1. Introduction
Recent years have seen a wave of renewed interest in space activities from the public. In contrast to that of the early days of space exploration, where developments were primarily undertaken by governmental institutions, this new interest is marked by the involvement of private actors and investors. Some reports indicate that the space economy will triple within a decade to attain a projected market value of
$1.4 trillion USD [
1]. The new opportunities linked to space activities have in turn pushed launch services providers into a fierce competition with the aim of reducing development, manufacturing, and operation costs. The sector, traditionally dominated by six space-faring nations, has seen the appearance of more than one hundred micro-launcher projects targeting the smallsat demand from the commercial market [
2].
The preliminary design of a launch vehicle system involves multiple subsystems in which several engineering disciplines work together. Subjects such as acoustics, aerodynamics, heat-transfer, control, structures, and trajectory come into play in a strong and mostly non-linear coupling. This forces the preliminary design to be an iterative process, which needs adequate predictive models for each of the intervening subsystems. The choice of model comes as a compromise between accuracy and evaluation cost. For instance, existing analytical and semi-empirical models have a small evaluation cost but are penalized in accuracy. In contrast, high-fidelity numerical simulations may provide accurate representations for a large computing cost.
The rocket engine remains a crucial component where semi-empirical correlations continue to be used, to the great detriment of accuracy, thereby leading to over-engineering, increased reliance in testing, and eventually higher costs. This is due to the complex phenomena taking place in the liquid rocket engine (LRE) combustion chamber. The multiscale nature of combustion and turbulence makes intractable the use of high-fidelity numerical simulations in the preliminary design of the engine, which are reserved for detailed engineering. Therefore, it is common practice in the rocket design process to use low-order models, often based on semi-empirical correlations of experimental data, to circumvent the conundrum of expensive numerical models [
3]
An alternative is to use surrogate models, also referred to as metamodels, which are built up on the basis of data obtained from simulations and/or experiments and aim to provide fast approximations of target functions and constraints at a new design point [
4,
5,
6]. This is typically carried out at a cost which is orders of magnitude below the cost of a new computational experiment. Due to their potential for industry applications, several methodologies and techniques to build surrogate models have been documented in the literature.
Historically, the multiple ways to build surrogate models have been split into three major groups [
5,
7]: multifidelity models, reduced order models (ROMs), and data-fit models. The first ones are obtained by downgrading high-fidelity models to a lower fidelity. Simpler techniques, such as coarser grids, reduced accuracy order, less restrictive tolerances, and simplified physics, are used to this end. Finally, corrections are performed on the low-fidelity model based on the data provided from the high-fidelity samples.
The projection-based model reduction techniques are of paramount importance for building surrogate models and are at the core of ROMs. The projection bases are obtained via compression techniques applied on data drawn from high-fidelity samples. Among the most commonly cited are spectral methods such as snapshot-based proper orthogonal decomposition (POD), principal component analysis (PCA), and singular value decomposition (SVD); or greedy algorithms. Even though the aforementioned techniques imply the projection into a linear subspace [
8,
9], there also exist non-linear dimensionality reduction methods, known as
manifold learning [
10], which are intended to address the shortcomings of linear procedures. Deep Learning
autoencoders are one example, allowing one to learn coordinates on a curved manifold and hence providing excellent compression capabilities [
11]. These
autoenconders are made of an
encoder which maps a high-dimensional state
to the latent state
[
12,
13,
14,
15]. The reverse operation which returns the estimate
is carried out by the decoder. Other non-linear dimensionality reduction methods rely on the hypothesis that the data are present on some low-dimensional, nonlinear manifold, such as a Grassmanian or a diffusion manifold [
10].
Once a low-dimensional manifold is rendered from a compression technique, different approaches may be adopted. For instance, projection-based ROMs work by projecting the governing physical equations into the constructed reduced manifold. Projected equations are thus solved in the reduced subspace, and solutions in the physical coordinate system are recovered a posteriori. The efficacy of these models has been reported across several studies, even in aerospace propulsion applications [
16,
17,
18,
19]. A major pitfall of projection-based ROMs relies on the fact that they are highly intrusive, as they require the reformulation of associated PDEs in the low-dimensional manifold. Therefore, they require the re-implementation of existing codes, which increases cost to stakeholders and may not even be possible due to intellectual property barriers. Additionally, projection-based ROMs present several issues for highly non-linear problems, as they struggle with accuracy incrementing the order of the projected manifold and hence harming the speed increase they yield [
9].
Another strategy lies in the use of data-fit methods in the low-dimensional manifold or latent state. In such fashion, purely data-driven non-intrusive ROMs are obtained. Several examples of developments on this area are found in the literature, i.e., [
7,
13,
14,
15,
20,
21]. Some have already been applied in the emulation of injectors flows. For instance, Wang et al. [
8] utilized a common kernel-smoothed POD and Kriging to emulate with promising accuracy the flow dynamics in a simple swirl injector and mixing and combustion in a gas-centered liquid-swirl coaxial injector. Mondal et al. [
22] combined DL
autoencoders for effective dimensionality reduction in combination with DL neural networks for the flow-field reconstruction of automotive injectors. Milan et al. [
23] elaborated a database of LES of automotive injectors to study the accuracy of snapshot-based POD and DL
autoencoders in representing the flow in a reduced low-dimensional space.
The data-fit methods include polynomial chaos expansions [
10], response surface methods [
24,
25], Gaussian processes (also known as Kriging), and radial basis functions. These methods work purely on data drawn from the high-fidelity samples, making them attractive for situations where projection-based ROMs are too complicated to implement. Their main conundrum is that they suffer from the curse of dimensionality when dealing with high-dimensional data, which hinders their applicability with light datasets.
Another collection of methods for surrogate modeling has gained traction based on the exclusive use of deep neural networks (DNN). These methods have long ago caught the attention of the fluid mechanics community for their ability to perform in regression problems [
26]. Note that in the realm of deep learning (DL), surrogate models may be physics-informed or purely data-driven. The former is not addressed in the reminder of this work, although the reader may refer to [
27] for greater insight. The latter is the reference avenue taken in the present work due to its inherent non-intrusiveness and recent developments within the fluid mechanics field.
Farimani et al. [
28] used conditional generative adversarial networks (cGAN) to build data-driven models of steady-state heat conduction and incompressible fluid flows with mean average error (MAE) < 1%. Guo et al. [
29] used convolutional neural networks (CNNs) to build generalized surrogates to predict external 2D-laminar flows from the lattice Boltzmann method (LBM) CFD simulations. Their analysis included testing the method in different geometrical shapes and encoding architectures with speedups of up to 12,000 when using GPU-accelerated CNN compared to a traditional LBM solver in a single-core CPU. White et al. [
9] approached the issue of developing deep-learning surrogate models from tiny datasets through their ClusterNetwork with promising results based on CFD laboratory-scale numerical experiments. However, their applicability to high-dimensional, industry-related design optimization has not yet been explored. Zhang et al. [
30] tested various CNN architectures to predict the lift coefficient in a variety of airfoils, with AeroCNN-II being the first of its kind to investigate 2D aerodynamic problems involving diverse flow conditions and sectional shapes. Thuerey et al. [
31] studied the accuracy of deep-learning models for the inference of the flow around airfoils on Cartesian grids while using a modernized U-Net architecture. They report predicting the pressure and velocity distribution with an error of less than 3% in unforeseen geometries. Furthermore, Kim et al. [
32] presented a novel supervised deep-learning generative model,
Deep Fluids, which is capable of producing realistic time-advancing parametric fluid simulations. Their method provides plausible interpolation in between with large speed-ups allowing, applications in games and virtual environments. However, issues associated with the sparsity of the training dataset are detected, highlighting the large data requirements of such methods. Krügener et al. [
33] used a combination of fully connected neural networks (FCNN) and a variant of the aforementioned U-Net from Thuerey et al. [
31] as surrogate models to predict sets of key-performance-indicators (KPIs), wall heat flux, and the temperature 2D-field on a single-element, shear-coaxial injector rocket combustor. The models were trained on RANS data generated offline. Zapata Usandivaras et al. [
34] followed through by studying the behavior, performance, and applicability of these models.
It is thus clear that neural networks in fluid mechanics are already an established field of research [
26,
35]. The present work aimed to contribute to this field by studying the response of DL-based surrogate models of a GOx/methane, single-shear coaxial injector derived from large eddy simulations (LES). Models were obtained for scalar quantities of interest (QoIs) and also two-dimensional (2D) field maps. There were no specific novelties regarding the deep learning techniques utilized, and algorithms available of the shelf were used in this work. However, the novelty of this work relies on their application to the specific case of a shear-coaxial injector with high-fidelity numerical simulations, and their use in the interpretation of the relevant physical phenomena. While this widens the utility of such surrogate models for rocket engines (albeit the several axes of improvement remain to be studied), the large cost of 3D reactive LES brings new challenges, since surrogate models should be constructed from a reduced training database.
In the following, a short review on the influence of recessing the inner post of a coaxial injector is reported. Then, the methodology developed in the present work to obtain the surrogate models is described. Finally, the results of the models used to study the influence of the GOx post’s recess on the overall response of the injector are presented.
2. On Coaxial Injectors and Recess
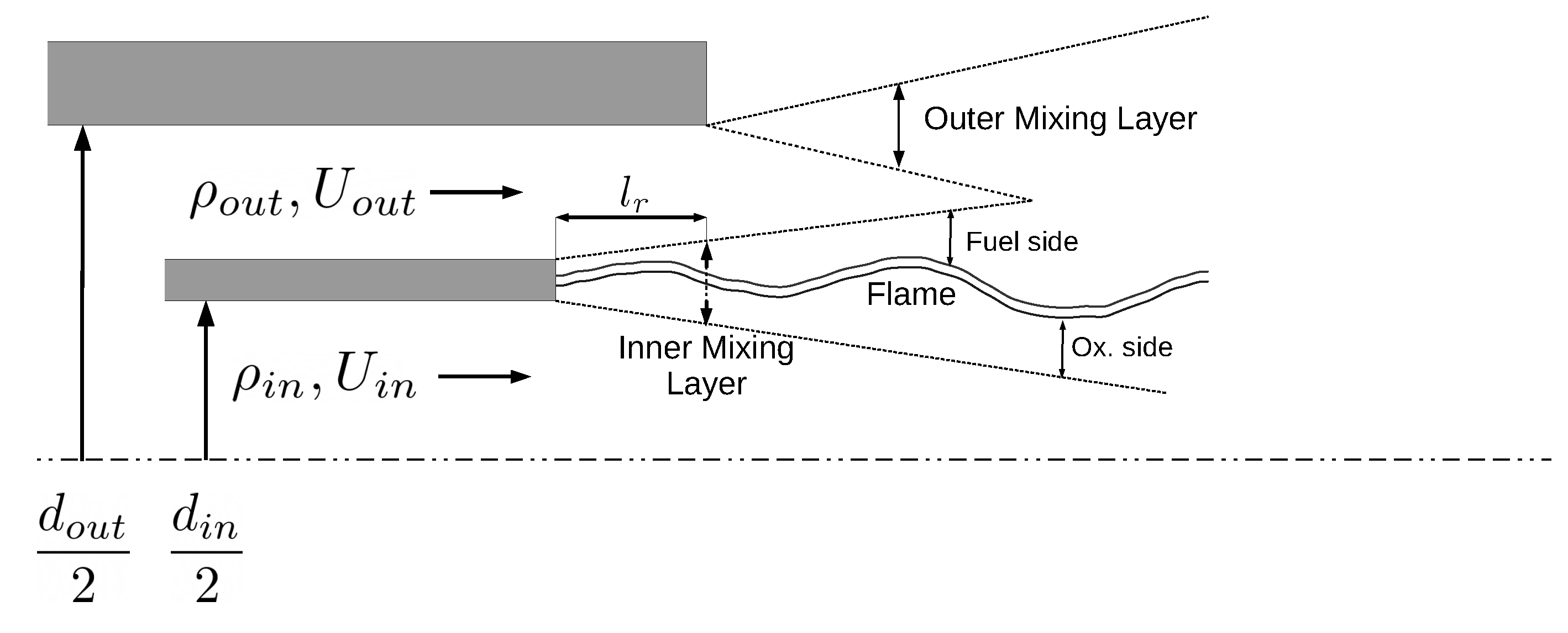
Shear-coaxial injectors are a recurrent design choice for liquid rocket engines. Cases such as the Vulcain II engine and SSME (Space Shuttle Main Engine) [
36] are well-known examples. In this type of injector, one propellant (typically the oxidizer) flows through a central tube, and the other (normally the fuel) through a concentric annulus. As both fluids are injected with different axial speeds, an inner-shear layer is formed once both fluids meet. An additional outer-layer is formed between the annular flow and the external environment of the jet. A schematic of the jet structure is shown in
Figure 1, where
is the density and
U the axial velocity component. For convenience, a flame sheet has been superimposed which helps identify an oxidizer side (when the central flow equates to the oxidizer stream) and a fuel side (when the annular flow equates to the fuel stream).
The good mixing qualities of coaxial injectors for liquid propellants have been attributed to the destabilizing aerodynamic forces which act on the central fluid which trigger the breakup of the liquid jet [
36]. However, it must be noted that the mechanisms which influence the mixing of the propellants are dependent on the propellant phases and their relative velocities. In such cases where both fluids are in super-critical conditions or gaseous, i.e., in a single phase, the turbulent mixing constitutes the driving mechanism.
For all fluids involved, a velocity ratio (
) larger than unity is desired;
where
and
subscripts refer to the inner and outer flows in the coaxial injector. In such cases, the near field of the coaxial jet is characterized by the appearance of hydrodynamic instability which grows, forming three-dimensional vortices, convected downstream by the mean flow. A direct consequence of this instability is thus the formation of interface corrugations which increase the contact area between both streams [
37]. This plays a primary role in the overall mixing and entrainment, and consequently heat-release due to increased wrinkling of the resulting diffusion flame. Furthermore, in these highly turbulent flows, the influence of molecular transport is only limited then to the smallest scales of motion and plays no direct role in the mixing rate [
38].
Several attempts have been made to enhance the performance of shear-coaxial injectors, either via inducing a swirling motion on the annular flow to induce the development of a transverse instability, or by recessing the central oxidizer post. In the latter case, a pre-reaction and mixing region inside the injection channel is used. Several studies have observed that by recessing the oxidizer post, the two-stream mixing is enhanced, hence leading to faster flame expansion, shortened flame-length, and greater combustion efficiency. Silvestri et al. [
39] carried out experiments on a single-element, shear-coaxial,
rocket combustor with optical access at varying mixture ratios (
) and recess lengths (
).
emission images showed for recessed configurations a conical flame shape in the near injection zone, linked to faster expansion, and a displacement upstream of the flame emission zone. In all cases, a larger recess was linked to greater injector pressure loss, in both fuel and oxidizer streams. Additionally, analysis of the wall heat flux and combustion efficiency showed an increase in both for recessed injectors.
Lux and Haidn [
40] performed experiments on a
single-element combustor for different values of LOx post’s recess length at sub-, near-, and supercritical conditions.
emission images show, similarly to [
39], when increasing recess, that the emission intensity starts at a higher level shortly behind the methane injection nut, meaning a higher axial gradient of the flame envelope. In all operating conditions, dependency of jet diameter on the momentum flux ratio (
J) was reported:
Combustion roughness was observed to decrease; however, strong hydrodynamic instabilities were observed on the surface of the LOx jet.
Kendrick et al. [
41] performed similar studies on a single-element, shear-coaxial
rocket combustor. Overall, similar flame behavior was observed. The enhanced mixing and earlier break-up of the central LOx core was attributed to the development of the flame inside the injector in the recessed configuration, which caused a premature expansion of the gases and consequently accelerated the gaseous
flow, increasing the effective momentum–flux ratio. Finally, Juniper and Candel [
42] studied the stability of two-dimensional wake-like ducted compound flow. They demonstrated that recessing the central tube of a coaxial injector leads to self-sustained wake-like instabilities of the central stream.
6. Conclusions
Competition in the launch services sector is projected to increase considerably in the coming years. There is a strong drive from different stakeholders to decrease development, manufacturing, and operation costs. High-fidelity simulations of rocket engine combustion have become a relevant tool in everyday engineering and are one of the key enabling technologies to continue driving costs down. Regardless, to this date and with contemporary computing architectures, there still are several challenges associated with their computational costs. Data-driven surrogate models provide a temporal alternative to circumvent these issues.
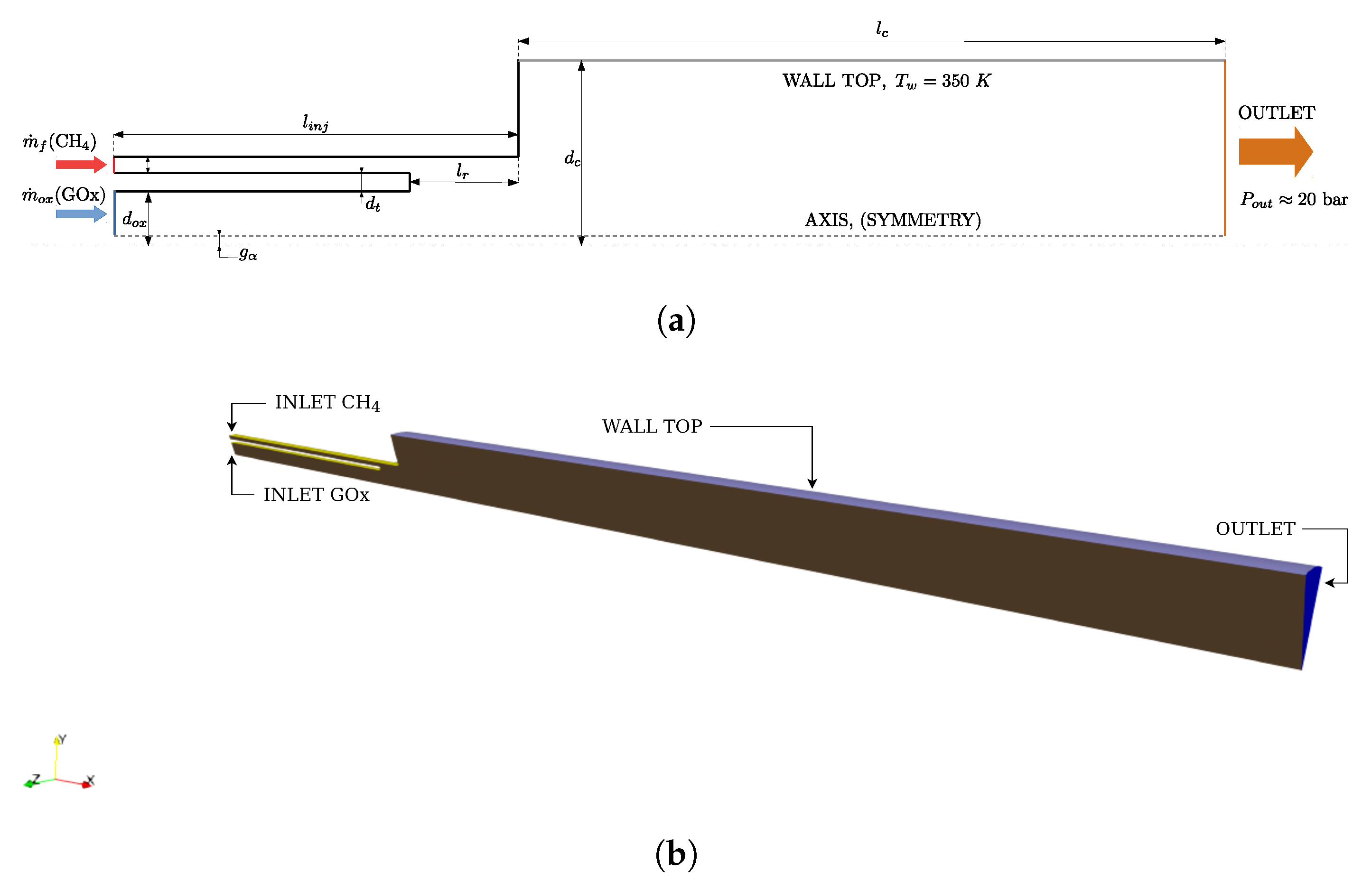
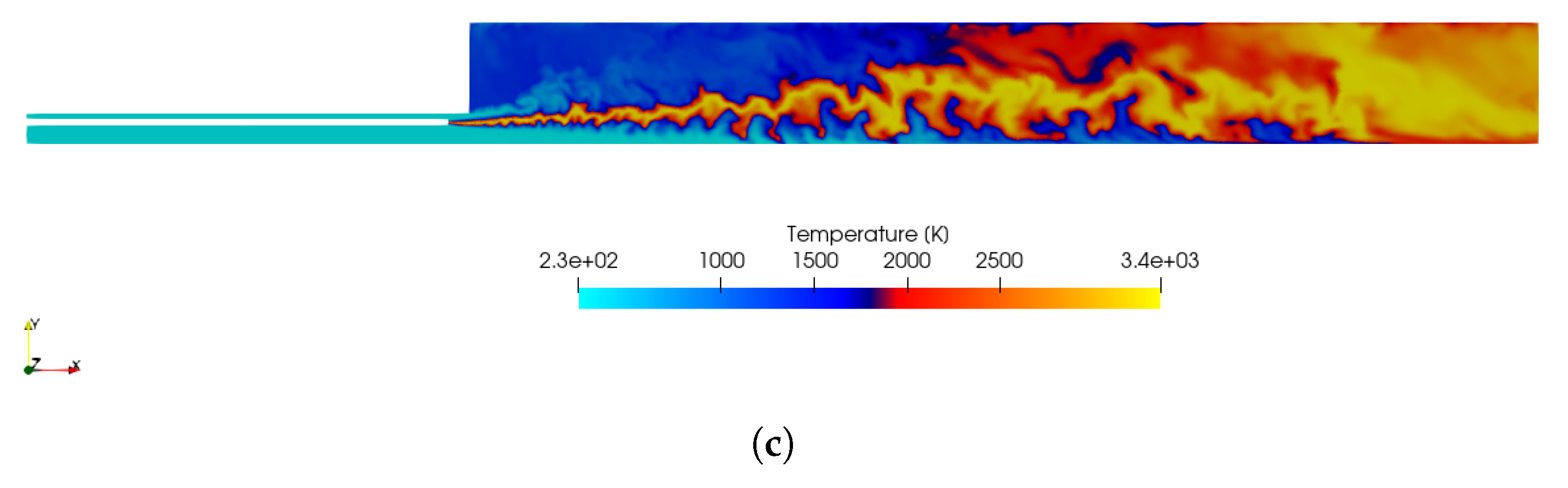
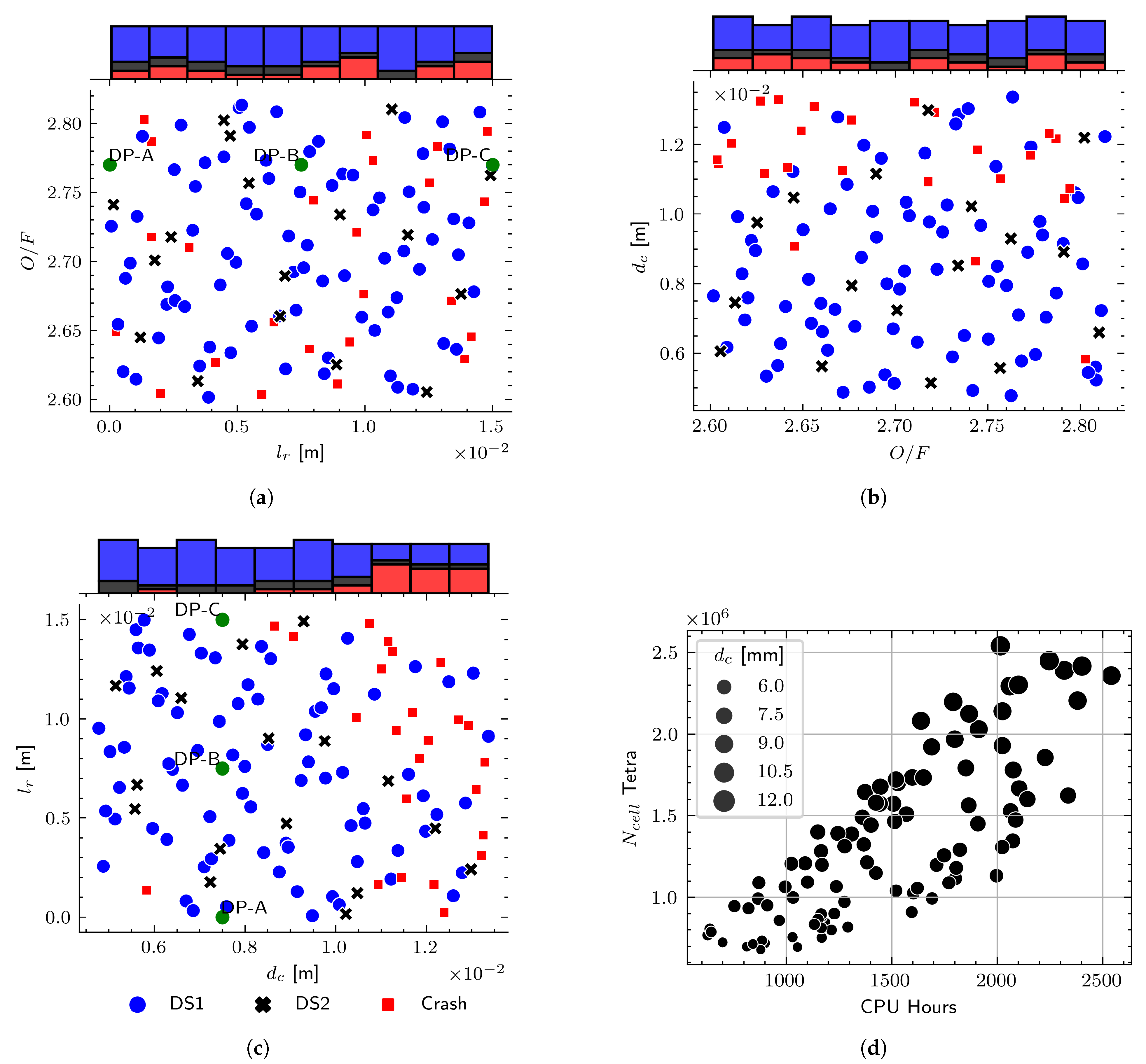
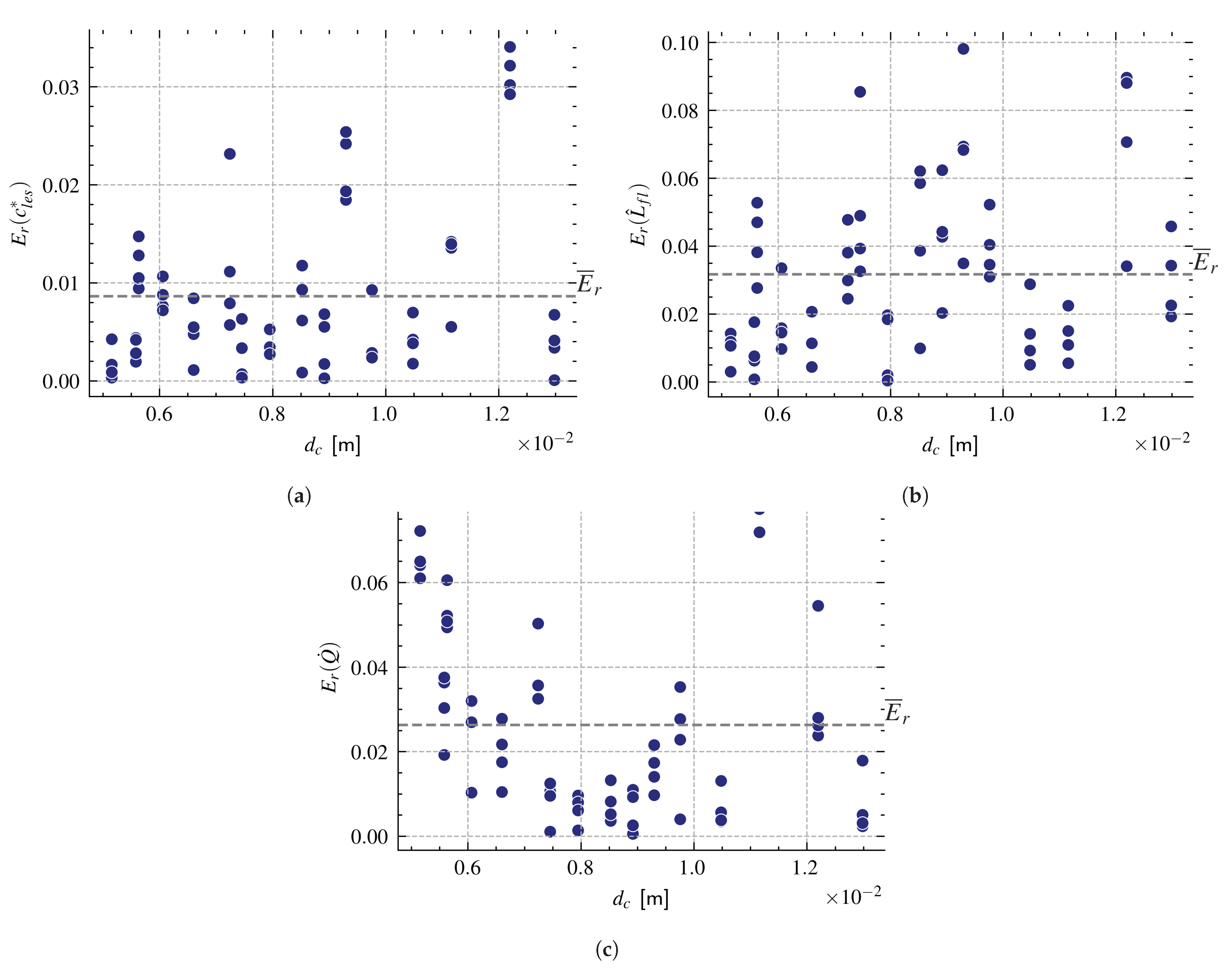
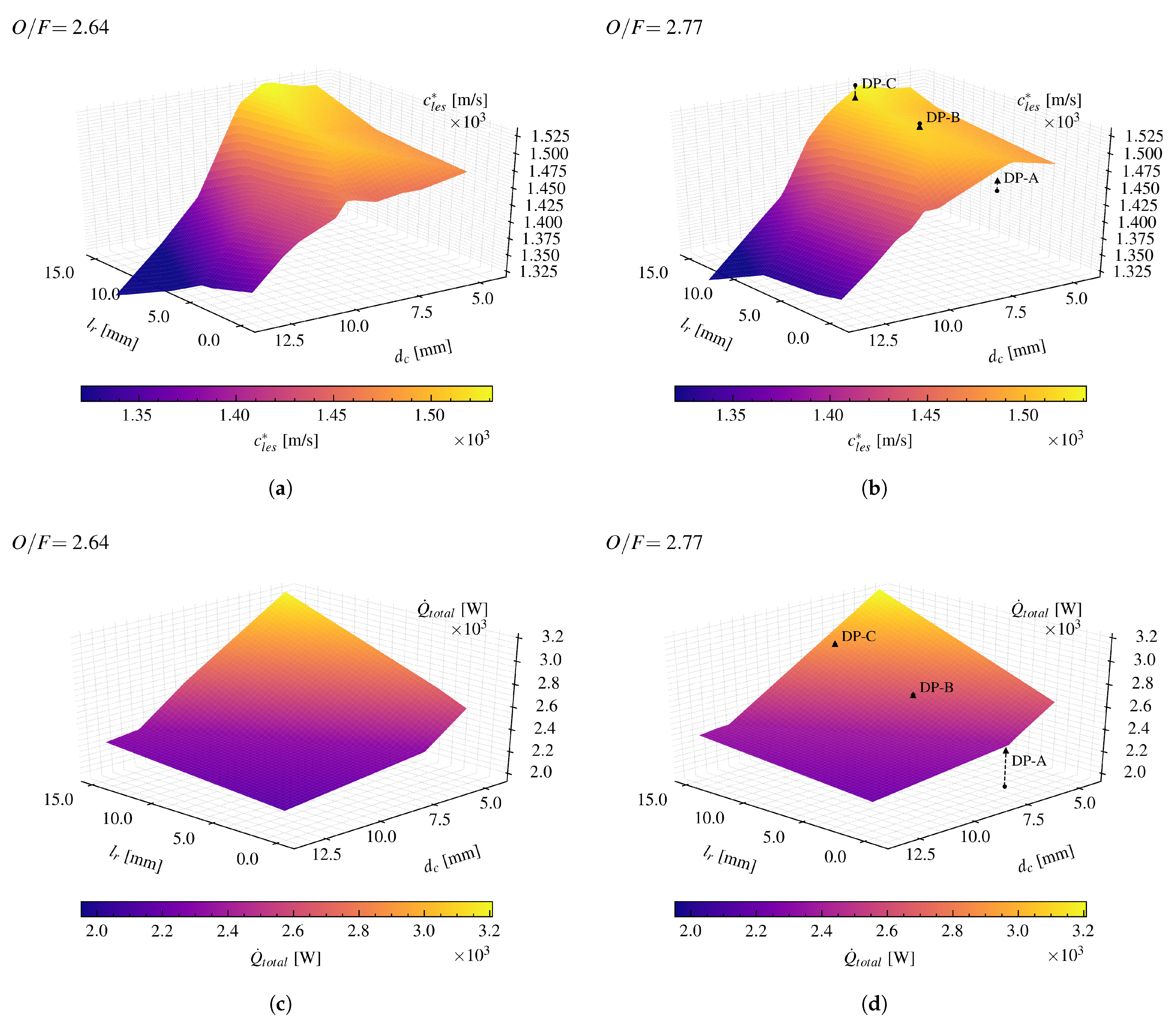
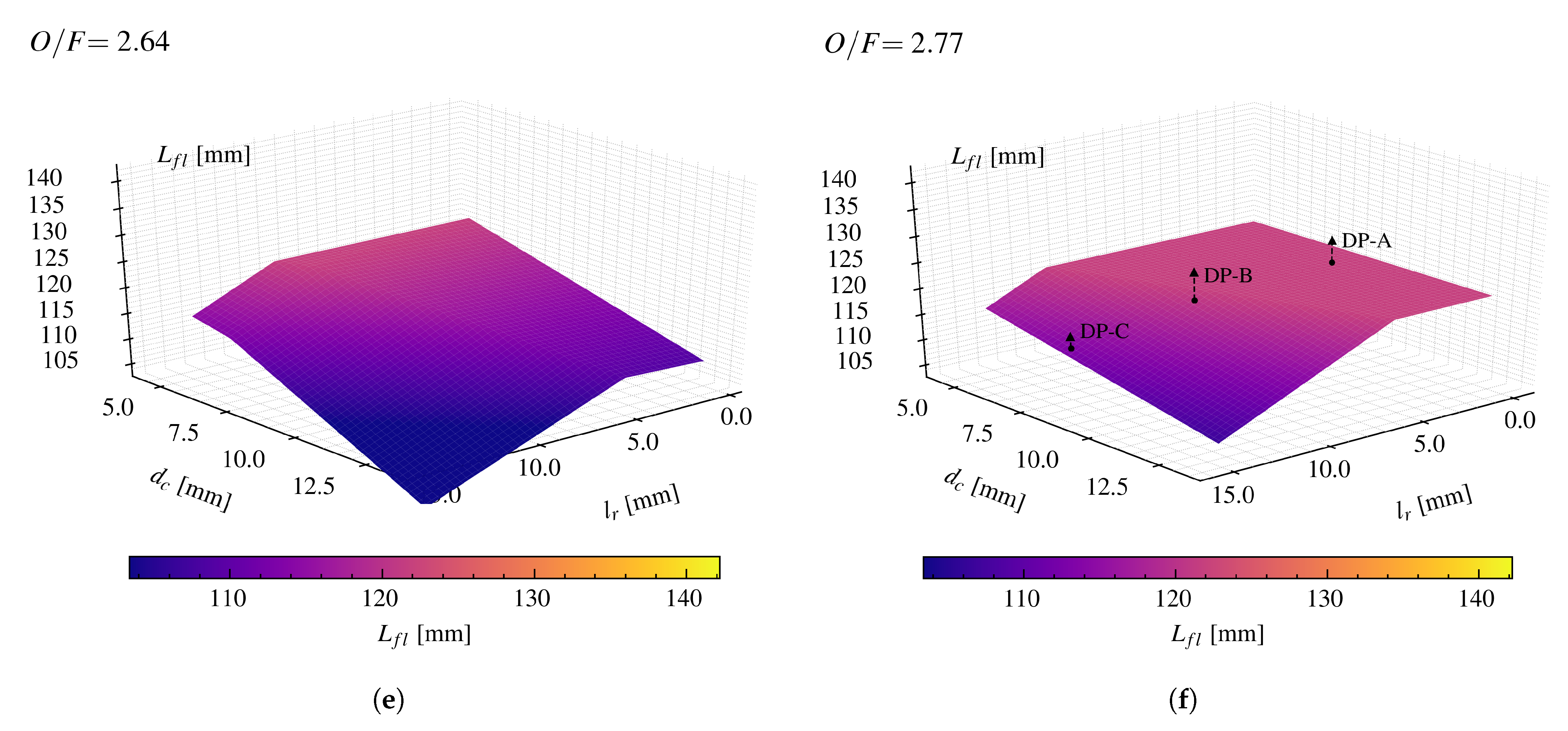
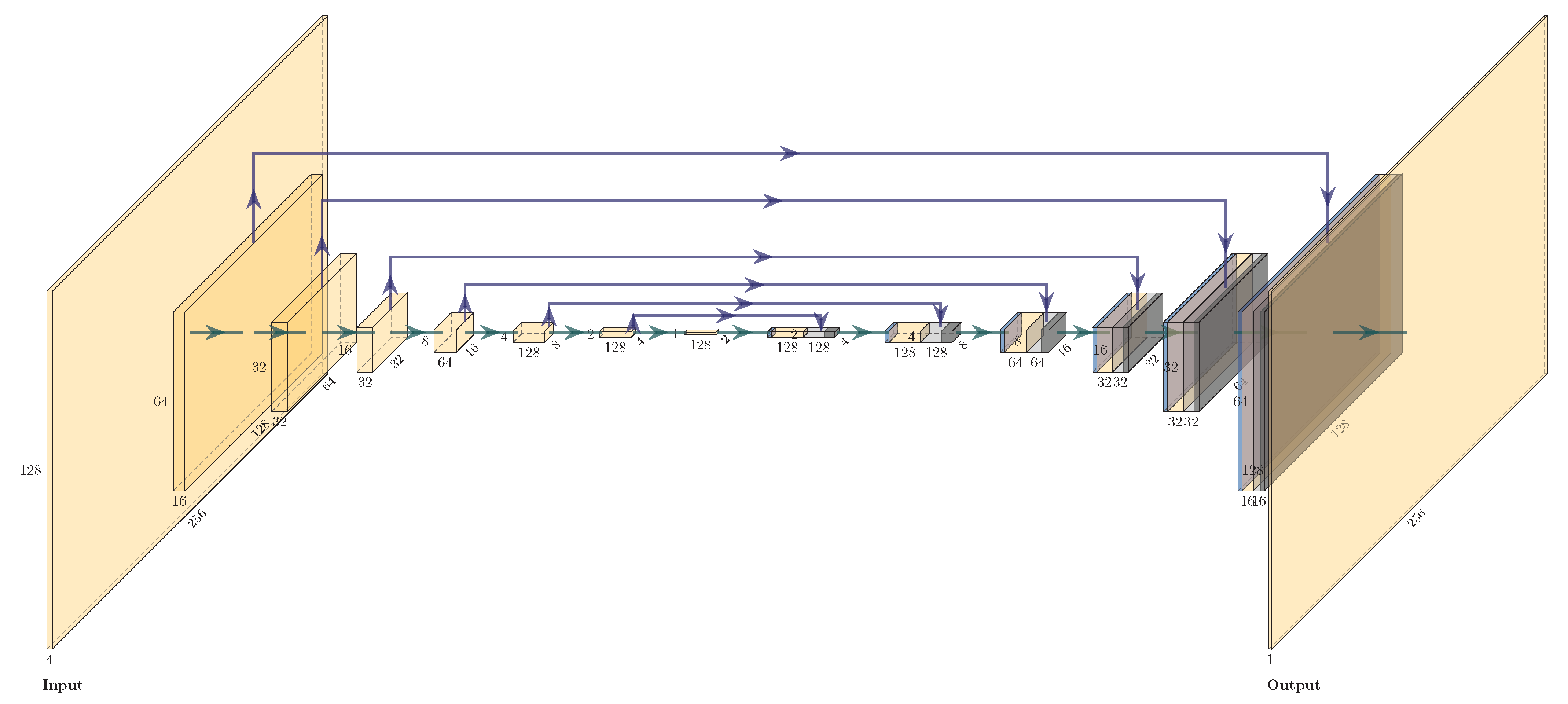
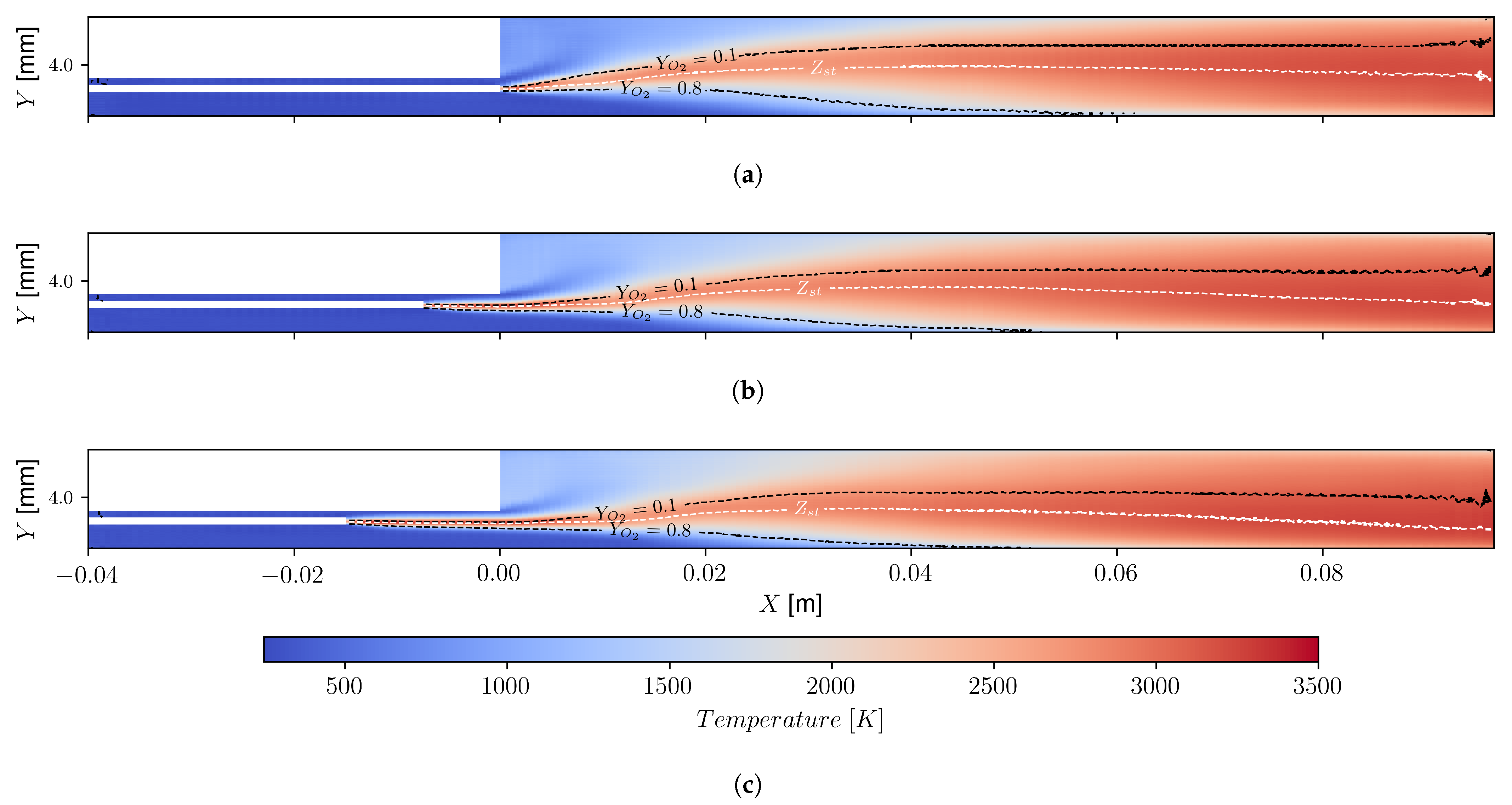
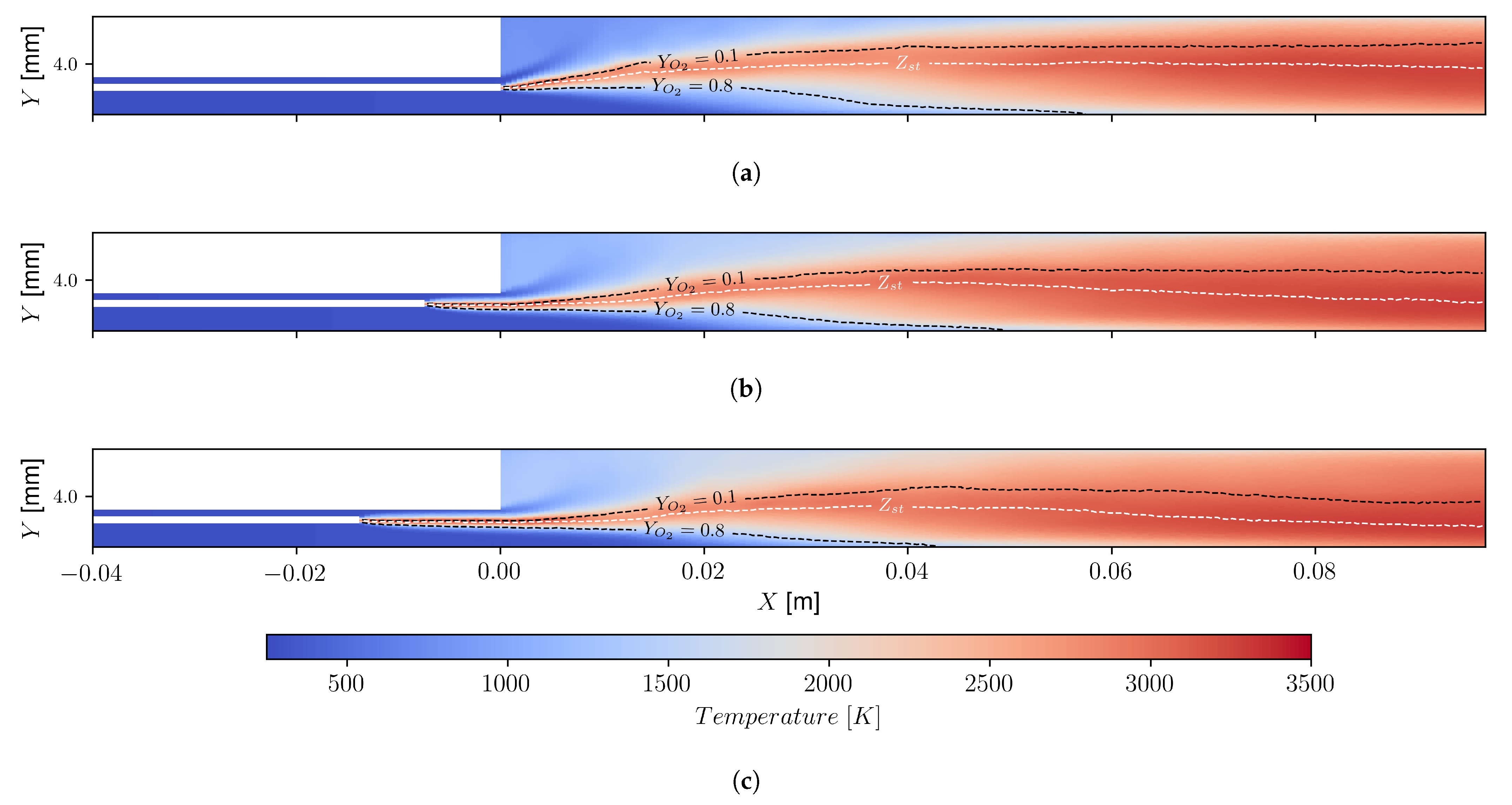
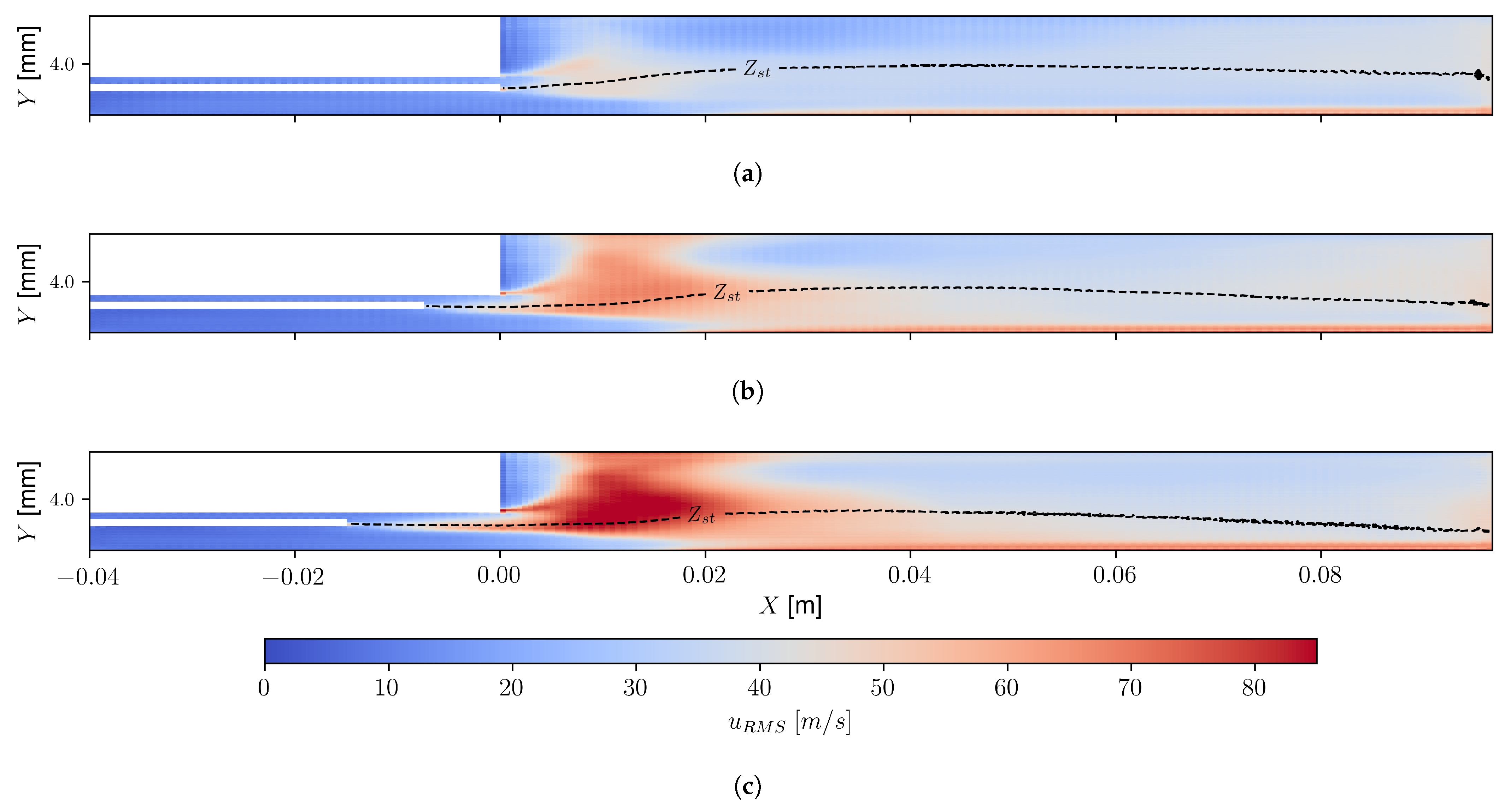
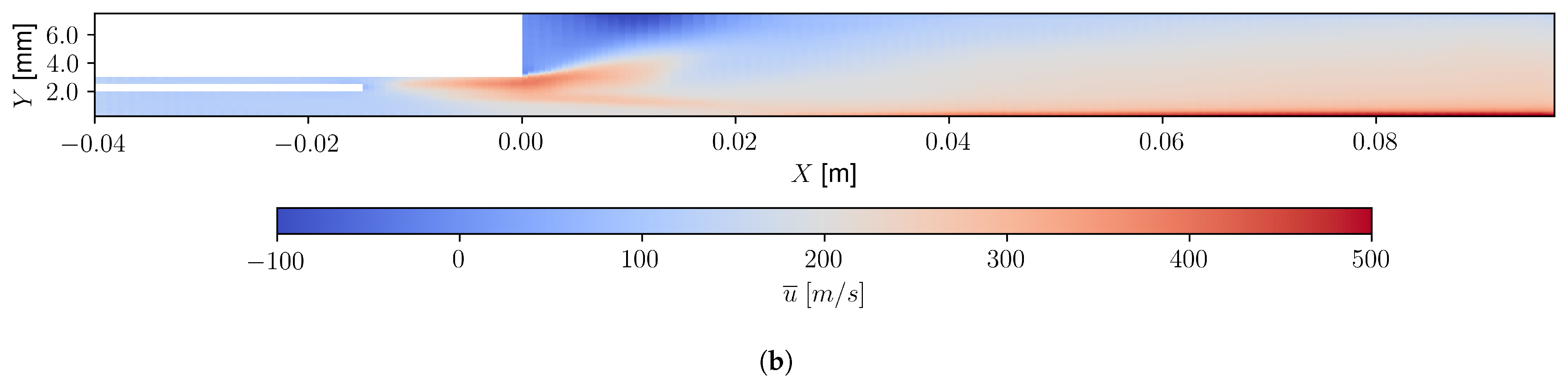
In the current work, the evolution of global quantities has been studied through the use of deep learning (DL)-based surrogate models. These quantities are the injectors’ characteristic velocity of the gases in the combustion chamber (), the total wall heat-flux (), and the approximate flame or combustion length (). For such purposes, a database of LES simulations was built with AVBP by sampling a three-dimensional design-space. The axes considered were: the mixture ratio (), the oxidizer post’s recess length (), and the chamber radius (). Furthermore, a methodology for deriving two-dimensional surrogate models of field quantities of interest has been put in place. The ultimate objective of these models is to provide interpretability to the behavior of the global quantities model over the design space. Surrogate models for the time-averaged temperature field (), velocity-u field (), oxygen mass fraction field (), mixture-fraction field (), and velocity-u root mean-squared field () were obtained by means of U-Nets and isolated network hyperparameter optimization. The predictions given by these models give estimates of a longitudinal cut of the three-dimensional solution in a Cartesian grid. These networks have shown acceptable predictive performances in terms of the average test dataset’s relative and normalized errors.
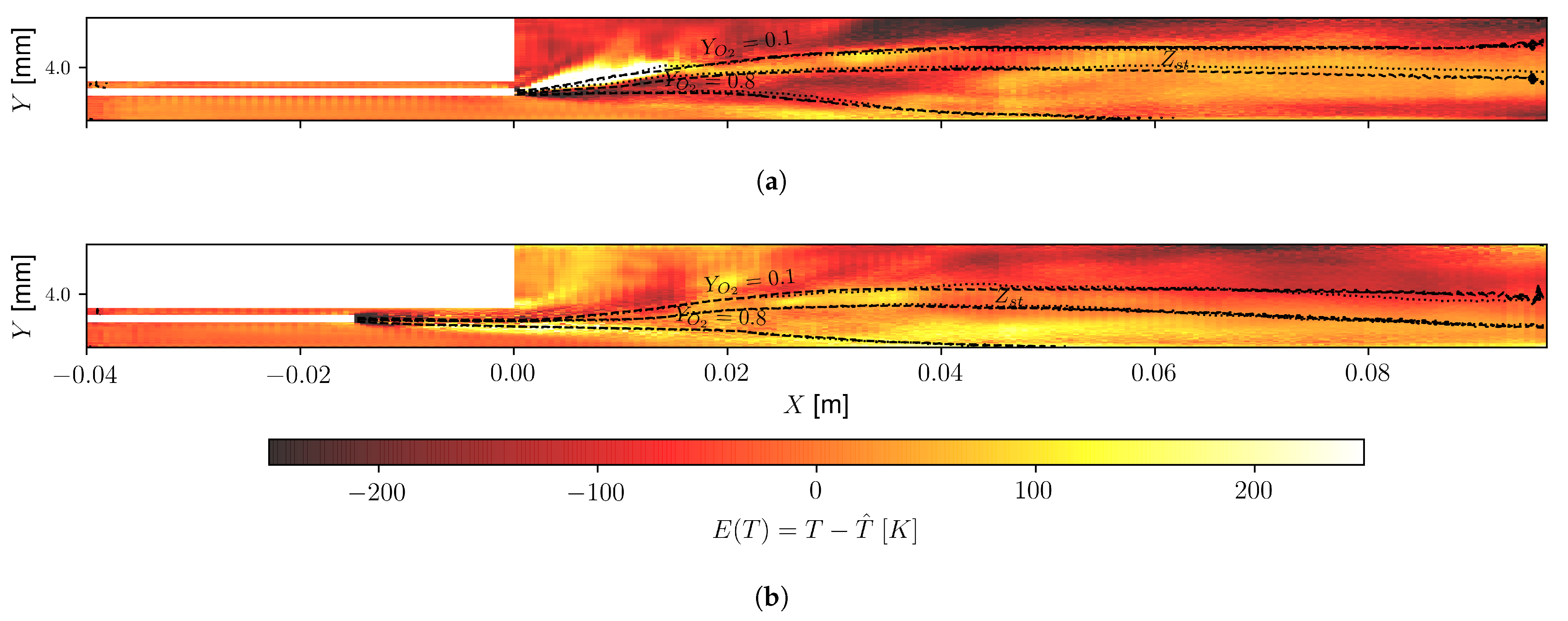
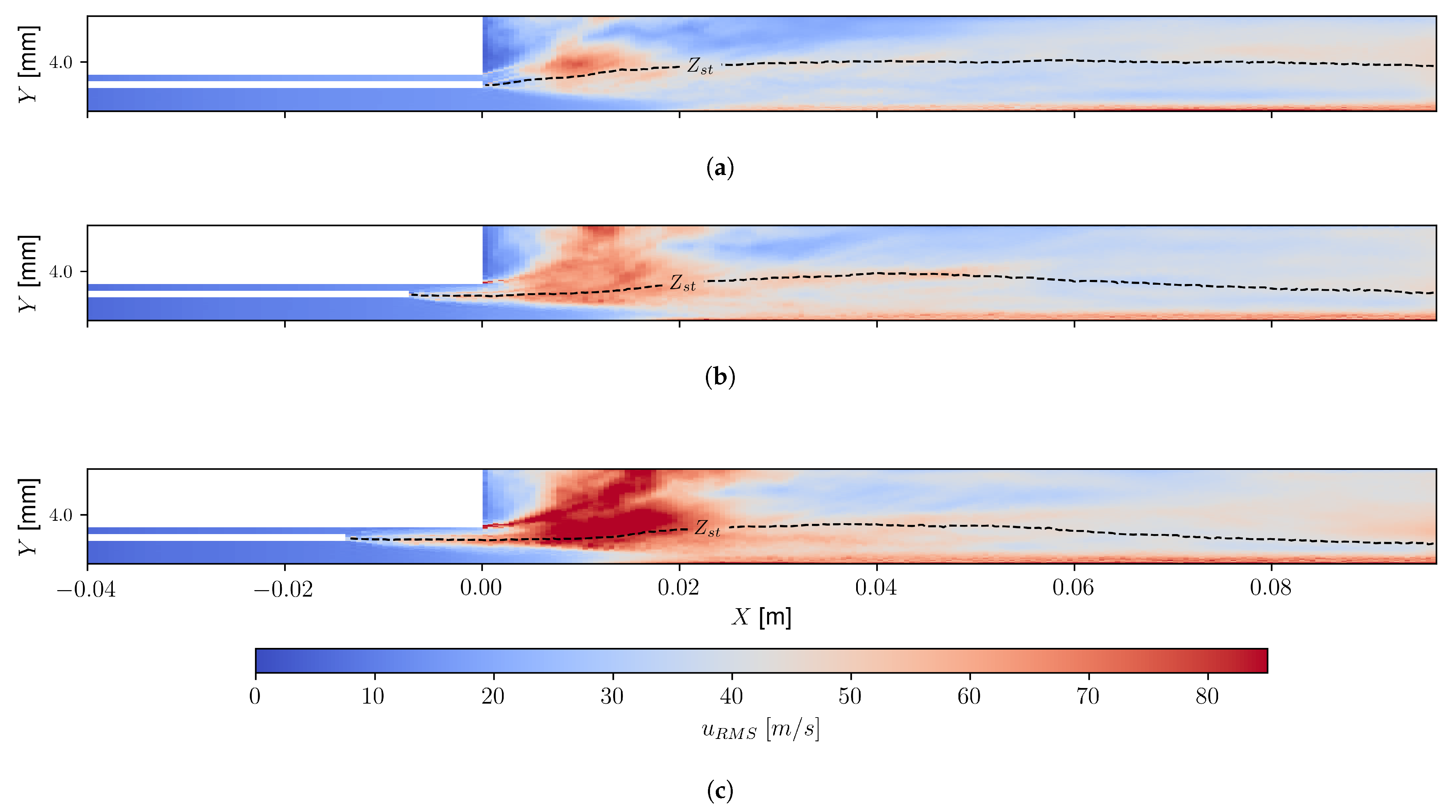
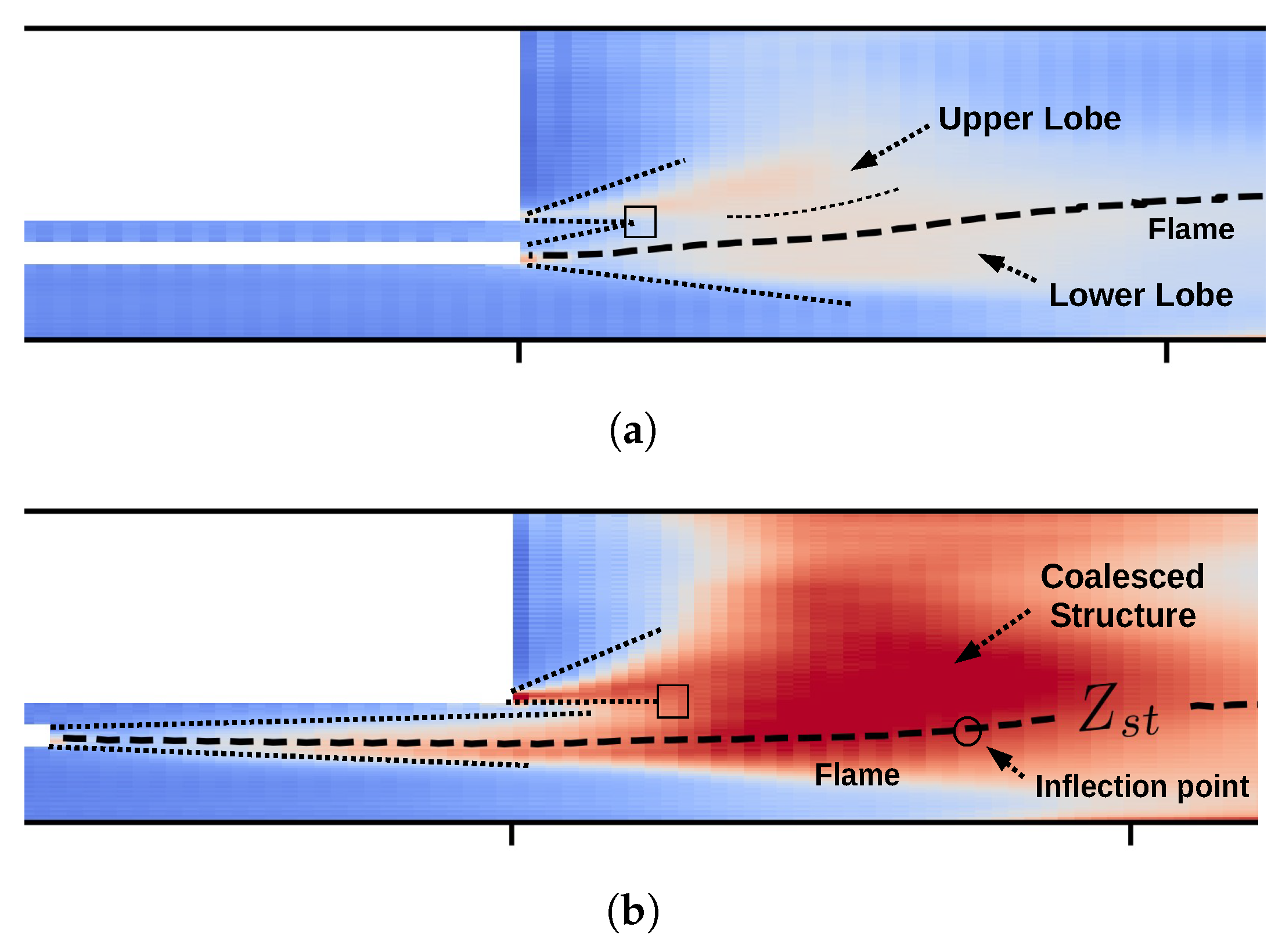
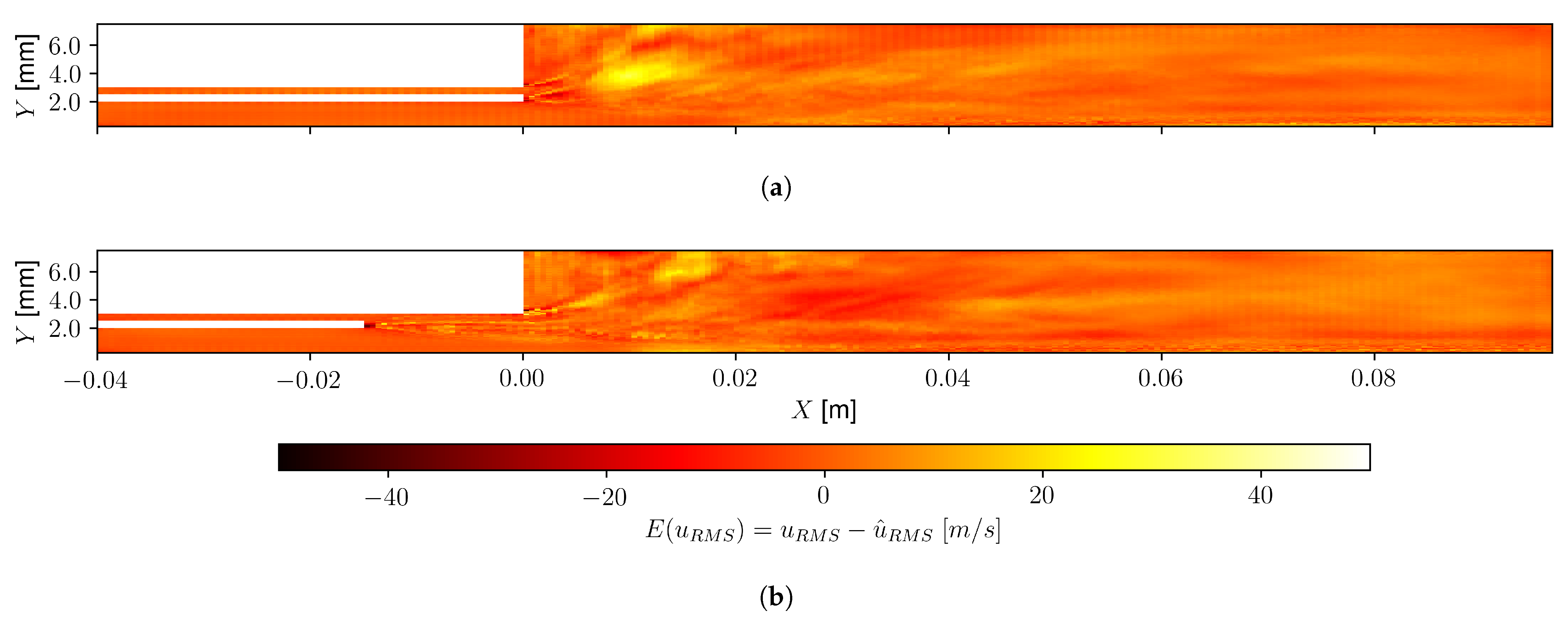
Special interest has been placed on the influences of the recess length on the considered quantities. Making use of the surrogate models to navigate the design space, we see that recessing the oxidizer post leads to an increase in . It was observed from the analysis U-Nets’ outputs of different injector design points that higher temperatures are present in the recirculation zone, which is linked to a faster expansion of flame, a phenomenon that has been experimentally observed. Moreover, oxygen mass fraction iso-lines and the stoichiometric lines are displaced upstream with increasing values of recess, thereby hinting at a faster consumption rate. The topology of the error field shows good agreement for the temperature field, the oxygen mass fraction, and mixture fraction iso-lines. The larges differences can be observed in the vicinity of the stretched flame, where high gradients are also present. The analysis of the root mean squared (RMS) of velocity-u fluctuations shows a strong reaction to recess, with a clear increase in the fluctuations’ intensity in the vicinity of the flame sheet. The surrogate models resolve well most of the relevant structures of the field; however, detailed analysis of the error fields indicate that some are missing for the design points reviewed.
Finally, projected future works intend to continue the focus on the development of DL-based surrogate models to include the wall heat-flux profile and to improve the predictive performances of the field quantities models. Benchmarking against other DL-based data-driven techniques such as GNNs and MLPs is envisioned. The major conundrum lies in the elevated costs per sample for LES, which renders efforts to increase the fidelity or size of the database extremely expensive. Thus, subsequent efforts will be performed in order to increase the sampling efficacy.


 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}