
A Novel Performance Adaptation and Diagnostic Method for Aero-Engines Based on the Aerothermodynamic Inverse Model

Abstract
:1. Introduction
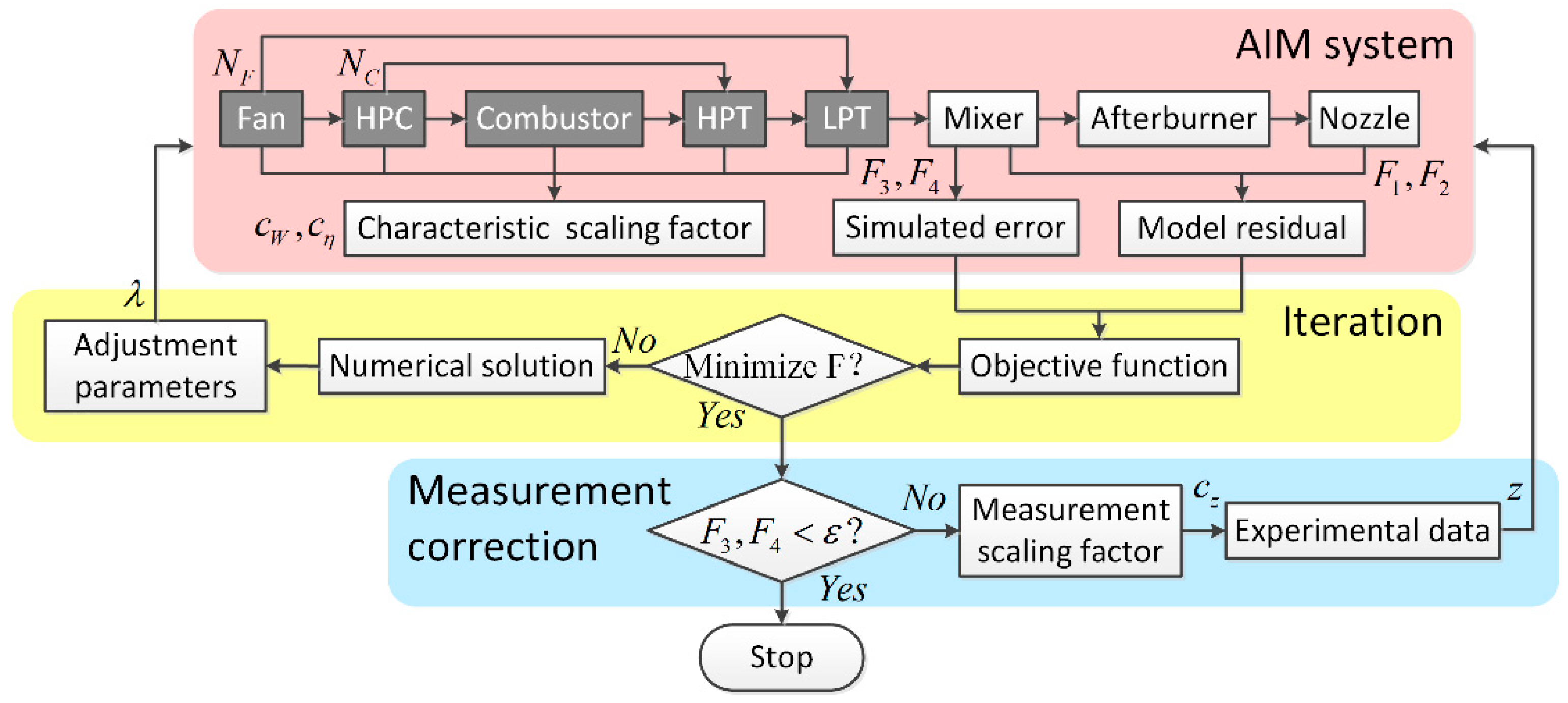
2. Model Adaptation
2.1. Measurement Correction
2.2. AIM Establishment
2.2.1. Compressor Component AIM
2.2.2. Combustor AIM
2.2.3. Turbine Component AIM
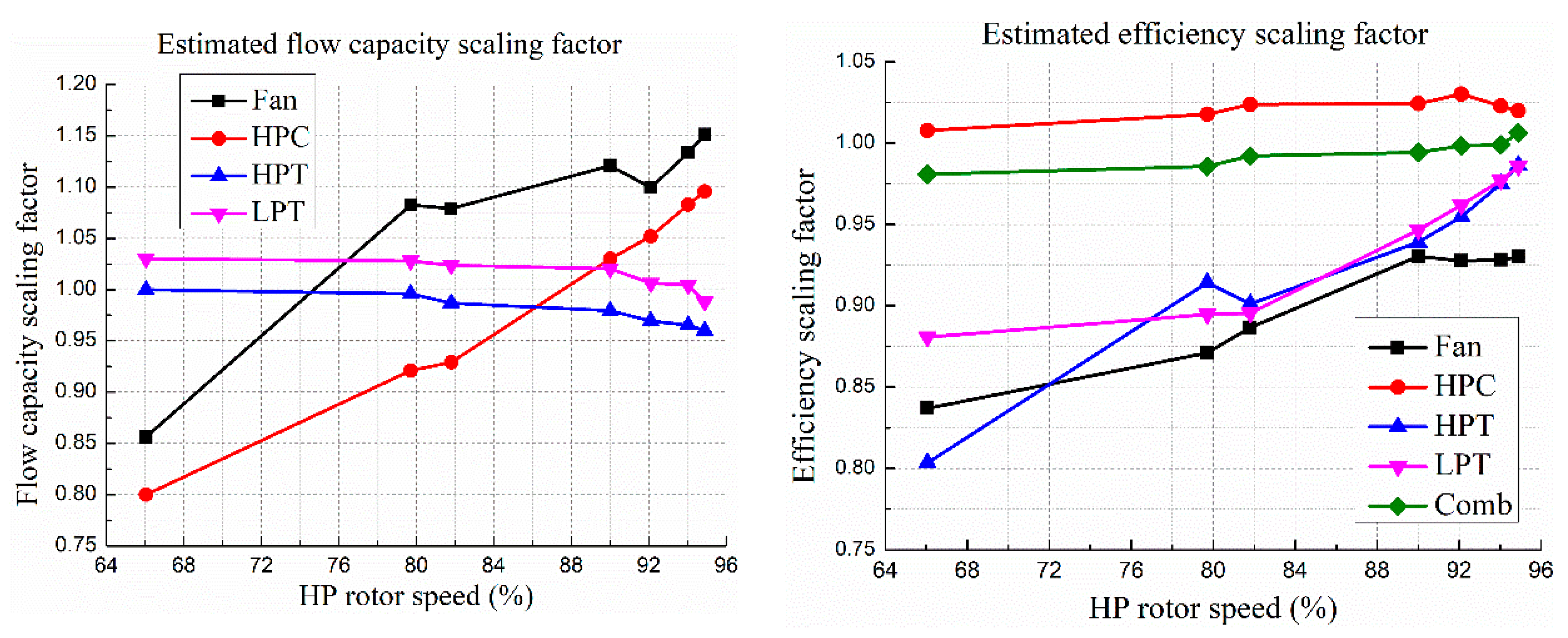
2.3. Scaling Factor Calculation
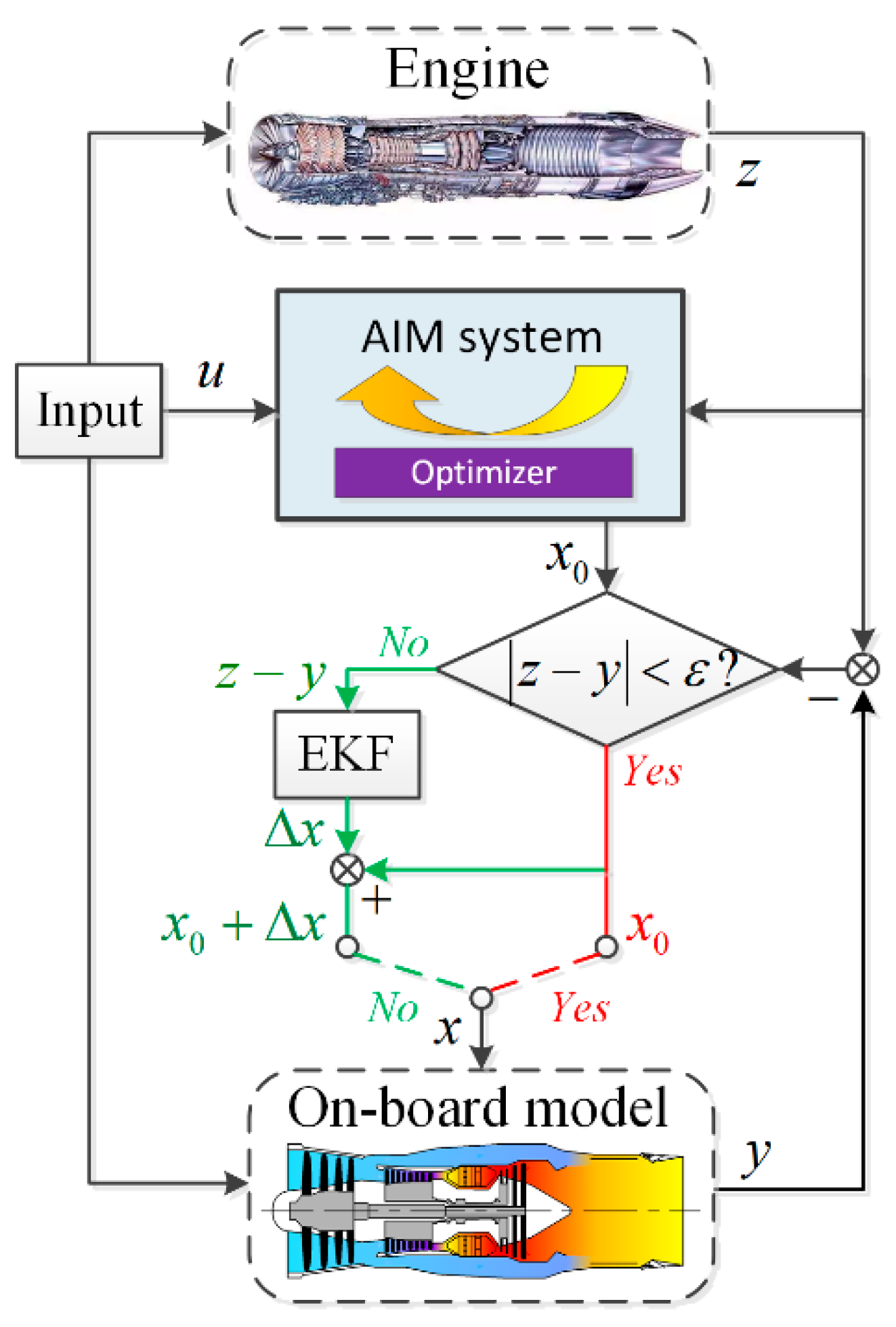
3. Performance Diagnosis
3.1. Estimated Dimensionality Reduction
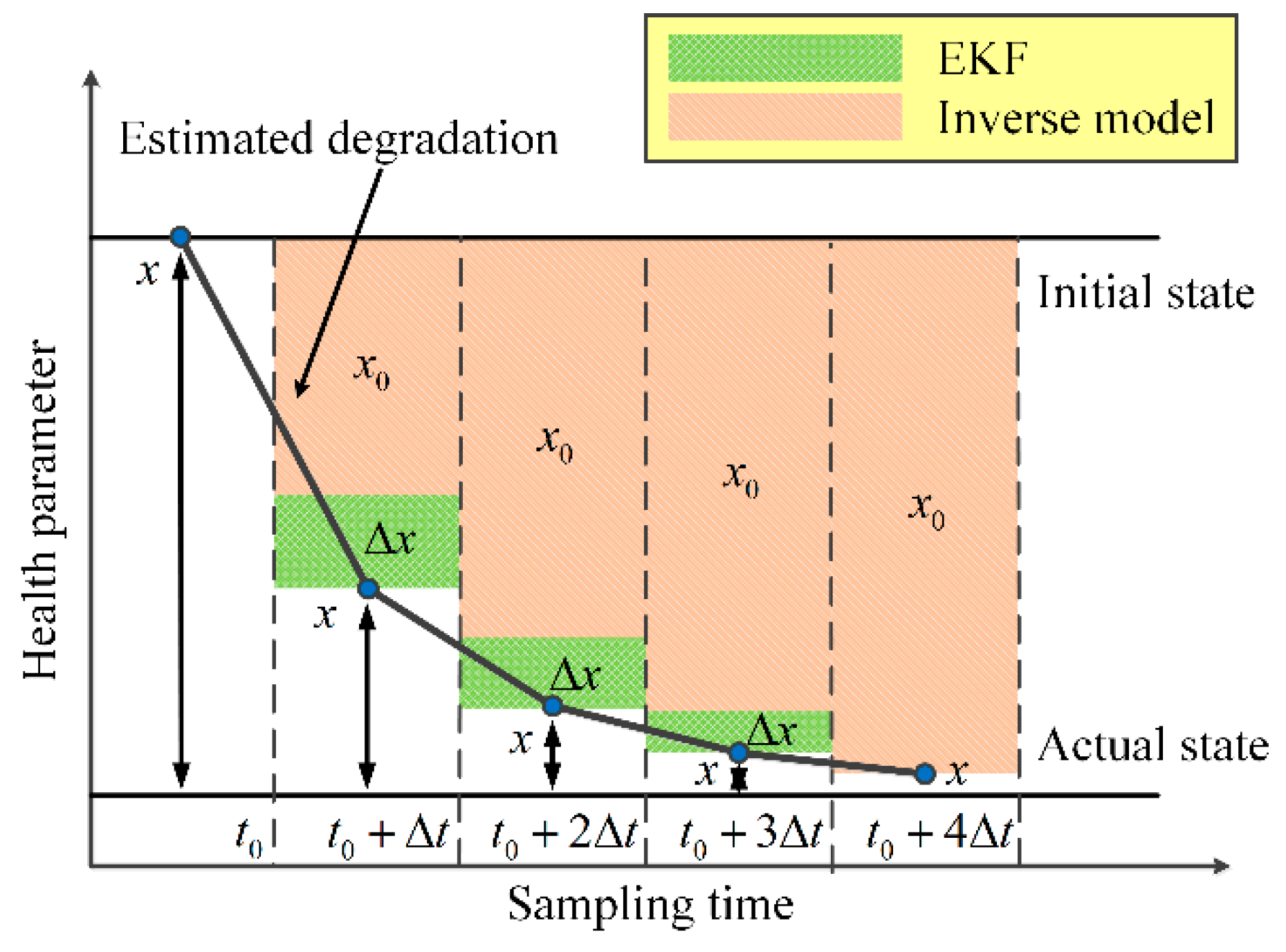
3.2. Health Parameters Estimation
3.3. Estimation Compensation
4. Simulation and Analysis
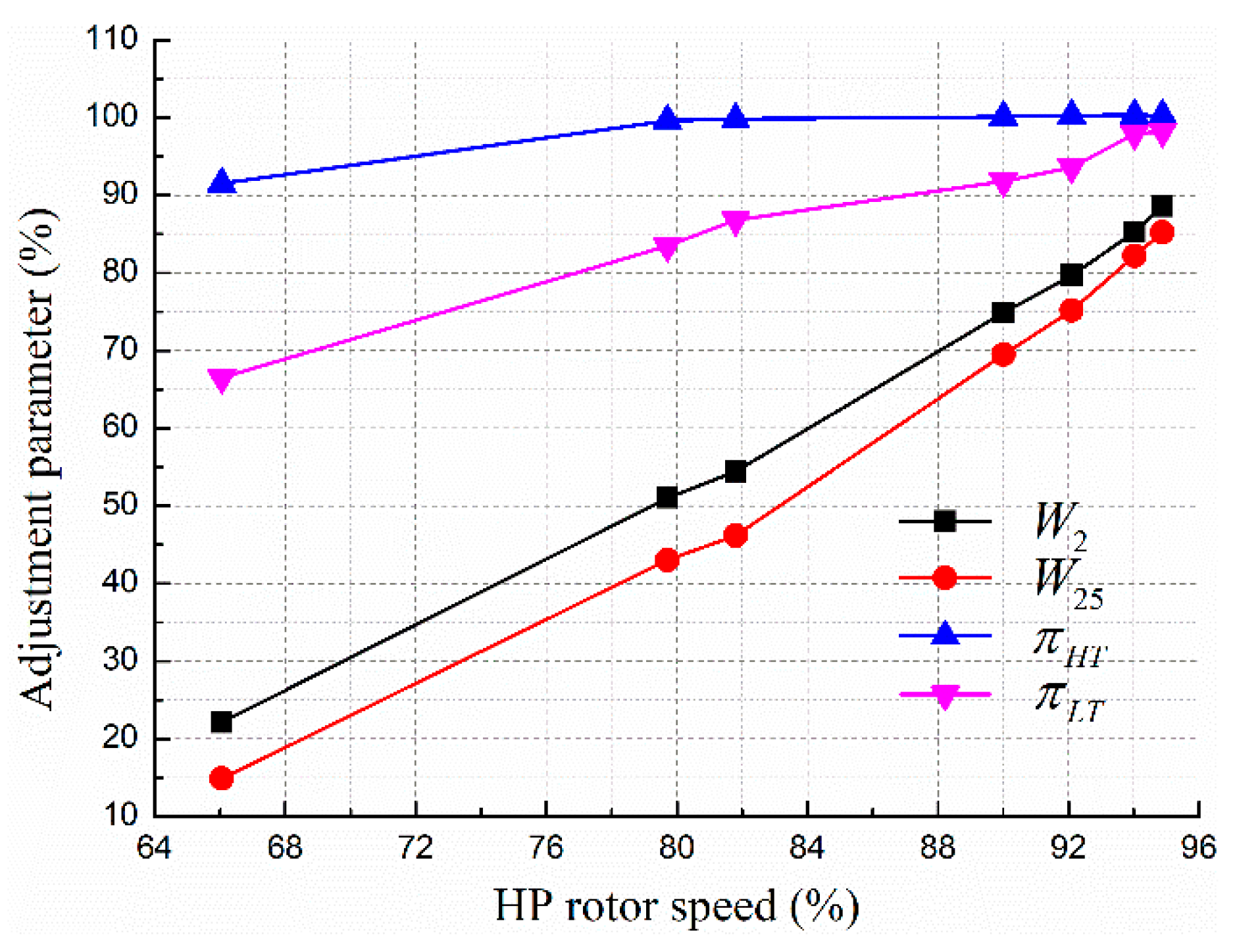
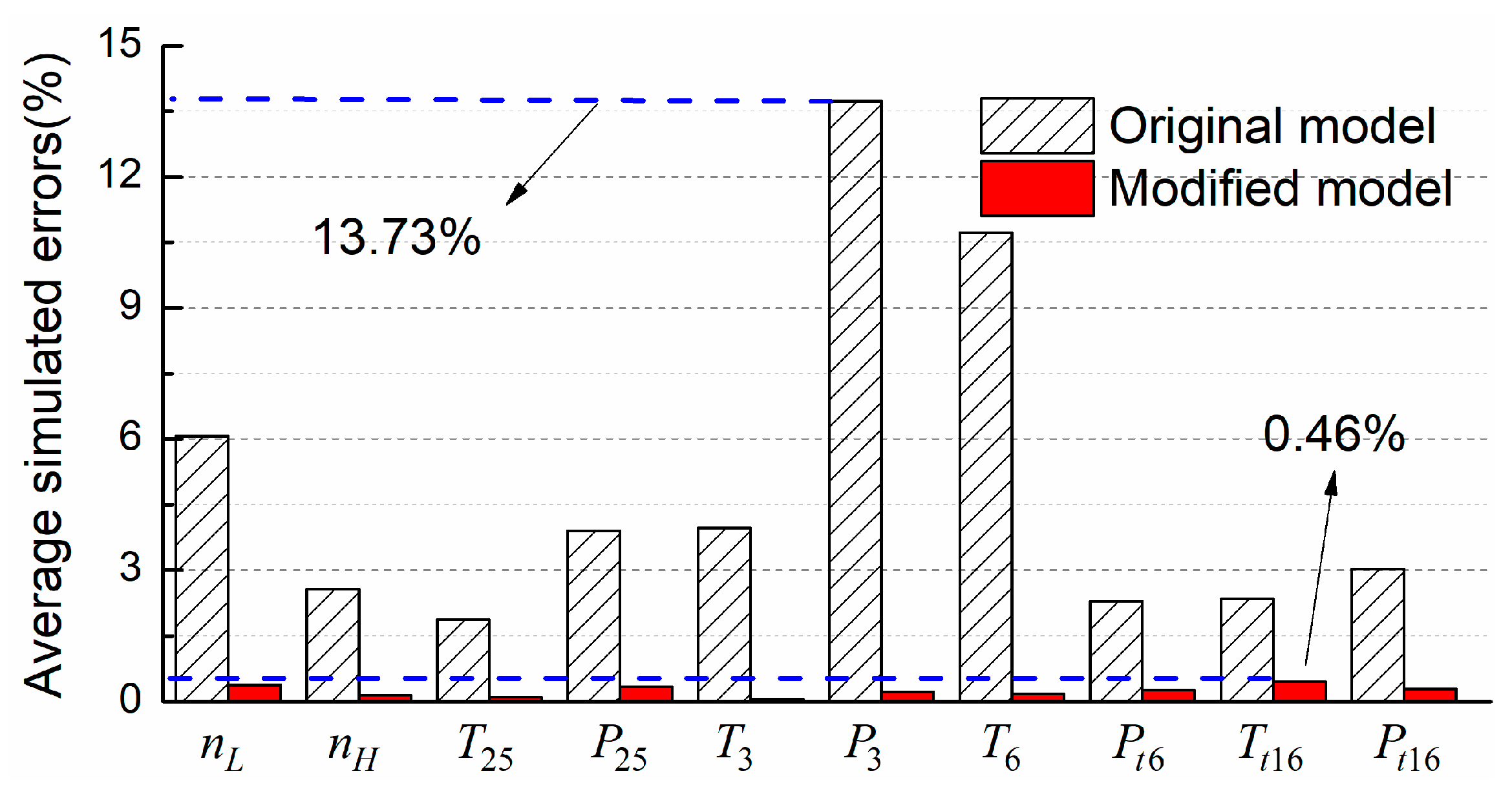
4.1. Model Adaptation Simulation
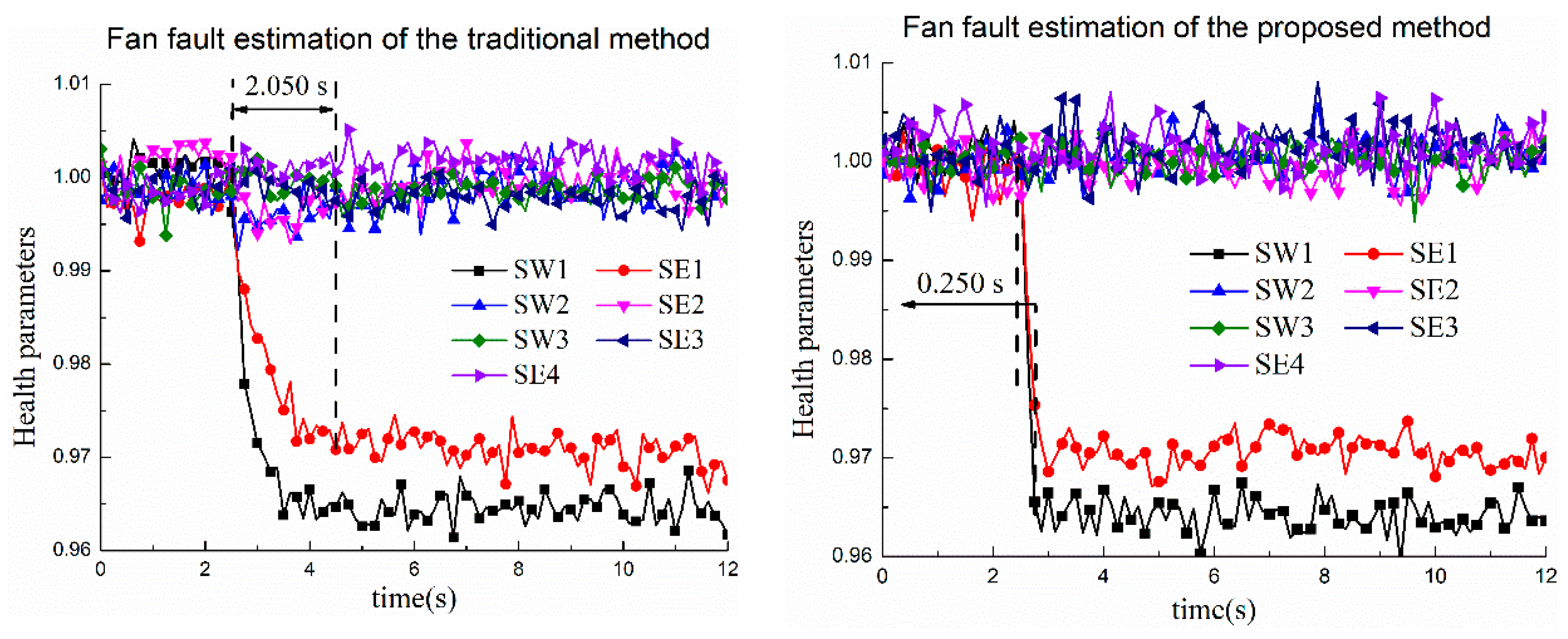
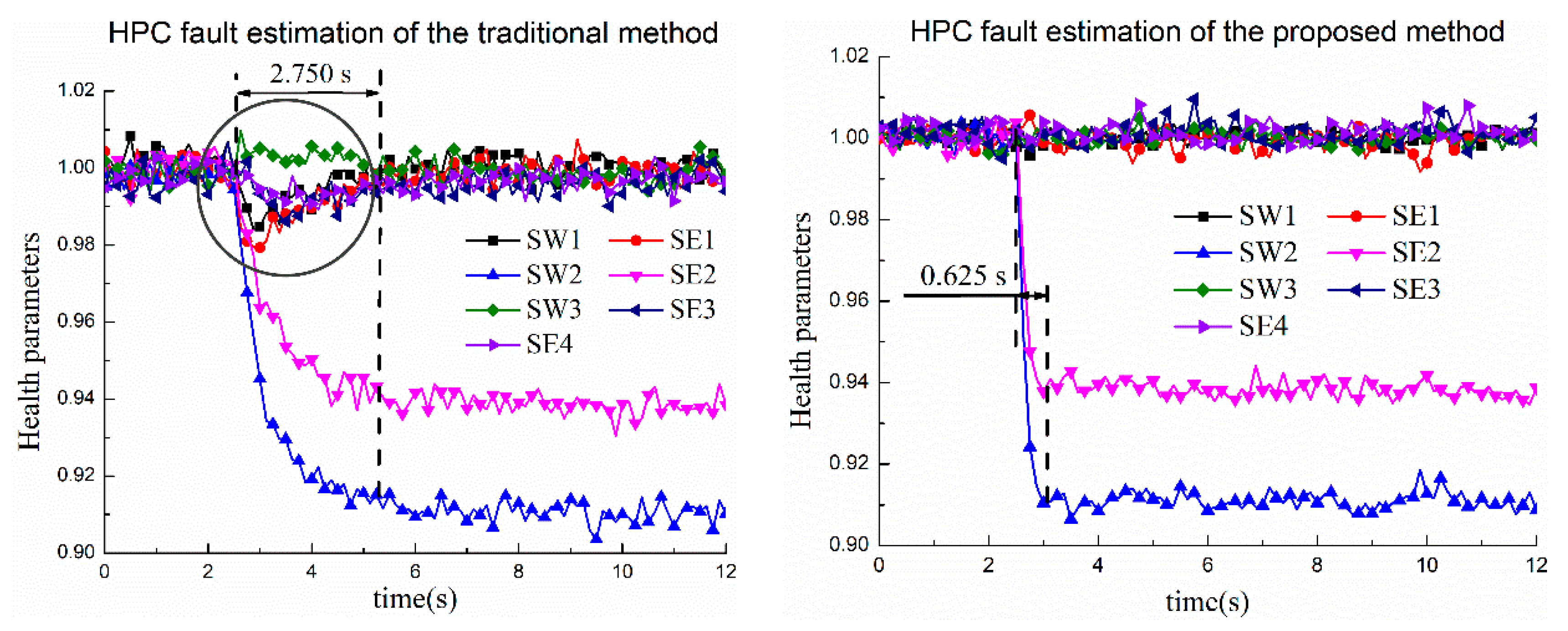
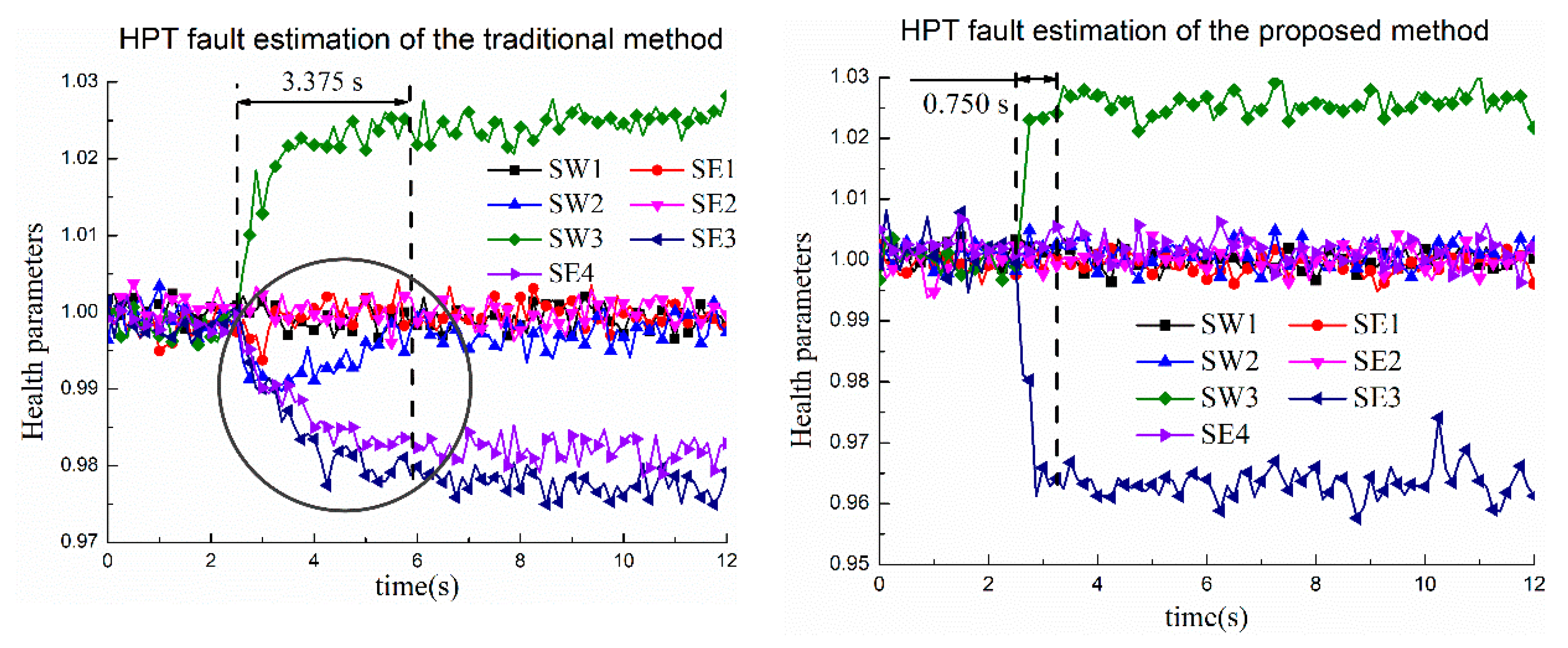
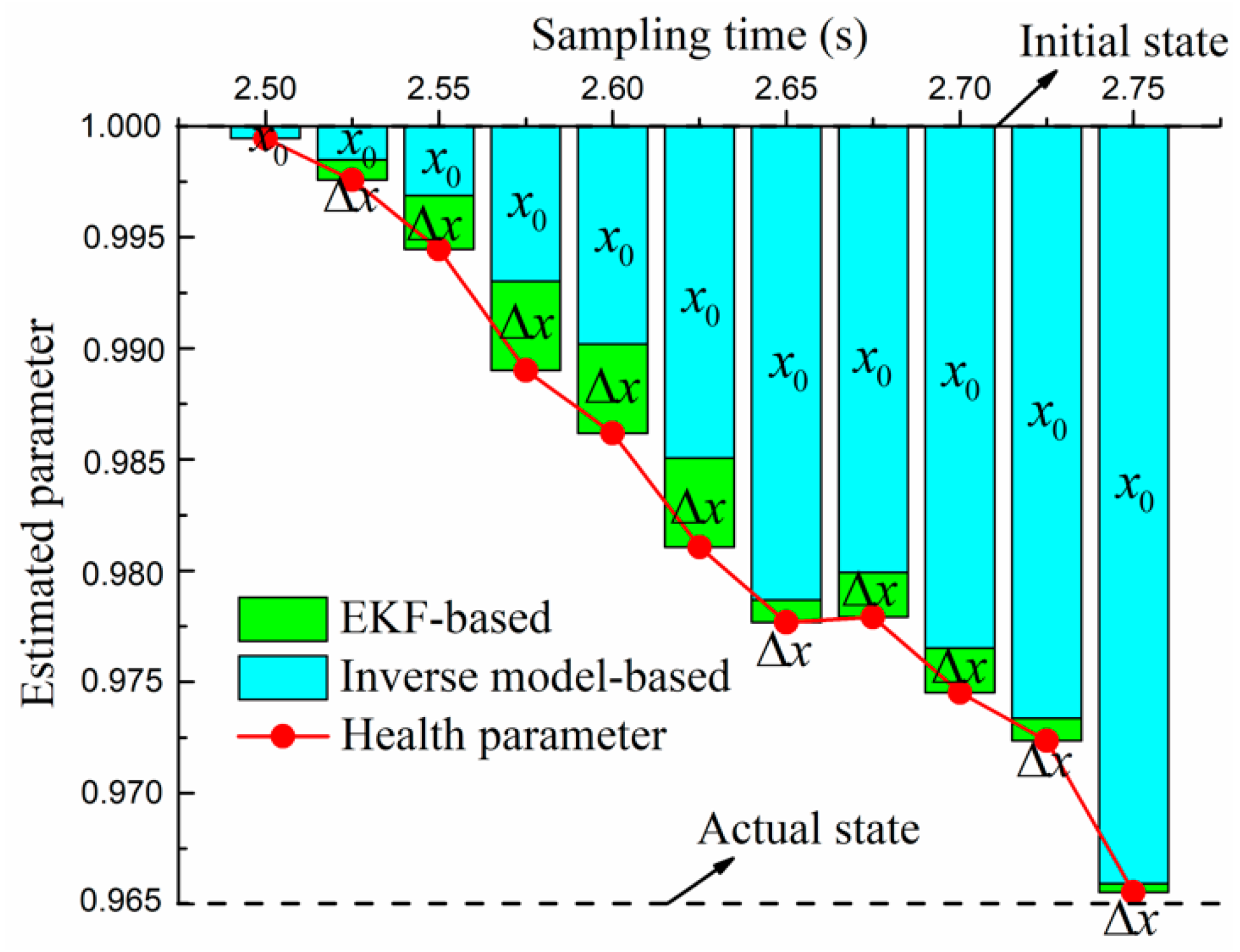
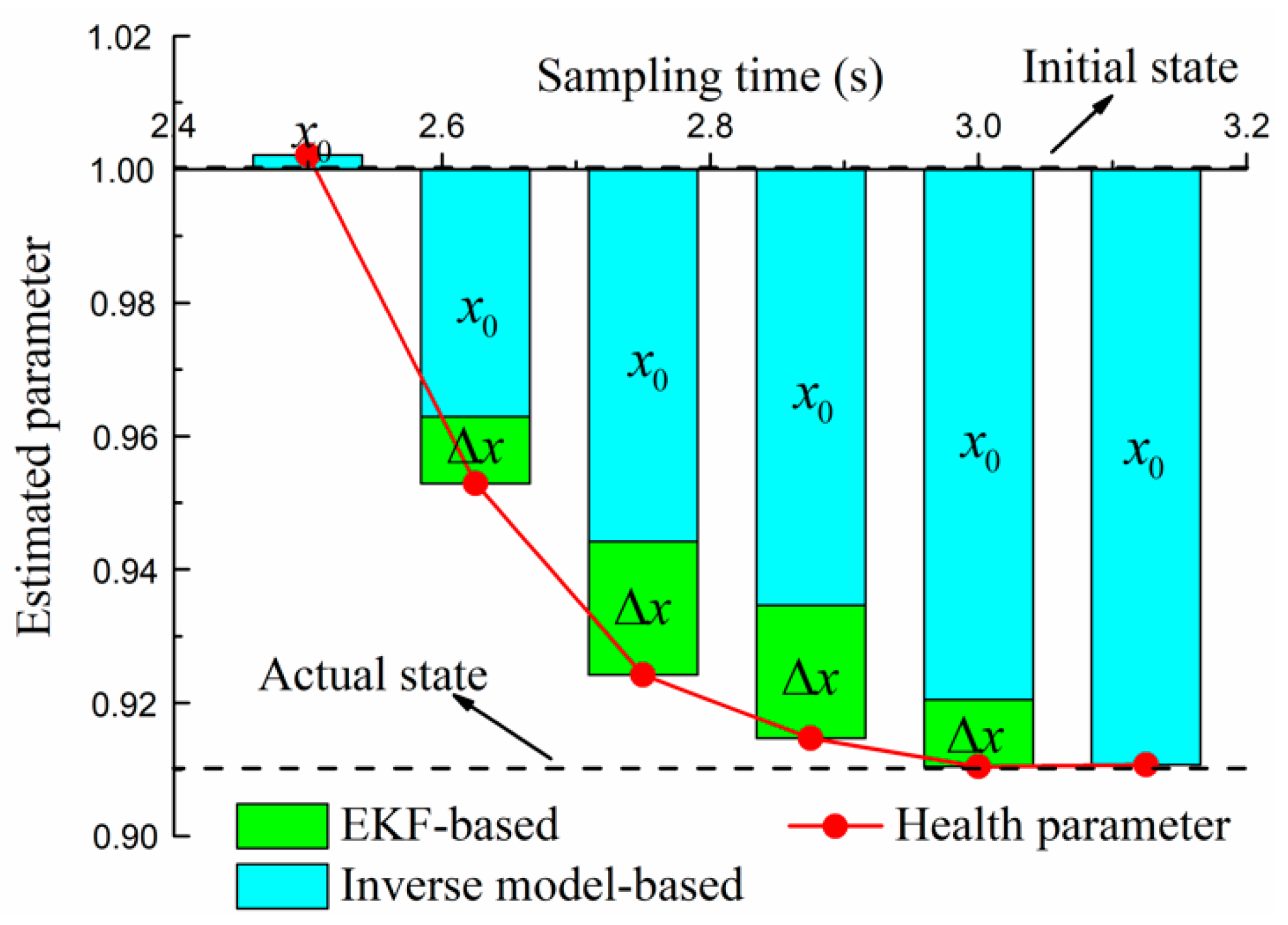
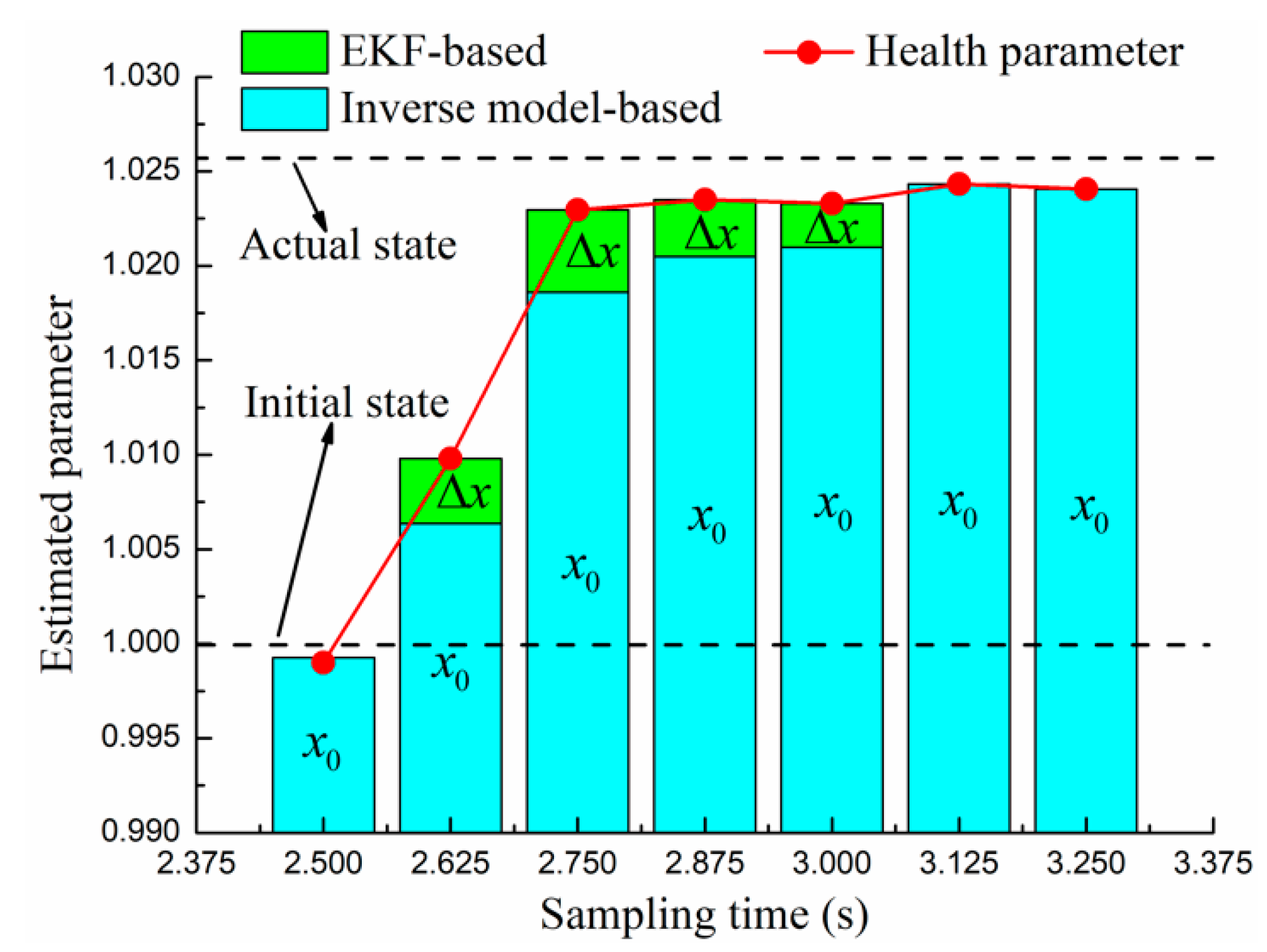
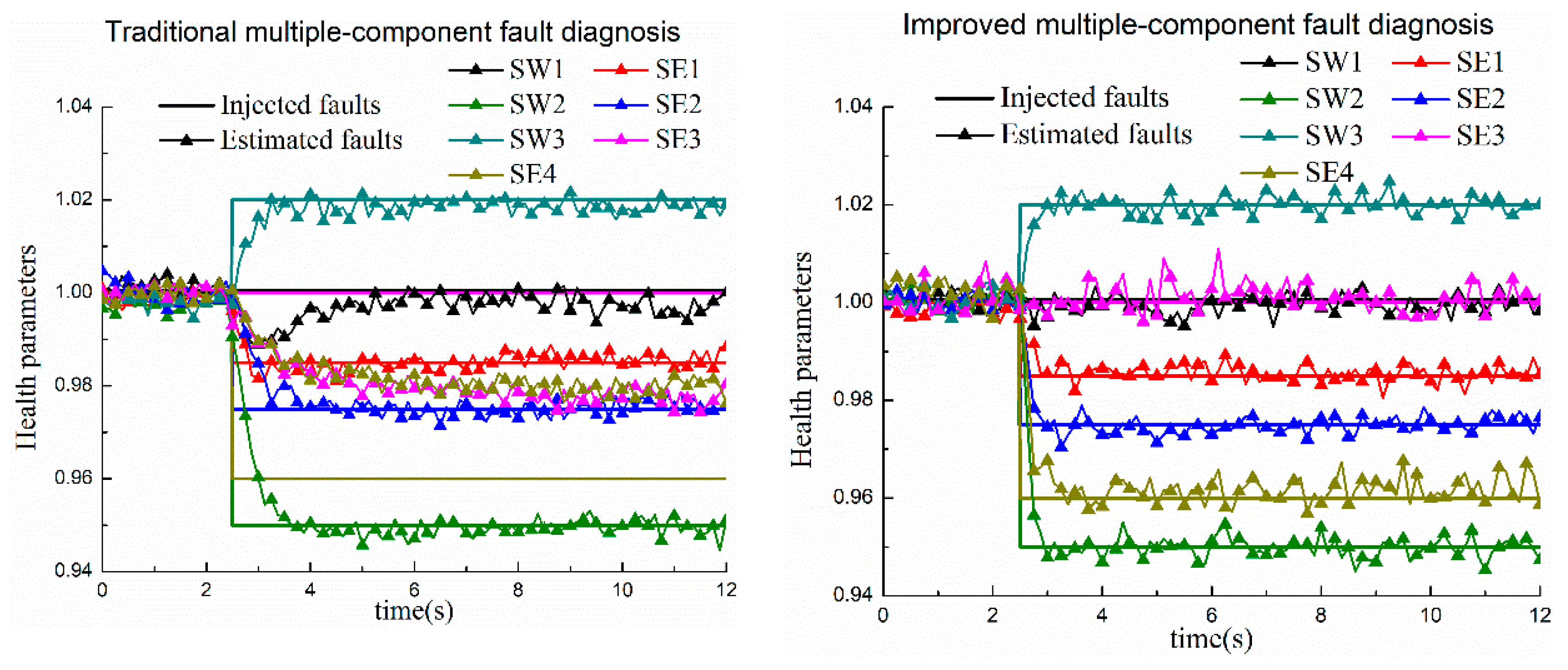
4.2. Performance Diagnostic Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Notations | |||
| P | Pressure | Scaling factor | |
| Temperature | Rotating speed | ||
| Mass flow rate | Measurement | ||
| Pressure ratio | Objective function | ||
| Efficiency | Fuel-air ratio | ||
| Specific enthalpy | Internal energy | ||
| Specific entropy | Adjustment parameter | ||
| Power | Rotational inertia | ||
| State vector | Input vector | ||
| Output vector | Process noise | ||
| Measurement noise | Deviation matrix | ||
| Singular value | Kalman gain matrix | ||
| Jacobian matrix | Jacobian matrix | ||
| Pre-set value | Recovery coefficient | ||
| Subscripts | |||
| Component inlet | Corrected | ||
| Component outlet | Design point | ||
| Static | High-pressure shaft | ||
| Fan | Low-pressure shaft | ||
| HPC | Fuel flow | ||
| Combustor | Measurement | ||
| HPT | Mass flow rate | ||
| LPT | Efficiency | ||
| Time index | Sampling point |
References
- Kurz, R.; Brun, K.; Wollie, M. Degradation effects on industrial gas turbines. J. Eng. Gas Turbines Power 2009, 131, 062401. [Google Scholar] [CrossRef]
- Fentaye, A.D.; Gilani SI, U.H.; Baheta, A.T. Gas turbine gas path diagnostics: A review. MATEC Web Conf. 2016, 74, 00005. [Google Scholar] [CrossRef]
- Frank, P.M. Analytical and qualitative model-based fault diagnosis: A survey and some new results. Eur. J. Control 1996, 2, 6–28. [Google Scholar] [CrossRef]
- Ghorbanian, K.; Gholamrezaei, M. An artificial neural network approach to compressor performance prediction. Appl. Energy 2009, 86, 1210–1221. [Google Scholar] [CrossRef]
- Khustochka, O.; Yepifanov, S.; Zelenskyi, R.; Przysowa, R. Estimation of performance parameters of turbine engine components using experimental data in parametric uncertainty conditions. Aerospace 2020, 7, 6. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Liu, H.; Dong, K. A new component map generation method of aero engine based on experimental data. Aeronaut. Comput. Tech. 2009, 39, 48–51. [Google Scholar]
- Khumprom, P.; Grewell, D.; Yodo, N. Deep Neural Network Feature Selection Approaches for Data-Driven Prognostic Model of Aircraft Engines. Aerospace 2020, 7, 132. [Google Scholar] [CrossRef]
- Stamatis, A.; Mathioudakis, K.; Papailiou, K.D. Adaptive simulation of gas turbine performance. J. Eng. Gas Turbines Power 1990, 112, 168–175. [Google Scholar] [CrossRef]
- Kong, C.; Ki, J.; Kang, M. A new scaling method for component maps of gas turbine using system identification. J. Eng. Gas Turbines Power 2003, 125, 979–985. [Google Scholar] [CrossRef]
- Kong, C.; Kho, S.; Ki, J. Component Map Generation of a Gas Turbine Using Genetic Algorithms. J. Eng. Gas Turbines Power 2004, 128, 92–96. [Google Scholar] [CrossRef]
- Li, Y.G.; Ghafir, M.F.A.; Wang, L.; Singh, R.; Huang, K.; Feng, X. Non-Linear Multiple Points Gas Turbine Off-Design Performance Adaptation Using a Genetic Algorithm. J. Eng. Gas Turbines Power 2010, 133, 521–532. [Google Scholar]
- Tsoutsanis, E.; Meskin, N.; Benammar, M.; Khorasani, K. An Efficient Component Map Generation Method for Prediction of Gas turbine Performance. In Proceedings of the ASME Turbo Expo 2014: Turbine Technical Conference and Exposition, Düsseldorf, Germany, 16–20 June 2014; p. 45752. [Google Scholar]
- Tsoutsanis, E.; Meskin, N.; Benammar, M.; Khorasani, K. A component map tuning method for performance prediction and diagnostics of gas turbine compressors. Appl. Energy 2014, 135, 572–585. [Google Scholar] [CrossRef] [Green Version]
- Urban, L.A. Gas Path Analysis Applied to Turbine Engine Condition Monitoring. J. Aircr. 1973, 10, 400–406. [Google Scholar] [CrossRef]
- Doel, D.L. TEMPER-A gas path analysis tool for commercial jet engines. J. Eng. Gas Turbines Power 1994, 116, 82–89. [Google Scholar] [CrossRef]
- Pratt & Whintey. Module Analysis Program Network (Mapnet) Training Guide; Pratt & Whintey Customer Training Center: East Hartford, CT, USA, 1997. [Google Scholar]
- Bai, J.; Fan, Z.; Sun, C. Consistence criterion for engine fault diagnosis decision. In Proceedings of the Third Asian-Pacific Conference on Aerospace Technology and Science, Kunming, China, 4–8 October 2000; pp. 407–413. [Google Scholar]
- Brotherton, T.; Volponi, A.; Luppold, R.; Simon, D.L. eSTORM: Enhanced Self Tuning On-board Real-time Engine Model. In Proceedings of the 2003 IEEE Aerospace Conference, Big Sky, MT, USA, 8–15 March 2003; p. 1023. [Google Scholar]
- Simon, D.L. Kalman filtering with inequality constraints for turbofan engine health estimation. Iee Proc. Control Theory Appl. 2007, 153, 371–378. [Google Scholar] [CrossRef] [Green Version]
- Simon, D.; Simon, D.L. Constrained Kalman filtering via density function truncation for turbofan engine health estimation. Int. J. Syst. Sci. 2010, 41, 159–171. [Google Scholar] [CrossRef]
- Ljung, L. Asymptotic Behavior of the Extended Kalman Filter as a Parameter Estimation for Linear Systems. IEEE Trans. Autom. Control 1979, 24, 36–50. [Google Scholar] [CrossRef] [Green Version]
- Kandepu, R.; Foss, B.; Imsland, L. Applying the unscented Kalman filter for nonlinear state estimation. J. Process Control 2008, 18, 753–768. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Simon, D. A comparison of filtering approaches for aircraft engine health estimation. Aerosp. Sci. Technol. 2008, 12, 276–284. [Google Scholar] [CrossRef] [Green Version]
- Lu, F.; Ju, H.; Huang, J. An improved extended Kalman filter with inequality constraints for gas turbine engine health monitoring. Aerosp. Sci. Technol. 2016, 58, 36–47. [Google Scholar] [CrossRef]
- Wang, C.; Huang, J.; Lu, F.; Zhou, W. Research on LPV-based model of a turbofan engine. In Proceedings of the 2015 12th International Bhurban Conference on Applied Sciences and Technology, Islamabad, Pakistan, 13–17 January 2015; IBCAST 2015. pp. 141–145. [Google Scholar]
- Hanachi, H.; Liu, J.; Mechefske, C. Multi-mode diagnosis of a gas turbine engine using an adaptive neuro-fuzzy system. Chin. J. Aeronaut. 2018, 31, 1–9. [Google Scholar] [CrossRef]
- Kobayashi, T.; Simon, D.L. Hybrid neural-network genetic-algorithm technique for aircraft engine performance diagnostics. J. Propuls. Power 2005, 21, 751–758. [Google Scholar] [CrossRef]
- Dewallef, P.; Romessis, C.; LéOnard, O.; Mathioudakis, K. Combining Classification Techniques with Kalman Filters for Aircraft Engine Diagnostics. J. Eng. Gas Turbines Power 2006, 128, 595–603. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Kong, X.; Wang, X. Model-based fault diagnosis for performance degradations of turbofan gas path via optimal robust residuals. In Proceedings of the ASME Turbo Expo 2016: Turbomachinery Technical Conference and Exposition, Seoul, Korea, 13–17 June 2016; p. V006T05A004. [Google Scholar]
- Li, Y.G. Performance-analysis-based gas turbine diagnostics: A review. Proc. Inst. Mech. Eng. Part A J. Power Energy 2002, 216, 363–377. [Google Scholar] [CrossRef] [Green Version]
- Volponi, A.J. Sensor error compensation in engine performance diagnostics. In Proceedings of the ASME 1994 International Gas Turbine and Aeroengine Congress and Exposition, the Hague, The Netherlands, 13–16 June 1994; p. 78873. [Google Scholar]
- Zhou, X.; Lu, F.; Huang, J.Q. Fault diagnosis based on measurement reconstruction of HPT exit pressure for turbofan engine. Chin. J. Aeronaut. 2019, 32, 1156–1170. [Google Scholar] [CrossRef]
- Litt, J.S.; Parker, K.J.; Chatterjee, S. Adaptive Gas Turbine Engine Control for Deterioration Compensation due to Aging. Technical Report TM 2003-212607; NASA Glenn: Lewis, OH, USA, 2003. [Google Scholar]
- Tsoutsanis, E.; Meskin, N.; Benammar, M.; Khorasani, K. Transient Gas Turbine Performance Diagnostics through Nonlinear Adaptation of Compressor and Turbine Maps. J. Eng. Gas Turbines Power 2015, 137, 091201. [Google Scholar] [CrossRef]
- Sellers, J.F.; Daniele, C.J. DYNGEN: A Program for Calculating Steady-State and Transient Performance of Turbojet and Turbofan Engines; NASA-TN-D-7901; National Aeronautics and Space Administration: Washington, DC, USA, 1975. [Google Scholar]
- Wang, X.; Chen, Z.; Yuan, Z. Nonlinear tracking-differentiator with high speed in whole course. Control Theory Appl. 2003, 20, 214–222. [Google Scholar]
- Zhou, W.; Huang, J.; Dou, J.; Shen, F. Object-oriented simulation platform for turbofan engine and its control system. J. Aerosp. Power 2007, 22, 119–125. (In Chinese) [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
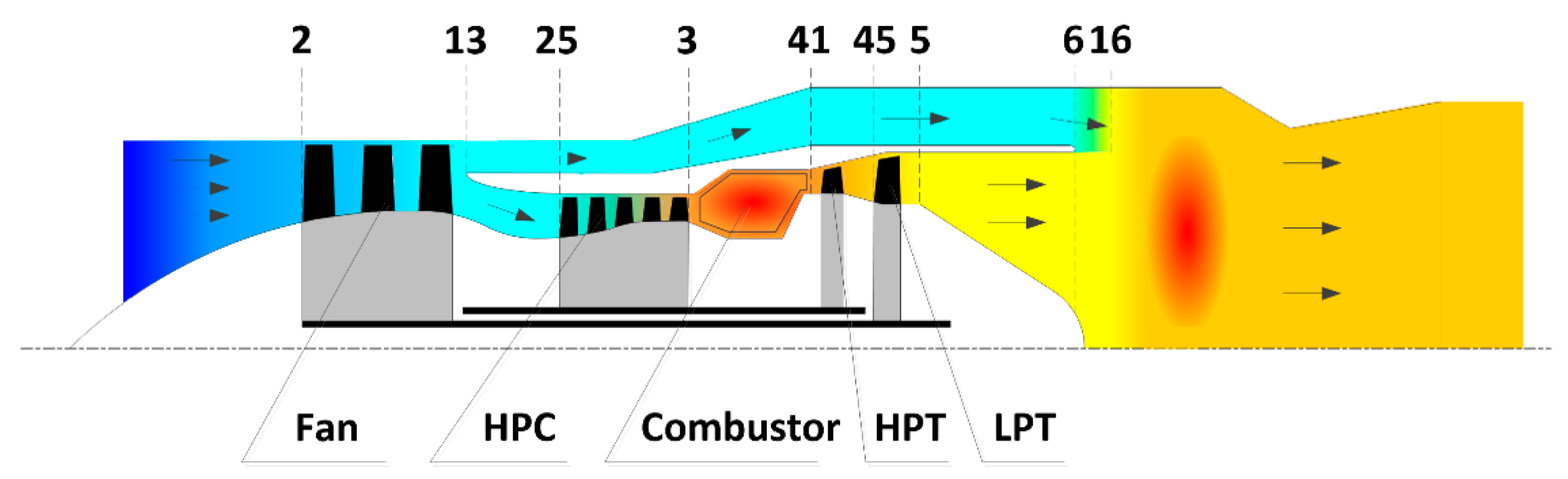
| Section Number | Definition | Section Number | Definition |
|---|---|---|---|
| 2 | Fan inlet | 6 | Core outlet |
| 25 | HPC inlet | 13 | Bypass inlet |
| 3 | HPC outlet | 16 | Bypass outlet |
| 4 | Combustor outlet | 65 | Mixer outlet |
| 45 | HPT outlet | 7 | Nozzle inlet |
| 5 | LPT outlet | 9 | Nozzle outlet |
| Objectives | Scaling Factors | |
|---|---|---|
| Fan | ||
| HPC | ||
| Combustor | ||
| HPT | ||
| LPT | ||
| Measurement | ||
| Flight Cycles | Fan | LPC | HPC | HPT | LPT | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| (%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 3000 | −1.5 | −2.04 | −1.46 | −2.08 | −2.94 | −3.91 | −2.63 | 1.76 | −0.54 | 0.26 |
| 6000 | −2.18 | −2.85 | −2.04 | −3.04 | −6.17 | −8.99 | −3.22 | 2.17 | −0.81 | 0.34 |
| 9000 | −2.85 | −3.65 | −2.61 | −4.00 | −9.40 | −14.06 | −3.81 | 2.57 | −1.08 | 0.42 |
| Point | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| (%) | 7.05 | 23.25 | 27.10 | 58.92 | 67.97 | 79.45 | 84.41 |
| (%) | 100.00 | 50.00 | 50.00 | 50.00 | 50.00 | 50.00 | 50.00 |
| (%) | 100.00 | 54.67 | 54.67 | 54.67 | 54.67 | 54.67 | 54.67 |
| Point | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Original model | 1 | −14.76 | −12.07 | −4.51 | −11.98 | −12.04 | −33.31 | 7.88 | −0.61 | −1.43 | −6.43 |
| 2 | −10.96 | −1.60 | −3.53 | −4.00 | −4.94 | −13.32 | 10.73 | 0.77 | −2.69 | −1.20 | |
| 3 | −9.22 | −1.87 | −3.48 | −4.18 | −4.62 | −13.49 | 11.21 | 1.35 | −2.94 | −1.29 | |
| 4 | −1.80 | 0.11 | −0.93 | 0.61 | −1.97 | −9.41 | 11.01 | 3.16 | −3.02 | 2.28 | |
| 5 | −1.87 | 0.36 | −0.38 | 1.70 | −1.49 | −9.17 | 11.74 | 3.32 | −2.37 | 2.97 | |
| 6 | −2.10 | 1.07 | 0.28 | 2.23 | −1.16 | −8.84 | 11.56 | 3.06 | −2.04 | 3.24 | |
| 7 | −1.73 | 0.86 | −0.03 | 2.64 | −1.56 | −8.59 | 10.87 | 3.67 | −1.95 | 3.80 | |
| Modified model | 1 | 1.53 | −0.25 | −0.12 | −0.38 | −0.03 | −0.18 | 0.23 | −1.24 | −0.09 | 1.01 |
| 2 | −0.48 | −0.07 | −0.15 | −0.44 | −0.15 | −0.46 | 0.35 | 0.39 | −0.19 | −0.26 | |
| 3 | −0.27 | −0.09 | −0.21 | −0.72 | −0.19 | −0.76 | 0.57 | 0.20 | −0.24 | −0.13 | |
| 4 | 0.01 | 0.18 | −0.10 | −0.33 | −0.05 | −0.09 | −0.02 | 0.08 | −0.61 | −0.11 | |
| 5 | −0.11 | 0.16 | −0.06 | −0.24 | −0.02 | −0.10 | 0.02 | −0.01 | −0.52 | −0.25 | |
| 6 | −0.17 | 0.16 | −0.06 | −0.17 | −0.02 | −0.04 | 0.04 | 0.00 | −0.80 | −0.12 | |
| 7 | −0.07 | 0.14 | −0.05 | −0.14 | −0.01 | −0.02 | 0.06 | 0.01 | −0.81 | −0.18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, S.; Zhou, W.; Huang, J.; Lu, F.; Chen, Z. A Novel Performance Adaptation and Diagnostic Method for Aero-Engines Based on the Aerothermodynamic Inverse Model. Aerospace 2022, 9, 16. https://doi.org/10.3390/aerospace9010016
Lu S, Zhou W, Huang J, Lu F, Chen Z. A Novel Performance Adaptation and Diagnostic Method for Aero-Engines Based on the Aerothermodynamic Inverse Model. Aerospace. 2022; 9(1):16. https://doi.org/10.3390/aerospace9010016
Chicago/Turabian StyleLu, Sangwei, Wenxiang Zhou, Jinquan Huang, Feng Lu, and Zhongguang Chen. 2022. "A Novel Performance Adaptation and Diagnostic Method for Aero-Engines Based on the Aerothermodynamic Inverse Model" Aerospace 9, no. 1: 16. https://doi.org/10.3390/aerospace9010016
APA StyleLu, S., Zhou, W., Huang, J., Lu, F., & Chen, Z. (2022). A Novel Performance Adaptation and Diagnostic Method for Aero-Engines Based on the Aerothermodynamic Inverse Model. Aerospace, 9(1), 16. https://doi.org/10.3390/aerospace9010016