
Novel Structure and Thermal Design and Analysis for CubeSats in Formation Flying


Abstract
:1. Introduction
2. CubeSat Design
2.1. Structural Design
2.2. Analytical Model Design
2.3. Launch Environment
3. Numerical Analysis by Finite Element Analysis (FEA)
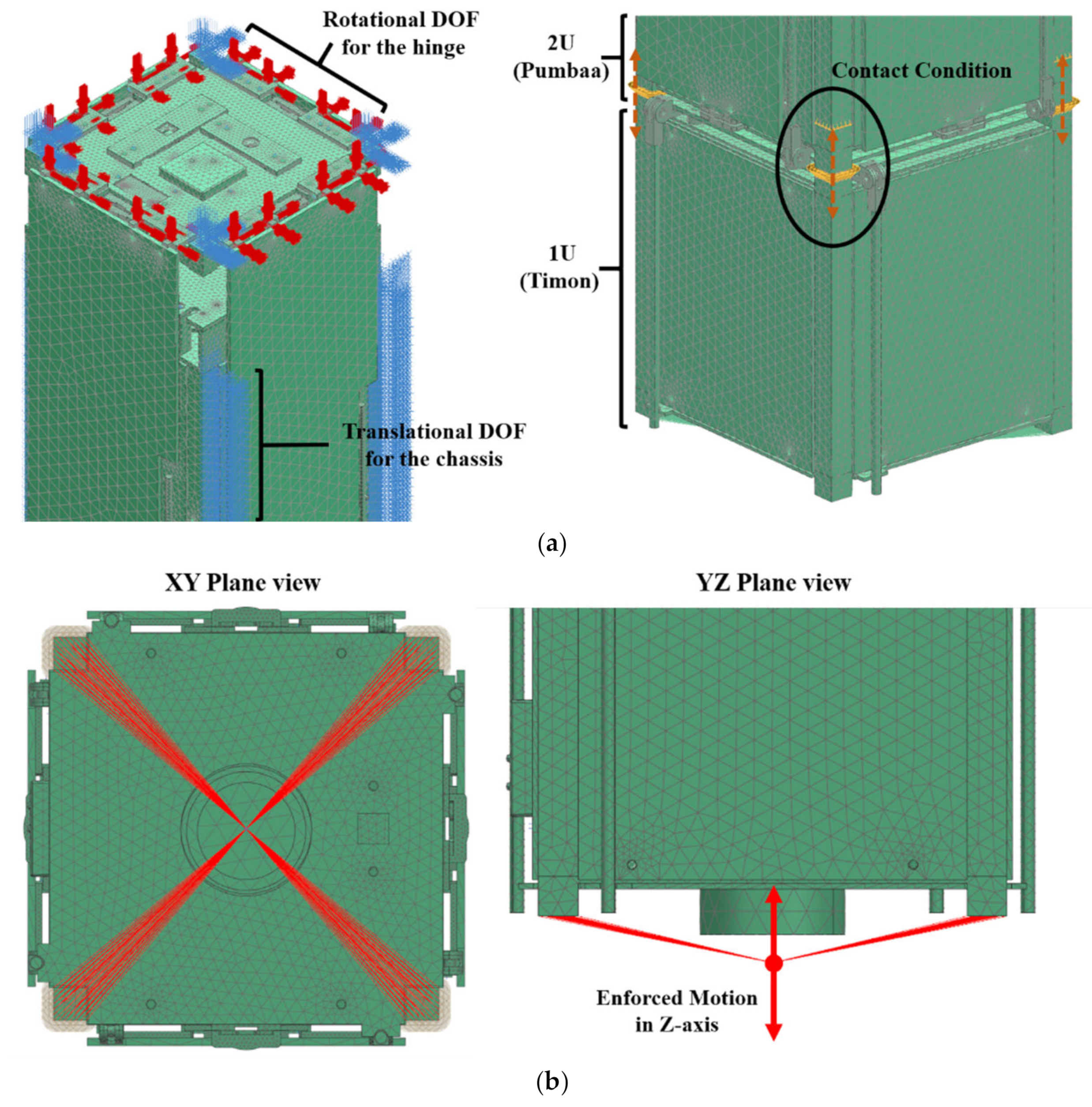
3.1. Structural Analysis
3.1.1. Pre-Processing
3.1.2. Modal Analysis
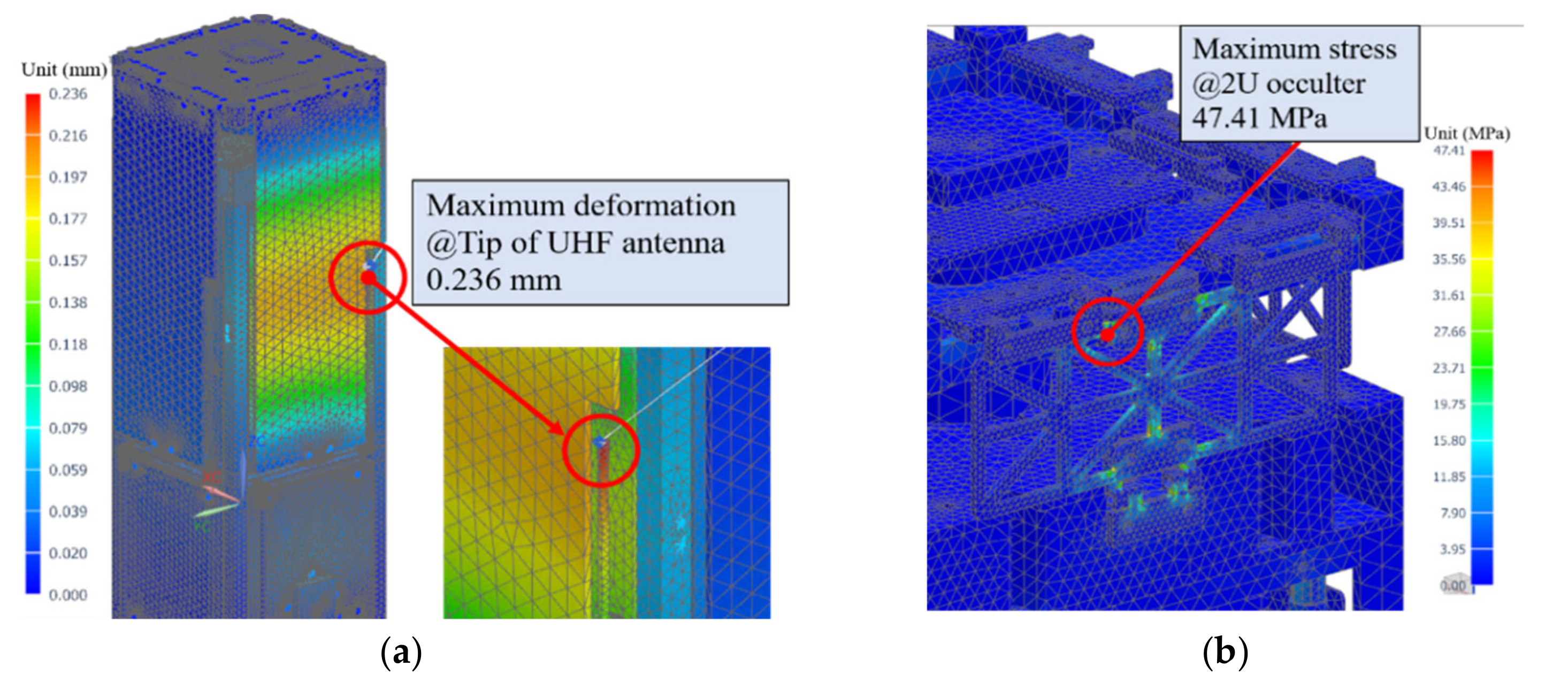
3.1.3. Quasi-Static Acceleration Analysis
3.1.4. Random Vibration Analysis
3.1.5. Shock Analysis
3.2. Thermal Analysis
3.2.1. Space Environment
3.2.2. Pre-Processing
3.2.3. Analysis Results
4. Ground Validations
4.1. Vibration Testing; Launch Environment
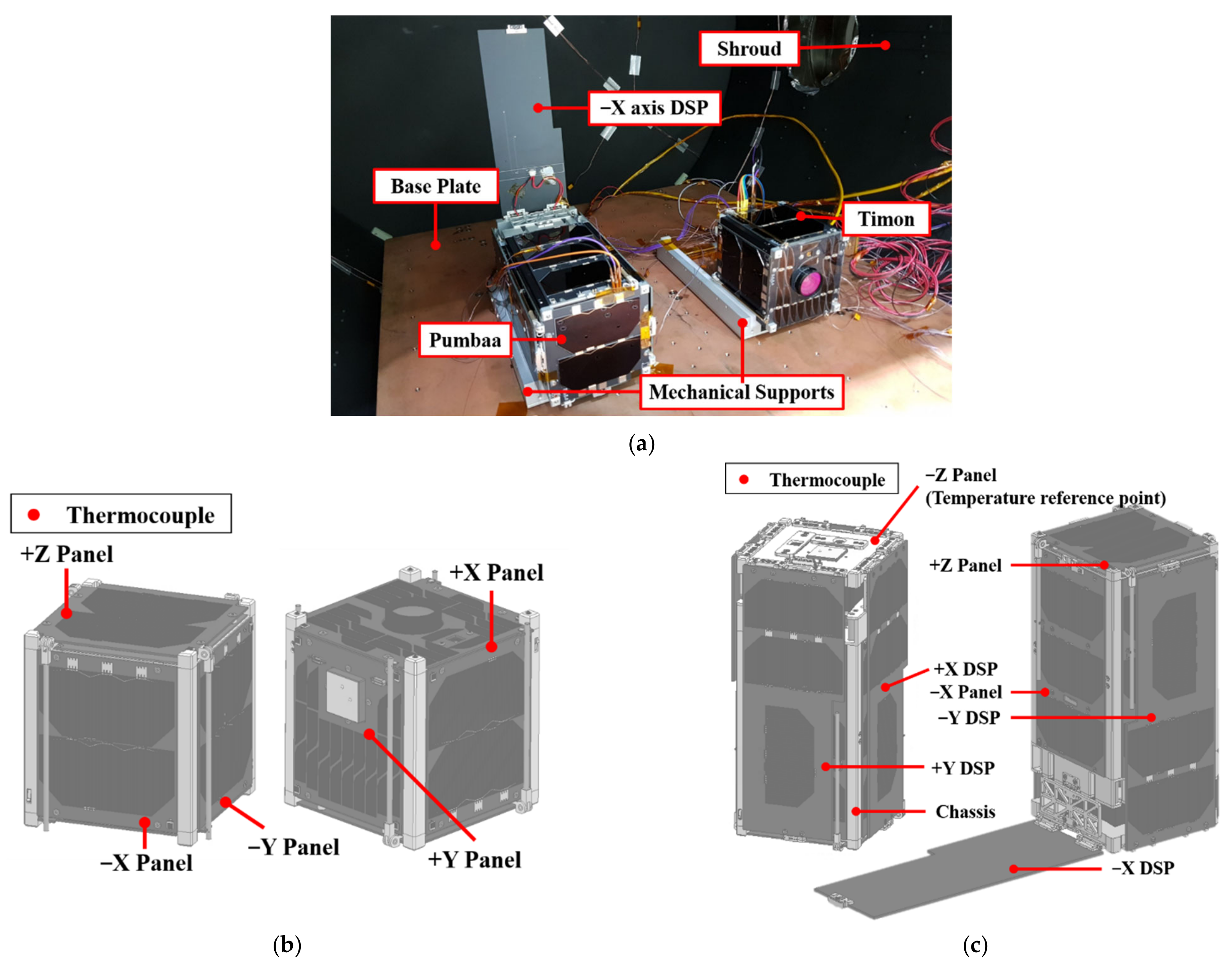
4.2. Thermal Vacuum and Cycling Test: Space Environment
5. Discussions: Environment Testing Results and Correlations
5.1. Vibration Testing
5.2. Thermal Vacuum and Cycling Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bandyopadhyay, S.; Foust, R.; Subramanian, G.P.; Chung, S.J.; Hadaegh, F.Y. Review of formation flying and constellation missions using nanosatellites. J. Spacecr. Rockets. 2016, 53, 567–578. [Google Scholar] [CrossRef] [Green Version]
- Foster, C.; Mason, J.; Vittaldev, V.; Leung, L.; Beukelaers, V.; Stepan, L.; Zimmerman, R. Constellation phasing with differential drag on planet labs satellites. J. Spacecr. Rockets. 2018, 55, 474–483. [Google Scholar] [CrossRef]
- Kang, S.; Song, Y.; Park, S.Y. Nanosat formation flying design for SNIPE mission. J. Astron. Space Sci. 2020, 37, 51–60. [Google Scholar]
- Kim, G.N.; Park, S.Y.; Kang, D.E.; Son, J.; Lee, T.; Jeon, S.; Kim, N.; Park, Y.K. Development of CubeSats for CANYVAL-C mission in formation flying. In Proceedings of the 11th Asia Pacific International Symposium on Aerospace Technology, Gold Coast, Australia, 4–6 December 2019; pp. 813–824. [Google Scholar]
- Barsoum, G.I.; Ibrahim, H.H.; Fawzy, M.A. Static and random vibration analyses of a university CubeSat project. J. Phys. Conf. Ser. 2019, 1264, 012019. [Google Scholar] [CrossRef]
- Fagerudd, J. Stress Simulation of the SEAM CubeSat Structure During Launch. Master’s Thesis, KTH Royal Institute of Technology in Stockholm, Stockholm, Sweden, 2014. Available online: https://www.diva-portal.org/smash/get/diva2:865309/FULLTEXT01.pdf (accessed on 16 May 2021).
- Israr, A. Vibration and modal analysis of low earth orbit satellite. Shock. Vib. 2014, 2014, 740102. [Google Scholar] [CrossRef] [Green Version]
- Larson, W.J.; Wertz, J.R. Thermal spacecraft subsystems. In Space Mission Analysis and Design, Space Technology Library; 3rd ed.; Microcosm Press: El Segundo, CA, USA, 1999; Volume 8. [Google Scholar]
- Tompkins, S.S. Effects of Thermal Cycling on Composite Materials for Space Structures; NASA Langley Research Center: Hampton, VA, USA, 1989.
- Kang, S.J.; Oh, H.U. On-orbit thermal design and validation of 1U standardized CubeSat of STEP Cube Lab. Int. J. Aerosp. Eng. 2016, 2016, 4213189. [Google Scholar] [CrossRef]
- Jeon, J.; Lee, S.; Yoon, S.; Seon, J.; Jin, H.; Lee, D.; Lin, R.P. Construction of a thermal vacuum chamber for environment test of triple CubeSat mission TRIO-CINEMA. J. Astron. Space Sci. 2013, 30, 335–344. [Google Scholar] [CrossRef] [Green Version]
- Nakaya, K.; Konoue, K.; Sawada, H.; Ui, K.; Okada, H.; Miyashita, N.; Iai, M.; Urabe, T.; Yamaguchi, N.; Kashiwa, M.; et al. Tokyo Tech CubeSat: CUTE-I-Design & Development of Flight Model and Future Plan. In Proceedings of the 21st International Communications Satellite Systems Conference and Exhibit, Yokohama, Japan, 15–19 April 2003; pp. 1–10. [Google Scholar]
- Bhattarai, S.; Kim, H.; Jung, S.H.; Oh, H.U. Development of pogo pin-based holding and release mechanism for deployable solar panel of CubeSat. Int. J. Aerosp. Eng. 2019, 2019, 2580865. [Google Scholar] [CrossRef]
- Furger, S. Analysis and Mitigation of the CubeSat Dynamic Environment. Master’s Thesis, California Polytechnic State University, San Luis Obispo, CA, USA, 2013. Available online: https://core.ac.uk/download/pdf/19160715.pdf (accessed on 16 May 2021).
- Merstallinger, A.; Sales, M.; Semerad, E. Assessment of Cold Welding between Separable Contact Surfaces due to Impact and Fretting under Vacuum; European Space Agency: Leiden, The Netherlands, 2009; Available online: http://esmat.esa.int/Publications/Published_papers/STM-279.pdf (accessed on 16 May 2021).
- Overlack, A.E.; Bolhuis, M.F. ISL.ISILaunch27-Environment Levels Auxiliary Payloads ISILaunch27, Innovative Space Logistics: Delft, The Netherlands, 2019; Unpublished Work.
- NASA. NASA-STD-5001, NASA Technical Standard: Structural Design and Test Factors of Safety for Spaceflight Hardware, Rev B; NASA: Washington, DC, USA, 2016.
- Jones, N. Quasi-static analysis of structural impact damage. J. Constr. Steel Res. 1995, 33, 151–177. [Google Scholar] [CrossRef]
- Molero, B. Sine Vibration Modal Frequency Response Dynamic Analysis—Enforced Motion. 2013. Available online: https://iberisa.wordpress.com/2013/11/17/53-sine-vibration-modal-frequency-response-dynamic-analysis/ (accessed on 16 May 2021).
- Shreyas, C. Thermal Analysis and Control of MIST CubeSat. Master’s Thesis, KTH Royal Institute of Technology in Stockholm, Stockholm, Sweden, 2016. Available online: https://www.diva-portal.org/smash/get/diva2:1071655/FULLTEXT02 (accessed on 16 May 2021).
- Katelyn, E.B. Thermal Analysis and Control of Small Satellites in Low Earth Orbit. Master’s Thesis, Missouri University of Science and Technology, Rolla, MO, USA, 2018. Available online: https://scholarsmine.mst.edu/cgi/viewcontent.cgi?article=8755&context=masters_theses (accessed on 16 May 2021).
- David, G.G. Spacecraft Thermal Control Handbook Volume I: Fundamental Technologies; The Aerospace Press: El Segundo, CA, USA, 2002. [Google Scholar]
- Yendler, B.; Jayne, C. Thermal Management for Small Sats; InSatConsulting: Saratoga, CA, USA, 2017; Available online: http://mstl.atl.calpoly.edu/~workshop/archive/2017/Spring/Alternates/Boris%20Yendler.pdf (accessed on 16 May 2021).
- Still, V. Thermal Control Design And Simulation of a Space Mission. Master’s Thesis, Lulea University of Technology, Lulea, Sweden, 2016. Available online: http://www.diva-portal.se/smash/get/diva2:1266370/FULLTEXT01.pdf (accessed on 16 May 2021).
- Juliette, I.B. System Study of an On-Orbit Additive Manufacturing CubeSat. Master’s Thesis, Florida Institute of Technology, Melbourne, FL, USA, 2017. Available online: https://repository.lib.fit.edu/bitstream/handle/11141/2284/BIDO-THESIS-2017.pdf (accessed on 16 May 2021).
- Chisabas, R.S.; Loureiro, G.; Lino, C.O.; Cantor, D.F. Method for CubeSat Thermal-Vacuum Cycling Test Specification. In Proceedings of the 47th International Conference on Environment Systems, Charleston, SC, USA, 16–20 July 2017; pp. 1–15. [Google Scholar]
- Jiao, Z.; Jiang, L.; Sun, J.; Huang, J.; Zhu, Y. Outgassing environment of spacecraft: An overview. IOP Conf. Ser. Mater. Sci. Eng. 2019, 611, 012071. [Google Scholar] [CrossRef] [Green Version]
- Park, T.Y.; Chae, B.G.; Oh, H.U. Development of 6U CubeSat’s deployable solar panel with burn wire triggering holding and release mechanism. Int. J. Aerosp. Eng. 2019, 2019, 012071. [Google Scholar] [CrossRef]
- Alistair, P. Combined 1UB EPS and 20Wh Battery 3rd Generation for Manned Flight ISS Compatibility Certificate of Conformance, Clyde Space: Uppsala, Sweden, 2018; Unpublished Work.
- Ian, P. 3G EPS 3UA for Manned Flight ISS Compatibility Certificate of Conformance, Clyde Space: Uppsala, Sweden, 2018; Unpublished Work.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (Hz) | Launch Environment | Random Vibration Test Profile | |||
|---|---|---|---|---|---|
| Random Vibration | Shock | First Stage | Second Stage | Upper Stage | |
| Acceleration Spectral Density (g2/Hz) | Amplitude (g) | Acceleration Spectral Density (g2/Hz) | |||
| 20–100 | 0.01 | N/A | 0.02 | 0.02 | 0.004 |
| 100–200 | 0.01–0.025 | 30–60 | 0.02–0.05 | 0.02 | 0.004 |
| 200–500 | 0.025 | 60–255 | 0.05 | 0.02–0.008 | 0.004 |
| 500–1000 | 0.025–0.013 | 255–750 | 0.05–0.025 | 0.008–0.004 | 0.004 |
| 1000–2000 | 0.013–0.006 | 750 | 0.025–0.013 | 0.004–0.002 | 0.004–0.002 |
| 2000–5000 | N/A | 750–1500 | N/A | N/A | N/A |
| Acceleration (GRMS) | N/A | N/A | 7.42 | 3.58 | 2.59 |
| Duration (s/axis) | N/A | N/A | 60.0 | 240.0 | 437.5 |
| Axis | Maximum Deformation | Maximum Stress | ||||
|---|---|---|---|---|---|---|
| Location | Deformation (mm) | Location | Material | Stress (MPa) | MoS | |
| X | 2U UHF antenna | 0.24 | 2U Payload | Al 6061 | 46.20 | 1.99 |
| Y | 2U UHF antenna | 0.22 | 2U Payload | Al 6061 | 47.40 | 1.91 |
| Z | 1U OBC spacer | 0.04 | 1U Board supporting rod | SS 304 | 11.40 | 11.1 |
| Axis | Random Vibration Analysis | Shock Analysis | ||||||
|---|---|---|---|---|---|---|---|---|
| Location | Material | Stress (MPa) | MoS | Location | Material | Stress (MPa) | MoS | |
| X | 2U Board supporting rod | SS 304 | 34.20 | 3.04 | 2U Board supporting rod | SS 304 | 129.60 | 0.07 |
| Y | 2U Board supporting rod | SS 304 | 37.22 | 2.71 | 2U Deployment device | Al 6061 | 122.20 | 0.13 |
| Z | 2U Solar array | FR-4 | 1.522 | 78.4 | 2U Hinge | Al 6061 | 7.54 | 17.30 |
| Materials | Thermal-Physical Properties | Thermal-Optical Properties | |||
|---|---|---|---|---|---|
| Density (kg/m3) | Conductivity (W/m·K) | Specific Heat (J/kg·K) | Emissivity (ε) | Solar Absorptivity (α) | |
| Al 6061 | 2711 | 154.3 | 896 | 0.07 | 0.35 |
| FR-4 | 1850 | 0.3 | 1300 | 0.6 | 0.6 |
| SS 304 | 7900 | 16.3 | 500 | 0.15 | 0.5 |
| Copper | 8920 | 387 | 385 | 0.03 | 0.3 |
| Hear Sources | Components | Maximum Power Consumption (W) | |
|---|---|---|---|
| 1U | 2U | ||
| Operation of electrical components | PCDU | 0.20 | |
| Battery | 0.10 | ||
| MTQ | 0.75 | ||
| GNSS receiver | 1.50 | ||
| UHF transceiver | 0.25 | ||
| OBC | 0.50 | 0.70 | |
| RWA | N/A | 1.80 | |
| PPS | N/A | 0.20 | |
| Active thermal control | Battery heater | 0.40 | 0.60 |
| PPS tank heater | N/A | 1.5 | |
| Subsystem | Components | Survival Temperature (°C) | Analysis Results (°C) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Operating | Storage | Timon (1U) | Pumbaa (2U) | ||||||||||
| Normal Mode | Mission Mode | Normal Mode | Mission Mode | ||||||||||
| Min. | Max. | Min. | Max. | Min. | Max. | Min. | Max. | Min. | Max. | Min. | Max. | ||
| PAY (Payload) | Visible camera | 0 | +60 | −40 | +85 | +3.3 | +17.1 | −0.4 | +10.9 | N/A | N/A | ||
| Occulter board | −40 | +85 | −40 | +85 | N/A | N/A | −0.8 | +34.1 | −5.6 | +27.6 | |||
| CNDH (Command and Data Handling) | OBC | −40 | +85 | −40 | +85 | +1.5 | +21.9 | −8.8 | +3.0 | +14.3 | +25.5 | +2.2 | +7.3 |
| AOCS (Attitude and Orbit Control) | MTQ | −40 | +70 | −40 | +85 | −19.1 | +31.1 | −24.1 | +12.7 | −22.7 | +55.6 | −31.8 | +7.8 |
| Sun sensor | −40 | +85 | −40 | +85 | −18.0 | +31.1 | −24.0 | +12.8 | −0.9 | +33.6 | −5.6 | +29.4 | |
| RWA | −20 | +60 | −20 | +85 | N/A | N/A | +6.7 | +26.9 | −4.1 | +6.7 | |||
| GNSS antenna | −40 | +85 | −40 | +85 | −18.0 | +30.9 | −24.0 | +12.6 | −0.9 | +33.8 | −5.6 | +29.2 | |
| GNSS receiver | −40 | +85 | −55 | +95 | +9.1 | +16.0 | −6.5 | −3.1 | +15.8 | +23.8 | +3.7 | +7.5 | |
| PPS tank | 0 | +50 | −40 | +85 | N/A | N/A | +12.8 | +23.0 | +10.9 | +16.1 | |||
| COMS (Communications) | UHF antenna | −40 | +85 | −40 | +85 | −18.0 | +35.0 | −25.4 | +11.6 | −4.7 | +30.4 | −13.9 | +12.4 |
| UHF transceiver | −30 | +85 | −30 | +85 | +10.2 | +18.9 | −5.6 | −1.7 | +15.7 | +24.2 | +4.0 | +7.9 | |
| EPS (Electrical Power) | PCDU | −40 | +85 | −50 | +100 | −1.8 | +18.7 | −7.5 | +6.0 | −1.3 | +23.5 | −12.5 | +5.6 |
| Battery Assembly | −10 | +50 | −20 | +60 | +5.1 | +12.8 | +1.2 | +5.8 | +9.1 | +18.7 | +0.7 | +5.7 | |
| Solar array | −100 | +150 | N/A | −40.0 | +79.8 | −65.4 | +87.1 | −74.5 | +68.3 | −57.2 | +87.6 | ||
| SMS (Structure and Mechanism) | Chassis | N/A | N/A | −19.1 | +31.1 | −24.0 | +12.7 | −1.6 | +34.0 | −7.1 | +21.9 | ||
| Vibration Simulator | Accelerometer | |||
|---|---|---|---|---|
| Model | STI DC-8000 | LDS -V984 | Model | PCB 356B21 |
| Frequency range (Hz) | 5–2500 | 5–2000 | Frequency range (Hz) | 2–10,000 |
| Sine force (kN) | 78.4 | 160.1 | Sensitivity (mV/G) | 10 |
| Random force (kNRMS) | 78.4 | 160.1 | Measurement range (Gpk) | ±500 |
| Maximum acceleration (m/s2) | 980 | 981 | Resonant frequency (kHz) | ≥55 |
| Maximum velocity (m/s) | 2.0 | 1.5 | Broadband resolution (GRMS) | 0.004 |
| Axis | X | Y | Z | |
|---|---|---|---|---|
| 1st mode natural frequency | Numerical analysis | 122.0 Hz | 120.6 Hz | 120.6 Hz |
| First LLSS test | 105.5 Hz | 91.9 Hz | 156.6 Hz | |
| Final LLSS test | 108.1 Hz | 74.3 Hz | 153.2 Hz | |
| Natural frequency change | Numerical analysis/First LLSS test | −13.5% | −23.8% | +29.9% |
| First/Final LLSS test | +2.5% | −19.2% | −2.2% | |
| Components | Temperature (°C) | ||||
|---|---|---|---|---|---|
| `Timon | Pumbaa | ||||
| Min. | Max. | Min. | Max. | ||
| Panel | −X | −11.0 | 50.0 | −9.0 | 47.0 |
| +X | −13.0 | 55.0 | −4.0 | 46.0 | |
| +Z | −14.0 | 50.0 | −12.0 | 49.0 | |
| DSP | −X | N/A | N/A | −38.7 | 53.9 |
| −Y | N/A | N/A | −22.9 | 48.5 | |
| Battery | 8.0 | 63.5 | 4.3 | 49.4 | |
| PCDU | 10.6 | 65.8 | 4.7 | 52.0 | |
| OBC | 9.0 | 70.0 | 0 | 50.0 | |
| RWA | N/A | N/A | 12.5 | 51.3 | |
| PPS | N/A | N/A | 0 | 47.0 | |
| Chassis | N/A | N/A | 10.4 | 30.6 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, Y.-K.; Kim, G.-N.; Park, S.-Y. Novel Structure and Thermal Design and Analysis for CubeSats in Formation Flying. Aerospace 2021, 8, 150. https://doi.org/10.3390/aerospace8060150
Park Y-K, Kim G-N, Park S-Y. Novel Structure and Thermal Design and Analysis for CubeSats in Formation Flying. Aerospace. 2021; 8(6):150. https://doi.org/10.3390/aerospace8060150
Chicago/Turabian StylePark, Yeon-Kyu, Geuk-Nam Kim, and Sang-Young Park. 2021. "Novel Structure and Thermal Design and Analysis for CubeSats in Formation Flying" Aerospace 8, no. 6: 150. https://doi.org/10.3390/aerospace8060150
APA StylePark, Y. -K., Kim, G. -N., & Park, S. -Y. (2021). Novel Structure and Thermal Design and Analysis for CubeSats in Formation Flying. Aerospace, 8(6), 150. https://doi.org/10.3390/aerospace8060150