Self-Oscillations of The Free Turbine Speed in Testing Turboshaft Engine with Hydraulic Dynamometer †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Literature Review
3. Research Objectives
- To establish the causes of occurrence and development of the self-oscillations of free turbine and gas generator rotor speed during ground testing of TV3-117 turboshaft with water brake installation.
- Studying the influence of the dynamic parameters of automatic control system of free turbine speed (ACS (nFT)) of TV3-117 turboshaft with NR-3 regulator-pump on inducing self-oscillations in the FTSC operating range during ground testing with a water brake and when the engine operates as part of helicopter power plant. Determining the unfavourable combination of the ACS (nFT) dynamic parameters that can induce the self-oscillations.
- Development of recommendations for ground testing the TV3-117 turboshaft with water brake.
4. Methods
- Dynamic model of the gas generator (GG) rotor;
- Dynamic model of the FT rotor connected to water brake;
- Dynamic model of the FT rotor connected to helicopter main rotor;
- Dynamic model of the FTSC.
- The difference between the inertance of the heat release processes in the combustion chamber in comparison with the inertance of the engine rotors and can be neglected;
- The inertance of the gas-dynamic processes associated with the accumulation and draining of the working fluid in the engine internal cavities is negligible small;
- The torque losses associated with an accessories drive and friction in the bearings are negligible.
- Based on the notes above, the dynamics of the turboshaft engine is determined by the dynamics of the gas generator, free turbine and free turbine controller.
4.1. Dynamic Model of the Gas Generator Rotor
- 9 s–from idle to take-off mode;
- 4 s–from first cruise to take-off mode;
- 3–6 s–from idle to right correction.
4.2. Dynamic Model of the Free Turbine Rotor
4.3. Dynamic Model of the Free Turbine Speed Controller
5. Results and Discussion
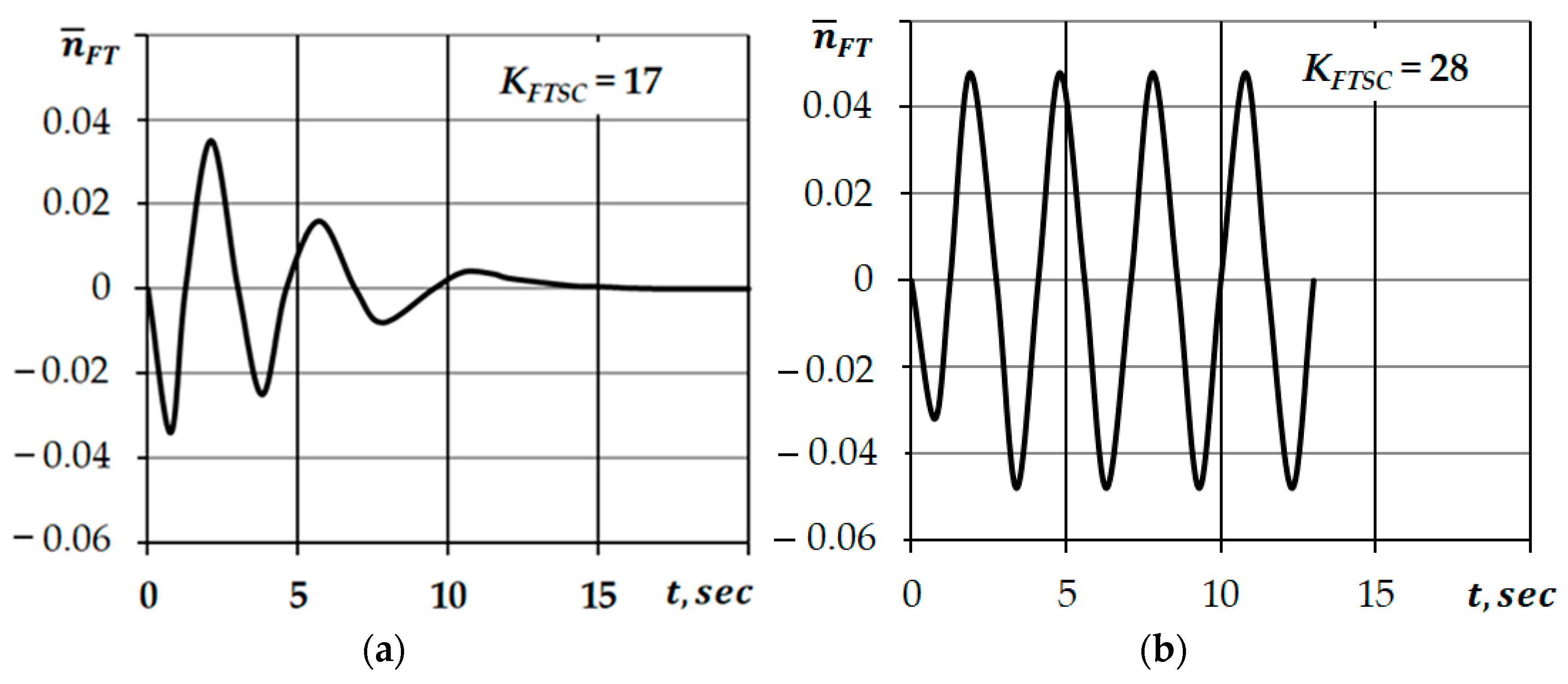
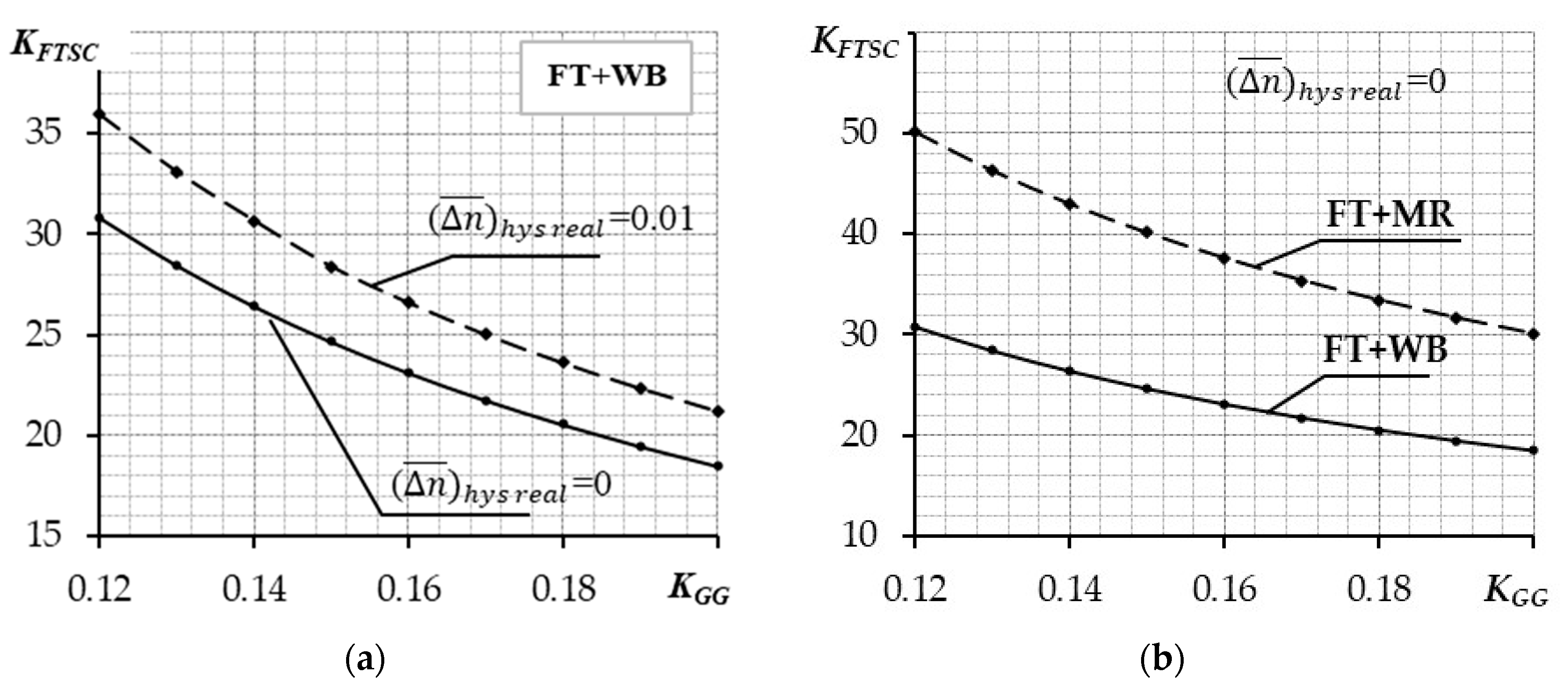
5.1. Influence of FTSC Gain
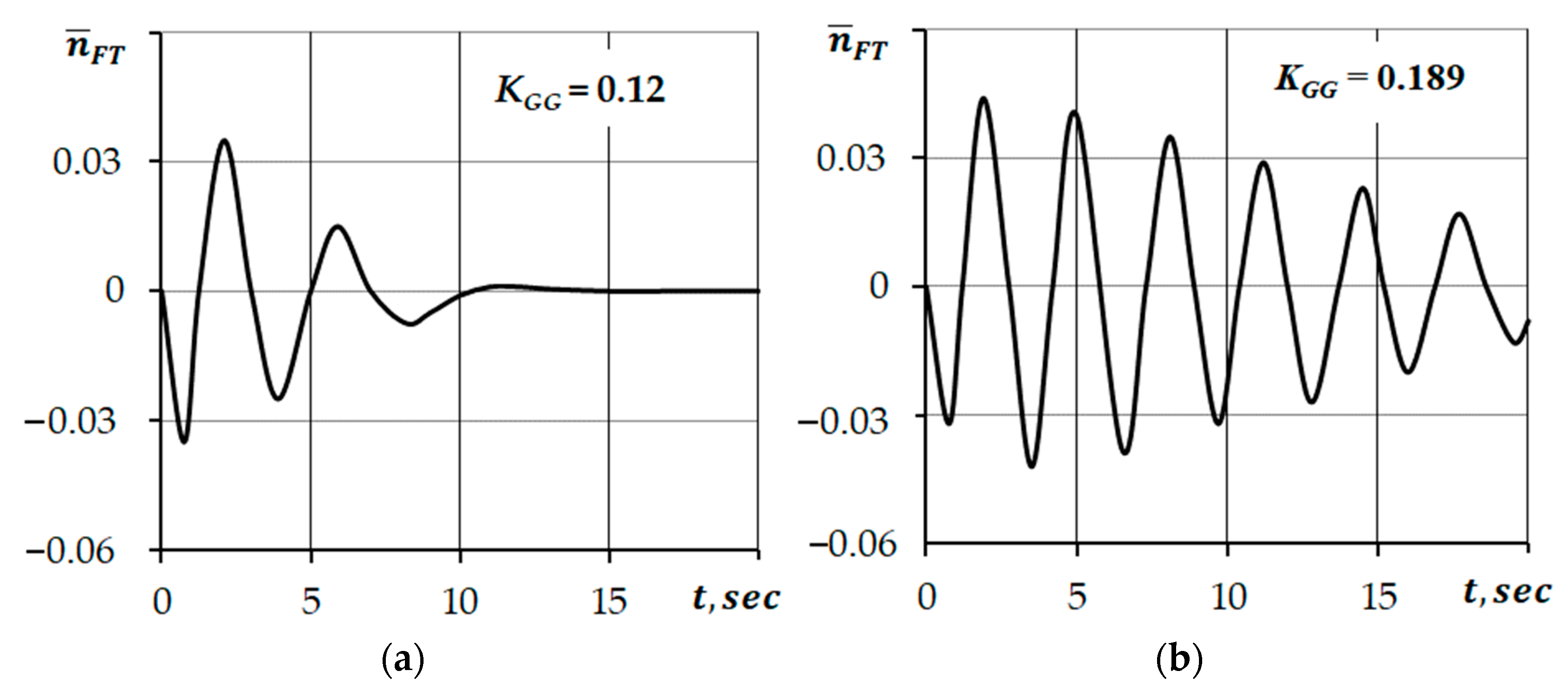
5.2. Influence of GG Gain
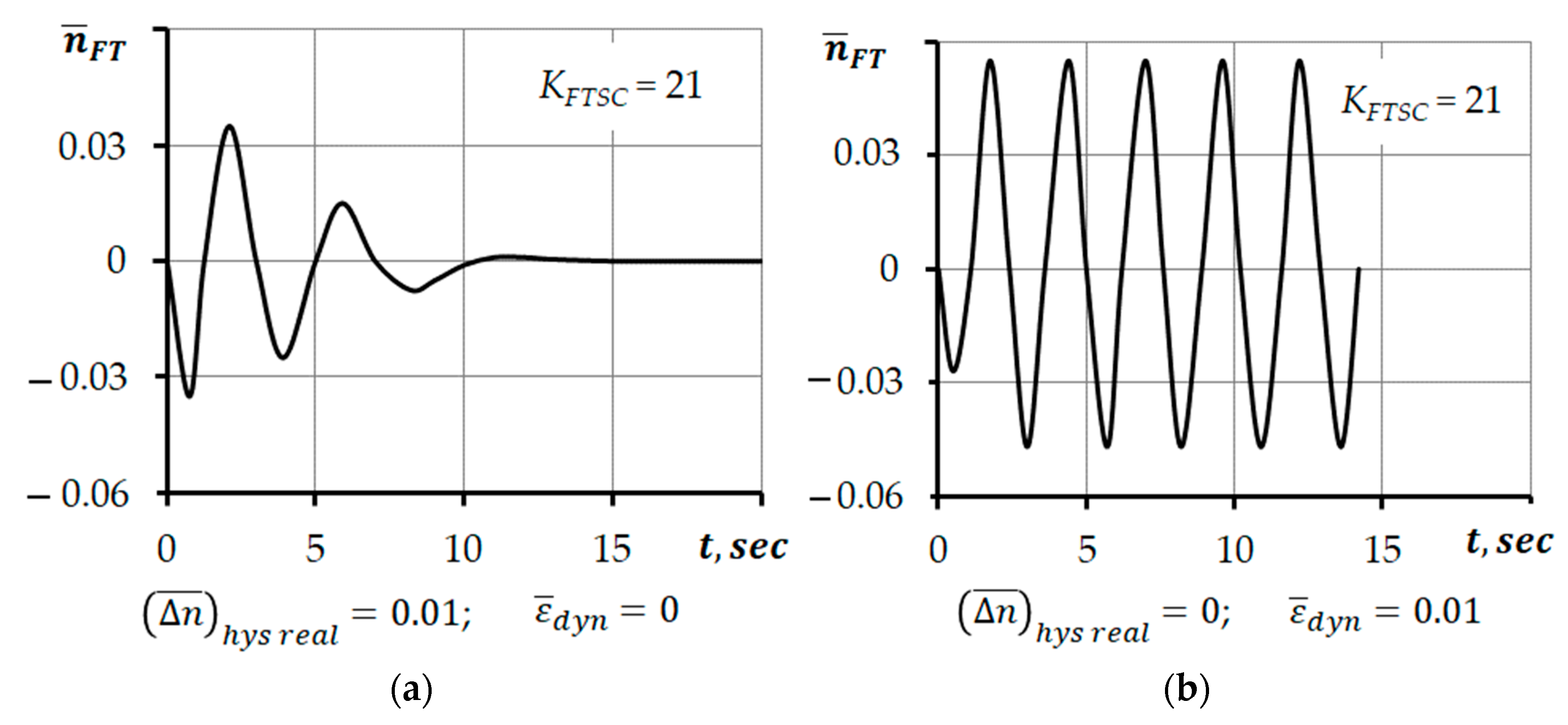
5.3. Influence of the FTSC Characteristic ‘Discontinuity’
6. Conclusions
- Water brake characteristics mismatch with characteristics of the helicopter main rotor;
- Unsatisfactory characteristics of free turbine speed controller of the NR-3 regulator-pump (discontinuity, break, mismatch of the gain factor with the requirements of technical specifications, insufficient value of the hysteresis);
- Mismatch of the characteristics of free turbine speed controller with dynamic parameters of gas generator.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FTSC | Free Turbine Speed Controller |
| ACS | Automatic Control System |
| FT | Free Turbine |
| WB | Water Brake |
| MR | Main Rotor of the Helicopter |
| GG | Gas Generator |
| MMV | Main Metering Valve |
References
- Ahmedzjanov, D.A. Transient operating modes of aircraft gas turbine engines. USATU Bull. Autom. Control Technol. Process. Prod. 2006, 7, 36–46. Available online: https://www.docme.su/doc/1689833/neustanovivshiesya-rezhimyraboty-aviacionnyh-gtd..pdf (accessed on 21 September 2019).
- Gurevich, O.S. Automatic Control Systems for Aircraft Gas Turbine Engines; TORUS PRESS: Moscow, Russia, 2010; Available online: https://search.rsl.ru/ru/record/01004961128 (accessed on 21 September 2019).
- Chiang Alpha, C. Elements of Dynamic Optimization; Waveland Press: Long Grove, IL, USA, 2000; 327p. [Google Scholar]
- Gaevsky, S.A.; Morozov, F.N.; Tikhomirov, Y.P.; Shtoda, A.V. Aviation Power Plant Automation; Shtody, A.V., Ed.; USSR: Moscow, Russia, 1980; 241p, Available online: https://ru.b-ok.global/book/3669117/2d8b3c (accessed on 21 September 2019).
- Volkov, V.V.; Semjonov, A.D. Dynamics of Nonlinear Mechanical Systems; Penza State Technological University: Penza, Russia, 2015. [Google Scholar]
- Dedesh, V.T. Stability and self-oscillations of nonlinear single-loop automatic control systems. TsAGI Sci. Notes 2010, 42, 82–92. [Google Scholar]
- Grushun, A.I.; Grushun, T.A. Computer analysis of self-oscillations in nonlinear automatic control systems based on the harmonic balance method. SEVNTU Bull. 2020, 146, 223–225. [Google Scholar]
- Tumanov, M.P.; Abdullin, S.R.; Serebrennikov, P.S. Investigation of fluctuations in control systems with a variable structure, taking into account the delay. Moscow State Forest Univ. Bull. 2020, 1, 20–30. [Google Scholar] [CrossRef]
- Karra, S.; Jelali, M.; Karim, M.; Horch, A. Detection and Diagnosis of Stiction in Control Loops. Advances in Industrial Control; Springer: London, UK, 2009. [Google Scholar] [CrossRef]
- Shoukat, C.M.A.A.; Shah, S.L.; Thornhill, N.F. Diagnosis of Process Nonlinearities and Valve Stiction. Advances in Industrial Control; Springer: London, UK, 2008. [Google Scholar]
- Li, C.; Shoukat, C.M.A.A.; Huang, B.; Qian, F. Frequency analysis and compensation of valve stiction in cascade control loops. J. Process Control 2014. [Google Scholar] [CrossRef]
- Savelyev, D.O.; Gudim, A.S.; Solovev, D. Stabilizing the Transients in the Objects and Systems Controlling the Compensation of Nonlinear ACS (Automatic Control System) Elements. In Proceedings of the 2019 International Science and Technology Conference, Vladivostok, Russia, 1–2 March 2019; pp. 575–579. [Google Scholar] [CrossRef]
- Gimadiev, A.G.; Bukin, V.A.; Greshhnjakov, P.I.; Utkin, A.V. Experimental study of oscillatory processes when testing a turboprop engine with hydraulic dynamometer. In Proceedings of the International Scientific and Technical Conference, Samara, Russia, 22–24 July 2016; pp. 20–21. [Google Scholar]
- Gruenbacher, E.; del Re, L.; Kokal, H.; Schmidt, M.; Paulweber, M. Adaptive control of engine torque with input delays. In Proceedings of the 17th World Congress the International Federation of Automatic Control, Barselona, Spain, 1 January 2008; pp. 9479–9484. [Google Scholar] [CrossRef] [Green Version]
- Litvjak, O.M.; Durєєv, V.O.; Maljarov, M.V.; Chigrin, V.S. Experimental study of the free turbine speed controller characteristics of NR-3 regulator-pump. In Integrated Computer Technologies in Mechanical Engineering, Proceedings of the International Scientific and Practice Conference, Kaunas, Lithuania, 9–10 May 2019; Kharkiv Aviation Institute, Zhukovsky National Aerospace University: Kharkiv, Ukraine, 2019; Volume 2, pp. 76–79. [Google Scholar]
- Kachanov, P.; Lytviak, O.; Derevyanko, O.; Komar, S. Development of an automated hydraulic brake control system for testing aircraft turboshaft gas turbine engines. East. Eur. J. Enterp. Technol. 2019, 6, 52–57. [Google Scholar] [CrossRef]
- Golovashchenko, A. Octopus or the role of the brake in the progress of turbine construction. Engine 2004, 4, 16–54. [Google Scholar]
- Shmyrov, V.; Loginov, V.; Fil, S.; Khaustov, A.; Bondarchuk, O.; Kalashnikov, A.; Khmelnitskiy, G. The modernization concept of aircraft An-26 and An-140 based on the use of a hybrid power system. East. Eur. J. Enterp. Technol. 2020, 1, 6–17. [Google Scholar] [CrossRef]
- Benini, E.; Misté, G. Performance of a Turboshaft Engine for Helicopter Applications Operating at Variable Shaft Speed; Department of Industrial Engineering, University of Padova: Padova, Italy, 2012. [Google Scholar] [CrossRef]
- Misté, G.; Garavello, A.; Benini, E.; Alcoy, M. New methodology for determining the optimal rotational speed of a variable RPM main rotor/Turboshaft Engine System. J. Am. Helicopter Soc. 2013, 60. [Google Scholar] [CrossRef]
- Yan, X.; Zhou, Q.; Jia, Y.; Chen, L. Simulation analysis of complex electromagnetic environment effect of helicopter engine. In Journal of Physics: Conference Series, Proceedings of the 2nd International Conference on Electronic Engineering and Informatics, Lanzhou, China, 17–19 July 2020; IOP Publishing: Bristol, UK, 2020; Volume 1617, Available online: https://iopscience.iop.org/article/10.1088/1742-6596/1617/1/012019/pdf (accessed on 12 February 2021).
- Wu, H.; Li, B.; Zhao, S.; Yang, X.; Song, H. Research on initial installed power loss of a certain type of turboshaft engine using data mining and statistical approach. Hindawi Math. Probl. Eng. 2018, 9412350. [Google Scholar] [CrossRef]
- Yildirim, M.T.; Kurt, B. Aircraft gas turbine engine health monitoring system by real flight data. Int. J. Aerosp. Eng. 2018, 2018, 9570873. [Google Scholar] [CrossRef] [Green Version]
- Yu, H.; Sun, H.; Yan, L.; Zhang, K. Study on the condition monitoring system of certain type of turboshaft engine based on flight data. In Proceedings of the First Symposium on Aviation Maintenance and Management; Springer: Berlin, Germany, 2014; Volume I, pp. 227–234. [Google Scholar] [CrossRef]
- Coban, K.; Colpan, C.; Karakoc, T. Application of thermodynamic laws on a military helicopter engine. Energy 2017, 140, 1427–1436. [Google Scholar] [CrossRef]
- Aguilar, L.; Boiko, I.; Fridman, L.; Iriarte, R. Self-Oscillations in Dynamic Systems; Birkhäuser: Basel, Switzerland, 2015. [Google Scholar]
- Garavello, A.; Benini, E. Preliminary Study on a Wide Speed Range Helicopter Rotor/Turboshaft System. AIAA J. Aircr. 2012, 49, 1032–1038. [Google Scholar] [CrossRef]
- Ozsoy, C.; Duyar, A.; Kazan, R.; Kiliç, R. Power Turbine Speed Control of The GE T700 Engine Using The Zero Steady-State Self-Tuning Regulator. In Proceedings of the International Conference on Intelligent Engineering Systems, Budapest, Hungary, 15–17 September 1997; pp. 371–378, ISBN 0-7803-3627-5. [Google Scholar]
- Yeo, H.; Bousman, W.; Johnson, W. Performance Analysis of a Utility Helicopter with Standard and Advanced Rotors. J. Am. Helicopter Soc. 2005, 49, 250–270. [Google Scholar] [CrossRef] [Green Version]
- Massaro, A.; D’Andrea, A.; Benini, E. Multiobjective-Multipoint Rotor Blade Optimization in Forward Flight Conditions Using Surrogate-Assisted Memetic Algorithms. In Proceedings of the 37th European Rotorcraft Forum, Gallarate, Italy, 13–15 September 2011. [Google Scholar]
- Welch, G.E. Assessment of Aerodynamic Challenges of a Variable-Speed Power Turbine for Large Civil Tilt-Rotor Application; NASA TM-2010-216758; NASA: Washington, DC, USA, 2010. Available online: https://core.ac.uk/download/pdf/10556060.pdf (accessed on 14 October 2020).
- Cameretti, M.; Del Pizzo, A.; Di Noia, L.; Ferrara, M.; Pascarella, C. Modeling and Investigation of a Turboprop Hybrid Electric Propulsion System. Aerospace 2018, 5, 123. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Huang, X.; Xia, T. Research on Modeling of a Micro Variable-Pitch Turboprop Engine Based on Rig Test Data. Energies 2020, 13, 1768. [Google Scholar] [CrossRef] [Green Version]
- Dvirnyk, Y.; Pavlenko, D.; Przysowa, R. Determination of Serviceability Limits of a Turboshaft Engine by the Criterion of Blade Natural Frequency and Stall Margin. Aerospace 2019, 6, 132. [Google Scholar] [CrossRef] [Green Version]
- Lu, F.; Huang, J.; Xing, Y. Fault Diagnostics for Turbo-Shaft Engine Sensors Based on a Simplified On-Board Model. Sensors 2012, 12, 11061–11076. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gu, N.; Wang, X.; Lin, F. Design of Disturbance Extended State Observer (D-ESO)-Based Constrained Full State Model Predictive Controller for the Integrated Turbo-Shaft Engine/Rotor System. Energies 2019, 12, 4496. [Google Scholar] [CrossRef] [Green Version]
- Mihaloew, J.R.; Bab, M.G.; Ruttledge, D.G. Rotorcraft Flight—Propulsion—Control Integration: An Eclectic Design Concept; NASA TP–2815; NASA: Washington, DC, USA, 1988. Available online: https://ntrs.nasa.gov/citations/19880010091 (accessed on 12 February 2021).
- Sellers, J.F.; Baez Lewis, A.N.; Bobula, G.A. Amy/NASA Small Turboshaft Engine Digital Controls Research Program; NASA TM–82979; NASA: Washington, DC, USA, 1982. Available online: https://archive.org/details/DTIC_ADA122874 (accessed on 20 December 2020).
- Swick, R.M.; Skarvan, S.A. Investigation of Coordinated Free Turbine Engine Control Systems for Multiengine Helicopters; Technical Report; USAAVLABS: Indianahjlis, IN, USA, 1967; pp. 67–73. Available online: https://apps.dtic.mil/dtic/tr/fulltext/u2/666796.pdf (accessed on 21 September 2019).









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lytviak, O.; Loginov, V.; Komar, S.; Martseniuk, Y. Self-Oscillations of The Free Turbine Speed in Testing Turboshaft Engine with Hydraulic Dynamometer. Aerospace 2021, 8, 114. https://doi.org/10.3390/aerospace8040114
Lytviak O, Loginov V, Komar S, Martseniuk Y. Self-Oscillations of The Free Turbine Speed in Testing Turboshaft Engine with Hydraulic Dynamometer. Aerospace. 2021; 8(4):114. https://doi.org/10.3390/aerospace8040114
Chicago/Turabian StyleLytviak, Oleksandr, Vasyl Loginov, Sergii Komar, and Yevhen Martseniuk. 2021. "Self-Oscillations of The Free Turbine Speed in Testing Turboshaft Engine with Hydraulic Dynamometer" Aerospace 8, no. 4: 114. https://doi.org/10.3390/aerospace8040114
APA StyleLytviak, O., Loginov, V., Komar, S., & Martseniuk, Y. (2021). Self-Oscillations of The Free Turbine Speed in Testing Turboshaft Engine with Hydraulic Dynamometer. Aerospace, 8(4), 114. https://doi.org/10.3390/aerospace8040114