The micro-propulsion system is usually the largest and the most demanding in terms of mass and volume, thus it is seen as one of the driving subsystems for this mission (MR7 in
Table 1). Moreover, commercial launches are more frequent than deep-space ones (respectively around five per year and one per year), so they can be used as a rideshare more easily [
34]. For this reason an Earth sphere-of-influence (SOI) escape scenario is considered, with the goal of achieving a transfer able to fly-by an asteroid. The Earth escape problem has been investigated in previous work and solutions have been proposed—chemical propulsion followed by electric low-thrust trajectory [
34], low-thrust escape trajectory [
35], and micro-propulsion staging [
36]. However, all of these solutions consider customized propulsion systems, which are not in line with the off-the-shelf approach used in this mission concept.
Both chemical and electric micro propulsion systems are evaluated, following respectively two simplified approaches for high-thrust and low-thrust applications.
4.2.1. Chemical Micro-Propulsion
NASA-JPL Small Body Database Browser [
37] has been used to preliminary compute the required Earth’s SOI escape velocity,
, to inject the spacecraft in an interplanetary transfer towards the target NEA. The Mission Design Tool solves the Lambert problem and provides Pork-Chops plots. It allows the user to enter the name or code of a particular asteroid, giving back information on a mission to the specified target, such as required escape velocity, the ToF, and departure date.
Table 3 gives a short list of targets with their departure dates, ToF, and required escape velocity, which have been chosen as the minimum
solutions, but not all meet MR4.
Recalling the SSGTO injection orbit, and using the patched conics approach, it is possible to compute the approximated
to deliver to the spacecraft at the perigee, to inject it on an escape hyperbola:
where
is the hyperbolic excess velocity,
is the Earth gravitational parameter, and
and
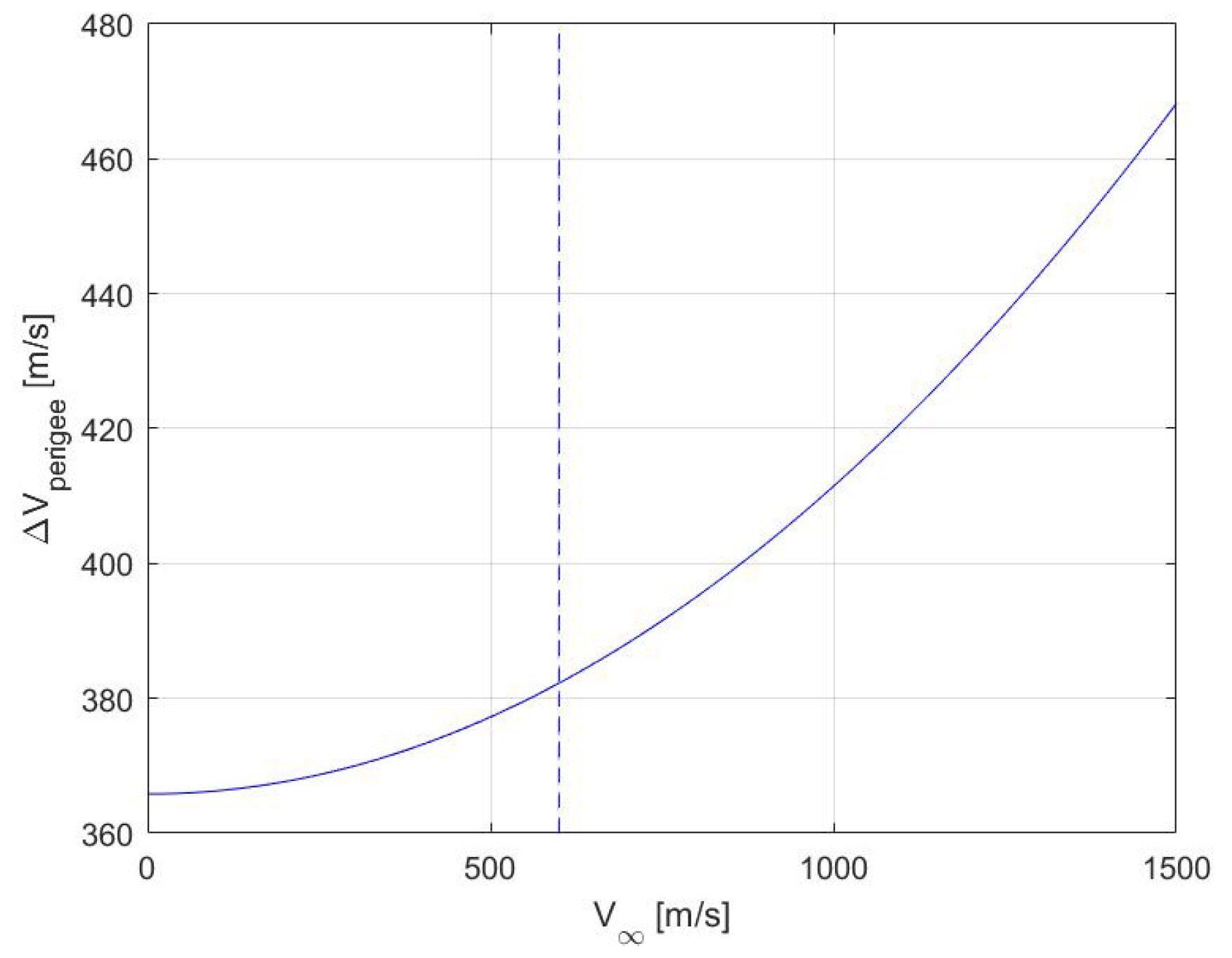
are respectively the radius and velocity at the perigee of the SSGTO. Based on Equation (
3),
Figure 3 shows the relation between the escape velocity
and the perigee
. As it is shown in the plot, 385 m/s of
budget will ensure a hyperbolic excess velocity higher than 0.6 km/s. Considering that 0.6 km/s is the largest escape velocity considered in
Table 3, 385 m/s can be assumed as a general
requirement for the escape trajectory, the TCM(s), and wheels de-saturation. TCM has been described in the Navigation section, while wheels de-saturation will be discussed in the ADCS section. Further studies can be done in order to define the optimal escape strategy, which due to the limited burning time of the micro-propulsion system, can be fractionated in sequential apogee raising maneuvers.
Having defined a general
requirement, the micro-propulsion system can be evaluated. Solid propellant thrusters are not considered, because they would allow one (or few) burn only, if no customized solutions are designed. On the other hand, cold gas micro propulsion systems are characterized by low specific impulse. Therefore, liquid mono- and bi-propellant micro-propulsion systems represent the best solution to inject the CubeSat to a transfer trajectory towards a NEA. On the market, both single thrusters and complete integrated micro-propulsion systems are available. The former allows a more customized sizing in terms of propellant mass, while the latter allows the integration of a ready-to-use micro-propulsion system.
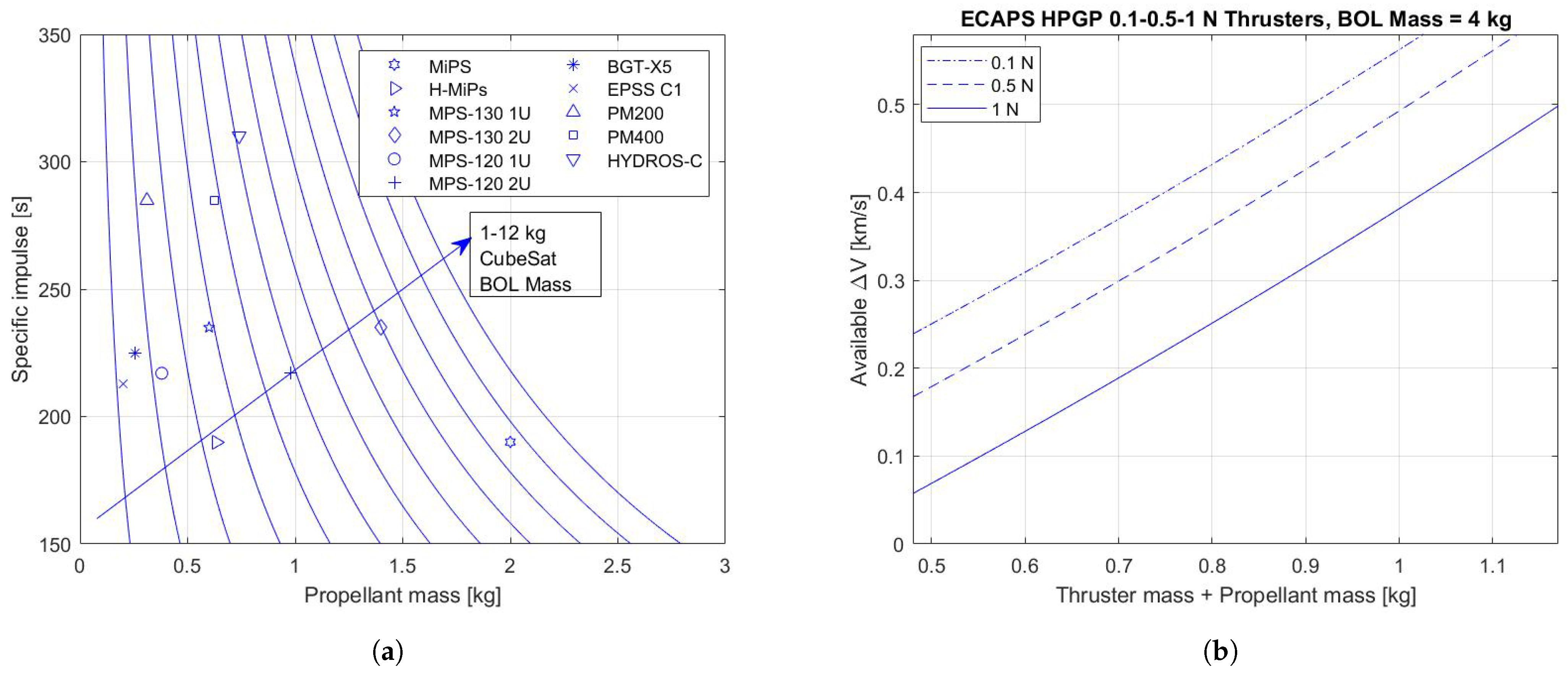
Figure 4a reports the relation between required specific impulse and propellant mass to deliver 385 m/s to a CubeSat with a varying Beginning-Of-Life (BOL) mass, reporting in the chart the micro-propulsion systems with their characteristics; the comparison is between: VACCO MiPS [
38], VACCO ArgoMoon MiPS [
39], Aerojet Rocketdyne MPS-130 [
40], Aerojet Rocketdyne MPS-120 [
41], Busek BGT-X5 [
42], NanoAvionics EPSS C1 [
43], Hyperion Technologies PM200 and PM400 [
44], and Tethers Unlimited HYDROS-C [
45].
Figure 4b shows the performances of three ECAPS HPGP thrusters [
46], taking into account the different thrusters mass. Both plots have been obtained from the rocket equation. From the evaluation chart, the most promising solution is the Aerojet Rocketdyne MPS-130 1U [
40], a mono-propellant micro propulsion system able to provide 385 m/s of
to a CubeSat of 3.9 kg. ECAPS HPGP 0.1 N thruster may offer either higher
or the same
to a heavier CubeSat; however, it would require an additional design of the rest of propulsion system (tank, feeding systems, etc.), which would make the architecture not off-the-shelf.
The selection of the Aerojet Rocketdyne MPS-130 defines then the mass and volume requirements for the architecture and the other subsystems, which need to fit the remaining 2U. Moreover, as this engine is able to deliver the required to a CubeSat of maximum 3.9 kg, and it is characterized by a BOL mass of 1.7 kg, the remaining components of the architecture should not exceed 2.2 kg of mass. This, again, shows that mass and volume for each component are driving parameters for the selection.
4.2.2. Electric Micro-Propulsion
Electric micro-propulsion systems evaluation requires the generation of low-thrust trajectories, whose design (and optimization) is not an easy process. JPL Small-Body Database Browser Mission Design Tool gives some reference values for low-thrust trajectories towards certain asteroids.
Trajectory optimization for NEAs fly-by has been widely explored in recent years, showing the feasibility of such missions. In Reference [
47], a solar electric propulsion system, with Isp = 1200 s and thrust level at 1 AU equal to 0.006 N, was considered, showing small
for more than 10 NEAs, and comparing them with rendezvous missions. In Reference [
48], an electrospray thruster characterized by Isp = 2300 s and T = 100
N was considered, and the mission feasibility with low
(less than 85 m/s) was demonstrated for more than 40 targets (using as initial condition Sun-Earth Mean Barycenter L1 and L2). However, given the
, which can be retrieved from literature, the rocket equation cannot be used to compute the required propellant mass, since it is based on a constant ejection velocity assumption. This is clearly not the case of low-thrust trajectory with electric thrusters, which are based on a variable thrust. This limits the applicability of previous studies for preliminary evaluation of COTS electric micro-propulsion systems for asteroid fly-by. Indeed, the best approach would be passing through an optimization process for each thruster, giving as output the required control law to reach the target. However, a shape-based low-thrust trajectory design approach can be exploited to preliminary quantify the amount of propellant mass needed to reach the target, without passing through a proper optimization process. The spherical coordinates shaping trajectory design approach [
49], as the name suggests, is based on imposing the shape to the trajectory, constraining the initial condition (Earth) and the final condition (target asteroid). It can be used to generate a first guess solution before the optimization, as it is done in Reference [
47].
The method is particularly suited for rendezvous low-thrust trajectory design, since it imposes the match with the velocity and position of the target asteroid as final condition. Since usually rendezvous missions are more expensive than a fly-by from the required (and the propellant mass) perspective, this method is not perfectly suited for a fly-by trajectory design, since it would overestimate the required propellant mass. However, the shaping method solution, which can differ significantly from the optimal one, can be triggered towards the fuel optimal solution by means of some particular constraints and by means of three grid searches on ToF, departure date (node passage), and final velocity norm.
First, it is possible to constrain the encounter at one of the two nodes (descending or ascending) of the asteroid orbit. This is because NEAs orbits are characterized by a various range of inclinations, and setting the encounter at the node would in principle avoid expensive change-of-plane maneuvers. However this is not sufficient to guarantee no plane changes, because the asteroid velocity at the node is not necessarily coplanar with Earth’s orbit, and since the shaping approach will be based on imposing that final velocity, the resulting trajectory will be expensive and out-of-plane. To limit this, it is possible to impose the final condition (corresponding to the encounter at the node) based on a ‘fictitious’ orbit which has all the same orbital elements with the original asteroid orbit, but the inclination imposed to zero. In other words this translates into a final velocity constraint coplanar with Earth’s orbit, which is sufficient to avoid plane-changes.
Then, now that the approach is ‘preliminary’ optimized, it is possible to perform a grid search based on 3 varying parameters:
ToF: from 100 to 600 days, with a time step of 10 days;
Final velocity: from −2 km/s to +2 km/s of the fictitious asteroid velocity at the node, with a velocity step of 0.1 km/s (in order to have a wider range of relative velocities);
Node passage: the first 10 passages per node (20 in total) after the last ephemerides data available on JPL Small-Body Database Browser (31 May 2020), which translates in around a decade.
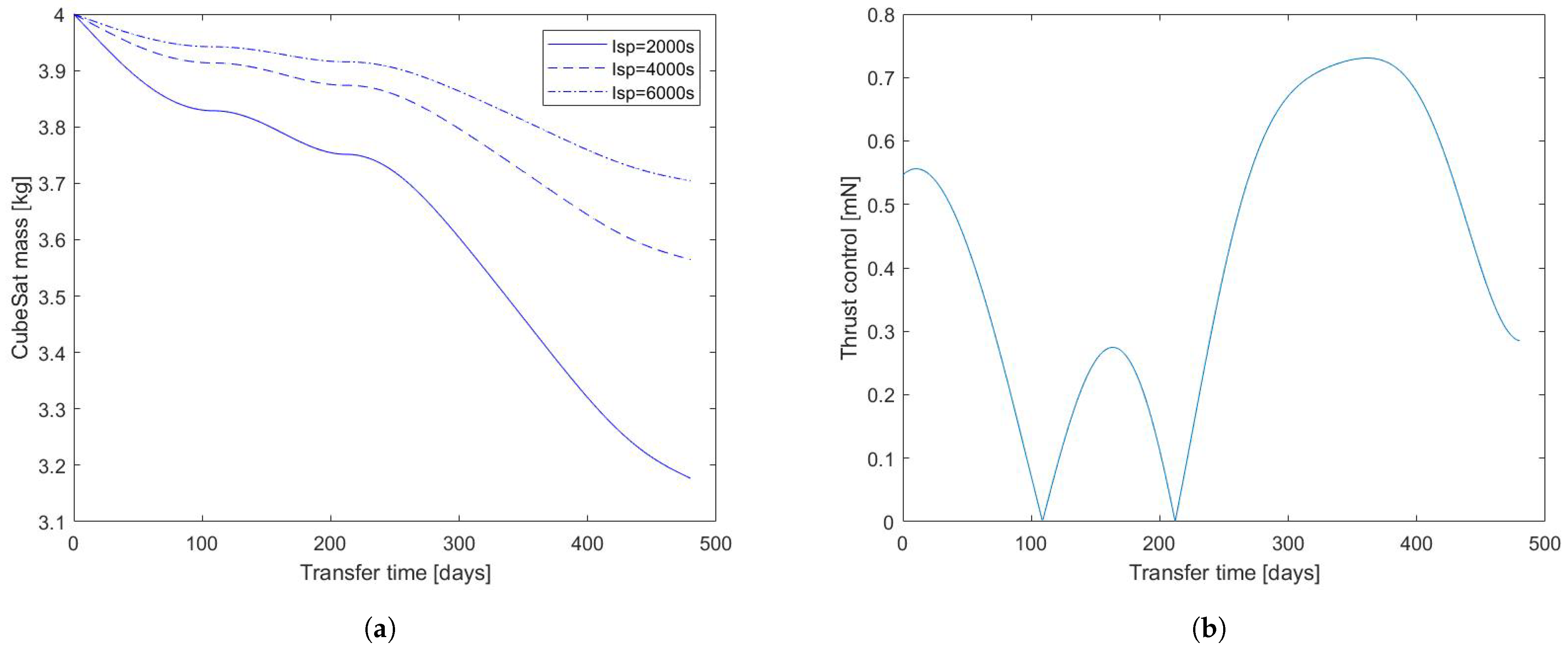
Then the minimum
is found and from the control acceleration profile it is possible to compute the mass and thrust profiles, as a function of the specific impulse (which is assumed constant) and of the BOL mass set as 4 kg, by imposing a set of equations: 2nd Newton law and mass flow rate equation. Again, the results of this search grid is not necessarily the optimal solution, and it could be improved by extending the final velocity range and by making varying also the in-plane angle. However at this stage it is sufficient to get a rough requirement on propellant mass, that can be eventually increased with a certain margin. The evaluation process has been repeated for the 16 NEAs of
Table 3.
Table 4 reports the values for ten of them, as the ones with a reasonable propellant mass for a 4 kg CubeSat. The other six (3200 Phaethon, 66391 Moshup, 153201, 142464, 138127, 35107) resulted in extremely large required propellant mass (more than 2.5 kg for a 4 kg CubeSat) and they have been excluded from the table. The other ten showed a maximum required propellant mass of 1.1 kg (for the lowest Isp = 2000 s) and thrust levels within 1.1 mN (with the exception of 4034 Vishnu).
Figure 5 reports the extended results for one of the NEAs, 65679.
Considering electric propulsion systems with specific impulse below 2000 s would impact significantly on the propellant mass, affecting the feasibility of the mission. So, Sitael HT-100 [
50], Mars Space LTD PPTCUP [
51], and Busek BHT-200 [
52] are not applicable to this mission.
Higher specific impulse options are Busek BIT-3 ion thruster [
53], Mars Space LTD mini RF ion engine [
54], and Enpulsion IFM Micro 100 Thruster [
55] and Nano Thruster [
56]. BIT-3 and IFM Micro 100 micro-propulsion systems have however an off-the-shelf configuration too large for a 3U CubeSat, respectively ∼1.8U and ∼2.2U, which does not leave enough space for the rest of the subsystems. On the other hand Mars Space LTD mini RF is a thruster occupying approximately 0.6U, but no information are at the moment available for tanks, feeding systems and other components. Required propellant mass for Isp = 2500 s oscillate between 0.5 and 1.2 kg, and considering all the components (tank, feeding system, etc.), this thruster would require no less than 1.3U. The large volume, in coupling with the required additional design of the rest of the micro propulsion system (as for the ECAPS HGPG highlighted in the previous subsection), makes this thruster not suitable for this application. Enpulsion IFM Nano thruster occupies a relatively small volume (∼0.8U), with dry/wet mass 0.67/0.9 kg, ensuring a sufficient propellant mass for almost all the ten reachable NEAs (due to a specific impulse up to 6000 s). However, its maximum thrust level of 0.35 mN is not sufficient, since all the analyzed NEAs require peak thrust magnitude of at least 0.8 mN, as reported in
Table 4. So, without further analysis, optimizing the trajectory with a limit on the maximum thrust, IFM Nano thruster is not suitable for this application.
The low-thrust trajectory analysis showed that, considering these targets, electric propulsion systems are less performant than chemical ones for a 3U CubeSat. Moreover, it has to be remarked that it has been assumed Earth’s position and velocity as initial conditions, which in a patched conics approach translates into a zero escape velocity from the SOI. So, to these results, the low-thrust escape trajectory has to be added, resulting in even larger propellant consumption. However, electric propulsion applicability cannot be excluded in general, since some optimization techniques may show its feasibility with other NEA targets, but for the purposes of this work, chemical propulsion will be chosen. Additionally, electric micro-propulsion systems usually require larger power consumption than chemical ones, which for a 3U CubeSat imposes several challenges for the power subsystem design. Moreover, for larger CubeSat architectures, where heavier and larger propulsion systems can be integrated, together with larger allowable solar panels delivering higher powers to the subsystems, electric propulsion system overcomes all the problems related to this compact architecture. This is the case of ESA M-Argo, which is aimed to rendezvous a NEA using low-thrust trajectory based on electric propulsion.
Finally, as the Navigation section showed, asteroid visibility times are short. Then, high-thrust chemical propulsion systems are preferred over low-thrust electric propulsion systems, as they allow impulsive maneuvers.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}