
Design and Simulation of a Flexible Bending Actuator for Solar Sail Attitude Control



Abstract
:1. Introduction
2. Solar Sail and Flexible Bending Actuator
2.1. Actuator Design and Dynamics Model
2.2. Solar Sail Design and Dynamics Model
3. Solar Sail Attitude Control
3.1. Actuator Control Driver with PID-BP Neural Network
3.1.1. Forward Propagation
- Output of input layer
- Input of hidden layer
- Output of hidden layer
- Input of output layer
- Output of output layer
3.1.2. Back Propagation
3.2. Solar Sail Attitude Control System Design
4. Results
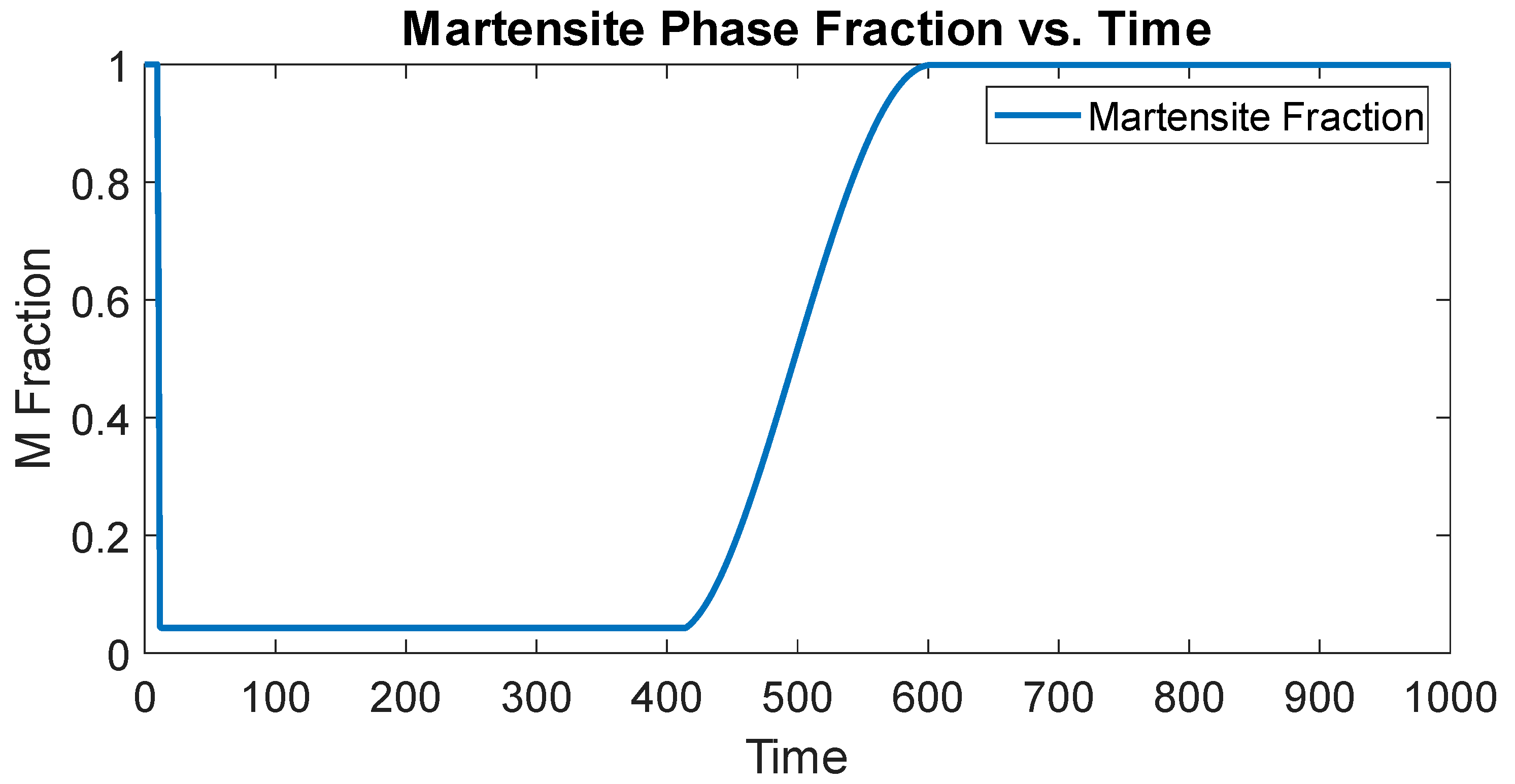
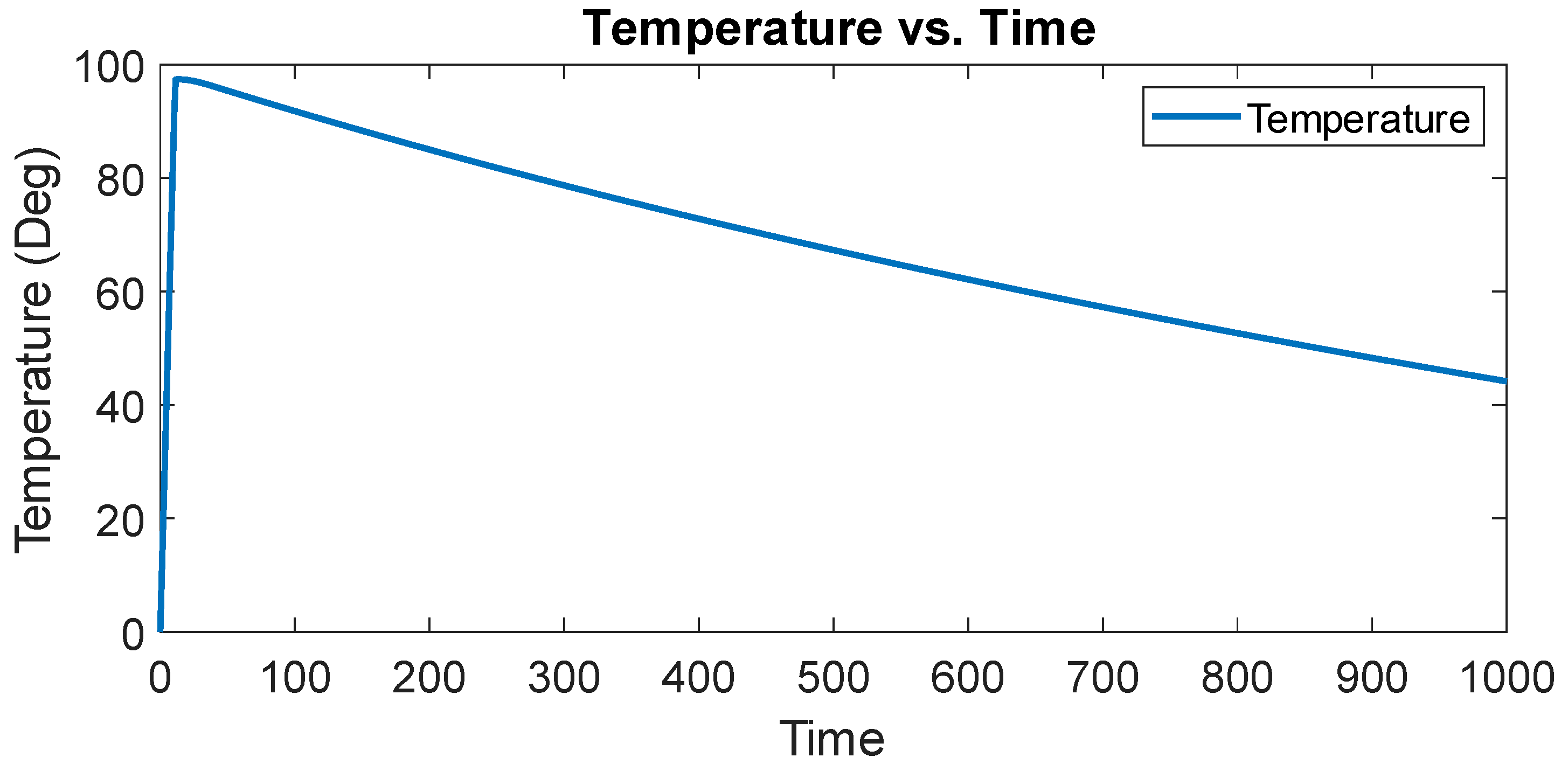
4.1. SMA Actuator Control
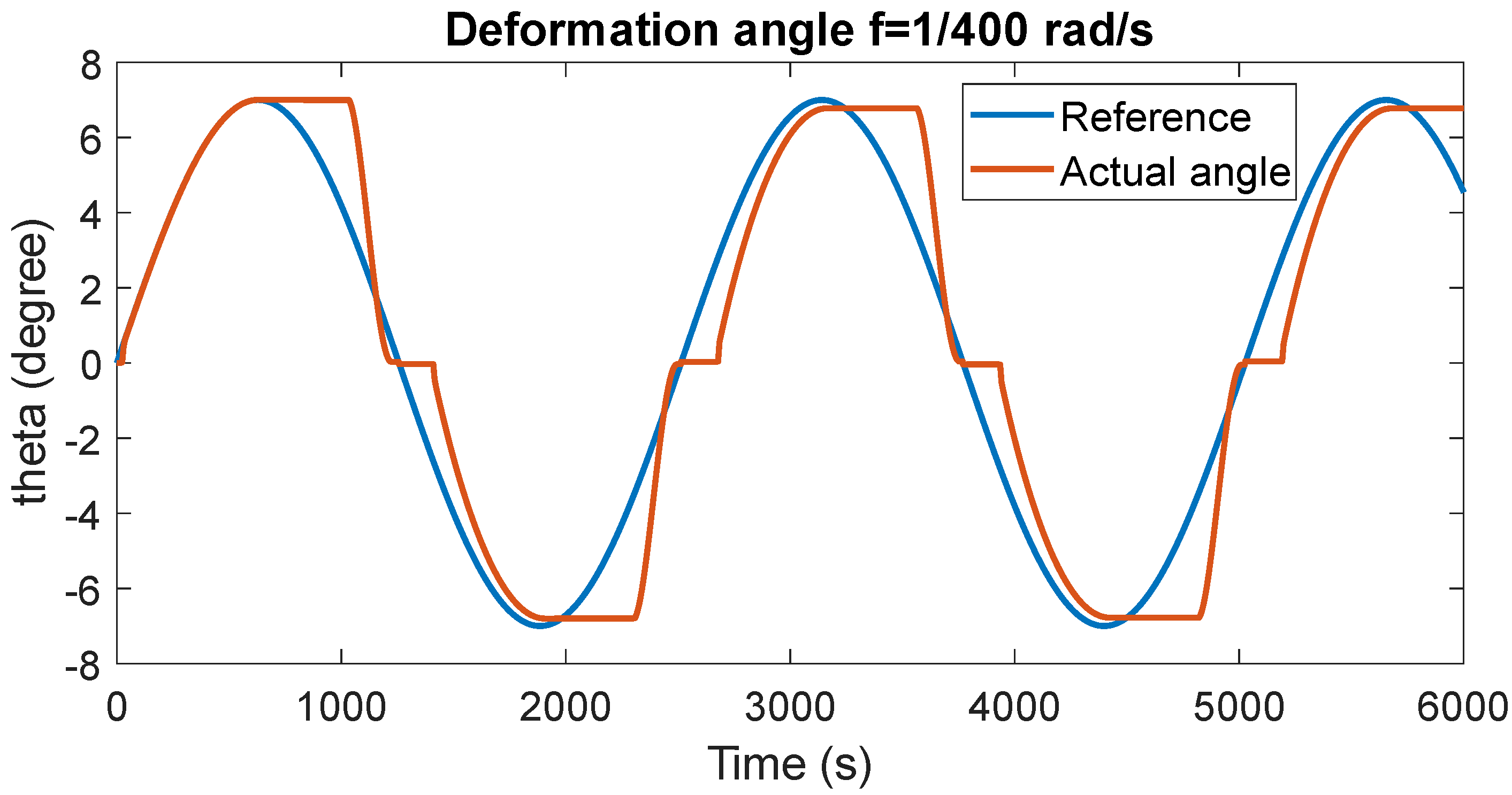
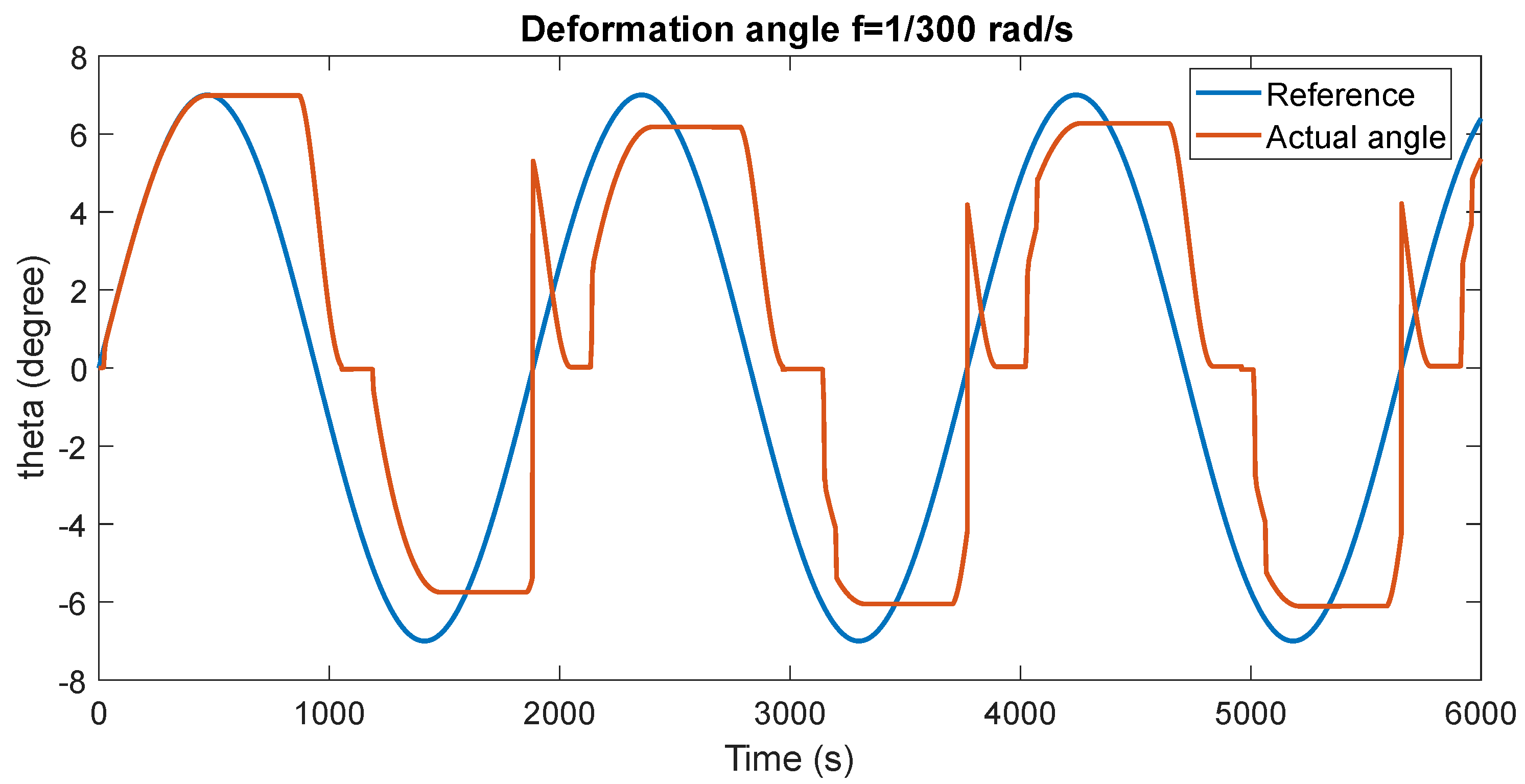
4.2. Attitude Control of Solar Sail
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Spencer, D.A.; Johnson, L.; Long, A.C. Solar sailing technology challenges. Aerosp. Sci. Technol. 2019, 93, 105276. [Google Scholar] [CrossRef]
- Tsuda, Y.; Mori, O.; Funase, R.; Sawada, H.; Yamamoto, T.; Saiki, T.; Endo, T.; Yonekura, K.; Hoshino, H.; Kawaguchi, J.I. Achievement of IKAROS—Japanese deep space solar sail demonstration mission. Acta Astronaut. 2013, 82, 183–188. [Google Scholar] [CrossRef]
- Song, Y.; Gong, S. Solar-sail trajectory design for multiple near-Earth asteroid exploration based on deep neural networks. Aerosp. Sci. Technol. 2019, 91, 28–40. [Google Scholar] [CrossRef] [Green Version]
- Underwood, C.; Viquerat, A.; Schenk, M.; Taylor, B.; Massimiani, C.; Duke, R.; Stewart, B.; Fellowes, S.; Bridges, C.; Aglietti, G. InflateSail de-orbit flight demonstration results and follow-on drag-sail applications. Acta Astronaut. 2019, 162, 344–358. [Google Scholar] [CrossRef] [Green Version]
- Perakis, N.; Schrenk, L.E.; Gutsmiedl, J.; Koop, A.; Losekamm, M.J. Project Dragonfly: A feasibility study of interstellar travel using laser-powered light sail propulsion. Acta Astronaut. 2016, 129, 316–324. [Google Scholar] [CrossRef]
- Niccolai, L.; Caruso, A.; Quarta, A.A.; Mengali, G. Artificial collinear Lagrangian point maintenance with electric solar wind sail. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4467–4477. [Google Scholar] [CrossRef]
- Farrés, A.; Heiligers, J.; Miguel, N. Road Map to L4/L5 with a solar sail. Aerosp. Sci. Technol. 2019, 95, 105458. [Google Scholar] [CrossRef]
- Mengali, G.; Quarta, A.A. Solar sail trajectories with piecewise-constant steering laws. Aerosp. Sci. Technol. 2009, 13, 431–441. [Google Scholar] [CrossRef]
- Peloni, A.; Rao, A.V.; Ceriotti, M. Automated trajectory optimizer for solar sailing (atoss). Aerosp. Sci. Technol. 2018, 72, 465–475. [Google Scholar] [CrossRef] [Green Version]
- Niccolai, L.; Quarta, A.A.; Mengali, G. Solar sail trajectory analysis with asymptotic expansion method. Aerosp. Sci. Technol. 2017, 68, 431–440. [Google Scholar] [CrossRef]
- Pan, X.; Xu, M.; Santos, R. Trajectory optimization for solar sail in cislunar navigation constellation with minimal lightness number. Aerosp. Sci. Technol. 2017, 70, 559–567. [Google Scholar] [CrossRef]
- Bassetto, M.; Quarta, A.A.; Mengali, G.; Cipolla, V. Trajectory Analysis of a Sun-Facing Solar Sail with Optical Degradation. J. Guid. Control Dyn. 2020, 43, 1727–1732. [Google Scholar] [CrossRef]
- Caruso, A.; Niccolai, L.; Mengali, G.; Quarta, A.A. Electric sail trajectory correction in presence of environmental uncertainties. Aerosp. Sci. Technol. 2019, 94, 105395. [Google Scholar] [CrossRef]
- Huo, M.; Mengali, G.; Quarta, A.A.; Qi, N. Electric sail trajectory design with Bezier curve-based shaping approach. Aerosp. Sci. Technol. 2019, 88, 126–135. [Google Scholar] [CrossRef]
- Niccolai, L.; Quarta, A.A.; Mengali, G. Analytical solution of the optimal steering law for non-ideal solar sail. Aerosp. Sci. Technol. 2017, 62, 11–18. [Google Scholar] [CrossRef]
- Wang, W.; Mengali, G.; Quarta, A.A.; Baoyin, H. Decentralized fault-tolerant control for multiple electric sail relative motion at artificial Lagrange points. Aerosp. Sci. Technol. 2020, 103, 105904. [Google Scholar] [CrossRef]
- Liu, J.; Rong, S.; Shen, F.; Cui, N. Dynamics and control of a flexible solar sail. Math. Probl. Eng. 2014, 2014. [Google Scholar] [CrossRef] [Green Version]
- Wie, B. Solar sail attitude control and dynamics, part 1. J. Guid. Control Dyn. 2004, 27, 526–535. [Google Scholar] [CrossRef]
- Sperber, E.; Fu, B.; Eke, F. Large angle reorientation of a solar sail using gimballed mass control. J. Astronaut. Sci. 2016, 63, 103–123. [Google Scholar] [CrossRef]
- Wie, B. Solar sail attitude control and dynamics, part two. J. Guid. Control Dyn. 2004, 27, 536–544. [Google Scholar] [CrossRef]
- Fu, B.; Sperber, E.; Eke, F. Solar sail technology—A state of the art review. Prog. Aerosp. Sci. 2016, 86, 1–19. [Google Scholar] [CrossRef]
- Niccolai, L.; Mengali, G.; Quarta, A.A.; Caruso, A. Feedback control law of solar sail with variable surface reflectivity at Sun-Earth collinear equilibrium points. Aerosp. Sci. Technol. 2020, 106, 106144. [Google Scholar] [CrossRef]
- Bianchi, C.; Niccolai, L.; Mengali, G.; Quarta, A.A. Collinear artificial equilibrium point maintenance with a wrinkled solar sail. Aerosp. Sci. Technol. 2021, 119, 107150. [Google Scholar] [CrossRef]
- Qu, Q.; Xu, M.; Luo, T. Design concept for In-Drag Sail with individually controllable elements. Aerosp. Sci. Technol. 2019, 89, 382–391. [Google Scholar] [CrossRef]
- Mavroidis, C. Development of advanced actuators using shape memory alloys and electrorheological fluids. J. Res. Nondestruct. Eval. 2002, 14, 1–32. [Google Scholar] [CrossRef]
- Bovesecchi, G.; Corasaniti, S.; Costanza, G.; Tata, M.E. A novel self-deployable solar sail system activated by shape memory alloys. Aerospace 2019, 6, 78. [Google Scholar] [CrossRef] [Green Version]
- Elahinia, M.H.; Ashrafiuon, H. Nonlinear control of a shape memory alloy actuated manipulator. J. Vib. Acoust. 2002, 124, 566–575. [Google Scholar] [CrossRef]
- Elahinia, M.; Esfahani, E.T.; Wang, S. Control of sma systems: Review of the state of the art. Shape Mem. Alloy. Manuf. Prop. Appl. 2011, 381–392. [Google Scholar]
- Kannan, S. Modeling and Control of Shape Memory Alloy Actuator. Ph.D. Thesis, Ecole Nationale Supérieure D’arts et Métiers-ENSAM, Paris, France, 2011. [Google Scholar]
- Yang, K.; Chenglin, G. Variable Structure Controller Of Novel Embedded Sma Actuators. IU-J. Electr. Electron. Eng. 2011, 5, 1255–1263. [Google Scholar]
- Razov, A.; Cherniavsky, A. Applications of shape memory alloys in space engineering: Past and future. In Proceedings of the 8th European Space Mechanisms and Tribology Symposium, Toulouse, France, 29 September–1 October 1999; p. 141. [Google Scholar]
- Schetky, L.M. Shape memory alloy applications in space systems. Mater. Des. 1991, 12, 29–32. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Dm | 28 GPa | cp | 320 J/kg °C |
| Da | 75 GPa | As | 3.2 × 10−4 m2 |
| As | 88 °C | εmax | 4% |
| Af | 98 °C | d | 0.015 m |
| Ms | 72 °C | A | 0.00103 m2 |
| Mf | 62 °C | E | 5.51 MPa |
| M | 5.27 × 10−3 kg/m | I2 | 5.26 × 10−8 m4 |
| R | 4.3 Ω/m | CM | 10 MPa/°K |
| L | 0.1 m | CA | 10 MPa/°K |
| Θ | 0.055 MPa/°C | T0 | −100 °C |
| Aa | 8.17 × 10−7 m2 | rw | 0.51 mm |
| Parameter | Description | Value |
|---|---|---|
| ms | Total Mass | 3 kg |
| I | Moment of Inertia | [0.3104 0.3104 0.5757] kg m2 |
| Ls | Side Length | 40 m |
| Asail | Total Sail Area | 1600 m2 |
| γ | Initial Roll Angle | 0° |
| β | Initial Yaw Angle | 0° |
| φ | Initial Pitch Angle | 0° |
| Eo | CM/CP offset | 0.25% |
| α | Incident angle of Sun | 0° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Wang, Z.; Ikeuchi, D.; Fu, J.; Wu, X. Design and Simulation of a Flexible Bending Actuator for Solar Sail Attitude Control. Aerospace 2021, 8, 372. https://doi.org/10.3390/aerospace8120372
Liu M, Wang Z, Ikeuchi D, Fu J, Wu X. Design and Simulation of a Flexible Bending Actuator for Solar Sail Attitude Control. Aerospace. 2021; 8(12):372. https://doi.org/10.3390/aerospace8120372
Chicago/Turabian StyleLiu, Meilin, Zihao Wang, Daiki Ikeuchi, Junyu Fu, and Xiaofeng Wu. 2021. "Design and Simulation of a Flexible Bending Actuator for Solar Sail Attitude Control" Aerospace 8, no. 12: 372. https://doi.org/10.3390/aerospace8120372
APA StyleLiu, M., Wang, Z., Ikeuchi, D., Fu, J., & Wu, X. (2021). Design and Simulation of a Flexible Bending Actuator for Solar Sail Attitude Control. Aerospace, 8(12), 372. https://doi.org/10.3390/aerospace8120372