
Real-Time Precise Orbit Determination for LEO between Kinematic and Reduced-Dynamic with Ambiguity Resolution


Abstract
:1. Introduction
2. Methodology of Ambiguity Resolution
2.1. Observation Model
- , : pseudo-range and carrier-phase observation (m).
- : geometric distance between ground receivers/LEO spaceborne receivers and GNSS satellites s antenna centers (m).
- : speed of light (m/s).
- : ground receivers/LEO spaceborne receivers clock offsets (s).
- : GNSS satellites clock offsets (s).
- : ionospheric delay (m).
- : tropospheric delay (m). (LEO does not include tropospheric delay; Ground users include tropospheric delay).
- , : pseudo-range hardware delay biases of ground receivers/LEO spaceborne receivers and GNSS satellites (m).
- , : carrier-phase hardware delay biases of ground receivers/LEO spaceborne receivers and GNSS satellites (m).
- : signal wavelength of frequency f (m).
- : carrier-phase integer ambiguities (cycles).
- , : multipath effects (m) and unmodeled pseudo-range and carrier-phase errors (m).
2.2. Ambiguity-Resolution-Based IPC Products
- : observation of MW combination (m).
- : wavelength of the wide lane (WL) (m).
- : WL ambiguity (cycles).
- : WL ground receivers/LEO spaceborne receivers bias (WRB) (m).
- : WL GNSS satellites bias (WSB) (m).
- : multipath effects (m) and unmodeled errors of MW combination (m).
3. Experimental Data and Strategies of Real-Time PPP and LEO POD
3.1. Experimental Data
3.2. Real-Time PPP, LEO POD, LEO KPOD, and RPOD Strategies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | PPP | KPOD Models | RPOD Models |
|---|---|---|---|
| Observation model | Dual-frequency ionosphere-free combination model | ||
| Ionospheric delay | Ionosphere-free combination model is used to eliminate the first-order ionospheric delay, and the high-order ionospheric delays are neglected | ||
| Ambiguity | IAR based IPC | ||
| Receiver clock | Real-time estimated as white noise | ||
| GPS satellite orbit and clock | Real-time obtained with SSR corrections and broadcast ephemeris | ||
| WSB | Provided by CNES | ||
| Orbit/clock correction update interval | 5 s/5 s | ||
| Latency of orbit/clock corrections | 5 s | ||
| Cycle slip | MW and GF (geometry-free) [47] are used to detect cycle skip | ||
| Phase windup | Model correction [48] | ||
| Satellite antenna PCO/PCV | Igs14.atx [49] (ftp://ftp.aiub.unibe.ch/awg (accessed on 15 October 2021)) | ||
| Estimator | EKF (Extended Kalman filter) | ||
| Co-ordinate frame | ECEF (Earth-centered, Earth-fixed) | ||
| Sampling rate | 30 s | 10 s | |
| Cut-off elevation angle | 15° | 5° | |
| Receiver antenna PCO/PCV | Igs14.atx | Official nominal-value correction of PCO and ignore PCV (ftp://isdcftp.gfz-potsdam.de (accessed on 15 October 2021)) [14] | |
| Tropospheric delay | Real-time estimation as random-walk noise | None | |
| Empirical acceleration | None | None | Real-time estimation in the R, A, and C directions |
| Earth gravity field model | None | None | GGM05 (75 × 75) [50] |
| Earth tides | None | None | k20 Solid tides [46] |
| EOP | None | None | EOP (IERS) 14 C04 [51] |
| N-body | None | None | Low-precision model |
| Atmospheric density | None | None | Harris-Priester [46], air-drag coefficient a priori value is 2.3 |
| Solar radiation pressure | None | None | Macro model [46], solar-radiation coefficient a priori value is 1.3 |
4. Results of Real-Time Ambiguity Resolution
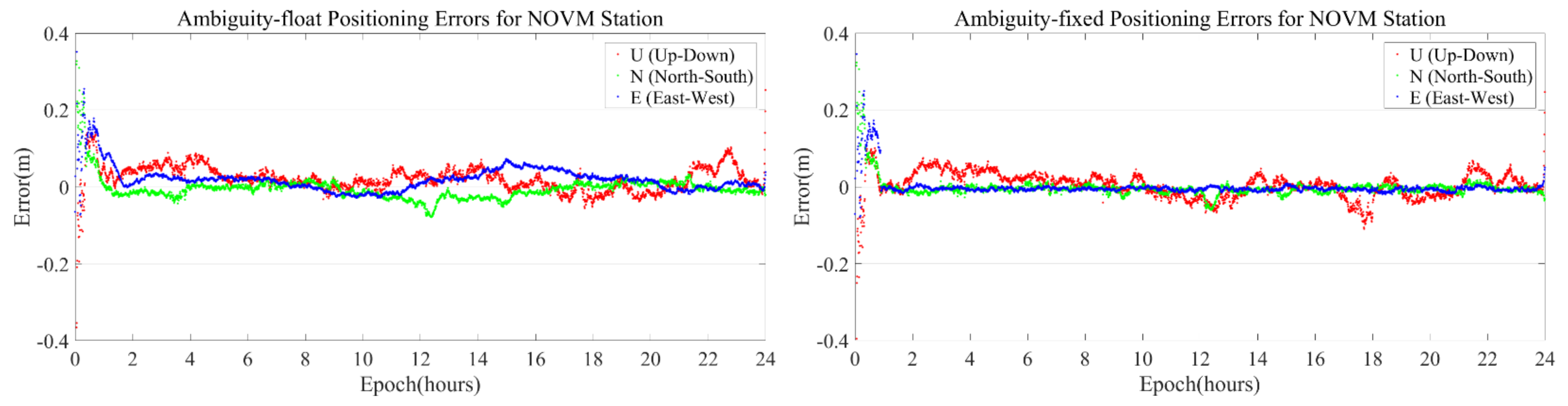
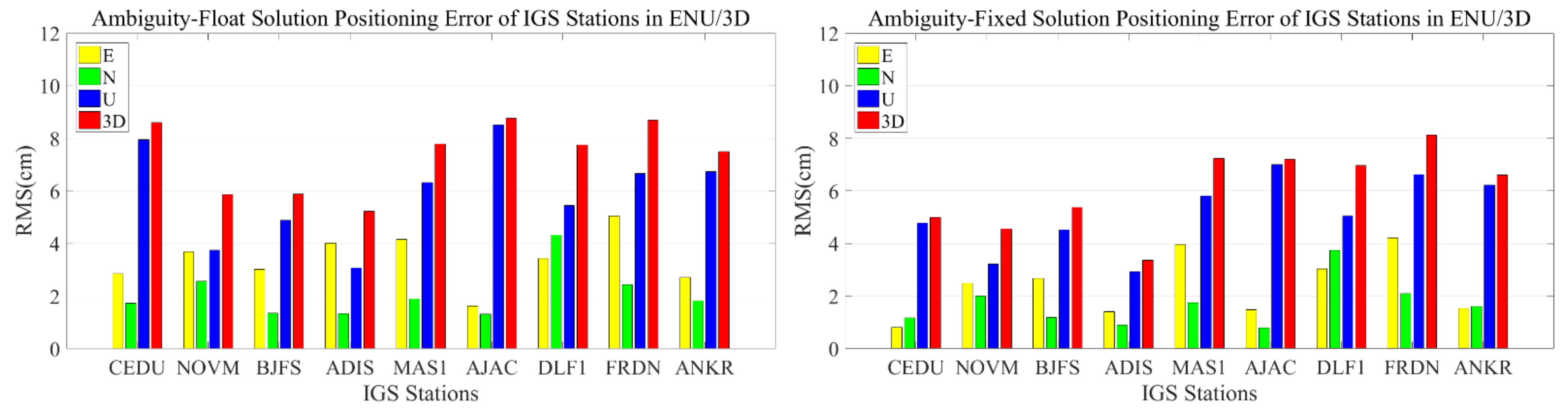
4.1. Validation Results of Real-Time Ambiguity Resolution for PPP
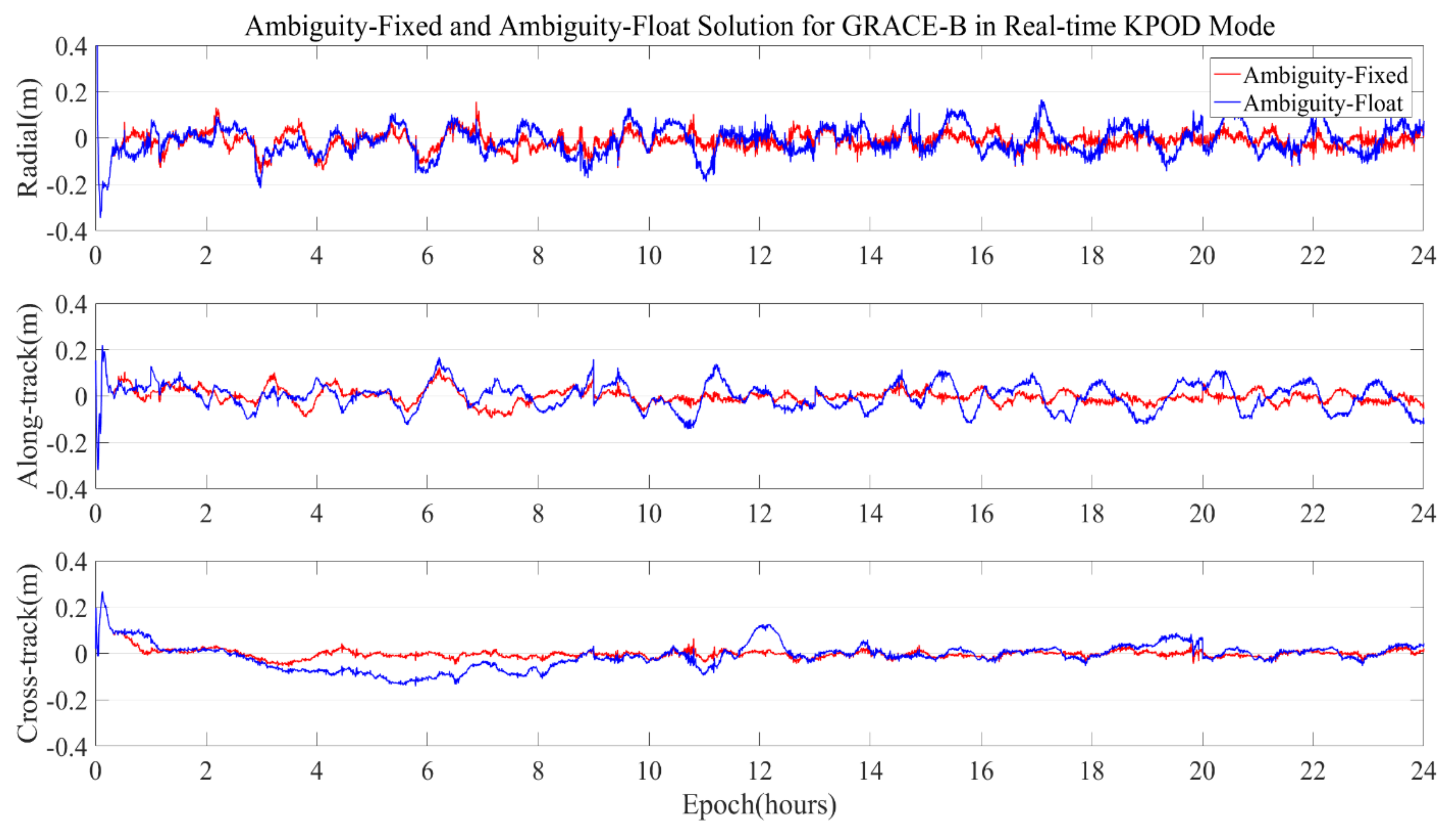
4.2. Validation Results of Real-Time Ambiguity Resolution for LEO KPOD
4.3. Validation Results of Real-Time Ambiguity Resolution for LEO RPOD
5. Conclusions
- The average accuracy of positioning error (3D-RMS) for the real-time PPP, both with ambiguity-fixed and ambiguity-float solutions, can achieve centimeter-level accuracy. Compared with the float PPP solutions, the average positioning errors of ambiguity-fixed solutions in the horizontal and vertical directions are improved by 26% and 13%, respectively, the accuracy improvement in the east-west direction is the most significant, at about 29%.
- After applying the integer-ambiguity resolution to the real-time KPOD mode for GRACE series satellites, the average accuracies (3D-RMS) of GRACE-A and GRACE-B in the abovementioned mode are about 6.92 cm and 7.02 cm, respectively. In comparison with real-time KPOD with ambiguity-float solutions, the average improvement in position for these two satellites, GRACE-A and GRACE-B, is approximately 16%.
- In the real-time RPOD mode, a comparison of orbital accuracy between ambiguity-float and ambiguity-fixed solutions for GRACE satellites shows that the average real-time RPOD accuracy (3D-RMS) with ambiguity-fixed solutions is better (about 10%) than that with float solutions. Regardless of fixed- or float-ambiguity solutions, the performance of real-time RPOD is better than that of the corresponding KPOD. However, when the constraints of the dynamic model are applied in real-time RPOD mode, the increase in the accuracy under the real-time RPOD mode is not as obvious as under the real-time KPOD mode without the constraints of the dynamic model. Moreover, the average ambiguity-fixing ratio in the real-time PPP, KPOD, and RPOD was above 90% during the test period.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D-RMS | Three-dimensional root mean square |
| A | Along-track |
| AU/NZ | Australian/New Zealand |
| BDS-3 | BeiDou navigation satellite system |
| CNES | Centre National d’Etudes Spatiales |
| C | Cross-track |
| DD | Double-difference |
| EKF | Extended Kalman filter |
| ECEF | Earth-centered, Earth-fixed |
| EOP | Earth orientation parameters |
| E | East-west |
| GGM05 | GRACE Gravity Model 05 |
| GNSS | Global navigation satellite systems |
| GRACE | Gravity recovery and climate experiment |
| GEO | Geostationary earth orbit |
| GPS | Global positioning system |
| GF | Geometry-free |
| HDB | Hardware delay biases |
| IPC | Integer phase clock |
| IGS | International GNSS Service |
| IAR | Integer-ambiguity resolution |
| IERS | International Earth Rotation Service |
| ISDC | Information System and Data Centre |
| JPL | Jet Propulsion Laboratory |
| KPOD | Kinematic precise orbit determination |
| LEO | Low earth orbit |
| MW | Melbourne-Wübbena |
| NL | Narrow-lane |
| N | North-south |
| PPP | Precise point positioning |
| POD | Precise orbit determination |
| PCO | Phase center offset |
| PCV | Phase center variation |
| QZSS | Quasi-Zenith Satellite System |
| RPOD | Reduced-dynamic precise orbit determination |
| RTPP | Real-time pilot project |
| RTCM | Radio Technical Commission for Maritime Services |
| R | Radial |
| SSR | State-space representation |
| SBAS | Satellite-based augmentation systems |
| SDBS | Single difference between GNSS satellites |
| UPD | Uncalibrated phase delays |
| U | Up-sown |
| WSB | Wide-lane satellite bias |
| WL | Wide-lane |
| WRB | Wide-lane ground receivers/LEO spaceborne receiver bias |
References
- Chen, C.-R.; Hwang, F.-T.; Hsueh, C.-W. Mission Studies on Constellation of Leo Satellites with Remote-Sensing and Communication Payloads. In Earth Observing Systems XXII; International Society for Optics and Photonics: San Diego, CA, USA, 2017; p. 1040207. [Google Scholar]
- Ravanbakhsh, A.; Franchini, S. System engineering approach to initial design of leo remote sensing missions. In Proceedings of the 2013 6th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 12–14 June 2013; pp. 659–664. [Google Scholar]
- Gagliardi, F.; Vaccaro, A.; Villacci, D. Performance analysis of leo satellites based communication systems for remote monitoring and protection of power components. In Proceedings of the 2003 IEEE Bologna Power Tech Conference Proceedings, Bologna, Italy, 23–26 June 2003; Volume 2, p. 6. [Google Scholar]
- Pelton, J.N.; Madry, S.; Camacho-Lara, S. Satellite applications handbook: The complete guide to satellite communications, remote sensing, navigation, and meteorology. In Handbook of Satellite Application; Springer: New York, NY, USA, 2013; pp. 3–19. [Google Scholar]
- König, R.; Zhu, S.; Reigber, C.; Neumayer, K.-H.; Meixner, H.; Galas, R.; Baustert, G.; Schwintzer, P. Champ rapid orbit determination for gps atmospheric limb sounding. Adv. Space Res. 2002, 30, 289–293. [Google Scholar] [CrossRef]
- Wickert, J.; Beyerle, G.; König, R.; Heise, S.; Grunwaldt, L.; Michalak, G.; Reigber, C.; Schmidt, T. Gps radio occultation with champ and grace: A first look at a new and promising satellite configuration for global atmospheric sounding. In Annales Geophysicae; Copernicus GmbH: Göttingen, Germany, 2005; pp. 653–658. [Google Scholar]
- Kursinski, E.; Hajj, G.; Schofield, J.; Linfield, R.; Hardy, K.R. Observing earth’s atmosphere with radio occultation measurements using the global positioning system. J. Geophys. Res. Atmos. 1997, 102, 23429–23465. [Google Scholar] [CrossRef]
- Wickert, J.; Reigber, C.; Beyerle, G.; König, R.; Marquardt, C.; Schmidt, T.; Grunwaldt, L.; Galas, R.; Meehan, T.K.; Melbourne, W.G. Atmosphere sounding by gps radio occultation: First results from champ. Geophys. Res. Lett. 2001, 28, 3263–3266. [Google Scholar] [CrossRef] [Green Version]
- Cerri, L.; Berthias, J.; Bertiger, W.; Haines, B.; Lemoine, F.; Mercier, F.; Ries, J.; Willis, P.; Zelensky, N.; Ziebart, M. Precision orbit determination standards for the jason series of altimeter missions. Mar. Geod. 2010, 33, 379–418. [Google Scholar] [CrossRef]
- Martín-Neira, M.; D’Addio, S.; Buck, C.; Floury, N.; Prieto-Cerdeira, R. The paris ocean altimeter in-orbit demonstrator. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2209–2237. [Google Scholar] [CrossRef]
- Li, B.; Ge, H.; Ge, M.; Nie, L.; Shen, Y.; Schuh, H. Leo enhanced global navigation satellite system (legnss) for real-time precise positioning services. Adv. Space Res. 2019, 63, 73–93. [Google Scholar] [CrossRef]
- Li, X.; Dick, G.; Lu, C.; Ge, M.; Nilsson, T.; Ning, T.; Wickert, J.; Schuh, H. Multi-gnss meteorology: Real-time retrieving of atmospheric water vapor from beidou, galileo, glonass, and gps observations. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6385–6393. [Google Scholar] [CrossRef] [Green Version]
- Hadas, T.; Bosy, J. Igs rts precise orbits and clocks verification and quality degradation over time. GPS Solut. 2015, 19, 93–105. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Li, Z.; Wang, L.; Wang, N.; Yang, Y.; Li, R.; Zhang, Y.; Liu, A.; Yuan, H.; Hoque, M. Comparison of the real-time precise orbit determination for leo between kinematic and reduced-dynamic modes. Measurement 2021, 187, 110224. [Google Scholar] [CrossRef]
- Hauschild, A.; Tegedor, J.; Montenbruck, O.; Visser, H.; Markgraf, M. Precise onboard orbit determination for leo satellites with real-time orbit and clock corrections. In Proceedings of the 29th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 3715–3723. [Google Scholar]
- Liu, C.; Gao, W.; Liu, T.; Wang, D.; Yao, Z.; Gao, Y.; Nie, X.; Wang, W.; Li, D.; Zhang, W. Design and implementation of a bds precise point positioning service. Navig. J. Inst. Navig. 2020, 67, 875–891. [Google Scholar] [CrossRef]
- Yang, Y.; Mao, Y.; Sun, B. Basic performance and future developments of beidou global navigation satellite system. Satell. Navig. 2020, 1, 1. [Google Scholar] [CrossRef] [Green Version]
- Allahvirdi-Zadeh, A.; Wang, K.; El-Mowafy, A. Pod of small leo satellites based on precise real-time madoca and sbas-aided ppp corrections. GPS Solut. 2021, 25, 31. [Google Scholar] [CrossRef]
- Miya, M.; Fujita, S.; Sato, Y.; Kaneko, K.; Shima, Y.; Hirokawa, R.; Sone, H.; Takiguchi, J.-I. Centimeter level augmentation service (clas) in japanese quasi-zenith satellite system, design for satellite based rtk-ppp services. In Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015; pp. 1958–1962. [Google Scholar]
- Chatre, E.; Benedicto, J. 2019–galileo programme update. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 650–698. [Google Scholar]
- Wu, S.-C.; Yunck, T.P.; Thornton, C.L. Reduced-dynamic technique for precise orbit determination of low earth satellites. J. Guid. Control Dyn. 1991, 14, 24–30. [Google Scholar] [CrossRef]
- Švehla, D.; Rothacher, M. Kinematic and reduced-dynamic precise orbit determination of low earth orbiters. Adv. Geosci. 2003, 1, 47–56. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Wu, J.; Zhang, K.; Li, X.; Xiong, Y.; Zhang, Q. Real-time kinematic precise orbit determination for leo satellites using zero-differenced ambiguity resolution. Remote Sens. 2019, 11, 2815. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Teferle, F.N.; Shi, C.; Meng, X.; Dodson, A.; Liu, J. Ambiguity resolution in precise point positioning with hourly data. GPS Solut. 2009, 13, 263–270. [Google Scholar] [CrossRef] [Green Version]
- Jäggi, A.; Hugentobler, U.; Bock, H.; Beutler, G. Precise orbit determination for grace using undifferenced or doubly differenced gps data. Adv. Space Res. 2007, 39, 1612–1619. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.a.; Shi, C.; Liu, J. Resolution of gps carrier-phase ambiguities in precise point positioning (ppp) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Laurichesse, D.; Mercier, F.; Berthias, J.P.; Broca, P.; Cerri, L. Integer ambiguity resolution on undifferenced gps phase measurements and its application to ppp and satellite precise orbit determination. Navigation 2009, 56, 135–149. [Google Scholar] [CrossRef]
- Chen, X. An alternative integer recovery clock method for precise point positioning with ambiguity resolution. Satell. Navig. 2020, 1, 28. [Google Scholar] [CrossRef]
- Loyer, S.; Perosanz, F.; Mercier, F.; Capdeville, H.; Marty, J.-C. Zero-difference gps ambiguity resolution at cnes–cls igs analysis center. J. Geod. 2012, 86, 991–1003. [Google Scholar] [CrossRef]
- Katsigianni, G.; Loyer, S.; Perosanz, F.; Mercier, F.; Zajdel, R.; Sośnica, K. Improving galileo orbit determination using zero-difference ambiguity fixing in a multi-gnss processing. Adv. Space Res. 2019, 63, 2952–2963. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hackel, S.; van den Ijssel, J.; Arnold, D. Reduced dynamic and kinematic precise orbit determination for the swarm mission from 4 years of gps tracking. GPS Solut. 2018, 22, 79. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. Gnss–Global Navigation Satellite Systems: Gps, Glonass, Galileo, and More; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Teunissen, P.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Wang, Z.; Li, Z.; Wang, L.; Wang, X.; Yuan, H. Assessment of multiple gnss real-time ssr products from different analysis centers. ISPRS Int. J. Geo-Inf. 2018, 7, 85. [Google Scholar] [CrossRef] [Green Version]
- Zhan, Y. Comparison between uofc model and ionosphere-free combination model in ppp. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2019; p. 022060. [Google Scholar]
- An, X.; Meng, X.; Jiang, W. Multi-constellation gnss precise point positioning with multi-frequency raw observations and dual-frequency observations of ionospheric-free linear combination. Satell. Navig. 2020, 1, 7. [Google Scholar] [CrossRef]
- Li, R.; Li, Z.; Wang, N.; Tang, C.; Ma, H.; Zhang, Y.; Wang, Z.; Wu, J. Considering inter-receiver pseudorange biases for bds-2 precise orbit determination. Measurement 2021, 177, 109251. [Google Scholar] [CrossRef]
- Yang, Y.; Yue, X.; Yuan, J. Gps based reduced-dynamic orbit determination for low earth orbiters with ambiguity fixing. Int. J. Aerosp. Eng. 2015, 2015, 723414. [Google Scholar] [CrossRef] [Green Version]
- Li, R.; Wang, N.; Li, Z.; Zhang, Y.; Wang, Z.; Ma, H. Precise orbit determination of bds-3 satellites using b1c and b2a dual-frequency measurements. GPS Solut. 2021, 25, 95. [Google Scholar] [CrossRef]
- Melbourne, W.G. The case for ranging in gps-based geodetic systems. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, US Department of Commerce, Rockville, MD, USA, 15–19 April 1985; pp. 373–386. [Google Scholar]
- Wübbena, G. Software developments for geodetic positioning with gps using ti4100 code and carrier measurements. In Proceedings of the 1st International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; pp. 403–412. [Google Scholar]
- Blewitt, G. Carrier phase ambiguity resolution for the global positioning system applied to geodetic baselines up to 2000 km. J. Geophys. Res. Solid Earth 1989, 94, 10187–10203. [Google Scholar] [CrossRef] [Green Version]
- Dong, D.N.; Bock, Y. Global positioning system network analysis with phase ambiguity resolution applied to crustal deformation studies in california. J. Geophys. Res. Solid Earth 1989, 94, 3949–3966. [Google Scholar] [CrossRef]
- Katsigianni, G.; Loyer, S.; Perosanz, F. Ppp and ppp-ar kinematic post-processed performance of gps-only, galileo-only and multi-gnss. Remote Sens. 2019, 11, 2477. [Google Scholar] [CrossRef] [Green Version]
- MarFn, A.; Hadas, T.; Dimas, A.; Anquela, A.; Berne, J. Influence of real-time products latency on kinematic ppp results. In Proceedings of the ESA 5th International Colloquium on Scientific and Fundamental Aspects of the Galileo Program, Braunschweig, Germany, 27–29 October 2015. [Google Scholar]
- Montenbruck, O.; Gill, E.; Lutze, F. Satellite orbits: Models, methods, and applications. Appl. Mech. Rev. 2002, 55, B27–B28. [Google Scholar] [CrossRef]
- Svehla, D. Integer ambiguity algebra. In Geometrical Theory of Satellite Orbits and Gravity Field; Springer: Berlin/Heidelberg, Germany, 2018; pp. 319–354. [Google Scholar]
- Wu, J.-T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on gps carrier phase. Manuscripta Geodaetica 1993, 18, 91–98. [Google Scholar]
- Kouba, J. A Guide to Using International Gnss Service (IGS) Products; IGS Central Bureau: Pasadena, CA, USA, 2009. Available online: http://igscb.jpl.nasa.gov/igscb/resource/pubs/GuidetoUsingIGSProducts.pdf (accessed on 6 December 2020).
- Ries, J.; Bettadpur, S.; Eanes, R.; Kang, Z.; Ko, U.-d.; McCullough, C.; Nagel, P.; Pie, N.; Poole, S.; Richter, T. The Development and Evaluation of the Global Gravity Model ggm05; Center for Space Research, The University of Texas: Austin, TX, USA, 2016. [Google Scholar] [CrossRef]
- Bizouard, C.; Lambert, S.; Gattano, C.; Becker, O.; Richard, J.-Y. The iers eop 14c04 solution for earth orientation parameters consistent with itrf 2014. J. Geod. 2019, 93, 621–633. [Google Scholar] [CrossRef]
- Xiao, G. Multi-Frequency and Multi-Gnss ppp Phase Bias Estimation and Ambiguity Resolution; Karlsruher Institut für Technologie (KIT): Karlsruhe, Germany, 2019. [Google Scholar]










| IGS Station | Solution Type | RMS (cm) | Fixed Ratio | Precision Improvement of 3D-RMS | |||
|---|---|---|---|---|---|---|---|
| E | N | U | 3D-RMS | ||||
| CEDU | Float | 2.85 | 1.73 | 7.94 | 8.61 | 96.3% | ↑ 42% |
| Fix | 0.80 | 1.17 | 4.78 | 4.99 | |||
| NOVM | Float | 3.69 | 2.57 | 3.75 | 5.86 | 96.2% | ↑ 22% |
| Fix | 2.50 | 2.01 | 3.22 | 4.55 | |||
| BJFS | Float | 3.01 | 1.35 | 4.88 | 5.89 | 94.3% | ↑ 9% |
| Fix | 2.67 | 1.18 | 4.52 | 5.38 | |||
| ADIS | Float | 4.02 | 1.34 | 3.07 | 5.23 | 97.1% | ↑ 36% |
| Fix | 1.41 | 0.90 | 2.93 | 3.37 | |||
| MAS1 | Float | 4.16 | 1.89 | 6.31 | 7.79 | 94.8% | ↑ 7% |
| Fix | 3.96 | 1.75 | 5.81 | 7.25 | |||
| AJAC | Float | 1.63 | 1.32 | 8.51 | 8.76 | 95.7% | ↑ 18% |
| Fix | 1.48 | 0.79 | 7.00 | 7.20 | |||
| DLF1 | Float | 3.43 | 4.32 | 5.45 | 7.75 | 94.4% | ↑ 10% |
| Fix | 3.04 | 3.74 | 5.04 | 6.97 | |||
| FRDN | Float | 5.04 | 2.43 | 6.66 | 8.70 | 89.3% | ↑ 7% |
| Fix | 4.22 | 2.10 | 6.62 | 8.13 | |||
| ANKR | Float | 2.71 | 1.82 | 6.74 | 7.49 | 98.0% | ↑ 12% |
| Fix | 1.53 | 1.61 | 6.23 | 6.61 | |||
| Average | Float | 3.39 | 2.09 | 5.92 | 7.14 | 95.1% | ↑ 17% |
| Fix | 2.40 | 1.69 | 5.13 | 5.91 | |||
| GRACE-B. | ||||||||
|---|---|---|---|---|---|---|---|---|
| Time | Method | Solution Type | RMS (cm) | Fixed Ratio | Precision Improvement of 3D-RMS | |||
| R | A | C | 3D-RMS | |||||
| 20170115 | KPOD | Float | 7.06 | 4.77 | 4.45 | 9.61 | 94.1% | ↑ 21% |
| Fix | 6.32 | 3.39 | 2.56 | 7.61 | ||||
| 20170116 | KPOD | Float | 6.31 | 4.02 | 3.21 | 8.14 | 90.4% | ↑ 17% |
| Fix | 4.87 | 3.62 | 2.98 | 6.76 | ||||
| 20170117 | KPOD | Float | 6.91 | 4.96 | 3.89 | 9.35 | 92.7% | ↑ 15% |
| Fix | 6.37 | 3.52 | 3.14 | 7.93 | ||||
| 20170118 | KPOD | Float | 7.03 | 3.88 | 2.54 | 8.42 | 94.8% | ↑ 22% |
| Fix | 4.72 | 3.61 | 2.83 | 6.58 | ||||
| 20170119 | KPOD | Float | 7.81 | 6.04 | 3.32 | 10.42 | 89.8% | ↑ 11% |
| Fix | 6.82 | 5.52 | 3.15 | 9.32 | ||||
| 20170120 | KPOD | Float | 4.94 | 4.31 | 3.92 | 7.64 | 91.9% | ↑ 16% |
| Fix | 3.88 | 3.67 | 3.57 | 6.42 | ||||
| 20170121 | KPOD | Float | 5.42 | 4.04 | 3.96 | 7.83 | 90.8% | ↑ 15% |
| Fix | 4.61 | 3.14 | 3.61 | 6.64 | ||||
| 20170122 | KPOD | Float | 5.44 | 3.65 | 3.47 | 7.41 | 91.5% | ↑ 15% |
| Fix | 4.57 | 3.32 | 2.79 | 6.30 | ||||
| 20170123 | KPOD | Float | 5.78 | 4.39 | 3.84 | 8.21 | 89.1% | ↑ 17% |
| Fix | 4.61 | 3.74 | 3.31 | 6.80 | ||||
| 20170124 | KPOD | Float | 4.83 | 3.95 | 4.66 | 7.79 | 93.4% | ↑ 18% |
| Fix | 3.88 | 3.35 | 3.76 | 6.36 | ||||
| Average | KPOP | Float | 6.05 | 4.40 | 3.73 | 8.36 | 91.9% | ↑ 16% |
| Fix | 5.07 | 3.69 | 3.17 | 7.02 | ||||
| GRACE-A | ||||||||
|---|---|---|---|---|---|---|---|---|
| Time | Method | Solution Type | RMS (cm) | Fixed Ratio | Precision Improvement of 3D-RMS | |||
| R | A | C | 3D-RMS | |||||
| 20170115 | KPOD | Float | 5.98 | 4.21 | 3.12 | 7.95 | 92.1% | ↑ 14% |
| Fix | 4.81 | 3.88 | 2.94 | 6.84 | ||||
| 20170116 | KPOD | Float | 7.31 | 4.53 | 3.66 | 9.35 | 93.6% | ↑ 16% |
| Fix | 6.33 | 3.4 | 3.14 | 7.84 | ||||
| 20170117 | KPOD | Float | 6.41 | 3.89 | 3.32 | 8.20 | 92.4% | ↑ 17% |
| Fix | 4.52 | 3.92 | 3.21 | 6.79 | ||||
| 20170118 | KPOD | Float | 4.88 | 4.36 | 3.62 | 7.48 | 94.2% | ↑ 18% |
| Fix | 3.74 | 3.71 | 3.15 | 6.14 | ||||
| 20170119 | KPOD | Float | 5.01 | 3.94 | 4.02 | 7.54 | 91.8% | ↑ 15% |
| Fix | 4.08 | 3.56 | 3.44 | 6.42 | ||||
| 20170120 | KPOD | Float | 5.64 | 3.88 | 3.67 | 7.77 | 94.6% | ↑ 18% |
| Fix | 4.41 | 2.99 | 3.5 | 6.37 | ||||
| 20170121 | KPOD | Float | 5.79 | 3.86 | 3.62 | 7.84 | 95.3% | ↑ 20% |
| Fix | 4.36 | 3.48 | 2.84 | 6.26 | ||||
| 20170122 | KPOD | Float | 5.22 | 4.54 | 3.81 | 7.90 | 93.3% | ↑ 16% |
| Fix | 4.44 | 3.73 | 3.19 | 6.62 | ||||
| 20170123 | KPOD | Float | 5.53 | 4.9 | 4.33 | 8.56 | 90.5% | ↑ 14% |
| Fix | 4.31 | 4.4 | 4.03 | 7.36 | ||||
| 20170124 | KPOD | Float | 7.24 | 5.88 | 3.41 | 9.93 | 90.7% | ↑ 10% |
| Fix | 6.44 | 5.41 | 3.02 | 8.94 | ||||
| Average | KPOD | Float | 5.90 | 4.40 | 3.66 | 8.22 | 92.9% | ↑ 16% |
| Fix | 4.74 | 3.85 | 3.25 | 6.92 | ||||
| GRACE-B | ||||||||
|---|---|---|---|---|---|---|---|---|
| Time | Method | Solution Type | RMS (cm) | Fixed Ratio | Precision Improvement of 3D-RMS | |||
| R | A | C | 3D-RMS | |||||
| 20170115 | RPOD | Float | 6.31 | 4.27 | 2.61 | 8.05 | 95.4% | ↑ 13% |
| Fix | 6.05 | 3.23 | 1.58 | 7.04 | ||||
| 20170116 | RPOD | Float | 5.21 | 3.76 | 2.96 | 7.07 | 91.1% | ↑ 9% |
| Fix | 4.65 | 3.51 | 2.79 | 6.46 | ||||
| 20170117 | RPOD | Float | 6.63 | 4.13 | 3.54 | 8.58 | 93.6% | ↑ 12% |
| Fix | 6.18 | 3.31 | 2.89 | 7.58 | ||||
| 20170118 | RPOD | Float | 6.27 | 3.61 | 2.32 | 7.60 | 96.1% | ↑ 16% |
| Fix | 4.57 | 3.52 | 2.71 | 6.37 | ||||
| 20170119 | RPOD | Float | 7.01 | 4.59 | 3.03 | 8.91 | 90.4% | ↑ 9% |
| Fix | 6.23 | 4.22 | 2.98 | 8.09 | ||||
| 20170120 | RPOD | Float | 4.43 | 3.62 | 3.82 | 6.88 | 92.4% | ↑ 12% |
| Fix | 3.79 | 3.51 | 3.19 | 6.07 | ||||
| 20170121 | RPOD | Float | 4.61 | 3.24 | 3.41 | 6.59 | 90.7% | ↑ 7% |
| Fix | 4.21 | 2.99 | 3.32 | 6.14 | ||||
| 20170122 | RPOD | Float | 4.73 | 3.35 | 3.05 | 6.55 | 93.1% | ↑ 11% |
| Fix | 4.16 | 3.10 | 2.65 | 5.83 | ||||
| 20170123 | RPOD | Float | 4.71 | 3.94 | 3.13 | 6.89 | 89.7% | ↑ 9% |
| Fix | 4.25 | 3.54 | 3.02 | 6.30 | ||||
| 20170124 | RPOD | Float | 4.05 | 3.17 | 4.15 | 6.61 | 93.8% | ↑ 13% |
| Fix | 3.43 | 2.95 | 3.56 | 5.76 | ||||
| Average | RPOD | Float | 5.40 | 3.77 | 3.20 | 7.32 | 92.6% | ↑ 11% |
| Fix | 4.75 | 3.39 | 2.87 | 6.50 | ||||
| GRACE-A | ||||||||
|---|---|---|---|---|---|---|---|---|
| Time | Method | Solution Type | RMS (cm) | Fixed Ratio | Precision Improvement of 3D-RMS | |||
| R | A | C | 3D-RMS | |||||
| 20170115 | RPOD | Float | 5.31 | 3.81 | 2.99 | 7.19 | 93.0% | ↑ 9% |
| Fix | 4.67 | 3.61 | 2.85 | 6.55 | ||||
| 20170116 | RPOD | Float | 6.93 | 4.32 | 3.41 | 8.85 | 94.3% | ↑ 13% |
| Fix | 6.24 | 3.31 | 3.06 | 7.70 | ||||
| 20170117 | RPOD | Float | 6.11 | 3.58 | 2.28 | 7.44 | 93.9% | ↑ 12% |
| Fix | 4.32 | 3.84 | 3.11 | 6.56 | ||||
| 20170118 | RPOD | Float | 4.17 | 4.01 | 3.18 | 6.60 | 91.6% | ↑ 11% |
| Fix | 3.61 | 3.55 | 3.02 | 5.90 | ||||
| 20170119 | RPOD | Float | 4.31 | 3.57 | 3.75 | 6.74 | 92.0% | ↑ 9% |
| Fix | 3.88 | 3.48 | 3.21 | 6.12 | ||||
| 20170120 | RPOD | Float | 4.79 | 3.35 | 3.41 | 6.77 | 95.1% | ↑ 8% |
| Fix | 4.32 | 2.94 | 3.43 | 6.25 | ||||
| 20170121 | RPOD | Float | 4.83 | 3.46 | 2.96 | 6.64 | 96.8% | ↑ 9% |
| Fix | 4.25 | 3.32 | 2.79 | 6.07 | ||||
| 20170122 | RPOD | Float | 4.71 | 3.94 | 3.13 | 6.89 | 94.5% | ↑ 7% |
| Fix | 4.3 | 3.62 | 3.05 | 6.40 | ||||
| 20170123 | RPOD | Float | 6.01 | 4.81 | 3.02 | 8.27 | 92.2% | ↑ 12% |
| Fix | 5.23 | 4.12 | 2.89 | 7.26 | ||||
| 20170124 | RPOD | Float | 4.32 | 4.21 | 3.26 | 6.86 | 94.9% | ↑ 13% |
| Fix | 3.61 | 3.64 | 3.03 | 5.96 | ||||
| Average | RPOD | Float | 5.15 | 3.91 | 3.14 | 7.18 | 93.8% | ↑ 10% |
| Fix | 4.44 | 3.54 | 3.04 | 6.45 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Li, Z.; Wang, N.; Hoque, M.; Wang, L.; Li, R.; Zhang, Y.; Yuan, H. Real-Time Precise Orbit Determination for LEO between Kinematic and Reduced-Dynamic with Ambiguity Resolution. Aerospace 2022, 9, 25. https://doi.org/10.3390/aerospace9010025
Wang Z, Li Z, Wang N, Hoque M, Wang L, Li R, Zhang Y, Yuan H. Real-Time Precise Orbit Determination for LEO between Kinematic and Reduced-Dynamic with Ambiguity Resolution. Aerospace. 2022; 9(1):25. https://doi.org/10.3390/aerospace9010025
Chicago/Turabian StyleWang, Zhiyu, Zishen Li, Ningbo Wang, Mainul Hoque, Liang Wang, Ran Li, Yang Zhang, and Hong Yuan. 2022. "Real-Time Precise Orbit Determination for LEO between Kinematic and Reduced-Dynamic with Ambiguity Resolution" Aerospace 9, no. 1: 25. https://doi.org/10.3390/aerospace9010025
APA StyleWang, Z., Li, Z., Wang, N., Hoque, M., Wang, L., Li, R., Zhang, Y., & Yuan, H. (2022). Real-Time Precise Orbit Determination for LEO between Kinematic and Reduced-Dynamic with Ambiguity Resolution. Aerospace, 9(1), 25. https://doi.org/10.3390/aerospace9010025