying velocity (V), Oswald efficiency (ε), wing areas (S), span (b), and aspect ratio (AR) of the wing. The lift and drag coefficients (CL and CD) can be predicted using a well-known theoretical estimation, shown in Equations (1) and (2). The wing area may also be estimated using Equation (3).
The performance of the UAV regarding power requirement helps determine the area of solar module (Asolar) that requires sufficient power supply for the UAV to maintain perpetual flight. Solar irradiance (Ir) intensity significantly affects the energy that may be harnessed by these cells. Based on the attached solar module system efficiency (effSolarSystem) on the UAV, an estimation of solar power (Psolar) can be obtained and estimated using Equation (4).
The total platform weight management, ratio of the solar module to the wing area, and solar module power are crucial factors to achieve a lightweight UAV that contributes to long flight endurance [
16,
17]. Hence, the power obtained from the solar module, which then charges the battery pack, must produce the required power,
Prequired (see Equation (5)) to sustain a level flight.
In a solar-powered UAV, the solar module will supply power to the UAV, and the excess energy will be used to charge the battery for night operations [
16]. A solar-powered UAV requires a large wing for solar module placement, which will directly increase the total weight of the UAV. Solar panel efficiency and battery density may also affect the weight and performance of the UAV. The maximum take-off weight of an electric UAV can be estimated using Equation (6), where
WStruct,
WBatt,
WSolar,
WElectric,
WCtrl,
WPay, and
WStruct are the weights of aircraft structure, battery, solar module, electric propulsion system, control, and payload, respectively.
This study is divided into two phases. Phase One simulates the suitable design specifically for a year-round flight for 12 selected cities.
Figure 2 shows that the 12 cities, namely, Ottawa (Canada), Honolulu (Hawaii), Quito (Ecuador), Tahiti (French Polynesia), Brasilia (Brazil), London (United Kingdom), Riyadh (Saudi Arabia), Tokyo (Japan), Kuala Lumpur (Malaysia), Accra (Ghana), Port Louis (Mauritius), and Suva (Fiji), cover a wide range of latitude.
Solar irradiance obtained from the sun irradiates a wide region on earth at a particular time. Some areas on the surface of the earth are not equally illuminated by the sun because of the earth-sun distance, thus the solar intensity is unequal; yet, this effect is marginal. Thus, the locations of the 12 selected cities have been widely distributed to ensure that they occupy most of the locations around the world with considerations of the latitude and longitude. A more in-depth study may be conducted for more locations around the world when detailed path and mission planning studies are completed.
An existing model from a previous study [
16] is used to estimate solar irradiance. This solar irradiance model estimates solar irradiance at a specific time of day, date, and latitude and longitude coordinates, instead of a simplified average value of solar irradiance data for a particular day in a nearby major city. The result in the estimated solar irradiance is used to predict the power produced from the UAV solar power module. Solar-powered UAV sizing for each city (AVUAV) then estimates the wingspan and maximum take-off weight (MTOW).
For Phase Two, the AVUAV design for each city is generalized to one solar-powered UAV design applicable to any city in the world in a year-round flight through the 1UAV. In this study, the daily average of solar irradiance and daylight duration of a year for 12 cities (as shown in
Table 2) are obtained to determine the size of a single solar-powered UAV capable of perpetual flight.
Thus, the simulated wingspan design and maximum take-off weight of the 1UAV are 2.03 m and 0.50571 kg, respectively. The 1UAV sizing was used as reference to obtain the percentage difference between the AVUAV and 1UAV sizing specifications. From there, the difference in dimension will be calculated in percentage value.
For both phase analyses throughout the study, the system is equipped with one battery cell and the UAV cruise velocity is assumed to be fixed at 20 m/s at 100 m altitude. The selected simulation altitude ensures that the UAV is within the permitted airspace altitude and enables flight testing activities.
Table 3 presents the other parameters defined for the simulations of AVUAV and 1UAV 3.
The control weight, battery weights, and payload have been fixed for similarities among the simulation case studies performed for each city. The MTOW was initialized similarly for all cities as 0.5 kg, as shown in
Table 3. The estimated weight values were iterated at an error of ±5% of the initialized weight, which provides an actual weight range of ±25 g for take-off weight. This weight estimation error also applies to the weight of the structure, electric propulsion, and solar module, as defined in
Table 3. The later variations of weight parameters cater to the change of requirements in the wing area because the demand for more or less solar module affects the size of the solar module.
3. Results and Discussion
The wingspan and maximum take-off weight design of the UAV for a specific location are highly dependent on the available solar irradiance and daylight duration.
Table 4 shows the sizing of the wingspan and maximum take-off ratio for a specific city. The results show that the wingspan ranges between 1.97 and 2.09 m, indicating that the UAV may be considered a small solar-powered UAV.
The lightest maximum take-off weight is suitable for a UAV to perform efficiently and maintain perpetual flight. The UAV sizing optimization for specific cities attained a weight less than or equal to 0.520 kg.
Table 4 shows the comparison of the AVUAV and 1UAV wingspans and MTOW. The results explain that the length of the UAV wingspan does not necessarily have the highest MTOW. The AVUAV of Suva, Fiji had the smallest wingspan with 1.98 m.
The London AVUAV wingspan and take-off weight had the highest percentage difference. The lightest and heaviest AVUAV take-off weights were for the cities of Port Louis and London, respectively. The 1UAV wingspan shows no difference with the AVUAV of Riyadh, whereas minimal changes were observed in other cities. The minimal percentage difference of the 1UAV design can be reliably applied to any cities in the world, compared with that of the other cities.
The modifications in wingspan and MTOW affect the performance and endurance of the flight.
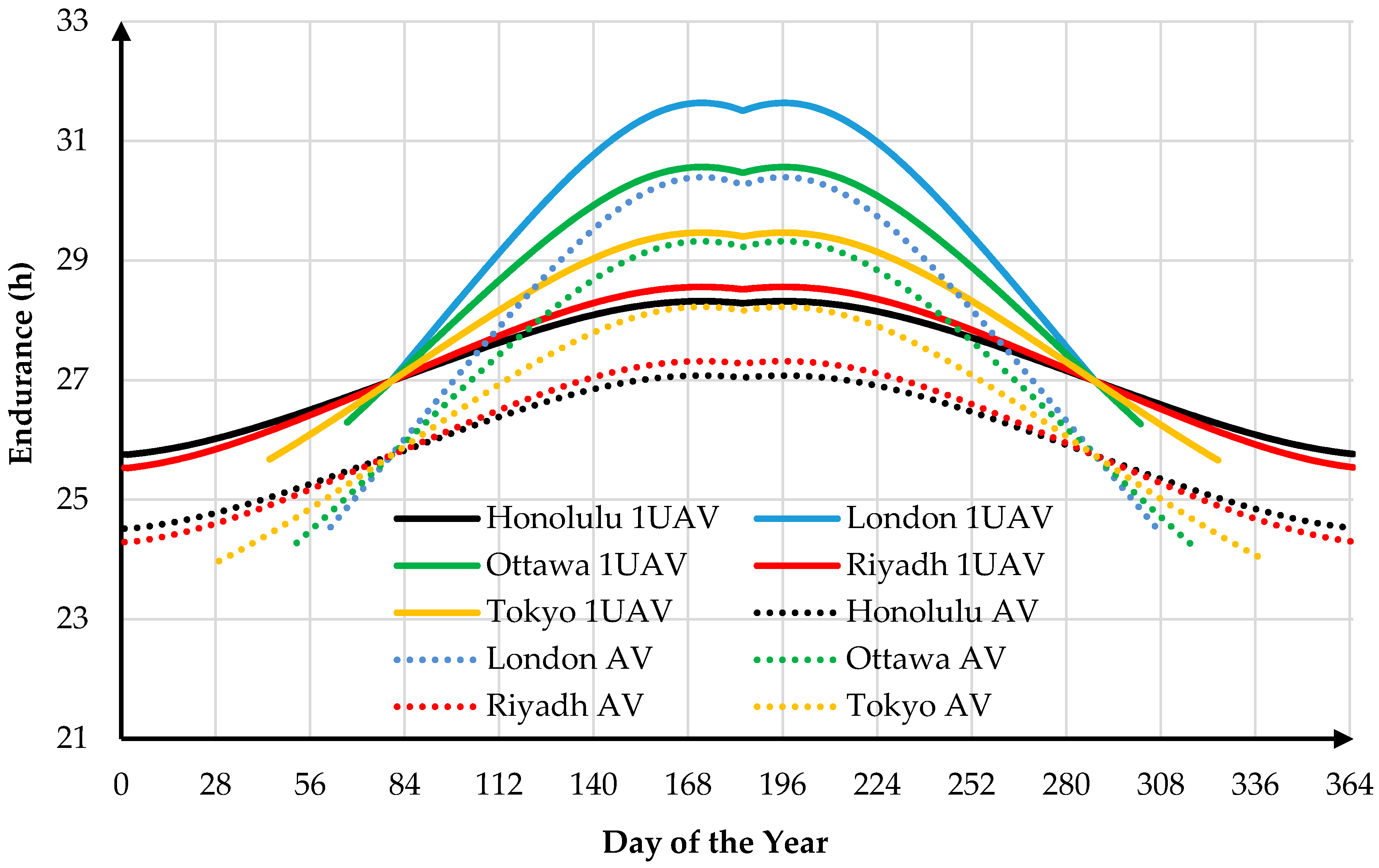
Figure 3 illustrates the endurance for each AVUAV at different cities and 1UAV.
Table 4 shows the endurance of each UAV calculated based on the wingspan and maximum take-off weight obtained from the model developed.
Endurance was estimated for each city on two different UAV sizes: one sizing based on a specific city design (AVUAV) and the other with any locations around the world (1UAV). The proposed 1UAV sustained perpetual flight for an entire year around 9 out of 12 subject cities, namely, Tahiti, Suva, Riyadh, Quito, Port Louis, Kuala Lumpur, Honolulu, Brasilia, and Accra.
UAVs in Tokyo, Ottawa, and London cannot fly perpetually throughout the year, but can fly continually for 282, 236, and 209 days, respectively, with the 1UAV general design, and 246 to 311 days with the AVUAV design. These UAVs may cover 58% to 87% of the days over the entire year. This finding can be attributed to the low solar irradiance intensity and daylight hours over the regions that have a significant effect on perpetual flight at certain months of the year.
For London, the longest perpetual flight based on the AVUAV design is on the 62nd to the 307th day, while that for the 1UAV design is on 80th to the 288th day, which occurs from March to September. For Ottawa, the optimum time is within 52 to 317 and 67 to 302 days, which is from February to October, for the AVUAV and 1UAV designs, respectively. For Tokyo, days 29 to 337 and 44 to 325, which are from early February to the end of December, for the AVUAV and 1UAV designs, are suitable for perpetual flight.
This condition is attributed to the amount of solar energy, which depends considerably on several other major factors, including seasonal change, climate change, and the amount of rainfall and temperature, that may be harnessed. During winter and autumn, the number of average daylight hours, approximately 8–9 h during winter and 10–14 h in autumn, is lower than in summer and spring. In addition, the locations of London, Ottawa, and Tokyo being in the northern hemisphere have a significant effect on daylight hours.
Figure 4 illustrates the endurance of the proposed AVUAV and 1UAV for each city.
Figure 3 shows that the AVUAV proposed for London, Ottawa, and Tokyo had the highest endurance in the middle of the year, compared with other cities. The AVUAV designs for Port Louis, Tahiti, Brasilia, and Suva encountered the lowest endurances during the middle of the year and a higher endurance during the beginning and end of the year. The AVUAV proposed for Accra, Kuala Lumpur, and Quito experienced average endurance throughout the year.
The different endurance performances of AVUAV in various cities correlate to the hemispheres of the earth. Cities in the northern hemisphere experience high endurance in the middle of the year, whereas cities in the southern hemisphere exhibit an opposite behavior. Nevertheless, all cities exceed 24 h endurance for the entire year, except for northern hemisphere cities, such as London, Ottawa, and Tokyo, which exceed the 24 h endurance threshold for only a certain period.








{kind=link}
{kind=link}
{kind=link}
{kind=link}