Mathematical Modeling of Liquid-fed Pulsed Plasma Thruster

Abstract
:1. Introduction
2. Mathematical Model
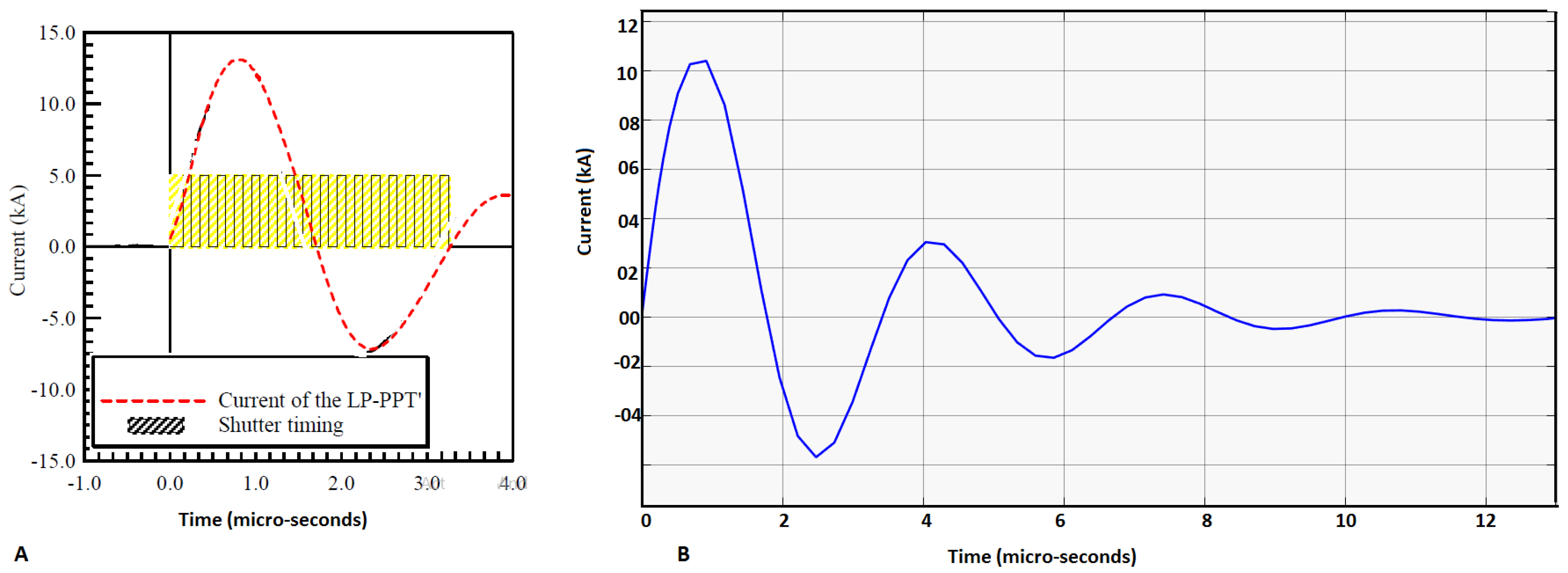
2.1. Equivalent Circuit Modeling
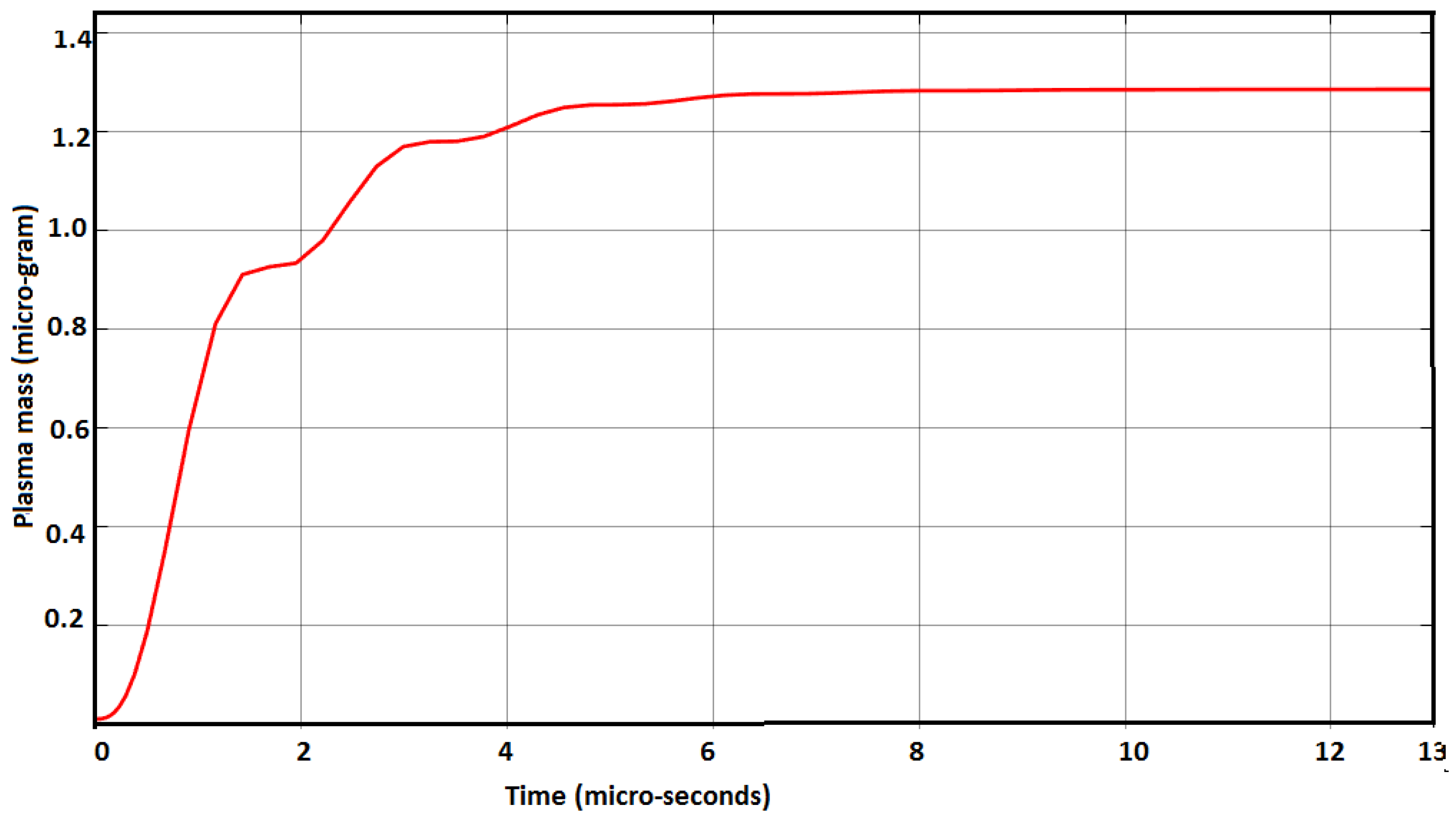
2.2. Plasma Flow and Mass Modeling
2.3. Dynamical Modeling
3. Implementation and Discussion of Mathematical Model
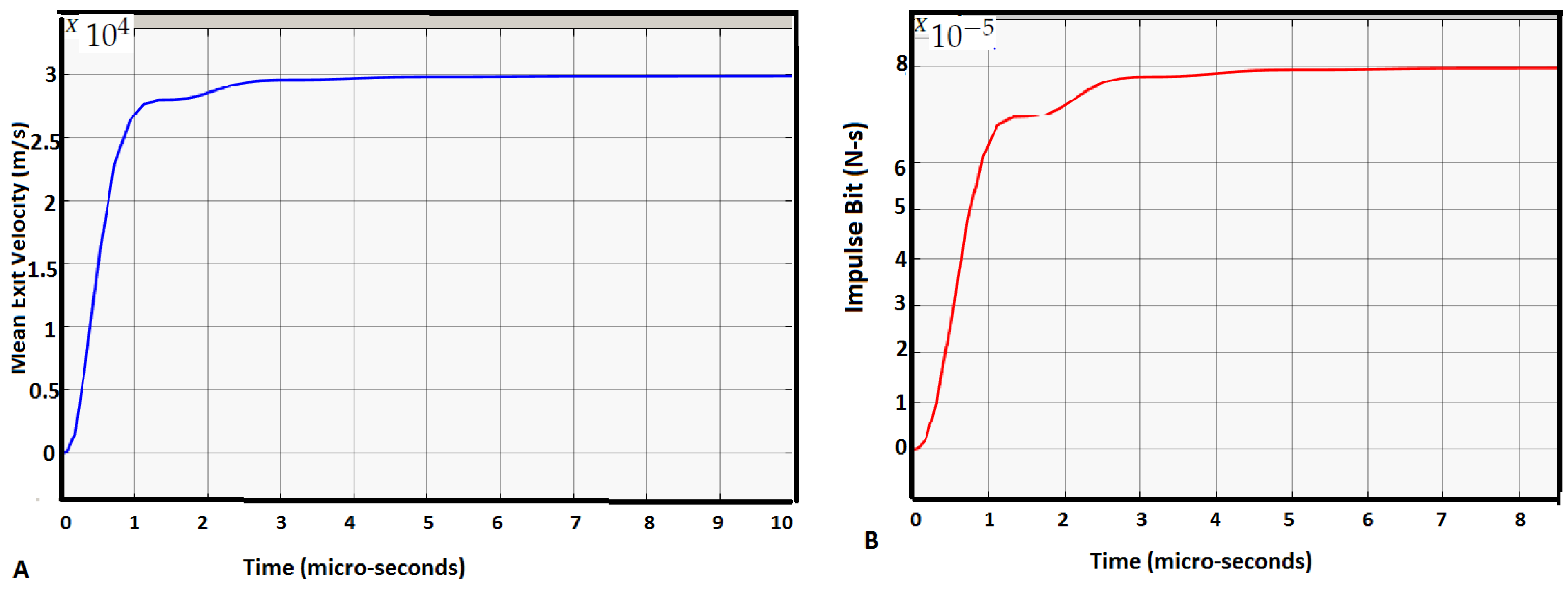
3.1. Results for LPPT-1
3.2. Results for LPPT-2
4. Optimization Suggestions for Liquid-fed PPTs
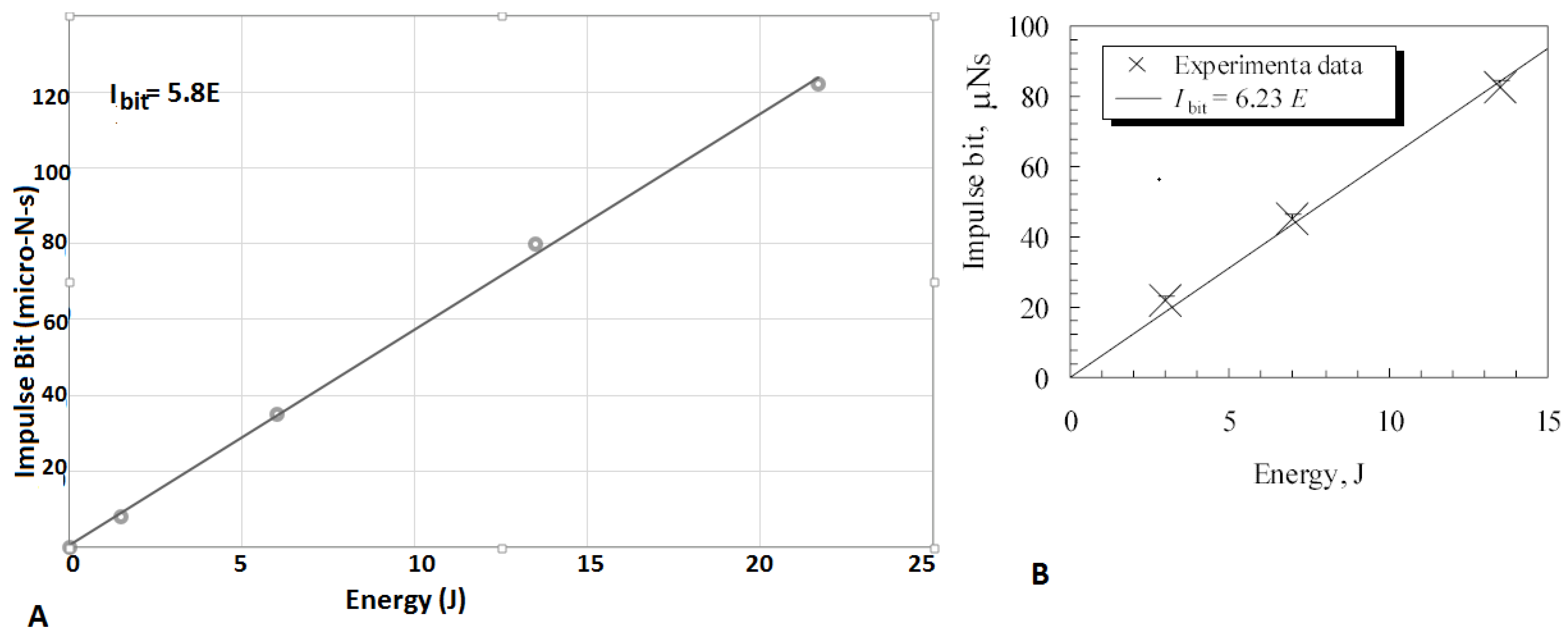
4.1. Discharge Energy Variation
4.2. Variation in Supplied Ablation Mass
4.3. Circuit Parameters
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Burton, R.; Turchi, P. Pulsed plasma thruster. J. Propuls. Power 1998, 14, 716–735. [Google Scholar] [CrossRef]
- Jahn, R.G. Physics of Electric Propulsion; Courier Corporation: North Chelmsford, MA, USA, 2006. [Google Scholar]
- Kakami, A.; Koizumi, H.; Komurasaki, K.; Arakawa, Y. Design and performance of liquid propellant pulsed plasma thruster. Vacuum 2004, 73, 419–425. [Google Scholar] [CrossRef]
- Scharlemann, C.A. Investigation of Thrust Mechanisms in a Water Fed Pulsed Plasma Thruster. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2003. [Google Scholar]
- Thomassen, K.; Solbesj, A. Analysis of solid teflon pulsed plasma thruster. Development 1969, 6, 565–569. [Google Scholar]
- Spanjers, G.G.; McFall, K.A.; Gulczinski, F.S.; Spores, R.A. Investigation of propellant inefficiencies in a pulsed plasma thruster. AIAA Pap. 1996, 96, 2723. [Google Scholar]
- Spanjers, G.G.; Lotspeich, J.S.; McFall, K.A.; Spores, R.A. Propellant losses because of particulate emission in a pulsed plasma thruster. J. Propuls. Power 1998, 14, 554–559. [Google Scholar] [CrossRef]
- Vondra, R.; Thomassen, K.; Solbes, A. A pulsed electric thruster for satellite control. Proc. IEEE 1971, 59, 271–277. [Google Scholar] [CrossRef]
- Popov, G.; Orlov, M.; Antropov, N.; Gomilka, L.; Diakonov, G.; Krivonosov, I.; Popov, G.; Orlov, M.; Antropov, N.; Gomilka, L.; et al. Parameters of plasmoids injected by PPT. In Proceedings of the 33rd Joint Propulsion Conference and Exhibit, Seattle, WA, USA, 6–9 July 1997; p. 2921. [Google Scholar]
- Myers, R.M.; Arrington, L.A.; Pencil, E.J.; Carter, J.; Heminger, J.; Gatsonis, N. Pulsed plasma thruster contamination. In Proceedings of the 32nd Joint Propulsion Conference and Exhibit, Lake Buena Vista, FL, USA, 1–3 July 1996. [Google Scholar]
- Henrikson, E.M.; Mikellides, P.G. Modeling of ablation-fed pulsed plasma thruster operation using a new approach to the ablation process. In Proceedings of the 44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Hartford, CT, USA, 21–23 July 2008; Volume 4645. [Google Scholar]
- Koizumi, H.; Kakami, A.; Furuta, Y.; Komurasaki, K.; Arakawa, Y. Liquid propellant pulsed plasma thruster. In Proceedings of the 28th International Electric Propulsion Conference, Toulouse, France, 17–21 March 2003. Number 2003-87. [Google Scholar]
- Laperriere, D.D.; Gatsonis, N.A.; Demetriou, M.A. Electromechanical modeling of applied field micro pulsed plasma thrusters. In Proceedings of the 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference Exhibit, Tucson, AZ, USA, 10–13 July 2005. [Google Scholar]
- Mikellides, Y.G. Theoretical Modeling and Optimization of Ablation-Fed Pulsed Plasma Thrusters. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 1999. [Google Scholar]
- Scharlemann, C.; Corey, R.; Mikellides, I.; Turchi, P.; Mikellides, P. Pulsed plasma thruster variations for improved mission capabilities. In Proceedings of the 35th Intersociety Energy Conversion Engineering Conference and Exhibit 2000, Las Vegas, NV, USA, 24–28 July 2000. [Google Scholar]
- Nada, T. One-dimensional model of a pulsed plasma thruster. Aeronaut. J. 2013, 117, 929–942. [Google Scholar] [CrossRef]
- Yang, L.; Liu, X.Y.; Wu, Z.W.; Wang, N.F. Analysis of Teflon Pulsed Plasma Thrusters Using a Modified Slug Parallel Plate Model. In Proceedings of the 47th AIAA/ASME/SAE/ASEE, Joint Propulsion Conference and Exhibit, San Diego, CA, USA, 2011; Volume 6077. [Google Scholar]
- Turchi, P.; Mikellides, I.; Mikellides, P.; Schmahl, C. Theoretical investigation of pulsed plasma thrusters. AIAA Pap. 1998, 98, 3807. [Google Scholar]
- Huang, T.; Wu, Z.; Liu, X.; Xie, K.; Wang, N.; Cheng, Y. Modeling of gas ionization and plasma flow in ablative pulsed plasma thrusters. Acta Astronaut. 2016, 129, 309–315. [Google Scholar] [CrossRef]
- Keidar, M.; Boyd, I.D.; Beilis, I.I. On the model of Teflon ablation in an ablation-controlled discharge. J. Phys. D Appl. Phys. 2001, 34, 1675. [Google Scholar] [CrossRef]
- Boyd, I.D.; Keidar, M.; McKeon, W. Modeling of a pulsed plasma thruster from plasma generation to plume far field. J. Spacecr. Rocket. 2000, 37, 399–407. [Google Scholar] [CrossRef]
- Wang, S.Y.; Liu, X.Y.; Yang, L.; Wu, Z.W.; Cheng, Y.; Wang, N.F. Numerical Simulation of a Water Propellant Pulsed Plasma Thruster. In Proceedings of the 48th AIAA/ASME/SAE/ASEE, Joint Propulsion Conference and Exhibit, Atlanta, GA, USA, 30 July–1 August 2012. [Google Scholar]
- Turchi, P.; Mikellides, I.; Mikellides, P.; Kamhawi, H. Optimization of pulsed plasma thrusters for microsatellite propulsion. In Proceedings of the 35th Joint Propulsion Conference and Exhibit, Los Angeles, CA, USA, 20–24 June 1999; American Institute of Aeronautics and Astronautics Inc. (AIAA): Reston, VA, USA, 1999. [Google Scholar]
- Haynes, W.M. CRC Handbook of Chemistry and Physics; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Koizumi, H.; Noji, R.; Komurasaki, K.; Arakawa, Y. Plasma acceleration processes in an ablative pulsed plasma thruster. Phys. Plasmas 2007, 14, 033506. [Google Scholar] [CrossRef]
- Koizumi, H.; Noji, R.; Komurasaki, K.; Arakawa, Y. Study on plasma acceleration in an ablative pulsed plasma thruster. In Proceedings of the 43rd AIAA/ASME/SAE/ASEE, Joint Propulsion Conference and Exhibit, Cincinnati, OH, USA, 8–11 July 2007. [Google Scholar]
- Koizumi, H.; Noji, R.; Komurasaki, K.; Arakawa, Y. Plasma Flow Behaviors and Their Effects on the Performance of Pulsed Plasma Thrusters. In Proceedings of the 30th International Electric Propulsion Conference, Florence, Italy, 17–20 September 2007; pp. 17–20. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Mass (Amu) | 1st Ionization Energy (eV) | 2nd Ionization Energy (eV) | Heat of Vaporisation (J/Kg) | Heat Capacity (J/KgK) |
|---|---|---|---|---|---|
| Water | 18.02 | 40.8 | 75.9 | 4179 | |
| Teflon | 100 | 92.2 | 280.9 | 1250 |
| Operation Parameter | Value |
|---|---|
| 0.88 | |
| Capacitor (C) | 3 F |
| Discharge voltage () | 3000 V |
| Total mass supplied per discharge () | 2.8 g |
| Total discharge resistance () | 82 m |
| Total inductance () | 84 nH |
| Parameter | Simulation Result | Experimental Result |
|---|---|---|
| Discharge Voltage (V) | 3000 | 3000 |
| Capacitor (F) | 3 | 3 |
| Mean exhaust velocity (Km/s) | ||
| Charged mass exit velocity (Km/s) | 49 | − |
| Charged mass shot (g) | − | |
| Neutral mass shot (g) | − | |
| Impulse bit (N-s) | ||
| Specific Impulse (s) | 2800 | 3400 |
| Discharge Energy (J) | Charged Mass Shot (g) | Mean Exit Velocity (Km/s) | Impulse Bit (N-s) | Specific Impulse (s) |
|---|---|---|---|---|
| 1.5 | 3 | 8 | 306 | |
| 6 | 12 | 35 | 1224 | |
| 13.5 | 2800 | |||
| 21.6 | 41 | 120 | 4183 |
| Supplied Mass (g) | (N-s) | Exit Velocity (Km/s) | (s) |
|---|---|---|---|
| 2.0 | 78 | 39 | 3974 |
| 2.8 | 78.2 | 27.2 | 2800 |
| 6.8 | 82 | 12 | 1224 |
| 9.0 | 83 | 8.5 | 868 |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Misra, K. Mathematical Modeling of Liquid-fed Pulsed Plasma Thruster. Aerospace 2018, 5, 13. https://doi.org/10.3390/aerospace5010013
Misra K. Mathematical Modeling of Liquid-fed Pulsed Plasma Thruster. Aerospace. 2018; 5(1):13. https://doi.org/10.3390/aerospace5010013
Chicago/Turabian StyleMisra, Kaartikey. 2018. "Mathematical Modeling of Liquid-fed Pulsed Plasma Thruster" Aerospace 5, no. 1: 13. https://doi.org/10.3390/aerospace5010013
APA StyleMisra, K. (2018). Mathematical Modeling of Liquid-fed Pulsed Plasma Thruster. Aerospace, 5(1), 13. https://doi.org/10.3390/aerospace5010013