1. Introduction
With the increasing demand for energy and the depletion of non-renewable energy, the world is facing a serious energy crisis. As a kind of abundant clean and renewable energy, the rational utilization of solar energy is of great significance to solve the energy crisis and environmental problems. Solar power satellite (SPS) also called space power station or space solar power satellite (SSPS) first proposed by Glaser in 1968 [
1] is a class of large-scale on-orbit servicing spacecraft that can collect solar energy in space and transmit electrical energy in the form of microwave to the earth. A typical SPS consists of three main parts: the solar collector uses the solar arrays to receive the sunlight and convert the solar energy into electric energy, some SPSs are equipped with concentrators such as lenses or concave mirror to converge the sunlight; the conversion device converts the electric energy into microwave or laser; the antenna or laser transmitter transmits the microwave or laser to the ground, in which the rectenna of the receiving station receives the microwave or laser and converts it into electric energy which can be injected to power supply system.
Over the past couple of decades, the United States, Europe, Japan, and China have put forward a variety of construction schemes for SPSs. Since Glaser first proposed the idea of building a SPS in geostationary orbit (GEO), in 1970s, NASA continued to explore the feasibility and key technologies of SPS and proposed the 1979 SPS reference system [
2]. In 1990s, NASA successively proposed a series of SPS configurations, including Sun Tower, Solar Disc, Abacus and Integrated Symmetrical Concentrated system (ISC) [
3]. In 2011, John Mankins came up with the solar power satellite via arbitrarily large-phased array (SPS-ALPHA) [
4]. ESA put forward the Sail Tower SPS, which effectively reduced the system mass but could not achieve sustainable energy supply [
5]. JAXA began the study of SPS in 1990 and several configurations were given, for example, JAXA 2001, JAXA 2002, and Tethered SPS [
6], etc. Tethered SPS has smaller mass and can supply energy continuously. China has carried out research on SPS since 2015 based on two types of SPS concept: Multirotary-joint Solar Power satellite (MR-SPS) by CAST [
7] and Space Solar Power Station via Orb-shape Membrane Energy Gathering Array (SSPS-OMEGA) by Xidian University [
8].
The core task of a SPS is to collect as much solar energy as possible and transmit it to the ground accurately. To accomplish the above goal, attitude of an SPS is supposed to be adjusted so that the solar collector tracks the sun and at the same time, the antenna or laser transmitter points to the rectenna in the ground accurately. Due to its large mass and inertia, large torque is required for attitude control of a SPS, which means more actuators and fuel need to be carried and further increases the mass of the system. In order to reduce fuel consumption and mass, some research has been done. [
9] proposed a novel quasi-Sun-pointing attitude in Sun-frozen orbit. Although about 3% electricity must be given up, little control effort is required to deal with the solar radiation pressure and gravity-gradient torque. Refs. [
10,
11] developed an integrated orbit, attitude, and structural control system architecture for very large SSPS in GEO. A low-bandwidth attitude control system was proposed utilizing cyclic-disturbance accommodating control to provide precision pointing of the Abacus platform in the presence of dynamic modeling uncertainties and external disturbances. Moreover, the configuration of the actuators and the propellants required were also analyzed in detail. In [
12,
13], a detailed study of solar power satellites’ orbit dynamics was performed, and a direct comparison between the attitude dynamics of SPS in GLP orbit and in GEO was made. When both attitude and orbit control are considered, fuel consumption is less in GLP compared to in GEO.
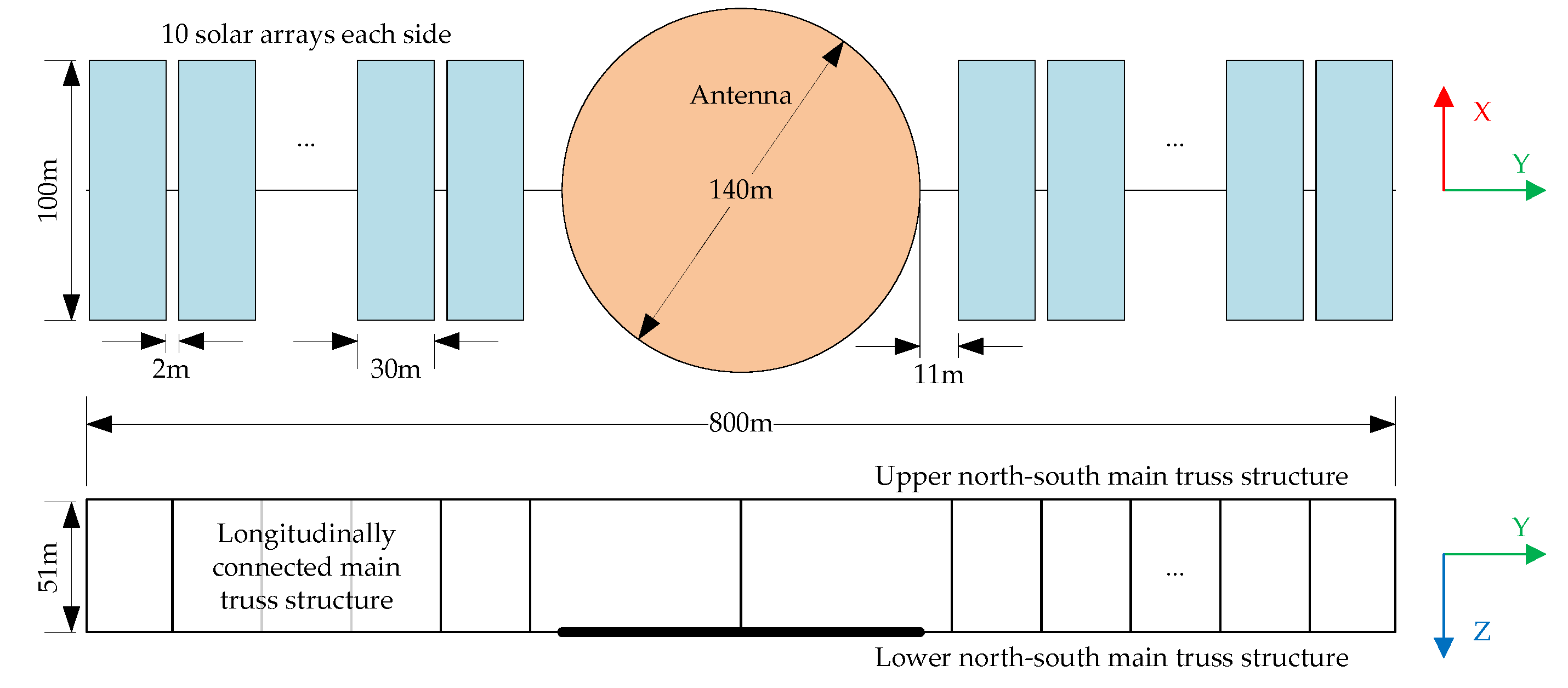
MR-SPS is an SPS scheme located in GEO proposed by CAST, which utilizes a number of mutually independent rotating solar arrays continuously oriented to the sun to receive solar energy and converts it into electric energy that is transmitted to the power transmission bus through a number of independent low-power conductive rotating joints. The transmission medium of the energy is microwave.
There was some research on the attitude of the MR-SPS. In [
14], the flexible multibody attitude dynamic model including external disturbances is derived, and a hybrid high/low bandwidth robust controller is proposed to achieve the attitude control of the SPS. Refs. [
15,
16] proposed a switched iterative learning controller (ILC) for a flexible SPS to periodically track the earth and the sun. The previous research established the dynamic model of MR-SPS based on analytical mechanics which need complicated derivatives with respect to generalized coordinates. The angular trajectory was not optimized which can cause quite large control torque.
In view of the dynamic characteristics of MR-SPS, if the microwave antenna is accurately oriented to the ground and the solar arrays are accurately oriented to the sun when the energy receiving efficiency is 100%, there will be a slew at some time around the vernal and autumnal equinox, which requires large control torques. However, subject to the total weight and degradation of the actuators, the torque generated by the actuators may fail to meet the orientation requirements. The previous attitude planning for SPS did not consider the constraints of dynamics. Aiming at this problem, an MR-SPS dynamic model was established. Using the method of Bezier shaping approach, the angular trajectory is optimized under the condition of limited control torque, which ensures the accurate earth orientation of the antenna and the quasi sun orientation of solar arrays as well as a high energy receiving efficiency. Simulation verifies the feasibility of the optimization method.
The rest of this paper is arranged as follows: In
Section 2, the model of MR-SPS is presented; the angular trajectory planning based on Bezier shaping approach is described in
Section 3; in
Section 4, the simulation results are given. The results are summarized in
Section 5.
3. Trajectory Planning for the MR-SPS Considering Dynamic Constraints
3.1. State Approximation Using Bezier Curve
In Bezier shaping approach, it is assumed in advance that the angular trajectory of the MR-SPS follows Bezier curve functions. The approximation of
γ and
θj can be expanded by applying Bezier curve functions. To avoid repetition, only the processing approach for
γ is given, and
θj can be processed in the same way. The approximation of
γ is expanded as follows:
where
is the scaled time, and
T is the flight time;
nγ is the order of the Bezier curve function.
are the Bezier coefficients;
are the Bezier basis functions given by:
The first and second
τ-derivative of
γ can be derived as follows:
where
and
are first and second τ-derivative of the Bezier basis functions that can be derived according to Equation (20) as:
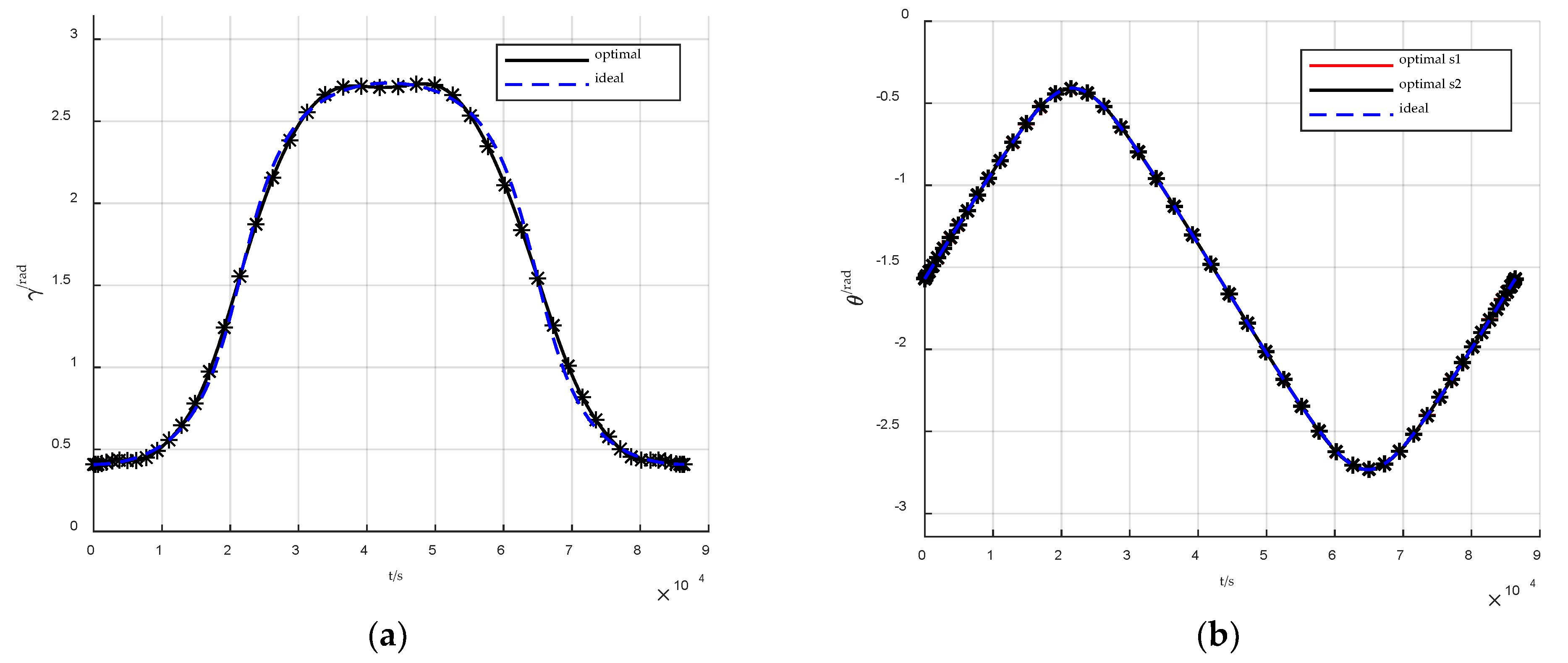
The start time is selected as when the right ascension between the sun and the SPS is about 90° because the value of
γ is equal to the inclination of the sun at equatorial plane and
is equal to 0. After a solar day (86400s) instead of the orbital period considering the movement of the sun,
γ and
are almost equal to the ones at start time. So,
T is chosen as a solar day. To ensure the convergence, the following boundary conditions are required to be satisfied:
where
denotes the derivative of
x with respect to time
t;
denotes the derivative of
x with respect to scaled time
τ.
γ0,
γf,
, and
can be calculated according to Equations (1)–(4) so that the approximation of
γ is continuous after a solar day.
Substituting
and
into Equations (20)–(22) and (26), four Bezier coefficients
,
,
, and
can be determined as follows:
In order to meet the dynamic constraints at every moment, some discrete points can be adopted to calculate the dynamic constraints. The discrete points can be obtained by applying Gaussian Legendre distribution, which is defined as the roots of
m-order Legendre polynomial to be scaled to
and to be arranged in ascending order as follows:
. The discrete points of
γ and its first and second
τ –derivatives can be given in compact matrix notation form as follows:
where
is the Bezier coefficient column matrix and
is the unknown coefficient column matrix to be optimized.
,
, and
are Bezier basis function matrix and the first and second
τ-derivative matrices of the Bezier basis function which can be calculated by substituting
into Equations (21), (24) and (25).
Once the order of Bezier curve and the number of discrete points are determined, , , and are determined, only calculated once and stored. In the process of optimization, they can be used in every iteration without repeated calculation, which reduce the calculation burden of the computer.
3.2. Description of the Optimization Problem
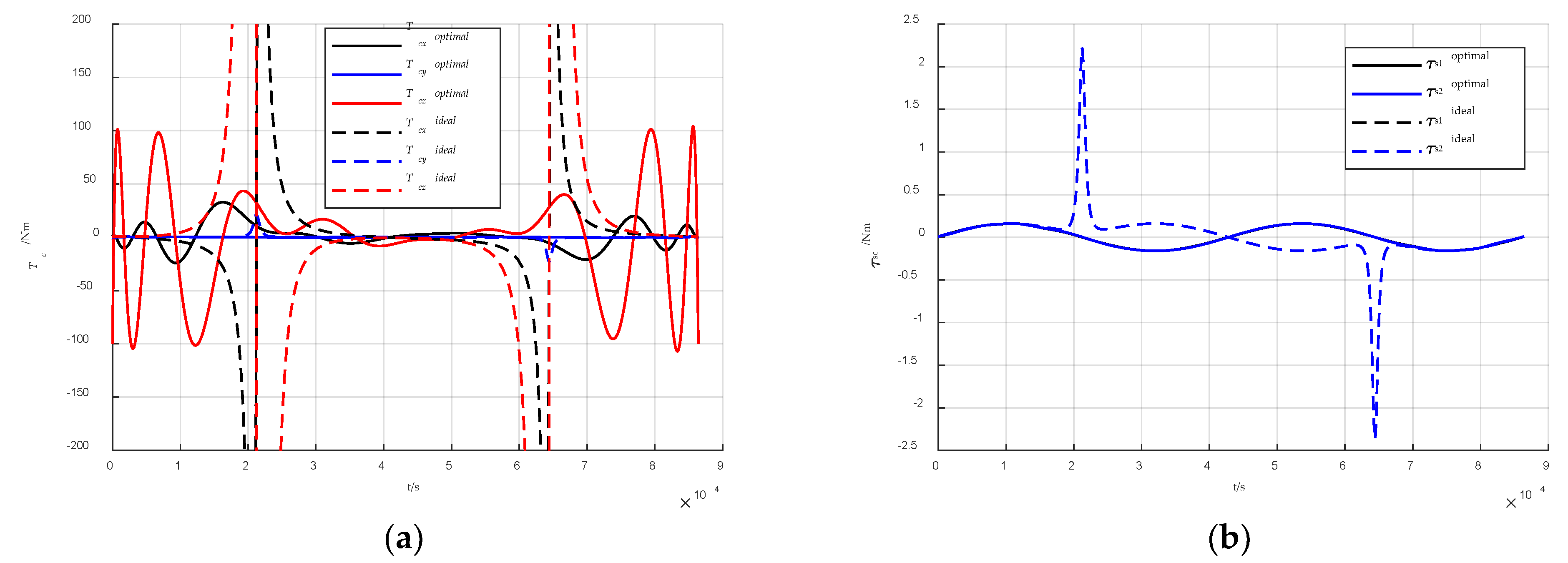
As a large-scale spacecraft, the MR-SPS requires large torque in the attitude tracking process. During a short period of time around the time of the equinox, if the arrays strictly point to the sun at any moment, there will be a large angle of ration in a short time for the main structure when the right ascension between the sun and the SPS is about 0° or 180°, resulting in large control effort. From the perspective of economic benefits, the large-scale spacecraft needs to limit the mass. The larger the maximum control torque is, the heavier the actuators are which leads to an increase in the mass of actuators as well as the launch cost. Moreover, supposing that the actuators fail, the maximum output torque decreased, which causes degradation of the output of the actuator. Therefore, there is a need to plan the angular trajectory when the control torque is limited.
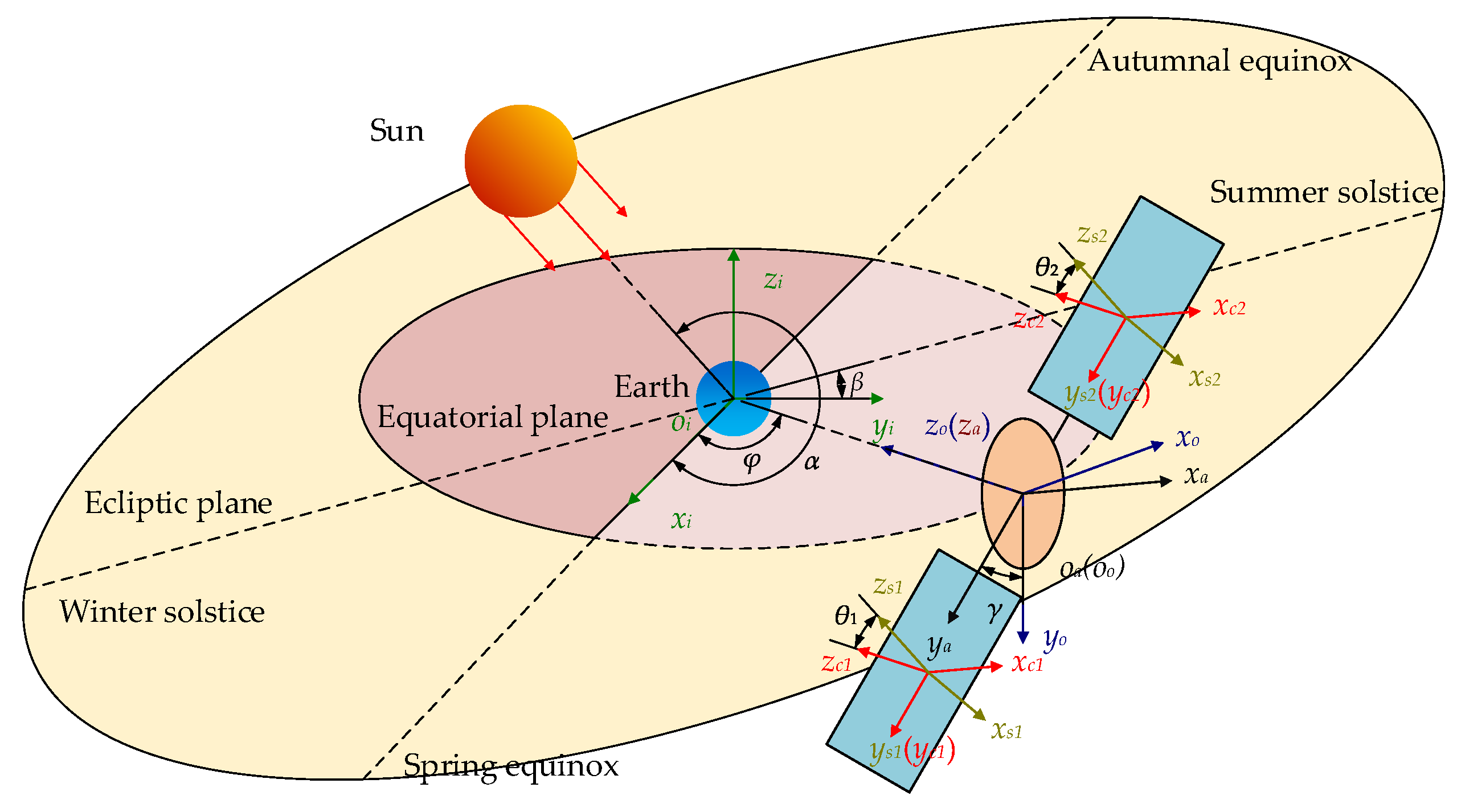
From the geometric relationship shown in
Figure 2, after rotating −
π/2 around
x-axis and −
φ −
π/2 around
y-axis, the inertial frame is parallel to the orbital frame. The orbit frame is parallel to the main structure frame after it rotates
γ around
z-axis. The
jth intermediate frame is parallel to the
jth array frame after rotating
θj around
y-axis. The rotation matrix from the inertial frame to the
jth array frame can be written as:
One rotation can be expressed by a unit quaternion
, where
and
are the scalar and vector part of the unit quaternion respectively. The rotation of the main structure frame relative to the inertial frame can be expressed as:
The first and second derivatives can be expressed as:
The attitude kinematics equation of the main structure can be expressed as follows:
where
, and it is easy to find that
where
E3 is the identity matrix. So
ωa and
can be expressed as:
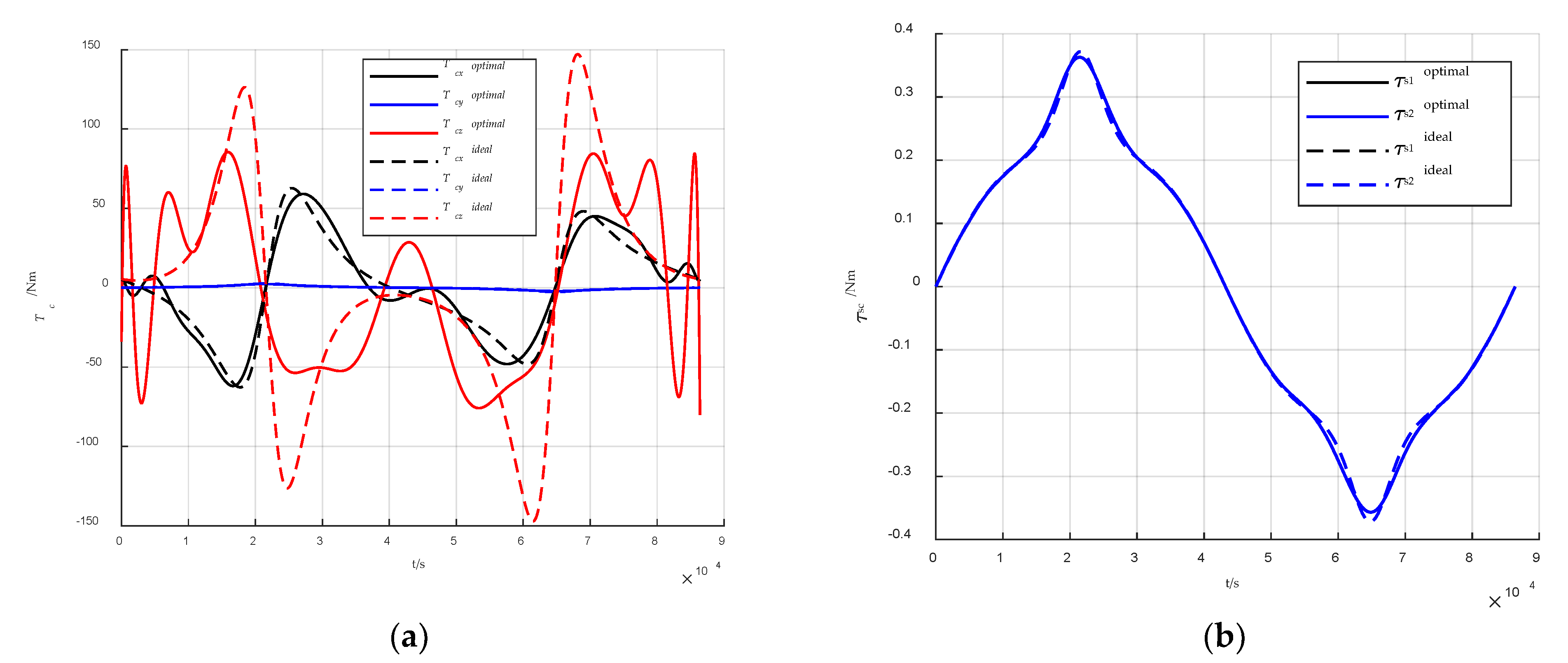
Substituting Equations (28)–(34), (36) and (37) into Equations (16) and (17), the compact matrix notation form of
Tc and
τscj can be written as
and
. Compared with
Tc, the value of
τscj is much smaller, so only the value of
Tc is constrained. Considering that the maximum torque of
Tc is
and the minimum torque of
Tc is
, 6
m inequality constraints are obtained as follows:
where
is a matrix with all the elements equal to 1.
denotes the Kronecker product operator.
In theory, if the integrated attitude energy control system [
18] is employed for the MR-SPS, the process of generating the control torque does not consume any energy. Continuous and efficient energy supply is the main task, so the energy receiving efficiency is selected as the performance index. The cosine of the angle between the normal vector of the array and the vector of the sun can measure the energy receiving efficiency. The following equation can calculate the average energy receiving efficiency in a solar day for one array:
By calculation at the discretization points, the continuous angular trajectory optimization problem for the MR-SPS can be converted into the following small-scale nonlinear programming problem:
and are the unknown Bezier coefficients, a total of variables need to be optimized.
3.3. Initial Value Selection
The selection of the initial value of the variables has a great impact on the result of the optimization. The initial value close to the optimal solution can avoid local optimization and improve the operation speed.
Section 2.2 has given the ideal angular trajectory, namely the analytical angular trajectory without dynamic constraints which can be used as a reference for the selection of initial value. At most time, by calculating ideal
γ and
θj at discrete time, the compact matrix notation forms
and
are obtained. The initial values
and
can be calculated by solving the following equation to get the least square solution:
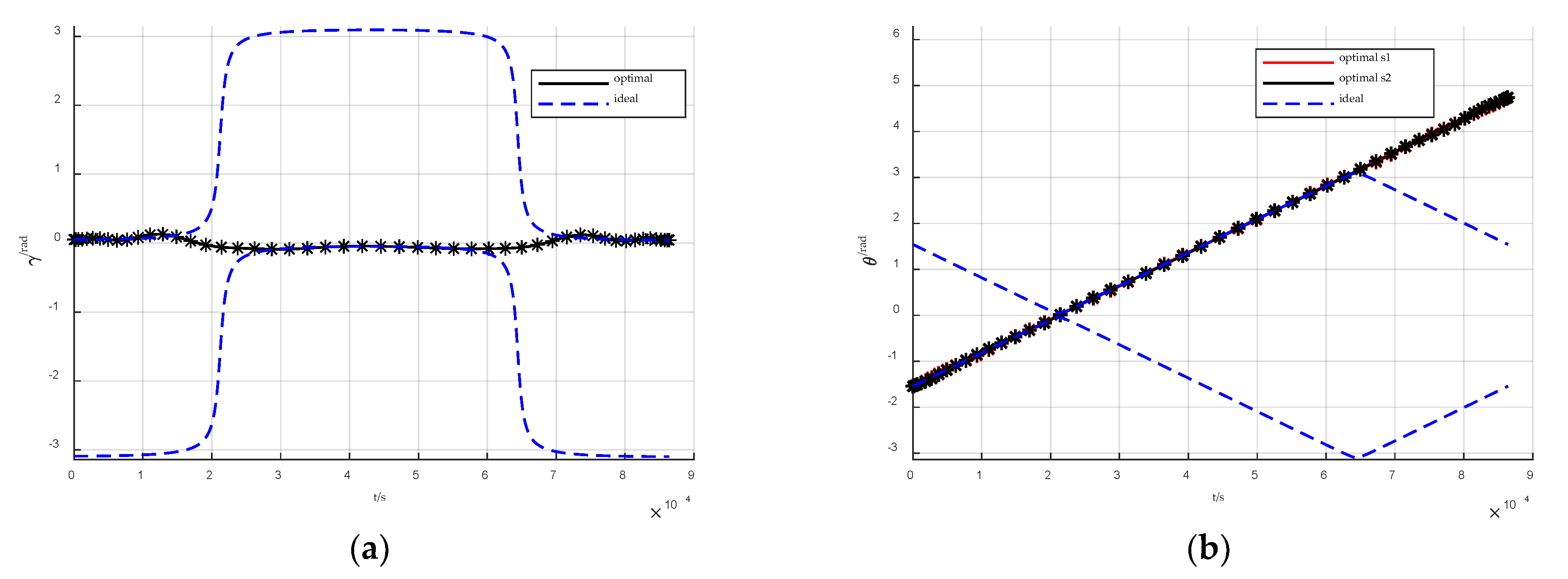
However, around equinox, the rate of change of the ideal angular trajectory is large when the right ascension between the sun and the SPS is about 0° or 180°, so the inversely calculated initial value violates the dynamic constraints a lot. Nevertheless, at this moment, the altitude angle of the sun is small, and quite high energy receiving efficiency is guaranteed as long as the ya-axis is perpendicular to the orbital plane. and are given by: and . By solving Equations (41) and (42), the initial value and can be acquired.
By solving the optimization using two sets of initial value, the better result is selected as the optimal solution. The following criterion can help choose the initial value:
where
σ represents the smoothness of the curve.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}