
Generalized Quantitative Stability Analysis of Time-Dependent Comprehensive Rotorcraft Systems



Abstract
:1. Introduction
- alternating loads that excite the fuselage, and
- alternating system properties leading to a time-dependent system.
2. Method
2.1. Lyapunov Characteristic Exponents
- First, the time response of the system converges to zero, which happens when all eigenvalues have a negative real part.
- Second, the system responds in a divergent manner when some eigenvalues have a positive real part.
- Third, a periodic orbit can be the resulting motion in the presence of purely imaginary eigenvalues.
2.2. Application to LTP Problems
2.3. Numerical Estimation of LCEs
2.4. Computation of State Transition Matrix
2.5. Analytical Sensitivity of LCEs
2.5.1. Sensitivity of QR Decomposition
2.5.2. Sensitivity of the State Transition Matrix
3. Numerical Results
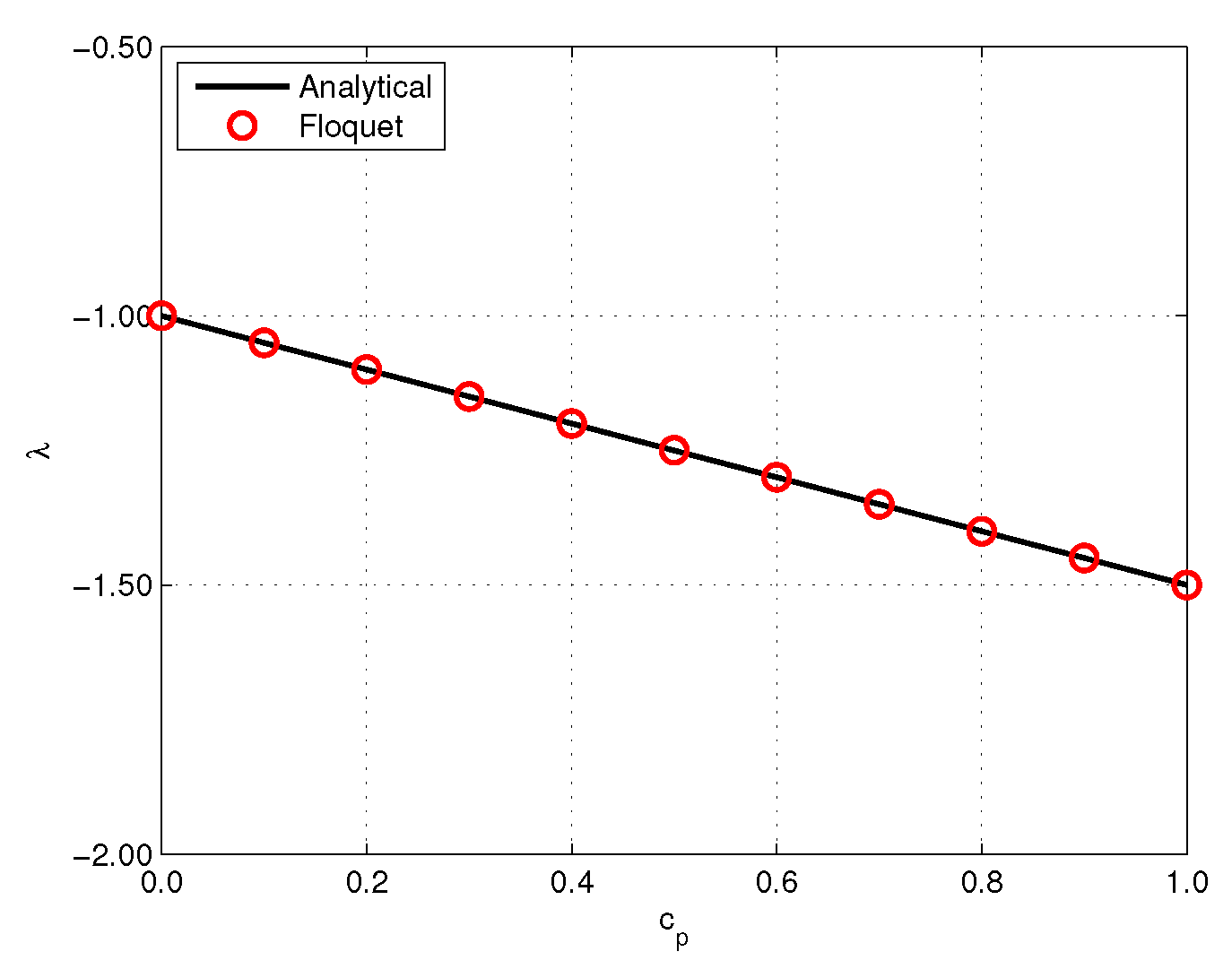
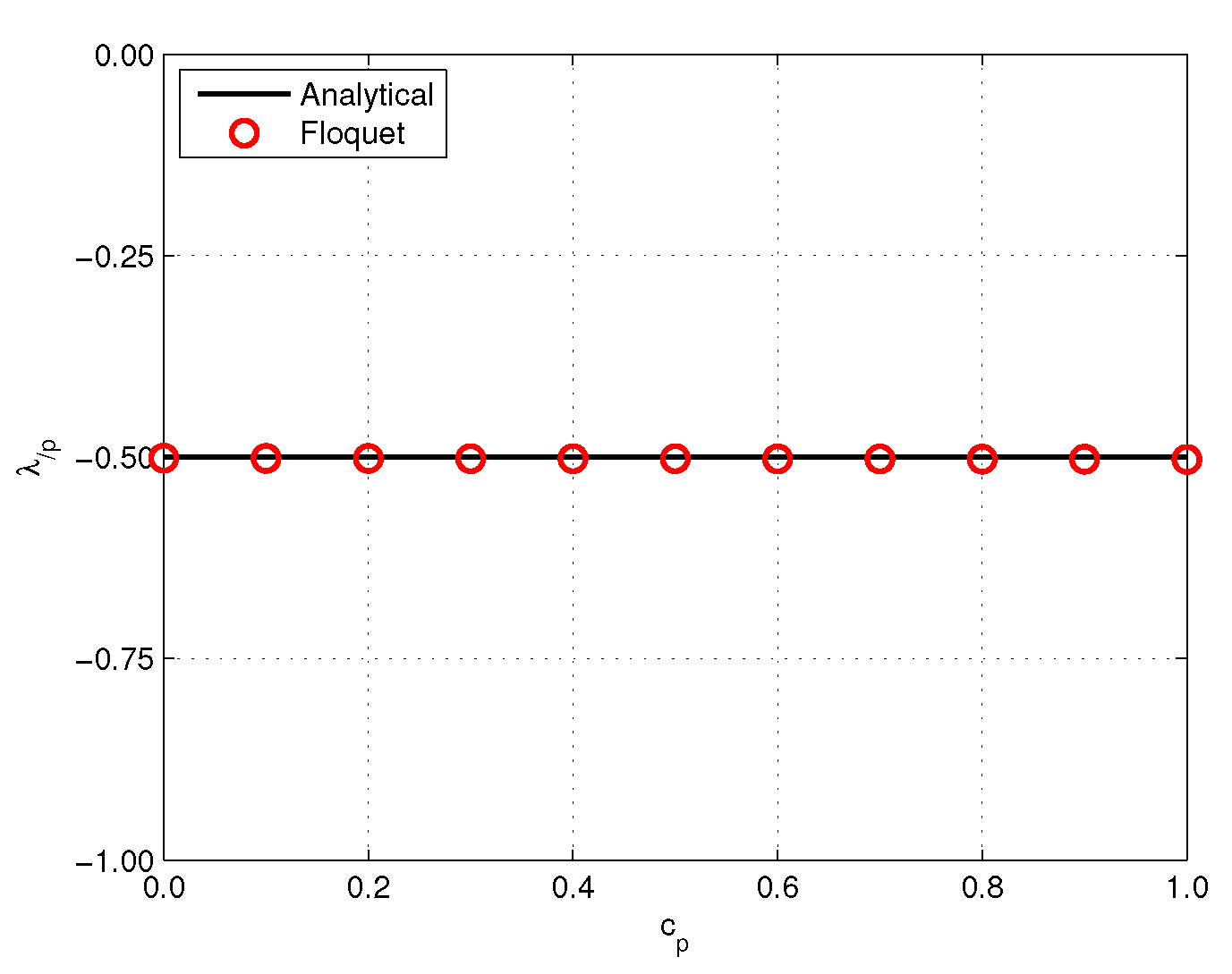
3.1. Verification with an Analytical Solution
3.2. Complex LTP Rotorcraft Model
3.2.1. Model Description
- all six rigid body modes (Fore/Aft, Lateral, Plunge, Roll, Pitch, and Yaw);
- flight mechanics derivatives of the fuselage determined by fuselage/wing-body, horizontal tail, and the vertical tail;
- ten elastic airframe modes captured at airframe and connection locations (such as airframe rotor connection); additionally, % modal damping was also added;
- three bending modes of the rotor in multiblade coordinates, formulated using a linerazized finite volume approach [26];
- three main rotor servo-actuators modelled as transfer function from the force applied by controls () and requested displacement () to the servoactuator displacement (), namely ;
- lead-lag dampers for the main rotor blades.
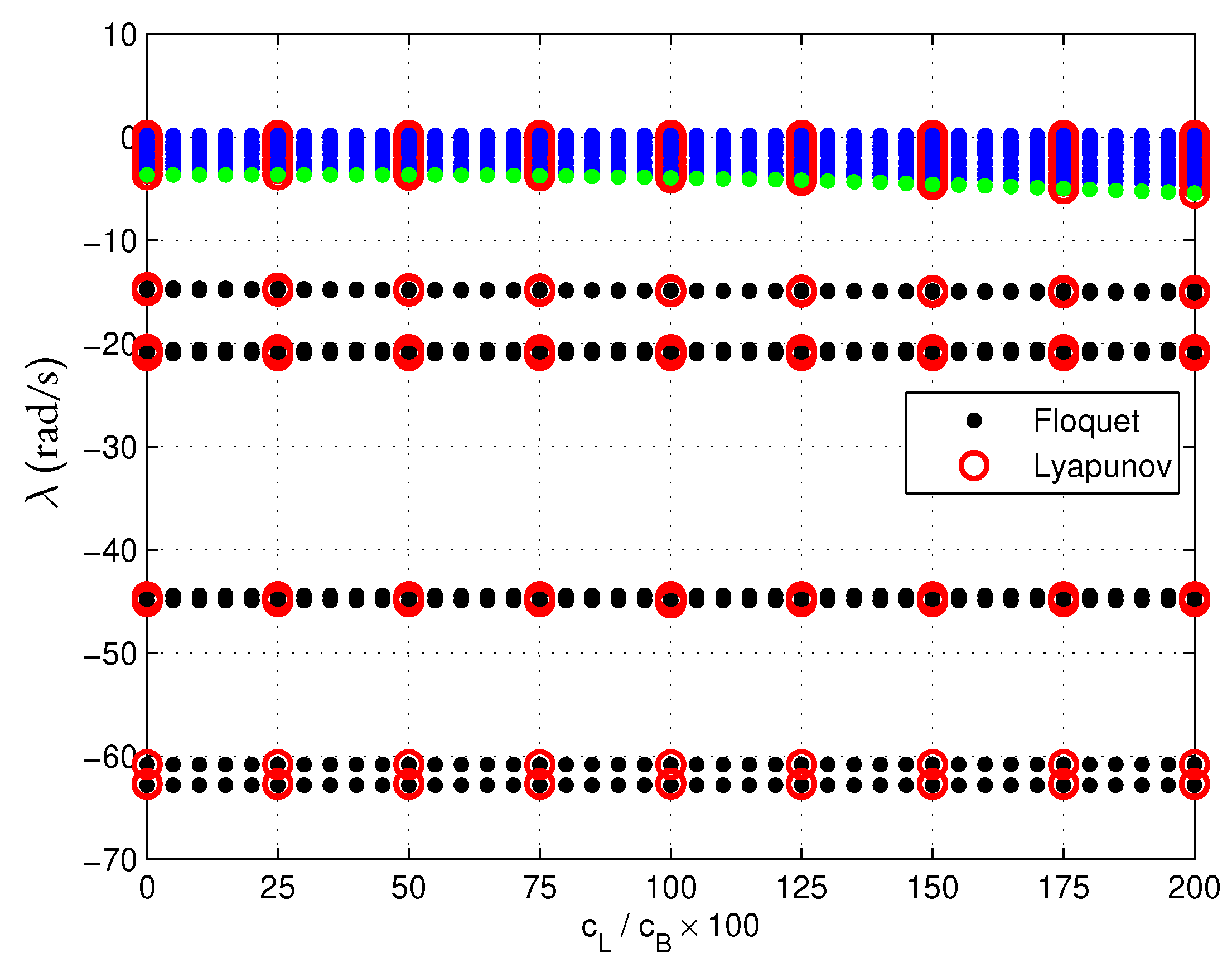
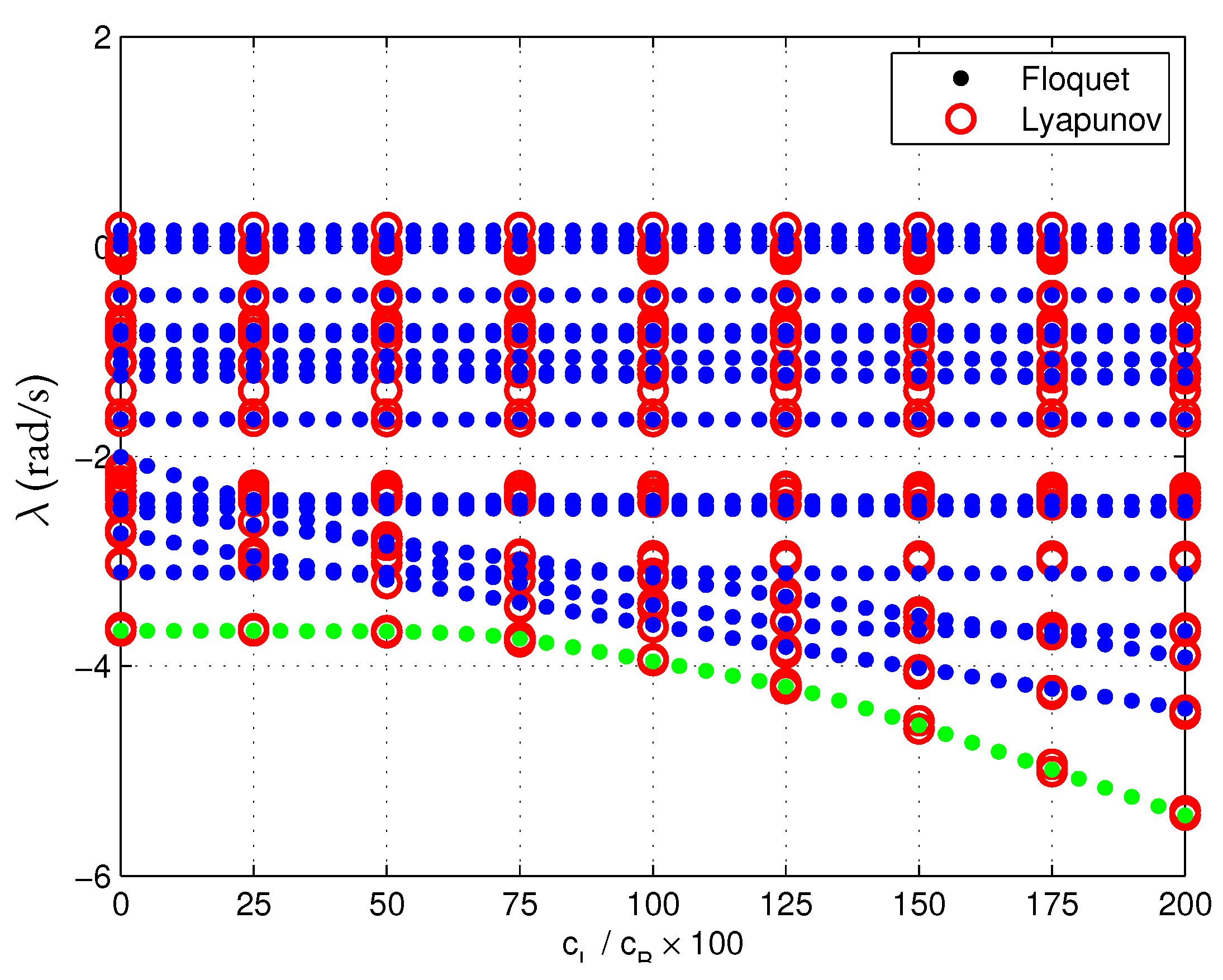
3.2.2. Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| LCE | Lyapunov Characteristic Exponents |
| LTI | Linear, Time-Invariant |
| LTP | Linear, Time-Periodic |
| LTV | Linear, Time-Variant |
| STM | State Transition Matrix |
References
- McGowen, S.S. Helicopters, an Illustrated History of Their Impact; ABC Clio: Santa Barbara, CA, USA, 2005. [Google Scholar]
- Johnson, W. Rotorcraft Aeromechanics; Cambridge University Press: New York, NY, USA, 2013. [Google Scholar]
- Filippone, A. Flight Performance of Fixed and Rotary Wing Aircraft; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Anonymous. Rotorcraft Flying Handbook; FAA H-8083-21; Federal Aviation Administration: Washington, DC, USA, 2000. [Google Scholar]
- Ferrer, R.; Krysinski, T.; Auborg, P.; Belizzi, S. New Methods for Rotor Tracking and Balance Tuning and Defect Detection Applied to Eurocopter Products. In Proceedings of the American Helicopter Society 57th Annual Forum, Washington, DC, USA, 9–11 May 2001. [Google Scholar]
- Hammond, C.E. An Application of Floquet Theory to Prediction of Mechanical Instability. J. Am. Helicopter Soc. 1974, 19, 14–23. [Google Scholar] [CrossRef] [Green Version]
- Hirsch, M.W.; Smale, S.; Devaney, R.L. Differential Equations, Dynamical Systems, and an Introduction to Chaos; Elsevier: San Diego, CA, USA, 2004. [Google Scholar]
- Hull, D.G. Fundamentals of Airplane Flight Mechanics; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Bittanti, S.; Colaneri, P. Periodic Systems: Filtering and Control; Springer: London, UK, 2009. [Google Scholar]
- Bielawa, R.L. Rotary Wing Structural Dynamics and Aeroelasticity, 2nd ed.; AIAA: Washington, DC, USA, 2005. [Google Scholar]
- Benettin, G.; Galgani, L.; Giorgilli, A.; Strelcyn, J.M. Lyapunov characteristic exponents for smooth dynamical systems and for Hamiltonian systems; a method for computing all of them. Part 1: Theory. Meccanica 1980, 15, 9–20. [Google Scholar] [CrossRef]
- Tamer, A.; Masarati, P. Stability of Nonlinear, Time-Dependent Rotorcraft Systems Using Lyapunov Characteristic Exponents. J. Am. Helicopter Soc. 2016, 61, 14–23. [Google Scholar] [CrossRef]
- Masarati, P.; Tamer, A. Sensitivity of trajectory stability estimated by Lyapunov characteristic exponents. Aerosp. Sci. Technol. 2015, 47, 501–510. [Google Scholar] [CrossRef] [Green Version]
- Adrianova, L.Y. Introduction to Linear Systems of Differential Equations. In Translations of Mathematical Monographs; American Mathematical Society: Providence, RI, USA, 1995; Volume 146. [Google Scholar]
- Medio, A.; Lines, M. Nonlinear Dynamics—A Primer; Cambridge University Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Strogatz, S.H. Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering; Perseus Books: Reading, MA, USA, 1994. [Google Scholar]
- Hsu, C.S. On approximating a general linear periodic system. J. Math. Anal. Appl. 1974, 45, 234–251. [Google Scholar] [CrossRef] [Green Version]
- Friedmann, P.; Silverthorn, J. Aeroelastic Stability of Periodic Systems with Application to Rotor Blade Flutter. AIAA J. 1974, 12, 1559–1565. [Google Scholar] [CrossRef]
- Rao, S.S. Engineering Optimization; John Wiley & Sons: New York, NY, USA, 1996. [Google Scholar]
- Tamer, A.; Masarati, P. Sensitivity of Lyapunov Exponents in Design Optimization of Nonlinear Dampers. J. Comput. Nonlinear Dyn. 2019, 14, 021002. [Google Scholar] [CrossRef]
- Krauskopf, B.; Osinga, H.M.; Galán-Vioque, J. Numerical continuation methods for dynamical systems; Springer: Dordrecht, The Netherlands, 2007. [Google Scholar]
- Dieci, L.; Van Vleck, E.S. Lyapunov Spectral Intervals: Theory and Computation. SIAM J. Numer. Anal. 2002, 40, 516–542. [Google Scholar] [CrossRef]
- Rosenstein, M.T.; Collins, J.J.; De Luca, C.J. A practical method for calculating largest Lyapunov exponents from small data sets. Phys. D Nonlinear Phenom. 1993, 65, 117–134. [Google Scholar] [CrossRef]
- Fu, S.; Wang, Q. Estimating the largest Lyapunov exponent in a multibody system with dry friction by using chaos synchronization. Acta Mech. Sin. 2006, 22, 277–283. [Google Scholar] [CrossRef]
- Bousman, W.G.; Young, C.; Toulmay, F.; Gilbert, N.E.; Strawn, R.C.; Miller, J.V.; Maier, T.H.; Costes, M.; Beaumier, P. A Comparison of Lifting-Line and CFD Methods with Flight Test Data from a Research Puma Helicopter; TM 110421; NASA: Moffett Field, CA, USA, 1996. [Google Scholar]
- Tamer, A.; Masarati, P. Linearized structural dynamics model for the sensitivity analysis of helicopter rotor blades. In Proceedings of the Ankara International Aerospace Conference, Ankara, Turkey, 11–13 September 2013. [Google Scholar]
- Masarati, P.; Muscarello, V.; Quaranta, G. Linearized Aeroservoelastic Analysis of Rotary-Wing Aircraft. In Proceedings of the 36th European Rotorcraft Forum, Paris, France, 7–9 September 2010. [Google Scholar]
- Tamer, A.; Zanoni, A.; Cocco, A.; Masarati, P. A numerical study of vibration-induced instrument reading capability degradation in helicopter pilots. CEAS Aeronaut. J. 2014, 12, 427–440. [Google Scholar] [CrossRef]
- Tamer, A.; Muscarello, V.; Quaranta, G.; Masarati, P. Cabin Layout Optimization for Vibration Hazard Reduction in Helicopter Emergency Medical Service. Aerospace 2020, 7, 59. [Google Scholar] [CrossRef]
- Tamer, A.; Masarati, P. Periodic Stability and Sensitivity Analysis of Rotating Machinery. In Proceedings of the 9th IFToMM International Conference on Rotor Dynamics; Pennacchi, P., Ed.; Mechanisms and Machine Science; Springer: Cham, Switzerland, 2015; Volume 21. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| Helicopter | ||
| Gross Weight | 7400 | kg |
| Max Speed | 140 | kn |
| Main Rotor | ||
| Number of blades | 4 | |
| Radius | 7.49 | m |
| Solidity | 0.0913 | (n.d.) |
| Lock number | 8.70 | (n.d.) |
| Speed | 270 | rpm |
| Flap frequency | 1.03 | /rev |
| Lag Frequency | 0.26 | /rev |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tamer, A.; Masarati, P. Generalized Quantitative Stability Analysis of Time-Dependent Comprehensive Rotorcraft Systems. Aerospace 2022, 9, 10. https://doi.org/10.3390/aerospace9010010
Tamer A, Masarati P. Generalized Quantitative Stability Analysis of Time-Dependent Comprehensive Rotorcraft Systems. Aerospace. 2022; 9(1):10. https://doi.org/10.3390/aerospace9010010
Chicago/Turabian StyleTamer, Aykut, and Pierangelo Masarati. 2022. "Generalized Quantitative Stability Analysis of Time-Dependent Comprehensive Rotorcraft Systems" Aerospace 9, no. 1: 10. https://doi.org/10.3390/aerospace9010010
APA StyleTamer, A., & Masarati, P. (2022). Generalized Quantitative Stability Analysis of Time-Dependent Comprehensive Rotorcraft Systems. Aerospace, 9(1), 10. https://doi.org/10.3390/aerospace9010010