
Numerical Investigation of an Optimized Rotor Head Fairing for the RACER Compound Helicopter in Cruise Flight



Abstract
:1. Introduction
2. Numerical Setup
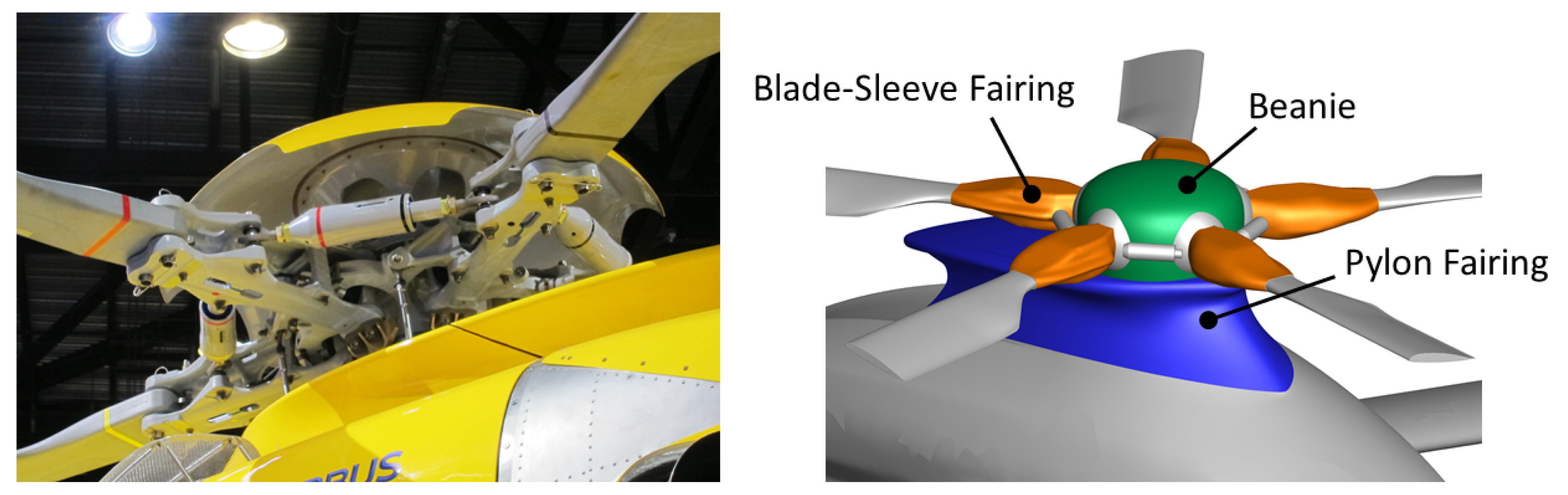
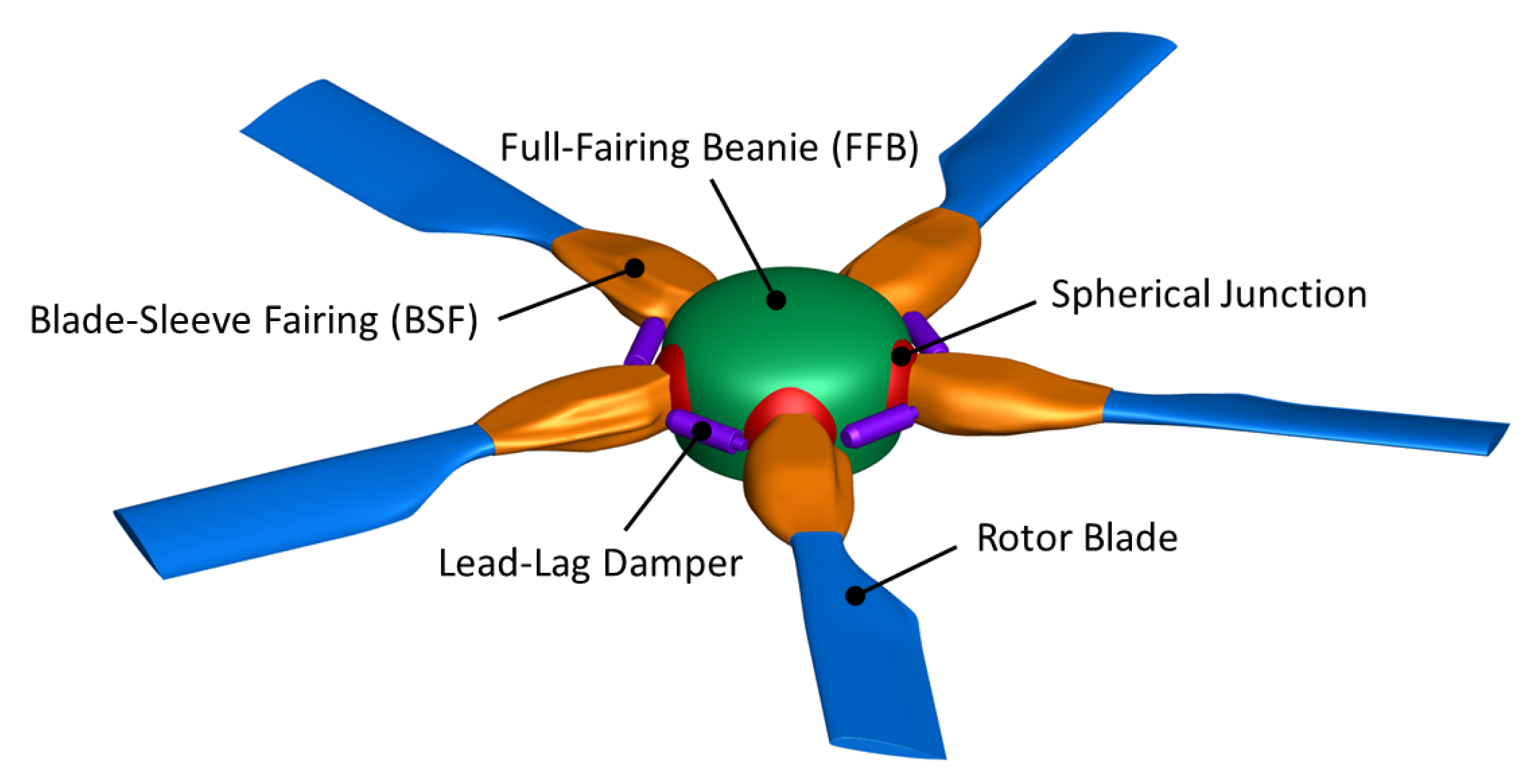
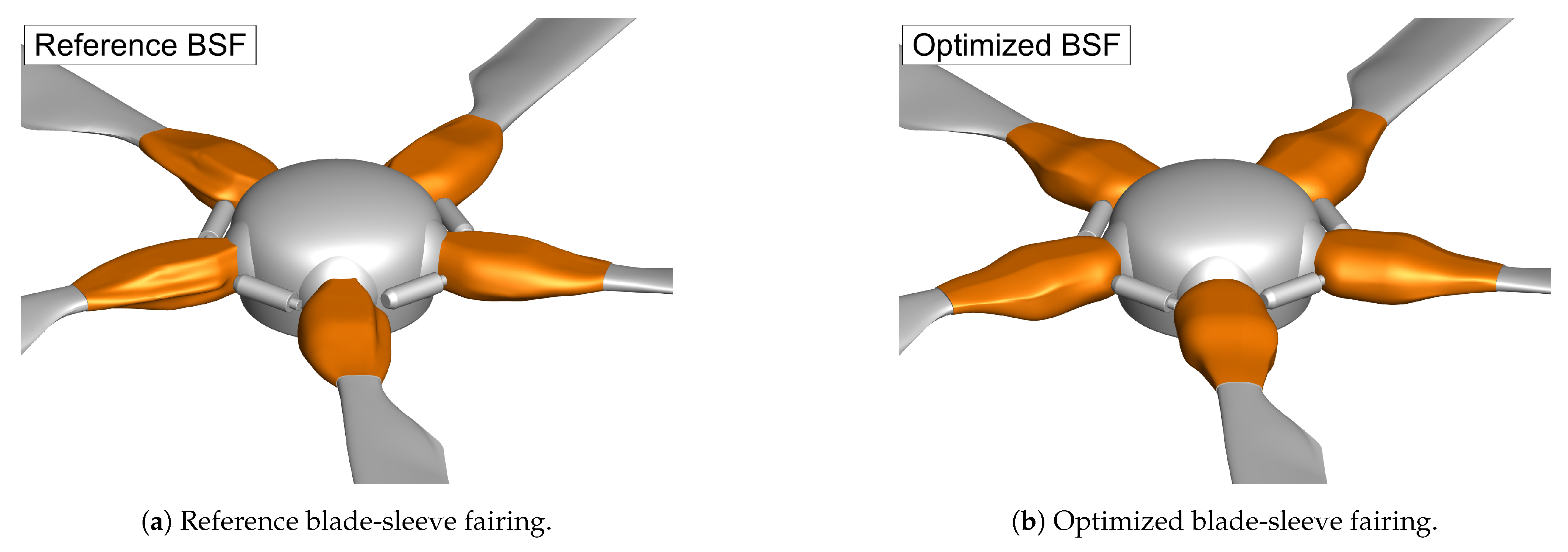
2.1. Model
2.2. Mesh Generation
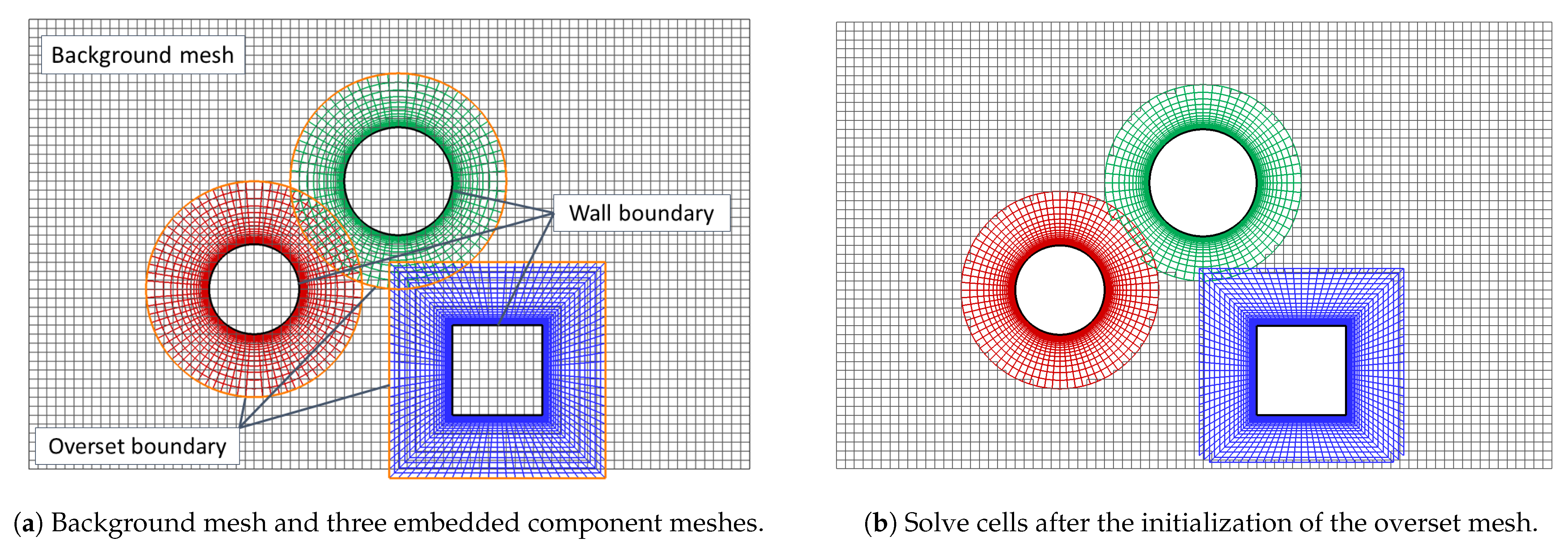
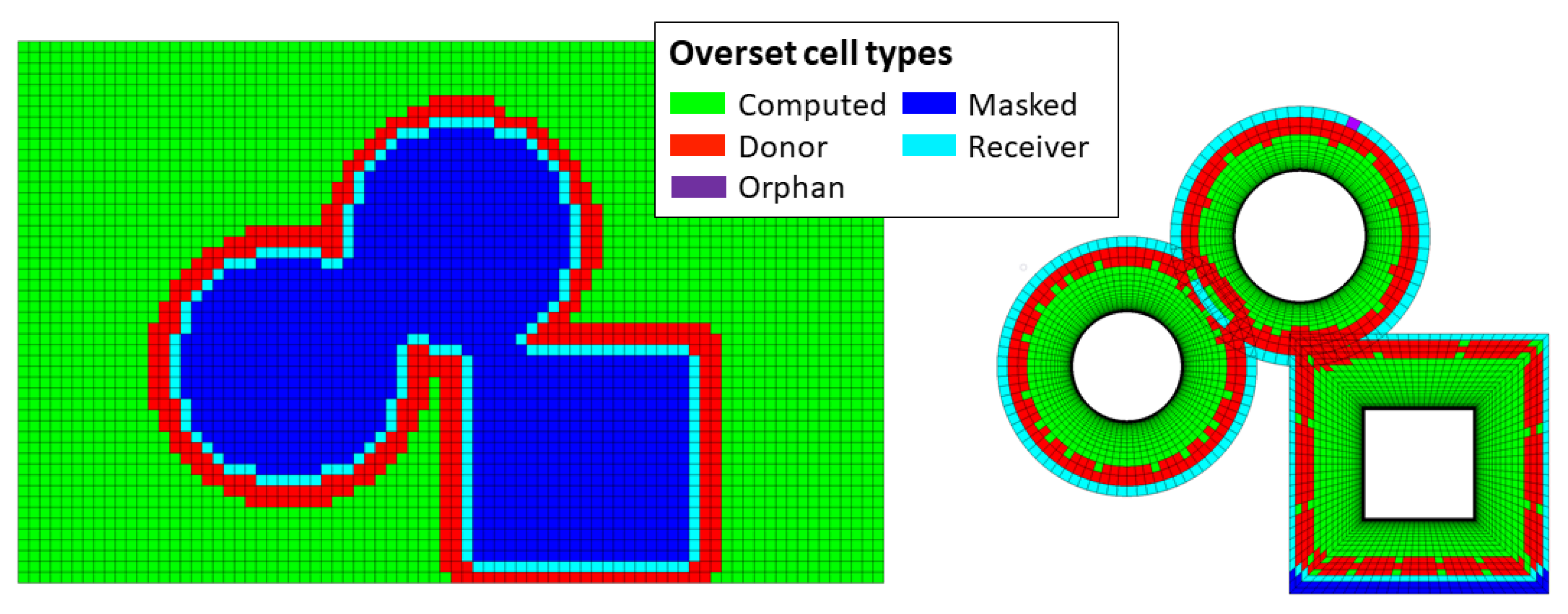
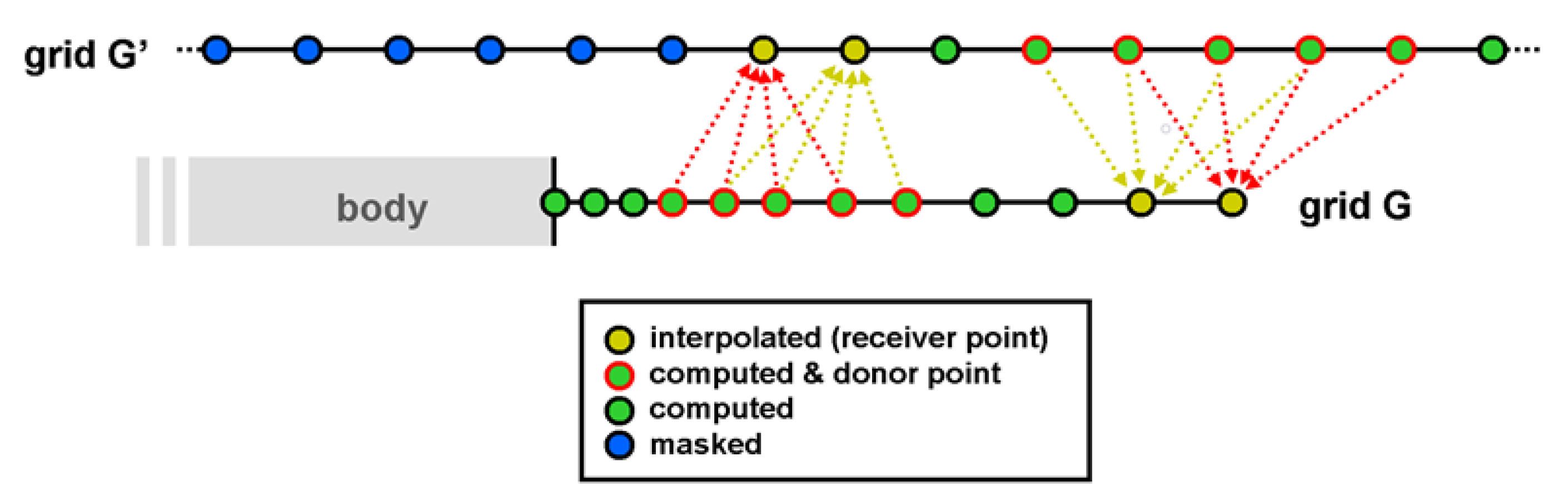
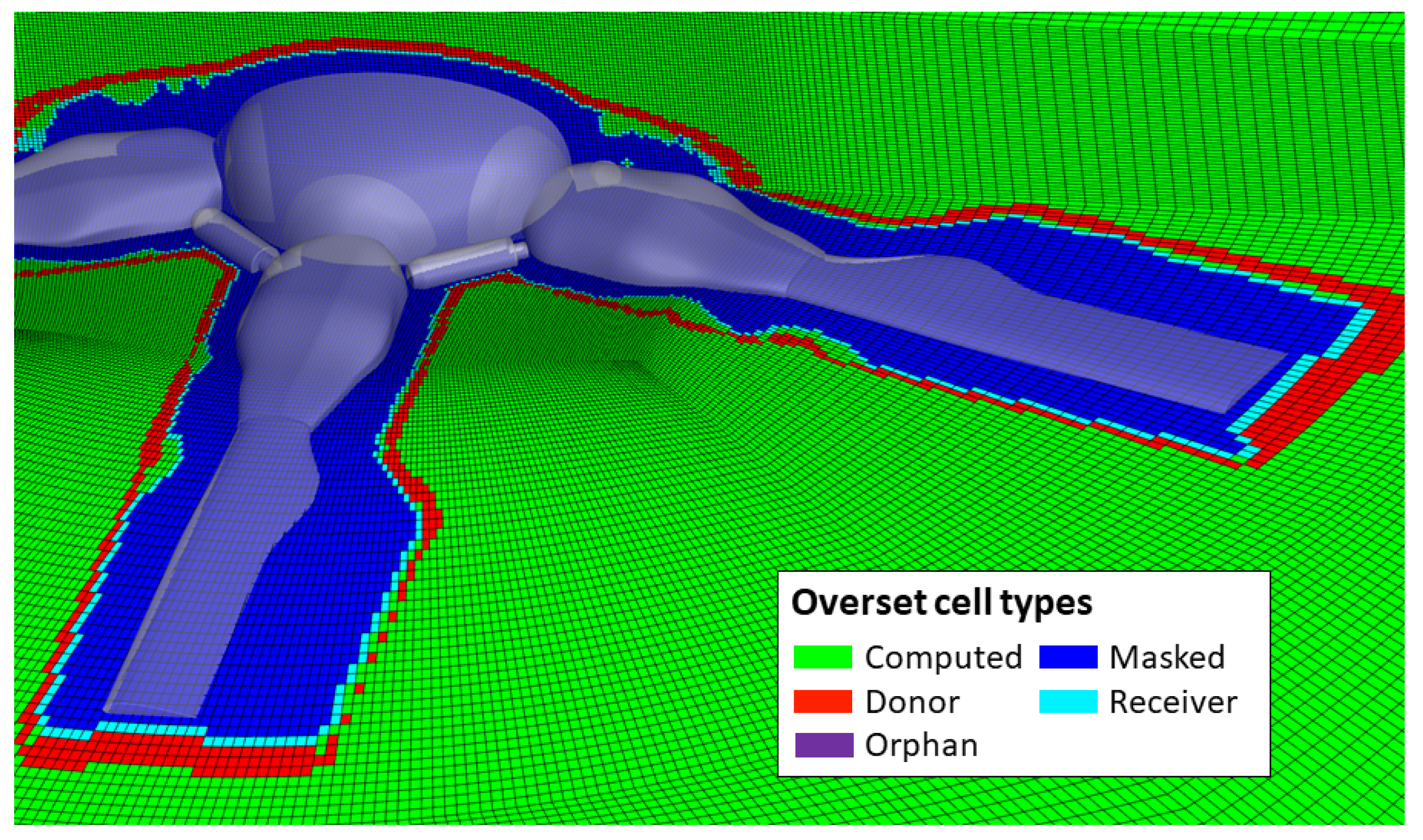
2.2.1. Overset Mesh Interpolation
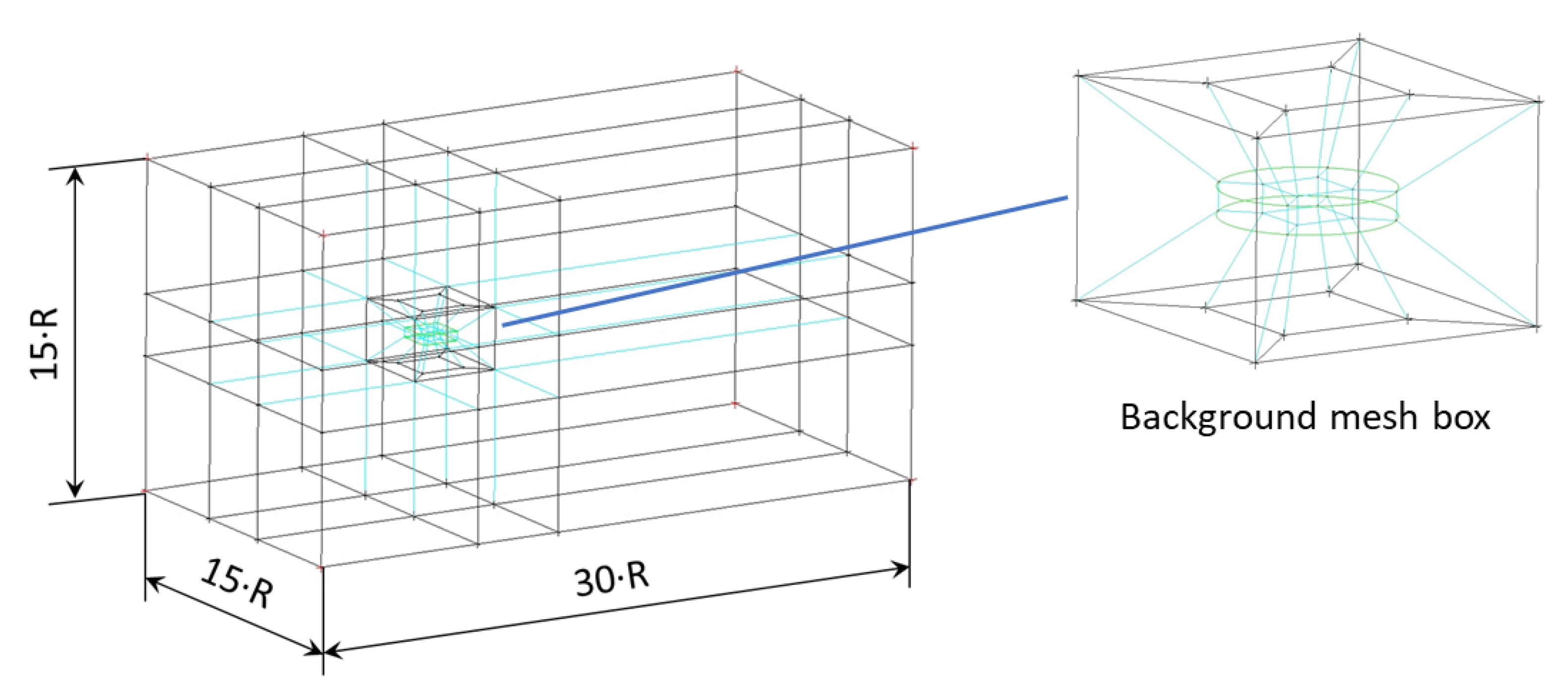
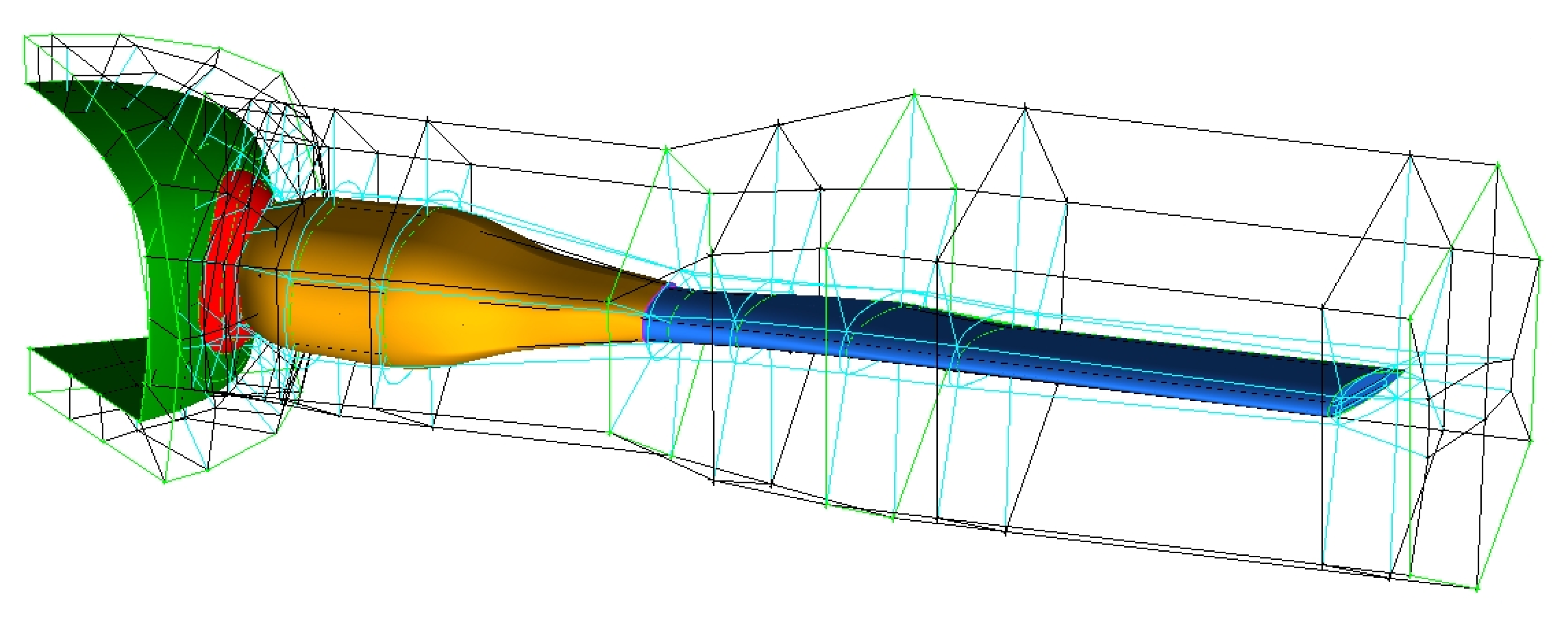
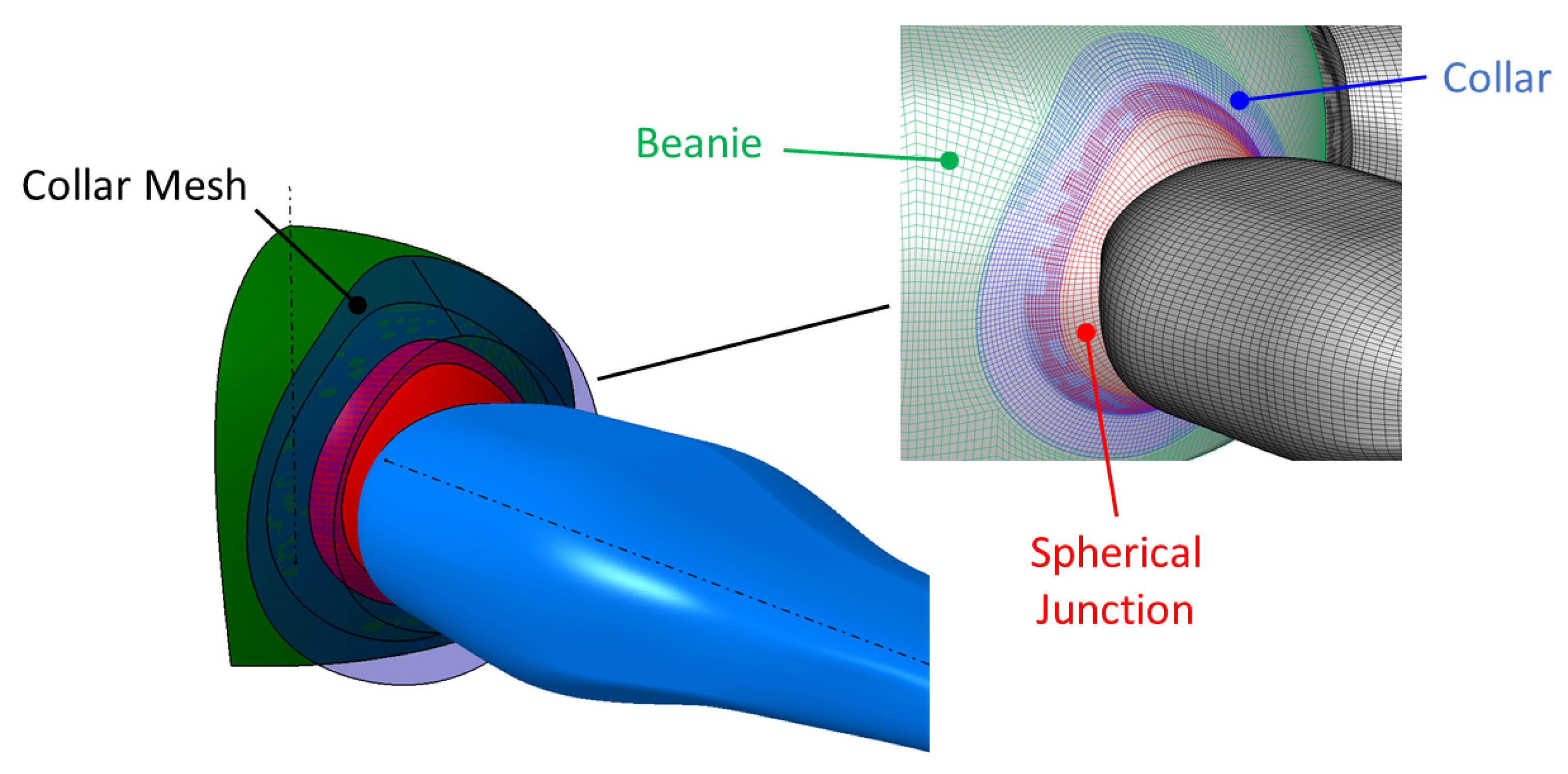
2.2.2. Computational Grid
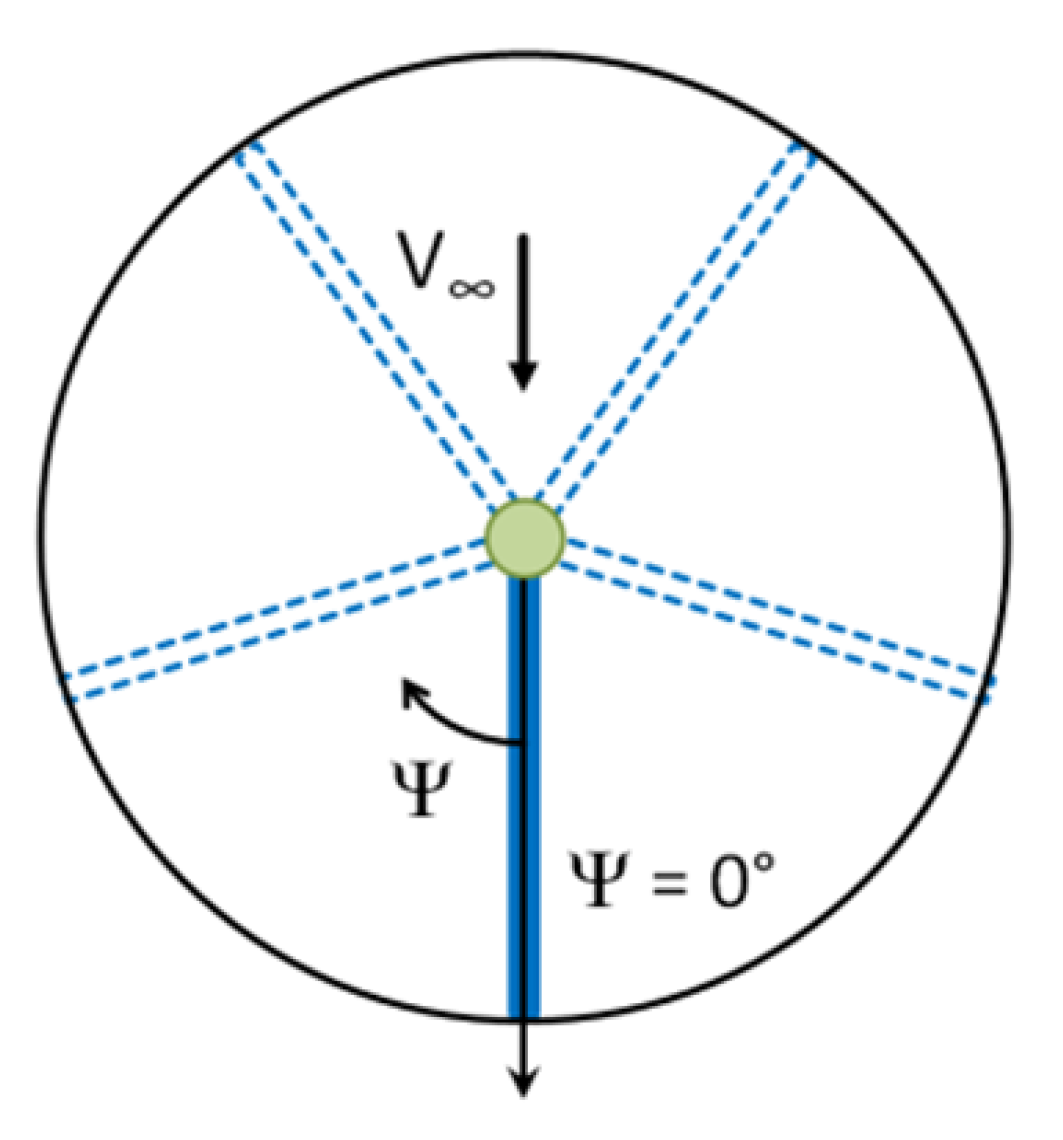
2.3. Blade Pitch Movement
2.4. Flow Solver
2.5. Computational Performance
3. Results
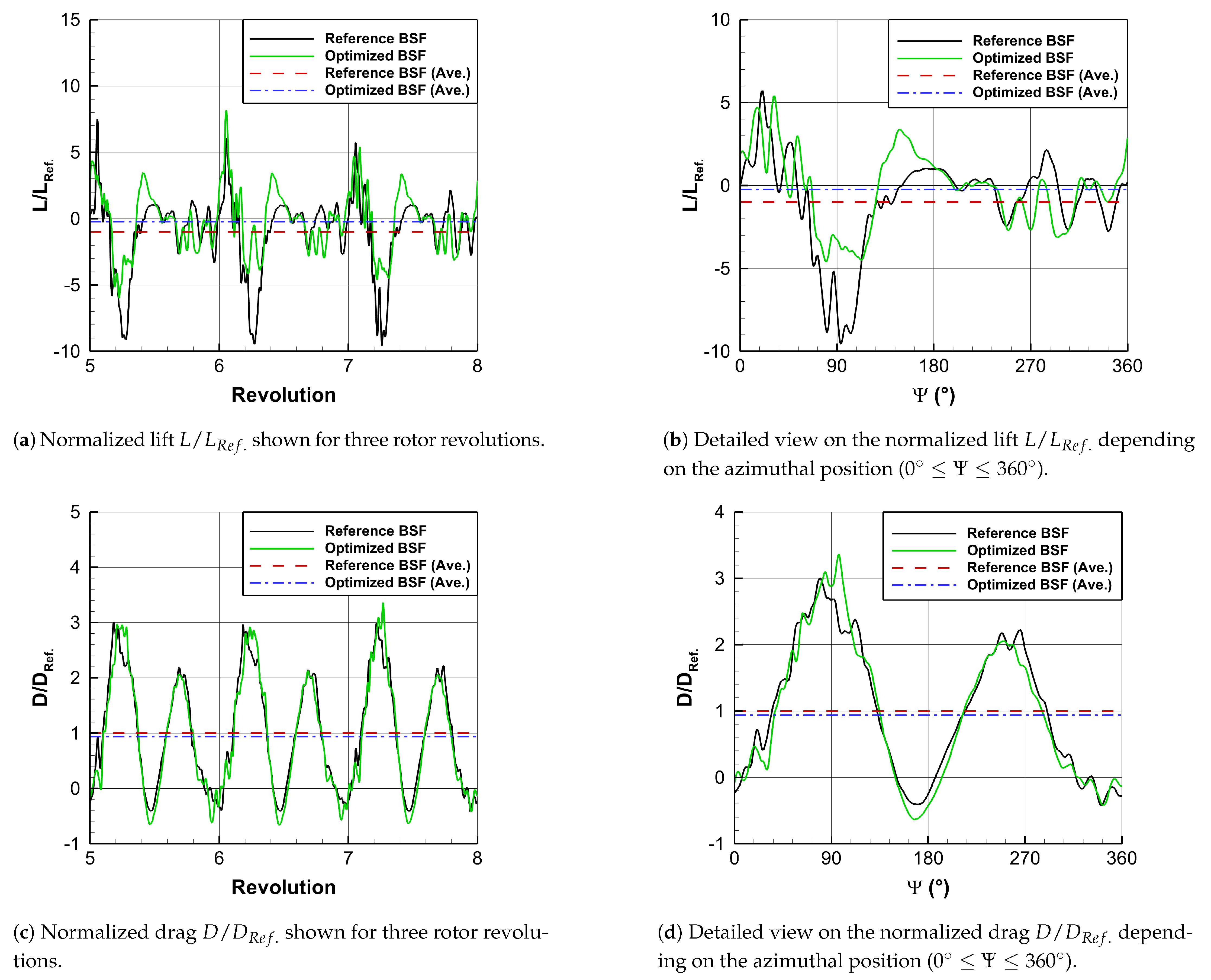
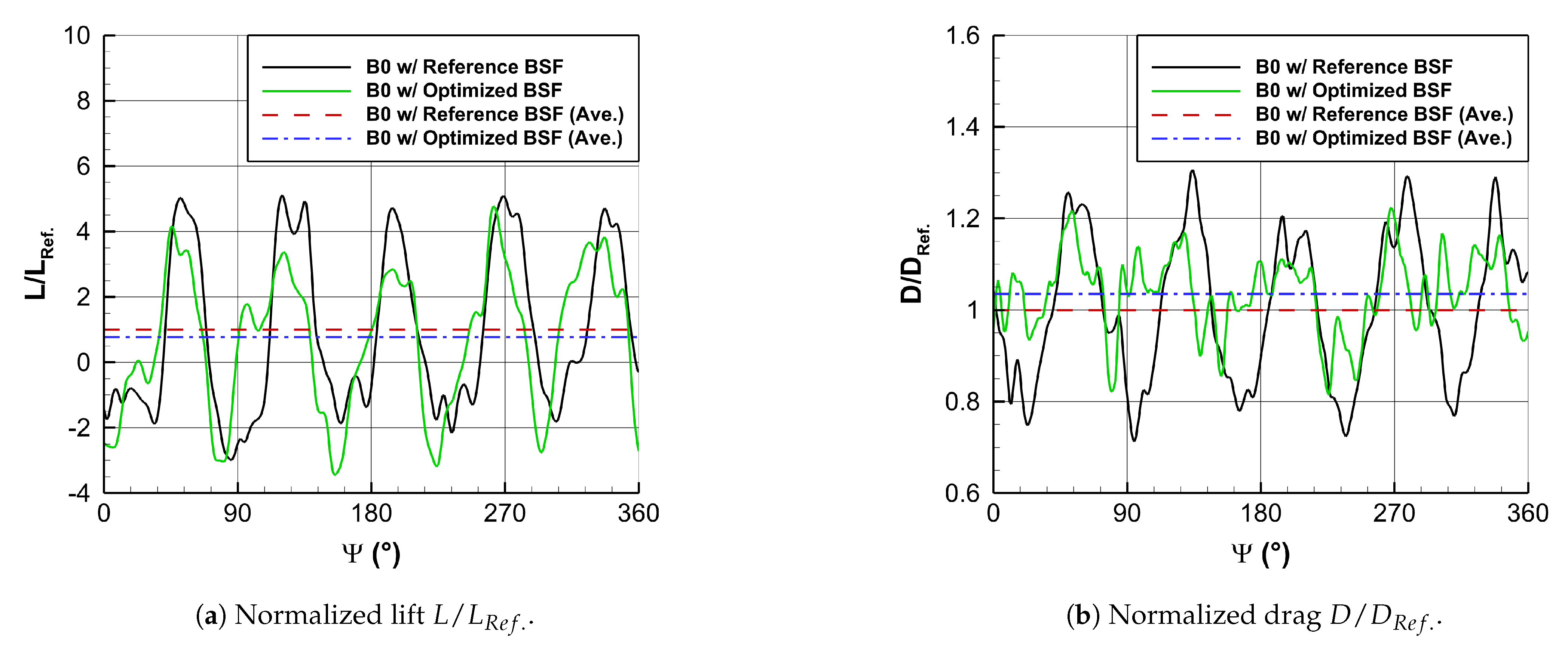
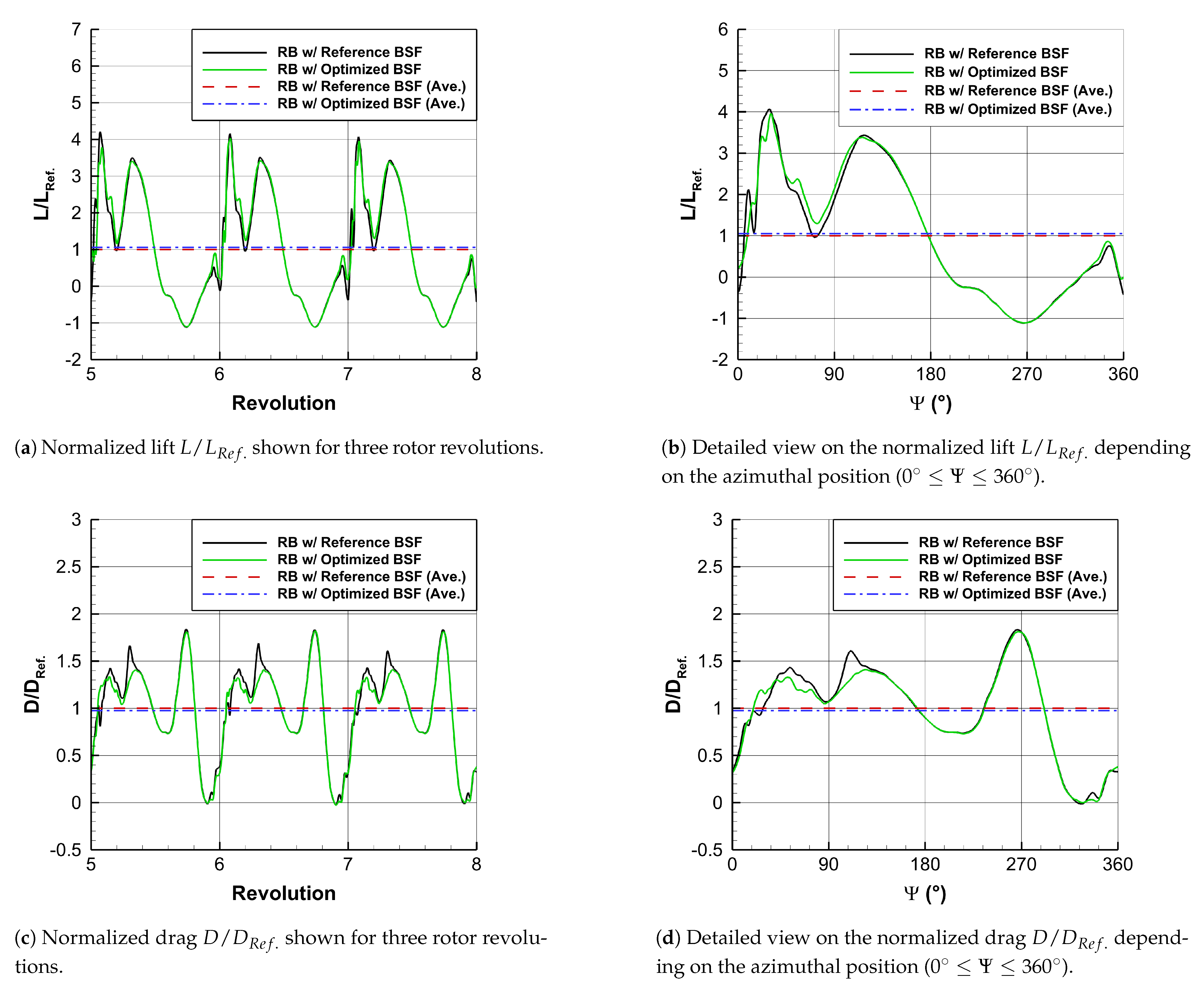
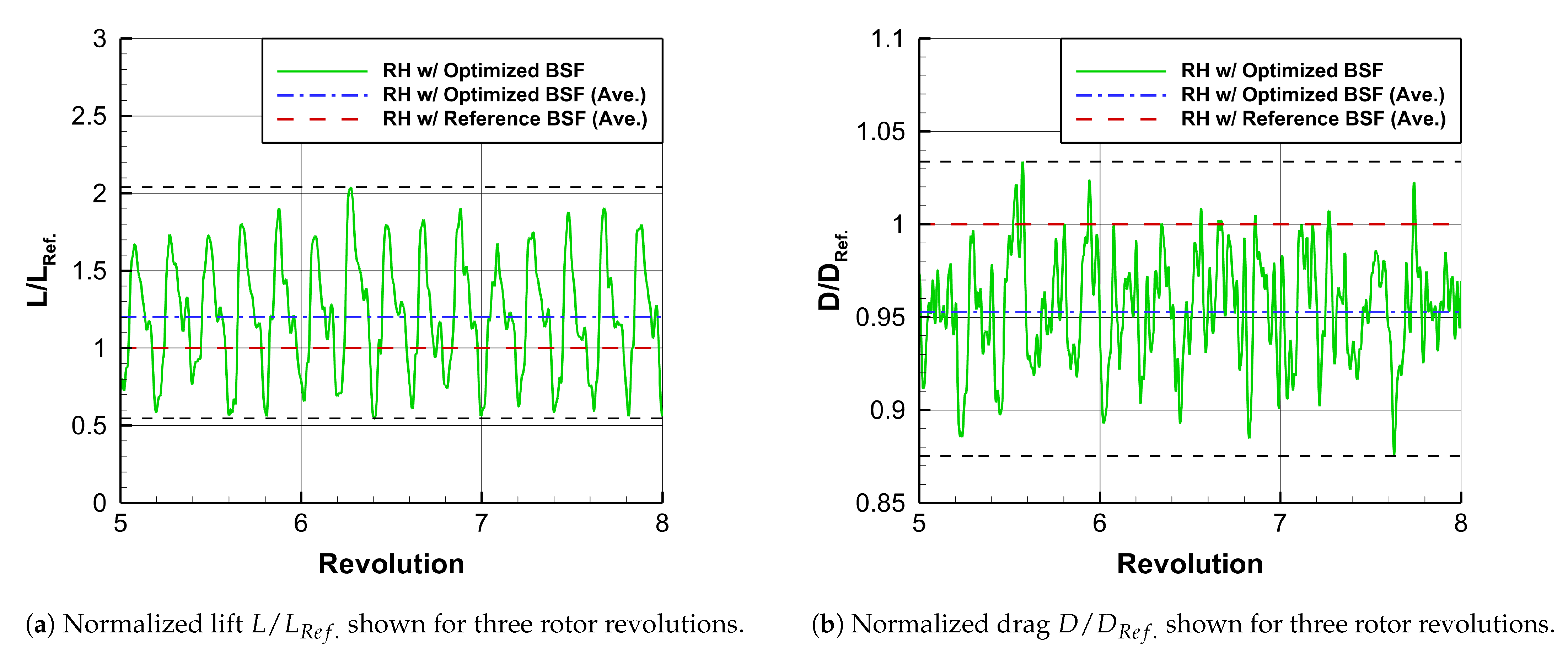
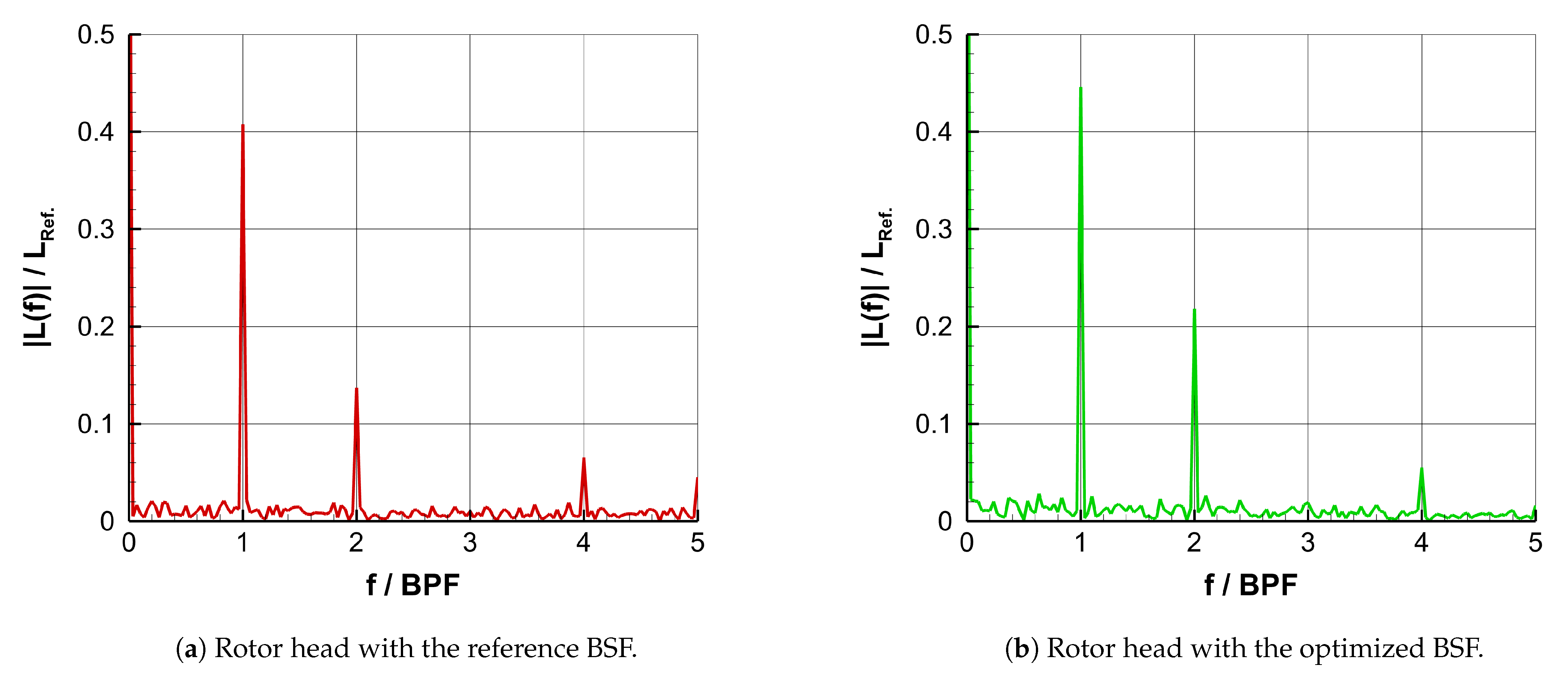
3.1. Aerodynamic Forces of the Isolated Rotor Head
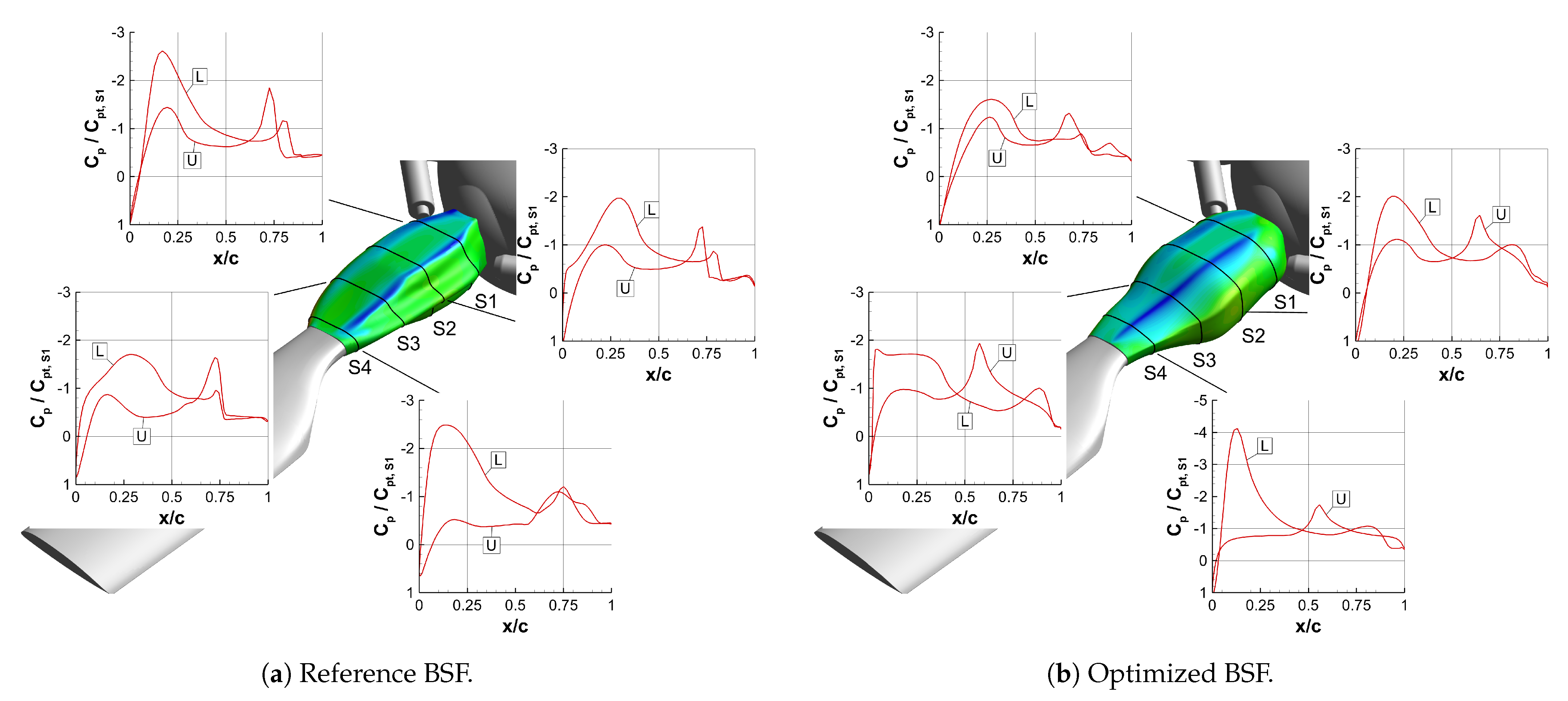
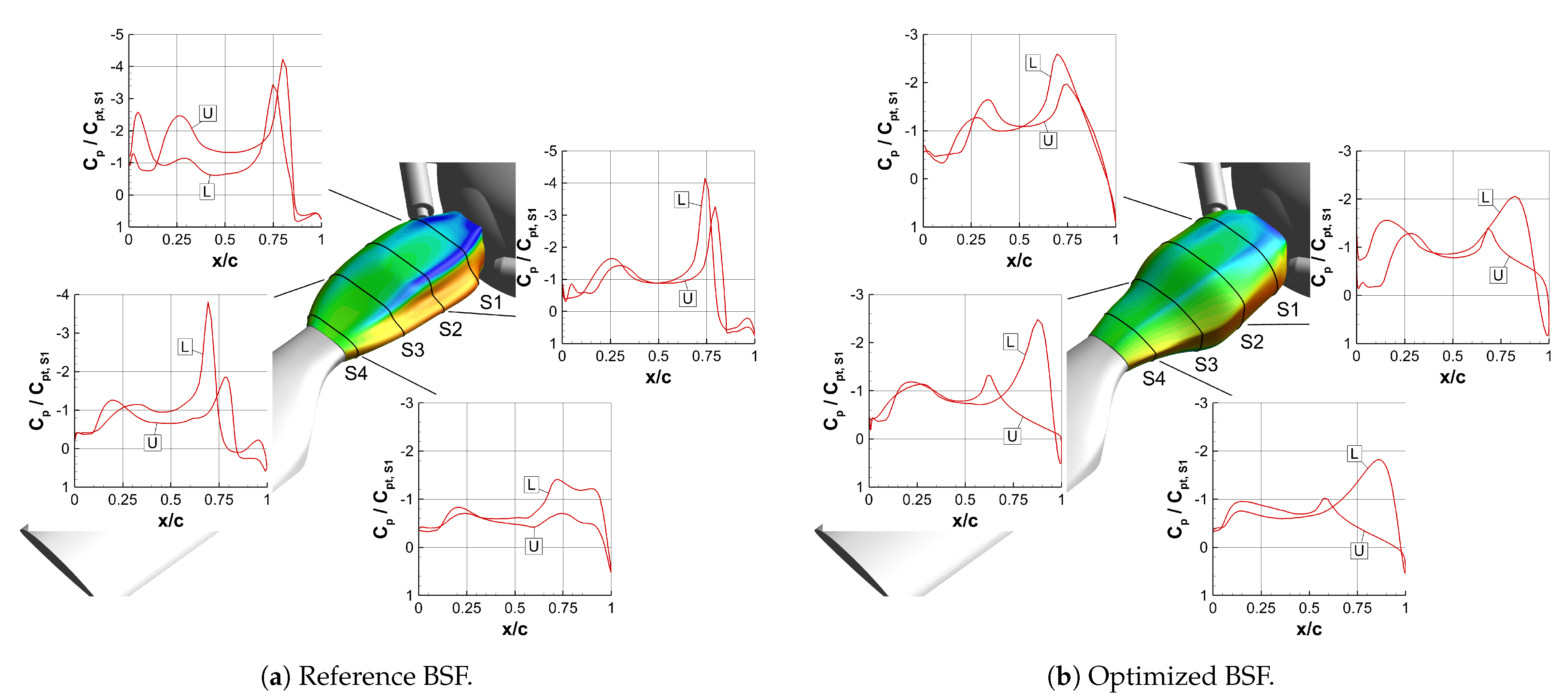
3.2. Surface Pressure Distribution
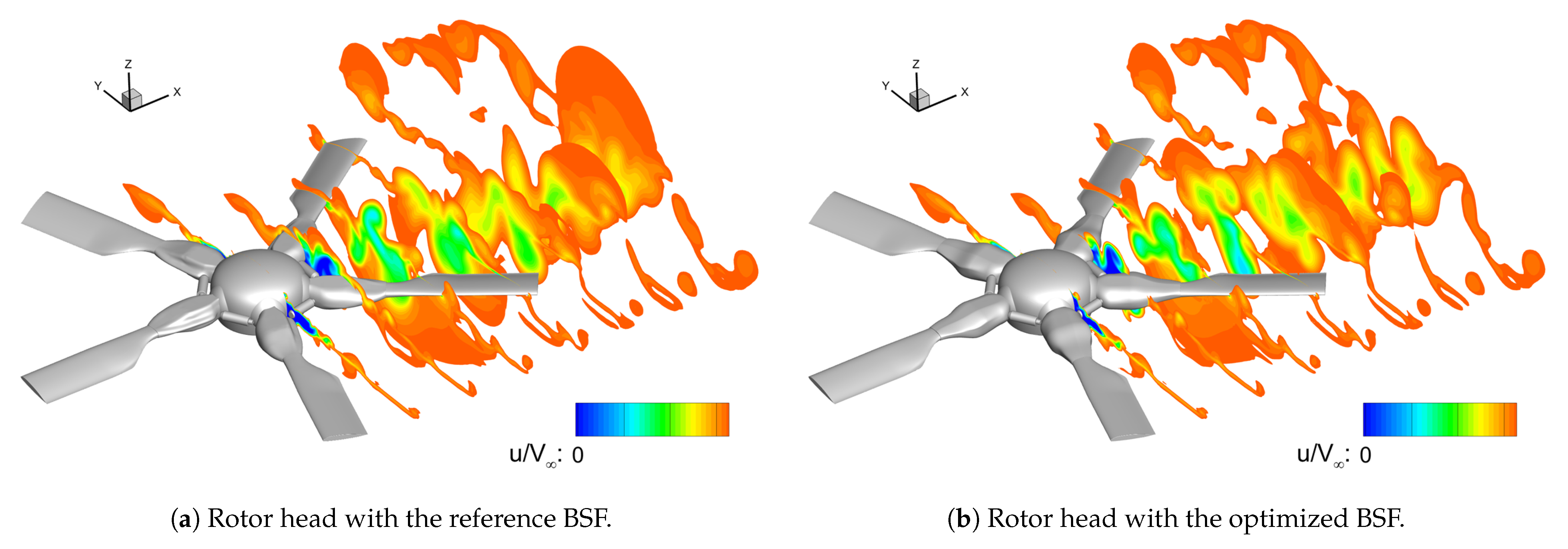
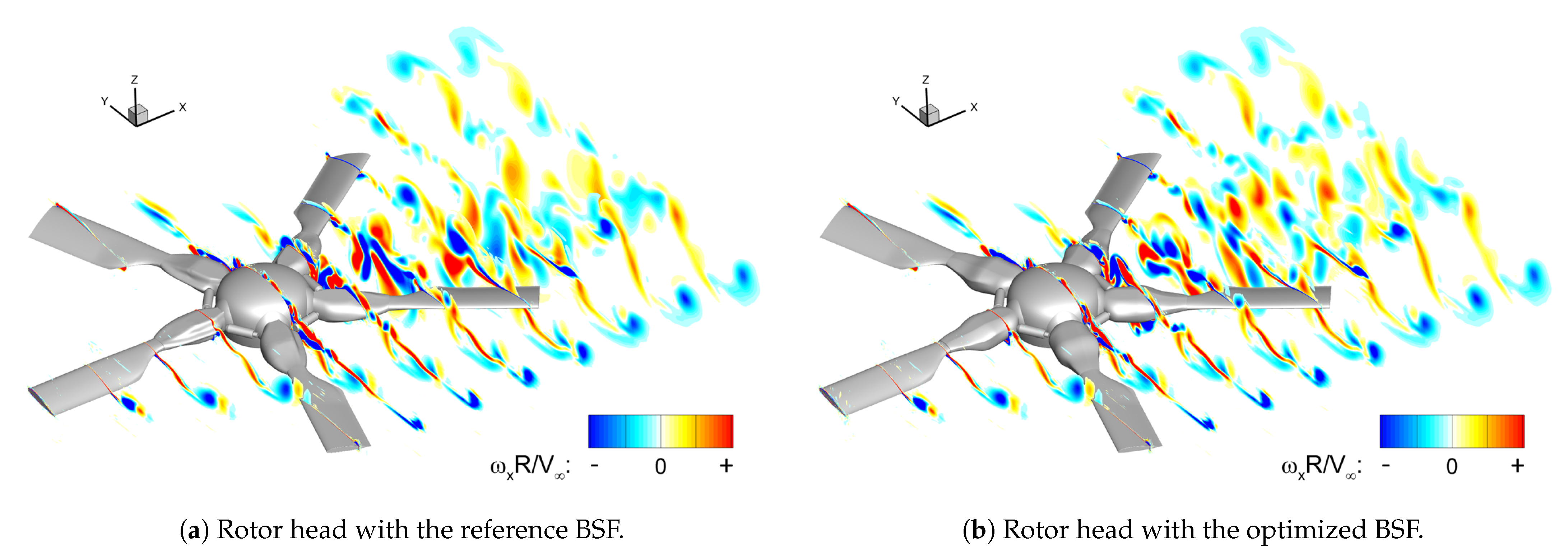
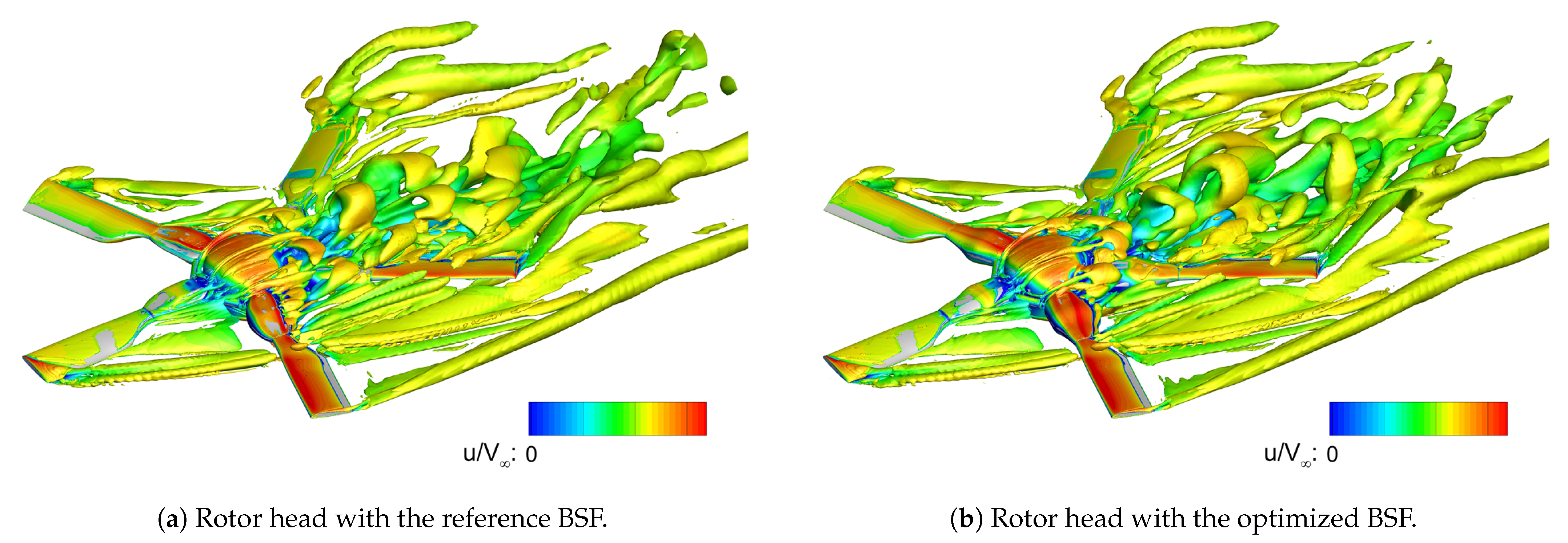
3.3. Flow Field Visualization
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ADHeRo | Aerodynamic Design Optimization of a Helicopter Fuselage including a Rotating Rotor Head |
| BPF | Blade-Passing Frequency |
| BSF | Blade-Sleeve Fairing |
| CARD | Contribution to Analysis of Rotor-hub Drag reduction |
| CFD | Computational Fluid Dynamics |
| FFB | Full-Fairing Beanie |
| FFT | Fast Fourier Transformation |
| FURADO | Full-Fairing Rotor Head Aerodynamic Design Optimization |
| HEMS | Helicopter Emergency Medical Service |
| IADP | Innovative Aircraft Demonstrator Platforms |
| ICAO | International Civil Aviation Organization |
| RACER | Rapid And Cost-Effective Rotorcraft |
| RB | Rotor Blade |
| SAR | Search And Rescue |
| SST | Shear Stress Transport |
| TEL | Twin Engine Light |
| UDF | User-Defined Function |
| URANS | Unsteady Reynolds-Averaged Navier–Stokes |
References
- IATA’s Annual Review. 2019. Available online: https://www.iata.org/en/publications/annual-review/ (accessed on 9 December 2020).
- Flightpath 2050—Europe’s Vision for Aviation. Available online: https://ec.europa.eu/transport/sites/transport/files/modes/air/doc/flightpath2050.pdf (accessed on 9 December 2020).
- Clean Sky. Available online: https://www.cleansky.eu/ (accessed on 9 December 2020).
- Johnson, W. Maximum Speed. In Helicopter Theory; Dover Publications Inc.: Mineola, NY, USA, 1994; pp. 297–298. [Google Scholar]
- Airbus Helicopters Reveals Racer High-Speed Demonstrator Configuration. Available online: https://www.airbus.com/newsroom/press-releases/en/2017/06/Airbus-Helicopters-reveals-Racer-high-speed-demonstrator-configuration.html (accessed on 9 December 2020).
- Stalewski, W.; Zoltak, J. Optimisation of the Helicopter Fuselage with Simulation of Main and Tail Rotor Influence. In Proceedings of the 28th International Congress of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012. [Google Scholar]
- Batrakov, A.S.; Kusyumov, A.N.; Mikhailov, S.A.; Barakos, G.N. Aerodynamic Optimization of Helicopter Rear Fuselage. Aerosp. Sci. Technol. 2018, 77, 704–712. [Google Scholar] [CrossRef] [Green Version]
- Le Pape, A.; Lienard, C.; Verbeke, C.; Pruvost, M.; De Coninck, J.-L. Helicopter Fuselage Drag Reduction using Active Flow Control: A Comprehensive Experimental Investigation. J. Am. Helicopter Soc. 2015, 60, 1–12. [Google Scholar] [CrossRef]
- De Gregorio, F. Helicopter Fuselage Model Drag Reduction by Active Flow Control Systems. In Proceedings of the 43rd European Rotorcraft Forum, Milan, Italy, 12–15 September 2017. [Google Scholar]
- Reß, R.; Grawunder, M.; Breitsamter, C. Parasite Drag Reduction of a Twin Engine Lightweight Helicopter Configuration. In Proceedings of the 63rd German Aerospace Congress, Augsburg, Germany, 16–18 September 2014. [Google Scholar]
- Grawunder, M.; Reß, R.; Breitsamter, C. Helicopter Aft-Body Drag Reduction by Passive Flow Control. In Proceedings of the 40th European Rotorcraft Forum, Southampton, UK, 2–5 September 2014. [Google Scholar]
- Boniface, J.-C. A Computational Framework for Helicopter Fuselage Drag Reduction using Vortex Generators. J. Am. Helicopter Soc. 2016, 61, 1–13. [Google Scholar] [CrossRef]
- Wagner, S. Problems of estimating the drag of a helicopter. In Proceedings of the 124th AGARD Conference, Izmir, Turkey, 10–13 April 1973. [Google Scholar]
- Grawunder, M.; Reß, R.; Breitsamter, C.; Adams, N.A. Flow characteristics of a helicopter fuselage configuration including a rotating rotor head. In Proceedings of the 28th International Congress of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012. [Google Scholar]
- Desvigne, D.; Alfano, D. Rotor-head/Fuselage Interactional Effects on Helicopter Drag: Influences of the Complexification of the Rotor-head Geometry. In Proceedings of the 39th European Rotorcraft Forum, Moscow, Russia, 3–6 September 2013. [Google Scholar]
- Khier, W. Numerical Analysis of Hub and Fuselage Interference to reduce Helicopter Drag. In Proceedings of the 38th European Rotorcraft Forum, Amsterdam, The Netherlands, 4–7 September 2012. [Google Scholar]
- Desvigne, D.; Alfano, D. Helicopter Drag Mitigation during the CARD Project: Numerical Investigation of Rotor and Pylon Fairings. In Proceedings of the 42nd European Rotorcraft Forum, Lille, France, 5–8 September 2016. [Google Scholar]
- Graham, D.R.; Sung, D.Y.; Young, L.A.; Louie, A.W.; Stroub, R.H. Helicopter Hub Fairing and Pylon Interference Drag; NASA Technical Memorandum 101052; Ames Research Center: Moffett Field, CA, USA, 1989. [Google Scholar]
- Martin, D.M.; Mort, R.W.; Young, L.A.; Squires, P.K. Experimental Investigation of Advanced Hub and Pylon Fairing Configurations to Reduce Helicopter Drag; NASA Technical Memorandum 4540; Ames Research Center: Moffett Field, CA, USA, 1993. [Google Scholar]
- Wentrup, M.; Khier, W.; Zhang, Q. Drag Reduction of a Transport Helicopter by Application of an adjoint-based Fuselage Optimization Chain and Modification of the Rotor Head. In Proceedings of the Greener Aviation Conference: Clean Sky breakthroughs and worldwide status, Brussels, Belgium, 12–14 March 2014. [Google Scholar]
- Full Fairing Rotor Head Aerodynamic Design Optimization (FURADO). Available online: www.furado.tum.de (accessed on 19 December 2020).
- Pölzlbauer, P.; Desvigne, D.; Breitsamter, C. Aerodynamic Design Optimization of a Helicopter Rotor Blade-Sleeve Fairing. CEAS Aeronaut. J. 2019, 10, 665–685. [Google Scholar] [CrossRef]
- Pölzlbauer, P.; Desvigne, D.; Breitsamter, C. Performance Improvement of a Compound Helicopter Rotor Head by Aerodynamic Design Optimization of a Blade-Sleeve Fairing. Aeronaut. J. 2019, 123, 1456–1475. [Google Scholar] [CrossRef]
- Airbus Helicopters H175 Main Rotor Head. Available online: https://gallery.vtol.org/image/EtSD (accessed on 1 November 2020).
- Benek, J.A.; Steger, J.L.; Dougherty, F.C. A Flexible Grid Embedding Technique with Application to the Euler Equations. In Proceedings of the 6th AIAA Computational Fluid Dynamics Conference, Danvers, MA, USA, 13–15 July 1983. [Google Scholar]
- Benek, J.A.; Steger, J.L.; Dougherty, F.C.; Buning, P.G. Chimera: A Grid-Embedding Technique; Final Technical Report AEDC-TR-85-64; Arnold Engineering Development Center, Air Force Systems Command Arnold Air Force Station: Tullahoma, TN, USA, 1986. [Google Scholar]
- Lombard, C.K.; Venkatapathy, E. Implicit boundary treatment for joined and disjoint patched mesh systems. In Proceedings of the 7th AIAA Computational Physics Conference, Cincinnati, OH, USA, 15–17 July 1985. [Google Scholar]
- ANSYS, Inc. ANSYS Fluent User’s Guide; Release 2019.R2; ANSYS, Inc.: Canonsburg, PA, USA, 2019. [Google Scholar]
- Menter, F.R. Two-Equation Eddy-Viscosity Turbulence Models for Engineering Applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh Size | No. of Elements (×10) | Lift (%) | Drag (%) |
|---|---|---|---|
| Fine mesh | 52 | - | - |
| Medium mesh | 29 | +1.9 | −0.7 |
| Coarse mesh | 13 | +1.2 | +7.8 |
| Cell Zone (Domain) | No. of Blocks | No. of Elements (×10) |
|---|---|---|
| Farfield | 26 | 1.28 |
| Background mesh | 19 | 13.05 |
| Beanie | 240 | 2.24 |
| Rotor blade 1–5 | 142 × 5 | 2.20 × 5 |
| Collar 1–5 | 16 × 5 | 0.15 × 5 |
| Damper 1–5 | 26 × 5 | 0.14 × 5 |
| Total | 1205 | 29.03 |
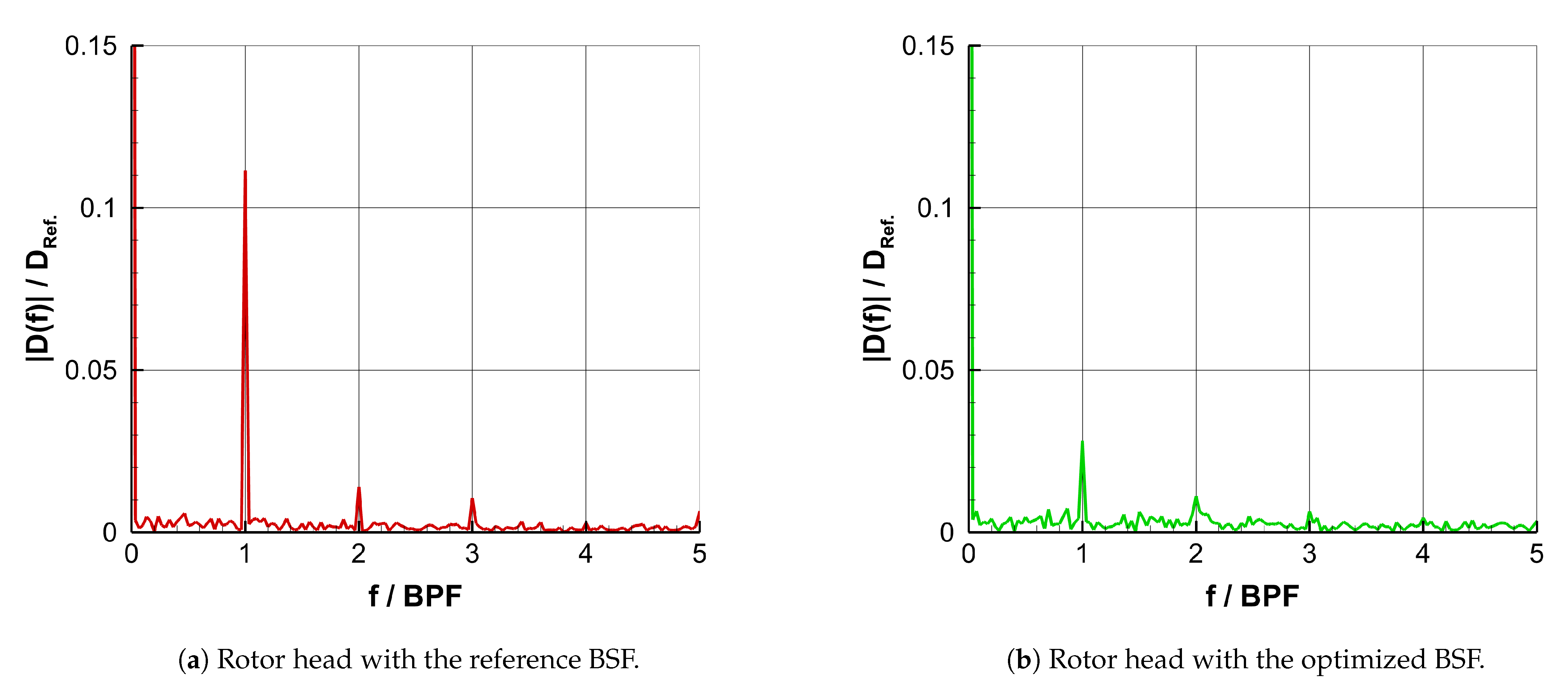
| RH w/ Reference BSF | RH w/ Optimized BSF | |||
|---|---|---|---|---|
| 0 | 1.000 | 1.000 | 1.201 | 0.953 |
| 1 | 0.408 | 0.112 | 0.446 | 0.028 |
| 2 | 0.137 | 0.014 | 0.218 | 0.011 |
| 3 | 0.010 | 0.011 | 0.019 | 0.006 |
| 4 | 0.065 | 0.003 | 0.055 | 0.004 |
| 5 | 0.045 | 0.007 | 0.016 | 0.004 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pölzlbauer, P.; Kümmel, A.; Desvigne, D.; Breitsamter, C. Numerical Investigation of an Optimized Rotor Head Fairing for the RACER Compound Helicopter in Cruise Flight. Aerospace 2021, 8, 66. https://doi.org/10.3390/aerospace8030066
Pölzlbauer P, Kümmel A, Desvigne D, Breitsamter C. Numerical Investigation of an Optimized Rotor Head Fairing for the RACER Compound Helicopter in Cruise Flight. Aerospace. 2021; 8(3):66. https://doi.org/10.3390/aerospace8030066
Chicago/Turabian StylePölzlbauer, Patrick, Andreas Kümmel, Damien Desvigne, and Christian Breitsamter. 2021. "Numerical Investigation of an Optimized Rotor Head Fairing for the RACER Compound Helicopter in Cruise Flight" Aerospace 8, no. 3: 66. https://doi.org/10.3390/aerospace8030066
APA StylePölzlbauer, P., Kümmel, A., Desvigne, D., & Breitsamter, C. (2021). Numerical Investigation of an Optimized Rotor Head Fairing for the RACER Compound Helicopter in Cruise Flight. Aerospace, 8(3), 66. https://doi.org/10.3390/aerospace8030066