
Dynamic Modeling and Analysis of Thrust Reverser Mechanism Considering Clearance Joints and Flexible Component


Abstract
:1. Introduction
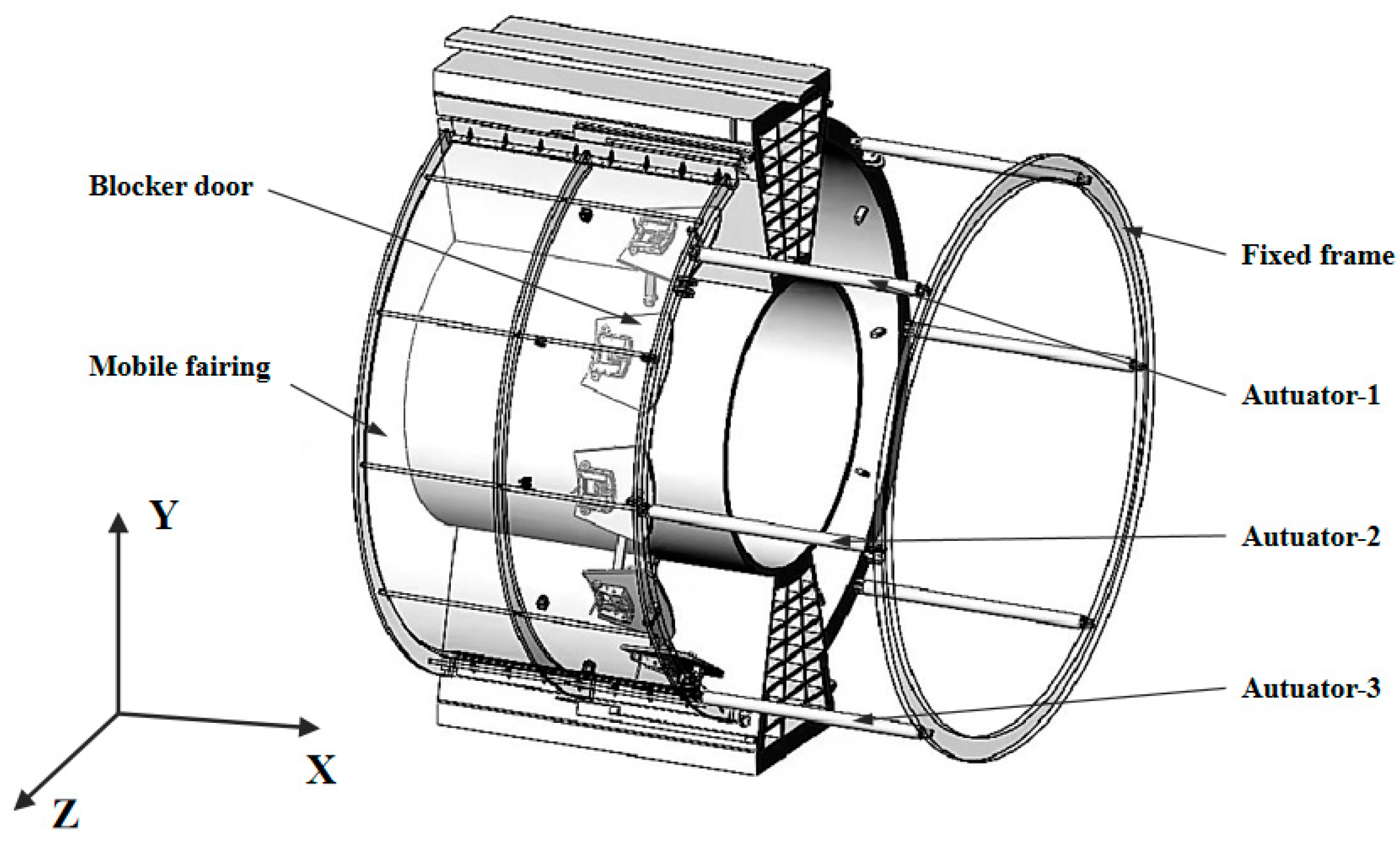
2. Thrust Reverser Mechanism
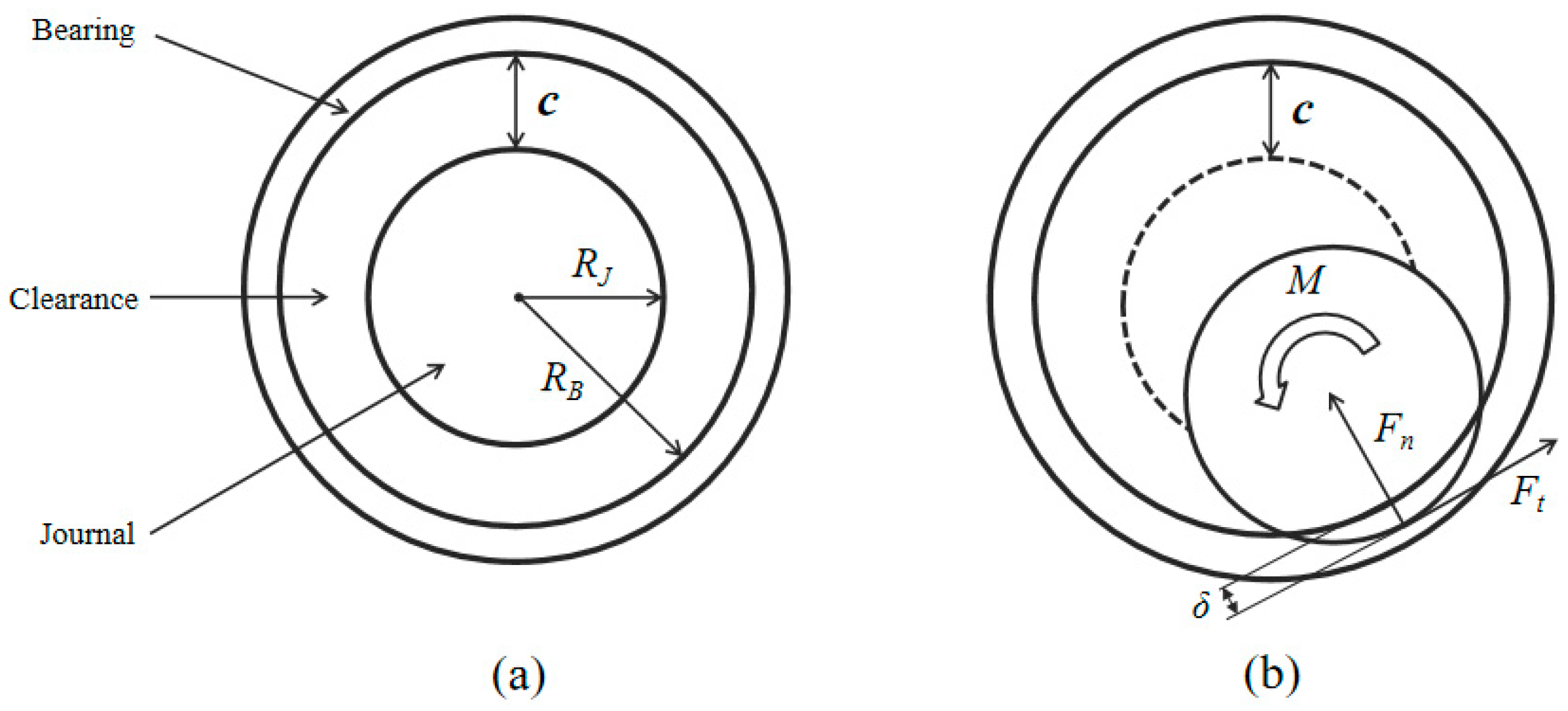
3. Modeling of Revolute Joint with Clearance
3.1. Normal Contact Force Model
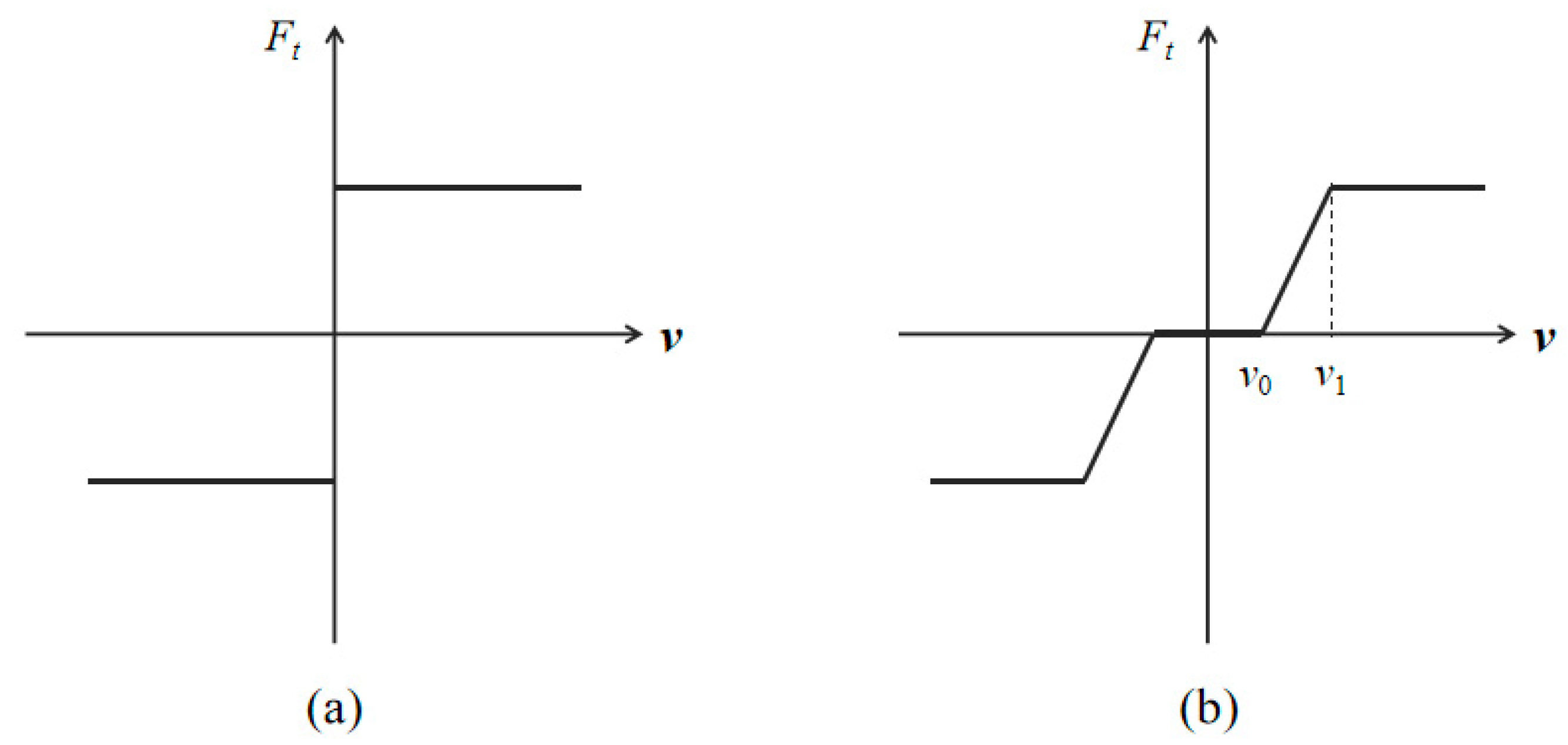
3.2. Tangential Friction Force Model
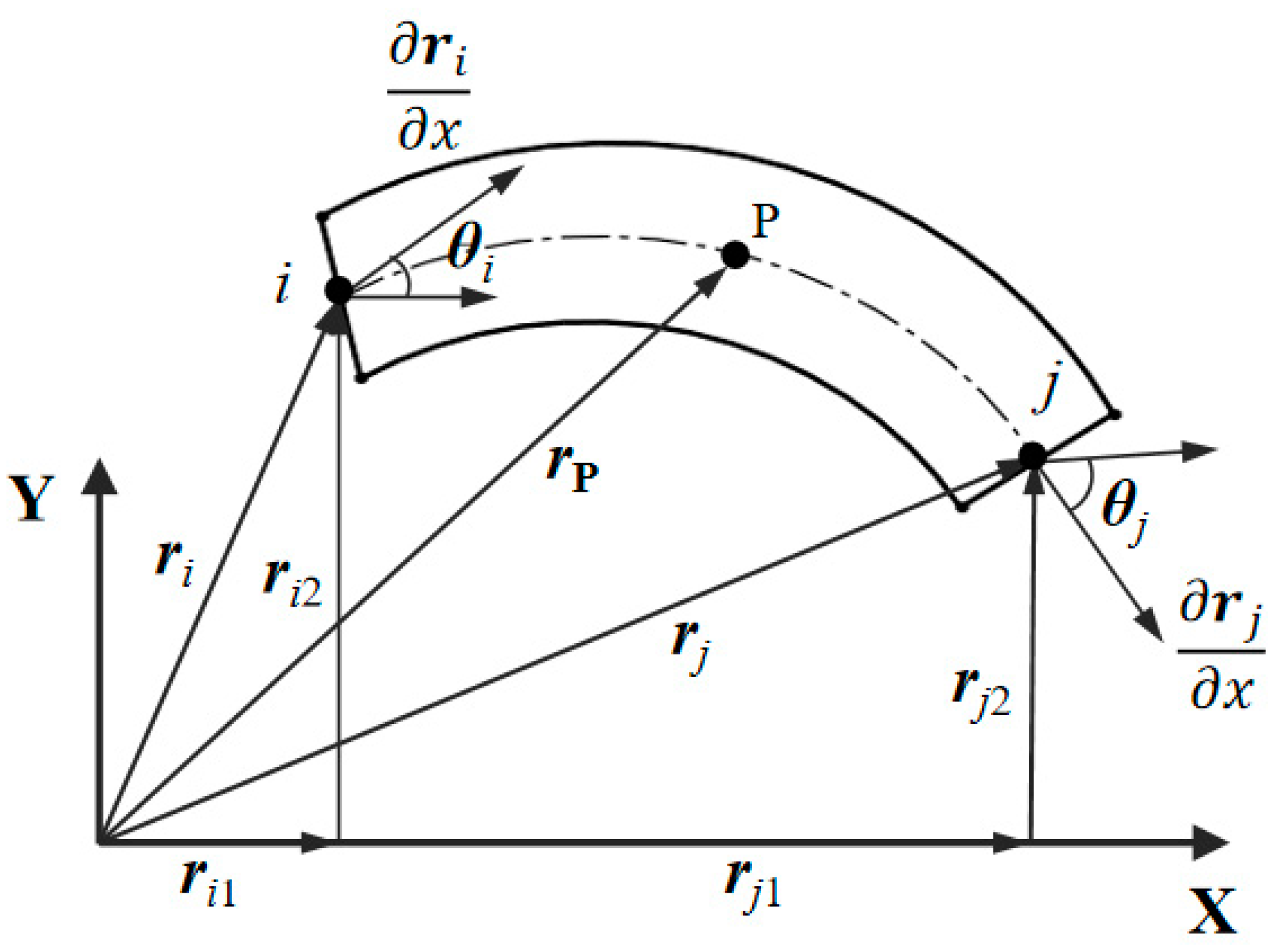
4. Modeling of Revolute Joint with Clearance
5. Dynamic Equation of Rigid-Flexible Coupling Mechanism with Joint Clearance
6. Calculation and Parameters
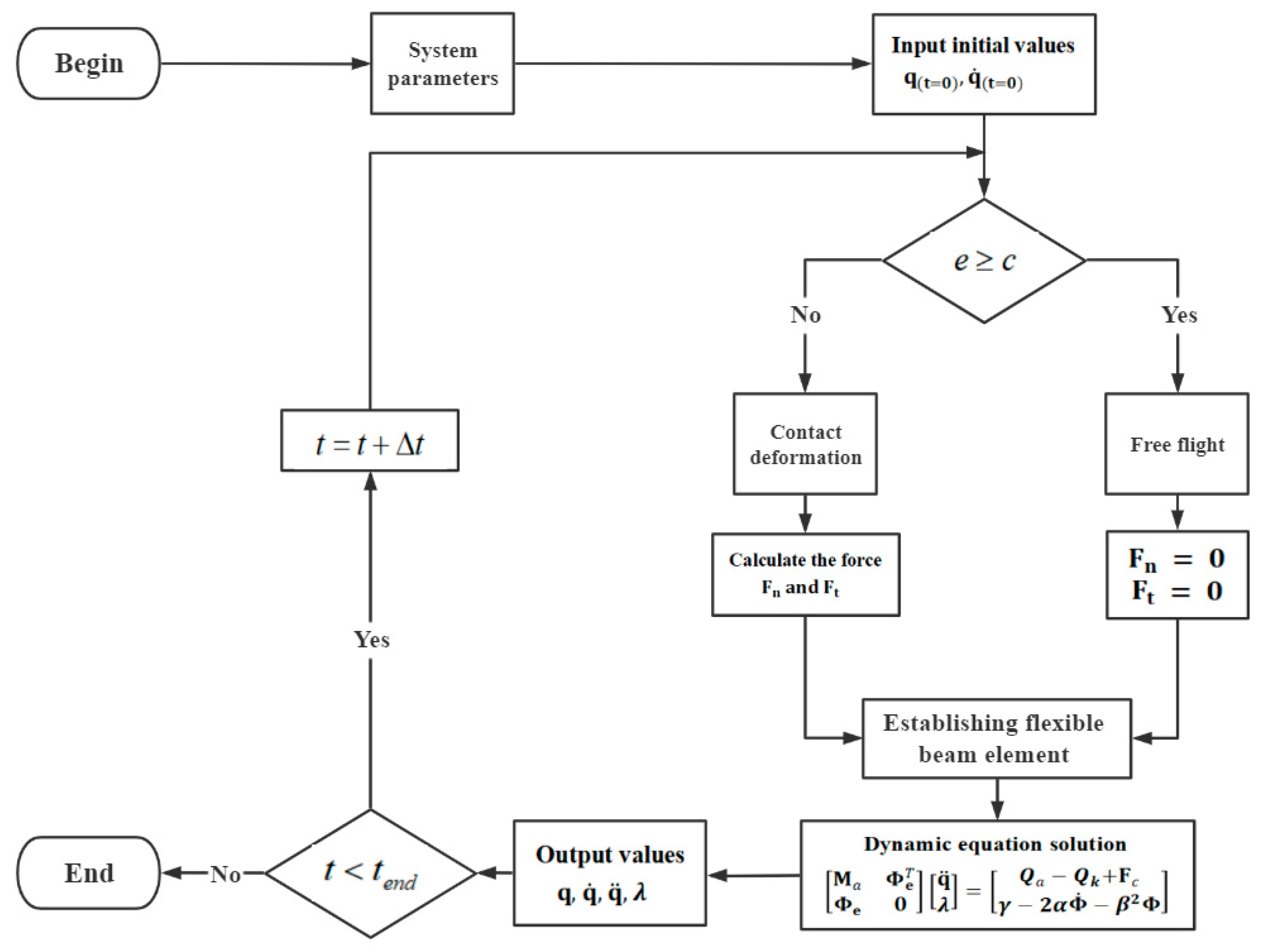
6.1. Solution Process of Dynamic Equation
6.2. Model Validation
6.3. Mechanism Simulation Parameters
7. Results and Discussion
7.1. Dynamic Response Analysis of the Mechanism
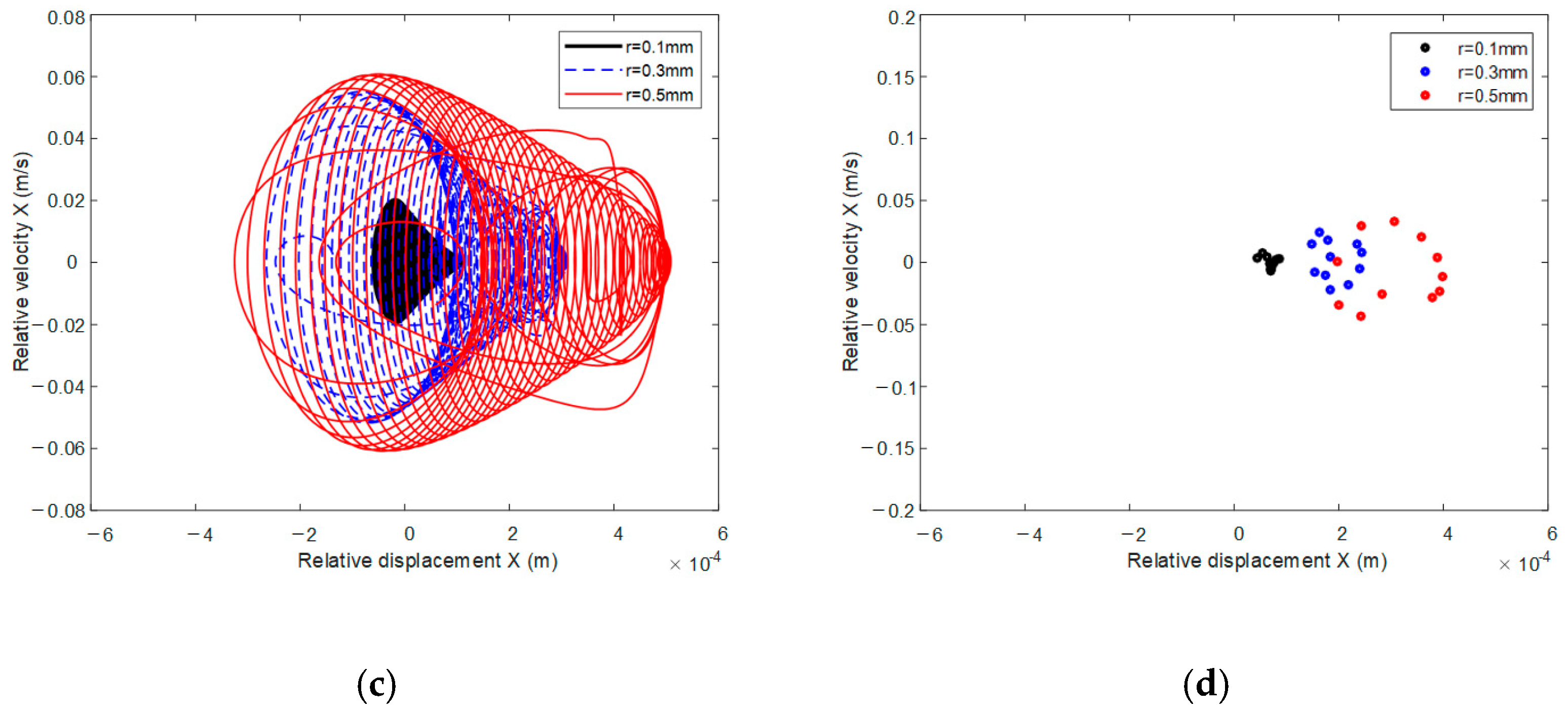
7.1.1. Effect of Clearance Value
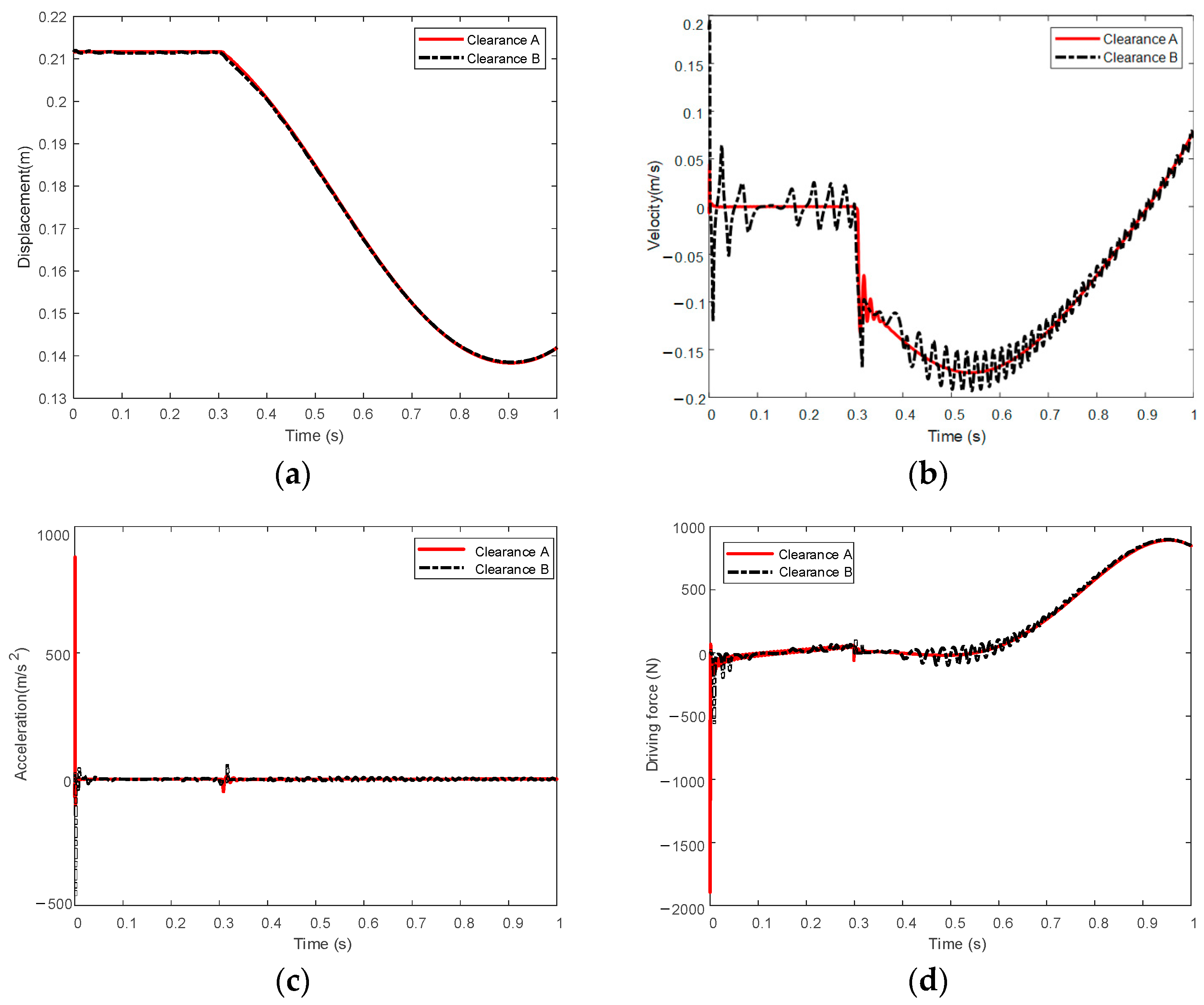
7.1.2. Effect of the Positions of Clearance Joint
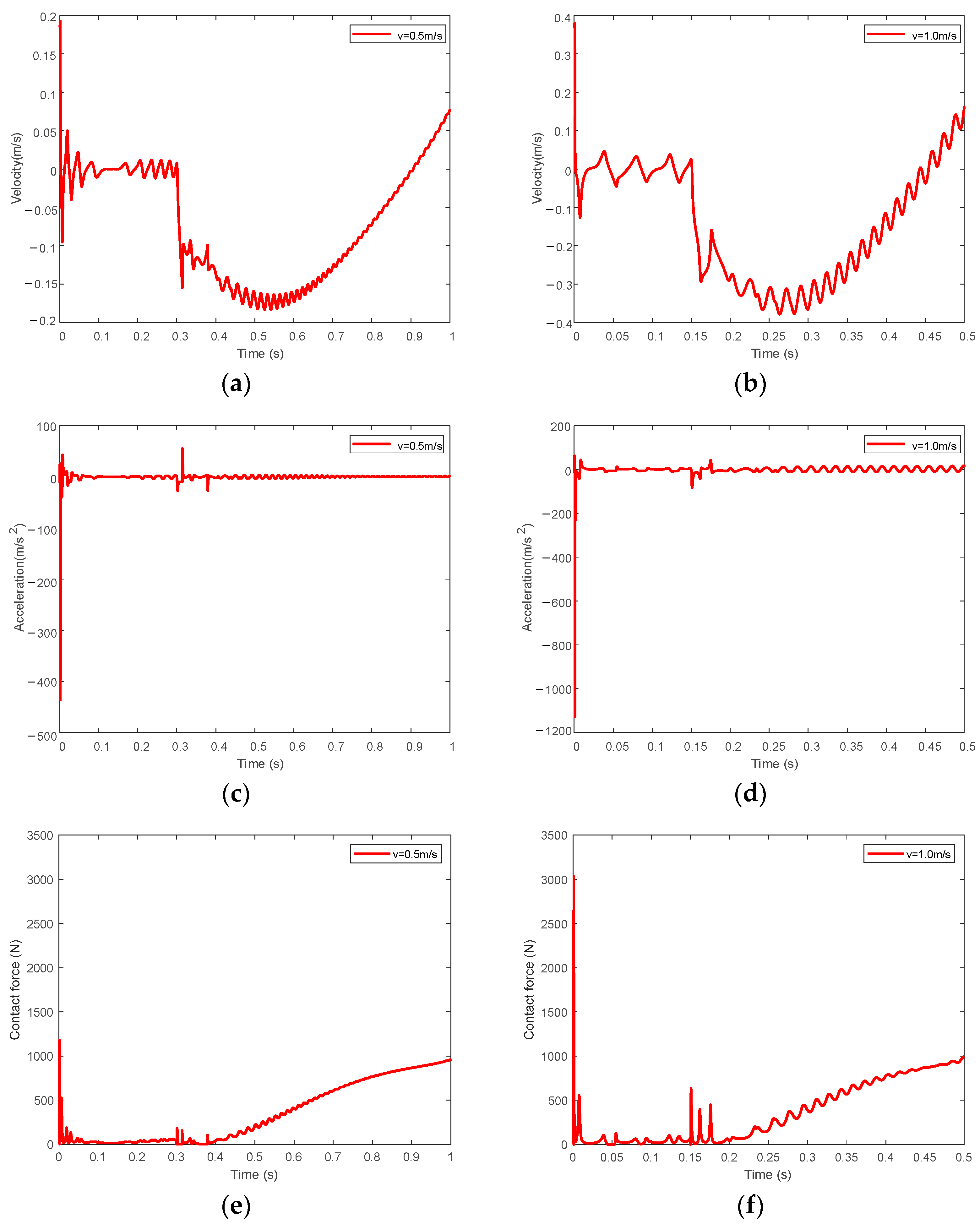
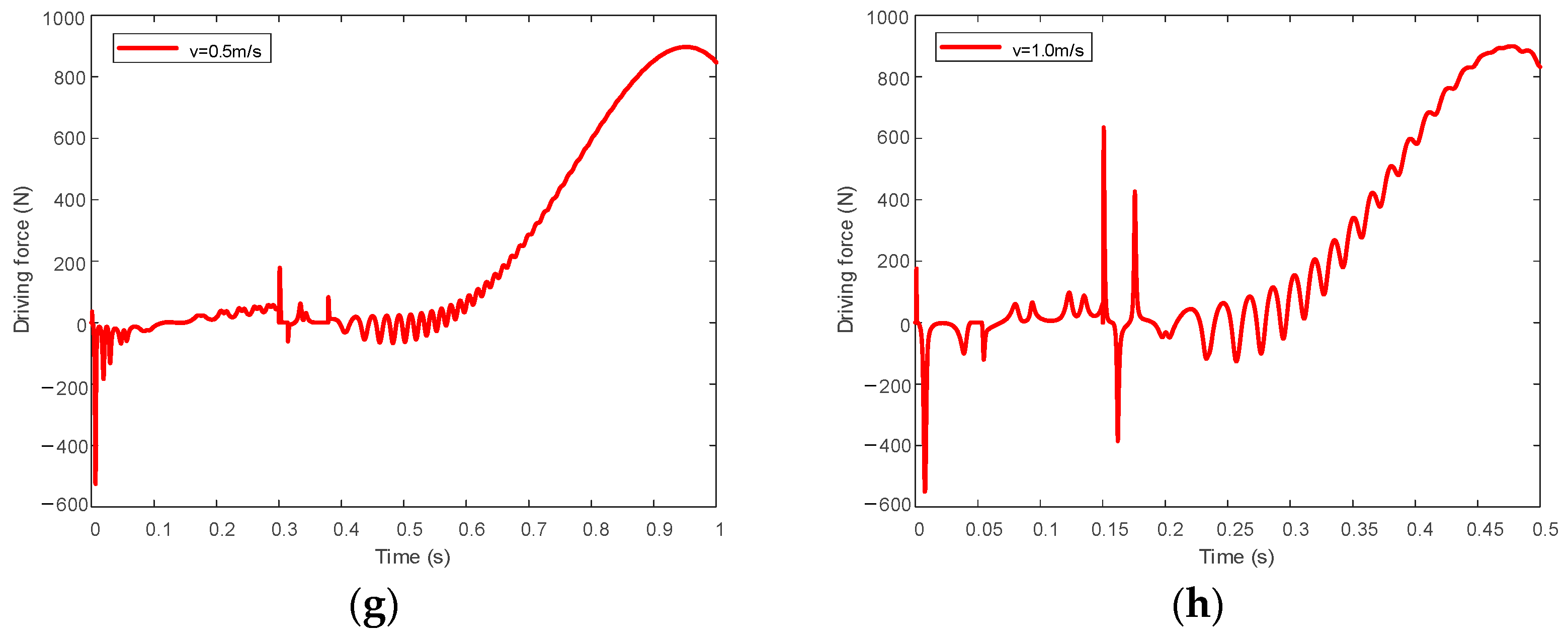
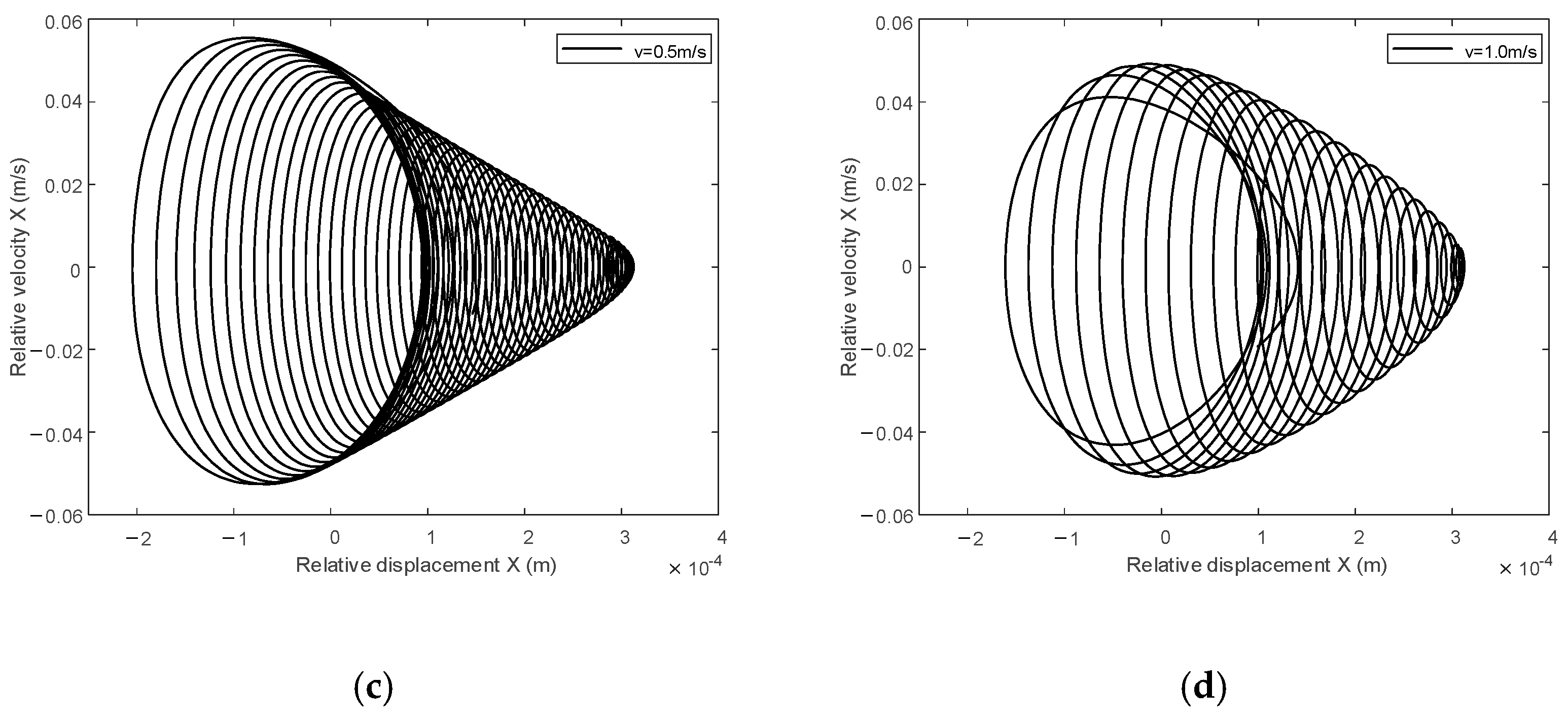
7.1.3. Effect of Driving Speed
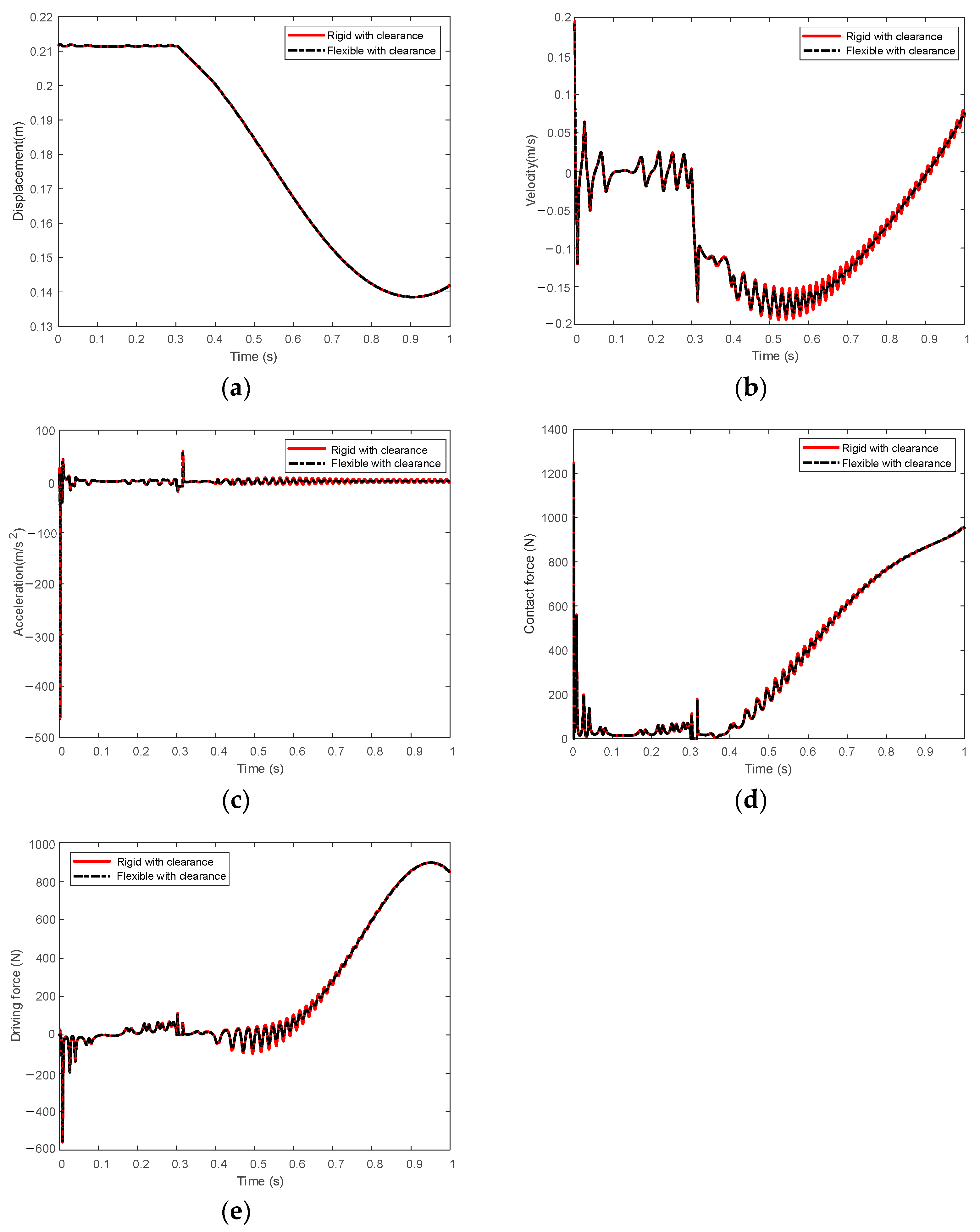
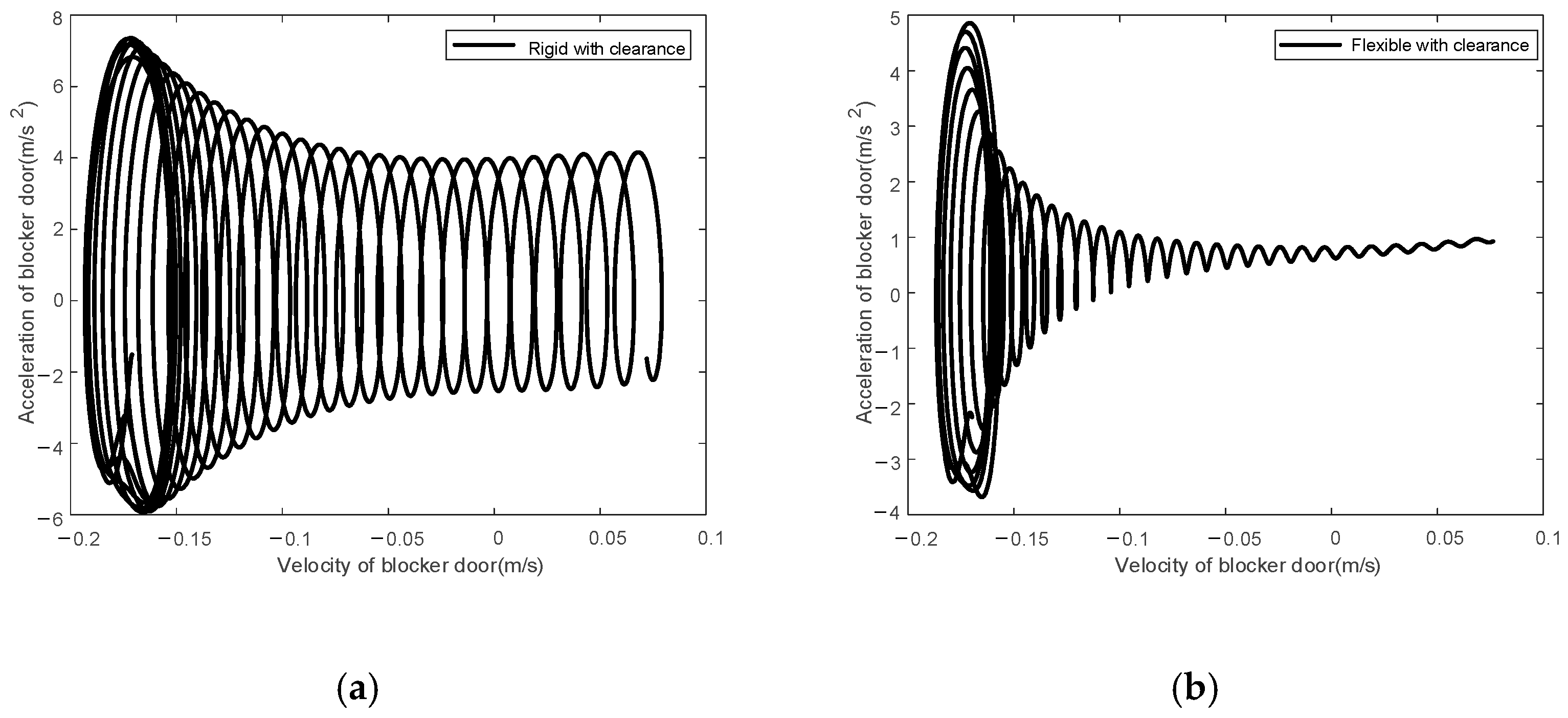
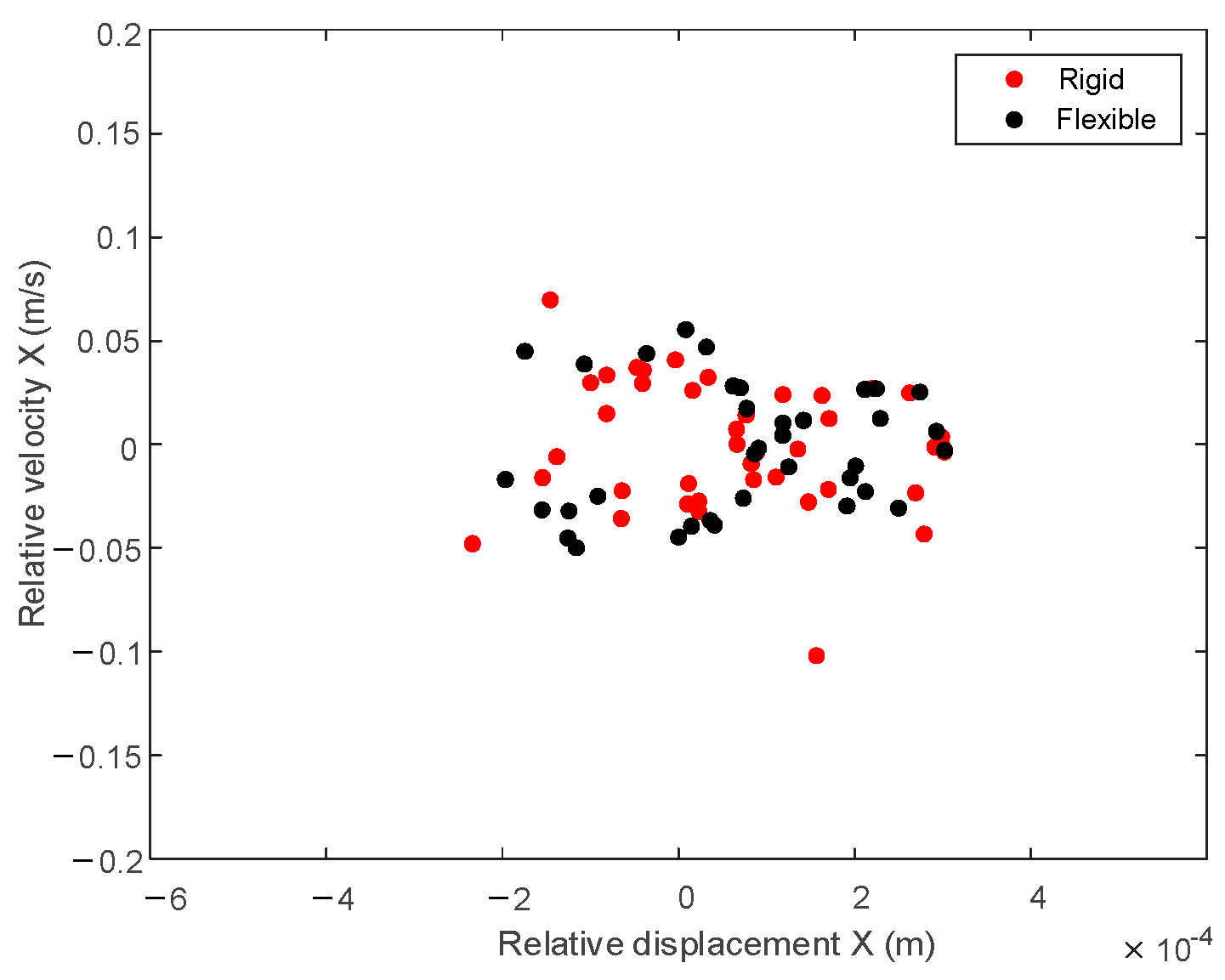
7.1.4. Effect of Flexible Component
7.2. Mechanism Simulation Parameters
8. Conclusions
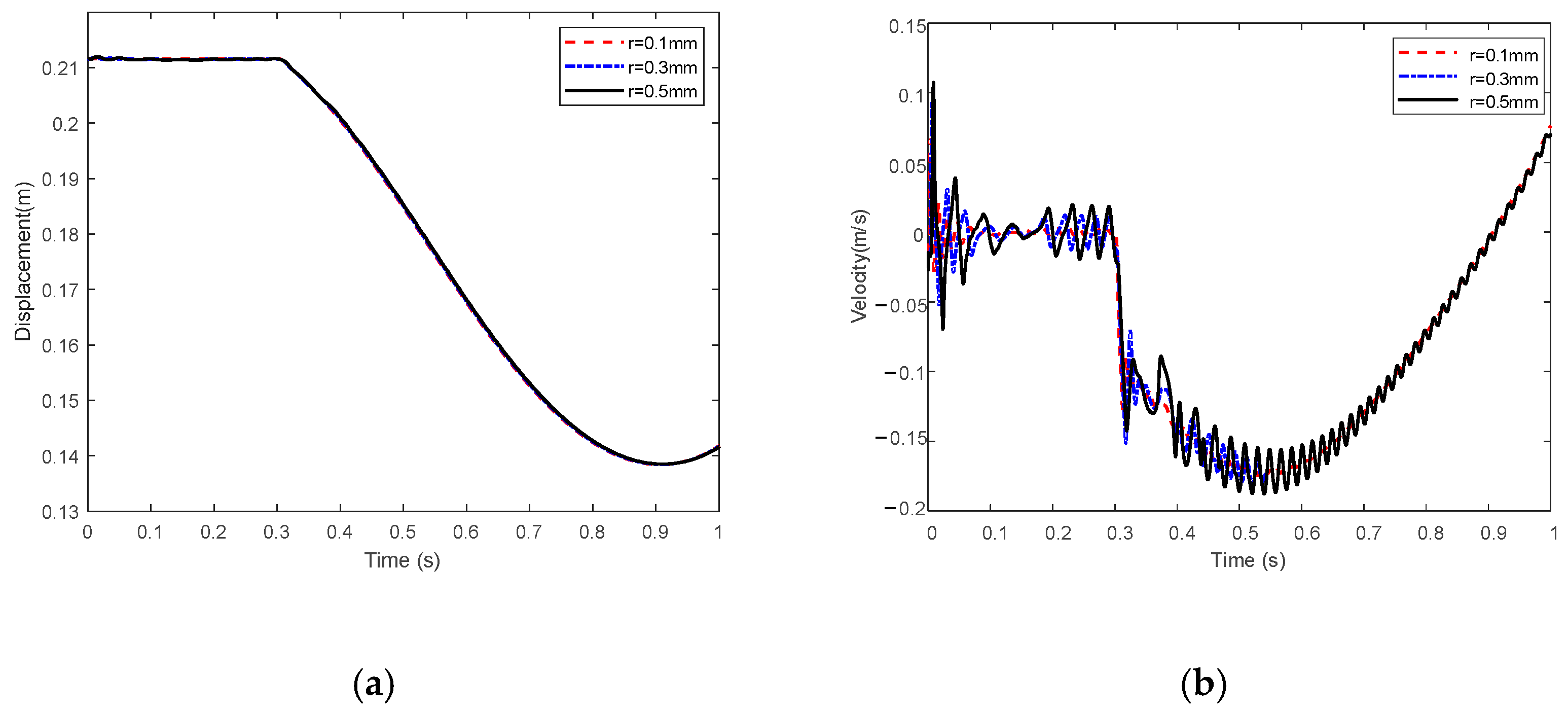
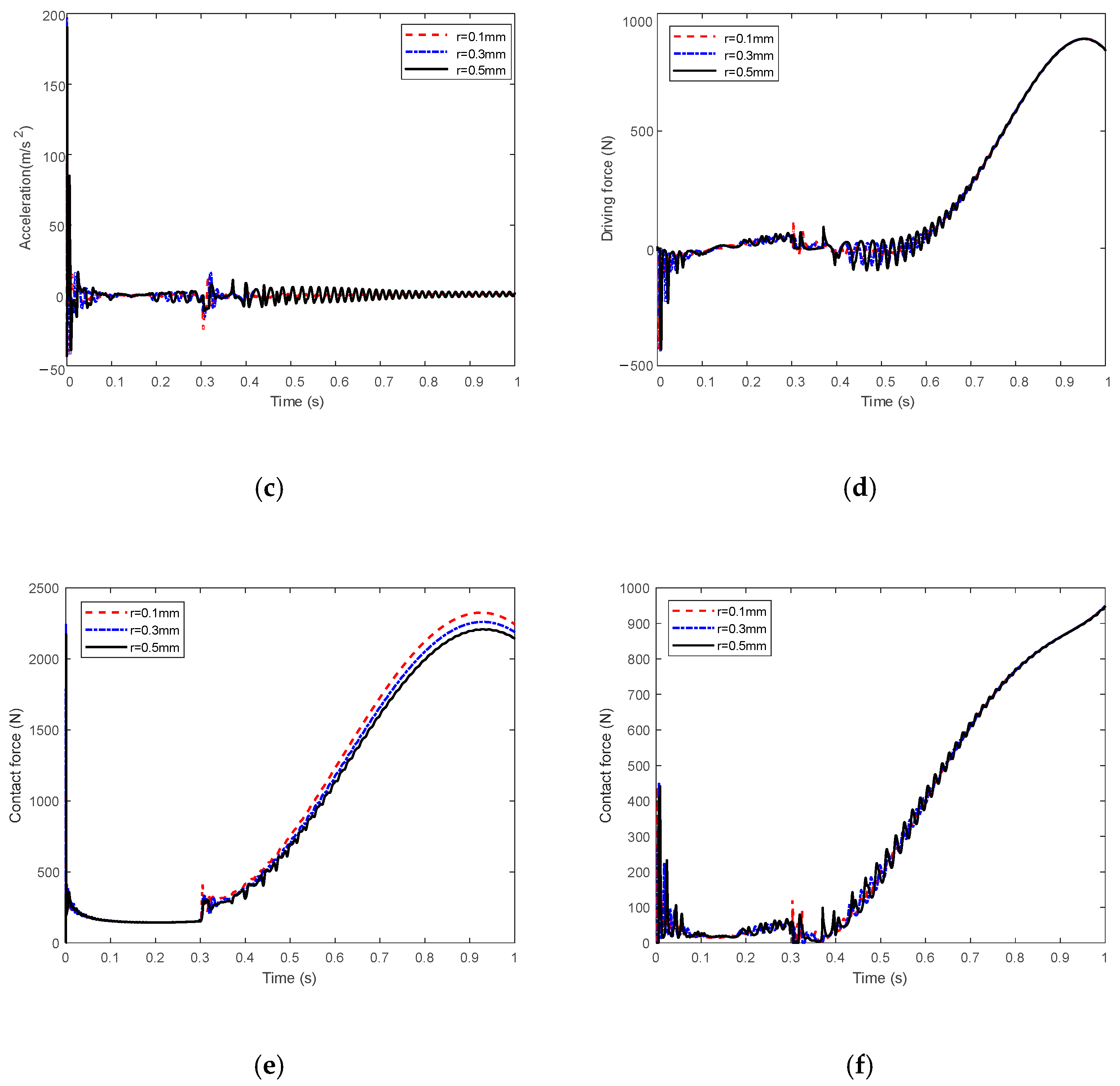
- The influences of clearance value, clearance position, clearance value, flexible body, and driving speed on the dynamic response of the mechanism are analyzed. The results show that the vibration of the mechanism increases with the clearance value, the number of clearance joints, and the driving speed, while the addition of flexible parts can effectively weaken the vibration caused by the clearance and improve the stability of the mechanism.
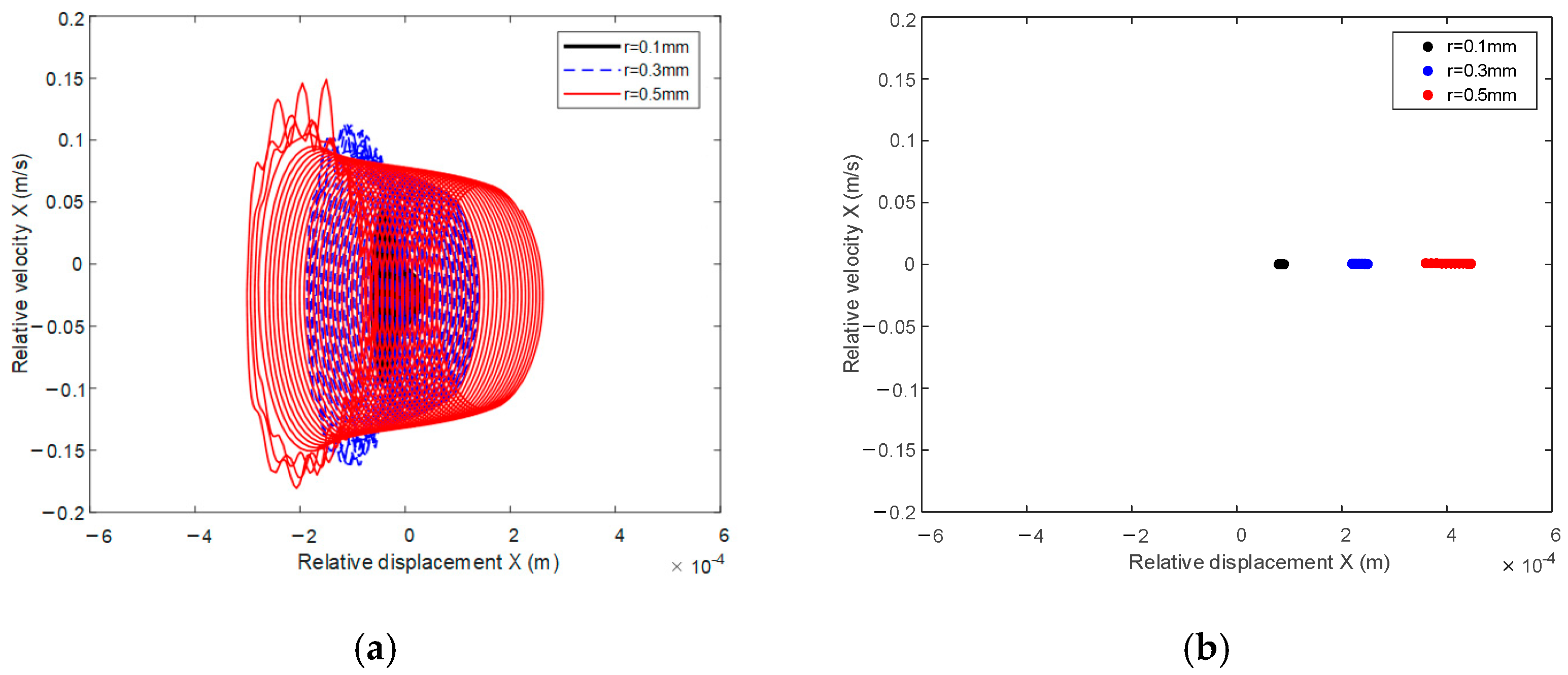
- The phase diagram at the clearance show that the nonlinear characteristics of the mechanism increase with the clearance value, the number of clearance joints, and driving speed, while the flexible body can significantly improve the stability of the blocker door motion. At the same time, the influence of clearance joint B is more obvious than clearance joint A. Therefore, during the design and installation of the thrust reverse mechanism, the machining accuracy and installation accuracy of clearance B should be strictly controlled.
- The reaction force of actuators 1 and 3 is consistent, and opposite to actuator 2. When the actuator 2 is asynchronous, the driving force of the mechanism is the largest. It can be seen from the change of driving force that when the asynchronous occurs, the driving speed of actuator 2 is lower than that of actuators 1 and 3, which can effectively reduce the peak driving force of actuators.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yetter, J.A. Why do airlines want and use thrust reverser? TM95-109158; NASA: Washington, DC, USA, 1995. [Google Scholar]
- Lei, W. Troubleshooting and maintenance of thrust reverser for 737NG aircraft. Civ. Aircr. Des. Res. 2018, 131, 85–90. [Google Scholar]
- Mahmood, T.; Jackson, A.; Rizvi, S.H.; Pilidis, P.; Savill, M.; Sethi, V. Thrust Reverser for a Mixed Exhaust High Bypass Ratio Turbofan Engine and its Effect on Aircraft and Engine Performance. Am. Soc. Mech. Eng. 2012, 17, 205–215. [Google Scholar]
- Liu, D. Intake and exhaust system Aeroengine Design Manual (Seventh Volume); Aviation Industry Press: Beijing, China, 2000. [Google Scholar]
- Yongqin, C.; Tianxing, W.; Sanmai, S.; Chao, L. Modeling and simulation of thrust reverser hydraulic actuation system based on AMESim. J. Aerosp. Power 2017, 32, 2791–2799. [Google Scholar]
- Mckay, B.; Barlow, A. The Ultra Fan Engine and Aircraft Based Thrust Reversing. In Proceedings of the AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Atlanta, Georgia, 30 July–1 August 2012. [Google Scholar]
- Jin, B.; Xing, W.; Liu, D. Thrust reversers of aircraft/engine propulsion system. Aeroengine 2004, 30, 48–58. [Google Scholar]
- Du, G.; Jin, J. Large Transport aircraft engine reverse thrust device. In Proceedings of the Large Aircraft Key Technology High-level Forum and 2007 Annual Meeting of China Aviation Society, Shenzhen, China, 1–2 September 2008; pp. 375–385. [Google Scholar]
- Asbury, S.C.; Yetter, J.A. Static performance of six innovative thrust reverser concepts for subsonic transport applications. Summ. NASA Langley Innov. Thrust Reverser Test Program 2000. [Google Scholar]
- Zhang, G.; Wang, Q. The influence of main geometric parameters on the performance of cascade reverse thrust device. J. Aerosp. Power 2014, 27, 145–151. [Google Scholar]
- Wang, T. Research on Modeling and Simulation of Aircraft Thrust Reverse Device and Its Actuation System; Xidian University: Xi’an, China, 2017. [Google Scholar]
- Chen, Y.; He, J.; Su, S. Kinematics and dynamics simulation of thrust reverser. J. Aerosp. Power 2019, 34, 2316–2323. [Google Scholar]
- Zhang, S.; Wang, H.; He, J. Load and force transmission of cascade thrust reverser. J. Sichuan Ordnance 2015, 3, 56–59. [Google Scholar]
- Xie, Y.; Wang, Q.; Shao, W. Effect of kinetic mechanism of blocker doors on aerodynamic performance for a cascade thrust reverser. J. Aerosp. Power 2010, 25, 1297–1302. [Google Scholar]
- Chen, Z.; Shan, Y.; Shen, X. Numerica simulation of the Suction characteristics of thrust reverser when landing. J. Aerosp. Power 2016, 31, 733–739. [Google Scholar]
- Qiu, A.; Sang, W.; Xie, R. Numerical investigation on thrust reverse flow field of podded engines on blended wing body. J. Aerosp. Power 2021, 36, 1906–1916. [Google Scholar]
- Varsegov, V.L.; Shabalin, A.S. Selection of an optimal turbulence model for numerical flow simulation in a cascade type turbofan engine thrust reverser. Russ Aeronaut 2015, 58, 484–487. [Google Scholar] [CrossRef]
- Liu, C.; Deng, J.; Su, S. Design of Loading System for Thrust Reverser Ground Simulation Test. IOP Conf. Series Earth Environ. Sci. 2018, 170, 042093. [Google Scholar] [CrossRef]
- Shi, G.; Pan, J. Electro-hydraulic force servo system for simulating thrust in reverse of experimental systems on the ground for airplane. China Mech. Eng. 2010, 21, 42–45. [Google Scholar]
- Butterfield, J.; Yao, H.; Price, M.; Armstrong, C.; Raghunathan, S.; Benard, E.; Cooper, R.; Monaghan, D. Enhancement of thrust reverser cascade performance using aerodynamic and structural integration. Aeronaut. J. 2004, 108, 621–628. [Google Scholar] [CrossRef] [Green Version]
- He, J. Dynamic Analysis and Structure Optimizationof Aircraft Thrust Reverser; Xidian University: Xi’an, China, 2020. [Google Scholar]
- Roosenboom, E.W.M. Flow field Investigation at Propeller Thrust Reverse. J. Fluids Eng. 2010, 132, 0611011–0611018. [Google Scholar] [CrossRef]
- McCormick, R.L.; Koepcke, W.W.; Gallagher, J.T. Capabilities of in-flight thrust reversing. J. Aircr. 1969, 6, 263–268. [Google Scholar] [CrossRef]
- Cammarata, A.; Lacagnina, M.; Sinatra, R. Closed-form solutions for the inverse kinematics of the Agile Eye with constraint errors on the revolute joint axes. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 317–322. [Google Scholar]
- Lankarani, H.M.; Nikravesh, P.E. A Contact Force Model with Hysteresis Damping for Impact Analysis of Multibody Systems. J. Mech. Des. 1990, 112, 369–376. [Google Scholar] [CrossRef]
- Flores, P.; Koshy, C.S.; Lankarani, H.M.; Ambrósio, J.; Claro, J.C.P. Numerical and experimental investigation on multibody systems with revolute clearance joints. Nonlinear Dyn. 2011, 65, 383–398. [Google Scholar] [CrossRef] [Green Version]
- Erkaya, S. Experimental investigation of flexible connection and clearance joint effects on the vibration responses of mechanisms. Mech. Mach. Theory 2018, 121, 515–529. [Google Scholar] [CrossRef]
- Flores, P.; Lankarani, H.M. Dynamic response of multibody systems with multiple clearance joints. J. Comput. Nonlinear Dyn. 2012, 7, 031003. [Google Scholar] [CrossRef]
- Machado, M.; Moreira, P.; Flores, P.; Lankarani, H.M. Compliant contact force models in multibody dynamics: Evolution of the Hertz contact theory. Mech. Mach. Theory 2012, 53, 99–121. [Google Scholar] [CrossRef]
- Den Hartog, J.P. Forced vibrations with combined coulomb and viscous friction. Trans. ASME 1993, 19, 107–115. [Google Scholar]
- Ambrósio, J.A.C. Impact of rigid and flexible multibody systems: Deformation description and contact models. In Virtual Non-Linear Multibody Systems; Springer: Dordrecht, The Netherland, 2003; pp. 57–81. [Google Scholar]
- Shabana, A.A. An Absolute Nodal Coordinates Formulation for the Large Rotation and Deformation Analysis of Flexible Bodies; Technical Report. No. MBS96-1-UIC; University of Illinois at Chicago: Chicago, IL, USA, 1996. [Google Scholar]
- Shabana, A.A. Computer Implementation of the Absolute Nodal Coordinate Formulation for Flexible Multibody Dynamics. Nonlinear Dyn. 1998, 16, 293–306. [Google Scholar] [CrossRef]
- Gerstmayr, J.; Shabana, A.A. Analysis of Thin Beams and Cables Using the Absolute Nodal Coordinate Formulation. Non-Linear Dyn. 2006, 45, 109–130. [Google Scholar] [CrossRef]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Model length | 1.0 m |
| Element density | 3.20 × 102 kg/m3 |
| Young’s modulus | 1.60 × 106 N/m2 |
| Poisson’s ratio | 0 |
| Cross section area | 2.50 × 10−5 m2 |
| Initial angular velocity | 4.0 rad/s |
| Integration step size | 0.001 s |
| Component | Length (m) | Mass (kg) | Moment of Inertia (m4) |
|---|---|---|---|
| large pull rod | 0.22 | 0.5 | 2.01 × 10−7 |
| transfer pull rod | 0.036 | 0.2 | 1.94 × 10−9 |
| blocker door | 0.195 | 5.0 | 7.49 × 10−6 |
| mobile fairing | 0.80 | 50.0 | 2.46 × 10−5 |
| limit lug | 0.055 | 0.1 | 8.30 × 10−10 |
| Parameter | Value |
|---|---|
| Bearing radius | 0.01 m |
| Bearing width | 0.015 m |
| Young’s modulus | 207 Gpa |
| Poisson’s ratio | 0.29 |
| Friction coefficient | 0.3 |
| Restitution coefficient | 0.9 |
| Tangential velocity V1 | 0.001 m/s |
| Tangential velocity V0 | 0.0001 m/s |
| Integration step size | 0.001 s |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Young’s Modulus (Gpa) | 207 | Sectional area A (m2) | 0.002 |
| Density (kg/m3) | 7850 | Section moment of inertia If (m4) | 2.01 × 10−7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Wang, X.; Meng, C.; Song, H.; Luo, Z.; Han, Q. Dynamic Modeling and Analysis of Thrust Reverser Mechanism Considering Clearance Joints and Flexible Component. Aerospace 2022, 9, 611. https://doi.org/10.3390/aerospace9100611
Zhao J, Wang X, Meng C, Song H, Luo Z, Han Q. Dynamic Modeling and Analysis of Thrust Reverser Mechanism Considering Clearance Joints and Flexible Component. Aerospace. 2022; 9(10):611. https://doi.org/10.3390/aerospace9100611
Chicago/Turabian StyleZhao, Jingchao, Xiaoyu Wang, Chao Meng, Huitao Song, Zhong Luo, and Qingkai Han. 2022. "Dynamic Modeling and Analysis of Thrust Reverser Mechanism Considering Clearance Joints and Flexible Component" Aerospace 9, no. 10: 611. https://doi.org/10.3390/aerospace9100611
APA StyleZhao, J., Wang, X., Meng, C., Song, H., Luo, Z., & Han, Q. (2022). Dynamic Modeling and Analysis of Thrust Reverser Mechanism Considering Clearance Joints and Flexible Component. Aerospace, 9(10), 611. https://doi.org/10.3390/aerospace9100611