1. Introduction
Four new methods of analytical calculation of rocket trajectories are presented. The analytical methods have at least three advantages. First, the equations show explicitly the influence on the rocket trajectory of all parameters in the model. Second, the analytical solutions can be calculated with unlimited accuracy, within the domain of validity of the model. Thirdly, in the case of the present models, the numerical computation of analytical results can be performed in a few seconds on an ordinary PC, and thus computational cost is almost negligible. The numerical methods are irreplaceable for more complex models with higher computational cost and the interpretation of results is not always clear. Thus, analytical and numerical methods are complementary, with the former providing “exact” test cases for, and helping the interpretation, of the latter. Analytical and numerical methods have common features; for example, they can be extended from a single stage to a multi-stage rocket by taking the final conditions of the preceding stage as the initial conditions for the next stage. The numerical methods that dominate the research literature on rocket trajectories account for up to thirteen effects listed below in the next paragraph. The analytical methods that appear mostly in textbooks include three or four effects. The models in the present paper account for seven effects as indicated in
Table 1 and thus help to bridge the gap between the textbooks and research literature.
When considering the trajectory of rockets in the atmosphere, there are at least thirteen effects which may be of interest: (i) the variation of rocket mass with time, due to propellant consumption, which depends on the throttle schedule, and is most important if the propellant fraction of initial mass is large (it can be up to 90%); (ii) the angle of the thrust with the rocket axis, which may be zero, small or non-negligible, in particular in the case of thrust vectoring, when it can vary with time; (iii) the variation of thrust over time, not only due to throttling, but also due to variation of gas expansion characteristics in the exhaust nozzle, as external pressure decreases with altitude; (iv) the aerodynamic drag, that can significantly reduce acceleration and speed in the atmosphere at lower altitudes; (v) the aerodynamic lift, which is most significant for winged transatmospheric vehicles, and can generate significant forces normal to the flight path; (vi) the angle-of-attack, which by tilting the aerodynamic axes relative to the flight path, causes the lift and drag to have both longitudinal and normal force components; (vii) the dependence of aerodynamic forces, viz. lift and drag (and also side force), on velocity, which is nonlinear, viz. quadratic, in the simplest subsonic approximation; (viii) the dependence of aerodynamic forces on atmospheric mass density which varies significantly with altitude; (ix) the effect of wind that varies with geographical location and time of day; (x) non-uniform gravity, if the altitude range of flight is not small compared to the Earth radius; (xi) the Coriolis force which can cause deviation from plane trajectories for large velocities; (xii) the effect of the centrifugal force which is significant for large distance and angular velocity relative to the center of the Earth; and (xiii) the discarded mass at each stage of a multi-stage rocket, leading to a succession of flight phases, each taking as initial conditions the final conditions of the preceding, with the mass reduced by that of the discarded stage.
Of the preceding thirteen effects, for atmospheric flight over an altitude range much smaller than the radius of the Earth
, it is usual to omit (x, xi, xii), that is take uniform gravity and neglect centrifugal and Coriolis forces. The effect (xiii) of multiple rocket stages reduces to a sequence of one-stage problems, which poses new challenges mainly for trajectory optimization. The remaining effects (i) to (ix) are taken into account in the present calculation of rocket trajectories, requiring for definiteness that some assumptions be made: (i) the propellant flow rate c is assumed to be constant, so that the rocket mass decreases linearly with time from the initial
to the residual
mass; (ii) the thrust is assumed to make a constant angle with the rocket axis, usually small; (iii) the variation of thrust with external pressure is neglected, so it is taken as constant; (iv–vi) lift (iv) and drag (v) are considered, assuming (vi) a constant angle of attack relative to the flight path; (vii) the aerodynamic forces, viz. lift and drag, are assumed to be proportional to the square of the rocket velocity and to the atmospheric mass density; (viii) the mass density is assumed to decay exponentially with altitude, corresponding to an isothermal atmospheric layer. The effect of wind speed (ix) can be included in the aerodynamic forces. The ensemble of ten effects included in the analytic models of rocket trajectories presented in this paper is compared in
Table 1 with the three or four effects considered in the literature [
1,
2,
3,
4,
5], mostly consisting of textbooks.
The set of assumptions made in the present paper for the analytic calculation of rocket trajectories is far less restrictive than those available in the preceding literature. For example, the standard textbook solutions concern only the effect of mass variation due to propellant consumption, and do not take into account the dependence of the aerodynamic forces on airspeed and altitude. These and other effects can be readily included in numerical methods for engineering purposes. The analytical methods are complementary in that they can provide more insight into the effects of the various rocket, aerodynamic, and atmospheric parameters on the trajectory. Thus, this paper reduces the large gap between the numerical methods and the available analytical solutions whose domain of application is currently much more restricted. The more general analytical methods can also be used in hybrid analytical-numerical approaches, using analytical solutions in a smaller number of atmospheric layers than a purely numerical approach. The four novel analytical methods to calculate rocket trajectories use series expansions in terms of (I) rocket mass, (II) propellant mass, (III) time, or (IV) altitude, with details provided next.
The trajectories of rockets in the atmosphere are specified by a set of ordinary differential equations with time as the independent variable, coupling the path coordinates (or angles) and their first and second-order derivatives, viz. velocities and accelerations, translational for coordinates and angular for angles. The coupled system of ordinary differential equations for the trajectories is: (i) nonlinear if the aerodynamic forces are included because they are quadratic functions of the velocity, in the simplest case; (ii) have coefficients depending on time if propellant consumption is taken into account; and (iii) have coefficients depending on position if the atmospheric mass density in the aerodynamic forces is taken as a function of altitude. Thus, under simple but realistic conditions, the trajectories of rockets are specified by coupled nonlinear ordinary differential equations, with variable coefficients depending on position and time; this renders analytical solutions difficult and requires some care in numerical algorithms, in order to avoid singularities and ensure convergence. A possibly effective approach is a semi-analytical method, using simple analytical solutions as inputs to more complex numerical algorithms.
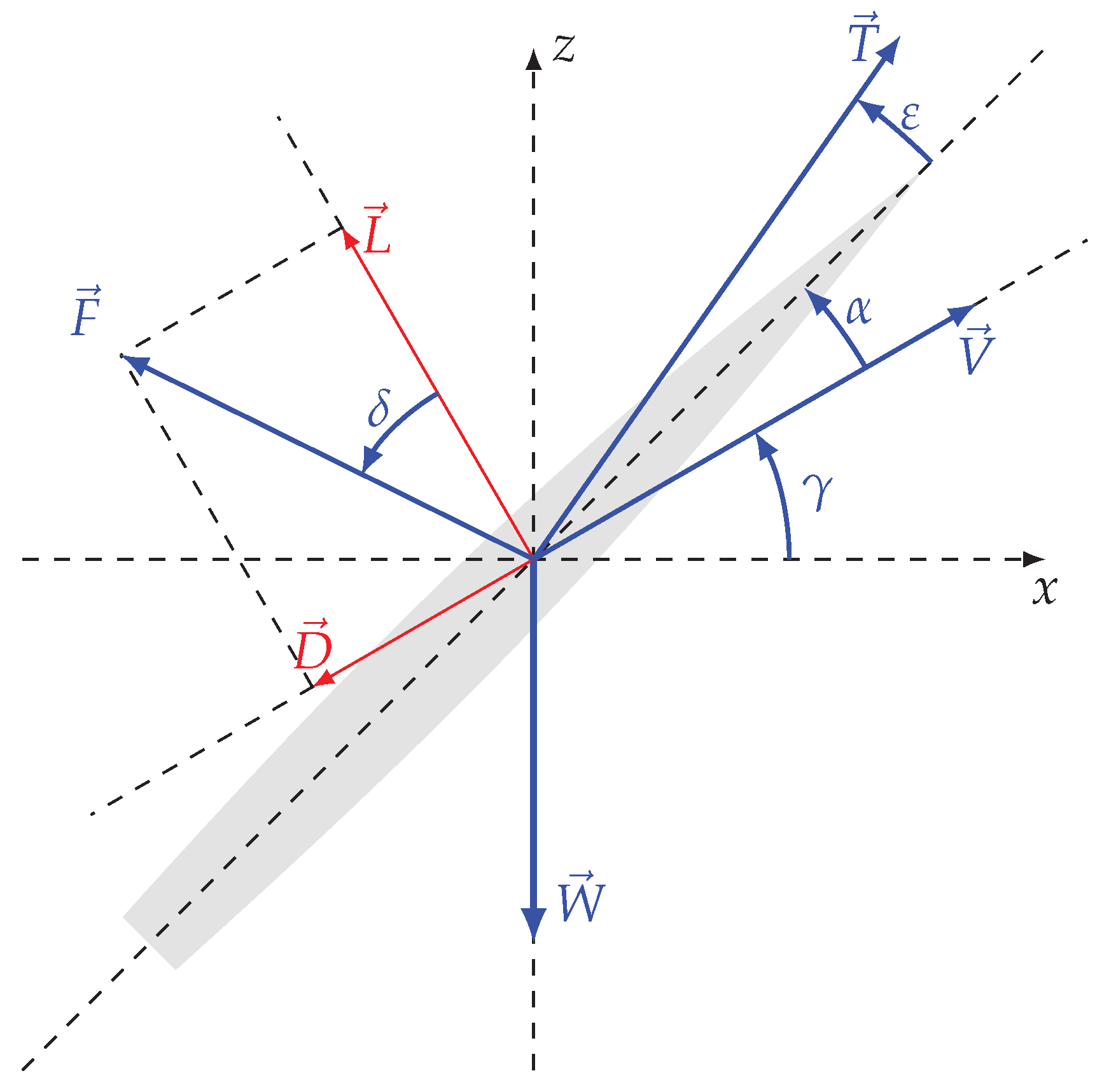
In the absence of aerodynamic or propulsive side force, and omitting the Coriolis force, the rocket trajectory lies on a plane. Two choices of coordinate systems are the most common: (a) a Cartesian earth-fixed coordinate frame; (b) an orthogonal Frenet–Serret frame moving along the trajectory with a longitudinal coordinate tangent to it, and hence the transversal coordinate towards or away from the center of curvature. Using the moving frame (b) and taking as variables the velocity and flight path angle, the acceleration components along and across the flight path are nonlinear; however, in this case, it is straightforward to eliminate time from the trajectory by dividing the longitudinal by the transversal acceleration, leading to a single differential equation for the path. This method was originally applied [
6] to calculate the ballistic trajectory of a projectile of constant mass in a uniform gravity field, with drag proportional to a power of the velocity and opposite to it; the extension of this solution to include the effects of thrust and variable mass has been researched extensively [
7,
8]. The simplicity of this method is lost if the dependence of aerodynamic forces on altitude through the mass density is included; in this case, altitude appears explicitly in the equations of the trajectory, requiring an additional integral equation, without which its solution is not closed. The original method (a) can still be applied by altitude “steps” with constant density.
The present paper aims at including the continuous dependence of aerodynamic forces on altitude through the mass density, and chooses as a starting point the dynamical trajectory equations (
Section 2), using an earth-fixed Cartesian frame (
Section 2.3) rather than the orthogonal frame moving along the trajectory (
Section 2.1); in the latter case, altitude can be eliminated (
Section 2.2) by introducing the radius of the curvature of the trajectory. The use of fixed rather than a moving reference frame leads to two rather than one differential equation for the trajectory (
Section 3). The problem is reduced to a single differential equation (
Section 3.1) by the assumption of constant flight path angle. This rather restrictive assumption is used to develop more simply a one-dimensional method of solution (
Section 3.2), specifying the altitude as a function of time (
Section 3.3). A particular case of trajectory with a constant flight path angle is the vertical climb, which is quite inefficient at gaining speed because it works entirely against gravity; for this reason, the gravity turn is used [
1,
2,
3,
4,
5] which could be approximated by a sequence of straight paths, each with a constant flight path angle. This restriction will be removed in subsequent work, where a continuous gravity turn is considered, using an extended variant of the methods developed here, in order to determine the curved two-dimensional trajectory, by specifying the horizontal and vertical coordinates and velocities as functions of time.
Two methods of solution of the equations of motion are considered, both using the atmospheric mass density as altitude variable; the time variable is: (
Section 3) the burned propellant mass fraction in method I; and (
Section 4) the residual mass fraction in method II. Both methods involve the same dimensionless thrust, gravity and drag parameters (
Section 3.1 and
Section 4.1), and use series expansions (
Section 3.2 and
Section 4.2), whose leading terms are calculated explicitly (
Section 3.3 and
Section 4.3). It is shown that method II is (
Section 5.1) more accurate for a long time, e.g., burn-out, and method I for a short time, e.g., initial climb. Since method I has a more tedious algebra than method II, an alternative method III most suited for a short time is presented (
Section 5.2) using a Taylor series of altitude as a function of time. All three methods apply to all stages of a multi-stage rocket, since they allow arbitrary initial altitude and velocity. The case of free flight without thrust post burnout is considered by a fourth method IV, extending the known solution for constant atmospheric mass density [
3], to exponential variation of altitude; this method leads to a series expansion with the terms of all orders calculated explicitly (
Section 5.3).
7. Conclusions
The four methods I to IV of calculation of rocket trajectories have been applied to a single isothermal atmospheric layer, and use “analytical” solutions of the equations of motion; their accuracy would be improved by dividing the atmosphere into layers as is currently done in the “numerical” solution of the equations of motion. The main difference between the current “numerical” computation of rocket trajectories and the ensemble of the four “analytical” methods introduced in the present paper is that, for the same number N of atmospheric layers, the “analytical” approach should be more accurate than the “numerical” approach because: (i) physically it takes into account the variation of atmospheric density in the solution of the equations of motion, instead of taking the atmospheric density as a constant in each layer and discretizing the differential equation; and (ii) mathematically, for each atmospheric layer or step, the “analytical” solution can be more accurate than a numerical approximation to the solution of the differential equation.
Thus, in the comparison between the “analytical” and the “numerical” approaches: (i) the “analytical” approach is more accurate for the division of the atmosphere in the same number of steps; (ii) for a given accuracy, the “analytical” approach will require a smaller number of steps or atmospheric layers for the same altitude range; (iii) an intermediate choice between (i) and (ii) is to use the “analytical” approach with a smaller number of steps than the “numerical” approach and still obtain higher accuracy. The current approach to the calculation of rocket trajectories can be called “numerical” because it is based on the discretization of the equations of motion and division of the atmosphere into homogeneous layers with constant properties. The “purely analytical” theories I to IV apply to a single isothermal atmospheric layer. What is proposed in this conclusion is actually a “hybrid analytical-numerical” approach that applies the analytical methods to each isothermal atmospheric layer, so as to obtain (iii) higher accuracy with a smaller number of steps over the altitude range of interest.
Considering the four analytical methods of calculation of rocket trajectories, each extends the typical textbook calculation of the effects of variable mass due to propellant consumption, by taking account of the dependence of the aerodynamic forces on the velocity and altitude. The methods I to IV significantly reduce the current large gap between the limited domain of validity of analytical solutions and the broader range of conditions covered by numerical methods. The issue here is not either numerical or analytical methods but rather the symbiotic complementarity of both: (i) the analytical methods make more explicit the effects of rocket, aerodynamic, and atmospheric parameters on the trajectory; and (ii) they assist in the interpretation of the results of numerical methods that can provide results in more complex situations, but whose interpretation may be less transparent. Thus, reducing the gap between analytical and numerical methods is beneficial for both approaches to the calculation of rocket trajectories.
The four methods I to IV of calculation of rocket trajectories were presented in the simplest one-dimensional case of vertical flight to show more clearly the effects of atmospheric conditions and rocket parameters, that appear in six quantities: (i) the dimensionless weight Equation (
36a), (ii) thrust Equation (
36b), and (iii) drag Equation (
36c) parameters; (iv) the reference mass Equation (
38a) that is the mass of a volume of air with the cross-sectional area of the rocket, the length of the atmospheric scale height at initial lift-off mass density, and can be made dimensionless dividing by the lift-off mass; (v) the reference time Equation (
48b) that is the ratio of the lift-off mass to the rate of propellant consumption, and thus would be the burn time for zero residual mass, if the rocket mass was all propellant, and thus always exceeds the real burn time; (vi) the reference velocity Equation (
48a) that corresponds to covering an atmospheric scale height in a reference time. Two distinct rockets with equal values of these six parameters would have the same trajectory specified by the methods I to IV. These methods can be extended from the one-dimensional case of a vertical climb to the practically more relevant two-dimensional case of a gravity turn and may be the subject of future work.








{kind=link}
{kind=link}
{kind=link}
{kind=link}