
Adaptive Tracking Method for Non-Cooperative Continuously Thrusting Spacecraft


Abstract
:1. Introduction
2. Basic Models for Maneuvering Target Tracking
2.1. Relative Dynamics Model
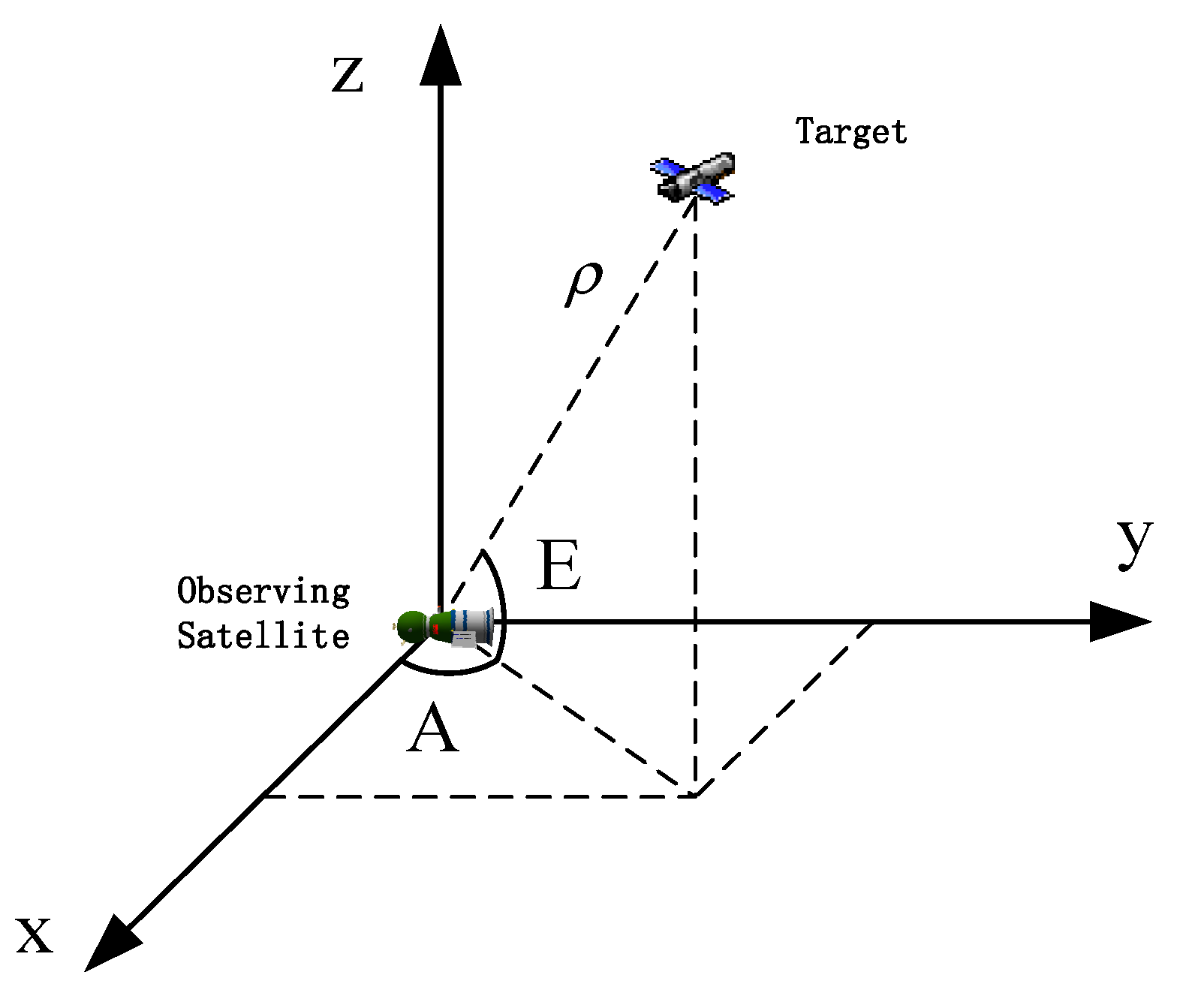
2.2. Coordinate System and Observation Model
2.3. Maneuvering Acceleration Model
3. Adaptive Tracking Algorithm for Continuously Thrusting Spacecraft
3.1. Introduction to CSJerk-Based EKF Filtering
- (1)
- The prediction of relative statewhere and are associated with Equations (A3) and (A4) in Appendix A.
- (2)
- The covariance matrix
- (1)
- The gain matrix
- (2)
- The estimations and .
3.2. Improved CSJerk Filtering Algorithm Based on Residual-Normalized Orthogonalization
3.3. IMM Algorithm Based on RCSJF
4. Results
4.1. Simulation Setups
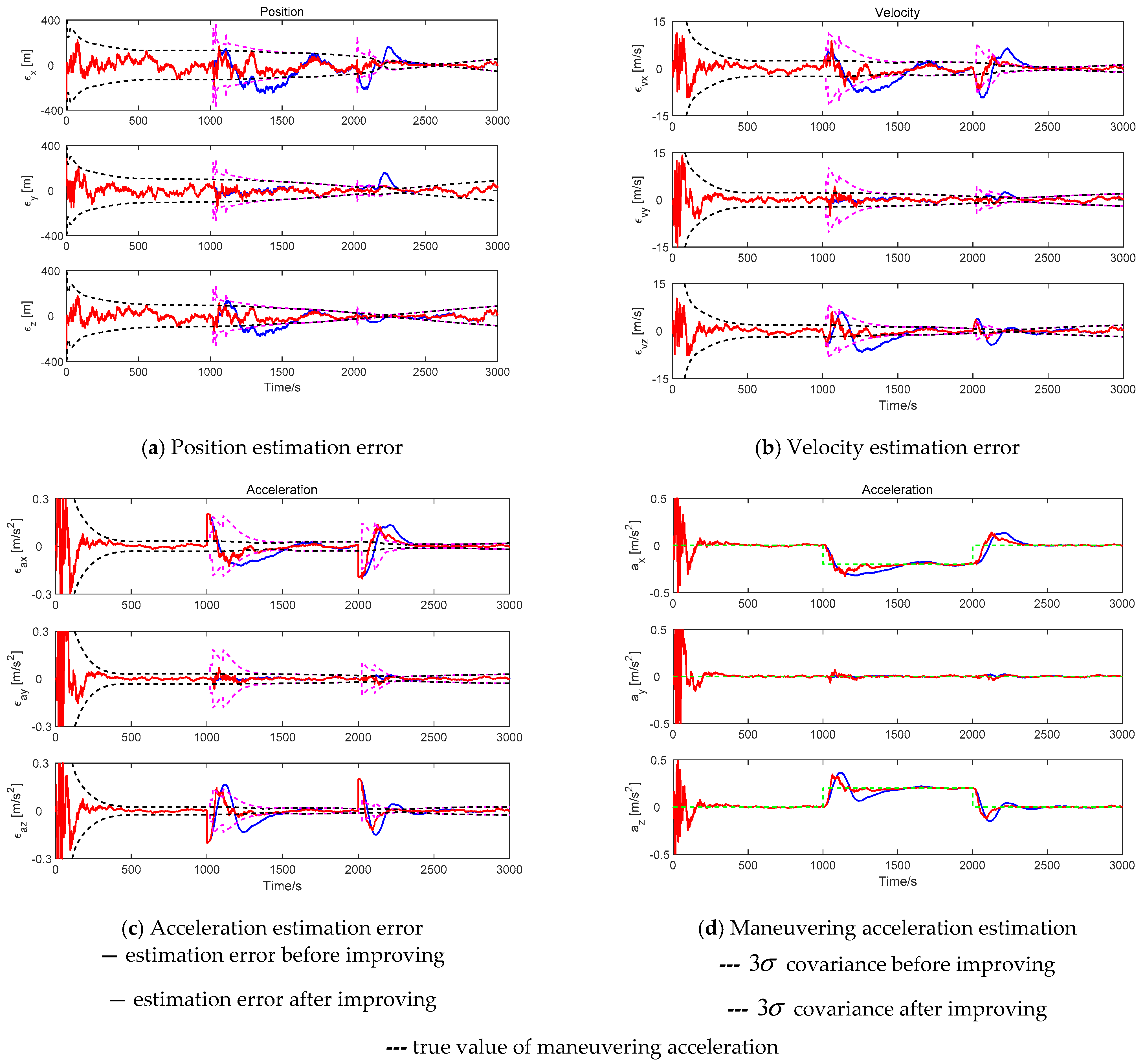
4.2. Analysis of the Residual-Normalized Orthogonalization
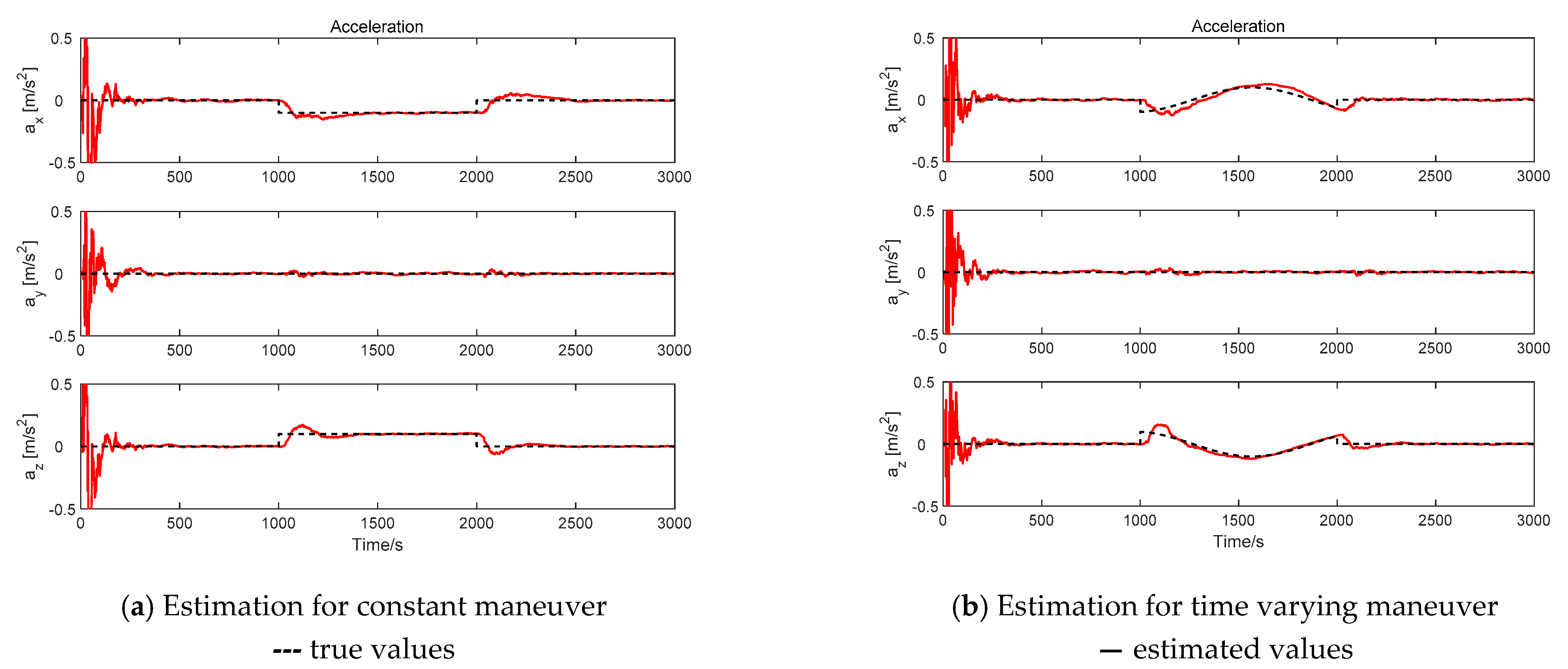
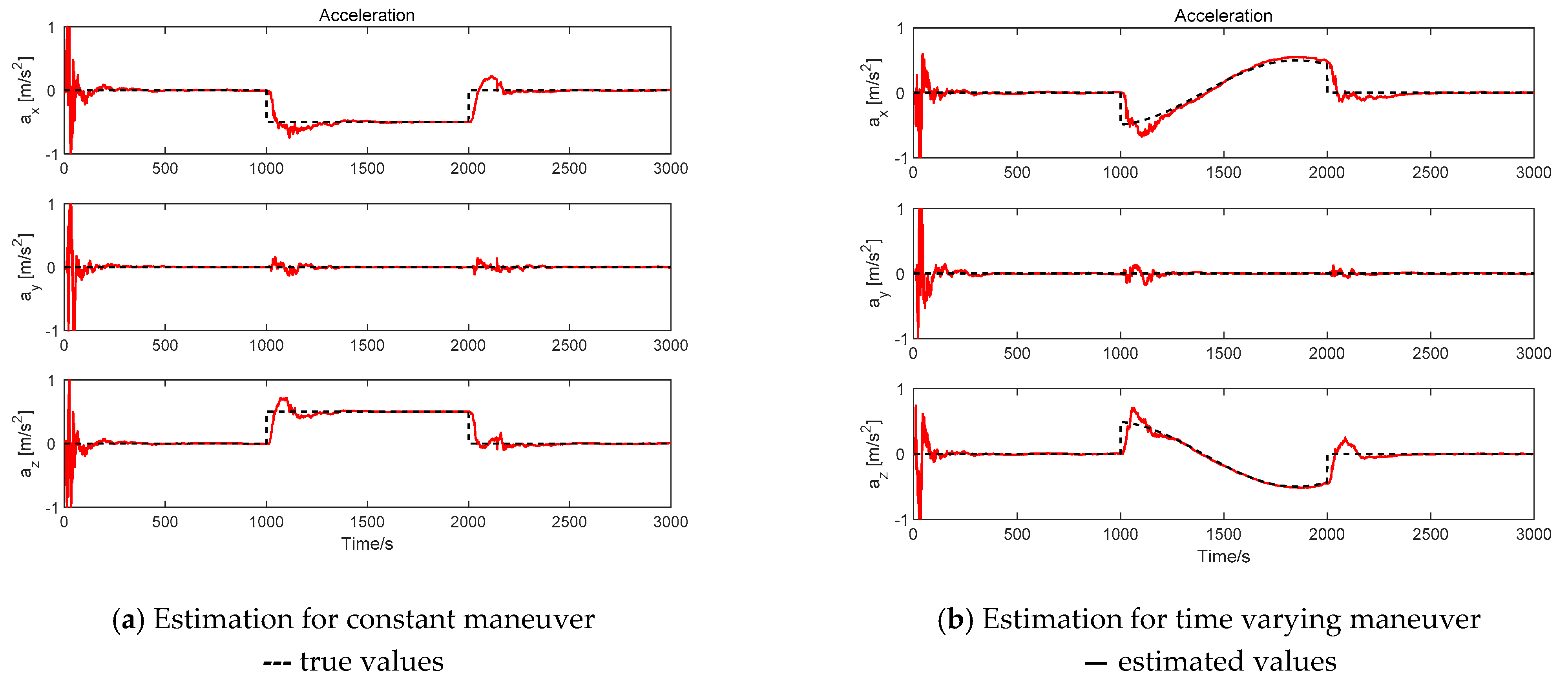
4.3. Analysis of the IMM Algorithm Based on RCSJF
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Ho, C.C.; McClamroch, N.H. Automatic spacecraft docking using computer vision-based guidance and control techniques. J. Guid. Control Dyn. 1993, 16, 281–288. [Google Scholar] [CrossRef] [Green Version]
- Philip, N.K.; Ananthasayanam, M.R. Relative position and attitude estimation and control schemes for the final phase of an autonomous docking mission of spacecraft. Acta Astronaut. 2003, 52, 511–522. [Google Scholar] [CrossRef]
- Zhou, J.P. Space Rendezvouse and Docking Technology, 1st ed.; National Defense Industry Press: Beijing, China, 2013; pp. 179–185. (In Chinese) [Google Scholar]
- Shoemaker, J.; Wright, M. Orbital express space operations architecture program. In Proceedings of the Spacecraft Platforms and Infrastructure, Orlando, FL, USA, 30 August 2004; Volume 5419, pp. 57–65. [Google Scholar]
- Available online: https://directory.eoportal.org/web/eoportal/satellite-missions/m/mev-1 (accessed on 12 June 2021).
- Carr, R.W.; Cobb, R.G.; Pachter, M.; Pierce, S. Solution of a Pursuit–Evasion Game Using a Near-Optimal Strategy. J. Guid. Control Dyn. 2018, 41, 1–10. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, H.; Yang, Z. Saddle Point of Orbital Pursuit-Evasion Game Under J 2-Perturbed Dynamics. J. Guid. Control Dyn. 2020, 43, 1733–1739. [Google Scholar] [CrossRef]
- Holzinger, M.; Scheeres, D. Applied reachability for space situational awareness and safety in spacecraft proximity operations. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009. [Google Scholar]
- Wen, C.; Peng, C.; Gao, Y. Reachable domain for spacecraft with ellipsoidal Delta-V distribution. Astrodynamics 2018, 2, 265–288. [Google Scholar] [CrossRef]
- Bobrinsky, N.; Del Monte, L. The space situational awareness program of the European Space Agency. Cosm. Res. 2010, 48, 392–398. [Google Scholar] [CrossRef]
- Gates, R.M.; Clapper, J.R. National Security Space Strategy Unclassified Summary; US Department of Defense and Office of the Director of National Intelligence: Washington, DC, USA, 2011.
- Kennewell, J.A.; Vo, B.N. An overview of space situational awareness. In Proceedings of the 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013; pp. 1029–1036. [Google Scholar]
- Verspieren, Q. The United States Department of Defense space situational awareness sharing program: Origins, development and drive towards transparency. J. Space Saf. Eng. 2021, 8, 86–92. [Google Scholar] [CrossRef]
- Gaias, G.; D’Amico, S.; Ardaens, J.S. Angles-only navigation to a noncooperative satellite using relative orbital elements. J. Guid. Control Dyn. 2014, 37, 439–451. [Google Scholar] [CrossRef] [Green Version]
- Gong, B.; Li, W.; Li, S.; Ma, W.; Zheng, L. Angles-only initial relative orbit determination algorithm for non-cooperative spacecraft proximity operations. Astrodynamics 2018, 2, 217–231. [Google Scholar] [CrossRef]
- Ardaens, J.S.; Gaias, G. Flight demonstration of spaceborne real-time angles-only navigation to a noncooperative target in low earth orbit. Acta Astronaut. 2018, 153, 367–382. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Huang, P.; Song, K.; Meng, Z. An angles-only navigation and control scheme for noncooperative rendezvous operations. IEEE Trans. Ind. Electron. 2019, 66, 8618–8627. [Google Scholar] [CrossRef]
- Goff, G.M.; Black, J.T.; Beck, J.A. Tracking maneuvering spacecraft with filter-through approaches using interacting multiple models. Acta Astronaut. 2015, 114, 152–163. [Google Scholar] [CrossRef]
- Lee, S.; Lee, J.; Hwang, I. Interacting multiple model estimation for spacecraft maneuer detection and characterization. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Jiang, Y.Z.; Baoyin, H. Robust extended Kalman filter with input estimation for maneuver tracking. CJA. 2018, 31, 1910–1919. [Google Scholar] [CrossRef]
- Goff, G.M.; Black, J.T.; Beck, J.A. Orbit estimation of a continuously thrusting spacecraft using variable dimension filters. J. Guid. Control Dyn. 2015, 38, 2407–2420. [Google Scholar] [CrossRef]
- Kelecy, T.; Jah, M. Detection and orbit determination of a satellite executing low thrust maneuvers. Acta Astronaut. 2010, 66, 798–809. [Google Scholar] [CrossRef]
- Jiang, Y.; Baoyin, H.; Ma, P. Augmented unbiased minimum-variance input and state estimation for tracking a maneuvering satellite. Acta Astronaut. 2019, 163, 96–107. [Google Scholar] [CrossRef]
- Zhai, G.; Bi, X.Z.; Zhao, H.Y.; Liang, B. Non-cooperative maneuvering spacecraft tracking via a variable structure estimator. Aerosp. Sci. Technol. 2018, 79, 352–363. [Google Scholar]
- Singer, R.A. Estimating optimal tracking filter performance for manned maneuvering targets. IEEE Trans. Aerosp. Electron. Syst. 1970, AES-6, 473–483. [Google Scholar] [CrossRef]
- Zhou, H.R.; Kumar, K.S. A ’current’ statistical model and adaptive algorithm for estimating maneuvering targets. J. Guid. Control Dyn. 1984, 7, 596–602. [Google Scholar] [CrossRef]
- Mehrotra, K.; Mahapatra, P.R. A jerk model for tracking highly maneuvering targets. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 1094–1105. [Google Scholar] [CrossRef] [Green Version]
- Mahapatra, P.R.; Mehrotra, K. Mixed coordinate tracking of generalized maneuvering targets using acceleration and jerk models. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 992–1000. [Google Scholar] [CrossRef]
- Qiao, X.D.; Wang, B.S. A motion model for tracking highly maneuvering targets. In Proceedings of the 2002 IEEE Radar Conference, Long Beach, CA, USA, 25 April 2002; pp. 493–499. [Google Scholar]
- Zhou, D.H.; Xi, Y.G.; Zhang, Z.J. Suboptimal fading extended Kalman Filtering for nonlinear systems. Control Decis. 1990, 5, 1–6. (In Chinese) [Google Scholar]
- Jiang, Y.Z.; Ma, P.; Baoyin, H. Residual-Normalized Strong Tracking Filter for Tracking a Noncooperative Maneuvering Spacecraft. J. Guid. Control Dyn. 2019, 42, 2304–2309. [Google Scholar] [CrossRef]
- Blom, H.A.; Bar-Shalom, Y. The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Trans. Automat. Contr. 1988, 33, 780–783. [Google Scholar] [CrossRef]
- Xiong, K.; Wei, C.L.; Liu, L.D. Robust multiple model adaptive estimation for spacecraft autonomous navigation. Aerosp. Sci Technol. 2015, 42, 249–258. [Google Scholar] [CrossRef]
- Lee, S.; Lee, J.; Hwang, I. Maneuvering Spacecraft Tracking via State-Dependent Adaptive Estimation. J. Guid. Control Dyn. 2016, 39, 2034–2043. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | a (km) | e | i (°) | Ω (°) | w (°) | f (°) |
|---|---|---|---|---|---|---|
| Observing satellite | 42,175.14 | 0.002 | 1.37 | 359.12 | −113.12 | 184.52 |
| Maneuvering target | 42,165.14 | 0.008 | 1.38 | 359.12 | −113.12 | 184.80 |
| Conditions | Time (s) | ||||
|---|---|---|---|---|---|
| 1 | 0.141 | 1000–2000 | −0.1 | 0 | 0.1 |
| 2 | 0.707 | 1000–2000 | −0.5 | 0 | 0.5 |
| 3 | 1.414 | 1000–2000 | −1 | 0 | 1 |
| Conditions | Time (s) | |||
|---|---|---|---|---|
| 1 | 1000–2000 | 0 | ||
| 2 | 1000–2000 | 0 | ||
| 3 | 1000–2000 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, J.; Yang, Z.; Luo, Y. Adaptive Tracking Method for Non-Cooperative Continuously Thrusting Spacecraft. Aerospace 2021, 8, 244. https://doi.org/10.3390/aerospace8090244
Yin J, Yang Z, Luo Y. Adaptive Tracking Method for Non-Cooperative Continuously Thrusting Spacecraft. Aerospace. 2021; 8(9):244. https://doi.org/10.3390/aerospace8090244
Chicago/Turabian StyleYin, Juqi, Zhen Yang, and Yazhong Luo. 2021. "Adaptive Tracking Method for Non-Cooperative Continuously Thrusting Spacecraft" Aerospace 8, no. 9: 244. https://doi.org/10.3390/aerospace8090244
APA StyleYin, J., Yang, Z., & Luo, Y. (2021). Adaptive Tracking Method for Non-Cooperative Continuously Thrusting Spacecraft. Aerospace, 8(9), 244. https://doi.org/10.3390/aerospace8090244