
Online Identification-Verification-Prediction Method for Parallel System Control of UAVs

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
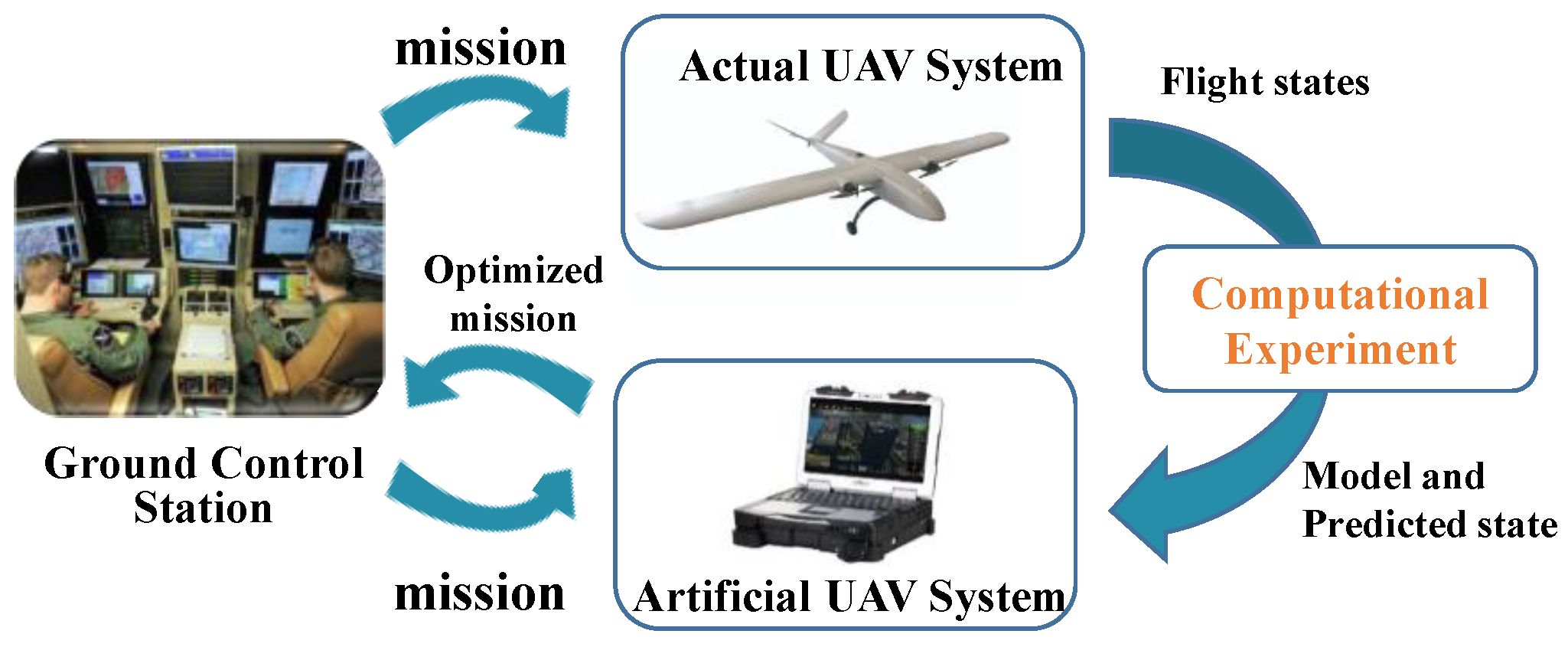
2. Problem Statement
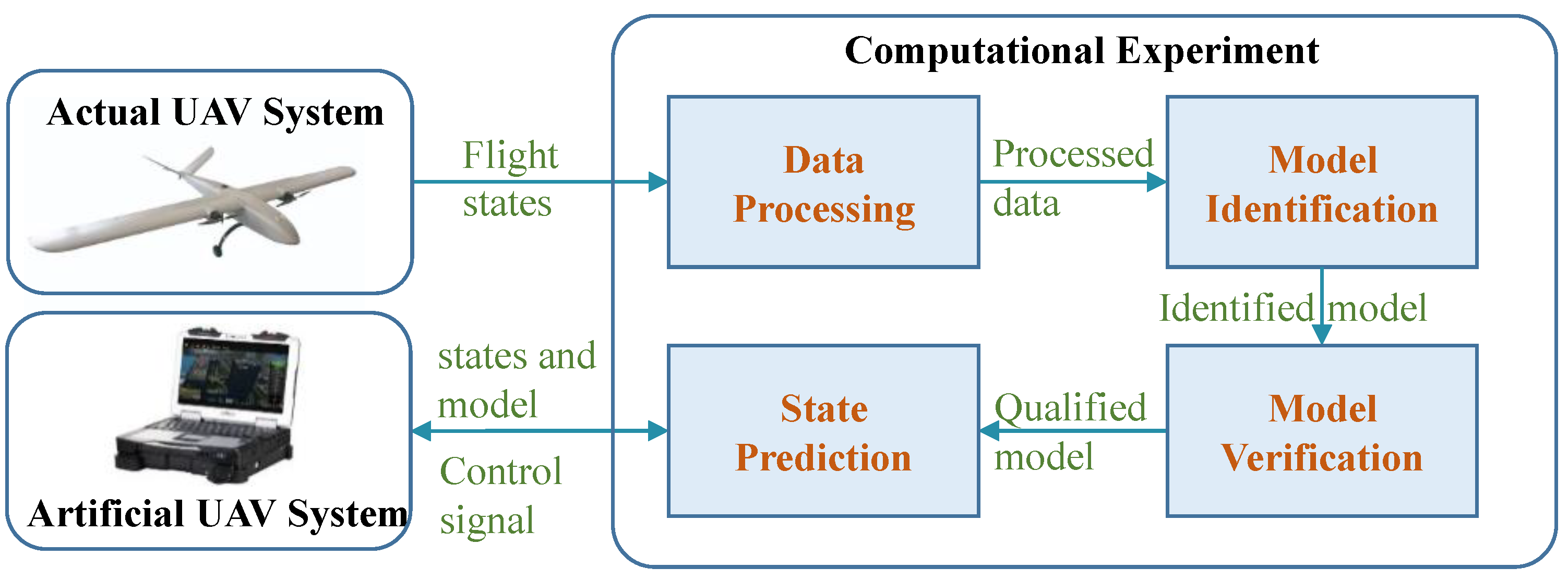
3. Approach
3.1. Model Identification
3.2. Data Processing
3.2.1. Data Preprocessing
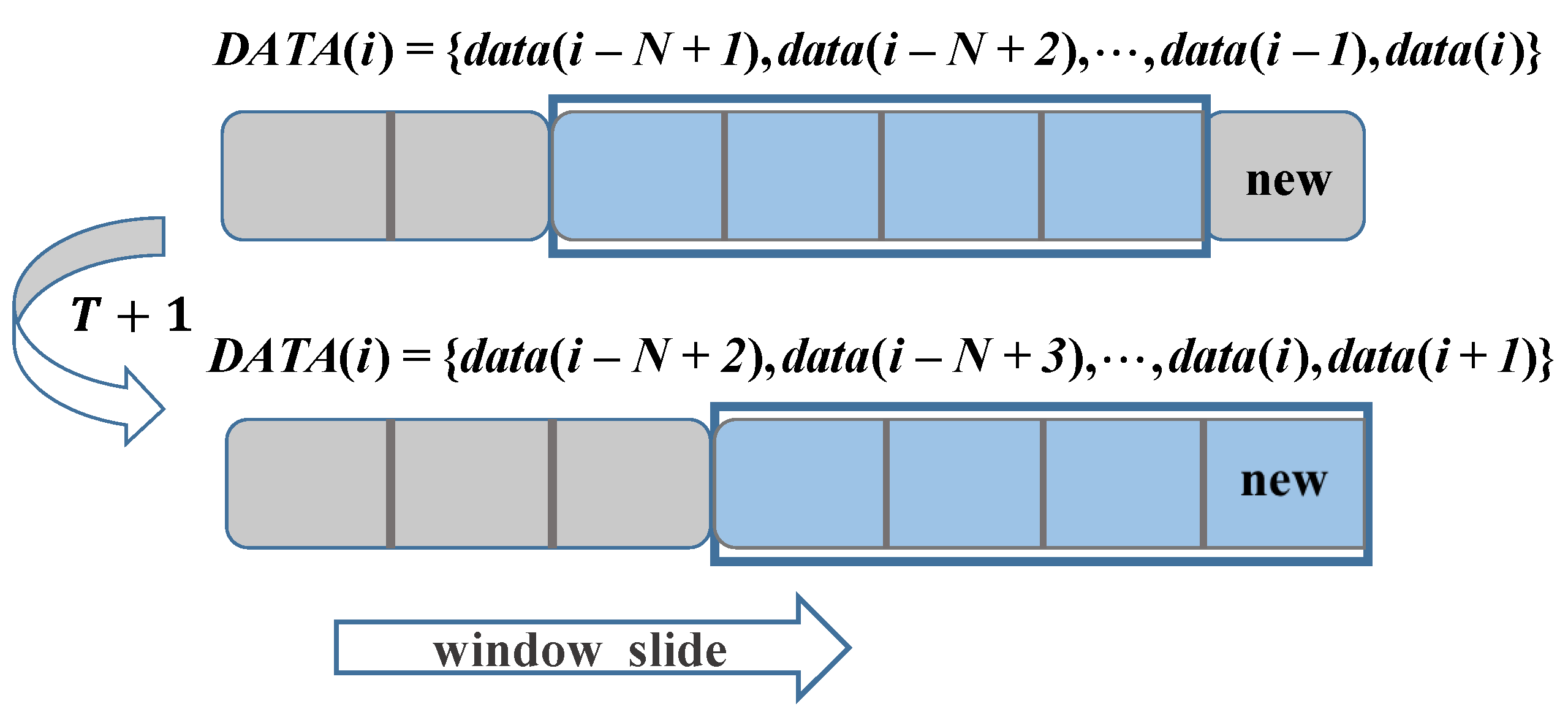
3.2.2. Sliding Time Window Method
3.3. Model Verification
3.4. State Prediction
3.5. Method Overview
| Algorithm 1 Computational Experiments Algorithm | |
| Input: -Flight_data: the real-time flight states -Model_input: the control signal | |
| Output: -Qualified_model: the qualified identification model -Predicted_data: the predicted states | |
| Workflow(Repeat): | |
| 1: | Preprocessed_data = Data_preprocess (Flight_data); |
| 2: | Identify_data = Time_window_ sliding (Preprocessed_data); |
| 3: | Firststep_model = Firststep_Identify (Identify_data); |
| 4: | Refined_model = Refine_Identify (Identify_data, Firststep _model); |
| 5: | Fit_value = Model_verify (Refined_model, Flight_data); |
| 6: | if Fit_value < |
| 7: | goto 3 |
| 8: | else |
| 9: | Qualified_model = Refined_model; |
| 10: | end if |
| 11: | Predicted_state = State_prediction(Qualified_model, Model_input); |
| 12: | return Qualified_model and Predicted_state |
4. Results and Discussion
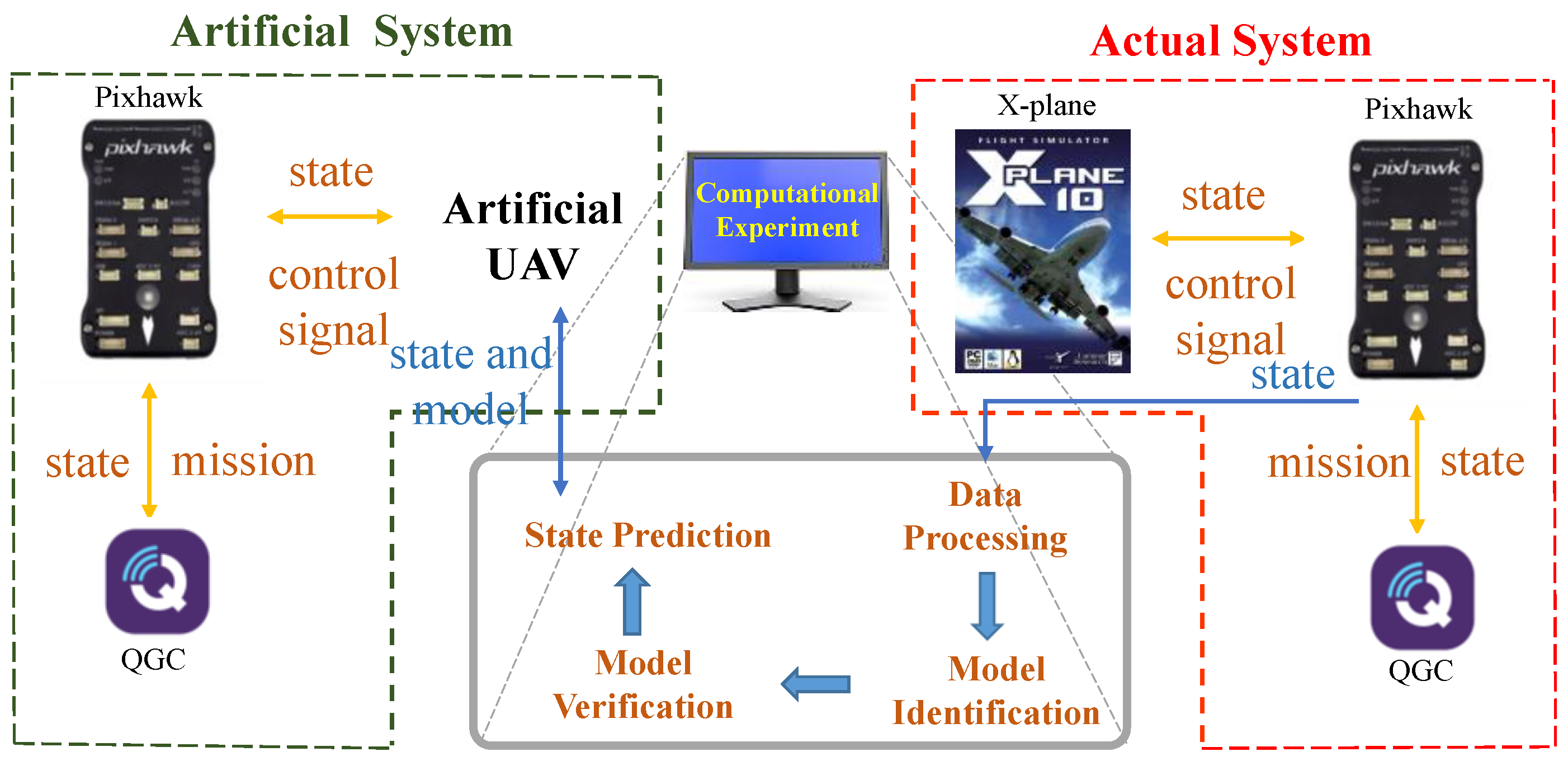
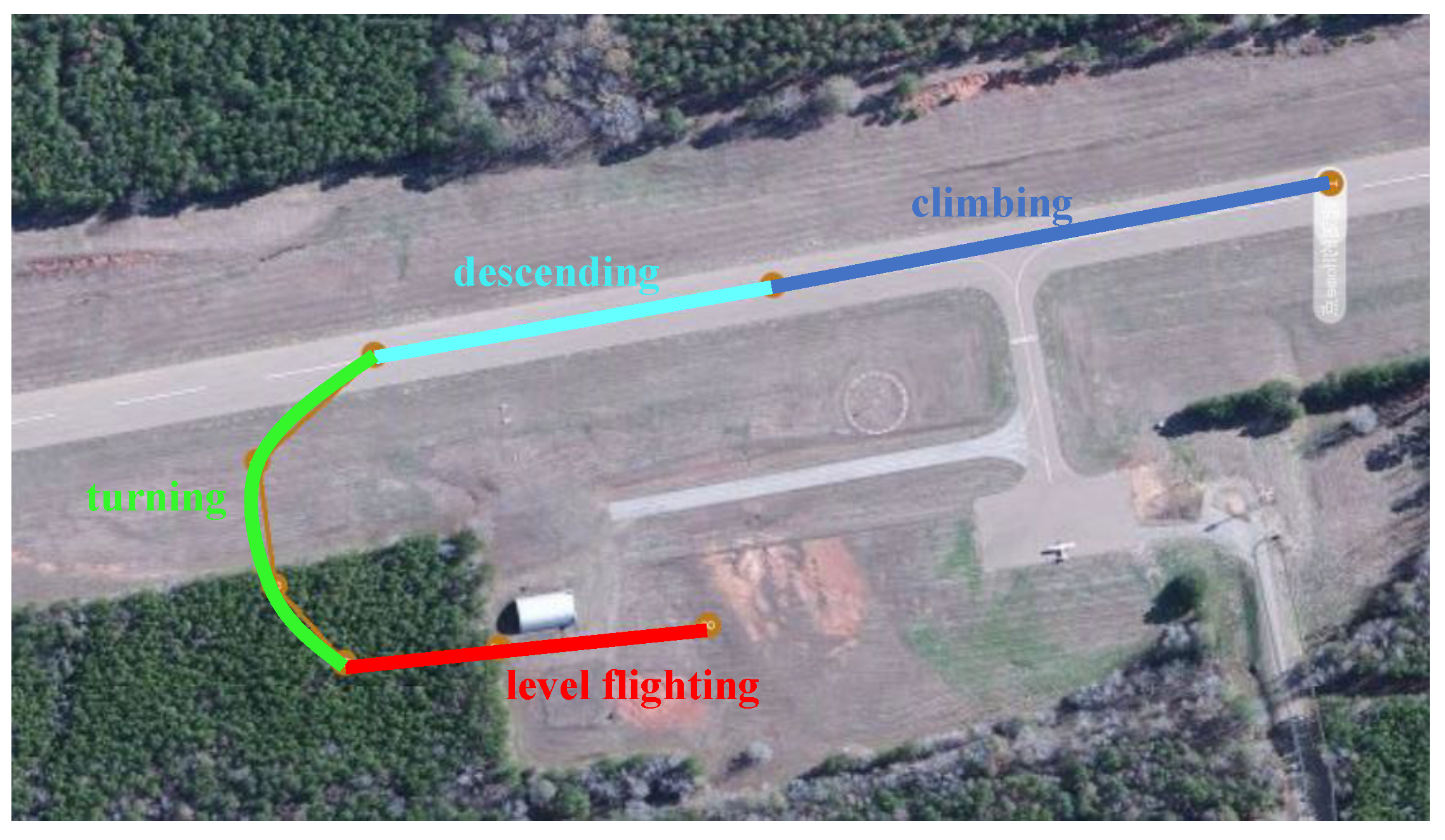
4.1. Experimental Setup
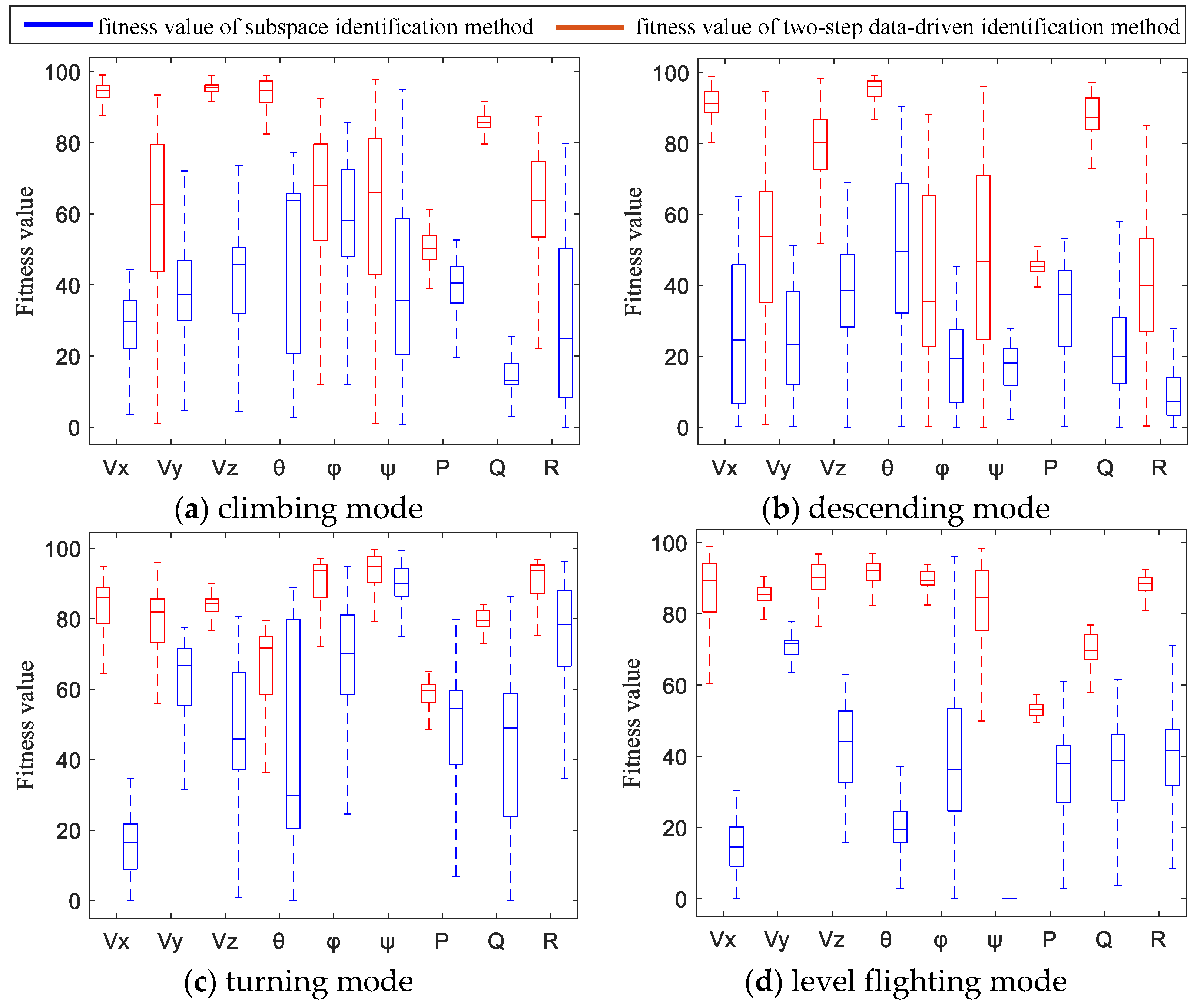
4.2. Model Identification Experiment
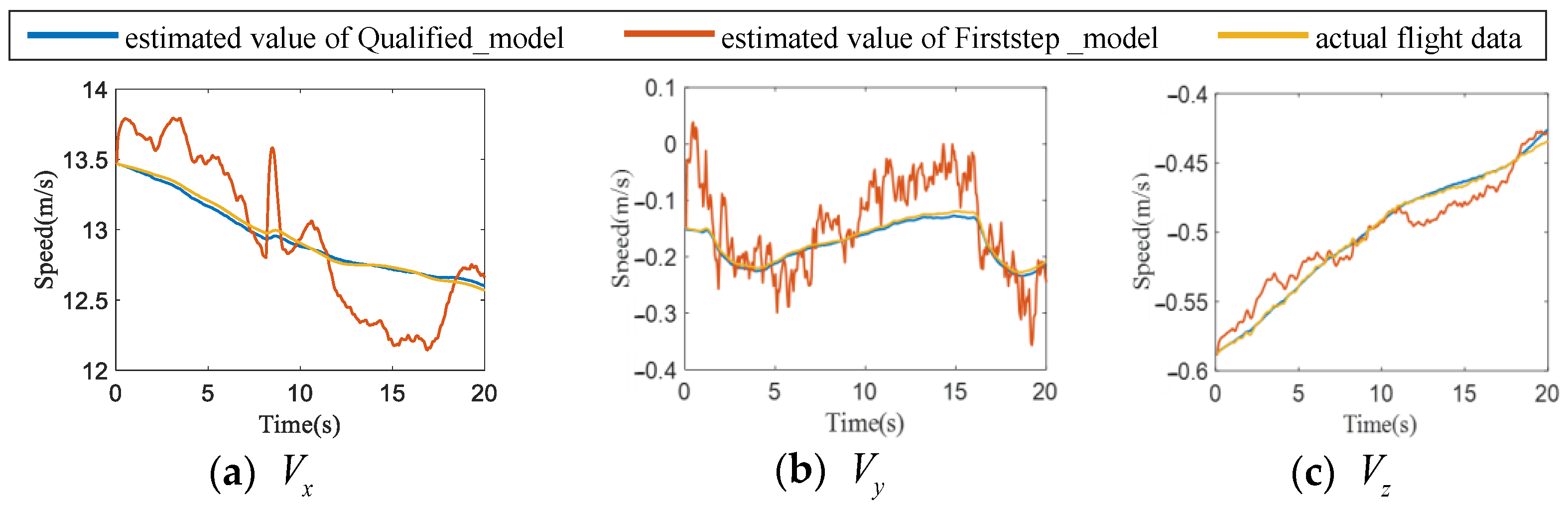
4.3. State Prediction Experiment
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, F.Y. Parallel Control and Management for Intelligent Transportation Systems: Concepts, Architectures, and Applications. IEEE Trans. Intell. Transp. Syst. 2010, 11, 630–638. [Google Scholar] [CrossRef]
- Wang, F.Y. Computational Experiments for Behavior Analysis and Decision Evaluation of Complex Systems. J. Syst. Simul. 2004, 16, 893–897. [Google Scholar]
- Jin, J.; Guo, H.; Xu, J. An End-to-End Recommendation System for Urban Traffic Controls and Management under a Parallel Learning Framework. IEEE Trans. Intell. Transp. Syst. 2020, 22, 1616–1626. [Google Scholar] [CrossRef]
- Zhang, H.; Luo, G.; Tian, Y. A Virtual-Real Interaction Approach to Object Instance Segmentation in Traffic Scenes. IEEE Trans. Intell. Transp. Syst. 2020, 22, 863–875. [Google Scholar] [CrossRef]
- Zhu, F.; Lv, Y.; Chen, Y. Parallel Transportation Systems: Toward IoT-Enabled Smart Urban Traffic Control and Management. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4063–4071. [Google Scholar] [CrossRef]
- Li, L.; Wang, X.; Wang, K. Parallel testing of vehicle intelligence via virtual-real interaction. Science 2019, 4, eaaw4106. [Google Scholar] [CrossRef]
- Wang, F.Y. Parallel Driving with Software Vehicular Robots for Safety and Smartness. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1381–1387. [Google Scholar] [CrossRef]
- Wang, F.Y.; Zheng, N.N.; Cao, D.P. Parallel Driving in CPSS: A Unified Approach for Transport Automation and Vehicle Intelligence. IEEE/CAA J. Autom. Sin. 2017, 4, 577–587. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Li, L.X.; Yuan, Y. ACP Based Social Computing and Parallel Intelligence: Societies 5. 0 and Beyond. CAAI Trans. Intell. Technol. 2016, 1, 377–393. [Google Scholar] [CrossRef]
- Wang, X.; Zheng, X.H.; Zhang, X.Z. Analysis of Cyber Interactive Behaviors Using Artificial Community and Computational Experiments. IEEE Trans. Syst. Man Cybern. 2017, 47, 995–1006. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, F.Y.; Zeng, D.L. Developing a Cooperative Bidding Framework for Sponsored Search Markets-An Evolutionary Perspective. Inf. Sci. 2016, 369, 674–689. [Google Scholar] [CrossRef]
- Qin, R.; Yuan, Y.; Wang, F.Y. Exploring the Optimal Granularity for Market Segmentation in RTB Advertising via Computational Experiment Approach. Electron. Commer. Res. Appl. 2017, 24, 68–83. [Google Scholar] [CrossRef]
- Yuan, Y.; Zeng, D.D. Co-evolution Based Mechanism Design for Sponsored Search Advertising. Electron. Commer. Res. Appl. 2012, 11, 537–547. [Google Scholar] [CrossRef]
- Wang, F.Y. Toward a Paradigm Shift in Social Computing: The ACP Approach. IEEE Intell. Syst. 2007, 22, 65–67. [Google Scholar] [CrossRef]
- Wang, F.Y.; Wang, X.; Li, L.X. Steps toward Parallel Intelligence. IEEE/CAA J. Autom. Sin. 2016, 3, 345–348. [Google Scholar]
- Wang, F.Y.; Zhang, J.J.; Zheng, X.H. Where Does AlphaGo Go: From Church Turing Thesis to AlphaGo Thesis and Beyond. IEEE/CAA J. Autom. Sin. 2016, 3, 113–120. [Google Scholar]
- Wang, F.Y.; Yang, L.Q.; Cheng, X. Network Softwarization and Parallel Networks: Beyond Software Defined Networks. IEEE Netw. 2016, 30, 60–65. [Google Scholar] [CrossRef]
- Wang, F.Y.; Zhang, J.; Wei, Q.L. PDP: Parallel Dynamic Programming. IEEE/CAA J. Autom. Sin. 2017, 4, 1–5. [Google Scholar] [CrossRef]
- Wang, K.F.; Gou, C.; Zheng, N.N. Parallel Vision for Perception and Understanding of Complex Scenes: Methods, Framework, and Perspectives. Artif. Intell. Rev. 2017, 48, 298–328. [Google Scholar] [CrossRef]
- Kang, M.Z.; Wang, F.Y. From Parallel Plants to Smart Plants: Intelligent Control and Management for Plant Growth. IEEE/CAA J. Autom. Sin. 2017, 4, 161–166. [Google Scholar] [CrossRef]
- Overschee, P.V.; Moor, B.D. Subspace Algorithms for the Stochastic Identification Problem. Automatica 1993, 29, 649–660. [Google Scholar] [CrossRef]
- Verhaegen, M. Identification of the Deterministic Part of MIMO State Space Models Given in Innovations Form From Input Output Data. Automatica 1994, 30, 61–74. [Google Scholar] [CrossRef]
- Overschee, P.V.; Moor, B.D. N4SID: Subspace Algorithms for the Identification of Combined Deterministic-Stochastic Systems. Automatica 1994, 30, 75–93. [Google Scholar] [CrossRef]
- Ding, F.; Liu, X.P.; Liu, G. Identification methods for Hammerstein nonlinear systems. Digit. Signal. Process. 2011, 21, 215–238. [Google Scholar] [CrossRef]
- Huang, Y.; Xiang, X.; Zhou, H. Refinement of UAV dynamics model through online identification: A model-data hybrid approach. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020. [Google Scholar]
- Wang, L.; Zhang, Y.; Cai, Y.P. Operational Mode Identification Based on Sliding Time Window Method and Eigensystem Realization Algorithm. Trans. Nanjing Univ. Aeronaut. Astronaut. 2019, 36, 838–844. [Google Scholar]
- Yan, C.; Xiang, X.; Wang, C. Fixed-Wing UAVs flocking in continuous spaces: A deep reinforcement learning approach. Robot. Auton. Syst. 2020, 131, 103594. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Xiang, X.; Zhou, H.; Tang, D.; Sun, Y. Online Identification-Verification-Prediction Method for Parallel System Control of UAVs. Aerospace 2021, 8, 99. https://doi.org/10.3390/aerospace8040099
Huang Y, Xiang X, Zhou H, Tang D, Sun Y. Online Identification-Verification-Prediction Method for Parallel System Control of UAVs. Aerospace. 2021; 8(4):99. https://doi.org/10.3390/aerospace8040099
Chicago/Turabian StyleHuang, Yixin, Xiaojia Xiang, Han Zhou, Dengqing Tang, and Yihao Sun. 2021. "Online Identification-Verification-Prediction Method for Parallel System Control of UAVs" Aerospace 8, no. 4: 99. https://doi.org/10.3390/aerospace8040099
APA StyleHuang, Y., Xiang, X., Zhou, H., Tang, D., & Sun, Y. (2021). Online Identification-Verification-Prediction Method for Parallel System Control of UAVs. Aerospace, 8(4), 99. https://doi.org/10.3390/aerospace8040099