1. Introduction
In the recent half-century, on-orbit services (OOSs) have been widely used in space stations, space shuttles, space telescopes, and other items, which have provided human beings huge economic value and science rewards [
1]. Besides, autonomous OOSs have been gradually applied in the recent several years, such as on-orbit refueling and on-orbit inspection missions, which have preliminarily shown application prospects [
1,
2]. The number of space targets is increasing rapidly, and providing effective on-orbit services for a large number of satellites is a great challenge for space agencies of all countries.
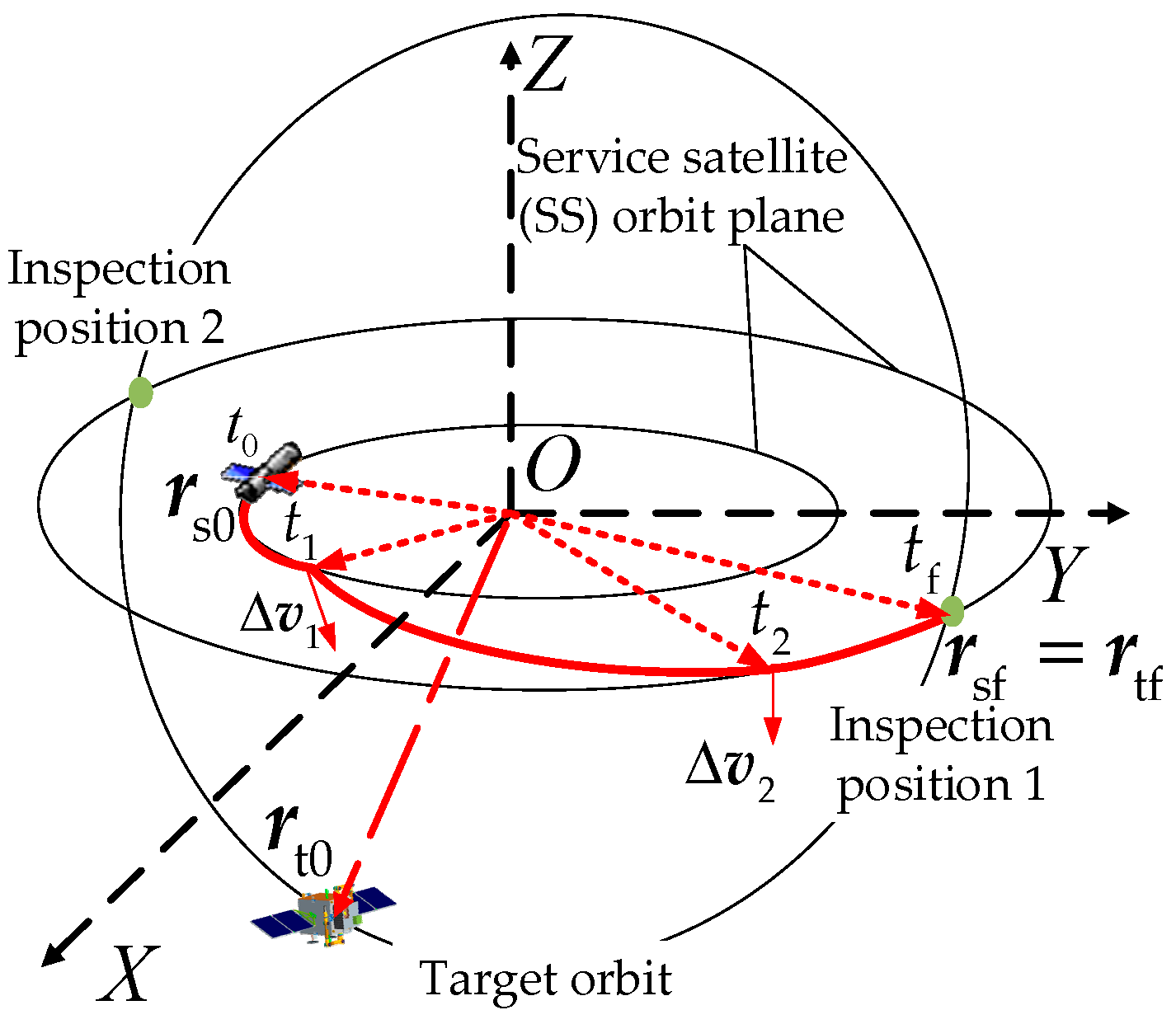
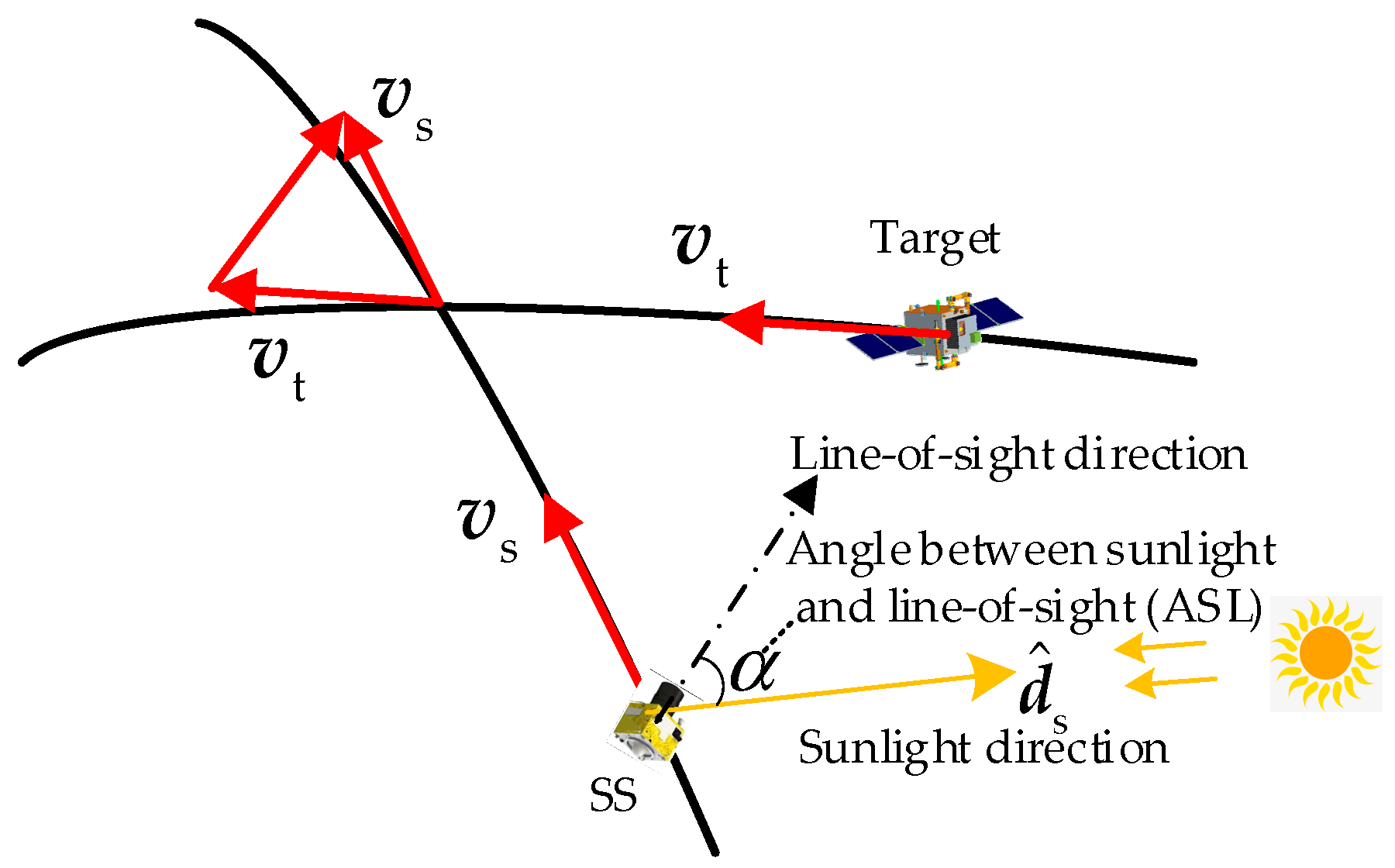
Multisatellite flyby inspection (MSFI) refers to the fact that a service satellite (SS) or multiple SSs perform the orbital transfer in a short period and fly by multiple target satellites at close range to obtain target images and radio signal characteristics and other information to provide support and help for space situational awareness and subsequent OOSs. Compared with the approach of close inspection through coplanar rendezvous, MSFI can not only obtain information of more targets through fast flyby inspection on different planes but also save propellant and time, which is more suitable for the needs of close inspection of satellite groups. To obtain clear image information, it is required that the inspection points have good illumination conditions and the line-of-sight rotation rate be within a certain range, which can be collectively referred to as the inspection constraints (ICs) at each flyby point. In the orbital transfer process, the size of a single maneuver is limited by the engine capacity, and the orbital height cannot be lower than the lowest limit of low earth orbit (LEO), which are collectively referred to as transfer process constraints (TPCs). Due to the coupling effect of the ICs and TPCs, the trajectory optimization problem of MSFI is different from the trajectory optimization problems of multisatellite rendezvous and unconstrained multisatellite flyby, which have been studied extensively. The problem becomes complex and difficult to solve after considering the comprehensive influence of discrete and continuous variables such as inspection order, time, and maneuver scheme.
If the current position and velocity of the SS and the information of the target to be flown by are known and the orbit plane intersection inspection is adopted, the SS does not need to adjust the orbit plane. At this time, the position of the flyby point is determined, and the orbit maneuver solution is essentially a two-point boundary value problem (TPBVP). The Lambert problem, as a classical TPBVP, has been a hot topic for many years. The constrained Lambert problem is an important research direction of the TPBVP. Zhang et al. characterized the minimum perigee and maximum apogee constraints as the constraints of semimajor axis iterative variables and then obtained the feasible revolution range in the multirevolution algorithm, which can reduce the number of cycles to be evaluated [
3]. Huang et al. characterized apogee and perigee height constraints as the lateral component range of eccentricity vector, and the solution of multirevolution transfer can be selected in advance to meet the constraints [
4]. Thompson et al. made the dynamic transformation of height constraints of apogee and perigee and determined the input direction of flight, transfer time, and cycle range by semimajor axis versus transfer time graph [
5]. According to the demand of Moon-to-Earth transfer, Luo et al. effectively transformed the dynamic characterization of the original Lambert problem for the quasi-Lambert problem with limited departure flight-direction angle but free transfer angle and gave a fast iterative solution [
6]. Karthikeyan et al. proposed a two-pulse maneuver strategy to meet the constraints of reentry terminal time and flight-direction angle based on the Lambert problem [
7]. Aiming at the constraint of orbital maneuvering pulse size, Shirazia et al. characterized the multipulse rendezvous problem as a multisegment two-point boundary value problem [
8].
For other constrained TPBVPs, Thompson et al. proposed a tangent guidance method with constrained initial or terminal flight direction angle according to the safety requirements of rendezvous and solved it by numerical iteration [
9]. Taur et al. constructed the optimal rendezvous/interception primer vector method with path constraints by using the variational method to deal with the constraints of perigee and apogee [
10]. Zhang et al. derived the analytical solution of tangent guidance and gave the existence condition of the solution [
11]. Zhang et al. derived the partial derivative analytical model of the influence of orbital maneuver along the track on the illumination conditions and the trajectories of the subsatellite point based on the J2 relative dynamics equation and revealed the law of the influence on the fast and slow diffusion directions [
12,
13]. Liu et al. studied the optimal pulse guidance law considering the impact angle constraint of the intercept terminal [
14]. Xie et al. considered the constraints of pulse time, pulse component size, and terminal position and derived the first-order necessary condition of minimum velocity increment by using the variational method [
15].
The above studies mainly consider the requirements of perigee and apogee height and terminal velocity direction, and some studies consider the constraint of single maneuver pulse size. The optimization of a single flyby inspection trajectory is the underlying support of MSFI. The single flyby time needs to be as short as possible, and the excellent results often appear in the boundary of constraint satisfaction and conflict. The way of constraint processing directly affects the effect and efficiency of multisatellite problem-solving.
The problem of multisatellite flyby belongs to the problem of multisatellite access, and a similar problem is the problem of multisatellite rendezvous. For multisatellite rendezvous, there are three different modes: one to many (O2M), many to many (M2M), and peer to peer (P2P). They are rendezvous modes of one SS or multiple SSs and multiple target satellites and rendezvous mode of each satellite. The first is O2M mode. Hudson et al. and Zhang et al. studied the OOS problem [
16,
17]. Taking the optimal speed increment or the maximum task revenue as the task index, the optimal sequence was obtained by using the optimization algorithm. Zhang et al. also considered constraints such as illumination. Barea et al. and Zhao et al. studied the problem of large-scale space debris removal, aiming at maximizing mission revenue, and obtained rendezvous sequences and actual trajectories that meet both time and energy constraints [
18,
19]. The second is M2M mode. Li et al. studied the on-orbit refueling problem with the background of the fuel station and refueling spacecraft [
20], optimized the task allocation and refueling sequence, and obtained the on-orbit refueling scheme meeting the constraints of time and carrying capacity. Zhang et al. and Zhu et al. considered the location of the refueling station and the cost of an open refueling station; ant colony algorithm or clustering algorithm was used to determine the location and number of fuel stations to meet the on-orbit refueling task constraints [
21,
22]. Guo et al. considered multiple-satellite deployment problems and used genetic algorithms and sequential quadratic programming to optimize the transfer orbits [
23]. The third is the P2P mode. Yu et al. proposed a two-stage planning strategy to apply to the P2P mode, considering the complex constraints of communication time window and illumination [
24]. Du et al. took the distributed on-orbit refueling as the research object, transformed the problem into a graph matching problem, and used graph theory algorithm and genetic algorithm to solve it [
25].
For the problem of the multisatellite flyby, coplanar maneuver and out-of-plane flyby are usually used to visit the target spacecraft. Zhang et al. gave the necessary and sufficient conditions for a single spacecraft to fly by three Walker constellation satellites in different planes without orbital maneuver [
26]. Zhou et al. studied the close-range observation mission of multisatellite flyby based on coplanar maneuver; proposed the method of perigee maneuver to fly by different targets; and optimized the flying sequence [
27], task time, and maneuver strategy with a two-level optimization model. Based on the work of Zhou et al., Zhu et al. put forward the strategy of two-tangent-impulse maneuver [
28], which made the maneuver position not only limited to the perigee, and completed the mission of out-of-plane flyby. Zhao Z. studied the MSFI mission based on coplanar maneuver strategy and hybrid-encoding genetic algorithm (HEGA) but did not consider the complex constraints such as illumination [
29]. Ma N. proposed the strategy of backward phase maneuver, where a single mission satellite flew by target satellites on different orbit planes and completed the task of traversal access to the Walker constellation [
30]. Peng et al. used greedy search and multiround planning method to obtain the mission scheme of MSFI and compared it with the traditional optimization method [
31].
For a single flyby inspection mission, some researchers do not consider the ICs. Even if the ICs are considered, the inspection window is often predicted and screened based on the Hohmann-like maneuver in engineering, which discards a large number of inspection opportunities that are considered as infeasible due to ineffective constraint processing, thus affecting the effect of MSFI trajectory optimization [
31]. In the mission of multisatellite flyby or rendezvous, the combination of evolutionary algorithm and penalty function is used to solve the problem, which leads to low efficiency and has difficulty in finding a feasible solution when the existing constraints are difficult to meet [
17,
29]. Only considering the O2M MSFI problem with coplanar maneuvers, to obtain the feasible solution satisfying the constraints in a short time and obtain a better optimization effect, this paper proposes an MSFI trajectory optimization method based on constraint repairing and compares it with the nonrepair optimization method. Comparing with the existing work [
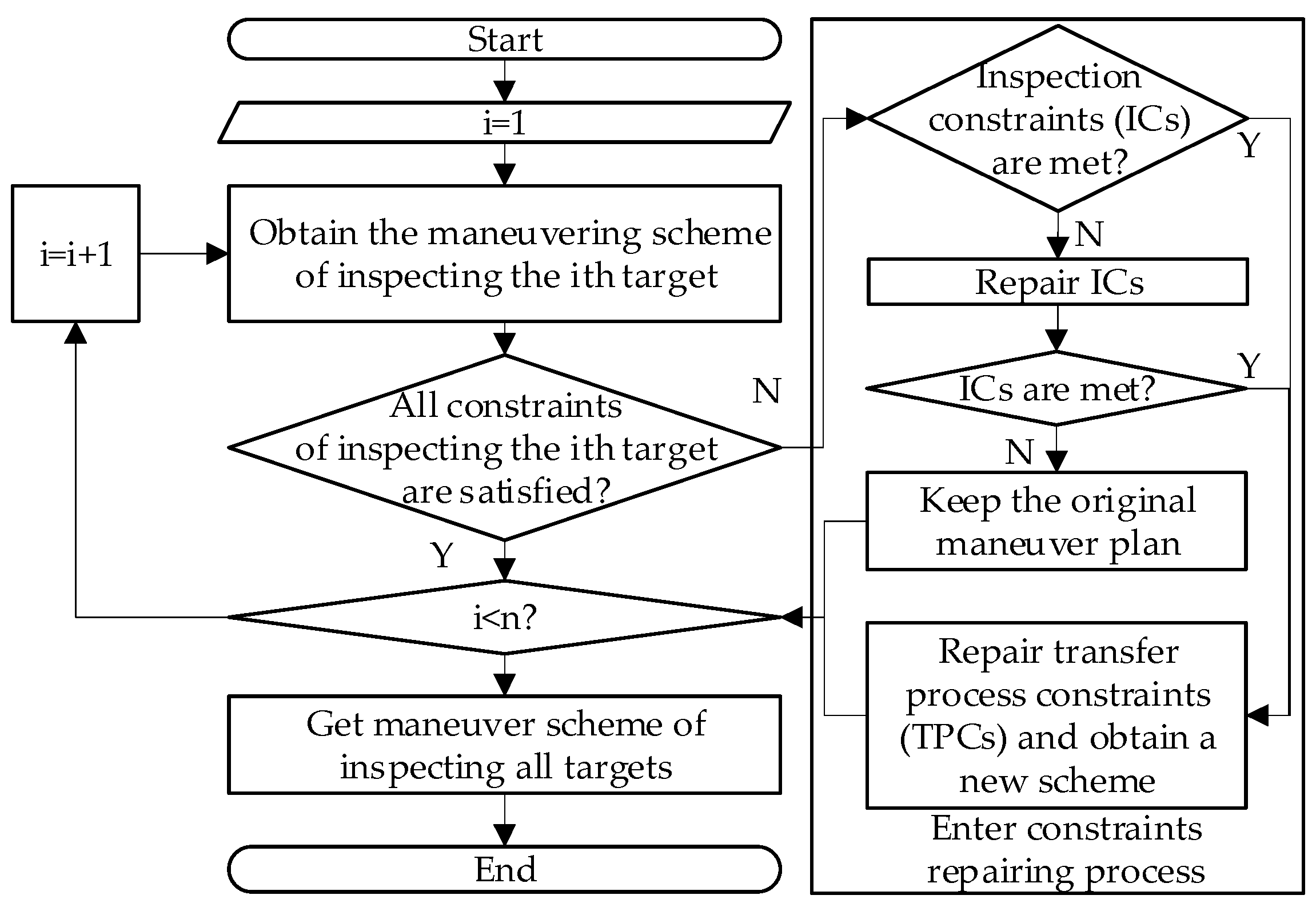
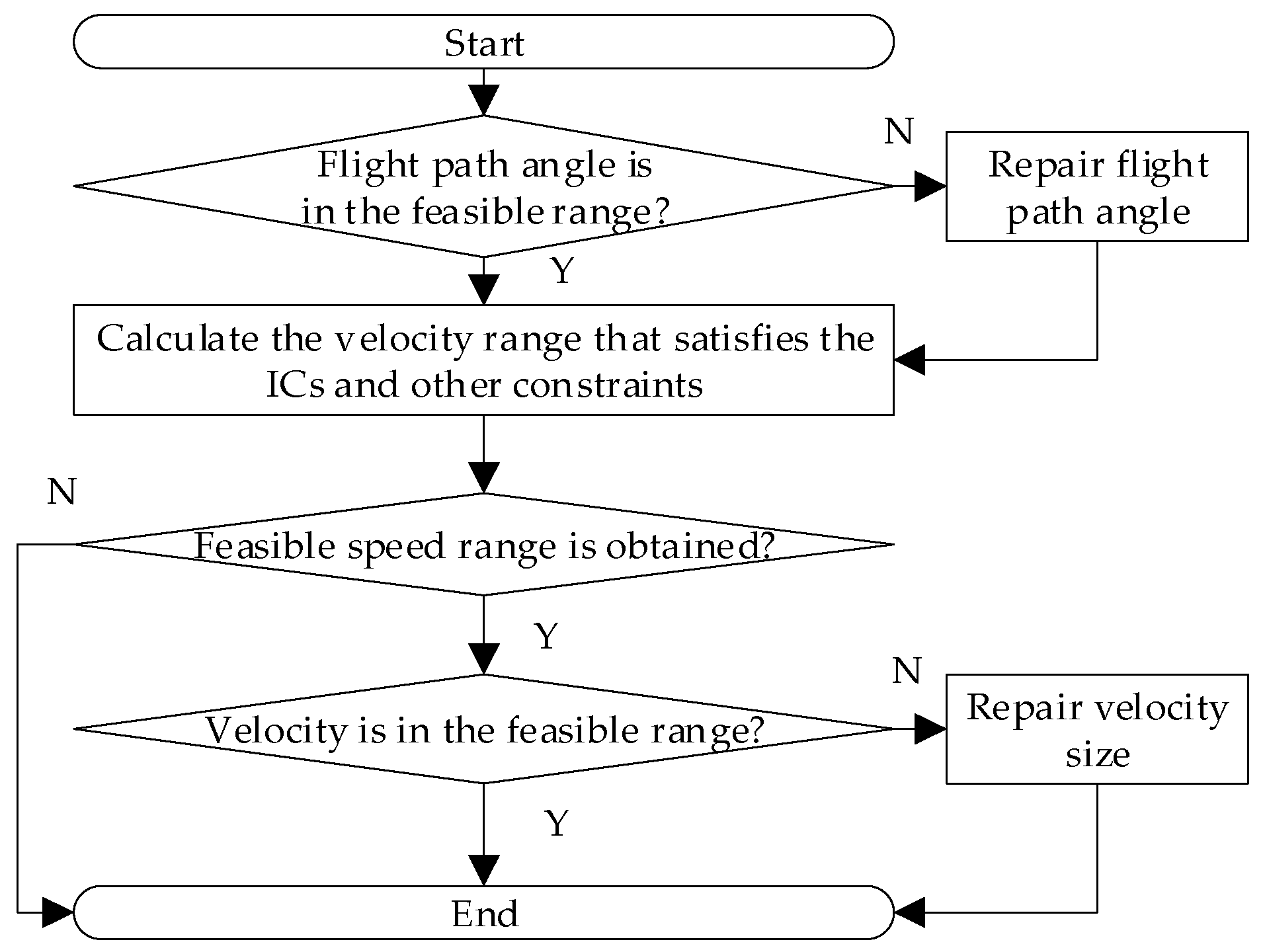
31], the main contributions of this article are as follows: Firstly, in the current research of constrained TPBVPs, this paper derives the repair range satisfying the single flyby inspection constraints through theoretical derivation, which improves the constraint process efficiency and provides support for the subsequent constraint repairing. Secondly, in the current research of multisatellite flyby or rendezvous problems with multiple constraints, such as the MSFI problems, we propose a constraint repairing method to increase feasible solution numbers and to improve optimization effects and efficiency compared with the method without repairing, especially when the constraints are hard to meet. The specific sections of this paper are arranged as follows:
Section 2 is the task flow, problem model, and solution algorithm.
Section 3 gives two examples to verify the proposed method and compares the proposed algorithm with the nonrepair optimization method.
Section 4 gives the conclusion and prospects of the future research direction.
4. Conclusions
In this paper, we propose a trajectory optimization method of MSFI based on constraint repairing. Firstly, we give the mission flow based on coplanar maneuver, and then we define the trajectory optimization model from the design variables, constraints, and objective function. Finally, we propose the trajectory optimization method based on constraint repairing from three aspects: the algorithm framework, the IC repair method, and the TPC repair method. Compared with the nonrepair method, through the calculation of the two different examples, the conclusion is as follows: When the constraints are easy to meet, the constraint repairing optimization method can obtain a reasonable solution in a short time. When the constraints are hard to meet, the optimization method based on constraint repairing is not only slightly better than the nonrepair method in optimization effect but also more than twice better than the nonrepair method in optimization efficiency, which is more suitable for solving this kind of problem.
In future research, it is necessary to consider the problem of multiple SSs inspecting multiple targets, that is, the M2M MSFI problem, which also needs an efficient algorithm combined with task allocation variables.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}