Integrated Control Scheme for an Improved Disturbance-Free Payload Spacecraft

 , ,
, ,
Abstract
:1. Introduction
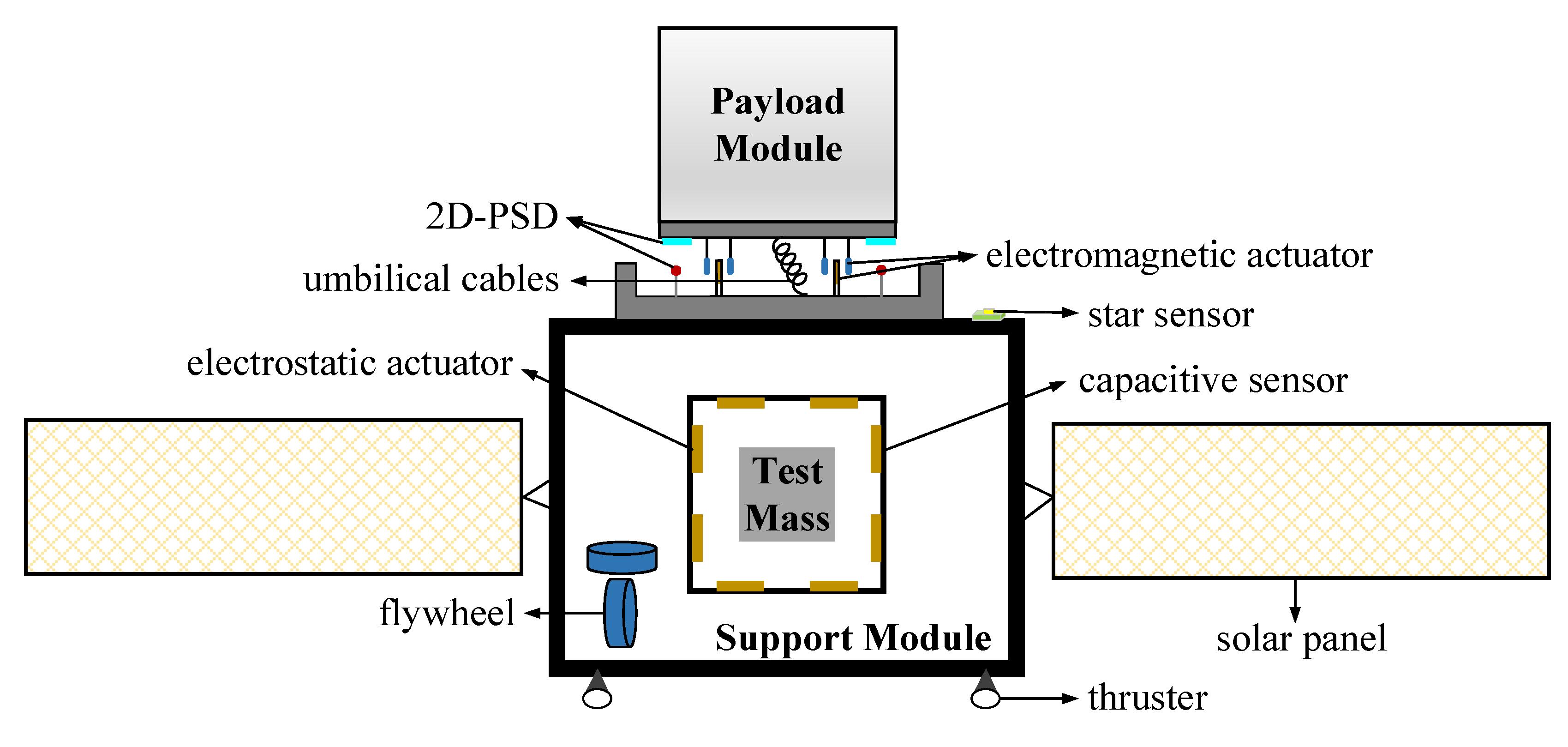
2. System Configuration
3. System Dynamics Modeling and Controller Design
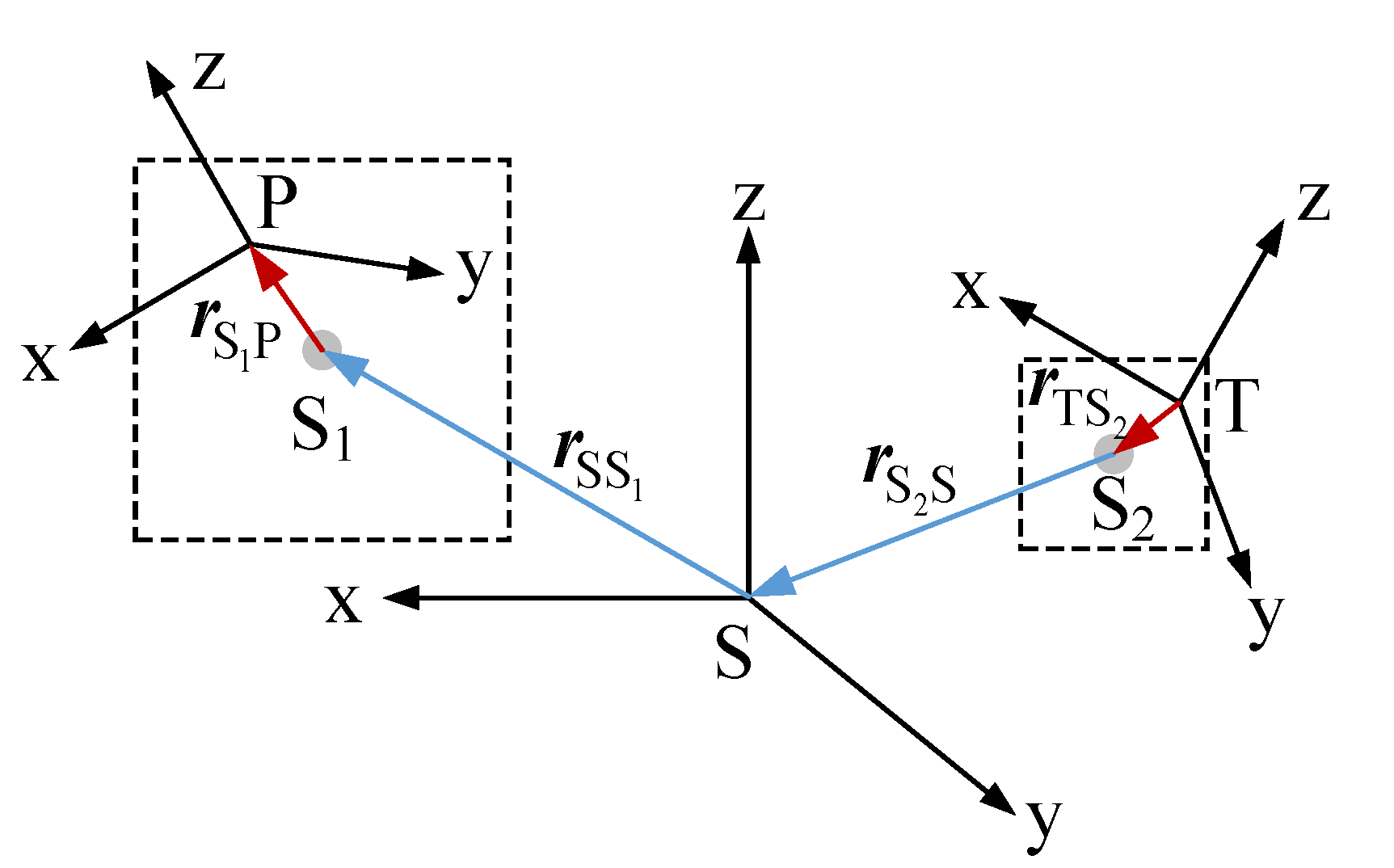
3.1. Dynamics Modeling
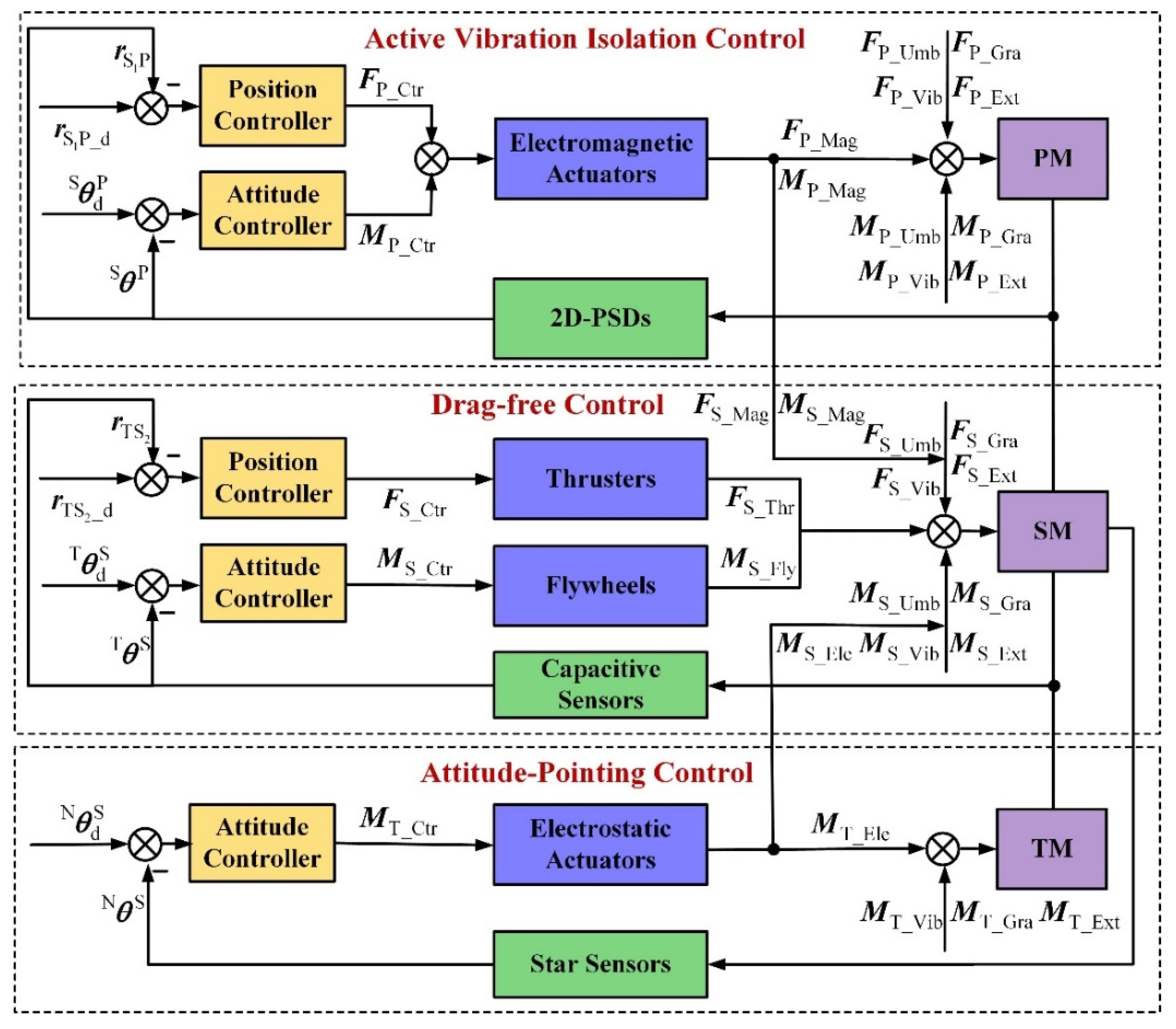
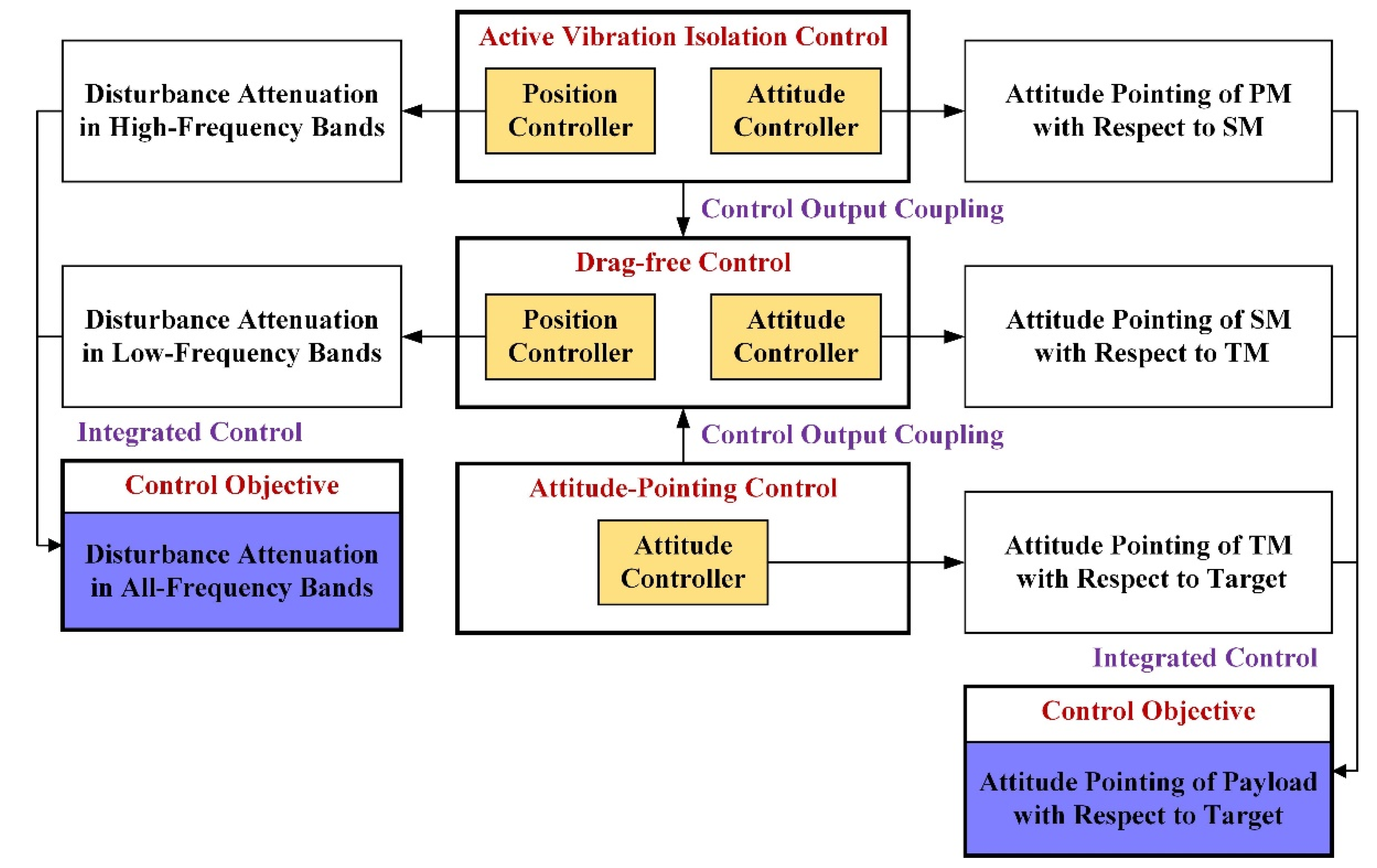
3.2. Controller Design
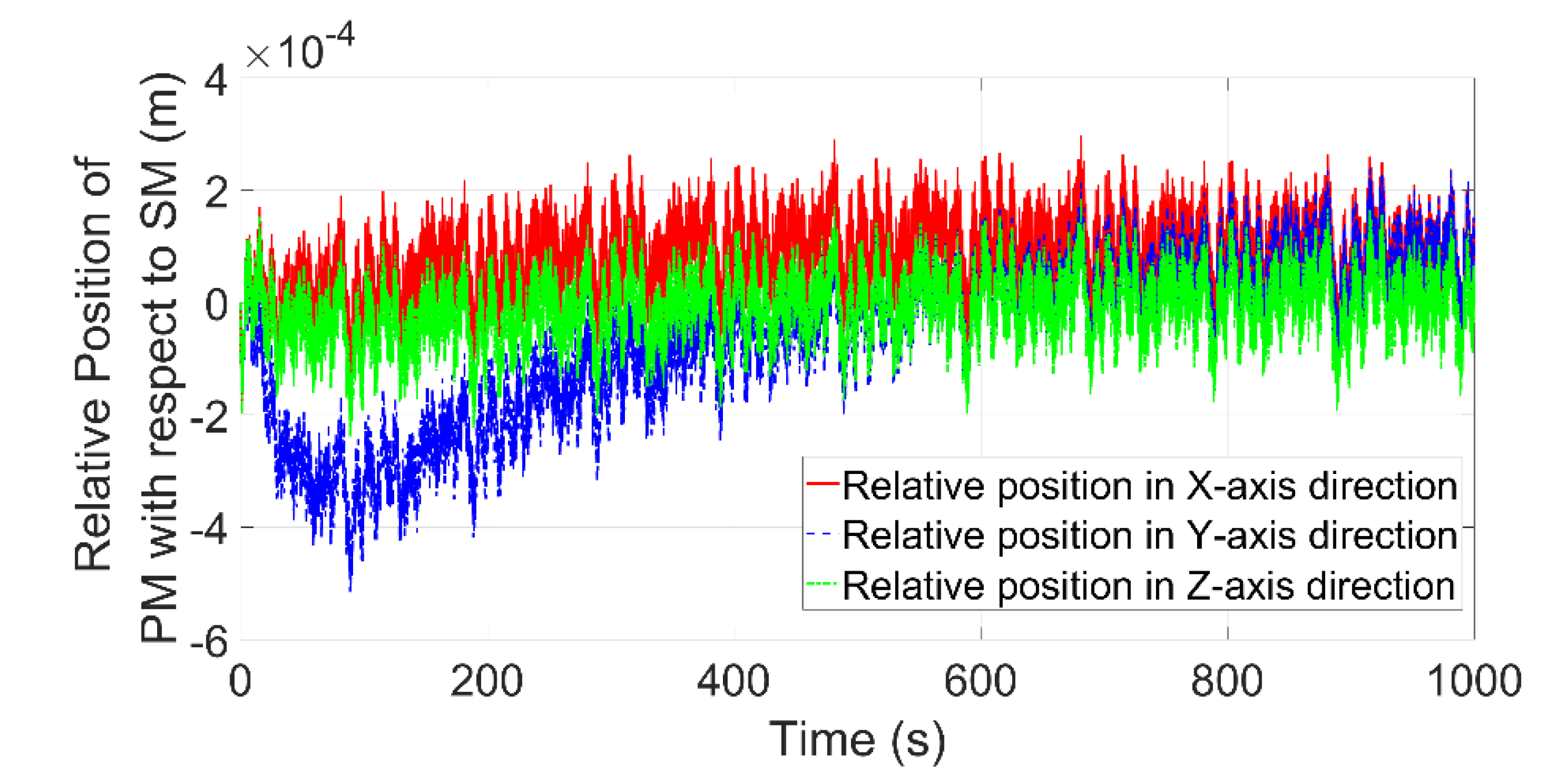
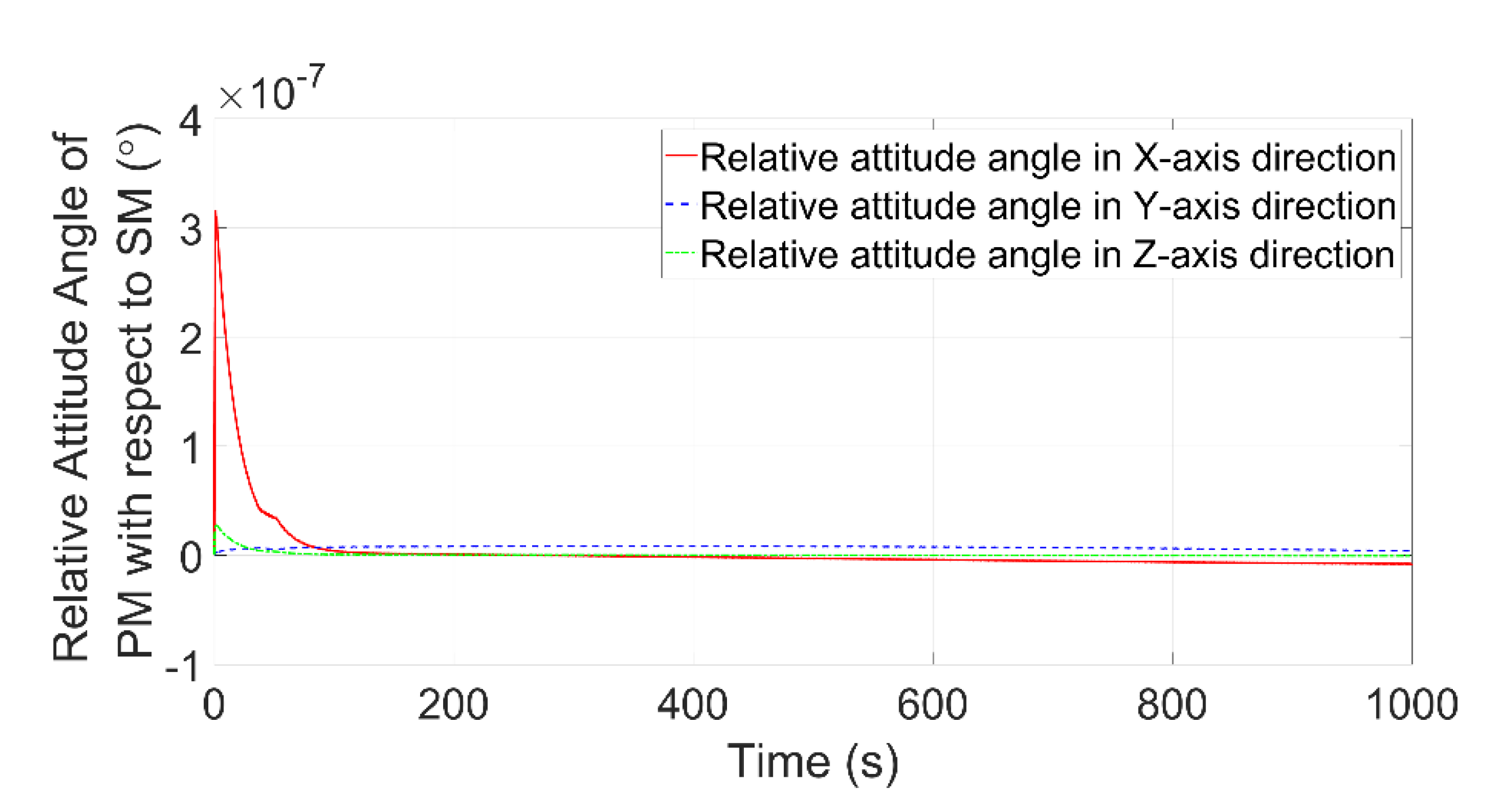
- An active vibration isolation control loop is used to isolate the PM from disturbances in the high-frequency bands, prevent a collision between the PM and the SM, and control the PM to track the attitude of the SM;
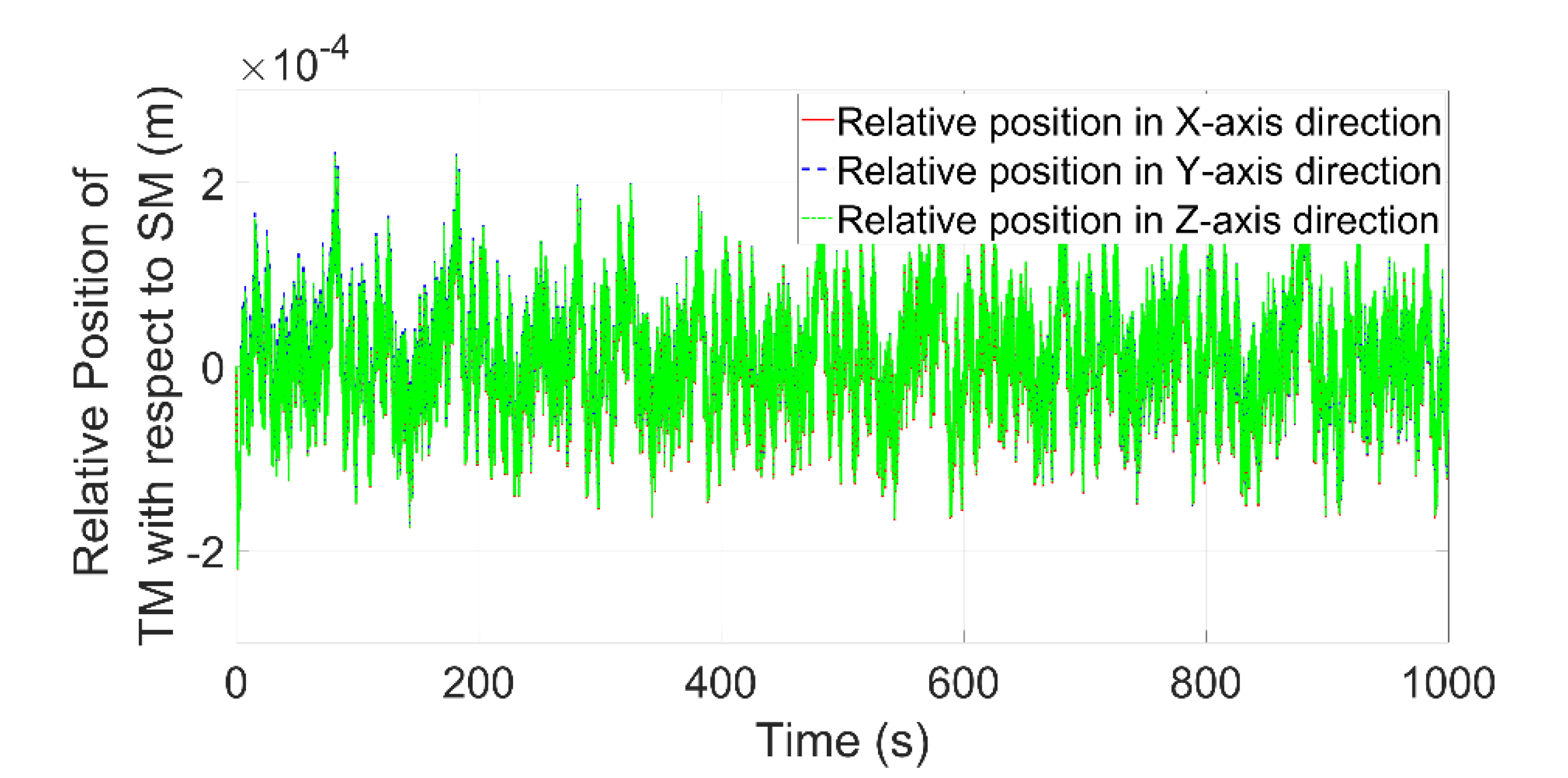
- A drag-free control loop is used to isolate the SM from disturbances in the low-frequency bands, prevent the collision between the SM and the TM, and control the SM to track the attitude of the TM;
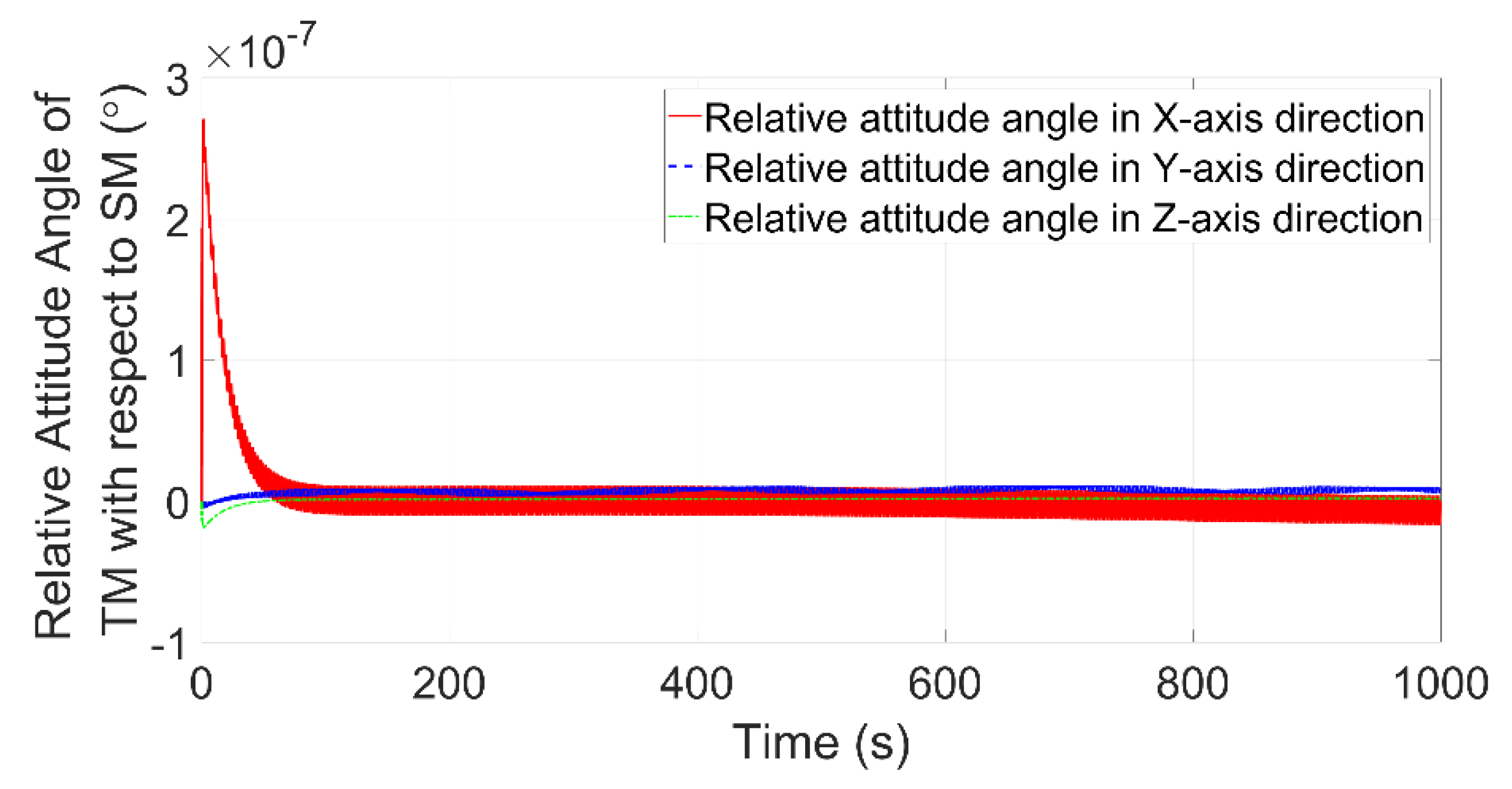
- An attitude-pointing control loop is used to control the TM to track the desired attitude, which is determined by the pointing requirement of the payload.
4. Numerical Simulations
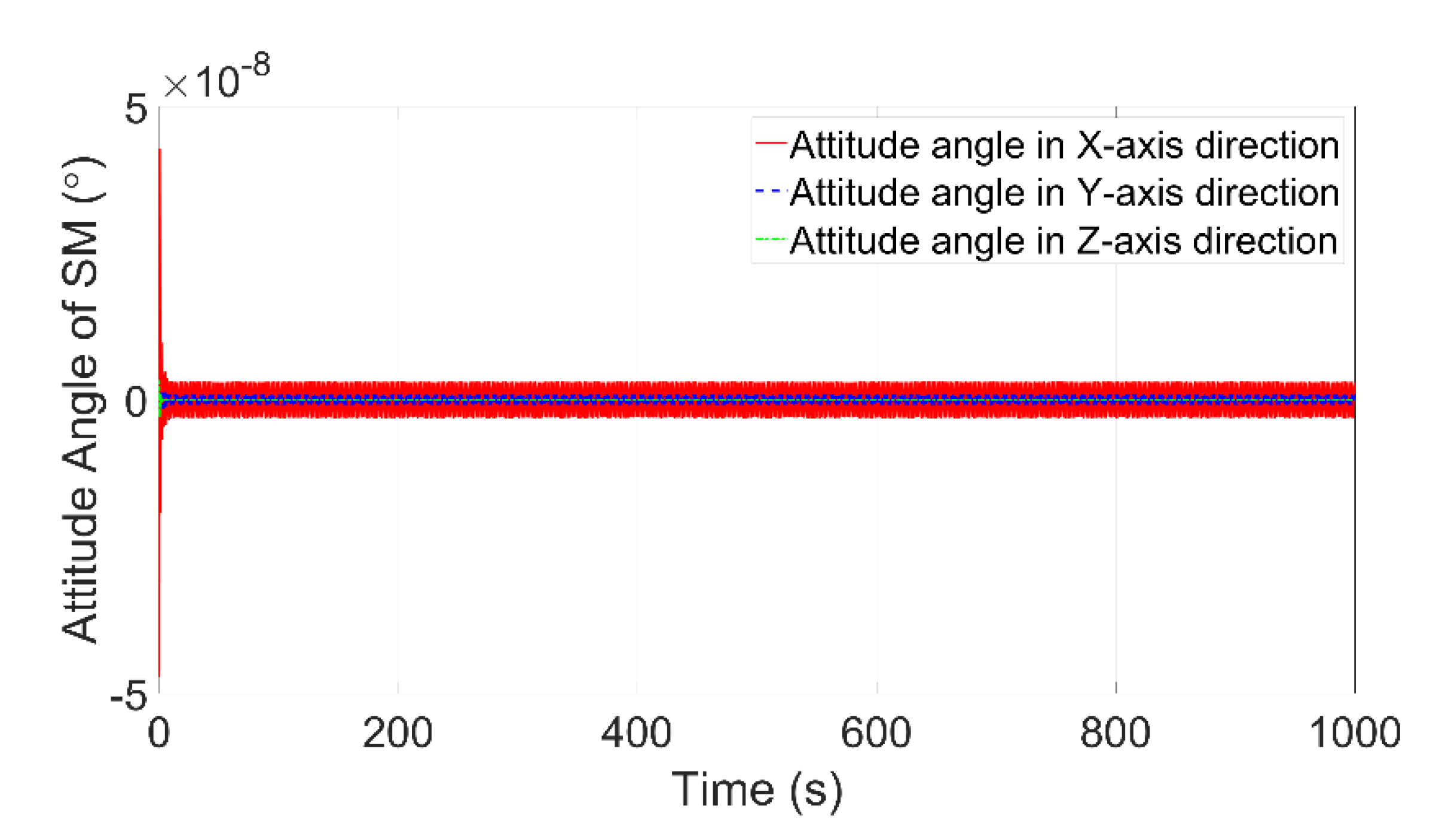
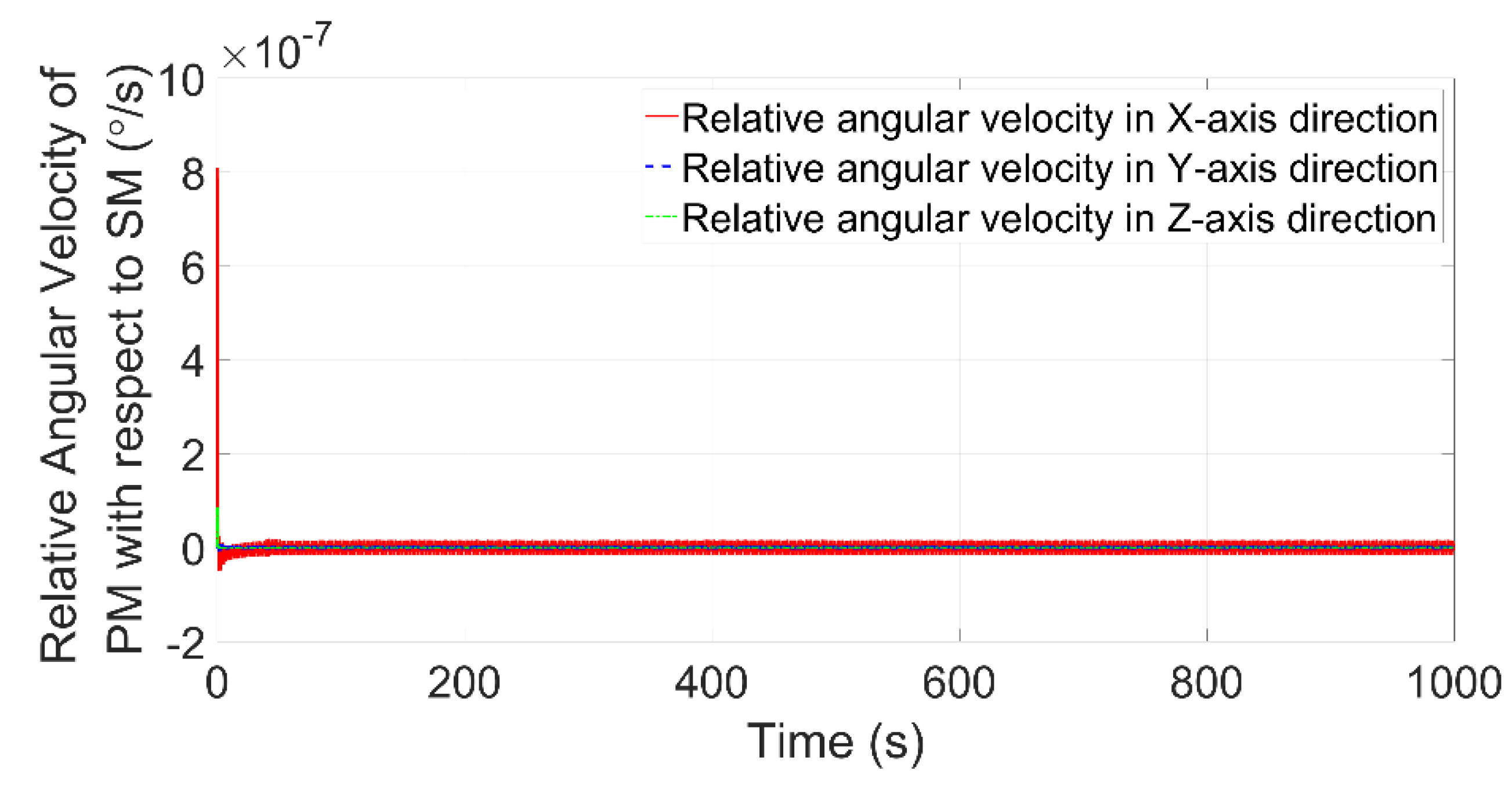
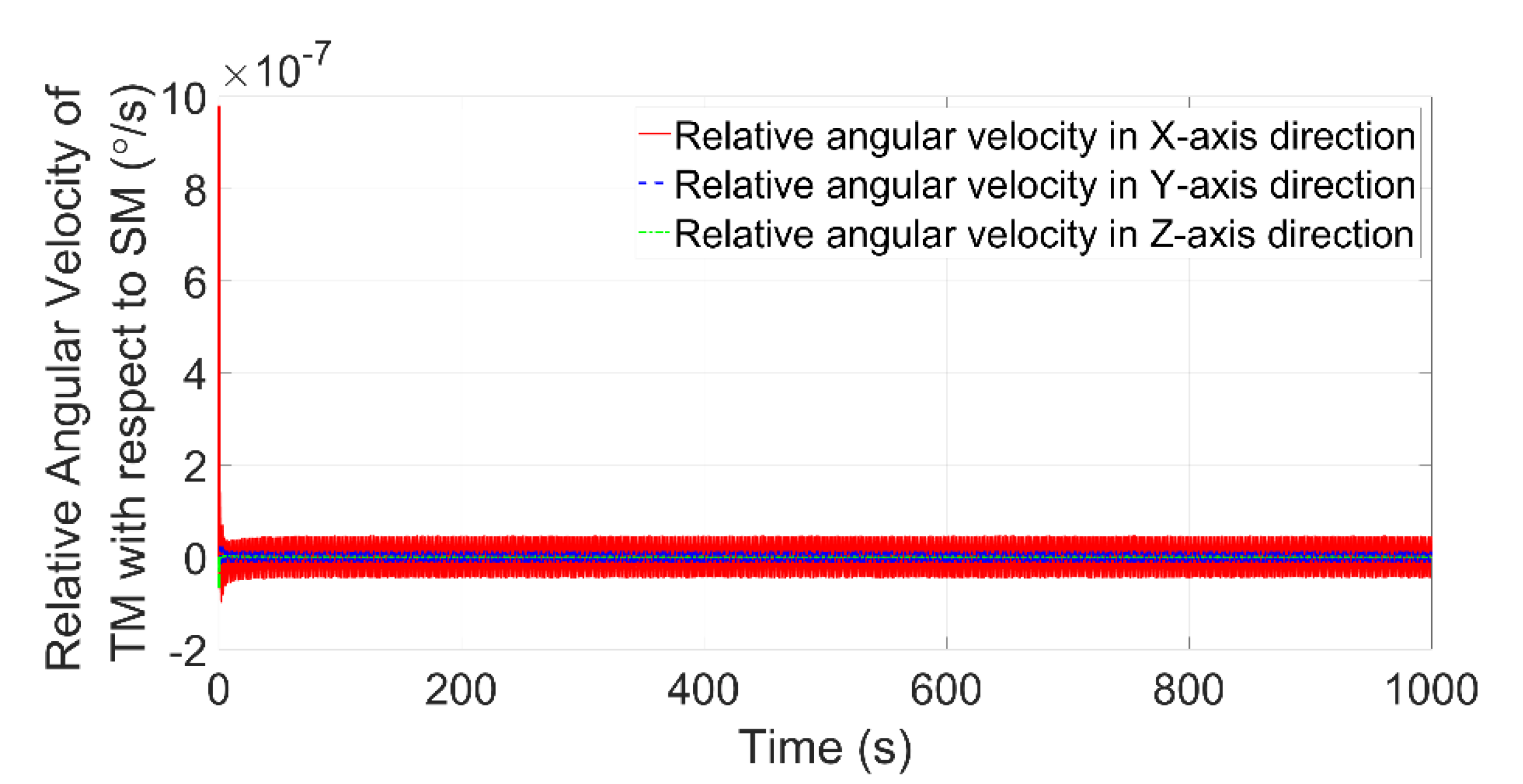
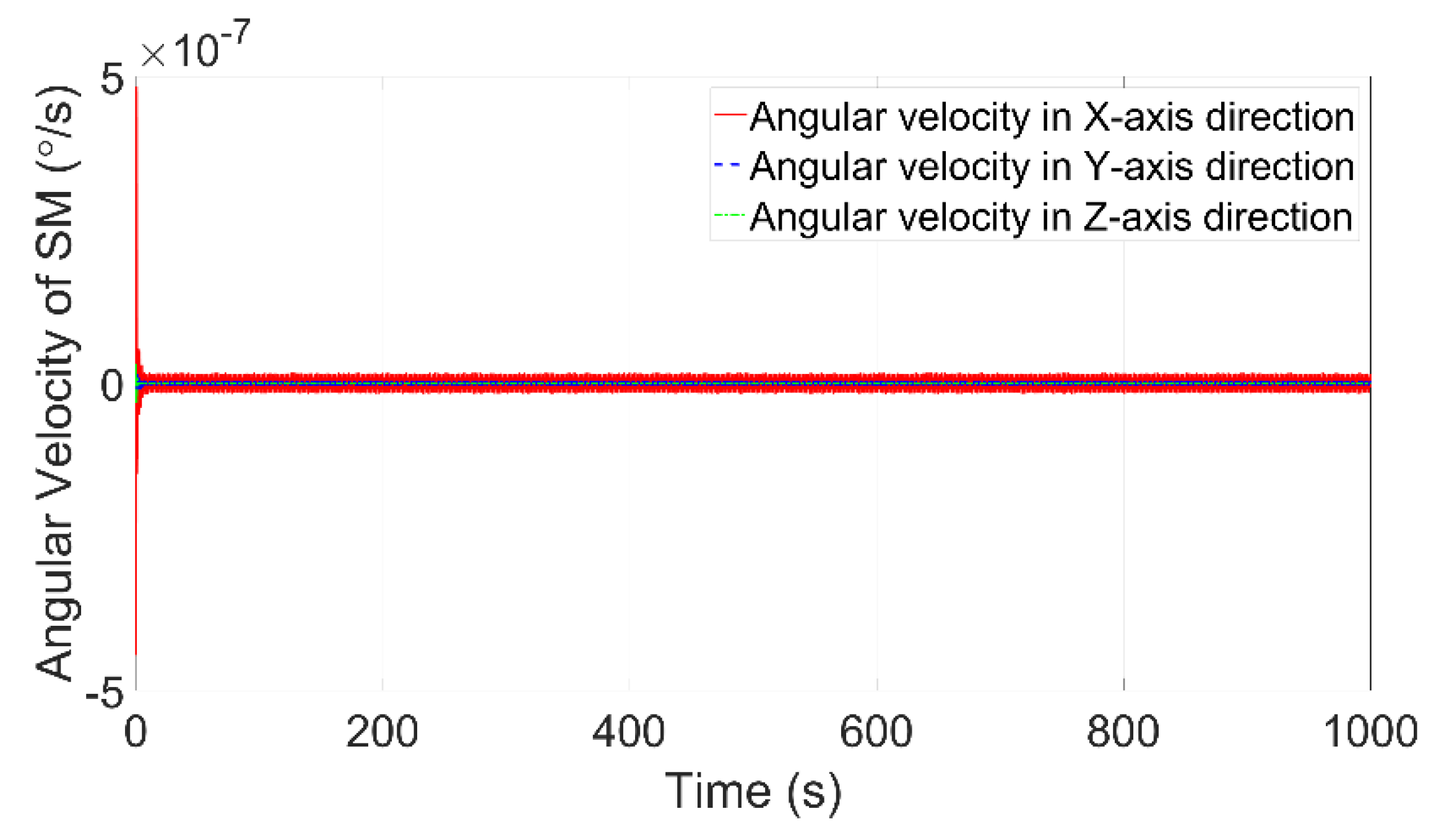
4.1. Stability of Integrated Control
4.2. Pointing Accuracy and Stability
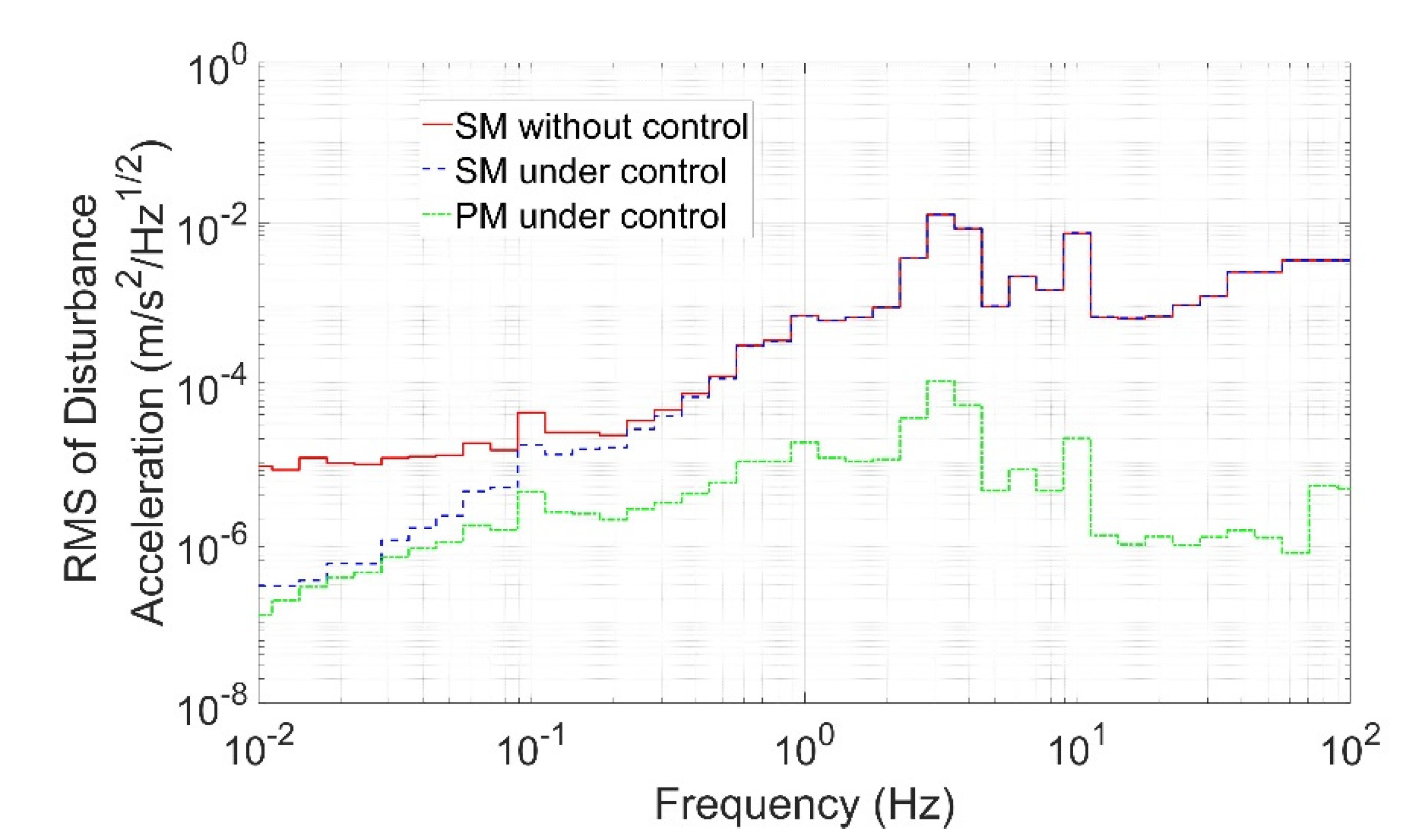
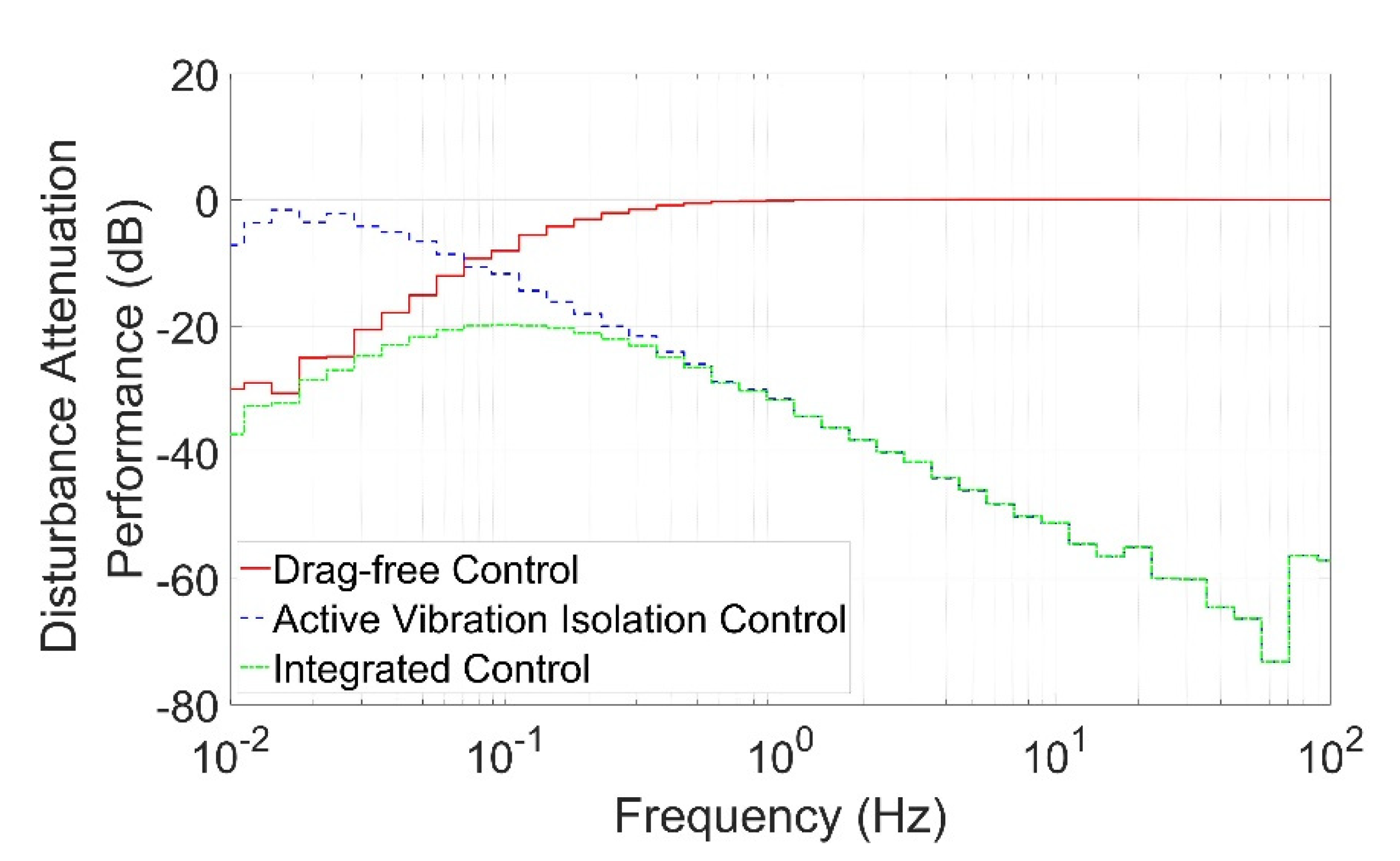
4.3. Disturbance Attenuation Performance
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nordt, A.; Dewell, L. Non-contact vibration isolation and precision pointing for large optical telescopes. Bull. Am. Astron. Soc. 2019, 51, 249. [Google Scholar]
- Bauer, F.H.; Hyde, T.T.; Maghami, P.G. Precision pointing for the laser interferometer space antenna (LISA) mission. In Proceedings of the 2003 AAS Guidance and Control Conference, Breckenridge, CO, USA, 5–9 February 2003. [Google Scholar]
- Dewell, L.; Pedreiro, N.; Blaurock, C.; Liu, K.C.; Alexander, J.; Levine, M. Precision telescope pointing and spacecraft vibration isolation for the Terrestrial Planet Finder Coronagraph. In Proceedings of the SPIE Optics and Photonics, San Diego, CA, USA, 31 July–4 August 2005; p. 589902. [Google Scholar] [CrossRef]
- Chen, C.C.; Hemmati, H.; Biswas, A.; Ortiz, G.; Farr, W.; Pedreiro, N. Simplified lasercom system architecture using a disturbance-free platform. In Proceedings of the Lasers and Applications in Science and Engineering, San Jose, CA, USA, 21–26 January 2006; p. 610505. [Google Scholar] [CrossRef]
- Li, L.; Yuan, L.; Wang, L.; Zheng, R.; Wu, Y.P.; Wang, X.Y. Recent advances in precision measurement & pointing control of spacecraft. Chin. J. Areonaut. 2021, 34, 191–209. [Google Scholar] [CrossRef]
- Shi, J.F.; Cheng, P.F.; Yuan, H.; Ren, G.R.; Wang, W.; Fan, X.W.; Li, Z.G. Analysis and verification of effect of micro-vibration on space photoelectric payload imaging. Acta Opt. Sin. 2019, 39, 0520001. [Google Scholar] [CrossRef]
- Komatsu, K.; Uchida, H. Microvibration in spacecraft. Mech. Eng. Rev. 2014, 1, SE0010. [Google Scholar] [CrossRef]
- Cui, Y.F.; Liu, J.Y.; He, H.Y.; Yin, H. Influence of micro vibration on radiation quality of high resolution TDICCD images. Chin. Space Sci. Techn. 2018, 38, 28–35. [Google Scholar] [CrossRef]
- Pedreiro, N. Spacecraft architecture for disturbance-free payload. J. Guid. Control Dyn. 2003, 26, 794–804. [Google Scholar] [CrossRef]
- Trankle, T.; Pedreiro, N.; Andersen, G. Disturbance free payload flight system analysis and simulation methods. In AIAA Guidance, Navigation, and Control Conference and Exhibit; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2005. [Google Scholar]
- Zhang, W.; Zhai, Y.B.; Liao, H.; Zhao, H.B. Design of an active-quiet isolated and master-slave coordination controlled dual-super satellite platform. Aerosp. Shanghai 2014, 31, 7–11. [Google Scholar] [CrossRef]
- Zhao, T.S.; Zhang, J.Y.; Wu, D.Y.; Luo, R.Z. Dynamic modeling and control method of dual-body satellite. J. Phys. Conf. Ser. 2021, 2029, 012006. [Google Scholar] [CrossRef]
- Regehr, M. Analysis of a Near-Free-Floating Vibration Isolation Platform. In Interplanetary Network Progress Report; NASA: Washington, DC, USA; Jet Propulsion Laboratory: Pasadena, CA, USA; California Institute of Technology: Pasadena, CA, USA, 2015; pp. 42–200. [Google Scholar]
- Edberg, D.L.; Wilson, B.W. Design and testing of reduced-stiffness umbilicals for space station microgravity isolation. J. Spacecr. Rockets 2001, 38, 563–568. [Google Scholar] [CrossRef]
- Liu, W.; Wang, S.Q. Microgravity performance evaluation for zero gravity robot in China’s Space Station. IEEE Aerosp. Electron. Syst. Mag. 2022, 37, 32–42. [Google Scholar] [CrossRef]
- Zhou, J.X.; Wang, Z.G.; Li, W.; Liu, L.; Deng, Y.F.; Zhao, Q. Modeling and pointing performance analysis of disturbance-free-payload system with flexible umbilical connection. IEEE Access 2019, 7, 109585–109596. [Google Scholar] [CrossRef]
- Yang, H.J.; Liu, L.; Liu, Y.; Li, X.G. Modeling and micro-vibration control of flexible cable for disturbance-free payload spacecraft. Microgravity Sci. Technol. 2021, 33, 46. [Google Scholar] [CrossRef]
- Pugh, G.E. Proposal for a satellite test of the coriolis predictions of general relativity. In Nonlinear Gravitodynamics: The Lense-Thirring Effect; Ruffini, R., Sigismondi, C., Eds.; World Scientific: Singapore, 2003; pp. 414–426. [Google Scholar]
- Hu, M.; Li, H.Y.; Zhou, Z.B. Drag-free control technology and its applications. Manned Spacefl. 2013, 19, 61–69. [Google Scholar] [CrossRef]
- Zanoni, C. Drag-Free Spacecraft Technologies: Criticalities in the Initialization of Geodesic Motion. Ph.D. Thesis, University of Trento, Trento, Italy, 2015. [Google Scholar]
- Liu, W.; Gao, Y. Drag-free control methods for space-based gravitational-wave detection. Sci. Sin. Phys. Mech. Astron. 2020, 50, 079503. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Installation Position | Function | |
|---|---|---|---|
| Sensor | 2D-PSDs | Between the PM and the SM | Measure the position and orientation of the PM with respect to the SM |
| Capacitive sensors | Between the TM and the SM | Measure the position and orientation of the TM with respect to the SM | |
| Star sensors | On the SM | Measure the orientation of the SM with respect to the inertial space | |
| Actuator | Electromagnetic actuators | Between the PM and the SM | Generate forces and torques acting on the PM and the SM |
| Electrostatic actuators | Between the TM and the SM | Generate forces and torques acting on the TM and the SM | |
| Thrusters | On the SM | Generate forces acting on the SM | |
| Flywheels | On the SM | Generate torques acting on the SM | |
| Name | Mass (kg) | Inertia (kg.m2) | Size (m) |
|---|---|---|---|
| PM | 50 | 0.8 × 0.8 × 0.5 | |
| SM | 100 | 1 × 1 × 0.6 | |
| TM | 2 | 0.046 × 0.046 × 0.046 |
| Name | Value | |
|---|---|---|
| Vibration isolation control loop | Position controller | |
| Attitude controller | ||
| Drag-free control loop | Position controller | |
| Attitude controller | ||
| Attitude-pointing control loop | Attitude controller | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, T.; Kang, G.; Cai, J.; Jia, S.; Yang, J.; Zhang, X.; Zhang, Z.; Li, L.; Liu, F. Integrated Control Scheme for an Improved Disturbance-Free Payload Spacecraft. Aerospace 2022, 9, 571. https://doi.org/10.3390/aerospace9100571
Jin T, Kang G, Cai J, Jia S, Yang J, Zhang X, Zhang Z, Li L, Liu F. Integrated Control Scheme for an Improved Disturbance-Free Payload Spacecraft. Aerospace. 2022; 9(10):571. https://doi.org/10.3390/aerospace9100571
Chicago/Turabian StyleJin, Ting, Guohua Kang, Jian Cai, Shaoxia Jia, Jinghua Yang, Xinghua Zhang, Zhenhua Zhang, Long Li, and Fangfang Liu. 2022. "Integrated Control Scheme for an Improved Disturbance-Free Payload Spacecraft" Aerospace 9, no. 10: 571. https://doi.org/10.3390/aerospace9100571
APA StyleJin, T., Kang, G., Cai, J., Jia, S., Yang, J., Zhang, X., Zhang, Z., Li, L., & Liu, F. (2022). Integrated Control Scheme for an Improved Disturbance-Free Payload Spacecraft. Aerospace, 9(10), 571. https://doi.org/10.3390/aerospace9100571