
Implementation and Real-Time Validation of a European Remain Well Clear Function for Unmanned Vehicles

 ,
,  , and
, and
Abstract
:1. Introduction
- Verify that the RWC system provides the remote pilot with alert indications well in advance with respect to the violation of the Well Clear volume (i.e., that allows for the RP to react and interact with ATC, if needed) during peer-to-peer encounters with both cooperative and non-cooperative intruders in controlled and uncontrolled airspace classes.
- Verify that the RWC system provides the Remote Pilot with alert and guidance indications that do not trigger the collision avoidance system onboard the intruder.
- Assess the interoperability of the proposed RWC function with the separation service provided by the controllers in the airspace classes D-E in order to avoid any overlap.
- Assess all actors’ acceptances of the new concept and the changes it brings to the current operational rules.
2. Background
- The traffic advisories (TAs): intended to increase the pilot’s situational awareness by assisting her/him in a visual search for a proximate aircraft that may become a collision threat. A TA is dependent on the geometry of the encounter and the aircraft’s altitude (i.e., sensitivity level) and belongs to the separation management layer.
- The resolution advisories (RAs): issued when a collision risk requires urgent action to be avoided. Execution of the RA is performed by the pilot and it does not require an ATCo clearance. An RA is dependent on the geometry of the encounter, relative speeds, and the aircraft’s altitude.
3. Requirements of the Remain Well Clear System
- Requirements directly usable;
- Requirements usable but with a change in the quantification;
- Differences in underlying assumptions having implications on function and/or quantification;
- Gaps with respect to the ED-258 applicable requirements and URClearED objectives.
- The definition and quantification of the volume of airspace around the own RPA that needs to be protected (the RWC volume). This may depend on the performance of both the own RPA and the intruder.
- The alerts that have to be provided in case it is predicted that the RWC volume will be violated.
- The guidance that has to be provided to support the pilot in making a maneuvering decision that is intended to avoid the LoWC.
- The interoperability with the separation management layer handled by the ATCo (i.e., avoid time overlapping between RWC alerts and the ATCo separation service).
- The minimization of resolution advisory (RA) activation in encounters with ACAS equipped aircraft before, during, and after an RWC maneuver.
- Ensuring compatibility of the RWC guidance in case an RA is issued by the intruder.
- The need to deal with both cooperative and non-cooperative traffic.
4. RWC Concept for Airspaces D to G
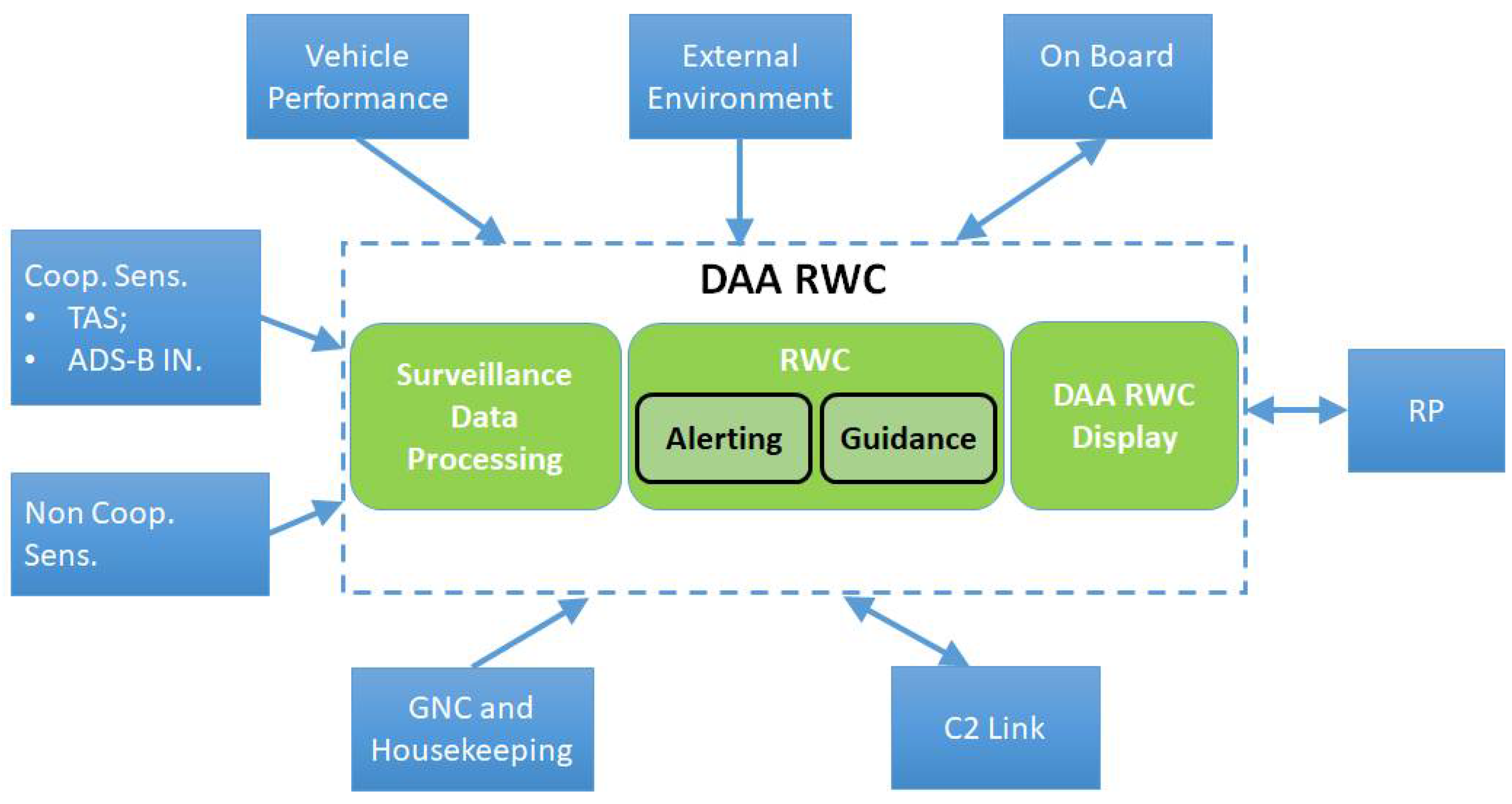
4.1. Operational Concept
- A suite of both cooperative and non-cooperative sensors. These sensors supply air traffic measurements in terms of intruders’ position and velocity, with their respective accuracies, and information about the intruders’ status. Specifically, a Mode-S transponder, coupled with an active surveillance transponder (TAS), constitutes the cooperative sensor suite, while the radar constitutes the non-cooperative sensor. Non-cooperative sensors are required explicitly in airspace classes D–G because, other than in classes A to C, it is possible to encounter intruders not equipped with transponders.
- The Guidance, Navigation, and Control (GNC) system that provides the overall state information of the own RPA.
- The Collision Avoidance (CA) function that sends to the RWC function direct information regarding the activation of any associated traffic or resolution advisory. This information is needed by the RWC system to avoid visualizing misleading or contradictory indications with respect to the CA system.
- The Command and Control link (C2L), through which the DAA RWC system interchanges relevant data between the RPAS airborne and ground segment, e.g., intruder traffic tracks, alerts, status data, commands, etc.
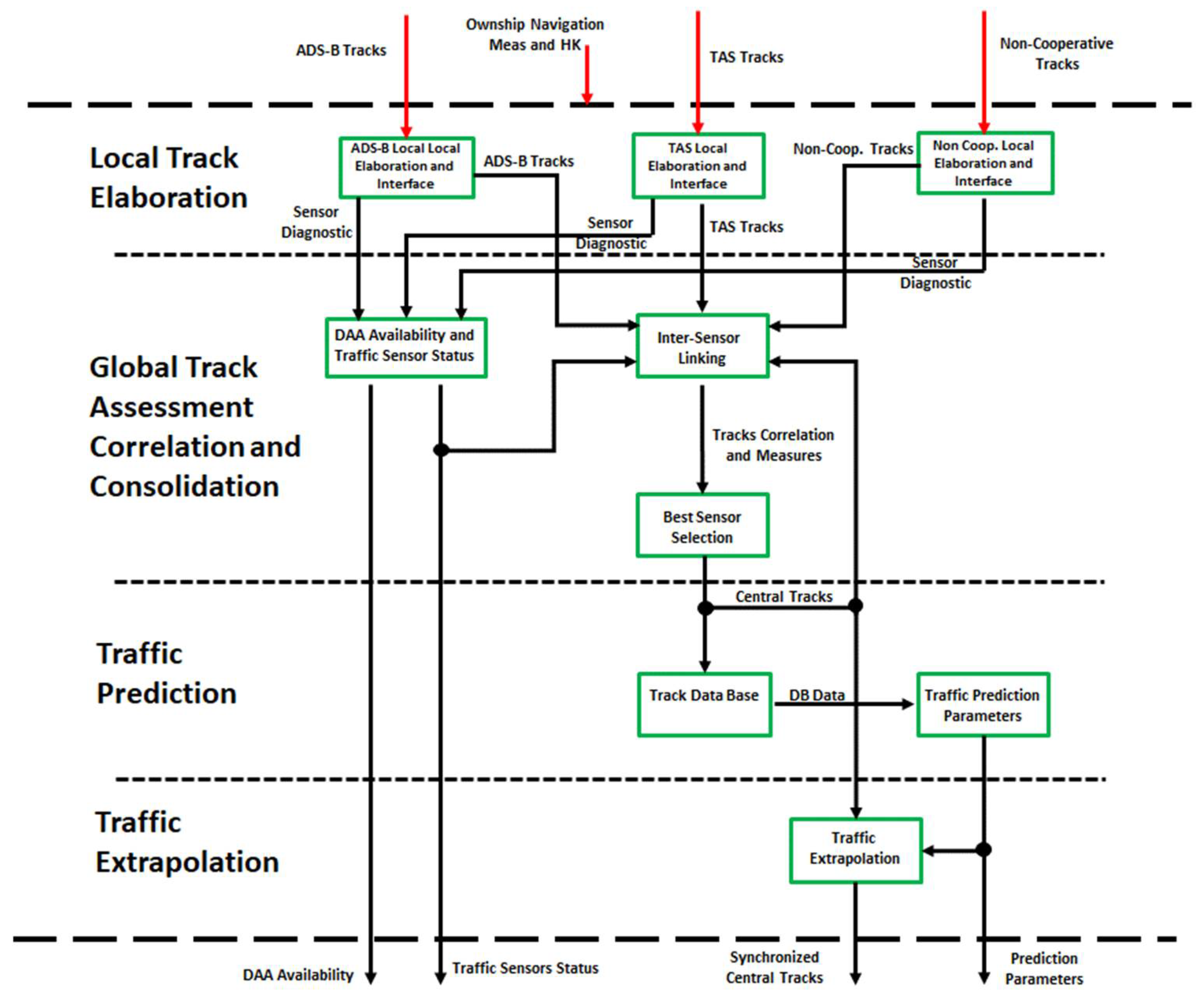
4.1.1. Surveillance Data Processing Function
4.1.2. RWC Functions: Alerting and Guidance
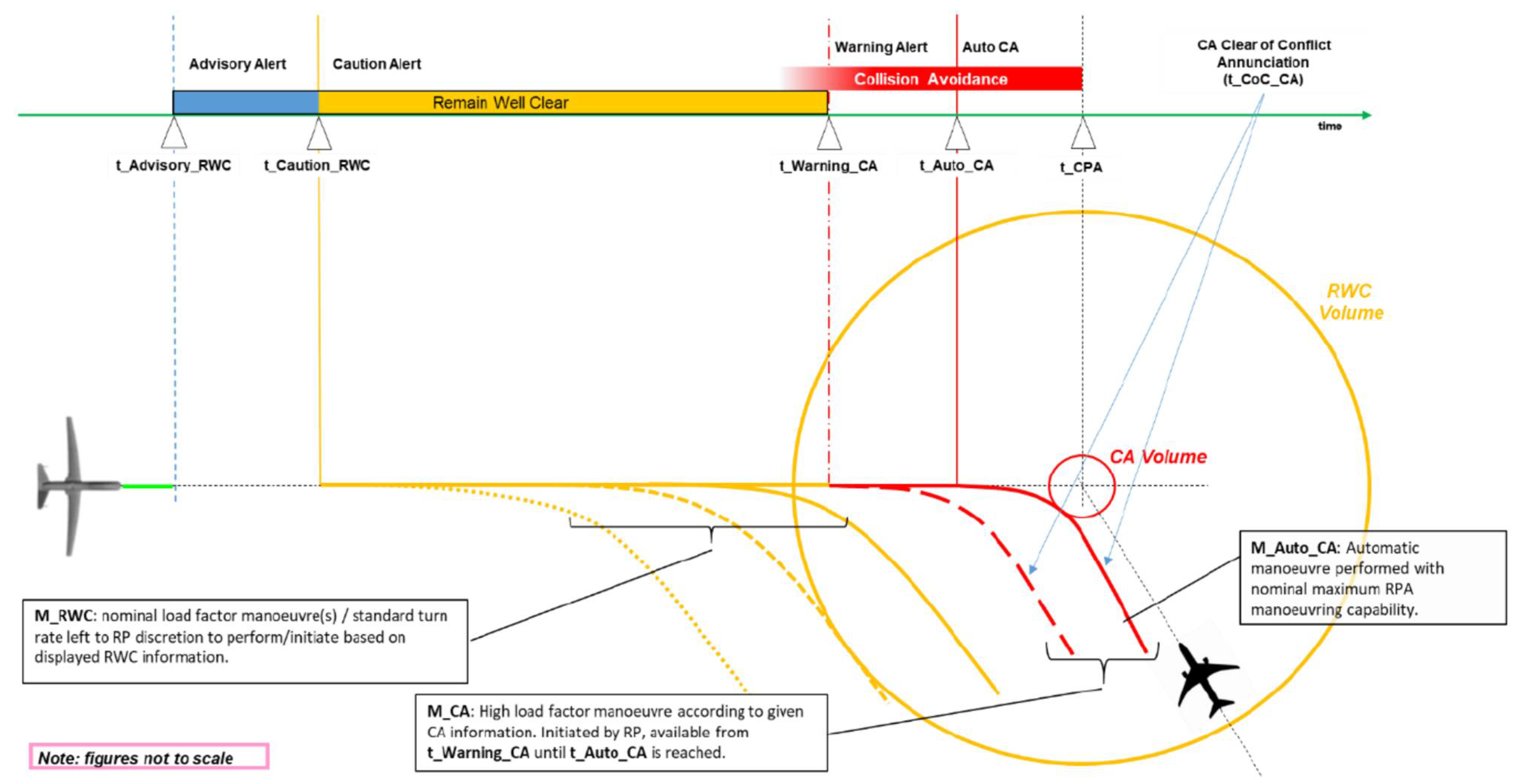
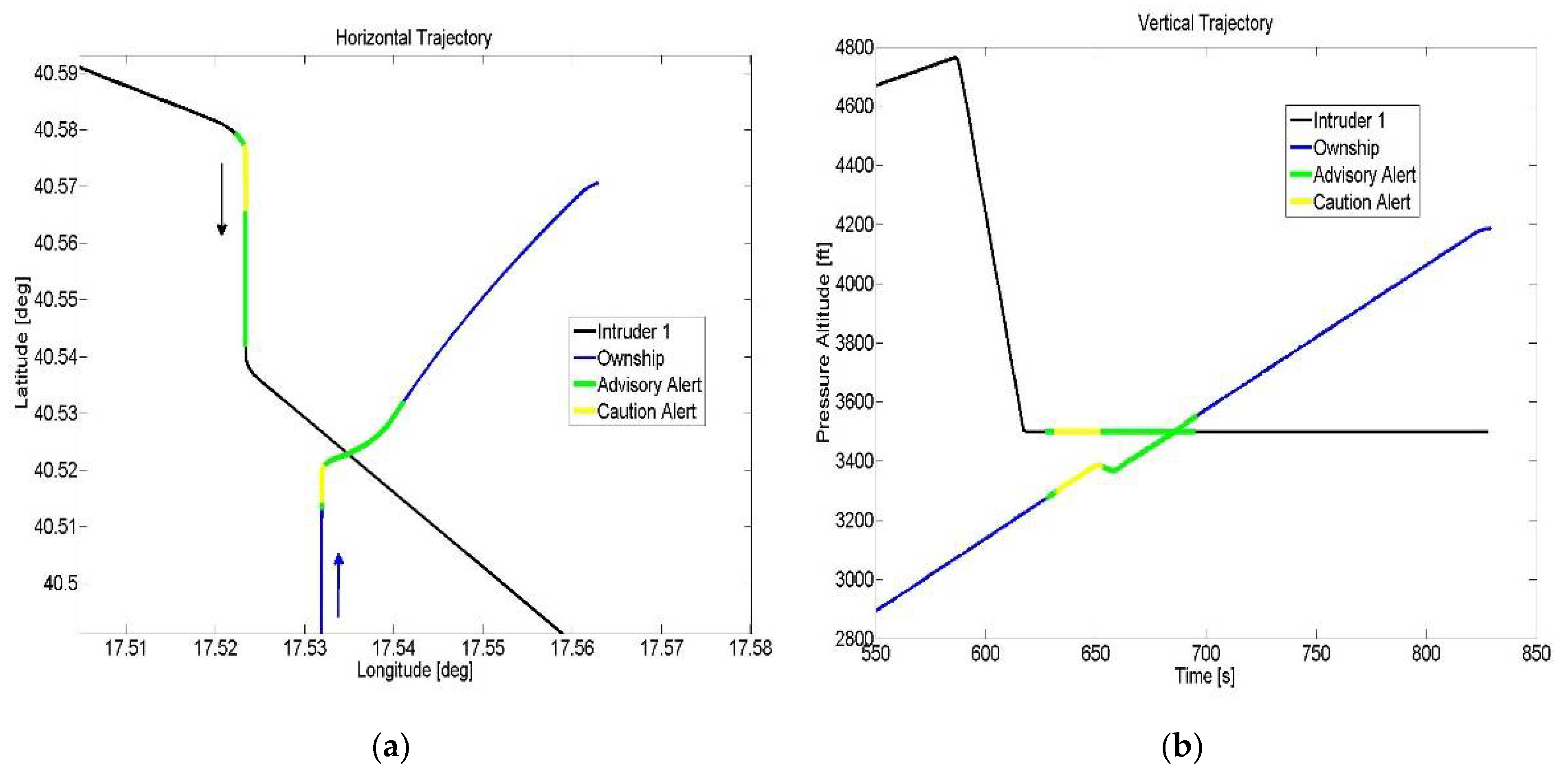
- The advisory alert, indicating when a change in current heading/track or altitude by the own RPA may immediately trigger a caution alert. The RP response to an advisory level alert is to monitor the designated traffic by assessing the overall situation of the encounter and to be aware of the risk of inducing a Loss of Well Clear situation, due to possible future maneuvers or mission constraints. Contacting ATCo in response to an advisory alert should be avoided.
- The caution alert, indicating a predicted or current Loss of Well Clear situation. This alert aims to get the attention of the RP for determining whether a Remain or Regain Well Clear maneuver is needed and to initiate coordination with ATCo if required. The alert necessitates immediate awareness of the RP and subsequent actions.
- Assess the overall situation of the encounter by assessing whether the intruder is flying under IFR or VFR, whether the intruder has the right of way, whether it is ACAS equipped or not, etc.
- Coordinate changes in the assigned clearance with the ATCo and execute the Remain Well Clear maneuver considering any associated communication delay, if needed.
- ACAS equipped or unequipped aircraft, using different thresholds as the function of the operating altitude (i.e., as done by the TCAS-II algorithm).
- Cooperative and non-cooperative traffic (i.e., transponder-equipped or not-equipped aircraft).
- The altitude levels.
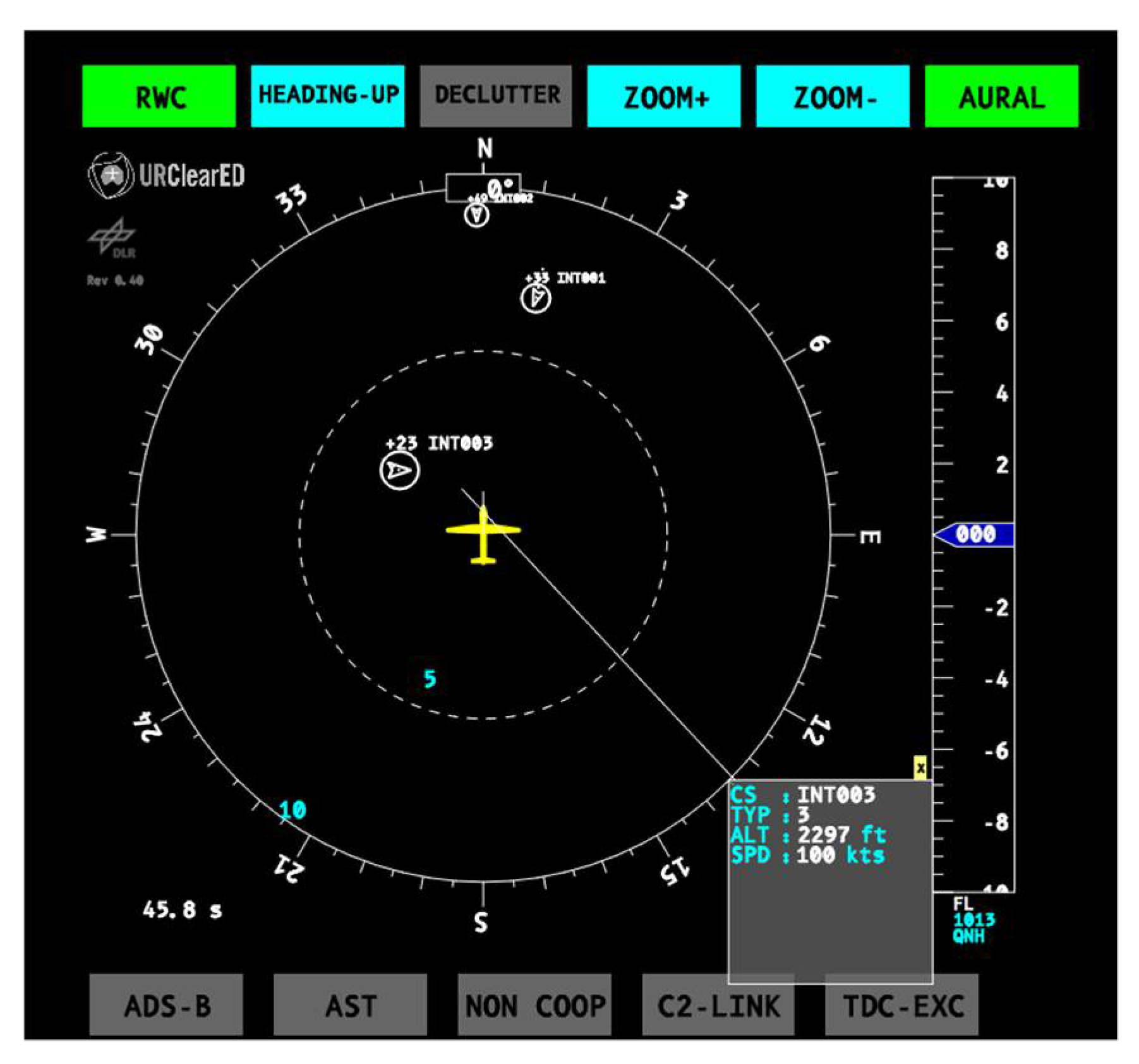
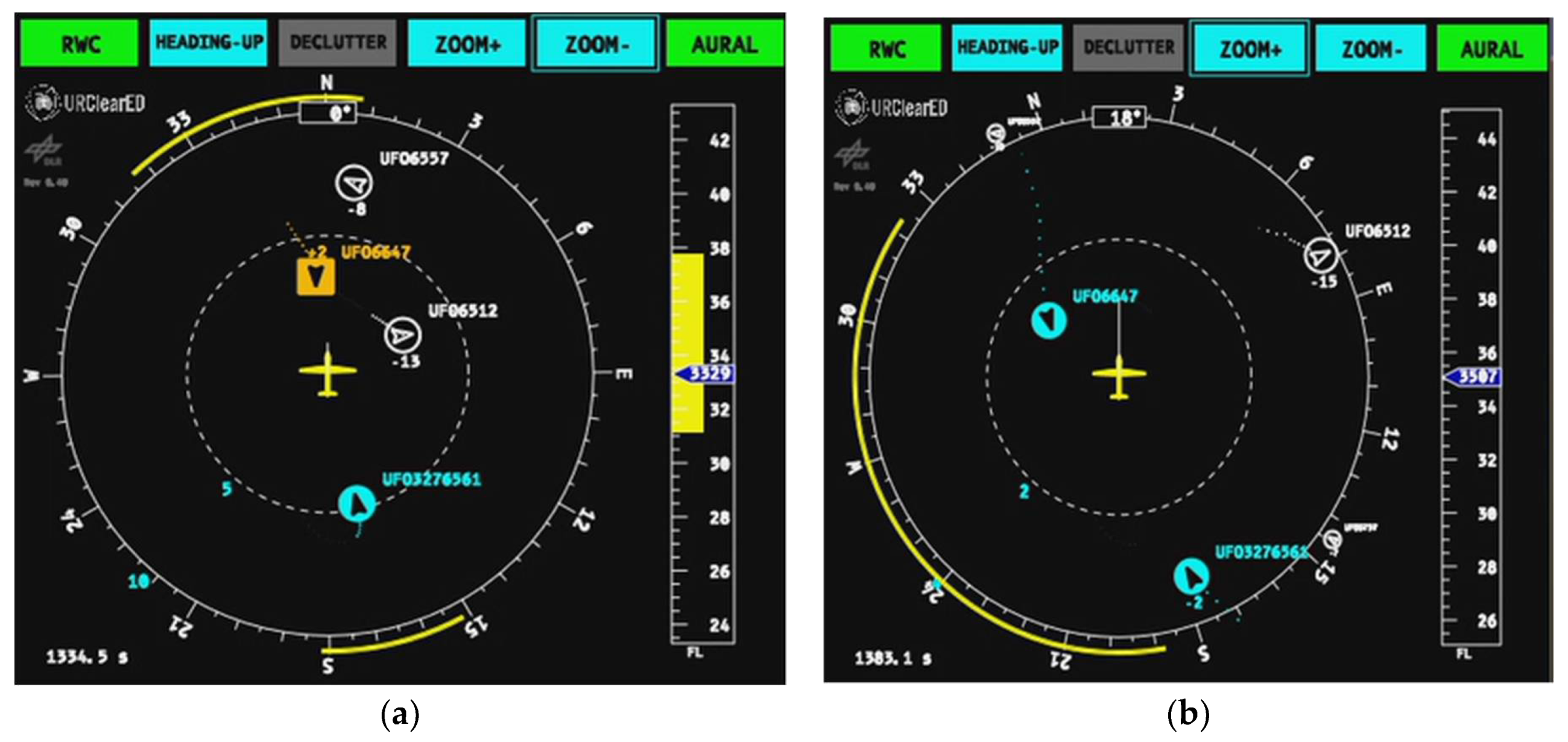
4.1.3. RWC Display Function
- A horizontal view of the surrounding traffic in which each aircraft is displayed by a symbol that depends on the associated active alert using a unique color code to show alerts.
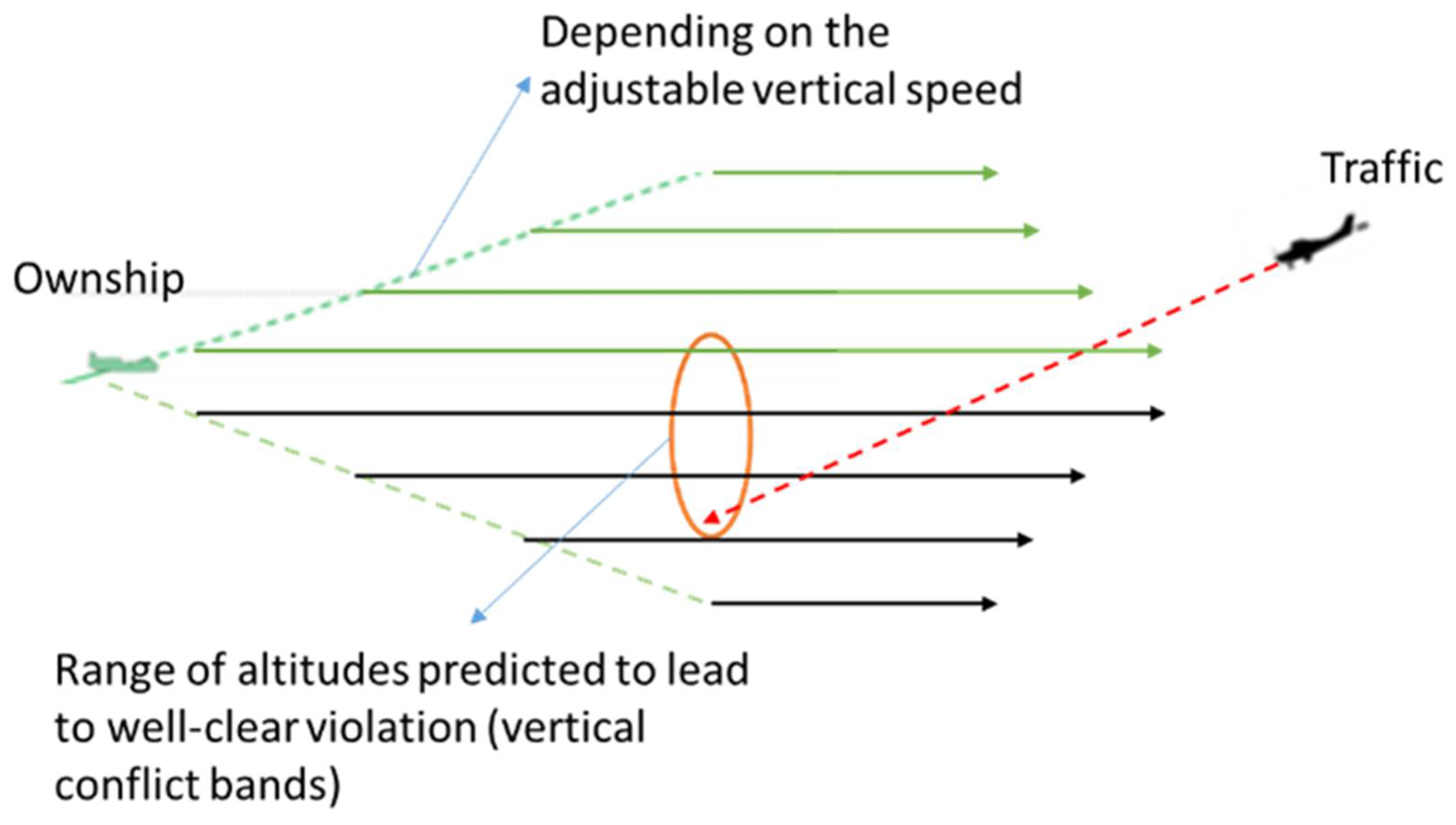
- The horizontal and the vertical conflict bands as computed by the guidance function.
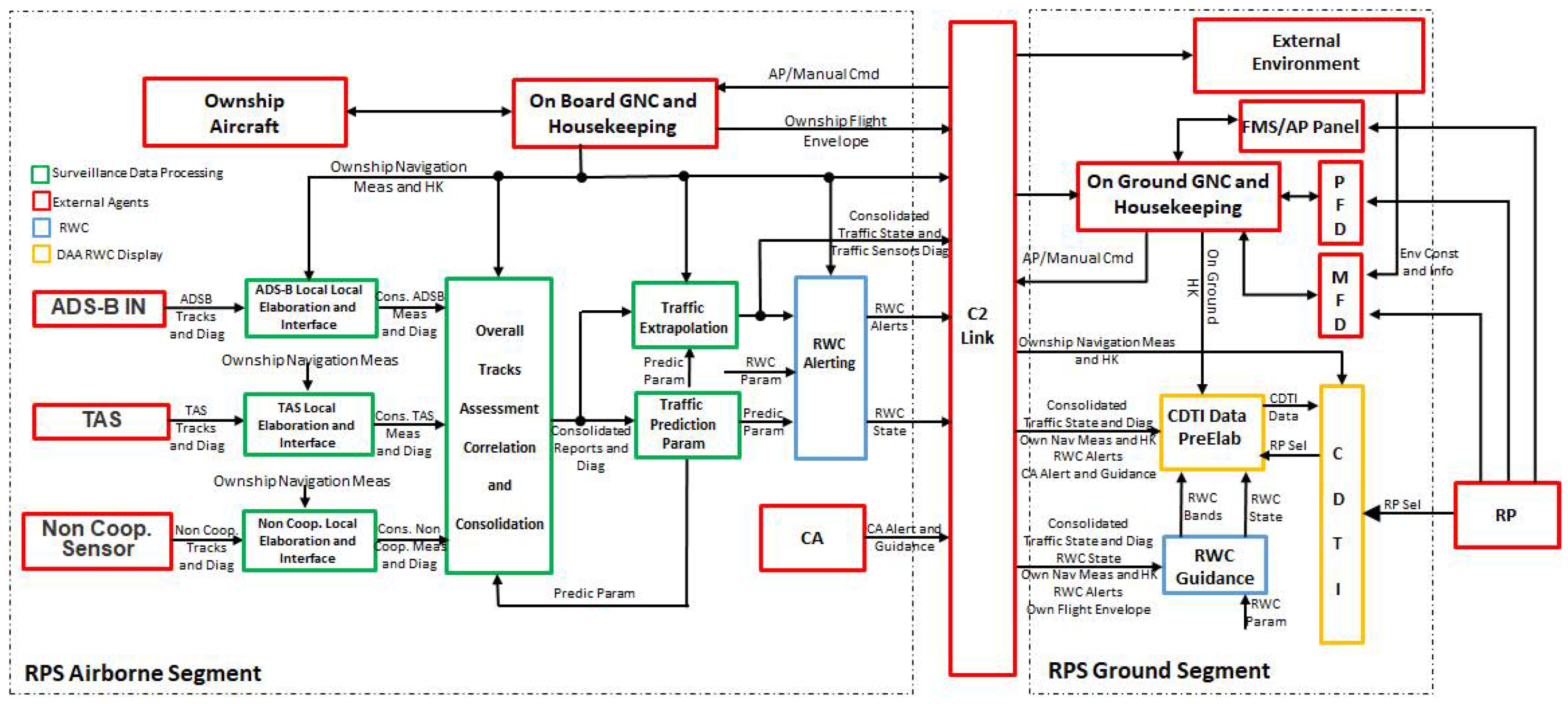
4.2. DAA RWC Functional Architecture
- ADS-B IN: implements the ADS-B IN sensor outputting the detected surrounding traffic in the extended squitter message format.
- TAS: implements the active traffic sensor outputting the detected surrounding traffic in a proper format. Such a sensor allows the RPAS to know whether an intruder is ACAS equipped or not, supporting the interoperability in case of resolution advisories (RAs).
- Non-Cooperative Sensor: implements a generic non-cooperative sensor capable of replicating the performance of a radar and/or EO/IR sensor.
- Onboard GNC and Housekeeping: represents the guidance, navigation, and control functionalities of the RPA. It inputs to the DAA RWC system a consolidated state of the own RPA aircraft (position, velocity, attitude, and time of applicability) and measurement accuracies, together with the housekeeping variables related to the own RPA sensors, actuators, and wind information. It also executes the maneuvers selected/made on-ground by the RP. The aircraft flight performance values, eventually updated online, are output.
- CA: The collision avoidance functionality of the RPAS that interacts with the CDTI and the onboard GNC in order to visualize the collision avoidance alerting and guidance indications and to execute automatic collision avoidance maneuvers, respectively. This functionality is out of scope with respect to the present work.
- C2 Link: A link for the exchange of data between the airborne and the ground RPS segments. It introduces a variable delay in the communication due to the radio line-of-sight or the beyond radio-line-of-sight conditions. A temporary or complete loss of communication can occur.
- On-Ground GNC and Housekeeping: Implements the on-ground flight management system (FMS) and AP panel logics through which the RP commands the RPA to execute a maneuver (e.g., an RWC maneuver) or a specific flight plan. It also manages the housekeeping of the on-ground systems, detecting, for example, the state of the C2L (i.e., working/not working).
- External Environment: Assesses the environment in which the own RPA is flying, namely: the weather hazards, the terrain, the surrounding no-fly zones, and obstacles. Such information is displayed on the on-ground HMI in order to further increase the RP situational awareness.
- PFD: The primary flight display located in the RPS shows to the RP information about the own RPA current altitude, vertical speed, IAS, attitude, etc. It helps the RP to evaluate the current own RPA state and flight condition.
- MFD: The multifunctional display located in the RPS gives to the RP information about the weather conditions, terrain, fixed obstacles, NavAids, no-fly zones, and aeronautical charts in the area of interest. It helps to increase the RP’s situational awareness.
- FMS/AP Panel: The RP can interact with the onboard FMS and AP through the related panels located in the RPS. Such panels allow the RP to execute maneuvers in an automatic mode, add/remove/modify waypoints to the current flight plan, or add/remove/modify flight plans.
- RP: The RP directly interacts with:
- ○
- The CDTI in order to change the display view (e.g., horizontal range of visualization) or to activate/deactivate DAA RWC functionalities.
- ○
- The PFD and MFD to increase his/her situational awareness with respect to surrounding obstacles, weather conditions, and terrain, if such information is not fully or partially displayed on the CDTI.
- ○
- The FMS/AP Panel to execute RWC maneuvers.
- ○
- Inceptors to manually execute a maneuver.
- The Surveillance Data Processing functionality is deployed on the RPAS airborne segment supporting the CA functionality and avoiding communication issues (i.e., delay in sending sensor measures to onboard through the C2L).
- The Surveillance Data Processing, uses a track-to-track fusing algorithm characterized by a hierarchical structure:
- ○
- A sensor-level tracking.
- ○
- A track-level fusion for the multiple sensor system in order to generate central tracks (i.e., single consolidated track report for each detected intruder).
- The sensor-level tracking algorithm that processes the sensor measurements to estimate the intruder’s position and velocity with related accuracy is integrated into the traffic sensor model as it is outside the scope of this paper.
- The Traffic Extrapolation module performs only linear trajectory extrapolation.
- The RWC Guidance function is hosted in the RPAS ground segment. The underlying rationale is that no RWC automatic maneuver is foreseen. For future integration with on-ground systems (e.g., geofencing, geocaging, weather stations, aeronautical database, etc.) this choice avoids additional communications and computational issues.
- The RWC Alerting function is hosted on the RPS airborne segment. This supports (future) integration with the collision avoidance functionality (e.g., filtering the most dangerous threat) and integration with the FMS (e.g., taking advantage of the own RPA intent information for the RWC alert issuing).
4.3. Surveillance Data Processing
- Evaluate the track accuracies in order to discard non-significant information. The thresholds with respect to evaluate the described conditions are parameters of the modules.
- Check report completeness and tag the tracks that are without altitude or bearing information.
- Manage a local database in which the tracks that are older than the current time of own RPA are discarded. The stored ADS-B, non-cooperative, and TAS tracks are terminated after 10 s, 4 s, and 10 s, respectively, as indicated in DO-365A.
- Output the intruder’s information in a standard data format in order to make all the other modules of the DAA system independent from the traffic sensor devices onboard. This means that a change of a traffic sensor device requires only a modification of the related surveillance local elaboration module.
- Output the diagnostic of the related traffic sensor in terms of its availability onboard (i.e., in the implementation the possibility has been foreseen that the RPAS can suffer from reduced equipment performance) and current state (i.e., sensor properly working or in failure).
- North, east, and vertical position difference.
- Lateral position difference.
- Range, bearing, and elevation difference.
- Track horizontal velocity; evaluated as the last available intruder horizontal velocity.
- Track chi last; evaluated as the average of the available target track angle (maximum five track angle values) if the absolute value of the estimated turn rate parameter is lower than a turn rate threshold, otherwise it is evaluated as the last available target track angle.
- Track vertical velocity; evaluated using a simple linear regression method.
4.4. RWC
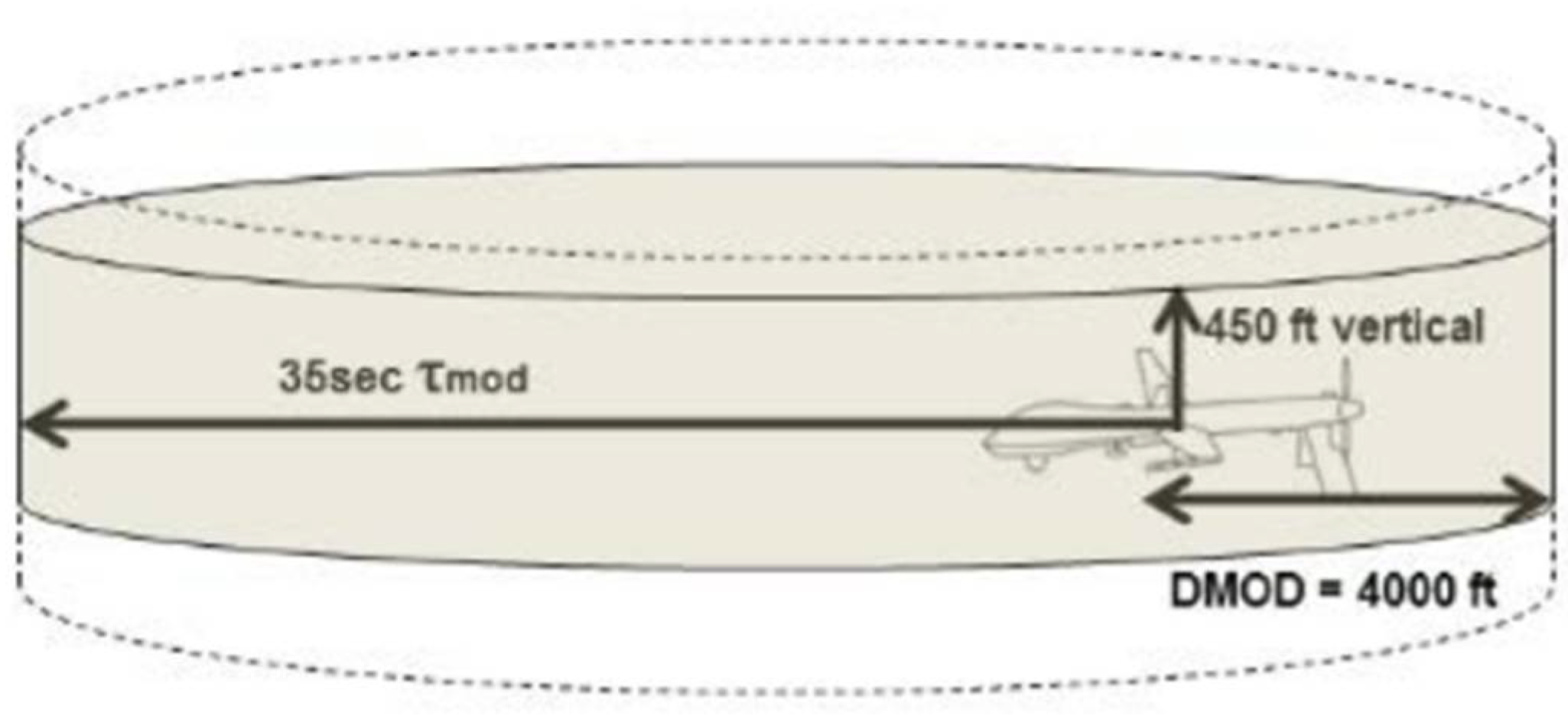
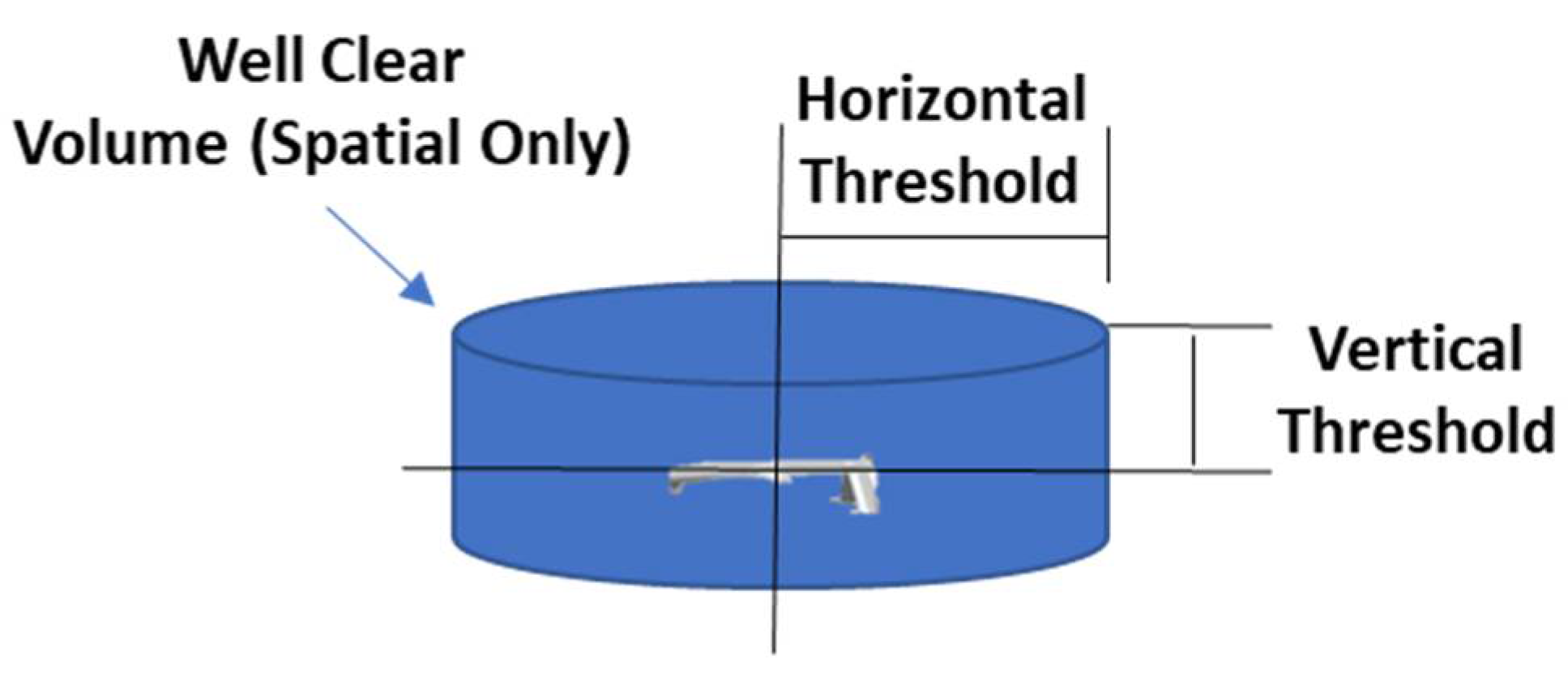
4.4.1. Quantification of RWC Volume
- A safety performance requirement is associated with the WCV, e.g., the maximum probability of an NMAC after an unmitigated excursion into WCV, or similar.
- The WCV uses a Horizontal Spatial Threshold (HST) to guarantee a minimum horizontal separation in any direction.
- The WCV can use a Horizontal Temporal Threshold (HTT) to yield a guaranteed minimum time between Loss of Well Clear and potential breach of the NMAC boundary.
- The WCV uses a Vertical Spatial Threshold (VST) to guarantee a minimum vertical separation.
- Selection of one of the possible WCV quantifications from available standards and projects that have already performed some analysis.
- Definition of the performance of the host vehicle. These performances are chosen among two classes of vehicles: one with relatively low maneuverability and a second one with higher maneuverability. The performance of these two vehicles’ classes is reported in Table 1.
- 3.
- Selection of the encounter altitude. Altitude has little effect on an encounter, given the assumptions we used in the tool. Therefore, it is only considered that a difference is established between the range of altitudes below 10,000 ft (where there is a limitation of speed up to 250 knt) and above 10,000 ft (where no speed limitation applies).
- 4.
- Selection of the type and velocity of the intruder.
- 5.
- Execution of the Monte Carlo analysis in which generic encounters are uniformly generated using the following intervals of values:
- ○
- Horizontal Miss Distance [0 … 500] ft, any angle;
- ○
- Vertical Miss Distance [−100 … 100] ft;
- ○
- RPAS speed [50 … 100] knts (TUAV/RUAV) and [70 … 200] knts for MALE;
- ○
- Direct Angle [−110 … 0] Non-Coop. intruders, [−180 … 0] Coop. intruders;
- ○
- RPAS Flight Path [−3 … +3] deg;
- ○
- Intruder Flight Path [−3 … +3] deg.
- 6.
- Evaluation of the results through the following criteria:
- ○
- Time difference between the Caution alert time and the RWC last possible maneuver greater than the latency of the RP/ATCo interaction and C2L;
- ○
- Time difference between the RWC last maneuver and resolution advisory alert greater than zero;
- ○
- Range of Caution alert below the surveillance sensor ranges;
- ○
- Time at Caution alert below the ATCo acceptable time for cooperative intruders in order to avoid overlapping between RWC and ATCo;
- ○
- Range of Caution alert below the visual range of non-cooperative intruders in order to allow an intruder that has only Visual Based Separation to see own RPA.
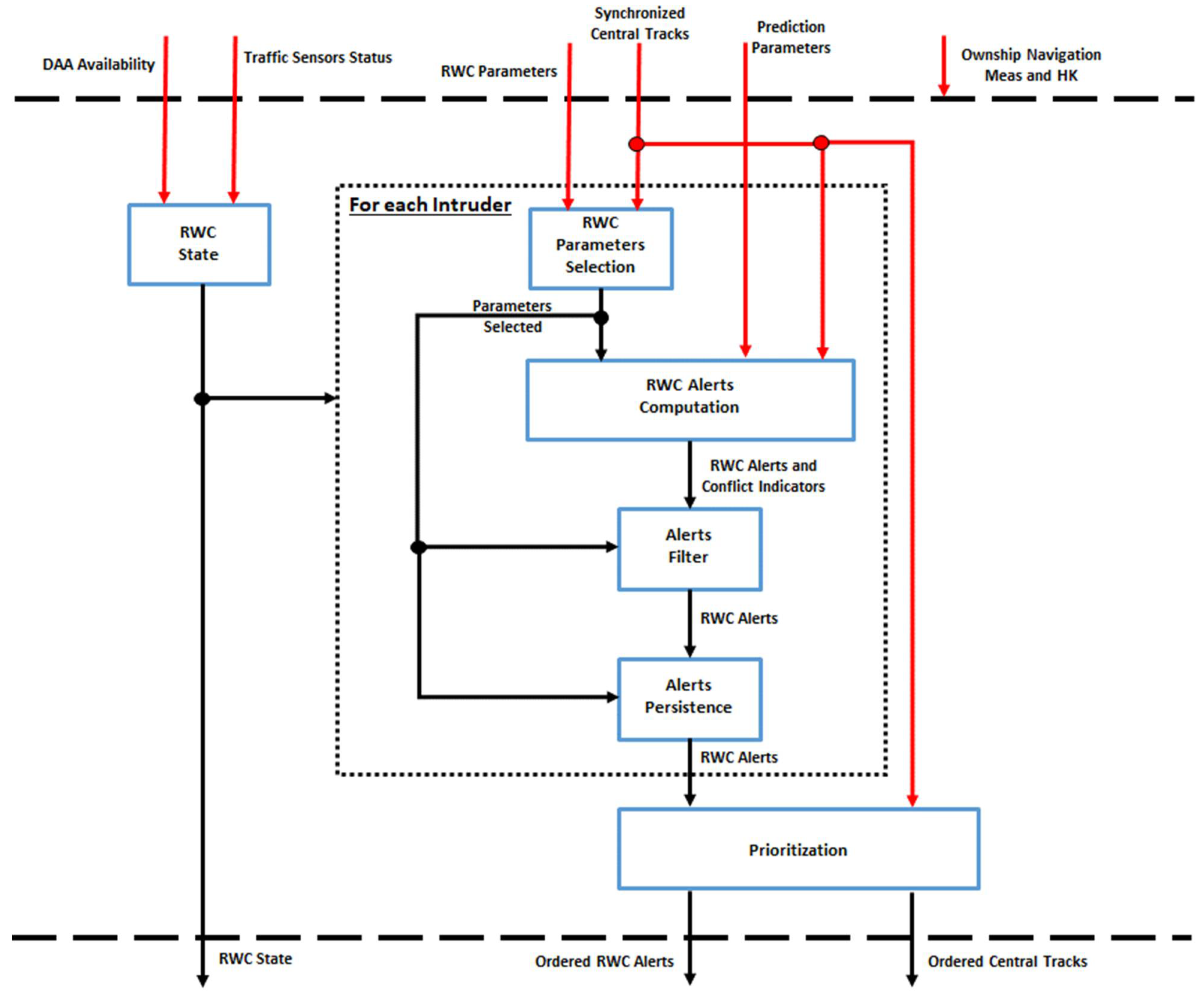
4.4.2. RWC Alerting Function
- The RWC function is working properly;
- There is an RWC function degradation due to a degradation of the own RPA onboard navigation measures or to a failure of one of the traffic sensors onboard;
- There is a loss of the RWC functionality due to a critical alarm such as: own RPA GPS loss or no traffic sensors properly working.
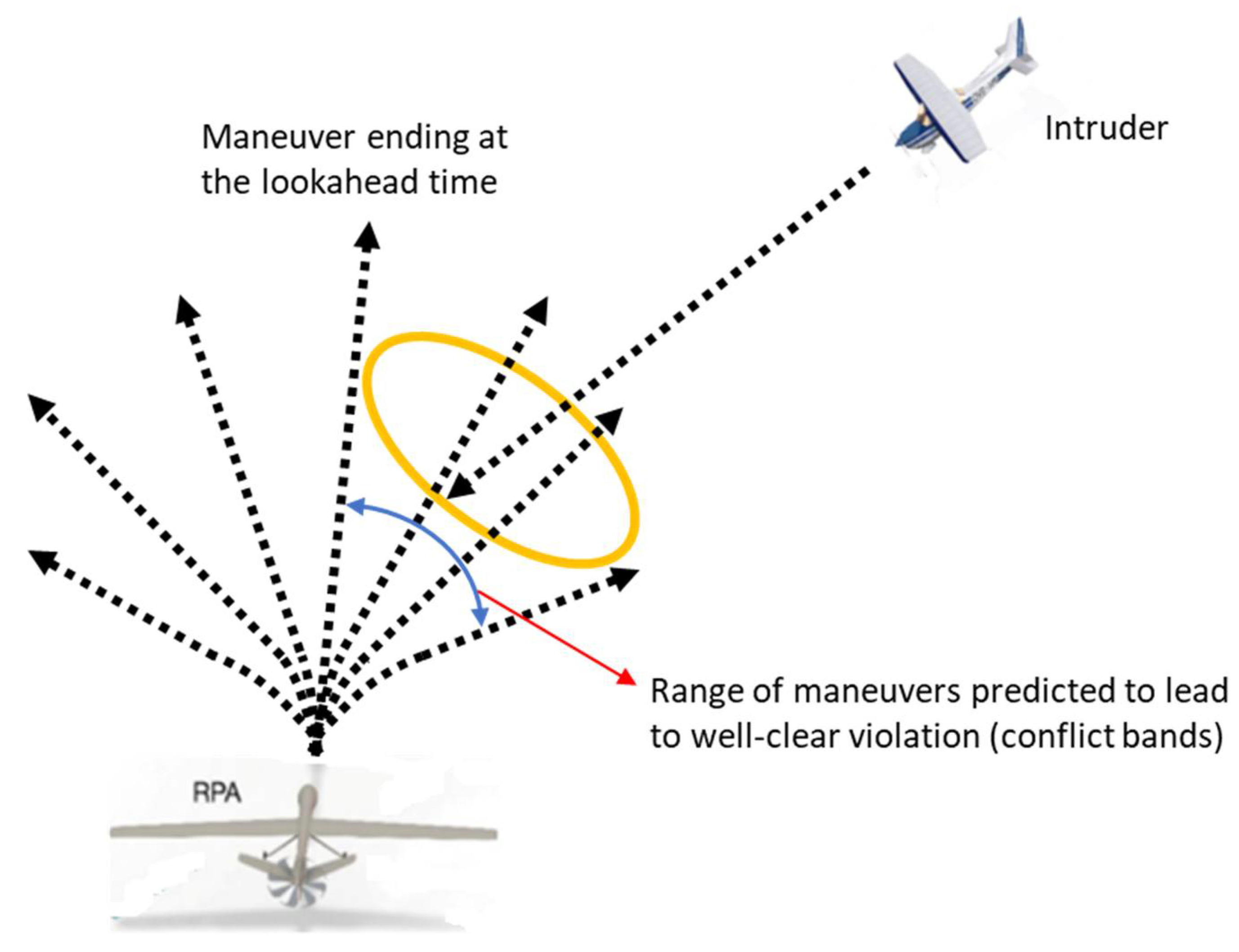
4.4.3. RWC Guidance Function
- In case an intruder without bearing has been detected, the horizontal bands are saturated.
- In case an intruder without altitude has been detected, the vertical bands are saturated.
- In case an intruder issues a vertical RA, the vertical bands are saturated depending on the type of resolution maneuver (i.e., climb or descend).
- In case an intruder issues a horizontal RA, the horizontal bands are saturated depending on the type of resolution maneuver (i.e., left or right turn).
4.5. DAA RWC Display
- White represents usual non-threat traffic.
- Cyan represents traffic for which an advisory alert has been issued.
- Amber represents traffic for which a caution alert has been issued.
4.6. Differences between the US and the European RWC
- Quantification of the Well Clear volume has been revised and is based on fast-time simulations and the EUROCONTROL CAFÉ encounter model [20];
- Removal of the DO-365 warning alerts [15], because in the European context the RP flying in classes D and E is not allowed to perform maneuvers without clearance from ATCo;
- Advisory alert is defined differently from the DO-365 preventive alert;
- Caution alert times are based on FTS and the EUROCONTROL CAFÉ encounter model;
- Different behavior of the system in encounter with ACAS equipped intruders;
- Different behavior of the system in encounter with non-cooperative intruders;
- Simplification and reduction of information to essential ones for the HMI;
- Definition of RP operational procedures compliant with current European rules.
5. Real-Time Test Campaign
- A first RT campaign with the emphasis on a special build of a fixed-wing drone;
- A second RT campaign in which the improvements identified during the first RT campaign have been tested;
- A third RT campaign with the aim to test several builds of rotorcraft drones using the parameters consolidated during the second RT campaign.
5.1. Real-Time Simulation Objectives
- Evaluate the capability of RWC to avoid LoWC in nominal conditions accounting for the surveillance sensor accuracies, the presence of other interfering traffic (even causing simultaneous predicted LoWC), and the maneuver performed by the RP. This is needed because the FTS executed only concerned “Open Loop” evaluations (i.e., without actually performing the maneuver for avoiding LoWC) in peer-to-peer encounters, without sensor errors.
- Evaluate the interoperability of RWC with ACAS-equipped intruders (i.e., verify that the time interval from the Caution alert activation up to the execution by the RP of the Well Clear maneuver did not trigger the RA activation of the TCAS-II system).
- Evaluate the interoperability of RWC with ATCo separation provisions (i.e., the Caution alert does not overlap temporally to the ATCo’s separation indications).
- Evaluate the capability of RWC to manage some key contingency situations in which one of the systems involved in the encounter has an operational degradation due to a failure. The FTS did not analyze any of these situations. However, a comprehensive analysis of system resilience/robustness to any contingency situation was not in the scope of the URClearED project. Therefore, only the following contingencies have been considered: loss of voice communication, loss of C2L, and failure of some navigation/surveillance RPAS equipment.
- Assess whether the introduction of the RWC function in transition scenarios between different classes of airspace will have an impact on Remote Pilot and ATCo roles and responsibilities. In fact, the rules under which the conflicting aircraft are operating change according to the specific airspace classes involved. This could impact the roles and responsibilities of involved actors. If an IFR RPAS flying in airspace classes D or E interacts with VFR flights, the separation might be managed by an ATCo. In airspaces F to G IFR, aircraft will not receive ATCo separation provision;
- Assess whether there are any new information requirements on the Remote Pilot and ATCo side, communication modalities and means, communication load (that can affect the workload of the controller), and team situational awareness because the communication between the controller and the Remote Pilot might be subject to changes with the introduction of the RWC function;
- Evaluate the DAA RWC HMI in order to identify any negative effects on the Remote Pilot’s performance.
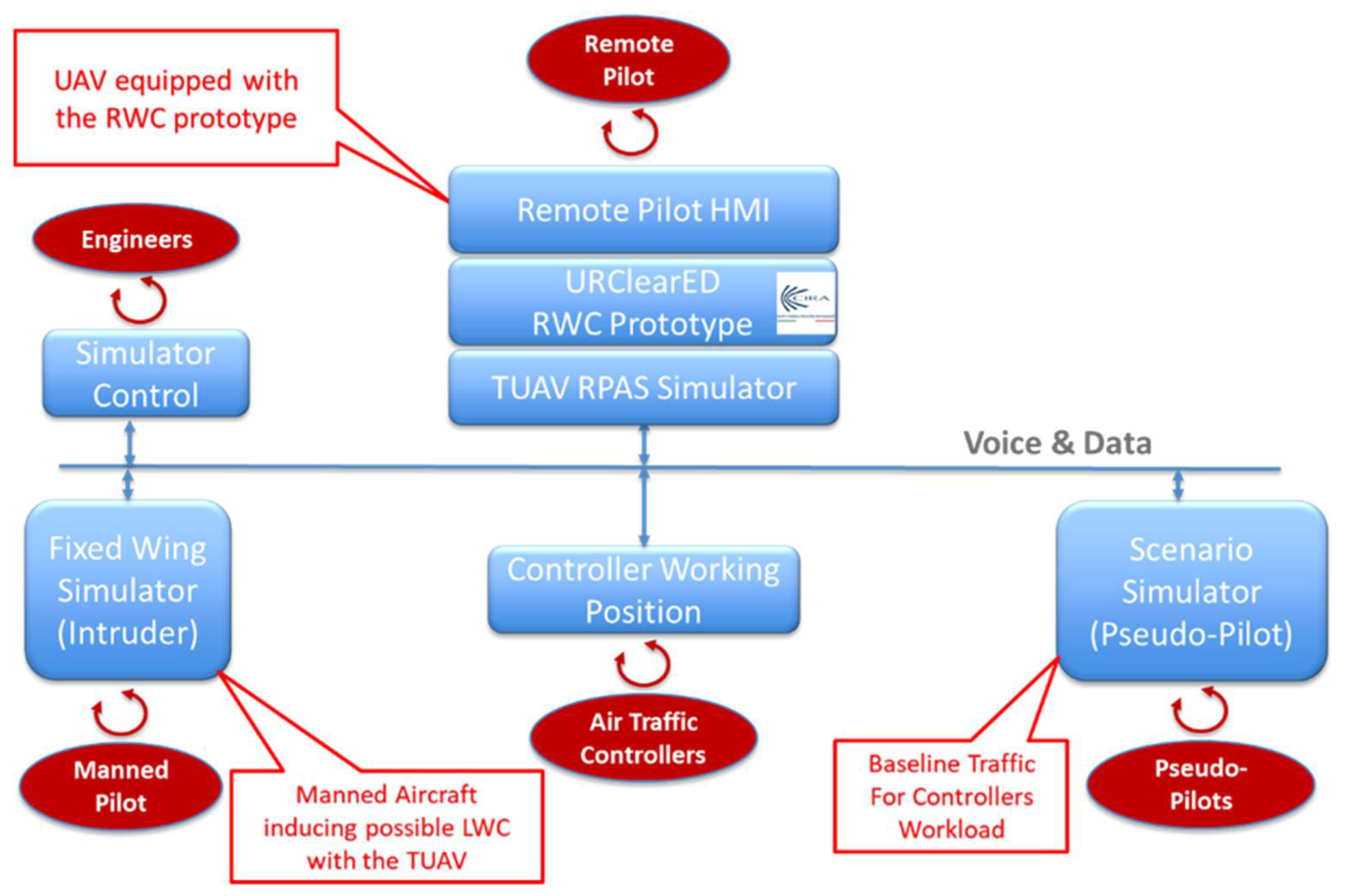
5.2. Real-Time Simulation Infrastructure
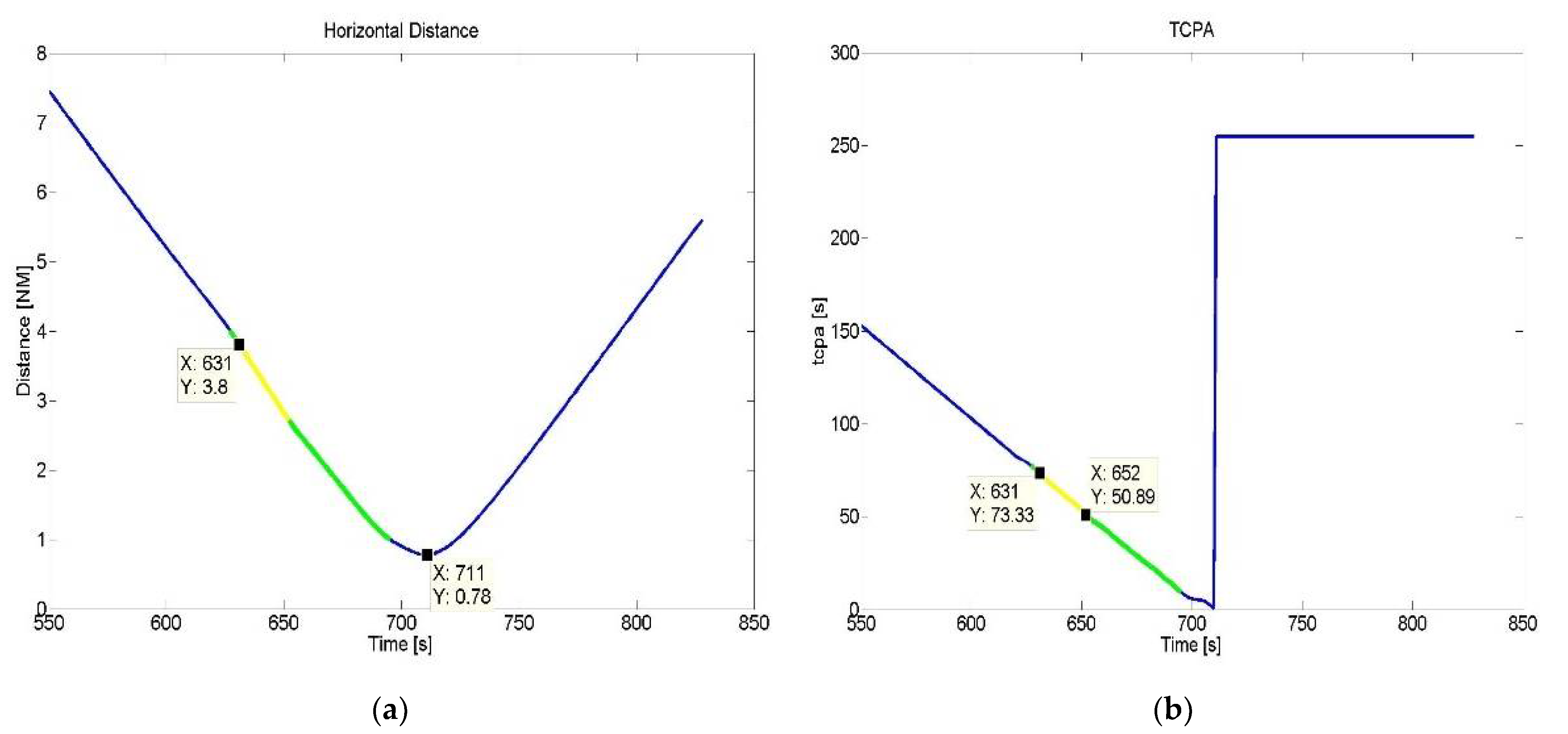
5.3. Real-Time Simulation Results
- Contingencies (e.g., the RWC system did not work or the RP had difficulties in the execution of the RWC maneuver through the AP system).
- Limited FOV of the radar sensor (i.e., the non-cooperative intruders appear suddenly near the own RPA or disappear during an encounter determining the LoWC).
- Accelerated encounters (i.e., the intruder executes a maneuver toward the own RPA at a relative low distance and/or high speed).
- The ATCo separation provisions.
- The RWC system indications but asking the clearance of the ATCo (mainly in controlled airspace class E in encounters with VFR intruders).
- The RWC system indications without asking any clearance (i.e., in uncontrolled airspace classes).
5.4. Comparison with DO-365A RWC Alerting
- Identification of all encounters with intermittent alerts.
- Identification of all encounters in which an intruder maneuver caused a sudden transition from an alert-free situation to a situation in which Well Clear is lost, i.e., in which no credit can be taken that a DAA alert might have resulted in a pilot maneuver that would have prevented Loss of Well Clear.
- Identification of encounters in which own RPA maneuver occurred during the Corrective alert and no Warning alert was issued.
- Identification of encounters in which own RPA maneuver occurred during the Corrective alert or Warning alert and Loss of Well Clear was avoided.
- Identification of encounters in which own RPA maneuver occurred during the Corrective alert or Warning alert and Loss of Well Clear was not avoided.
6. Conclusions
- The measured RWC alert timing was sufficient to coordinate with the ATCo, if needed, and to avoid the Loss of Well Clear for all types of intruder equipment and encounter geometries, supporting the RP in the resolution of conflicts in all the tested airspace classes.
- LoWC in nominal conditions has occurred in:
- ○
- Accelerated encounters (i.e., intruders executing a maneuver toward the own RPA at a relatively low distance and/or high speed), which are characterized by a short time of CPA at the Caution alert activation that did not give sufficient time for RP to react.
- ○
- Encounters with non-cooperative intruders due to the limited field-of-view of the non-cooperative traffic sensor onboard the own RPA.
- The RWC systems also demonstrated the desired behavior in multi-intruder encounters tested.
- In encounters with ACAS-equipped intruders, the time interval from the Caution alert activation up to the execution by the RP of the Well Clear maneuver did not trigger the RA activation of the TCAS-II system. This indicates the interoperability of the proposed RWC system with the TCAS-II systems.
- ATCo separation provisions, when available, were well in advance with respect to the RWC Caution alert activation. This indicates the interoperability of the RWC system with the separation service given by ATCo in controlled airspace.
- All the remote test pilots reported that the implemented system provides a good situational awareness, coherent with the actual traffic dynamical evolution. Specifically, it provides added value with respect to the ATCo information in all tested airspace classes D-E-G;
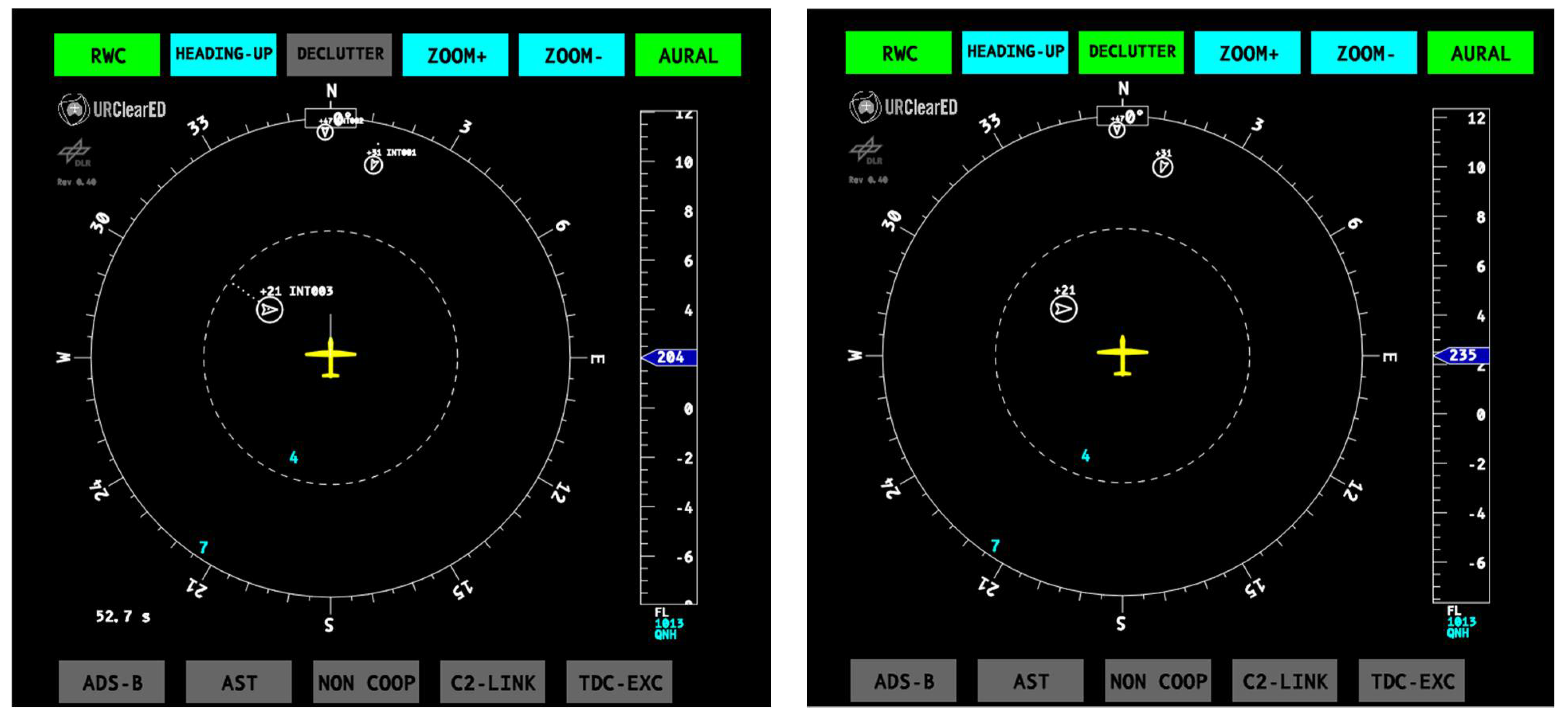
- In the second RTS, the RP gave a positive feedback on the CDTI that was updated with respect to the first session in order to visualize the traffic information (name of the intruder, flight level, climb/descent indication, zoom level indication) with a greater font size;
- In controlled airspaces D-E, the RP should not call/maneuver autonomously, but having a long-range traffic visibility, through the surveillance function, pilots tended to act in advance with respect to ATCo instructions or the RWC alerts. A recommendation derived from the previous point, is that specific RWC procedures should be defined and the RPs should be adequately trained to use them, before the new tool can be effectively adopted into actual operational environments;
- Further evaluation of the trade-offs between the Caution alert time margins to avoid LoWC and the time margins between LoWC and CA alerts.
- Upgrade of RWC guidance function for accounting limitations in the field-of-view of non-cooperative sensors.
- Upgrade of RWC alerting function to account for maneuverability of intruders.
- Need for detailed RP procedures and related specific training regarding the use of the RWC in the airspace classes D–G, in order to mitigate the risk of bringing the RPs to execute separation with the traffic before calling ATCo.
Author Contributions
Funding
 This project has received funding from the SESAR Joint Undertaking (JU) under grant agreement No 892440. The JU receives support from the European Union’s Horizon 2020 research and innovation program and the SESAR JU members other than the Union.
This project has received funding from the SESAR Joint Undertaking (JU) under grant agreement No 892440. The JU receives support from the European Union’s Horizon 2020 research and innovation program and the SESAR JU members other than the Union.Acknowledgments
Conflicts of Interest
Acronyms
| ACAS | Airborne Collision Avoidance System |
| ADS-B | Automatic Dependent Surveillance-Broadcast |
| AP | Autopilot |
| ATCo | Air Traffic Controller |
| ATM | Air Traffic Management |
| C2L | Command and Control Link |
| CA | Collision Avoidance |
| CDTI | Cockpit Display of Traffic Information |
| CPA | Closest Point of Approach |
| CPDS | Conflict Prediction and Display System |
| CWP | Controller Working Position |
| DAA | Detect And Avoid |
| FMS | Flight Management System |
| FTS | Fast Time Simulation |
| GA-ASI | General Atomics – Aeronautical Systems |
| GNC | Guidance Navigation and Control |
| HK | Housekeeping |
| HMD | Horizontal Miss Distance |
| HMI | Human Machine Interface |
| HP | Human Performance |
| HST | Horizontal Spatial Threshold |
| HTT | Horizontal Temporal Threshold |
| IFR | Instrumental Flight Rules |
| ISF | Integrated Simulation Facility |
| LAT | Look Ahead Time |
| LoWC | Loss of Well Clear |
| MALE | Medium Altitude Long Endurance |
| MFD | Multifunctional Flight Display |
| MOPS | Minimum Operational Performance Standards |
| NMAC | Near Mid Air Collision |
| OSED | Operational Services and Environment Definition |
| PFD | Primary Flight Display |
| RA | Resolution Advisory |
| RP | Remote Pilot |
| RPA | Remotely Piloted Aircraft |
| RPAS | Remotely Piloted Aircraft System |
| RPS | Remote Pilot Station |
| RT | Real Time |
| RTS | Real-Time Simulation |
| RUAV | Rotorcraft Unmanned Aerial Vehicle |
| RWC | Remain Well Clear |
| TAS | Active Surveillance Transponder |
| TCAS-II | Traffic Collision Avoidance System-II |
| TUAV | Tactical Unmanned Aerial Vehicle |
| UAV | Unmanned Aerial Vehicle |
| VFR | Visual Flight Rules |
| VST | Vertical Spatial Threshold |
| WCV | Well Clear Volume |
References
- European RPAS Steering Group. Roadmap for the Integration of Civil Remotely-Piloted Aircraft System; European Union: Brussels, Belgium, 2013. [Google Scholar]
- Federal Aviation Administration. Integration of Civil Unmanned Aircraft Systems (UAS) in the National Airspace System (NAS) Roadmap, 2nd ed.; FAA: Washington, DC, USA, 2018.
- Pastor, E.; Peinecke, N.; Theunissen, E.; Corraro, F.; Shaw, C.; Taurino, D.; Hagstrom, P. URClearED–Defining the Remain Well Clear Concept for Airspace D-G Classes in the European Airspace. In Proceedings of the AIAA Aviation Forum, Virtual Event, 2–6 August 2021. [Google Scholar]
- ICAO Annex2. Rules of the Air, 10th ed.; ICAO: Montreal, QC, Canada, 2005. [Google Scholar]
- EASA. Easy Access Rules for Standardised European Rules of the Air (SERA)—Part A; EASA: Cologne, Germany, 2022.
- Upchurch, J.M.; Munoz, C.A.; Narkawicz, A.J.; Chamberlain, J.P.; Consiglio, M.C. Analysis of Well-Clear Boundary Models for the Integration of UAS in the NAS; NASA Technical Memorandum: Hampton, VA, USA, 2014.
- Cook, S.P.; Brooks, D.; Cole, R.; Hackenberg, D.; Raska, V. Defining Well Clear for Unmanned Aircraft Systems. In Proceedings of the AIAA Infotech at Aerospace Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Comstock, J.R.; Ghatasm, R.W.; Vincent, M.J.; Consiglio, M.C.; Munoz, C.A.; Chamberlain, J.P.; Volk, P.; Arthur, K.E. Unmanned Aircraft Systems Human-in-the-Loop Controller and Pilot Acceptability Study: Collision Avoidance, Self-Separation, and Alerting Times (CASSAT); NASA Technical Memorandum: Hampton, VA, USA, 2016.
- Fern, L. SC-228 Inclusion of DAA Warning Alert for TCAS Interoperability; NASA Technical Reports: Washington, DC, USA, 2016.
- Williams, K.W.; Caddigan, E.; Zingale, E. An Investigation of Minimum Information Requirements for an Unmanned Aircraft System Detect and Avoid Traffic Display; FAA: Washington, DC, USA, 2017; Technical Report DOT/FAA/AM-17/14.
- EUROCAE ED-258; Operational Services and Environment Description for Detect and Avoid [Traffic] in Class D-G Airspaces under VFR/IFR. EUROCAE: Saint-Denis, France, 2019.
- SESAR Joint Undertaking. P.J. 13-Solution 111. Operational Service and Environment Definition (OSED); SESAR JU: Brussels, Belgium, 2020. [Google Scholar]
- MIDCAS. Final Technical Presentation of Task 2.5; MIDCAS Final Workshop: Brussels, Belgium, 2015. [Google Scholar]
- European Detect and Avoid (DAA) Function Based on New Sensors and Processing for RPAS Integration into Air-Traffic Management (EUDAAS). Available online: https://ec.europa.eu/commission/presscorner/detail/en/fs_20_1082 (accessed on 19 September 2022).
- RTCA DO-365; Minimum Operational Performance Standard (MOPS) for Detect and Avoid (DAA) Systems. RTCA: Washington, DC, USA, 2017.
- RTCA DO-365; Minimum Operational Performance Standard (MOPS) for Detect and Avoid (DAA) Systems. Revision A. RTCA: Washington, DC, USA, 2020.
- ICAO Annex 11. Air Traffic Services, 13th ed.; ICAO: Montreal, QC, Canada, 2001. [Google Scholar]
- RTCA. RTCA-DO-185B—Minimum Operational Performance Standards for Traffic Alert and Collision Avoidance System (TCAS II) Airborne Equipment—Change 2; RTCA: Washington, DC, USA, 2013. [Google Scholar]
- Commission Regulation (EU). Laying down Common Airspace Usage Requirements and Operating Procedures for Airborne Collision Avoidance; European Union: Brussels, Belgium, 2011. [Google Scholar]
- Howell, R.; Hutchinson, H.; Morton, O.T. CAFE: Encounter Generator Tool (EGT)–Software Design Document (SDD); EUROCONTROL: Brussels, Belgium, 2018. [Google Scholar]
- EUROCONTROL. Guidelines for Short Term Conflict Alert Part III—Implementation and Optimization Examples; EUROCONTROL: Brussels, Belgium, 2017. [Google Scholar]
- Munoz, C.; Narkawicz, A.; Hagen, G.; Upchurch, J.; Dutle, A.; Consiglio, N. Daidalus: Detect and avoid alerting logic for unmanned systems. In Proceedings of the 34th Digital Avionics Systems Conference (DASC), Prague, Czech Republic, 13–17 September 2015. [Google Scholar]
- RTCA DO-257B; Minimum Operational Performance Standards for the Depiction of Navigational Information on Electronic Maps. RTCA: Washington, DC, USA, 2018.
- Genito, N.; Montemari, F.; Palumbo, R.; Rispo, D.; Corraro, G.; Canzolino, P. Integrated simulation facility for interoperability operation. Lect. Note Comput. Sci. 2014, 8906, 105–121. [Google Scholar]
- Theunissen, E.; Kotegawa, T. Applying LVC to Testing and Evaluation of DAA Systems. In Proceedings of the 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Ceiling (ft) | Min Speed (kts) | Max Speed (ktas) | Max Climb-Descent Rate (ft/min) | Max Turn Rate (deg/s) |
|---|---|---|---|---|---|
| TUAV/RUAV | 15,000 | 50 | 100 | 500–500 | 3 |
| MALE | 25,000 | 70 | 200 | 1500–1500 | 3 |
| Intruder Type | Altitude | WVC Thresholds HST/HTT/VST | LAT |
|---|---|---|---|
| Non-cooperative | <10,000 ft | TUAV: 2200 ft/0 s/450 ft MALE: 3040 ft/0 s/450 ft | 65 s |
| Non-cooperative | >10,000 ft | 3040 ft/20 s/450 ft | 65 s |
| Cooperative No ACAS | <10,000 ft | 3040 ft/20 s/450 ft | 65 s |
| Cooperative No ACAS | >10,000 ft | 3040 ft/20 s/450 ft | 65 s |
| Cooperative with ACAS | <10,000 ft | 0.55 NM/25 s/600 ft | 65 s |
| Cooperative with ACAS | >10,000 ft | 0.8 NM/30 s/600 ft | 65 s |
| RWC Alert | No. of Encounters | No. of LoWC | Airspace Class | Intruder Type | Analysis of LoWC |
|---|---|---|---|---|---|
| No Alert | 10 | 1 | D | Non-Coop. | LoWC occurred due to an RWC failure. |
| Advisory Alert | 14 | 0 | N/A | N/A | N/A |
| Caution Alert | 13 | 5 | G | One Coop. | The intruder maneuvers toward the own RPA. |
| Four Non-Coop | Two LoWC due to the FOV of the radar; Two LoWC due to the intruder maneuvering toward the own RPA. | ||||
| Advisory and Caution Alert | 34 | 12 | Four in D/E | Three Coop. | Two LoWC due to a failure of AP; One LoWC due to the intruder maneuvering toward the own RPA. |
| One Non-Coop | LoWC due to the difficulties of the RP to contact the ATCo due to the high rate of communications. | ||||
| Eight in G | Six Coop | Six LoWC due to the intruder maneuvering toward the own RPA. | |||
| Two Non-Coop. | Two LoWC due to the FOV of the radar. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Corraro, G.; Corraro, F.; Ciniglio, U.; Filippone, E.; Peinecke, N.; Theunissen, E. Implementation and Real-Time Validation of a European Remain Well Clear Function for Unmanned Vehicles. Aerospace 2022, 9, 531. https://doi.org/10.3390/aerospace9100531
Corraro G, Corraro F, Ciniglio U, Filippone E, Peinecke N, Theunissen E. Implementation and Real-Time Validation of a European Remain Well Clear Function for Unmanned Vehicles. Aerospace. 2022; 9(10):531. https://doi.org/10.3390/aerospace9100531
Chicago/Turabian StyleCorraro, Gianluca, Federico Corraro, Umberto Ciniglio, Edoardo Filippone, Niklas Peinecke, and Erik Theunissen. 2022. "Implementation and Real-Time Validation of a European Remain Well Clear Function for Unmanned Vehicles" Aerospace 9, no. 10: 531. https://doi.org/10.3390/aerospace9100531
APA StyleCorraro, G., Corraro, F., Ciniglio, U., Filippone, E., Peinecke, N., & Theunissen, E. (2022). Implementation and Real-Time Validation of a European Remain Well Clear Function for Unmanned Vehicles. Aerospace, 9(10), 531. https://doi.org/10.3390/aerospace9100531