
Flight/Propulsion Integrated Control of Over-Under TBCC Engine Based on GA-LQR Method

Abstract
:1. Introduction
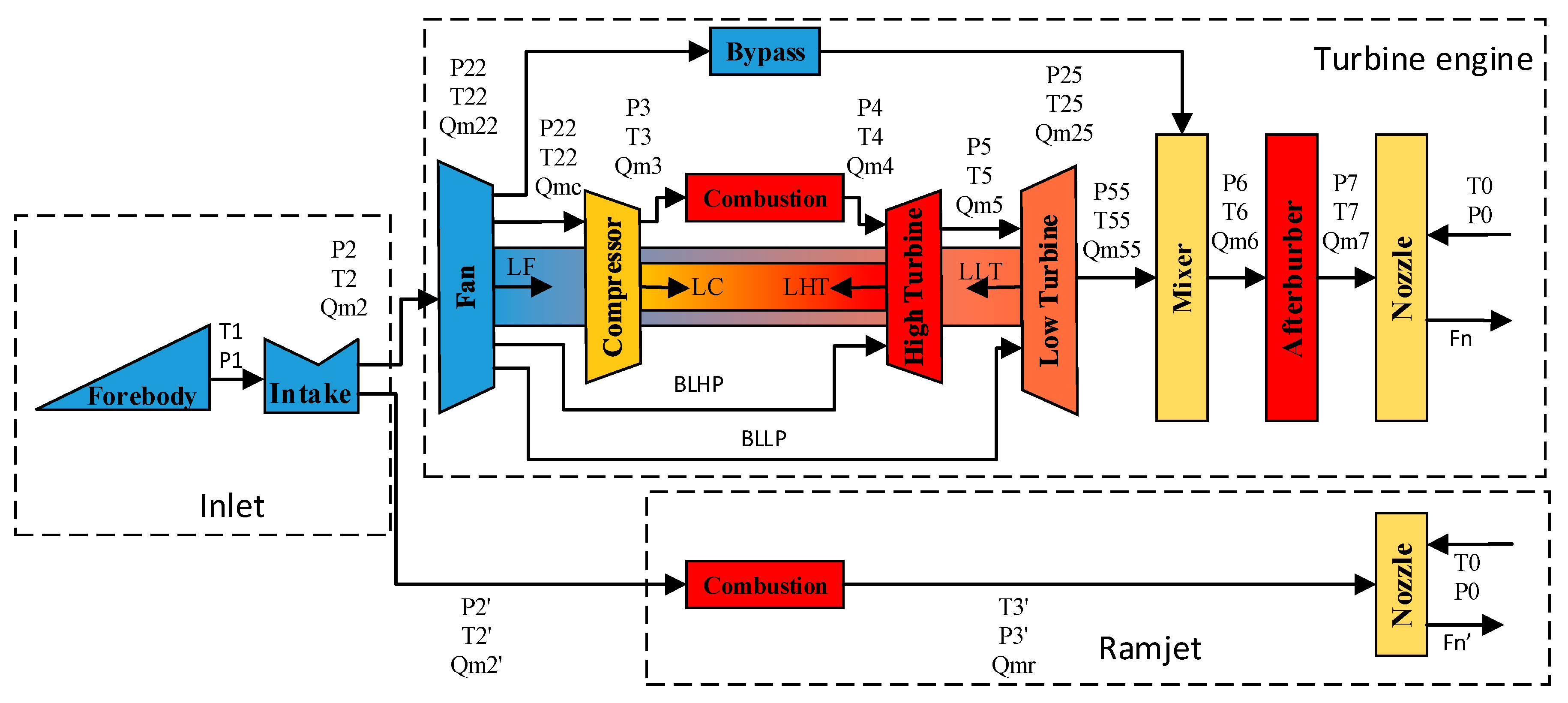
2. Model Establishment of Over-Under TBCC Engine
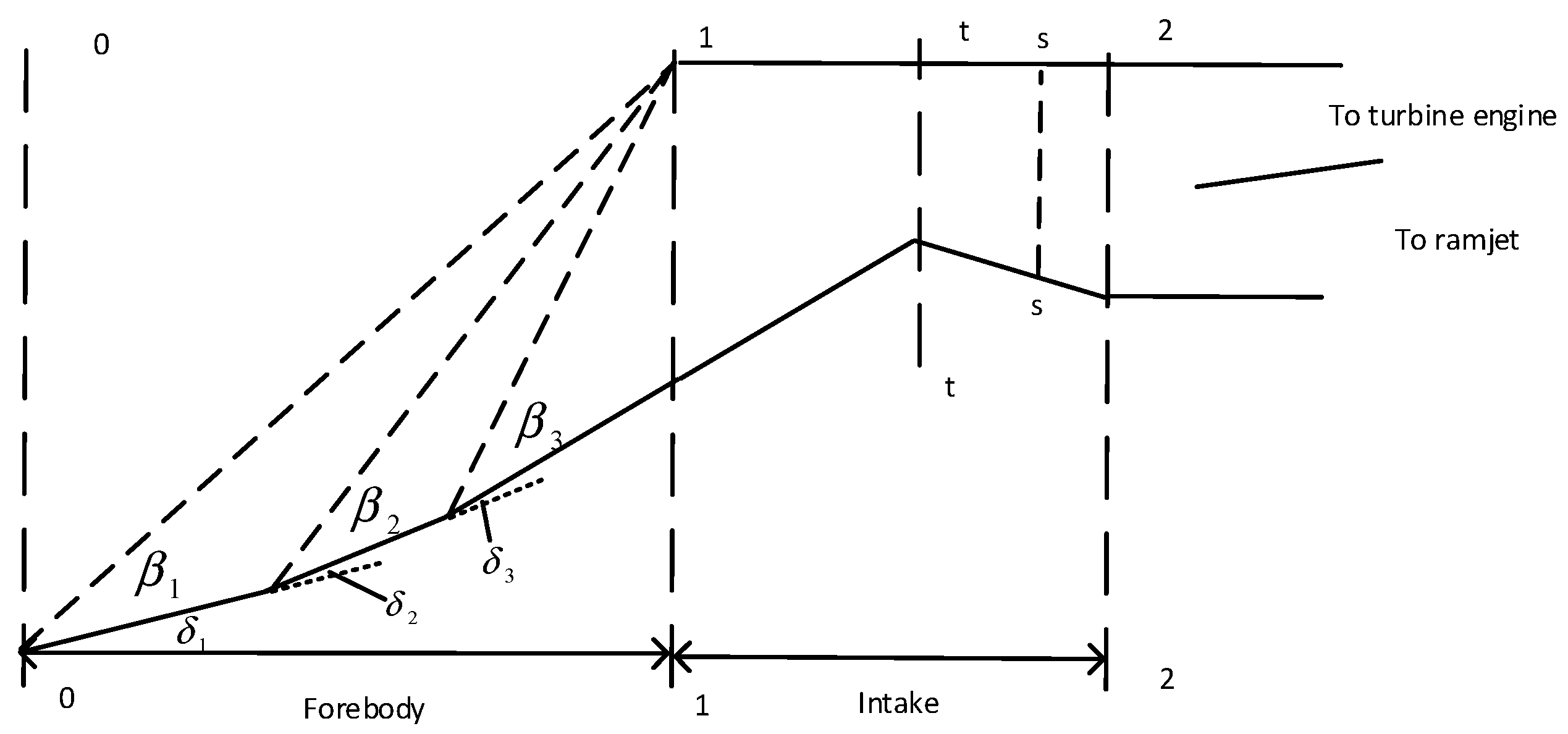
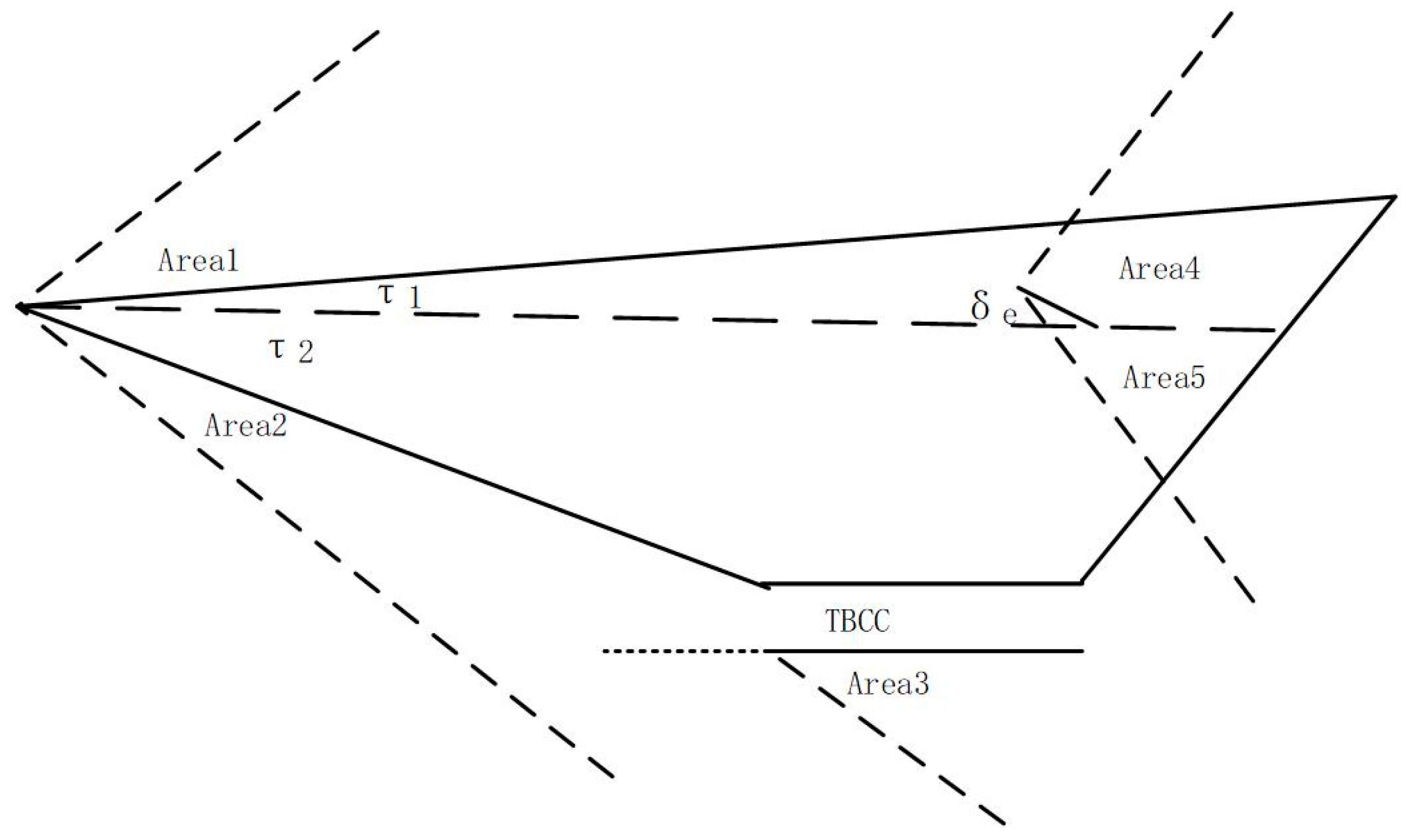
2.1. Mixed Compression Inlet
2.2. Model Synthesis Iteration
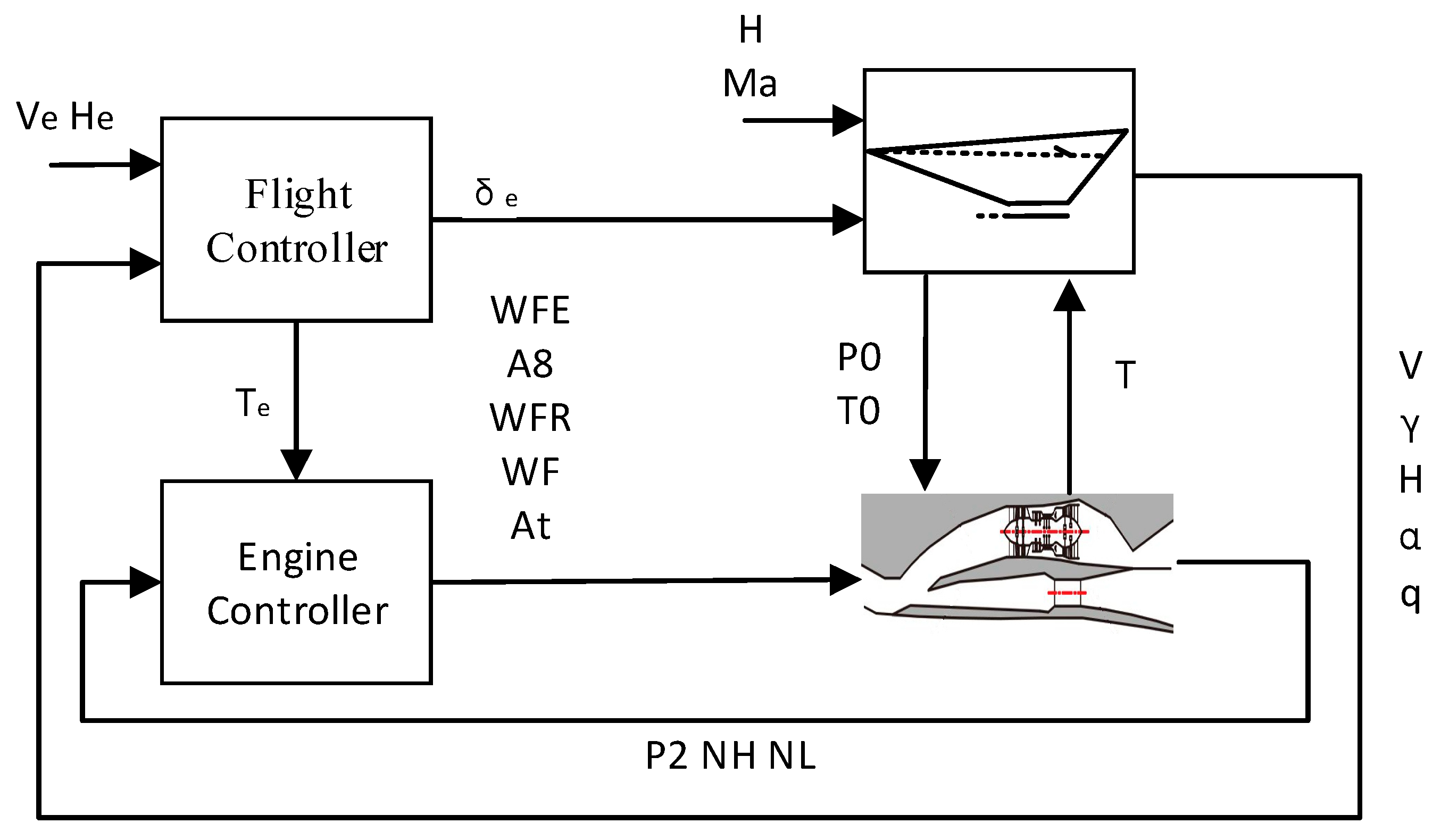
3. Flight/Propulsion Integrated Simulation Implementation
4. Flight/Propulsion Integrated Controller Design and Simulation Result
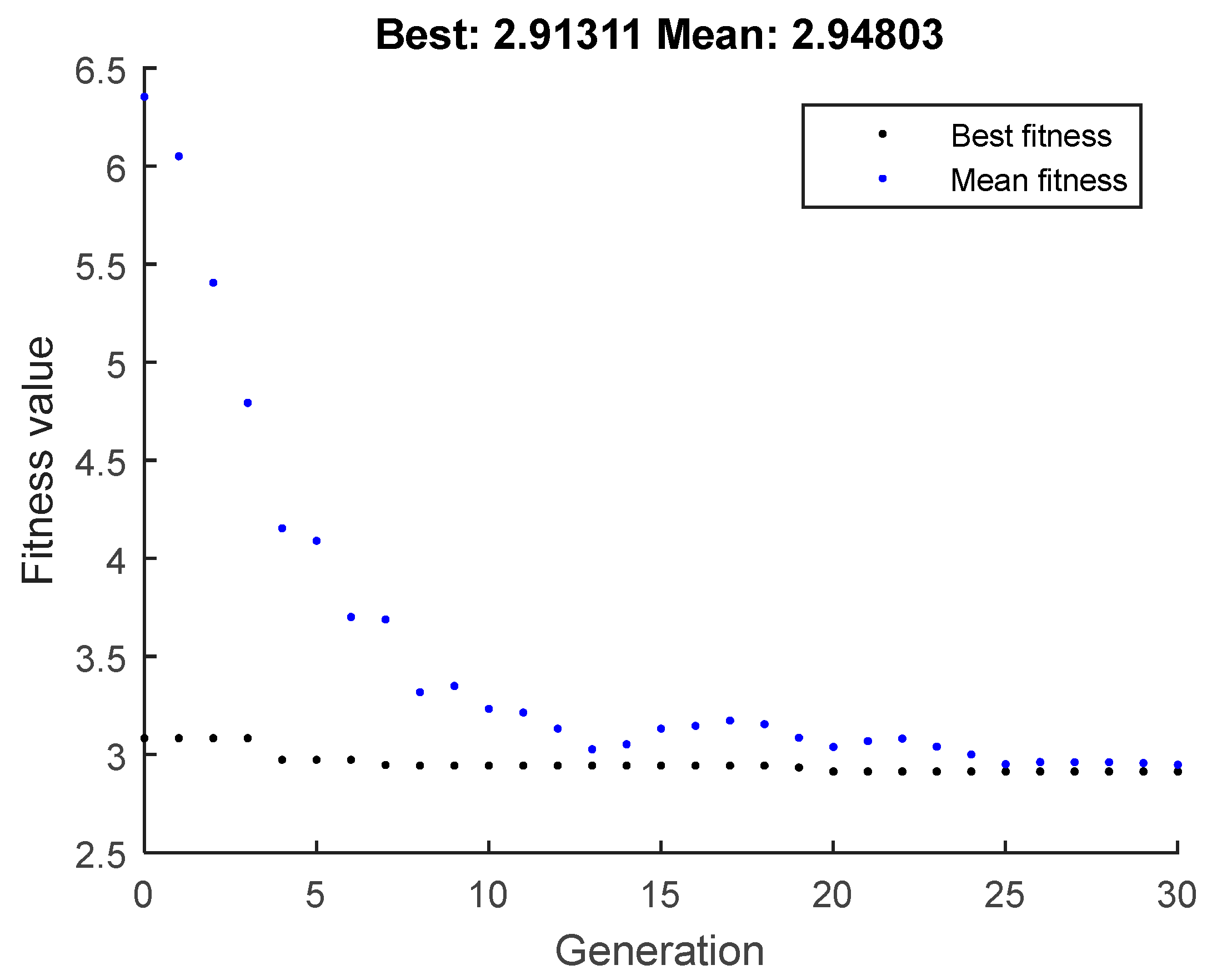
4.1. Controller Design
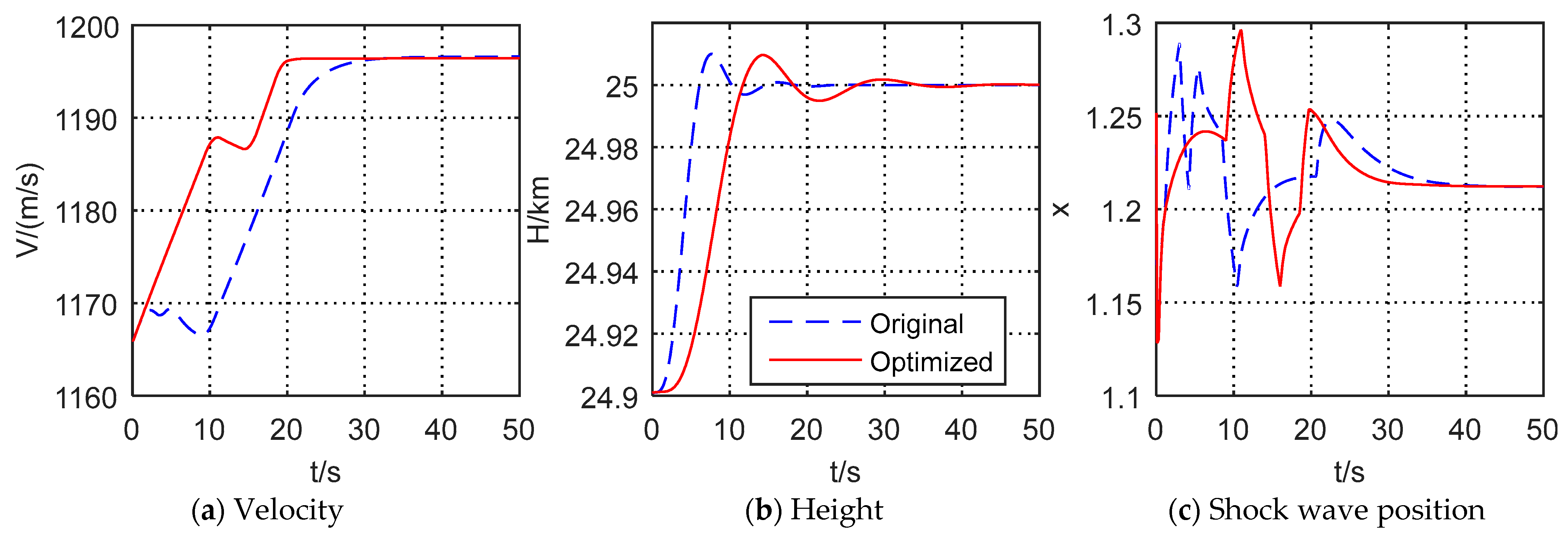
4.2. Climbing Simulation and Result
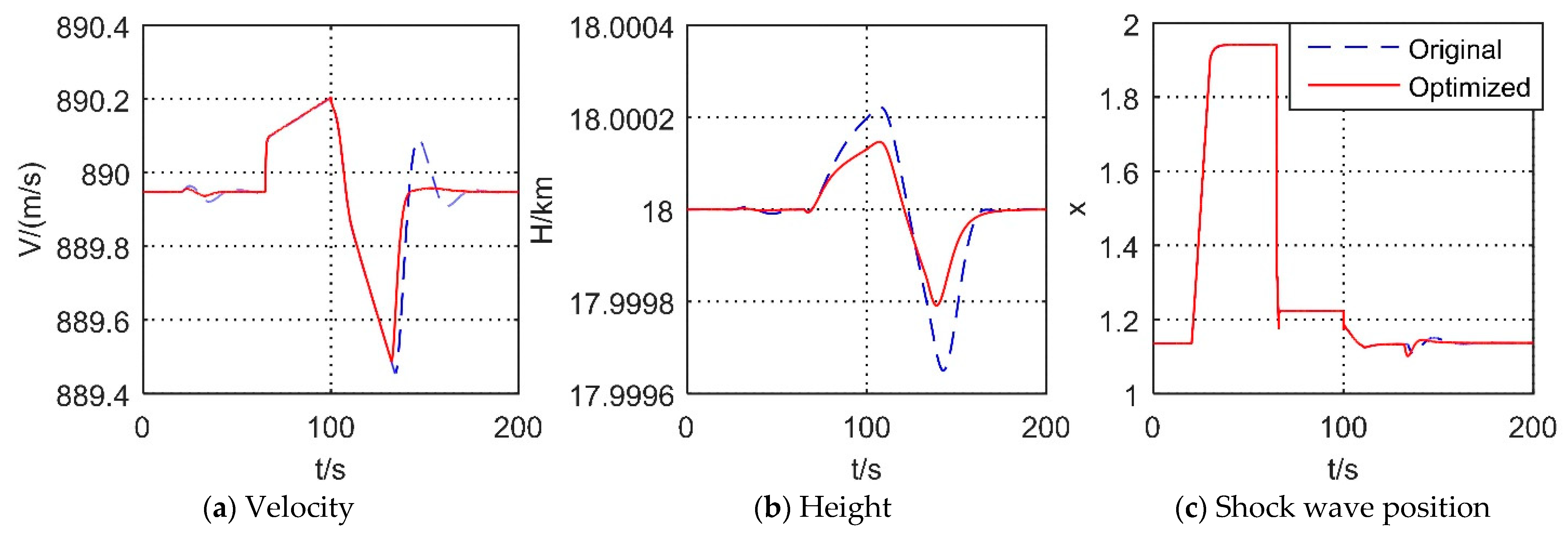
4.3. Flight/Propulsion Integrated Mode Transition Simulation Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Le, D.; Vrnak, D.; Slater, J. A Framework for Simulating Turbine-Based Combined—Cycle Inlet Mode-Transition. In Proceedings of the AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Atlanta, GA, USA, 30 July–1 August 2012. [Google Scholar] [CrossRef] [Green Version]
- Saunders, J.D.; Stueber, T.J.; Suder, K.L. Testing of the NASA Hypersonics Project’s Combined Cycle Engine Large Scale Inlet Mode Transition Experiment (CCE LIMX). In Proceedings of the 58th Joint Army-Navy-NASA-Air Force (JANNAF) Propulsion Meeting, Arlington, TX, USA, 1 January 2012. [Google Scholar]
- Foster, L.E.; Saunders, J.D.; Sanders, B.W. Highlights from a Mach 4 Experimental Demonstration of Inlet Mode Transition for Turbine-Based Combined Cycle Hypersonic Propulsion. In Proceedings of the 48th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Atlanta, GA, USA, 30 July–1 August 2012. [Google Scholar] [CrossRef]
- Steelant, J. Achievements Obtained for Sustained Hypersonic Flight within the LAPCAT Project. In Proceedings of the 15th AIAA Inter-national Space Planes and Hypersonic Systems and Technologies Conference, Dayton, OH, USA, 28 April–1 May 2008. [Google Scholar] [CrossRef]
- Bulman, M.J.; Siebenhaar, A. Combined Cycle Propulsion: Aerojet Innovations for Practical Hypersonic Vehicles. In Proceedings of the 17th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, San Francisco, CA, USA, 11–14 April 2011. [Google Scholar] [CrossRef]
- Miyagi, H.; Kimura, H.; Kishi, K. Combined Cycle Engine Research in Japanese HYPR Program. In Proceedings of the 34th AI-AA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Cleveland, OH, USA, 13–15 July 1998. [Google Scholar] [CrossRef]
- Liu, J.; Yuan, H.; Ge, N. Turbine Based Combined Cycle Inlet Mode Transition at Different Operation Conditions. In Proceedings of the 21st AIAA International Space Planes and Hypersonics Technologies Conference, Xiamen, China, 6–9 March 2017. [Google Scholar] [CrossRef]
- Daniel, A.H.; Eric, J.G. Integrated Turbine-Based Combined Cycle Dynamic Simulation Model. In Proceedings of the 58th Joint Army-Navy-NASA-Air-Farce (JAN-NA) Interagency Propulsion Meeting, Arlington, TX, USA, 18 April 2011. [Google Scholar]
- Huang, H.; Wang, Z.; Cai, Y. Analysis of mode transition with thrust smoothing of small turbine/ramjet combined cycle engine. J. Aerosp. Power 2010, 24, 2756–2762. [Google Scholar] [CrossRef]
- Huang, H.; Wang, Z.; Liu, Z. Exploring Mode Transition with Air Mass Flow Smoothing of Small Turbine/Ramjet Engine (TRE). J. Northwest. Polytech. Univ. 2010, 28, 234–239. [Google Scholar] [CrossRef]
- Zhang, M.; Zhou, L.; Wng, Z. Simulation and Analysis of Mode Transition Performance for an Over-Under TBCC Engine. J. Propuls. Technol. 2018, 39, 35–43. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, Z.; Liu, Z. Analysis of Mode Transition Performance for a Mach 4 Over-Under TBCC Engine. J. Propuls. Technol. 2017, 38, 15–322. [Google Scholar] [CrossRef]
- Ma, J. Control Study for Over-Under TBCC Engine with Safety Boundaries. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2018. [Google Scholar]
- Nie, L.; Li, Y.; Dai, D. Study on Mode Transition Multi-Variable Control for Turbine-Based Combined Cycle Engine. J. Propuls. Technol. 2017, 38, 968–974. [Google Scholar] [CrossRef]
- Alsuwian, T.M.; Ordonez, R.; Jacobsen, L. Adaptive Control for Longitudinal Dynamics of Hypersonic Vehicle at Subsonic Speeds. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- Sun, J.G.; Song, S.M.; Peng, L. Adaptive anti-saturation fault-tolerant control of hypersonic vehicle with actuator faults. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 2066–2083. [Google Scholar] [CrossRef]
- Zhong, Z.Y.; Sun, J.G. Robust fault-tolerant control design for hypersonic vehicle with input saturation and actuator faults. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2021, 236, 1563–1576. [Google Scholar] [CrossRef]
- Feng, X.; Wang, Y.; Wu, Q. Longitudinal coordination control of hypersonic vehicle based on dynamic equation. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 5205–5216. [Google Scholar] [CrossRef]
- Zheng, J.; Chang, J.; Ma, J. Modeling and analysis for integrated airframe/propulsion control of vehicles during mode transition of Over-Under Turbine-Based-Combined-Cycle engines. Aerosp. Sci. Technol. 2019, 95, 105462. [Google Scholar] [CrossRef]
- Fu, Q. Research on the Control Law of Dual Mode Scramjet. Ph.D. Thesis, Northwestern Polytechnical University, Xi’an, China, 2019. [Google Scholar]
- Qin, L. Solution of Shock with Variable Specific Heat for Calculation of Hypersonic Inlet. J. Aerosp. Power 2000, 15, 105–108. [Google Scholar] [CrossRef]
- Huang, H.; Huang, G.; Zuo, F. CFD Simulation of TBCC Inlet Based on Internal WaveRider Concept. In Proceedings of the 21st AIAA International Space Planes and Hypersonics Technologies Conference, Xiamen, China, 6–9 March 2017. [Google Scholar] [CrossRef]
- Yu, H.; Guo, Y. Modeling and Simulation of Parallel TBCC Aircraft/Engine Integrated System. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020. [Google Scholar] [CrossRef]
- Jia, L.; Chen, Y.; Gao, Y. Integrated design and optimization of high speed vehicle and turbine based propulsion system. In Proceedings of the 21st AIAA International Space Planes and Hypersonics Technologies Conference, Xiamen, China, 6–9 March 2017. [Google Scholar] [CrossRef]
- Marrison, C.I.; Stengel, R.F. Design of Robust Control Systems for a Hypersonic Aircraft. J. Guid. Control. Dyn. 1998, 21, 58–63. [Google Scholar] [CrossRef]
- Qu, X.; Wang, J.; Ren, Z. Hypersonic Vehicle Longitudinal Control Using Adaptive Time-varying Terminal Sliding Modes. In Proceedings of the 12th Biennial International Conference on Engineering, Construction, and Operations in Challenging Environments, Honolulu, HI, USA, 14–17 March 2010. [Google Scholar] [CrossRef]
- Zheng, J.; Chang, J.; Ma, J. Analysis of aerodynamic/propulsive couplings during mode transition of over-under turbine-based-combined-cycle engines. Aerosp. Sci. Technol. 2020, 99, 105773. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Working Status | Parameter Category | Design Parameters | Model Parameters | Percentage Error |
|---|---|---|---|---|
| Ma = 4 H = 25 km α = 1.8 | Air flow Rate | 50.61 kg/s | 50.6102 kg/s | 0.004% |
| Total Pressure before Combustion | 201.2 kPa | 201.7 kPa | 0.2% | |
| Thrust | 26.13 kN | 26.16 kN | 0.1% | |
| Ma = 4 H = 25 km α = 1.4 | Air flow Rate | 50.61 kg/s | 50.6102 kg/s | 0.004% |
| Total Pressure before Combustion | 201.2 kPa | 201.4 kPa | 0.1% | |
| Thrust | 32.73 kN | 32.85 kN | 0.4% | |
| Ma = 3 H = 18 km α = 1.8 | Total Pressure before Combustion | 185.49 kPa | 185.52 kPa | 0.02% |
| 5% Settling Time of V Divided by 20 s | |
| 3% Settling Time of H Divided by 20 s | |
| Overshoot of V Divided by 5% | |
| Overshoot of H Divided by 5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Guo, Y.; Yan, X.; Wang, J. Flight/Propulsion Integrated Control of Over-Under TBCC Engine Based on GA-LQR Method. Aerospace 2022, 9, 621. https://doi.org/10.3390/aerospace9100621
Yu H, Guo Y, Yan X, Wang J. Flight/Propulsion Integrated Control of Over-Under TBCC Engine Based on GA-LQR Method. Aerospace. 2022; 9(10):621. https://doi.org/10.3390/aerospace9100621
Chicago/Turabian StyleYu, Huafeng, Yingqing Guo, Xinghui Yan, and Jiamei Wang. 2022. "Flight/Propulsion Integrated Control of Over-Under TBCC Engine Based on GA-LQR Method" Aerospace 9, no. 10: 621. https://doi.org/10.3390/aerospace9100621
APA StyleYu, H., Guo, Y., Yan, X., & Wang, J. (2022). Flight/Propulsion Integrated Control of Over-Under TBCC Engine Based on GA-LQR Method. Aerospace, 9(10), 621. https://doi.org/10.3390/aerospace9100621