
Tightly Coupled Integrated Navigation Algorithm for Hypersonic Boost-Glide Vehicles in the LCEF Frame



Abstract
:1. Introduction
2. Strapdown Inertial Navigation Algorithm in the LCEF Frame
2.1. Coordinate System
- The Earth-centered inertial (ECI) frame, i;
- the Earth-centered Earth-fixed (ECEF) frame, e;
- the body-fixed (BF) frame, b;
- the launch-centered Earth-fixed (LCEF) frame, g;
- the launch-centered inertial (LCI) frame, a.
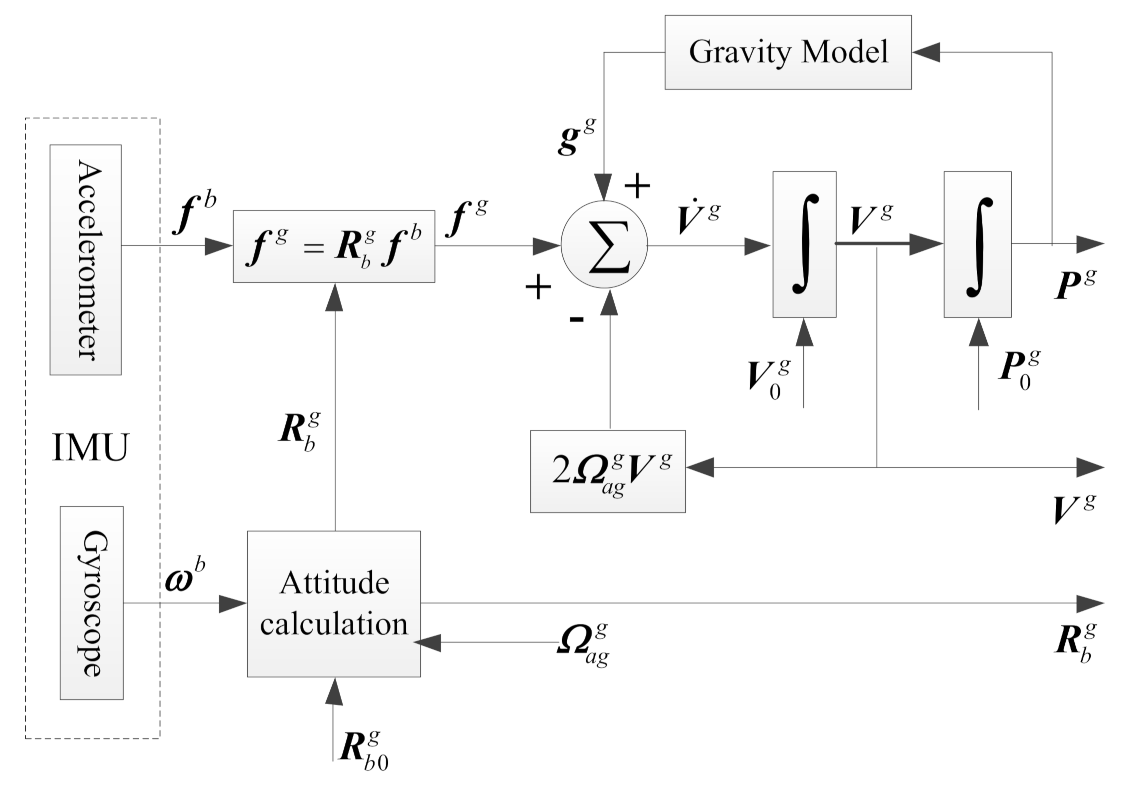
2.2. Strapdown Inertial Navigation Mechanization in the LCEF Frame
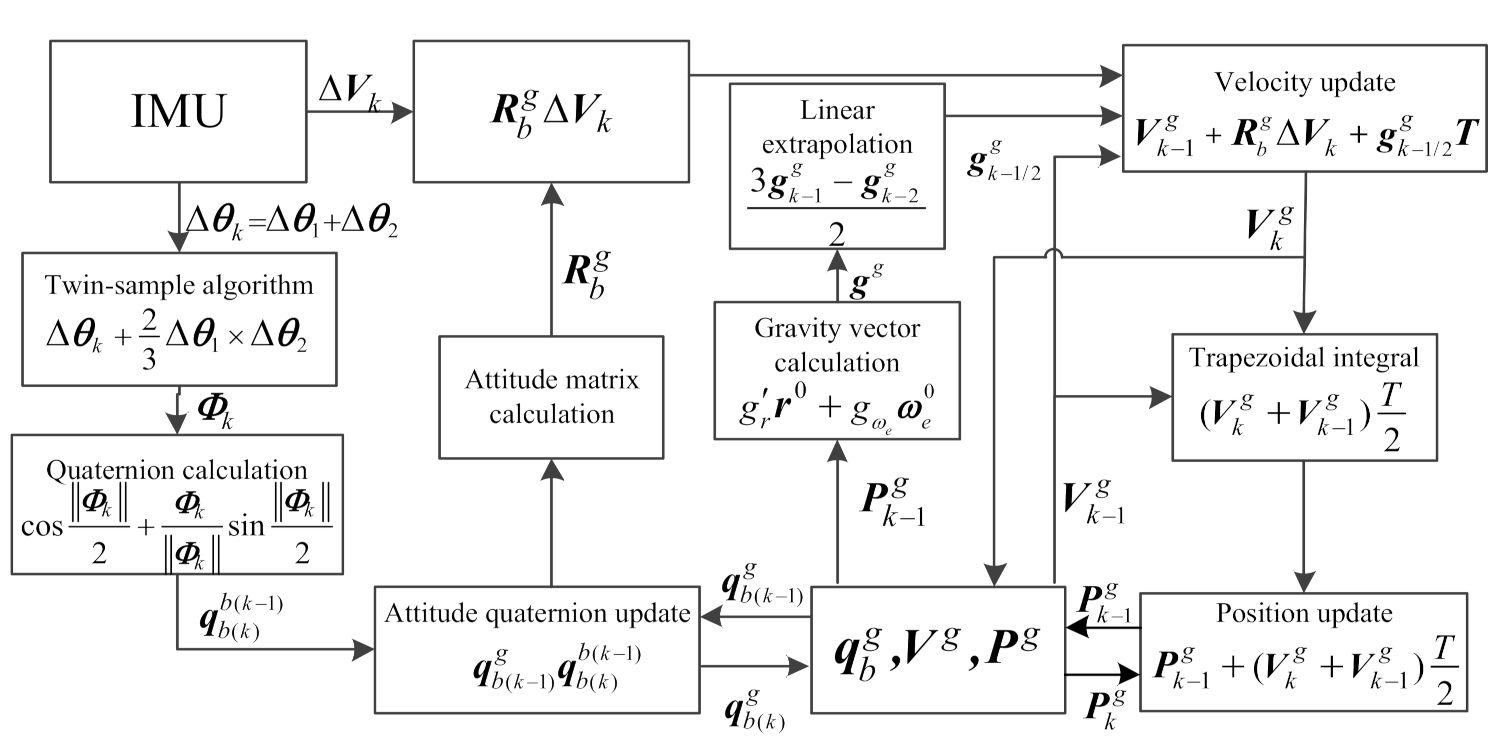
2.3. Navigation Numerical Update Algorithm
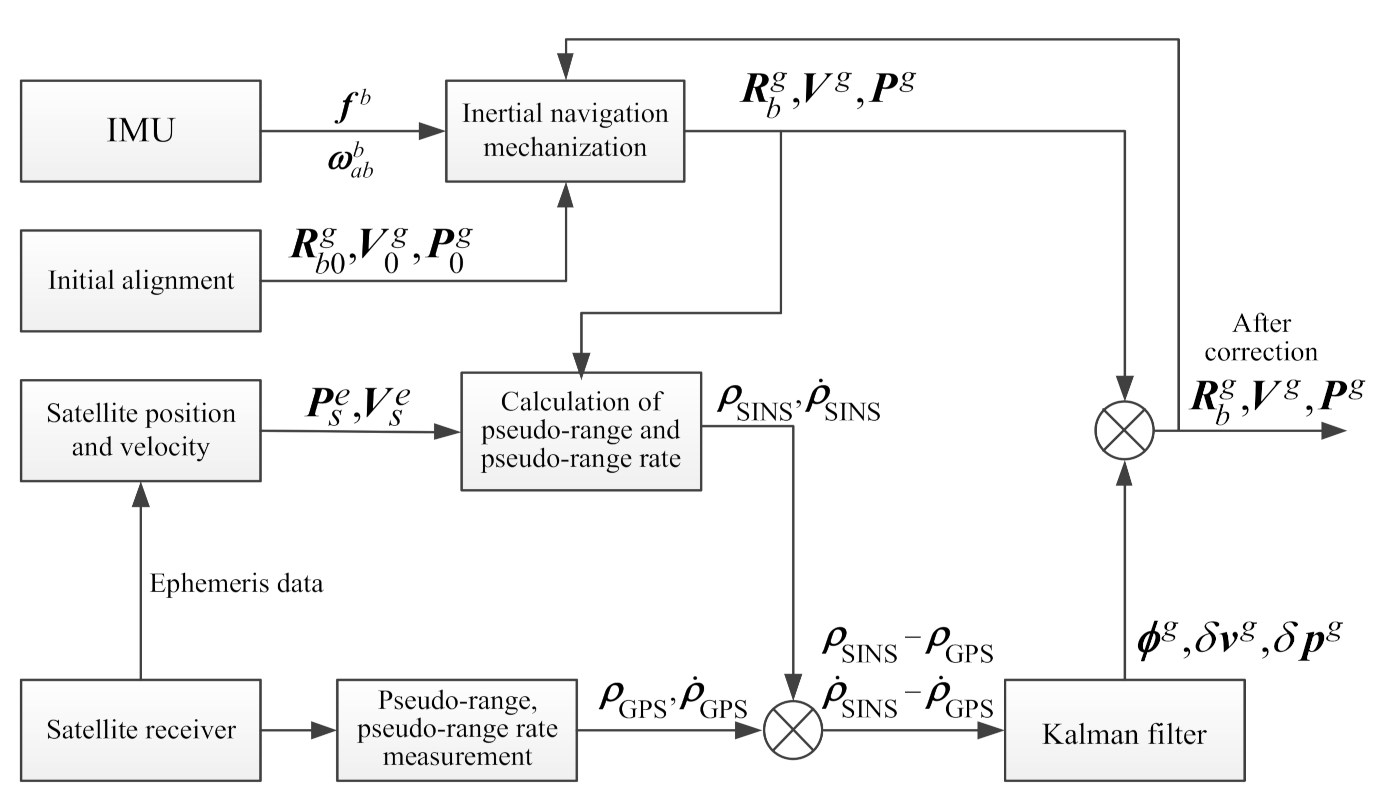
3. Tightly Coupled Integrated Navigation in the LCEF Frame
3.1. SINS Error Equation in the LCEF Frame
3.2. Tightly Coupled State Equation in the LCEF Frame
3.3. Tightly Coupled Measurement Equation in the LCEF Frame
3.3.1. Pseudo-Range Measurement Equation in the LCEF Frame
3.3.2. Pseudo-Range Rate Measurement Equation in the LCEF Frame
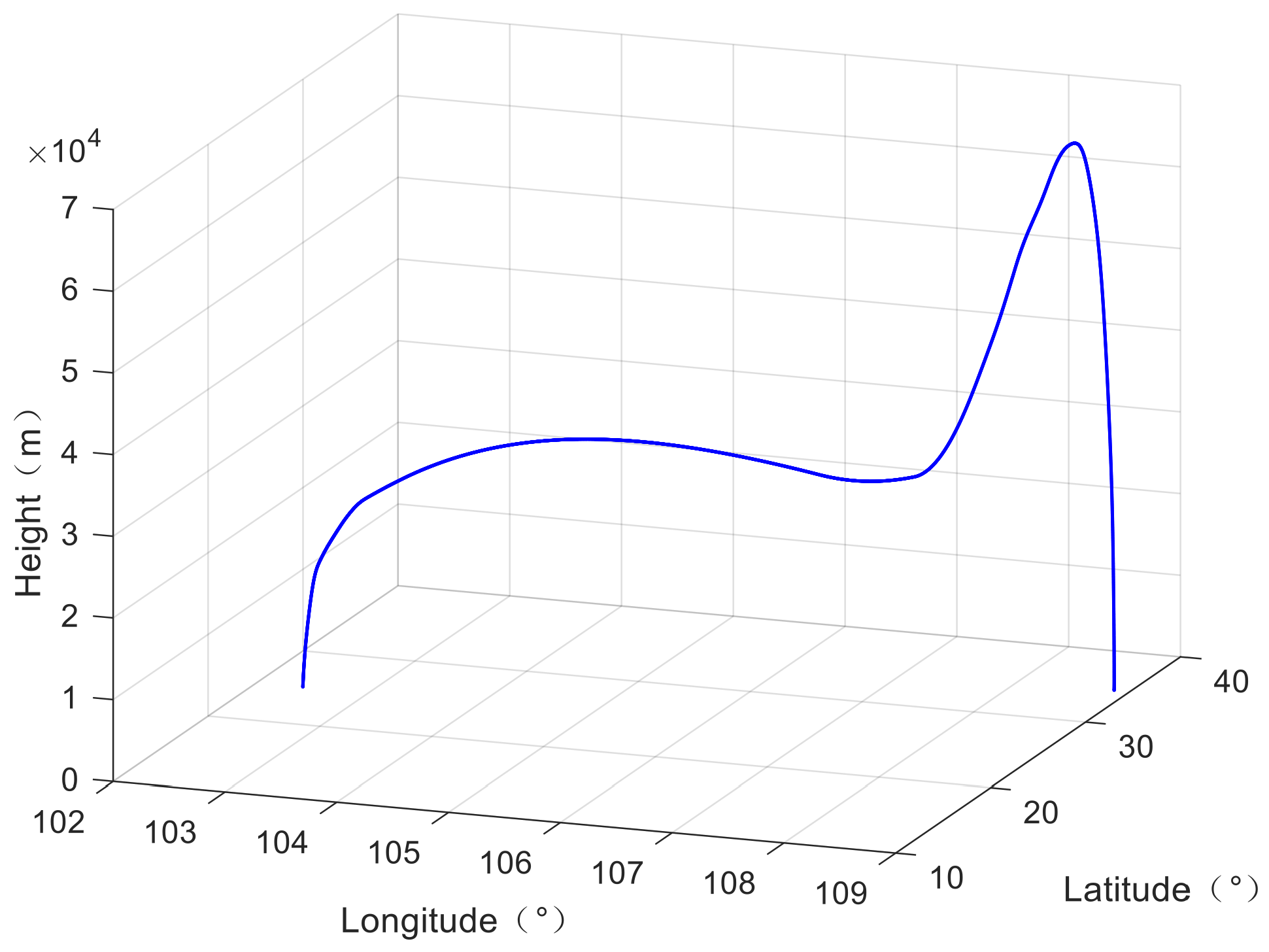
4. Simulation Verification
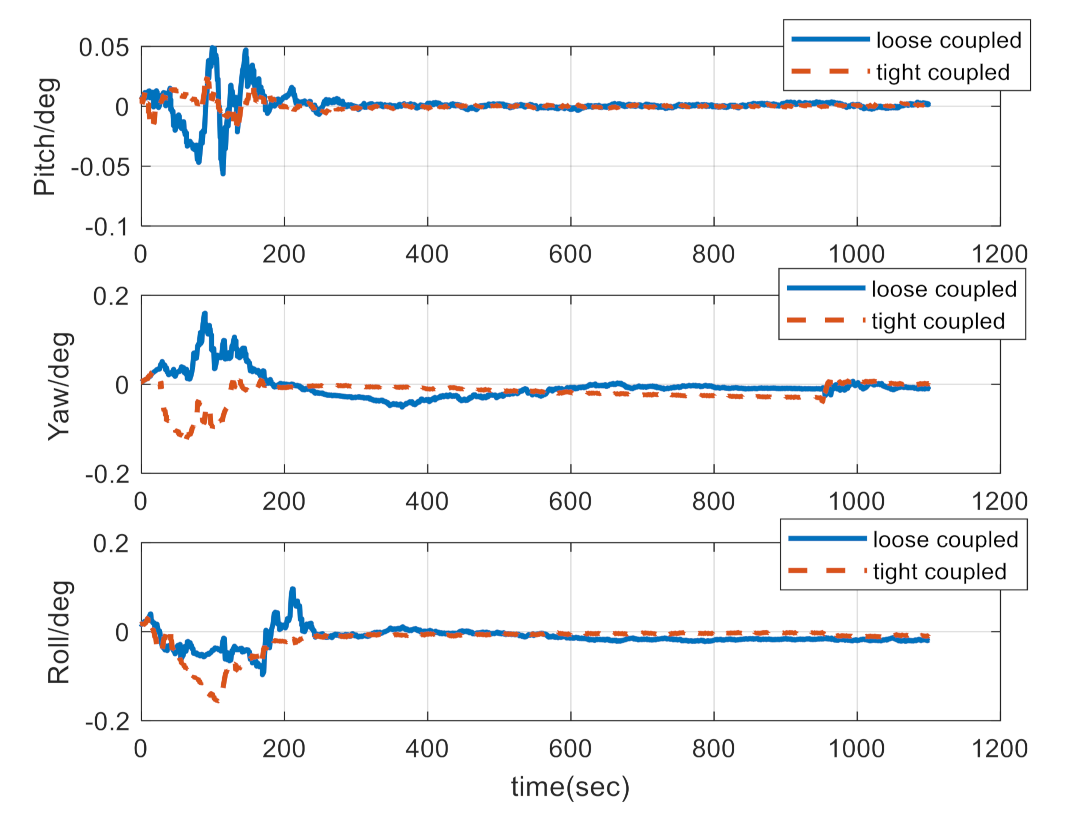
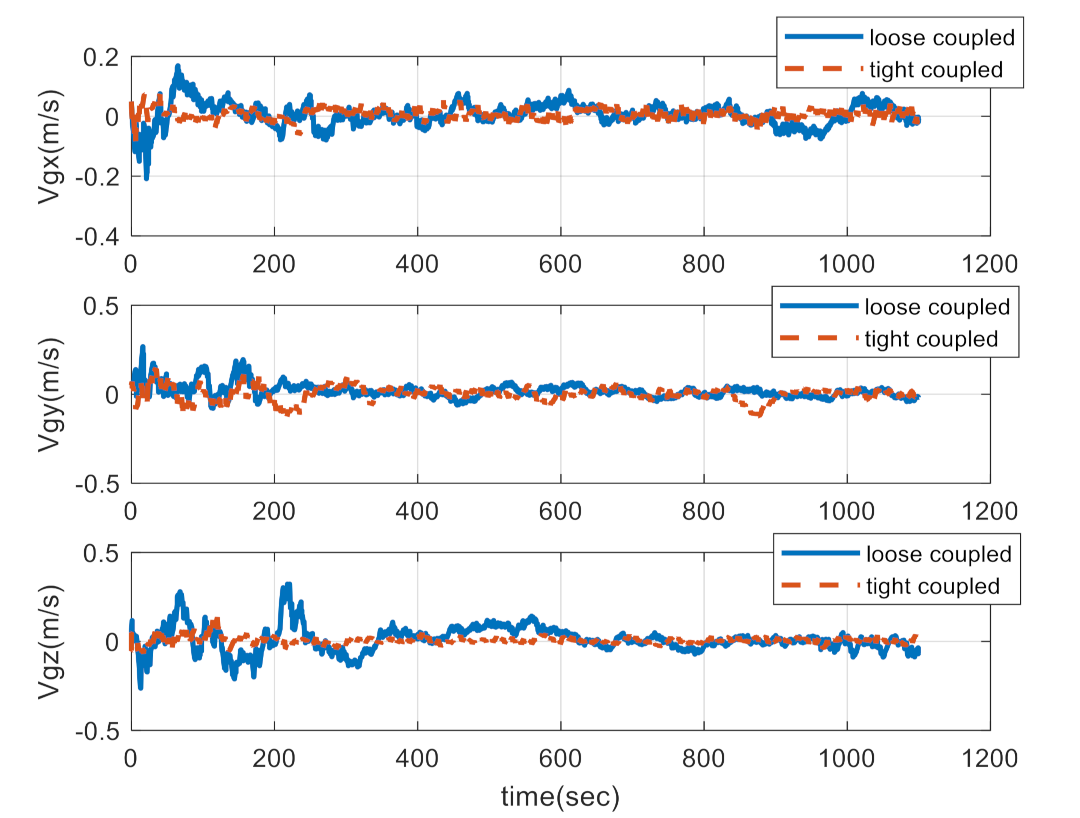
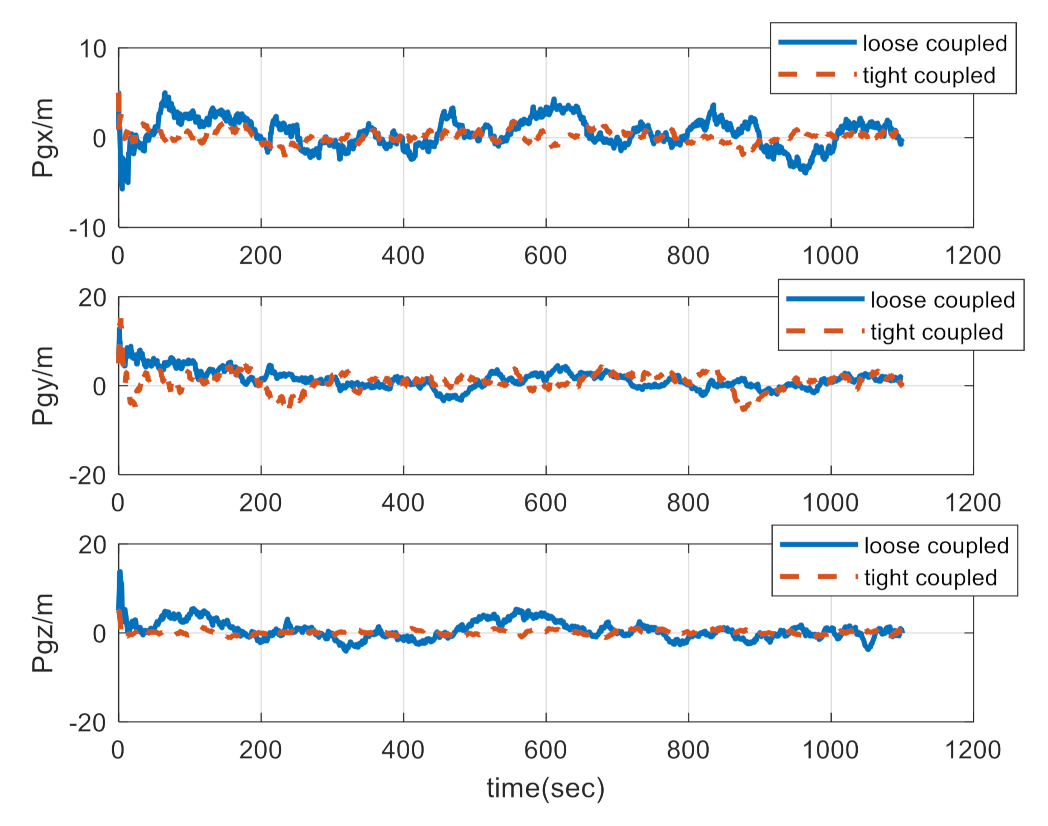
4.1. Comparison between Loose and Tight Coupling
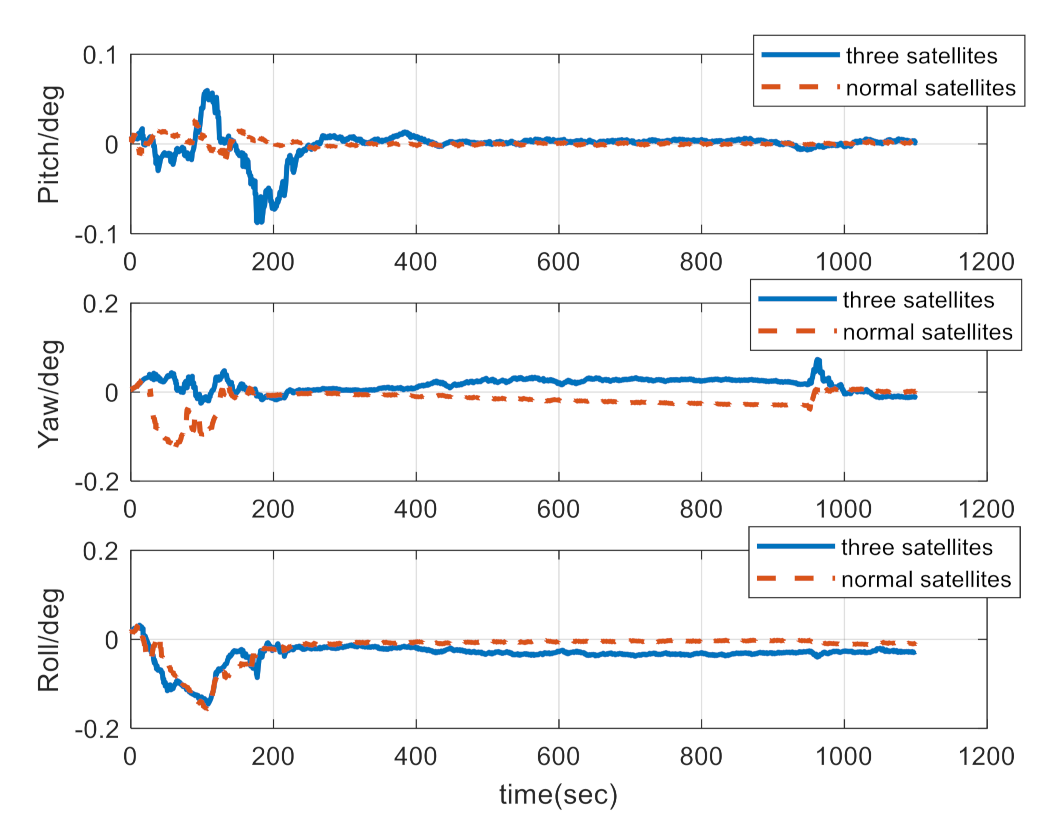
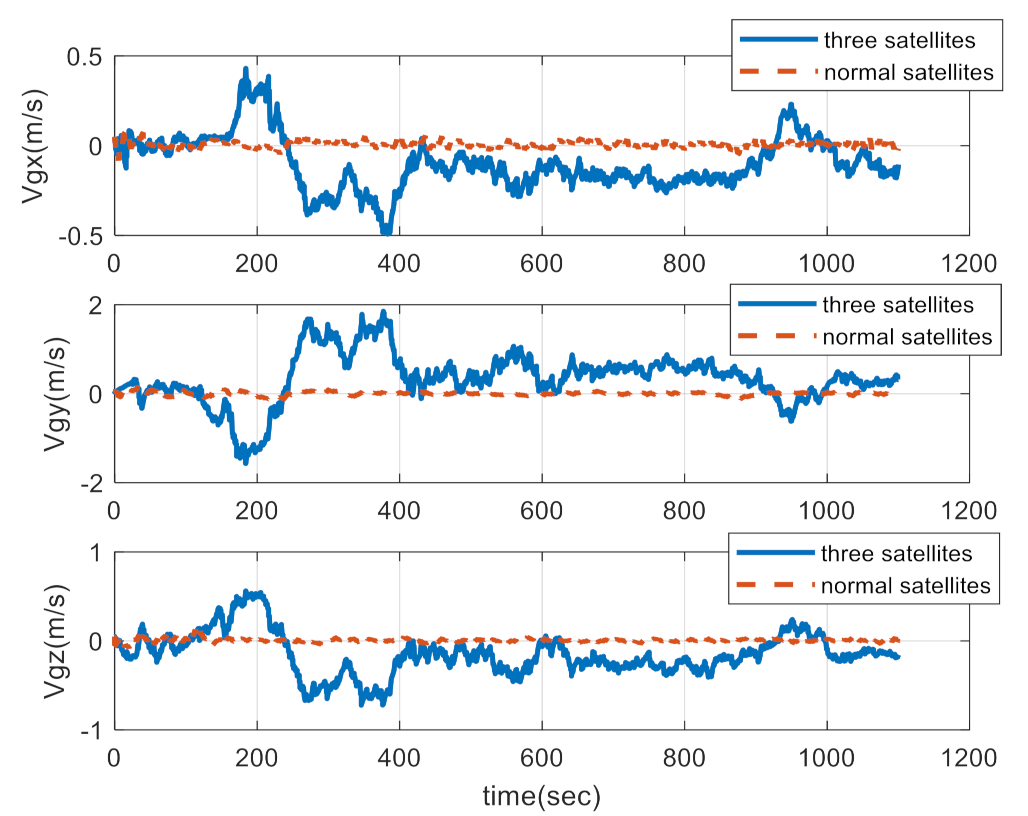
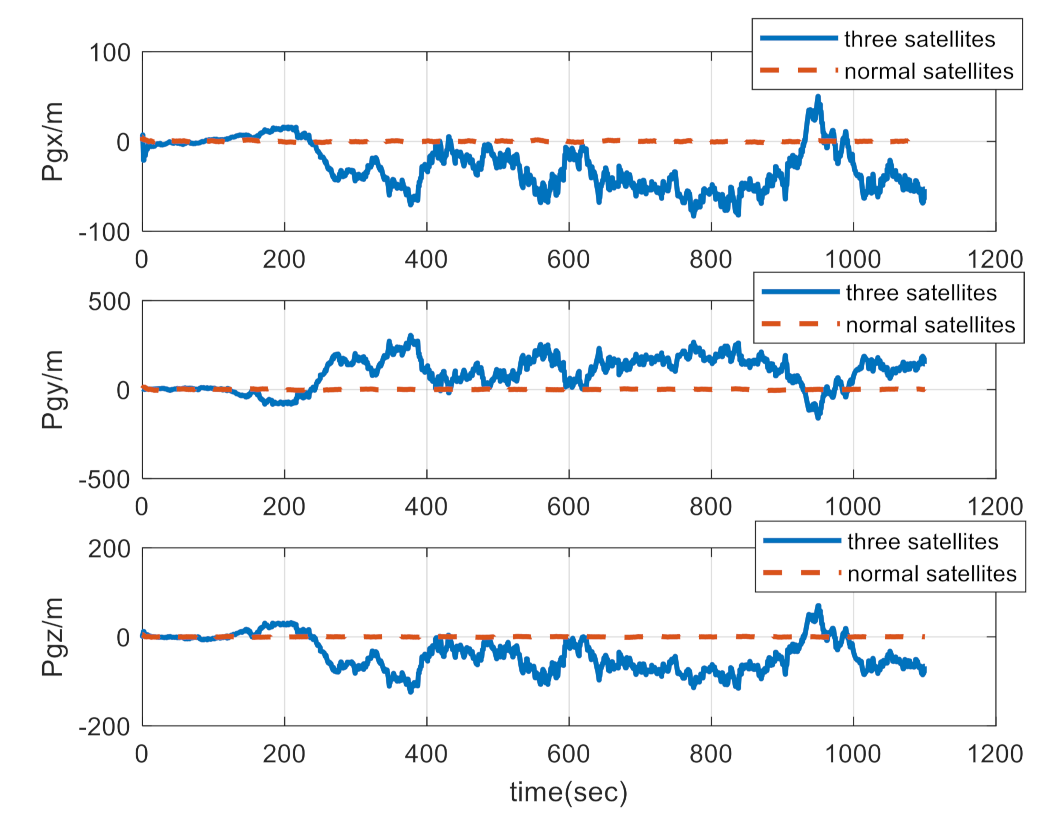
4.2. Navigation Comparison between the Normal-Number Satellite and Three-Satellite Integrated Navigation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, L.-Y.; Yong, E.-M.; Wang, B.-L. Several research advances of anti-near space hypersonic vehicle. J. Astronaut. 2020, 41, 1239–1250. [Google Scholar]
- Liu, W.; Gong, H.-H. Overview of the development history of foreign hypersonic aircraft. Aerodyn. Missile J. 2020, 3, 20–27, 59. [Google Scholar]
- Yang, Y.Q.; Zhang, C.X.; Lu, J.Z.; Zhang, H. Classification of Methods in the SINS/CNS Integration Navigation System. IEEE Access 2018, 6, 3149–3158. [Google Scholar] [CrossRef]
- Chen, K.; Shen, F.; Sun, H.; Zhou, J. Hypersonic Vehicle Navigation Algorithm in Launch Centered Earth-Fixed Frame. J. Astronaut. 2019, 40, 1212–1218. [Google Scholar]
- Bahm, C.; Baumann, E.; Martin, J.; Bose, D.; Beck, R.; Strovers, B. The X-43A Hyper-X Mach 7 Flight 2 Guidance, Navigation, and Control Overview and Flight Test Results. In Proceedings of the AIAA/CIRA 13th International Space Planes and Hypersonics Systems and Technologies Conference, Capua, Italy, 16–20 May 2005. [Google Scholar]
- David, W. Research Note to Hypersonic Boost-Glide Weapons by James M. Acton: Analysis of the Boost Phase of the HTV-2 Hypersonic Glider Tests. Sci. Glob. Secur. 2015, 23, 220–229. [Google Scholar]
- Wang, L.-P.; Zhao, S.; Jiang, C.; Guo, T. Development Trends of Foreign Hypersonic Weapons. Aerosp. Electron. Warf. 2020, 36, 61–64. [Google Scholar]
- Shen, K. Research on Tight Integrated Navigation System Based on SINS/GPS. Master’s Thesis, Nanjing University of Science and Technology, Nanjing, China, 2017. [Google Scholar]
- Zhang, H.-Y. Research on SINS/GPS Tightly Coupled Integrated Navigation of Near Space Vehicle. Master’s Thesis, Northwestern Polytechnical University, Xi’an, China, 2020. [Google Scholar]
- Dai, Q.; Sui, L.-F.; Wang, L.-X.; Zeng, T.; Tian, Y. Beidou/Inertial Navigation Fast Hybrid Gaussian UKF Algorithm. Sci. Surv. Mapp. 2018, 43, 20–25. [Google Scholar]
- Feng, G.-Z.; Liu, S.-Z.; Li, Y.; Peng, C.; Yang, X.-C.; Chen, X.-R.; Long, H. Three-dimensional integrated shore collapse monitoring technology based on GNSS/INS tight coupled. J. Yangtze River Scie. Res. Inst. 2019, 36, 94–99. [Google Scholar]
- Zhao, J.; Xu, C.-D.; Zhang, P.-F. SINS/GNSS tight coupling algorithm based on simplified SSKF. J. Syst. Eng. Electron. 2017, 39, 2529–2534. [Google Scholar]
- Yu, H.; Li, Z.; Wang, J.; Han, H. Data fusion for a GPS/INS tightly coupled positioning system with equality and inequality constraints using an aggregate constraint unscented Kalman filter. J. Spat. Sci. 2018, 65, 1–22. [Google Scholar] [CrossRef]
- Chen, K.; Shen, F.; Zhou, J.; Wu, X. SINS/BDS Integrated Navigation for Hypersonic Boost-Glide Vehicles in the Launch-Centered Inertial Frame. Math. Probl. Eng. 2020, 2020, 1–16. [Google Scholar] [CrossRef]
- Chen, K.; Zhou, J.; Shen, F.-Q.; Sun, H.-Y.; Fan, H. Hypersonic boost–glide vehicle strapdown inertial navigation system/global positioning system algorithm in a launch-centered earth-fixed frame. Aerosp. Sci. Technol. 2020, 98, 105679. [Google Scholar] [CrossRef]
- Chen, K.; Shen, F.; Zhou, J.; Wu, X. Simulation Platform for SINS/GPS Integrated Navigation System of Hypersonic Vehicles Based on Flight Mechanics. Sensors 2020, 20, 5418. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameters | Index |
|---|---|
| Gyro constant deviation/(°·h−1) | 3.0 |
| Gyro random error/(°·h−1/2) | 0.3 |
| Accelerometer constant offset/(g0) | 1 × 10−3 |
| White noise measured by accelerometer/(g0) | 1 × 10−4 |
| Initial attitude angle errors /(′′) | 20,5,5 |
| Initial velocity error/(m·s−1) | 0.01 |
| Initial position error/(m) | 5 |
| Satellite positioning precision/(m) | 15 |
| Satellite velocity measurement precision/(m·s−1) | 0.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, K.; Pei, S.; Shen, F.; Liu, S. Tightly Coupled Integrated Navigation Algorithm for Hypersonic Boost-Glide Vehicles in the LCEF Frame. Aerospace 2021, 8, 124. https://doi.org/10.3390/aerospace8050124
Chen K, Pei S, Shen F, Liu S. Tightly Coupled Integrated Navigation Algorithm for Hypersonic Boost-Glide Vehicles in the LCEF Frame. Aerospace. 2021; 8(5):124. https://doi.org/10.3390/aerospace8050124
Chicago/Turabian StyleChen, Kai, Sensen Pei, Fuqiang Shen, and Shangbo Liu. 2021. "Tightly Coupled Integrated Navigation Algorithm for Hypersonic Boost-Glide Vehicles in the LCEF Frame" Aerospace 8, no. 5: 124. https://doi.org/10.3390/aerospace8050124
APA StyleChen, K., Pei, S., Shen, F., & Liu, S. (2021). Tightly Coupled Integrated Navigation Algorithm for Hypersonic Boost-Glide Vehicles in the LCEF Frame. Aerospace, 8(5), 124. https://doi.org/10.3390/aerospace8050124