
Trajectory Approximation of a Coulomb Drag-Based Deorbiting


Abstract
:1. Introduction
2. Trajectory Approximation
2.1. Asymptotic Series Expansion Approach
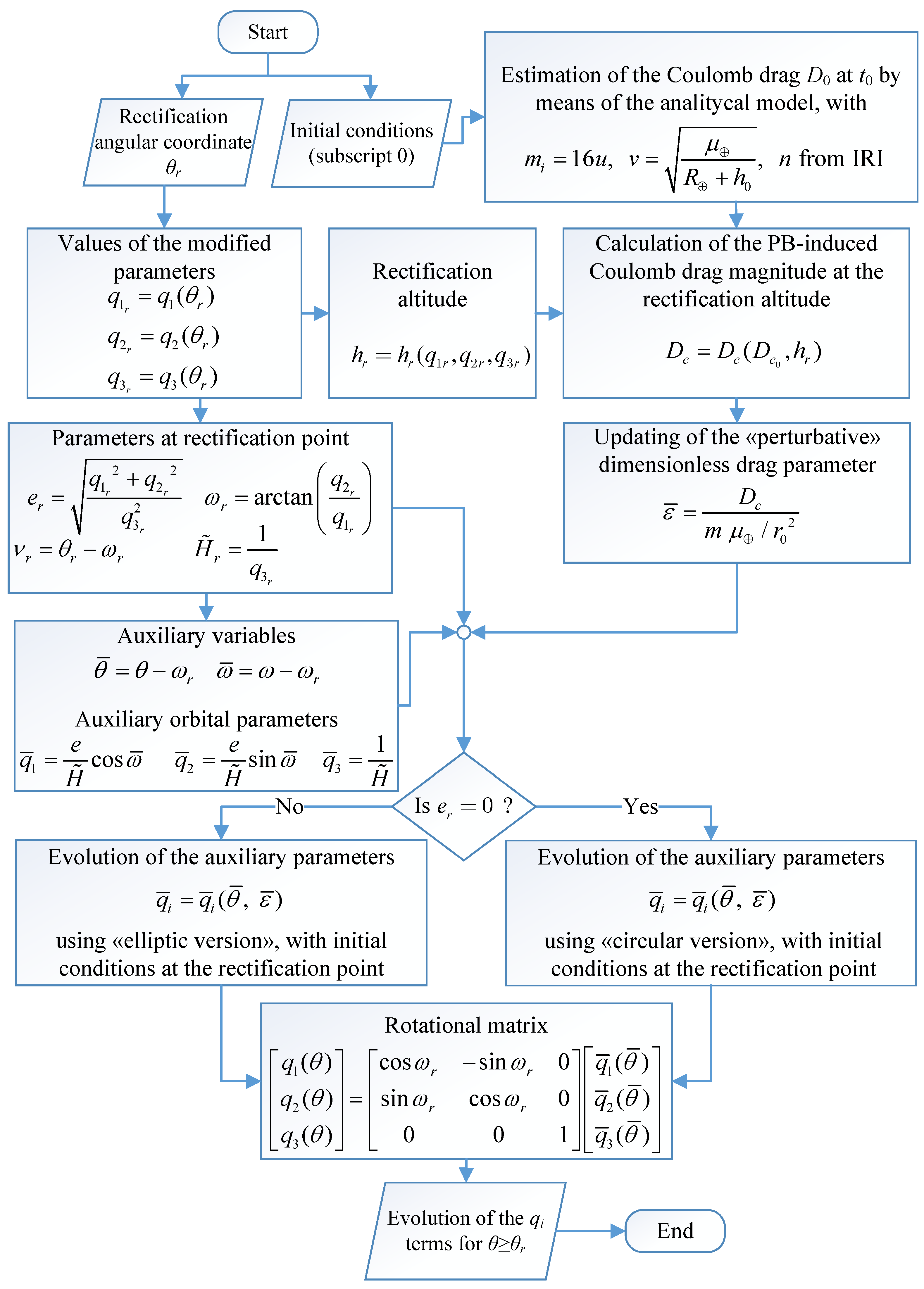
2.2. Rectification Procedure
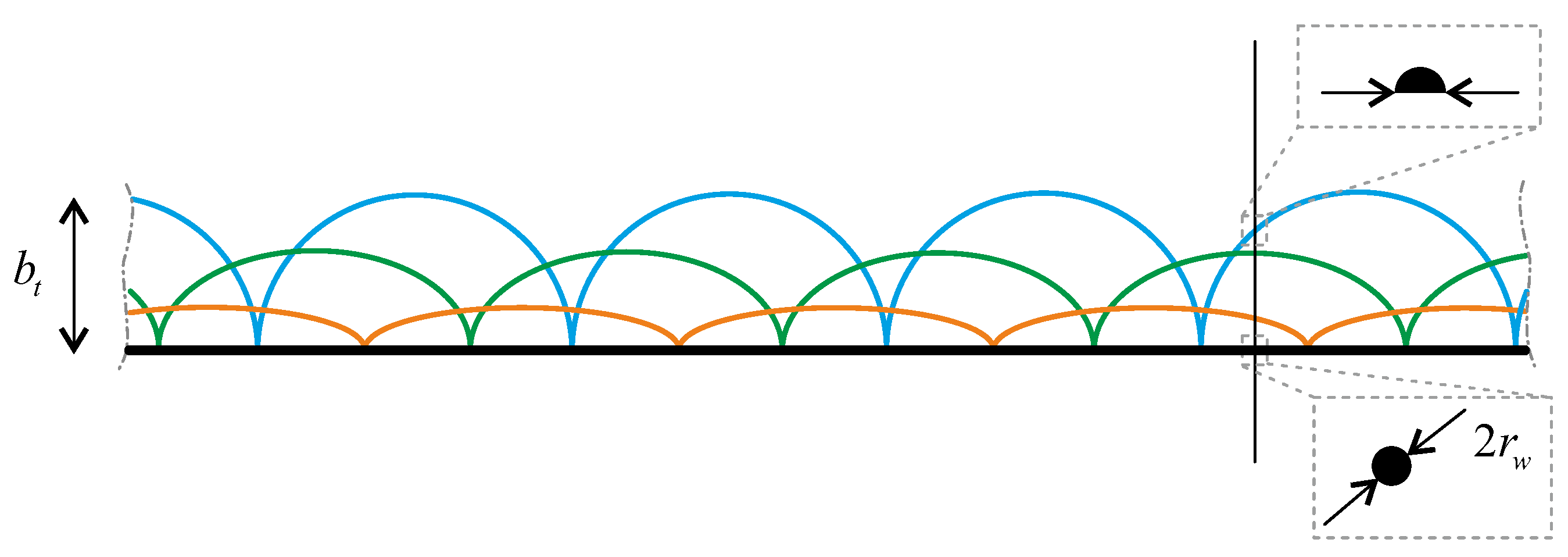
2.3. PB-Induced Drag Model
3. Case Study
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- ESA Space Debris Office. ESA’s Annual Space Environment Report; Techreport GEN-DB-LOG-00288-OPS-SD; The European Space Agency: Darmstadt, Germany, 2022. [Google Scholar]
- Rossi, A.; Colombo, C.; Tsiganis, K.; Beck, J.; Rodriguez, J.B.; Walker, S.; Letterio, F.; Dalla Vedova, F.; Schaus, V.; Popova, R.; et al. ReDSHIFT: A Global Approach to Space Debris Mitigation. Aerospace 2018, 5, 64. [Google Scholar] [CrossRef] [Green Version]
- Horstmann, A.; Kebschull, C.; Müller, S.; Gamper, E.; Hesselbach, S.; Soggeberg, K.; Ben Larbi, M.K.; Becker, M.; Lorenz, J.; Wiedemann, C.; et al. Survey of the Current Activities in the Field of Modeling the Space Debris Environment at TU Braunschweig. Aerospace 2018, 5, 37. [Google Scholar] [CrossRef] [Green Version]
- Hu, M.; Ruan, Y.; Zhou, H.; Xu, J.; Xue, W. Long-Term Orbit Prediction and Deorbit Disposal Investigation of MEO Navigation Satellites. Aerospace 2022, 9, 266. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Z.; Wang, W.; Zhang, Y.; Wang, H. Geostationary Orbital Debris Collision Hazard after a Collision. Aerospace 2022, 9, 258. [Google Scholar] [CrossRef]
- Kessler, D.J.; Cour-Palais, B.G. Collision frequency of artificial satellites: The creation of a debris belt. J. Geophys. Res. 1978, 83, 2637–2646. [Google Scholar] [CrossRef]
- Popova, R.; Schaus, V. The Legal Framework for Space Debris Remediation as a Tool for Sustainability in Outer Space. Aerospace 2018, 5, 55. [Google Scholar] [CrossRef] [Green Version]
- Schäfer, F.; Lambert, M.; Christiansen, E.; Kibe, S.; Stokes, H.; Reimerdes, H.-G.; Meshcheryakov, A.; Angrilli, F.; Zengyao, H. The Inter-Agency space Debris coordination Committee (IADC) protection manual. In Proceedings of the 4th European Conference on Space Debris, Darmstadt, Germany, 18–20 April 2005; European Space Agency (ESA): Darmstad, Germany, 2005. [Google Scholar]
- Yakovlev, M. The “IADC space debris mitigation guidelines” and support document. In Proceedings of the 4th European Conference on Space Debris, Darmstadt, Germany, 18–20 April 2005; European Space Agency (ESA): Darmstad, Germany, 2005. [Google Scholar]
- Janhunen, P. Electric sail for spacecraft propulsion. J. Propuls. Power 2004, 20, 763–764. [Google Scholar] [CrossRef]
- Bassetto, M.; Niccolai, L.; Quarta, A.A.; Mengali, G. A comprehensive review of electric solar wind sail concept and its applications. Prog. Aerosp. Sci. 2022, 128, 100768. [Google Scholar] [CrossRef]
- Mengali, G.; Quarta, A.A.; Janhunen, P. Electric sail performance analysis. J. Spacecr. Rocket. 2008, 45, 122–129. [Google Scholar] [CrossRef]
- Niccolai, L.; Quarta, A.A.; Mengali, G. Electric sail-based displaced orbits with refined thrust model. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2017, 232, 423–432. [Google Scholar] [CrossRef]
- Niccolai, L.; Quarta, A.A.; Mengali, G. Electric sail elliptic displaced orbits with advanced thrust model. Acta Astronaut. 2017, 138, 503–511. [Google Scholar] [CrossRef]
- Yamaguchi, K.; Yamakawa, H. Electric solar wind sail kinetic energy impactor for Near Earth Asteroid deflection mission. J. Astronaut. Sci. 2016, 63, 1–22. [Google Scholar] [CrossRef]
- Mengali, G.; Quarta, A.A.; Janhunen, P. Considerations of electric sailcraft trajectory design. J. Br. Interplanet. Soc. 2008, 61, 326–329. [Google Scholar]
- Quarta, A.A.; Mengali, G. Electric sail mission analysis for outer Solar System exploration. J. Guid. Control. Dyn. 2010, 33, 740–755. [Google Scholar] [CrossRef]
- Huo, M.; Mengali, G.; Quarta, A.A. Mission Design for an Interstellar Probe with E-Sail Propulsion System. J. Br. Interplanet. Soc. 2015, 68, 128–134. [Google Scholar]
- Matloff, G.L. The Solar-Electric Sail: Application to Interstellar Migration and Consequences for SETI. Universe 2022, 8, 252. [Google Scholar] [CrossRef]
- Janhunen, P. Electrostatic plasma brake for deorbiting a satellite. J. Propuls. Power 2010, 26, 370–372. [Google Scholar] [CrossRef]
- Janhunen, P. On the feasibility of a negative polarity electric sail. Ann. Geophys. 2009, 27, 1439–1447. [Google Scholar] [CrossRef] [Green Version]
- Janhunen, P. Simulation study of the plasma-brake effect. Ann. Geophys. 2014, 32, 1207–1216. [Google Scholar] [CrossRef] [Green Version]
- Lätt, S.; Slavinskis, A.; Ilbis, E.; Kvell, U.; Voormansik, K.; Kulu, E.; Pajusalu, M.; Kuuste, H.; Sünter, I.; Eenmäe, T.; et al. EstCube-1 nanosatellite for electric solar wind sail in-orbit technology demonstration. Proc. Est. Acad. Sci. 2014, 63, 200–209. [Google Scholar] [CrossRef]
- Slavinskis, A.; Pajusalu, M.; Kuuste, H.; Ilbis, E.; Eenmäe, T.; Sünter, I.; Laizans, K.; Ehrpais, H.; Liias, P.; Kulu, E.; et al. EstCube-1 in-orbit experience and lessons learned. IEEE Aerosp. Electron. Syst. Mag. 2015, 30, 12–22. [Google Scholar] [CrossRef]
- Mughal, M.R.; Praks, J.; Vainio, R.; Janhunen, P.; Envall, J.; Näsilä, A.; Oleynik, P.; Niemelä, P.; Nyman, S.; Slavinskis, A.; et al. Aalto-1, multi-payload CubeSat: In-orbit results and lessons learned. Acta Astronaut. 2021, 187, 557–568. [Google Scholar] [CrossRef]
- Kestilä, A.; Tikka, T.; Peitso, P.; Rantanen, J.; Näsilä, A.; Nordling, K.; Saari, H.; Vainio, R.; Janhunen, P.; Praks, J.; et al. Aalto-1 nanosatellite-technical description and mission objectives. Geosci. Instrum. Methods Data Syst. 2013, 2, 121–130. [Google Scholar] [CrossRef] [Green Version]
- Khurshid, O.; Tikka, T.; Praks, J.; Hallikainen, M. Accomodating the plasma brake experiment on-board the Aalto-1 satellite. Proc. Est. Acad. Sci. 2014, 63, 258–266. [Google Scholar] [CrossRef]
- Iakubivskyi, I.; Janhunen, P.; Praks, J.; Allik, V.; Bussov, K.; Clayhills, B.; Dalbins, J.; Eenmäe, T.; Ehrpais, H.; Envall, J.; et al. Coulomb drag propulsion experiments of ESTCube-2 and FORESAIL-1. Acta Astronaut. 2020, 177, 771–783. [Google Scholar] [CrossRef]
- Palmroth, M.; Praks, J.; Vainio, R.; Janhunen, P.; Kilpua, E.K.; Afanasiev, A.; Ala-Lahti, M.; Alho, A.; Asikainen, T.; Asvetari, E.; et al. FORESAIL-1 CubeSat mission to measure radiation belt losses and demonstrate deorbiting. J. Geophys. Res. Space Phys. 2019, 124, 5783–5799. [Google Scholar] [CrossRef] [Green Version]
- Iakubivskyi, I.; Ehrpais, H.; Dalbins, J.; Oro, E.; Kulu, E.; Kütt, J.; Janhunen, P.; Slavinskis, A.; Ilbis, E.; Ploom, I.; et al. EstCube-2 mission analysis: Plasma brake experiment for deorbiting. In Proceedings of the 67th International Astronautical Congress (IAC), Guadalajara, Mexico, 26–30 September 2016; IAF: Paris, France, 2016. [Google Scholar]
- Orsini, L.; Niccolai, L.; Quarta, A.A.; Mengali, G. Plasma brake model for preliminary mission analysis. Acta Astronaut. 2017, 144, 297–304. [Google Scholar] [CrossRef]
- Bombardelli, C.; Baú, G.; Peláez, J. Asymptotic solution for the two-body problem with constant tangential thrust acceleration. Celest. Mech. Dyn. Astron. 2011, 110, 239–256. [Google Scholar] [CrossRef] [Green Version]
- Niccolai, L.; Quarta, A.A.; Mengali, G. Solar sail trajectory analysis with asymptotic expansion method. Aerosp. Sci. Technol. 2017, 68, 431–440. [Google Scholar] [CrossRef]
- Niccolai, L.; Quarta, A.A.; Mengali, G. Two-dimensional Heliocentric Dynamics Approximation of an Electric Sail with Fixed Attitude. Aerosp. Sci. Technol. 2017, 71, 441–446. [Google Scholar] [CrossRef]
- Janhunen, P. Coulomb drag devices: Electric solar wind sail propulsion and ionospheric deorbiting. arXiv 2014, arXiv:1404.7430. [Google Scholar]
- Peláez, J.; Hedo, J.M.; de Andrés, R. A special perturbation method in orbital dynamics. Celest. Mech. Dyn. Astron. 2007, 97, 131–150. [Google Scholar] [CrossRef] [Green Version]
- Niccolai, L.; Quarta, A.A.; Mengali, G. Trajectory Approximation of a Solar Sail with Constant Pitch Angle and Optical Degradation. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3643–3649. [Google Scholar] [CrossRef]
- Mengali, G.; Quarta, A.A. Solar sail trajectories with piecewise-constant steering laws. Aerosp. Sci. Technol. 2009, 13, 431–441. [Google Scholar] [CrossRef]
- Rauhala, T.; Seppänen, H.; Ukkonen, J.; Kiprich, S.; Maconi, G.; Janhunen, P.; Hæggström, E. Automatic 4-wire Heytether production for the electric solar wind sail. In Proceedings of the International Microelectronics Assembly and Packing Society Topical Workshop and Tabletop Exhibition on Wire Bonding, San Jose, CA, USA, 21–22 January 2014. [Google Scholar]
- Hedin, A.E.; Salah, J.E.; Evans, J.V.; Reber, C.A.; Newton, G.P.; Spencer, N.W.; Kayser, D.C.; Alcaydé, D.; Bauer, P.; Cogger, L.; et al. A global thermospheric model based on mass spectrometer and incoherent scatter data 1. N2 density and temperature. J. Geophys. Res. 1977, 82, 2139–2147. [Google Scholar] [CrossRef]
- Hedin, A.E.; Reber, C.A.; Newton, G.P.; Spencer, N.W.; Brinton, H.C.; Mayr, H.G.; Potter, W.E. A global thermospheric model based on mass spectrometer and incoherent scatter data 2. Composition. J. Geophys. Res. 1977, 82, 2148–2156. [Google Scholar] [CrossRef]
- Shampine, L.F.; Reichelt, M.W. The MATLAB ODE Suite. SIAM J. Sci. Comput. 1997, 18, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Shampine, L.F.; Gordon, M.K. Computer Solution of Ordinary Differential Equations: The Initial Value Problem; W. H. Freeman: San Francisco, CA, USA, 1975; Chapter 10. [Google Scholar]
- Bassetto, M.; Niccolai, L.; Quarta, A.A.; Mengali, G. Rapid evaluation of the decay time of a plasma brake-based CubeSat. Aerospace 2022, 9, 636. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | m [kg] | [m] | [V] |
|---|---|---|---|
| spacecraft ① | 1 | 25 | 500 |
| spacecraft ② | 4 | 100 | 1000 |
| spacecraft ③ | 10 | 300 | 1000 |
| Configuration | Numerical | Approximate | Percentage Error |
|---|---|---|---|
| spacecraft ① | |||
| spacecraft ② | |||
| spacecraft ③ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niccolai, L.; Bassetto, M.; Quarta, A.A.; Mengali, G. Trajectory Approximation of a Coulomb Drag-Based Deorbiting. Aerospace 2022, 9, 680. https://doi.org/10.3390/aerospace9110680
Niccolai L, Bassetto M, Quarta AA, Mengali G. Trajectory Approximation of a Coulomb Drag-Based Deorbiting. Aerospace. 2022; 9(11):680. https://doi.org/10.3390/aerospace9110680
Chicago/Turabian StyleNiccolai, Lorenzo, Marco Bassetto, Alessandro A. Quarta, and Giovanni Mengali. 2022. "Trajectory Approximation of a Coulomb Drag-Based Deorbiting" Aerospace 9, no. 11: 680. https://doi.org/10.3390/aerospace9110680
APA StyleNiccolai, L., Bassetto, M., Quarta, A. A., & Mengali, G. (2022). Trajectory Approximation of a Coulomb Drag-Based Deorbiting. Aerospace, 9(11), 680. https://doi.org/10.3390/aerospace9110680