
Temperature and Pressure Dynamic Control for the Aircraft Engine Bleed Air Simulation Test Using the LPID Controller


Abstract
:1. Introduction
2. Methodology
2.1. Mathematical Modeling
2.2. Lookup Table-Based PID Controller
- Debug as many PID parameters as possible under different working conditions, including strong PID, general PID, weak PID with excellent steady-state accuracy.
- When the , we use the strong PID to minimize error quickly.
- When the , we adopt the weak PID.
- When the , which indicates the absolute error value, tends to be very small, we can use the PI to decrease the static error.
- When the deviation is slight to a certain extent, , the concept of the dead zone can even be introduced, at this moment, the output of the controller retains invariable, namely, .
2.3. Simulation
3. Experimental Work
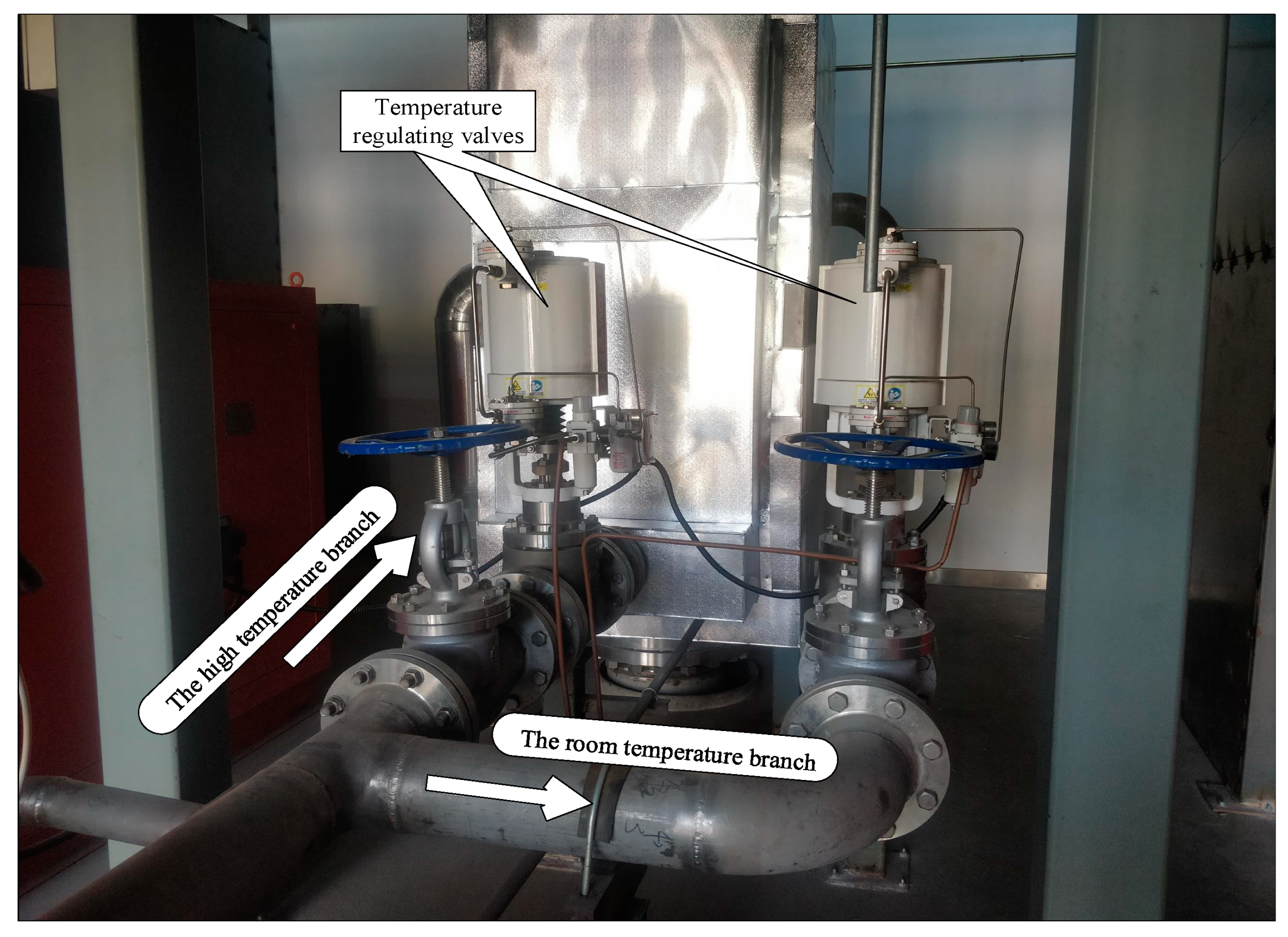
3.1. Overall Design of the TT&C System
3.2. Experimental Method
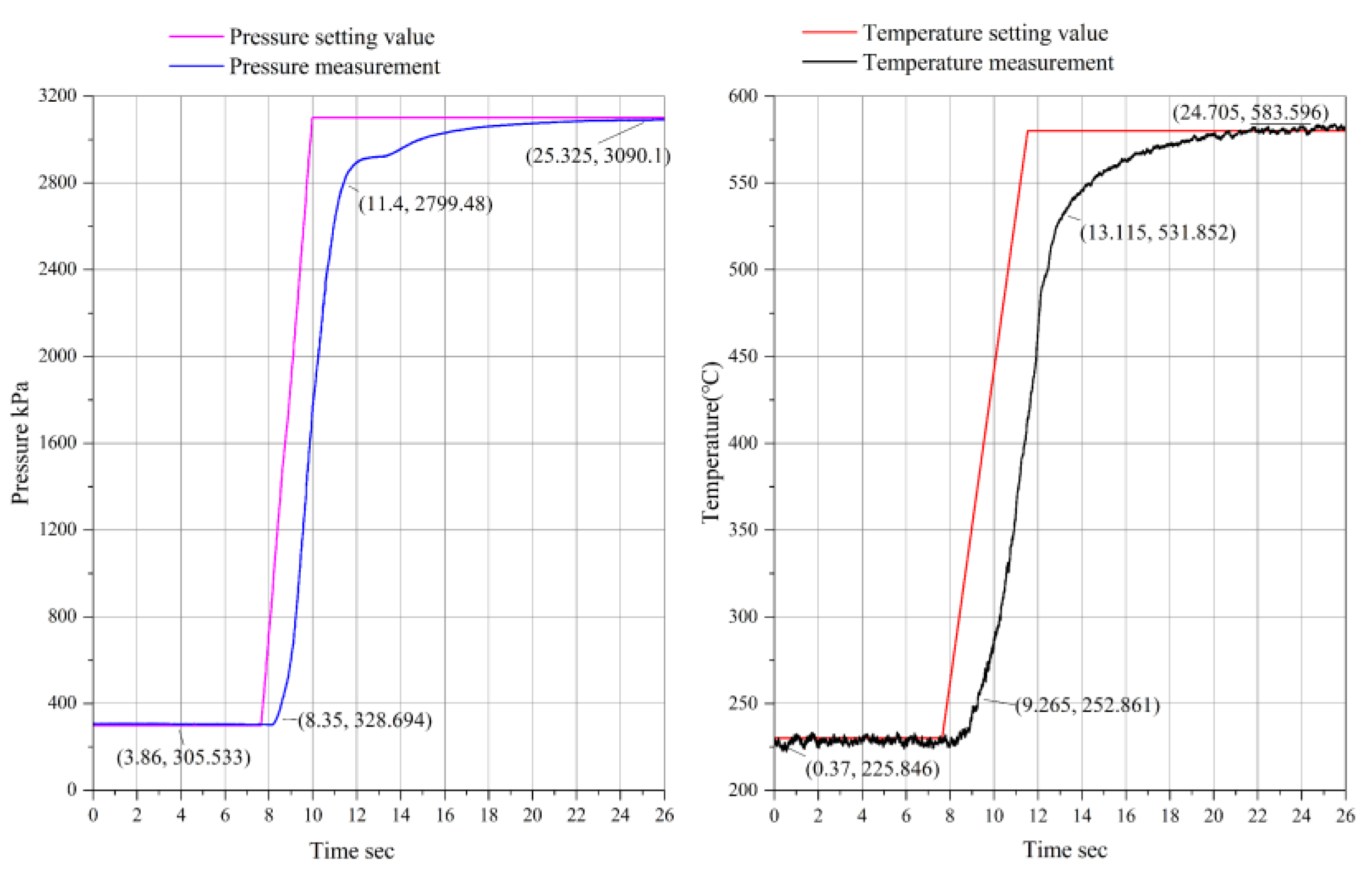
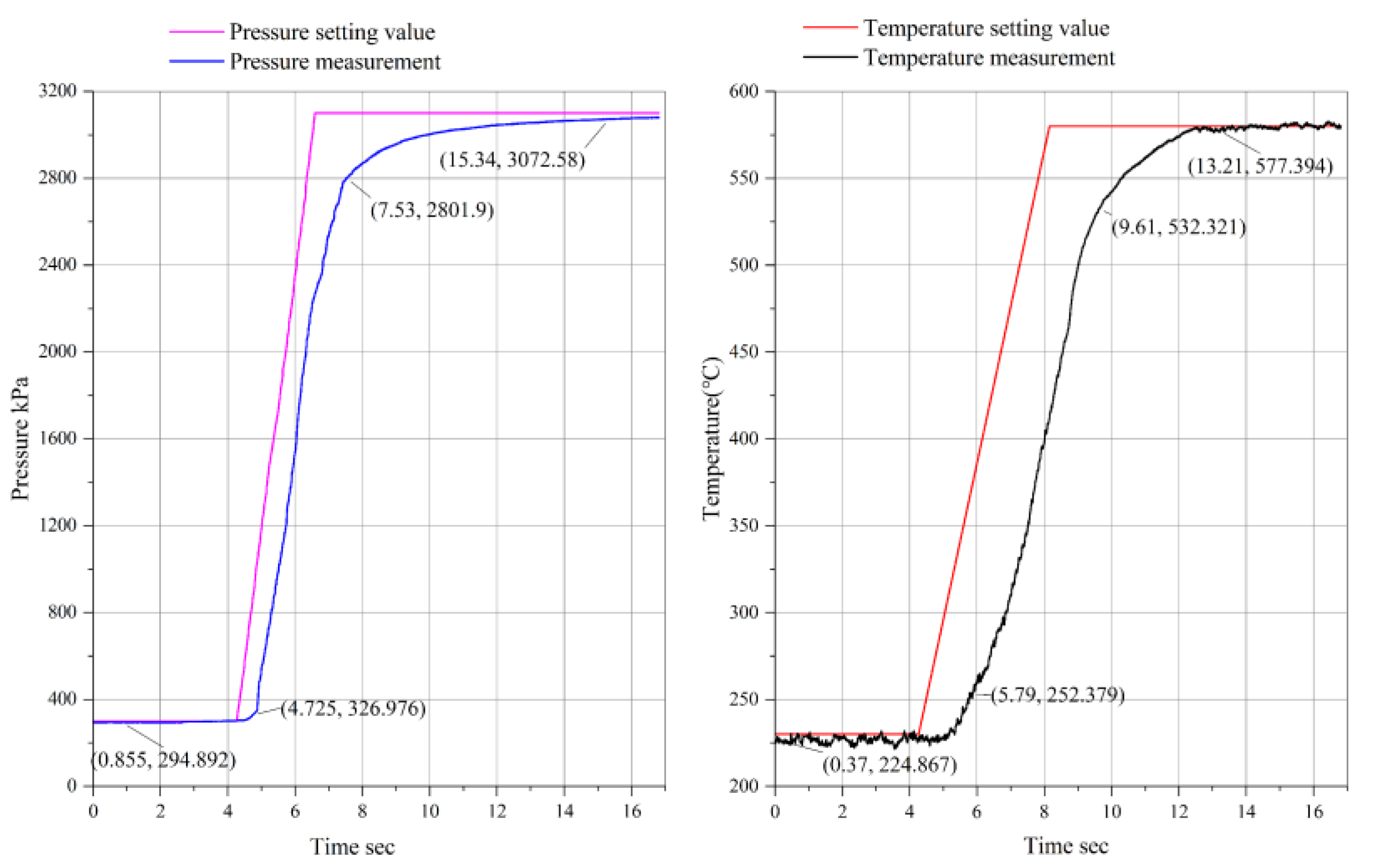
4. Results and Discussion
5. Conclusions
- (1)
- The test results were consistent with the simulation results, which shows the effectiveness of the LPID controller;
- (2)
- The temperature and pressure dynamic tests errors were within 10%, and the steady-state accuracies were within ±2%. The pressure and temperature control had a high precision and a low overshoot amount, and the dynamic response and stability had a high control performance;
- (3)
- The laboratory with the LPID controller can create a thermal environment with a vast range of pressure and temperature variation. Moreover, the temperature and pressure change rate can be selected in a wide range;
- (4)
- Under sufficient test conditions, the repeatability of the tests is acceptable, and dynamic and steady-state tests can be performed on different TAI/ECS test pieces.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Reddy, P.K.P. Environmental control system of military aircraft, LCA. Int. J. Eng. 2013, 6, 635–642. [Google Scholar]
- Cao, Y.; Tan, W.; Wu, Z. Aircraft icing: An ongoing threat to aviation safety. Aerosp. Sci. Technol. 2018, 75, 353–385. [Google Scholar] [CrossRef]
- Bagshaw, M.; Illig, P. The Aircraft Cabin Environment. In Travel Medicine; Elsevier: Amsterdam, The Netherlands, 2019; pp. 429–436. [Google Scholar]
- Dai, Z.; Cui, Y. Study on the Fast Air Heating Method for the Rig of the Environmental Control System of the Aircraft. J. Phys. Conf. Ser. 2018, 1060, 012072. [Google Scholar] [CrossRef]
- Cui, Y. Study on the Simulink Model for the Rig of the Environmental Control System of the Aircraft. J. Phys. Conf. Ser. 2018, 1060, 012073. [Google Scholar] [CrossRef] [Green Version]
- Jian, W.; Xue, L.-X. Design of engine bleed air simulation test bench temperature control system based on humanoid intelligence. In Proceedings of the CSAA/IET International Conference on Aircraft Utility Systems (AUS 2018), Guiyang, China, 19–22 June 2018; IET: London, UK, 2018. [Google Scholar]
- Zhao, H.; Hou, Y.; Zhu, Y.; Chen, L.; Chen, S. Experimental study on the performance of an aircraft environmental control system. Appl. Therm. Eng. 2009, 29, 3284–3288. [Google Scholar] [CrossRef]
- Şahin, Y.; Göçer, A. Control of air flow temperature and pressure in the pipelines with PID. Int. Rev. Appl. Sci. Eng. 2020, 11, 167–173. [Google Scholar] [CrossRef]
- Liu, H.; Lee, J.-C.; Li, B.-R. High precision pressure control of a pneumatic chamber using a hybrid fuzzy PID controller. Int. J. Precis. Eng. Manuf. 2007, 8, 8–13. [Google Scholar]
- Dequan, S.; Guili, G.; Zhiwei, G.; Peng, X. Application of Expert Fuzzy PID Method for Temperature Control of Heating Furnace. Procedia Eng. 2012, 29, 257–261. [Google Scholar] [CrossRef]
- Singhala, P.; Dhrumil, S.; Bhavikkumar, P. Temperature control using fuzzy logic. arXiv 2014, arXiv:1402.3654. [Google Scholar]
- Khalid, M.; Omatu, S. A neural network controller for a temperature control system. IEEE Control Syst. 1992, 12, 58–64. [Google Scholar]
- Yu, L.; Lim, J.G.; Fei, S. An improved single neuron self-adaptive PID control scheme of superheated steam temperature control system. Int. J. Syst. Control Inf. Process. 2017, 2, 1–13. [Google Scholar] [CrossRef]
- Wang, G.Y.; Han, P.; Wang, D.F.; Zhou, L.H. Studies andof PFC-PID cascade control strategy in main steam temperature control system. Proc. CSEE 2002, 12, 011. [Google Scholar]
- Zhang, J.; Zhang, F.; Ren, M.; Hou, G.; Fang, F. Cascade control of superheated steam temperature with neuro-PID controller. ISA Trans. 2012, 51, 778–785. [Google Scholar] [CrossRef] [PubMed]
- Chew, I.M.; Wong, F.; Bono, A.; Nandong, J.; Wong, K.I. Genetic algorithm optimization analysis for temperature control system using cascade control loop model. Int. J. Comput. Digit. Syst. 2020, 9, 119–128. [Google Scholar]
- Kodosky, J. LabVIEW. In Proceedings of the ACM on Programming Languages 4.HOPL (2020), London, UK, 14–16 June 2020; pp. 1–54. [Google Scholar]
- Hodal, P.; Liu, G. Bleed air temperature regulation system: Modeling, control, and simulation. In Proceedings of the 2005 IEEE Conference on Control Applications, Toronto, ON, Canada, 28–31 August 2005. [Google Scholar]
- Cui, G.M.; Wang, J.Y.; Jiang, T.; Hu, X.B. Transfer Behavior of Heat Exchanger. In Advanced Materials Research; Trans Tech Publications Ltd.: Freienbach, Switzerland, 2011; Volume 233. [Google Scholar]
- Yin, J.; Jensen, M.K. Analytic model for transient heat exchanger response. Int. J. Heat Mass Transf. 2003, 46, 3255–3264. [Google Scholar] [CrossRef]
- Youn, C.; Saito, K.; Furuya, M. Simulation of Dynamic Characteristics of Pneumatic Control Valve with Smart Valve Positioner. In Fluids Engineering Division Summer Meeting; American Society of Mechanical Engineers: New York, NY, USA, 2019; Volume 59049. [Google Scholar]
- Bequette, B.W. Process Control: Modeling, Design, and Simulation; Prentice Hall Professional: Hoboken, NJ, USA, 2003. [Google Scholar]
- Lei, Z.; Jing, Z. Implement of Increment-model PID Control of PLC in Constant-pressure Water System. In Proceedings of the 2007 8th International Conference on Electronic Measurement and Instruments, Xi’an, China, 16–18 August 2007. [Google Scholar]
- Shahrokhi, M.; Alireza, Z. Comparison of PID Controller Tuning Methods; Department of Chemical & Petroleum Engineering Sharif University of Technology: Tehran, Iran, 2013; pp. 1–2. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Test Equipment 1: Compressor Bleed Air | Test Equipment 2: Fan Bleed Air | |||
|---|---|---|---|---|---|
| Conditions | = 650 °C | = 650 °C | = 200 °C | ||
| Pressure range (kPa) | 300–3100 | 250–1400 | 300–3100 | 300–3100 | 105–220 |
| Pressure variation ratio (kPa/s) | 900 | 480 | 50 | 900 | 10 |
| Temperature range (°C) | 230–580 | 150–480 | 230–580 | 230–580 | 40–115 |
| Temperature variation ratio (°C/s) | 90 | 55 | 5 | 90 | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Liu, M.; Wu, H.; Wang, J. Temperature and Pressure Dynamic Control for the Aircraft Engine Bleed Air Simulation Test Using the LPID Controller. Aerospace 2021, 8, 367. https://doi.org/10.3390/aerospace8120367
Zheng Y, Liu M, Wu H, Wang J. Temperature and Pressure Dynamic Control for the Aircraft Engine Bleed Air Simulation Test Using the LPID Controller. Aerospace. 2021; 8(12):367. https://doi.org/10.3390/aerospace8120367
Chicago/Turabian StyleZheng, Yonggui, Meng Liu, Hao Wu, and Jun Wang. 2021. "Temperature and Pressure Dynamic Control for the Aircraft Engine Bleed Air Simulation Test Using the LPID Controller" Aerospace 8, no. 12: 367. https://doi.org/10.3390/aerospace8120367
APA StyleZheng, Y., Liu, M., Wu, H., & Wang, J. (2021). Temperature and Pressure Dynamic Control for the Aircraft Engine Bleed Air Simulation Test Using the LPID Controller. Aerospace, 8(12), 367. https://doi.org/10.3390/aerospace8120367