
Aircraft Flight Stabilizer System by CDM Designed Servo State-Feedback Controller

Abstract
:1. Introduction
2. Aircraft Flight Dynamics
2.1. Longitudinal Dynamics
2.2. Lateral-Directional Dynamics
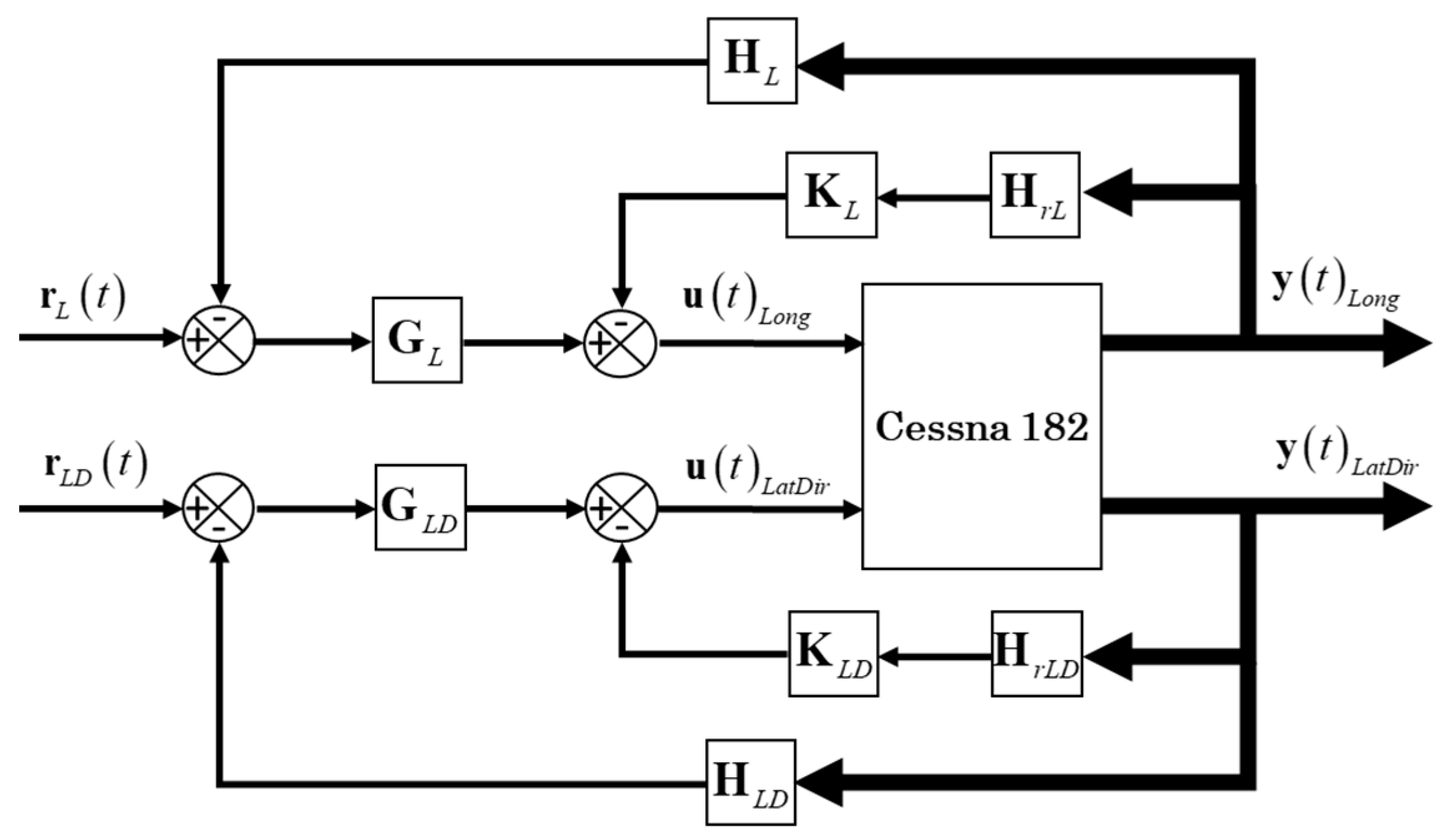
2.3. Integrated Dynamics
3. Coefficient Diagram Method and Servo State-Feedback System
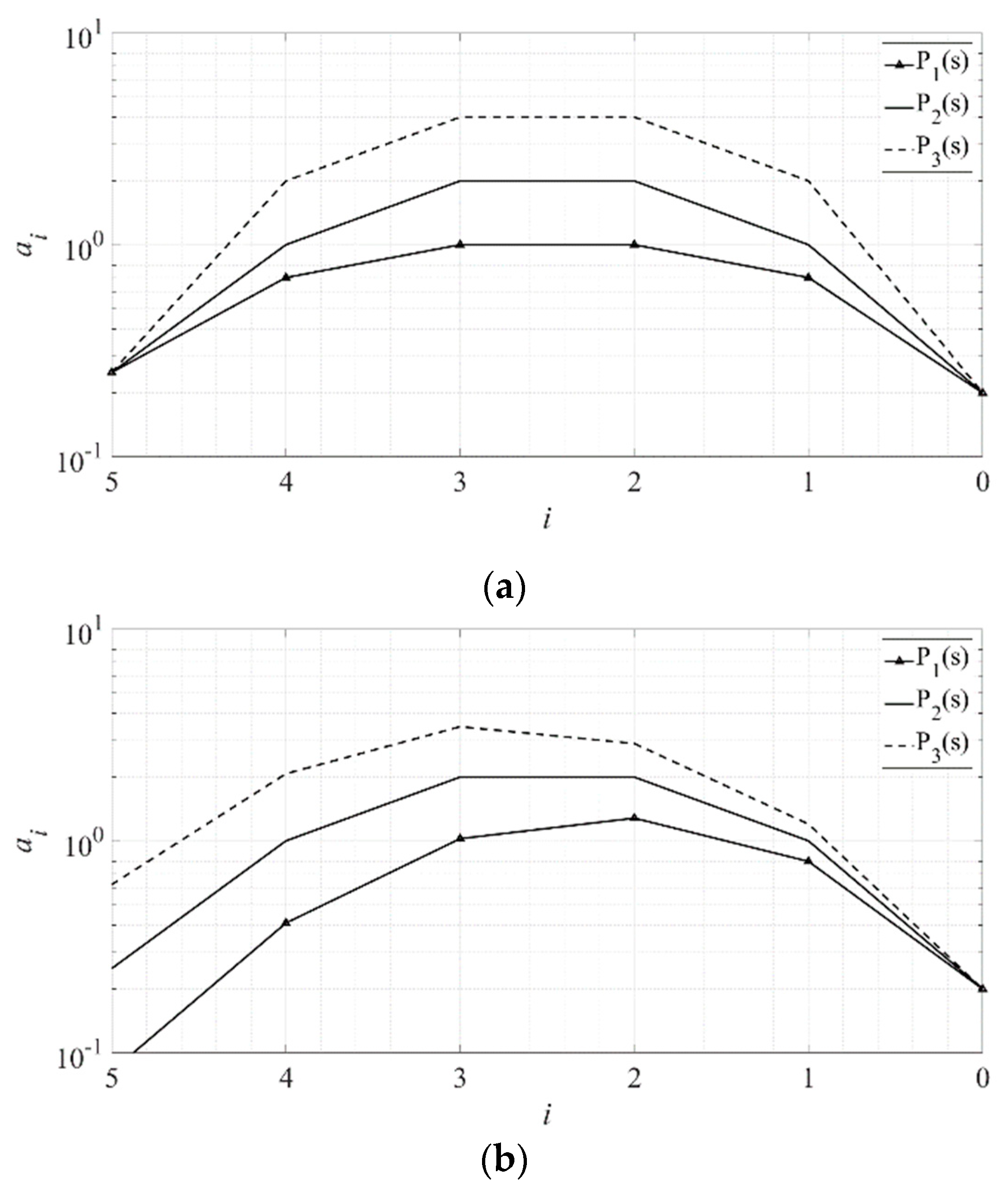
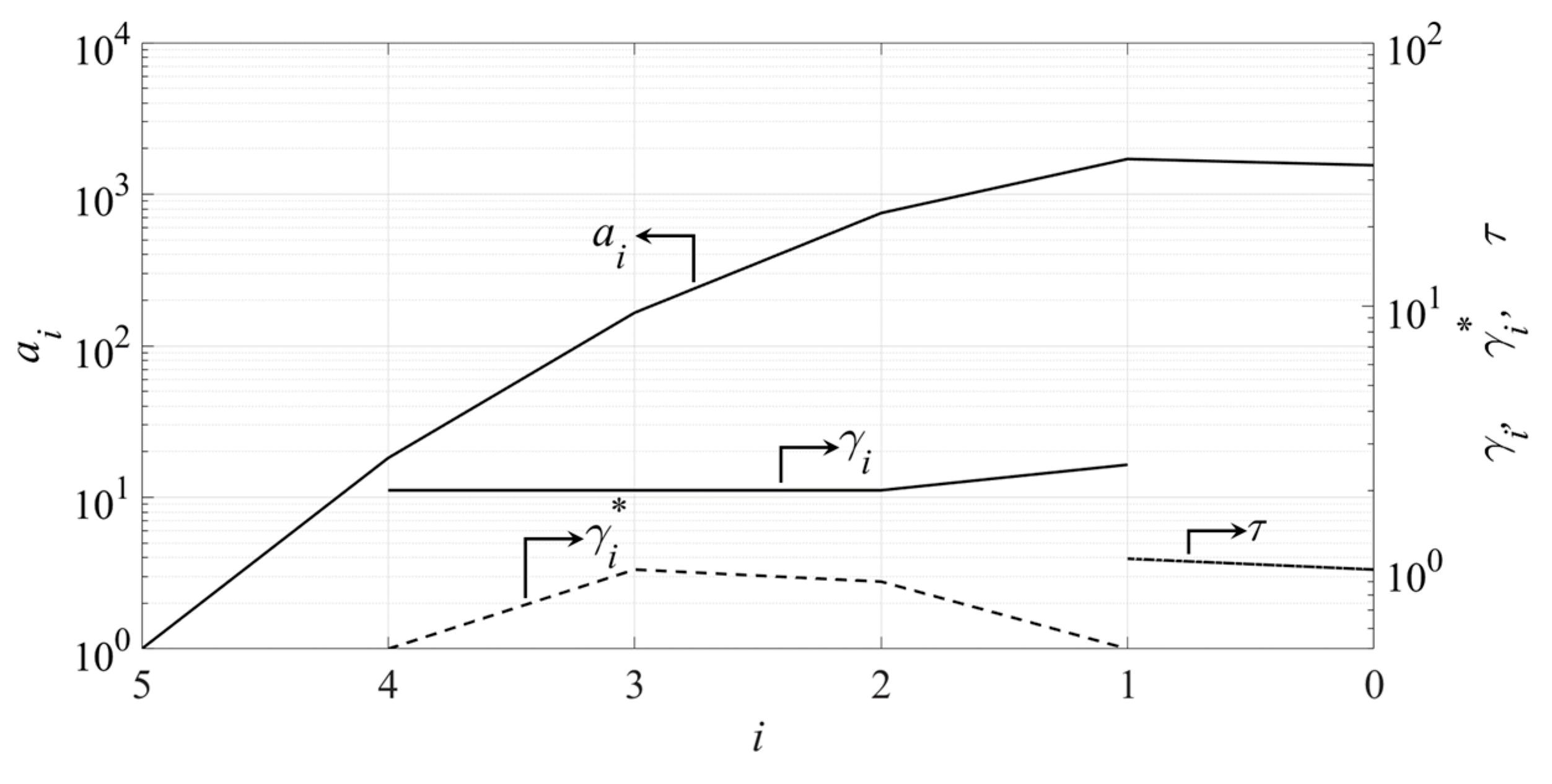
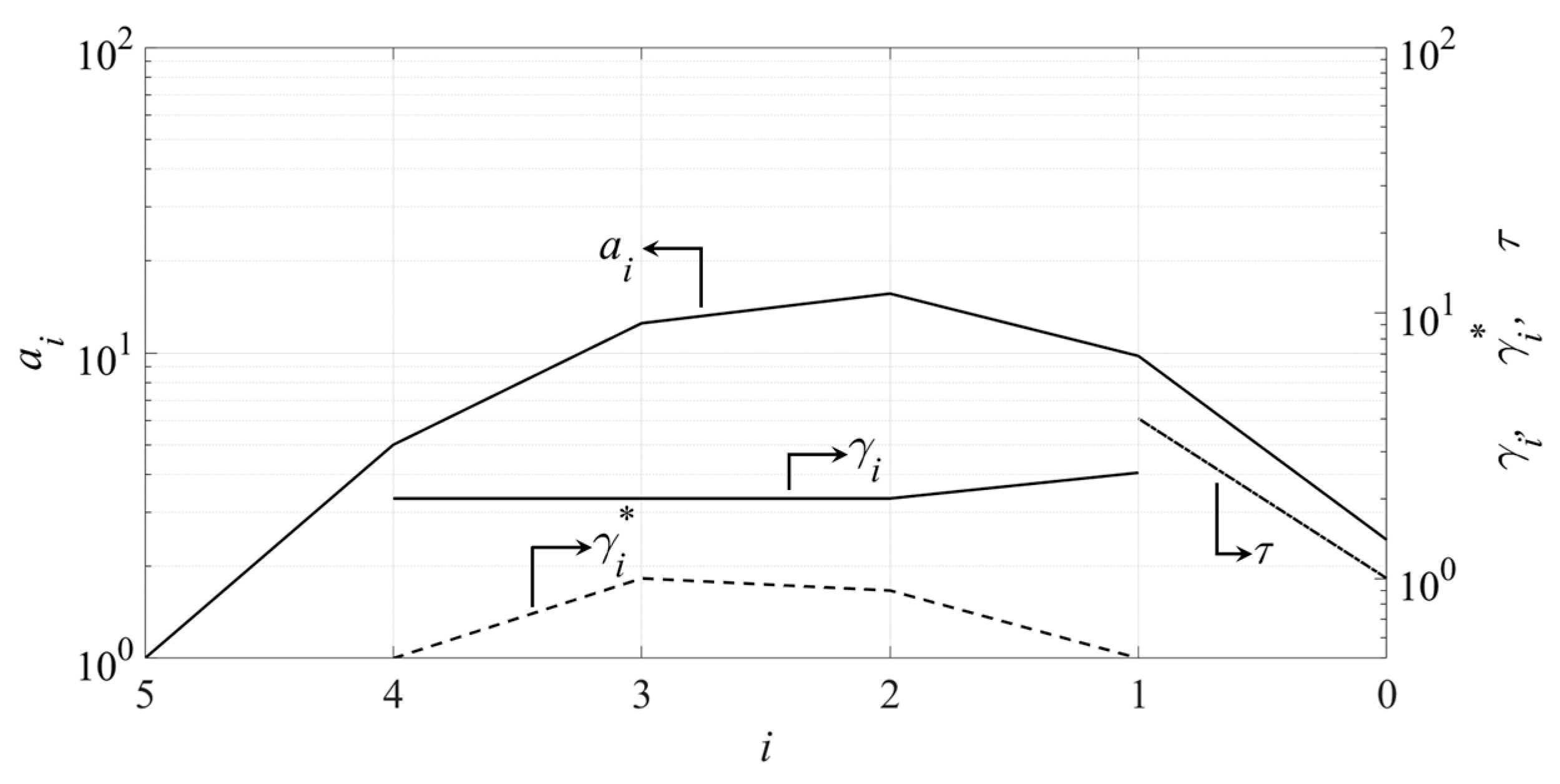
3.1. Coefficient Diagram Method
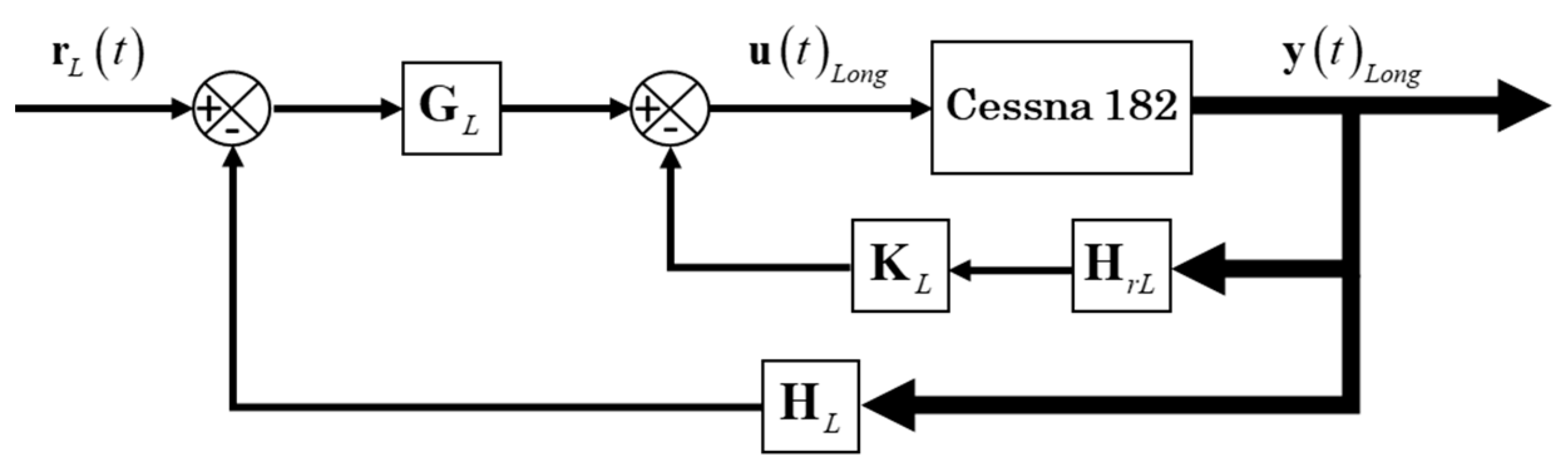
3.2. Servo State-Feedback System
- Choose the values of , and , to determine the desired CDM’s monic characteristic polynomial, Equation (4).
- Use the poles of obtained CDM’s monic characteristic polynomial to specify the eigenvalues of the matrix, and . Then use a pole placement technique to determine the values of the total servo state-feedback gain matrix, , and .
- Calculate the values of , for longitudinal dynamics, and , for lateral-directional dynamics.
- If necessary, the adjustment follows CDM’s criterion, Equations (5) and (6), until the system requirement can be met for each system.
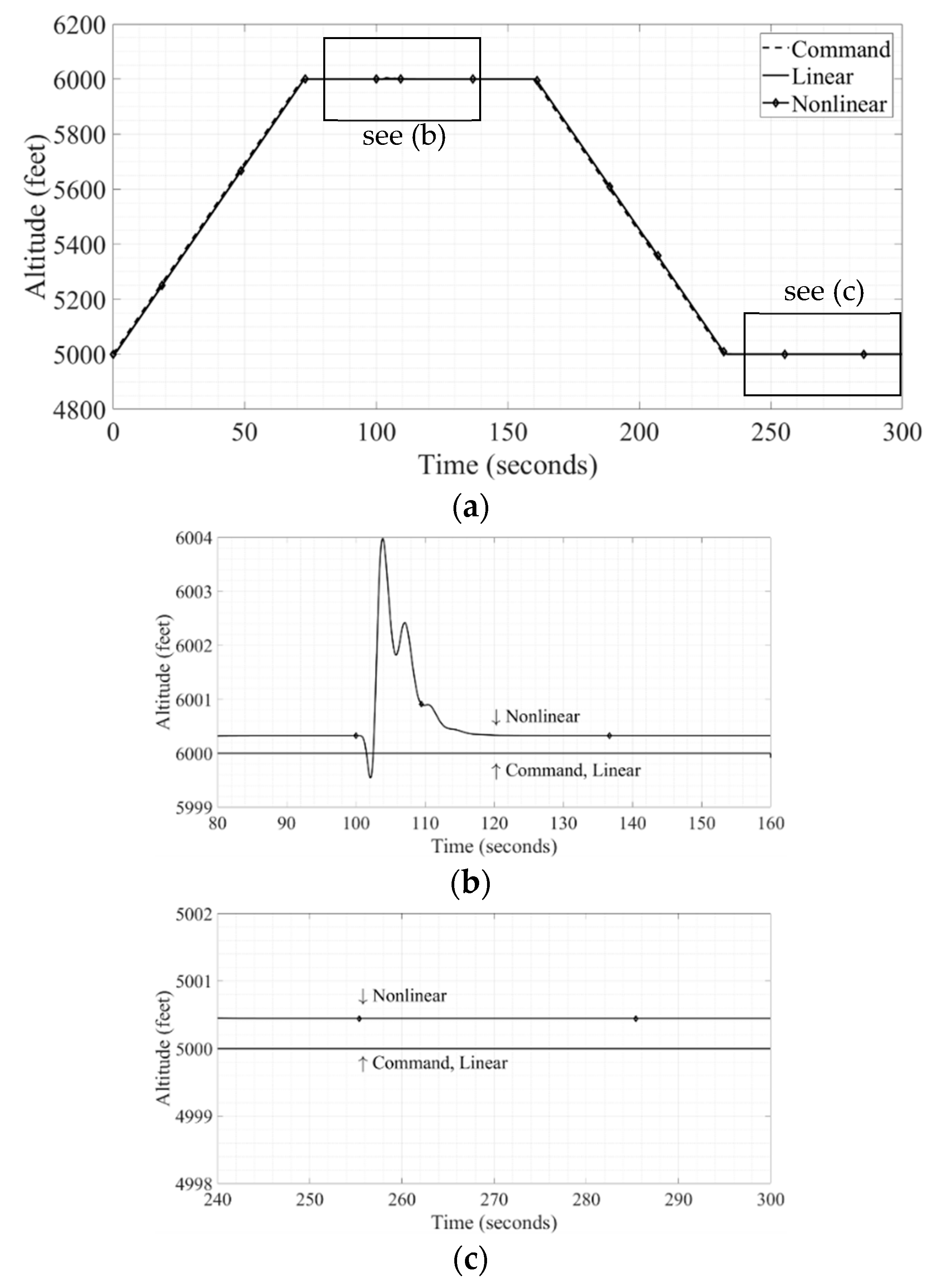
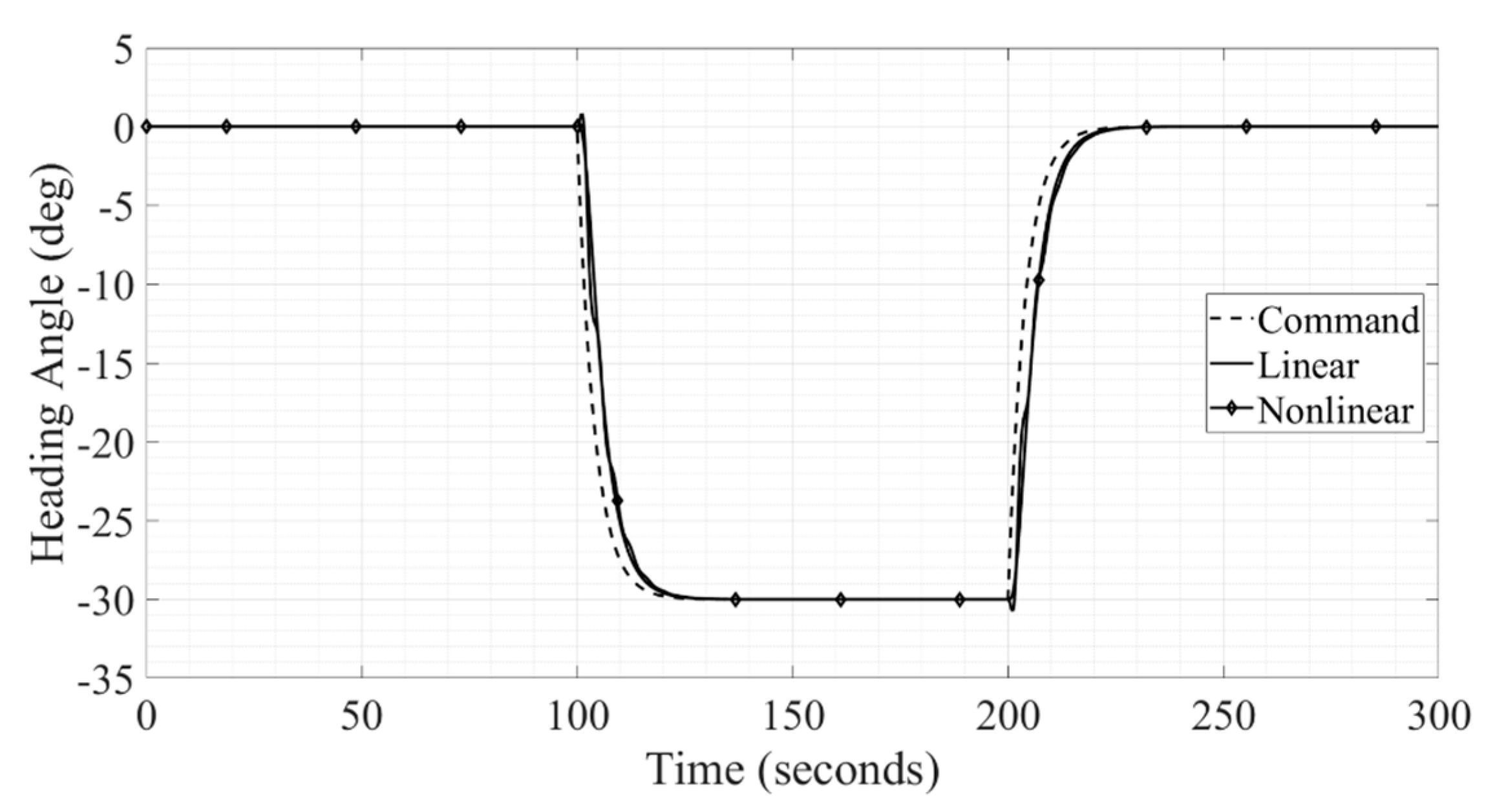
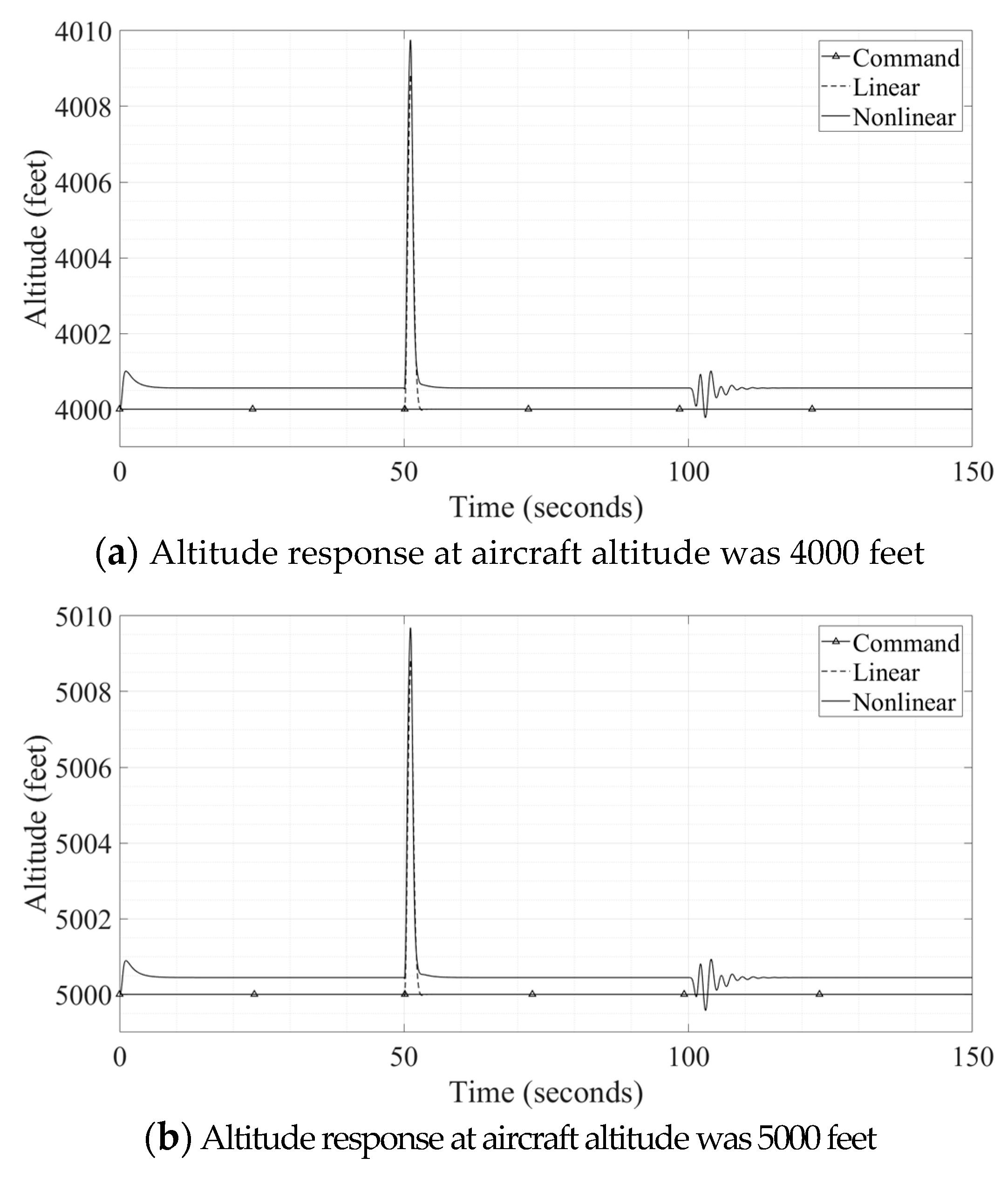
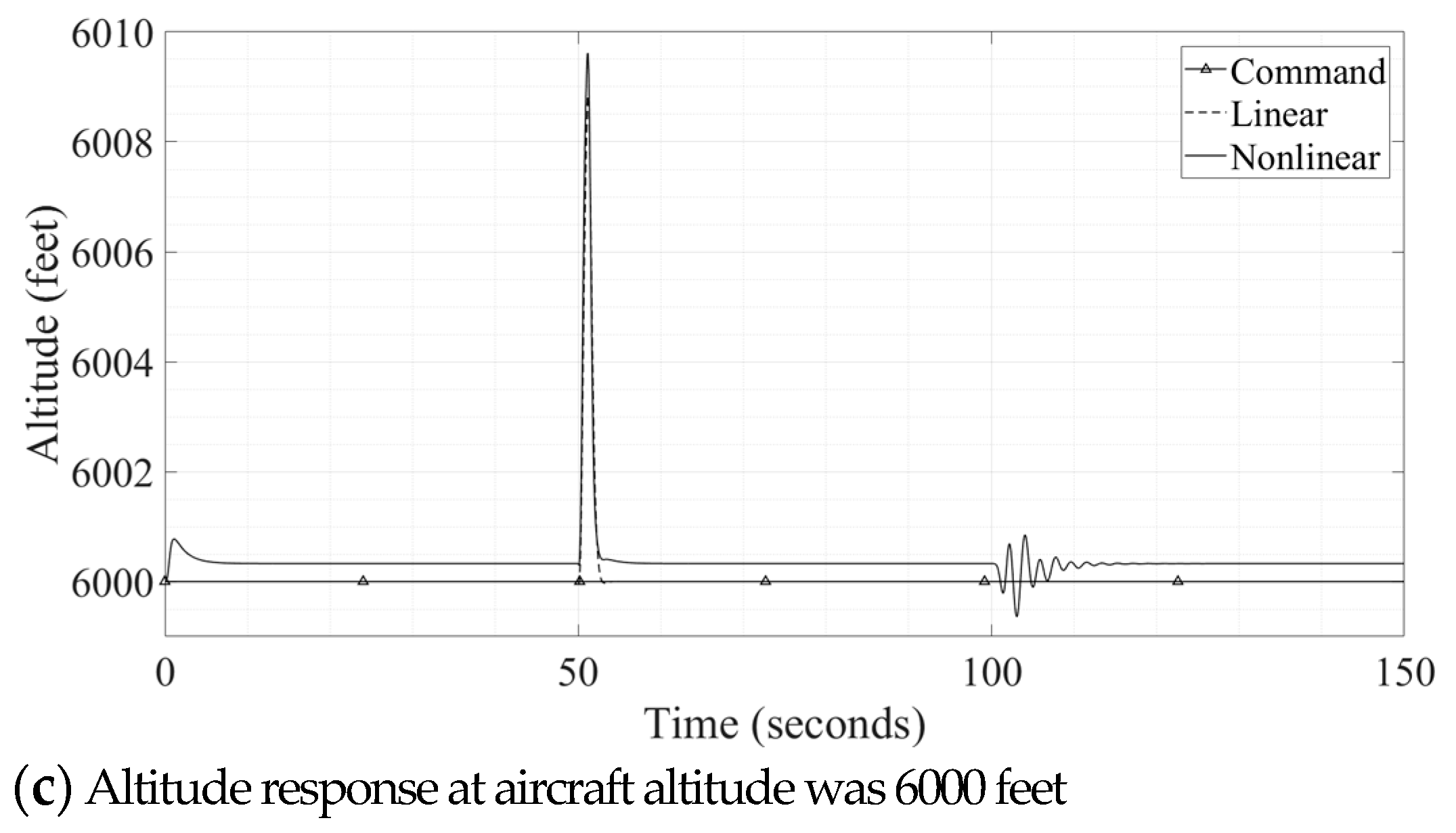
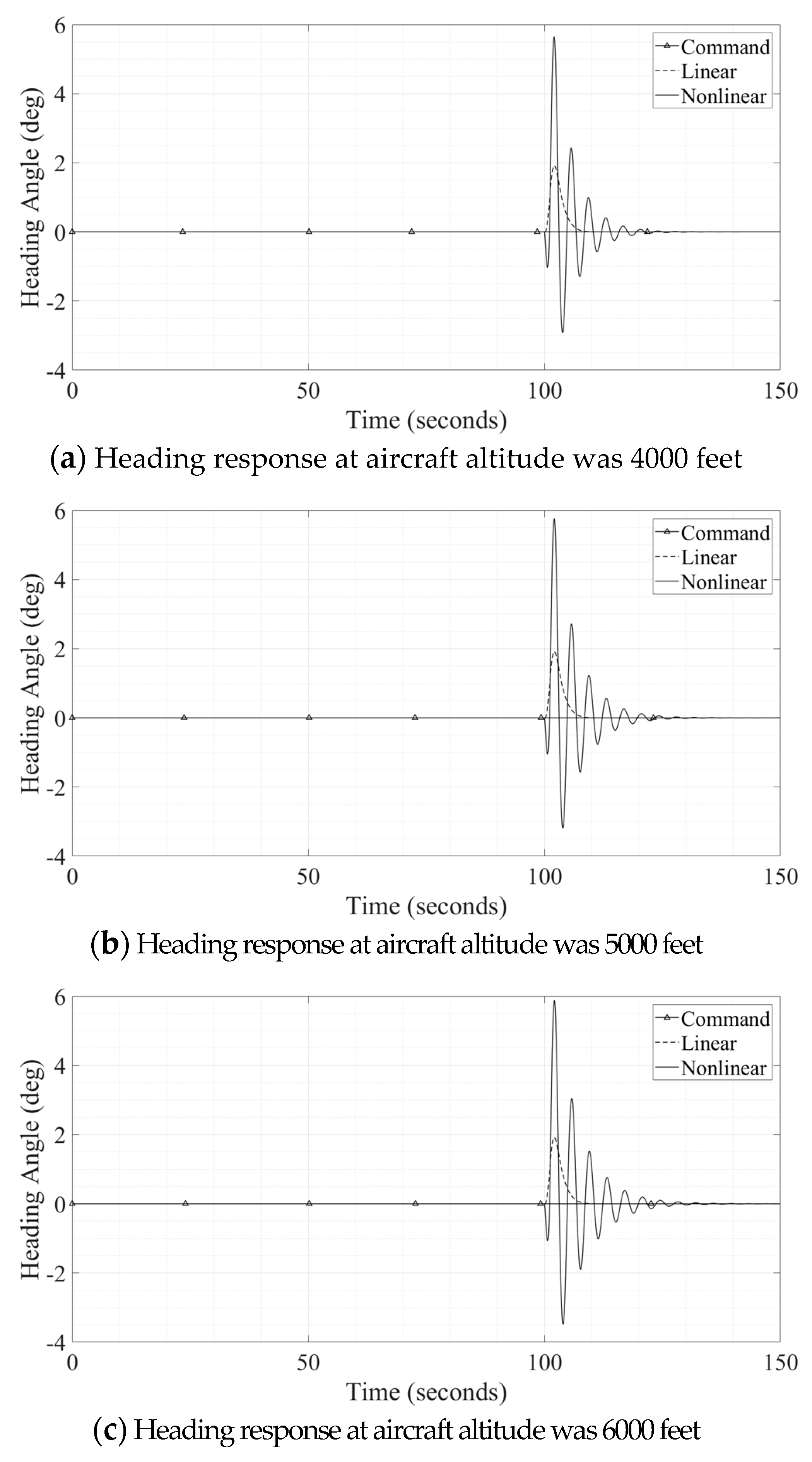
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| g | gravity acceleration, ft/sec2 |
| h | altitude, ft |
| dimensional derivative of moment | |
| p | roll angular rate, rad/sec2 |
| q | pitch angular rate, rad/sec2 |
| r | yaw angular rate, rad/sec2 |
| ts | settling time, sec |
| v | velocity, ft/sec |
| airspeed, ft/sec | |
| dimensional derivative of force | |
| angle of attack, rad | |
| sideslip angle, rad | |
| deflection of control surfaces, rad | |
| roll angle, rad | |
| stability index | |
| stability limit | |
| pitch angle, rad | |
| steady state pitch angle, rad | |
| equivalent time constant, sec | |
| yaw angle, rad | |
| Subscripts | |
| A | aileron |
| E | elevator |
| LatDir, LD | relative to the lateral-directional dynamics |
| Long, L | relative to the longitudinal dynamics |
| rL | reduce matrix of the longitudinal dynamics |
| rLD | reduce matrix of the lateral-directional dynamics |
| R | rudder |
| T | thrust |
References
- Smith, G.; Meyer, G. Aircraft Automatic Flight Control System with Model Inversion. J. Guid. 1987, 10, 269–275. [Google Scholar] [CrossRef]
- Guo, J.; Tang, S. Application of the feedback decoupling method in the attitude control of the rolling aircraft. In Proceedings of the 2012 International Conference on Systems and Informatics (ICSAI2012), Yantai, China, 19–20 May 2012; pp. 371–375. [Google Scholar]
- Zolotukhin, Y.N.; Nesterov, A.A. Aircraft attitude control. Optoelectron. Instrum. Data Process. 2015, 51, 456–461. [Google Scholar] [CrossRef]
- Deepa, S.; Sudha, G. Longitudinal control of aircraft dynamics based on optimization of PID parameters. Thermophys. Aeromech. 2016, 23, 185–194. [Google Scholar] [CrossRef]
- Shan, S.; Hou, Z.; Wang, W. Aircraft longitudinal decoupling based on a singular perturbation approach. Adv. Mech. Eng. 2017, 9, 1–8. [Google Scholar] [CrossRef]
- Asa, E.; Yamamoto, Y.; Benjanarasuth, T. Aircraft Altitude Control Based on CDM. In Proceedings of the 2019 IEEE 2nd International Conference on Information and Computer Technologies (ICICT), Kahului, HI, USA, 14–17 March 2019; Volume 14, pp. 266–269. [Google Scholar]
- Asa, E.; Yamamoto, Y. Aircraft Heading Hold Control Based on CDM. In Proceedings of the 2019 19th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 15–18 October 2019; pp. 247–250. [Google Scholar]
- Asa, E.; Yamamoto, Y. CDM based Controller design for Stabilizing the Altitude and Heading of an Aircraft. In Proceedings of the 2019 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Bangkok, Thailand, 18–20 November 2019; pp. 144–148. [Google Scholar]
- Marcello, R. Aircraft Dynamics from Modeling to Simulation; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2012; Chapters 3, 4, 8; Appendix B; pp. 586–588. [Google Scholar]
- David, K. Schmidt, Modern Flight Dynamics; McGraw-Hill, Inc.: New York, NN, USA, 2012; Chapters 8, 12. [Google Scholar]
- Manabe, S. Coefficient Diagram Method. IFAC Proc. Vol. 1998, 31, 211–222. [Google Scholar] [CrossRef]
- Asa, E.; Benjanarasuth, T.; Ngamwiwit, J.; Komine, N. Hybrid controller for swinging up and stabilizing the inverted pendulum on cart. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Korea, 14–17 October 2008; pp. 2504–2507. [Google Scholar]
- Ocal, O.; Bir, A.; Tibken, B. Digital design of Coefficient Diagram Method. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–21 June 2009; Volume 10, pp. 2849–2854. [Google Scholar]
- Manabe, S. Application of Coefficient Diagram Method to Mimo Design in Aerospace. In IFAC Proceedings Volumes; Elsevier BV: Amsterdam, The Netherlands, 2002; Volume 35, pp. 43–48. [Google Scholar]
- Hirokawa, R.; Sato, K.; Manabe, S. Autopilot design for a missile with reaction-jet using coefficient diagram method. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Montreal, QC, Canada, 6–9 August 2001. [Google Scholar]
- Ogata, K.; Brewer, J.W. Modern Control Engineering. J. Dyn. Syst. Meas. Control 1971, 93, 63. [Google Scholar] [CrossRef]
- Campa, G. Airlib, MATLAB Central File Exchange. Available online: http://www.mathworks.com/matlabcentral/fileexchange/3019-airlib (accessed on 27 January 2020).
- Rauw, M.O. FDC 1.2—A Simulink Toolbox for Flight Dynamics and Control Analysis, 2nd ed.; May 2001. Available online: http://www.dutchroll.sourceforge.net (accessed on 4 February 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cessna 182 | Symbol | Value |
|---|---|---|
| Wing surface (ft2) | 174 | |
| MAC (ft) | 4.9 | |
| Wingspan (ft) | 36 |
| Symbol | Cruise | |
|---|---|---|
| Altitude (ft) | 5000 | |
| Mach number | 0.201 | |
| Airspeed (ft/sec) | 220.1 | |
| Dynamic Pressure (lbs/ft2) | 49.6 | |
| CG -%MAC | 0.264 | |
| AOA (deg) | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asa, E.; Yamamoto, Y. Aircraft Flight Stabilizer System by CDM Designed Servo State-Feedback Controller. Aerospace 2021, 8, 45. https://doi.org/10.3390/aerospace8020045
Asa E, Yamamoto Y. Aircraft Flight Stabilizer System by CDM Designed Servo State-Feedback Controller. Aerospace. 2021; 8(2):45. https://doi.org/10.3390/aerospace8020045
Chicago/Turabian StyleAsa, Ekachai, and Yoshio Yamamoto. 2021. "Aircraft Flight Stabilizer System by CDM Designed Servo State-Feedback Controller" Aerospace 8, no. 2: 45. https://doi.org/10.3390/aerospace8020045
APA StyleAsa, E., & Yamamoto, Y. (2021). Aircraft Flight Stabilizer System by CDM Designed Servo State-Feedback Controller. Aerospace, 8(2), 45. https://doi.org/10.3390/aerospace8020045