4.1. Performance Characteristics Analysis Based on LPE
The above content explains the design and optimization methods of the DFW unit in detail. Considering the eVTOL aircraft flight performance is closely tied with the DFW unit aerodynamics characteristics, in the conceptual design of the DEP eVTOL aircraft, the design workflow can be remarkably expedited if the optimized DFW unit characteristics are obtained. A rapid calculation method for the performance characteristics of the DFW unit with sufficient accuracy is, therefore, presented and verified, based on which the aerodynamic characteristics of LPE can be generated and involved in the conceptual design approach.
The simulation results of the DFW unit using the virtual disc with momentum sources are compared with that involving the actual blade thoroughly, and their strong consistency can be concluded. After that, the DFW unit simulation results can be converted to coefficients on the vertical meridian plane, that is, the characteristics of LPE. Then these coefficients are compared with that from the virtual disc with momentum sources, and their consistency can also be concluded. Consequently, the DEP eVTOL aircraft conceptual design approach can be improved by consulting the LPE aerodynamics results from the virtual disc momentum source method.
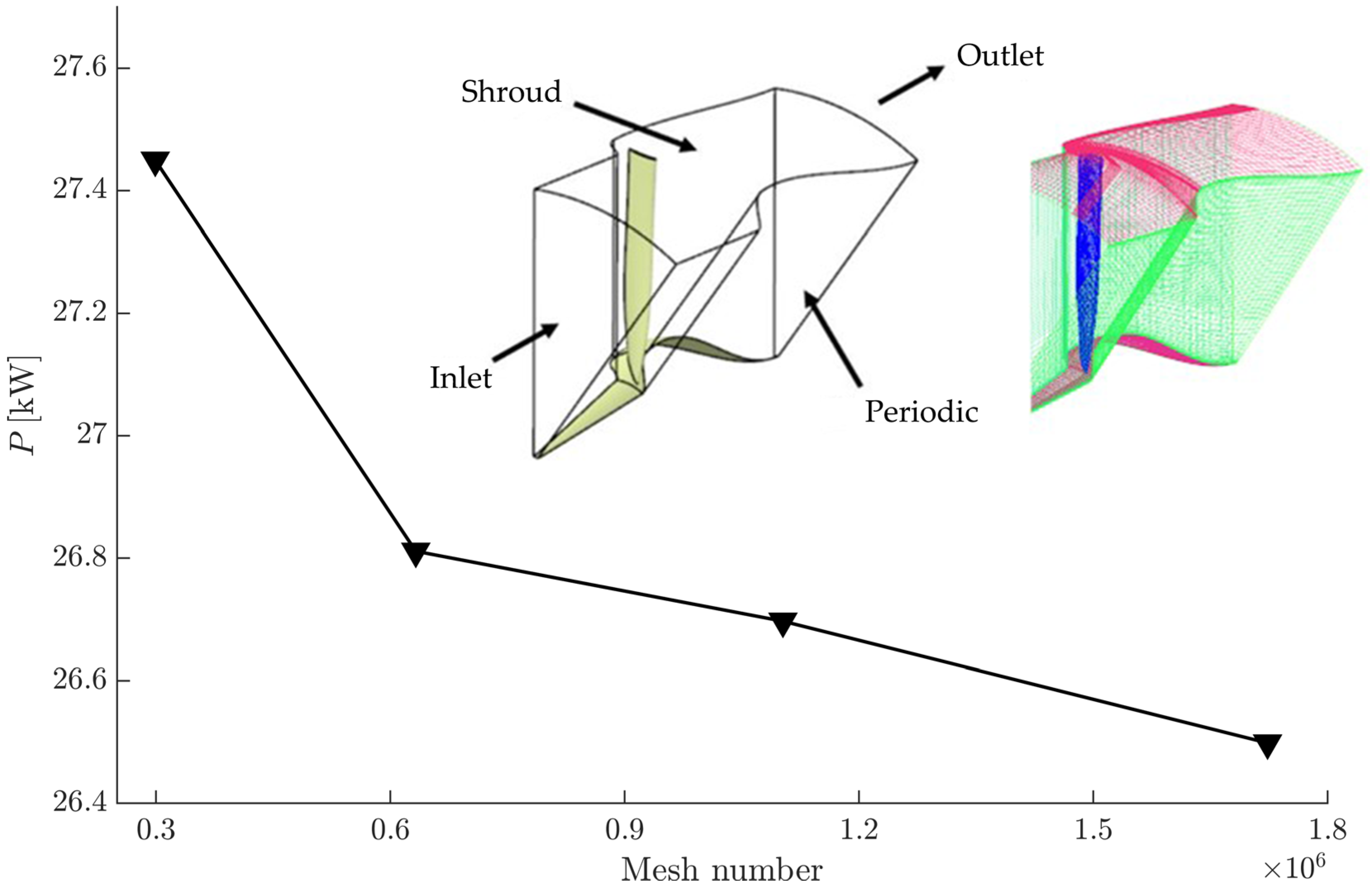
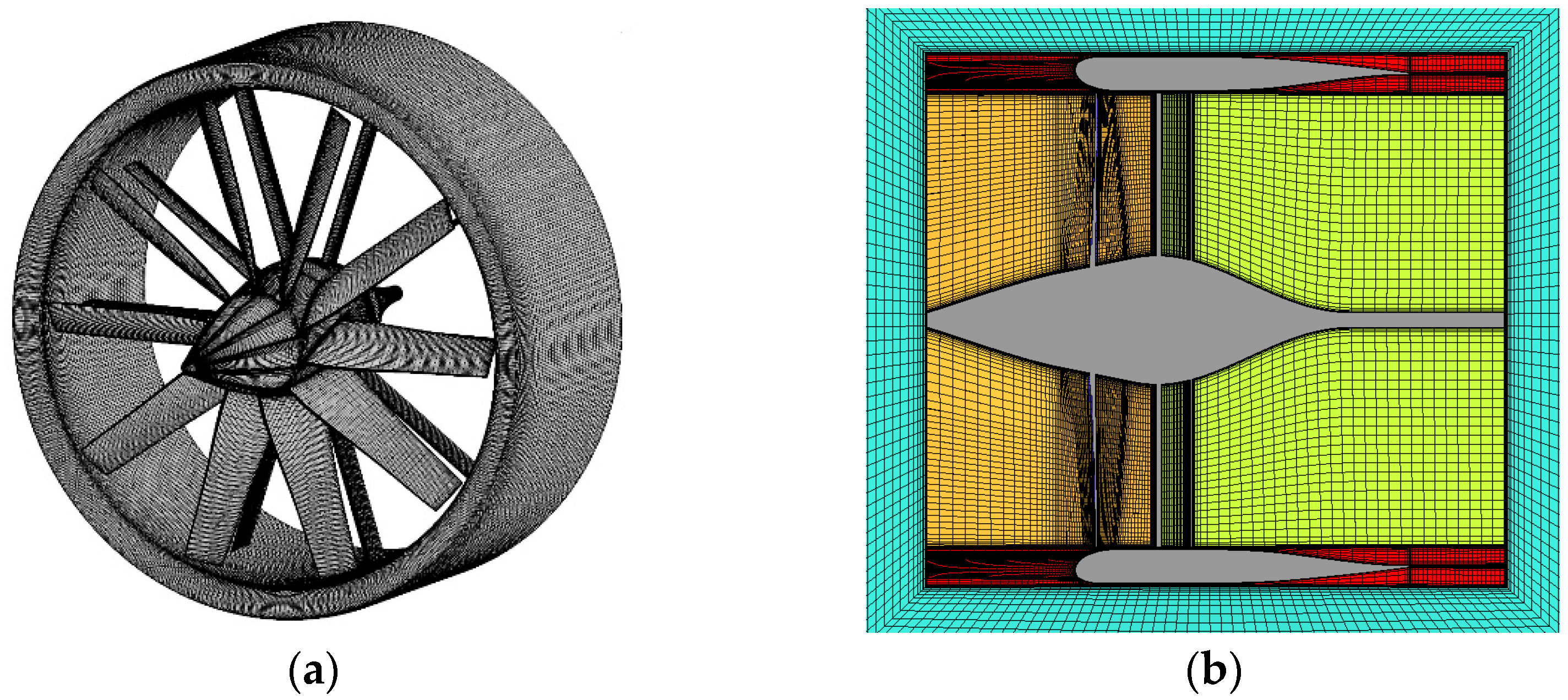
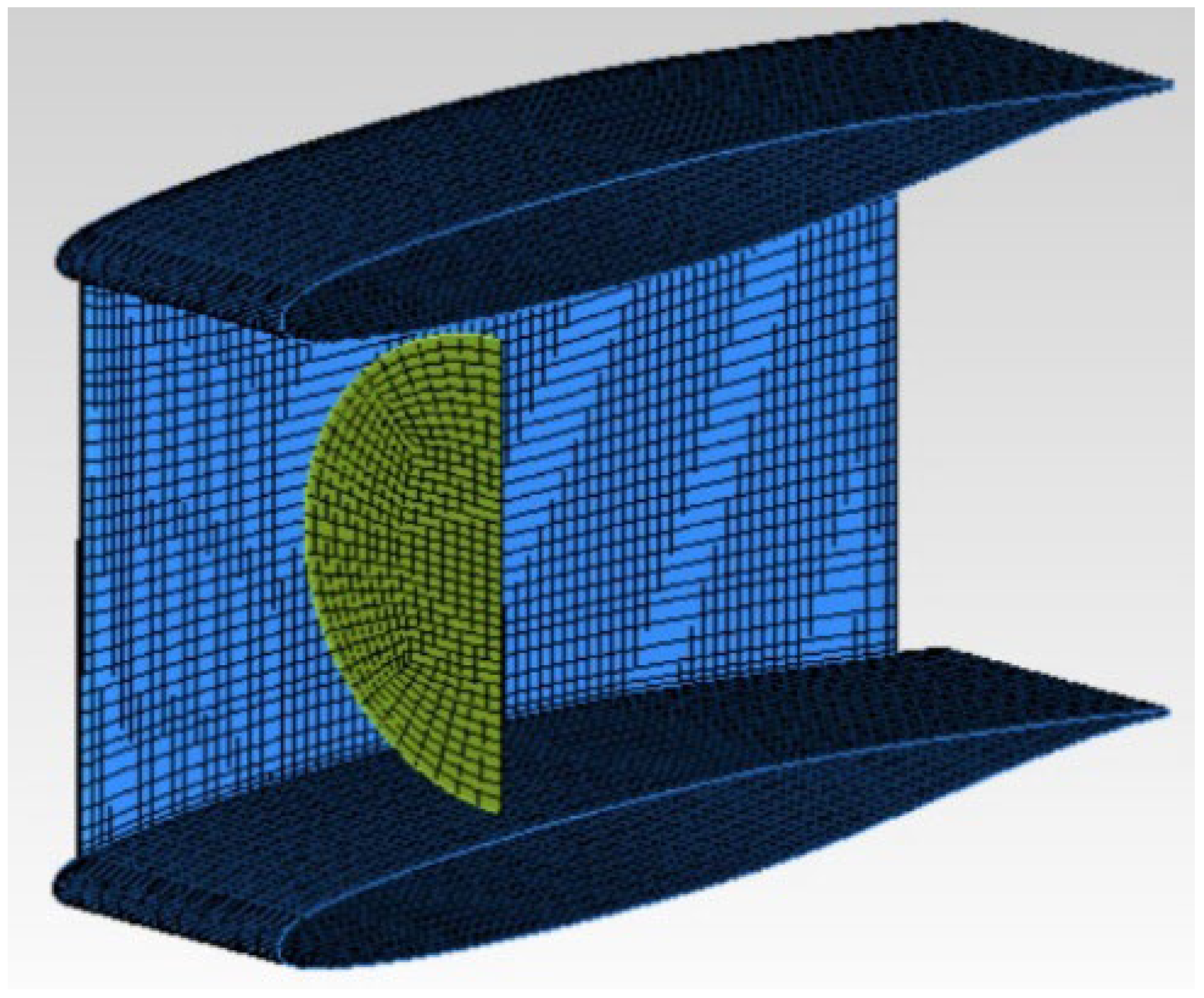
The lift and drag of the half DFW unit using the virtual disc are solved. The virtual disc with momentum sources replaces the effects of the ducted fan. The other simulation parameters are consistent with the former simulation using actual blades. The mesh of half DFW unit simulation using the virtual disc is shown in
Figure 18. The standard atmospheric model parameters at an altitude of 10 km are adopted. The flight velocity is 600 km/h, and the value of the pressure step is set to 818Pa on the momentum disc mesh.
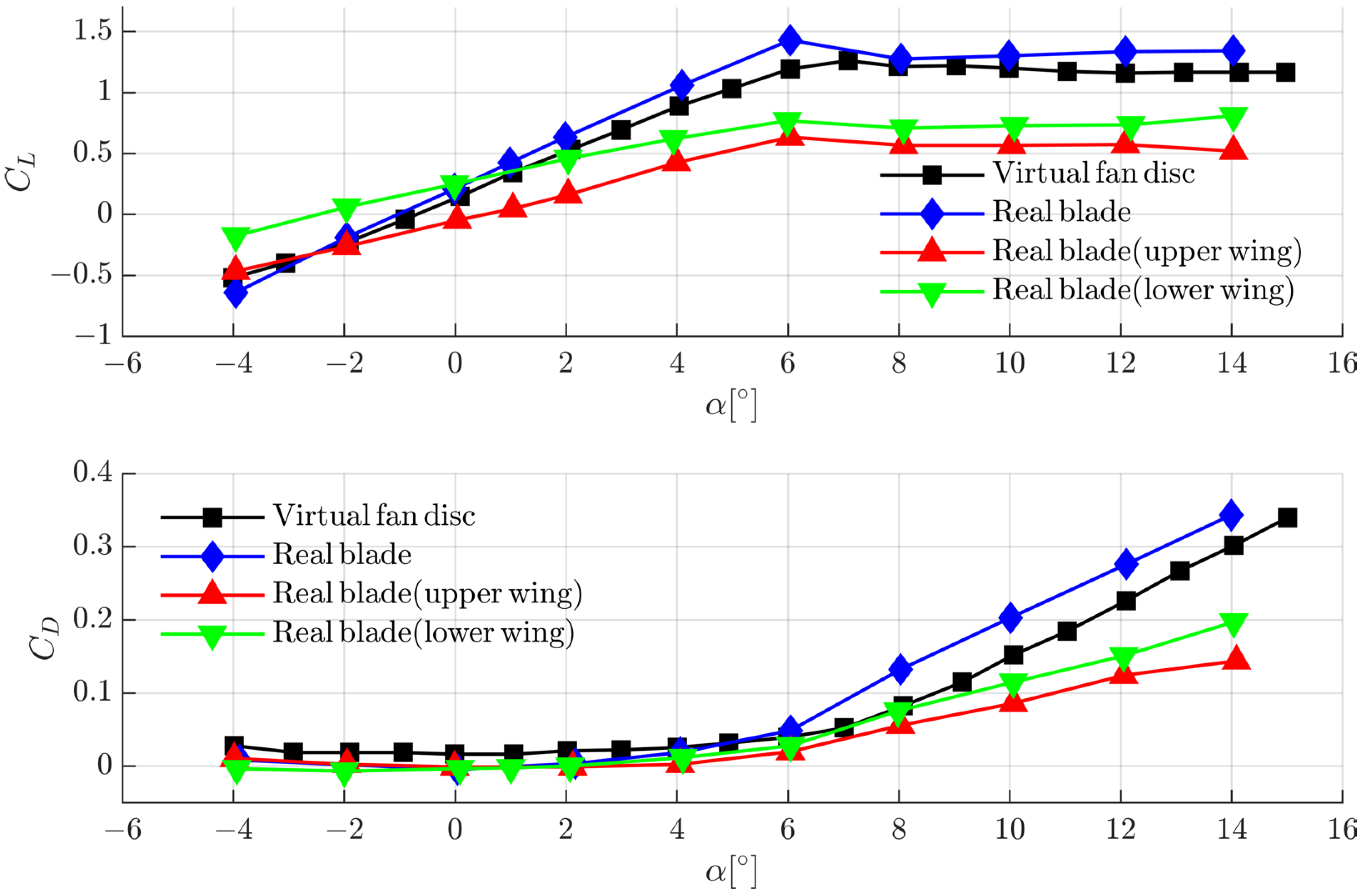
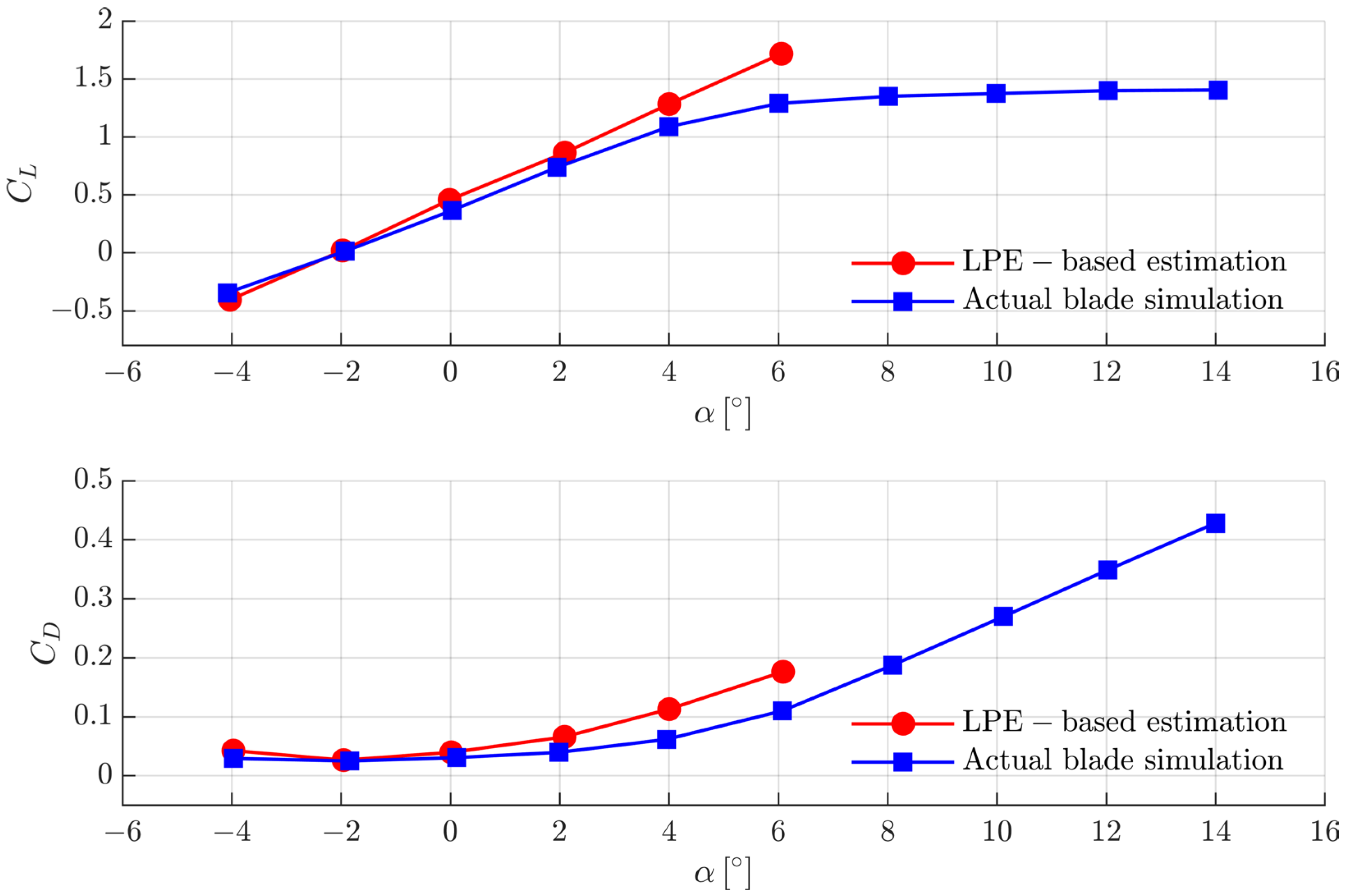
In the cruise conditions of the DFW unit simulation, the lift-and-drag coefficients comparison between the actual blade and the momentum disc are shown in
Figure 19. The close trend and the marginal numerical difference of the coefficients demonstrate the consistency of the actual blade and the momentum disc.
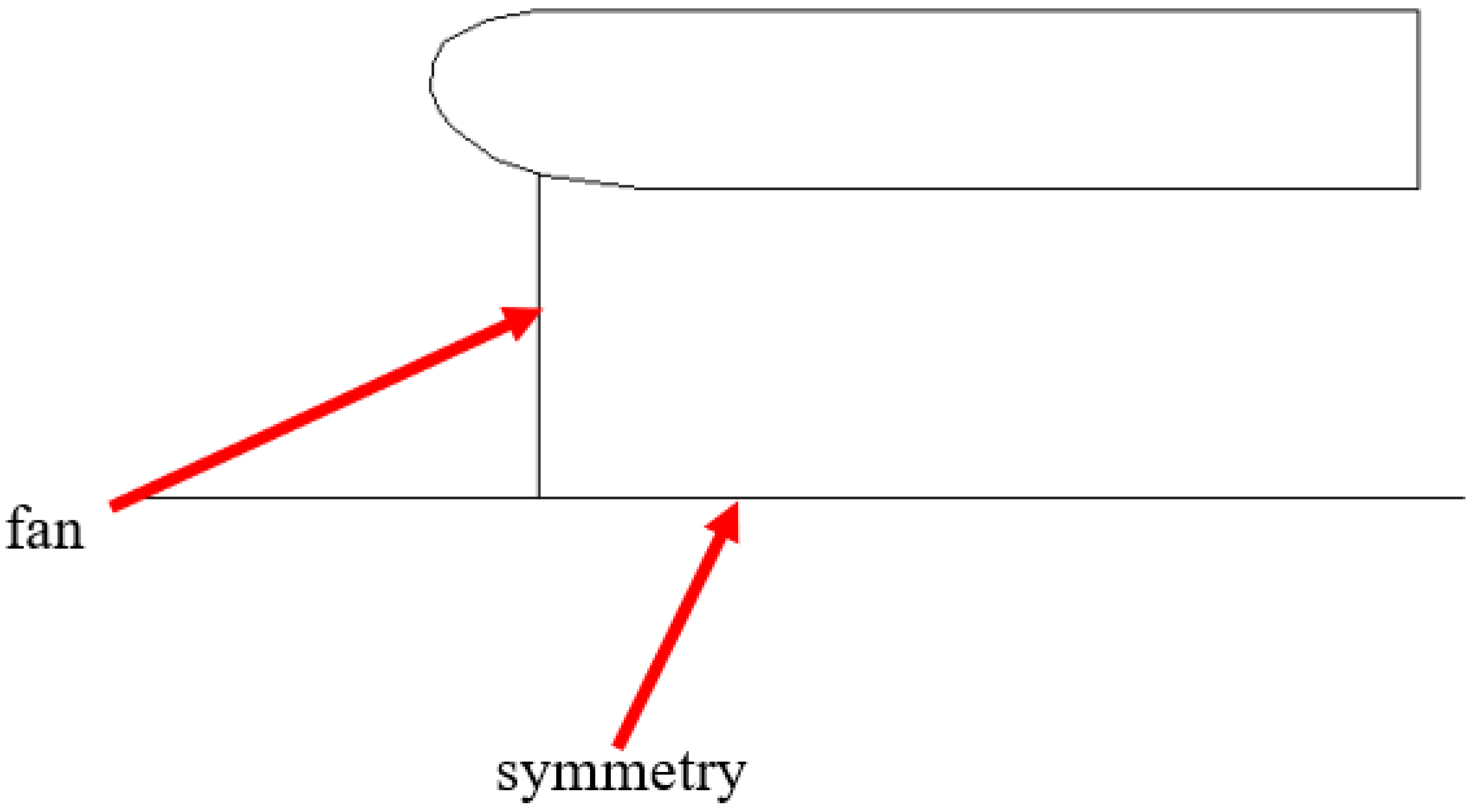
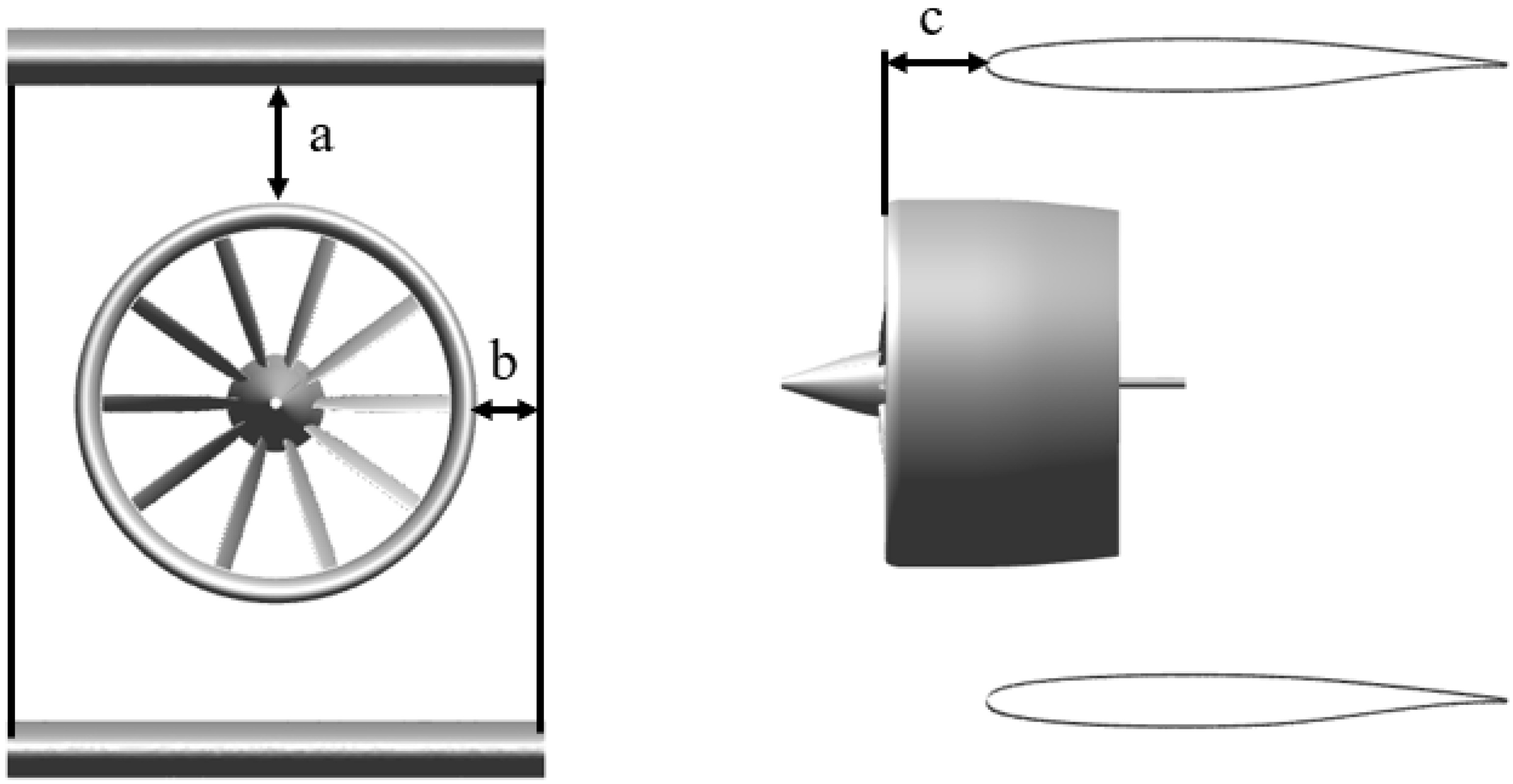
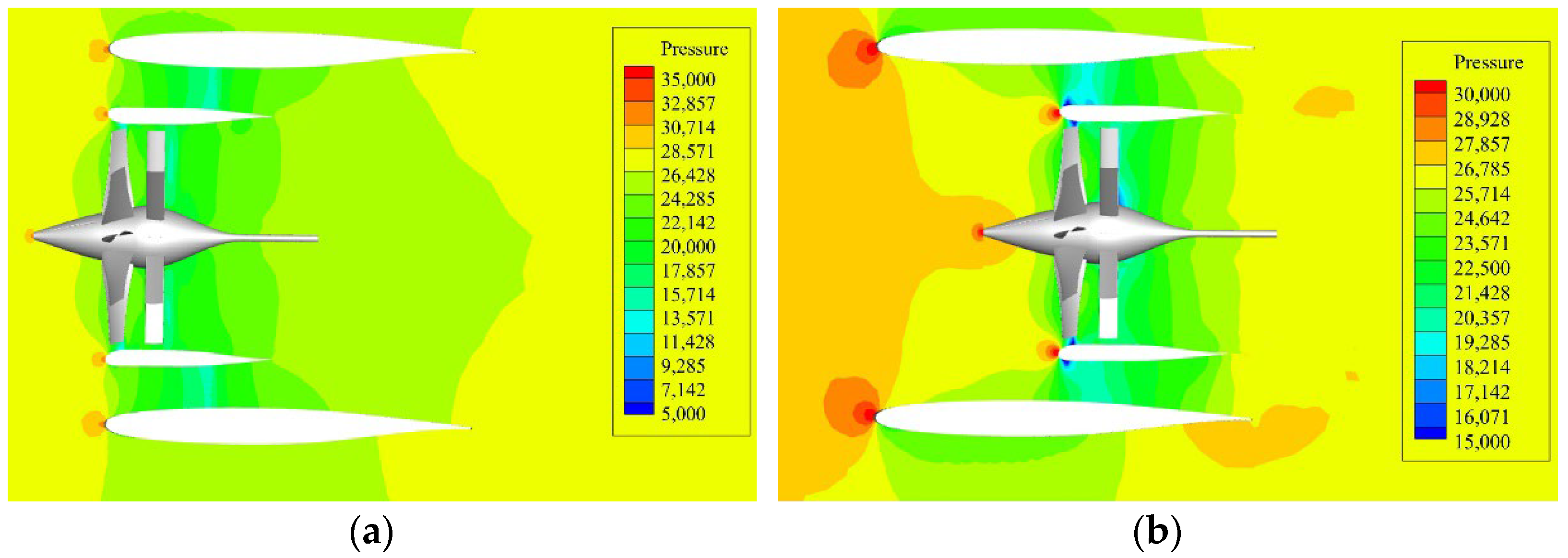
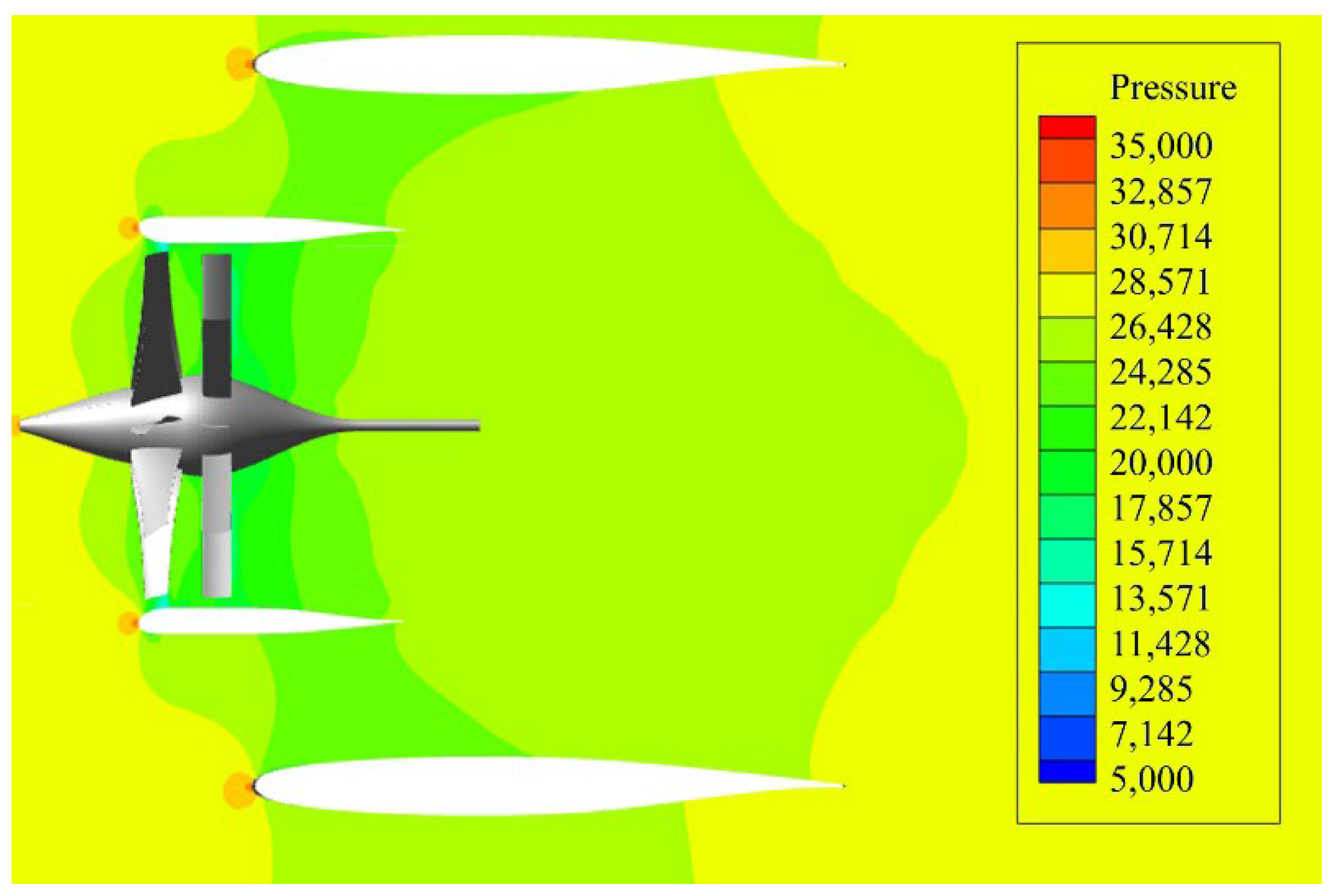
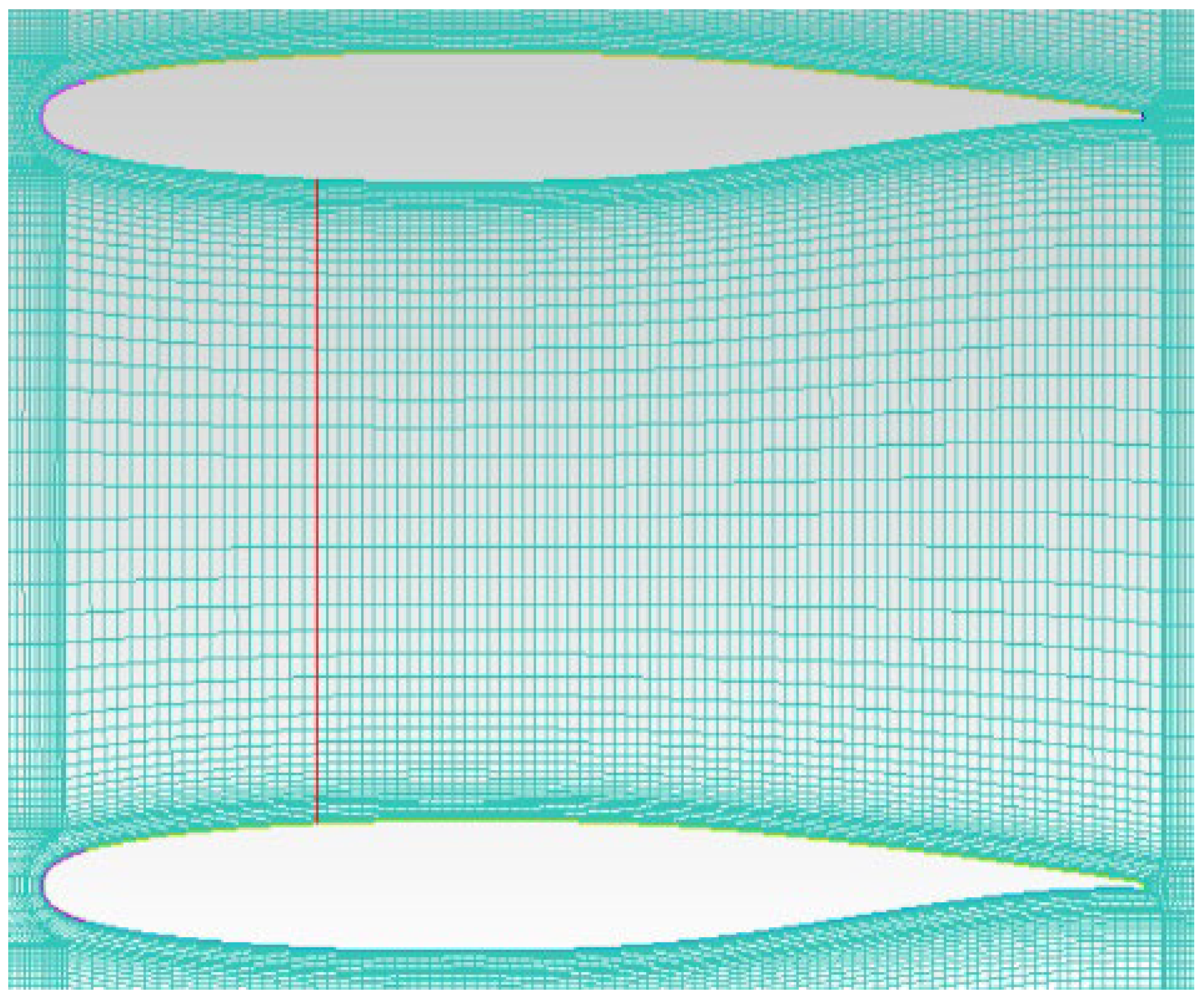
In the DFW vertical meridional plane simulation, the 2D fan boundary is adopted to represent the pressure step generated by the ducted fan between the upper and lower wings. The mesh of the 2D simulation is shown in
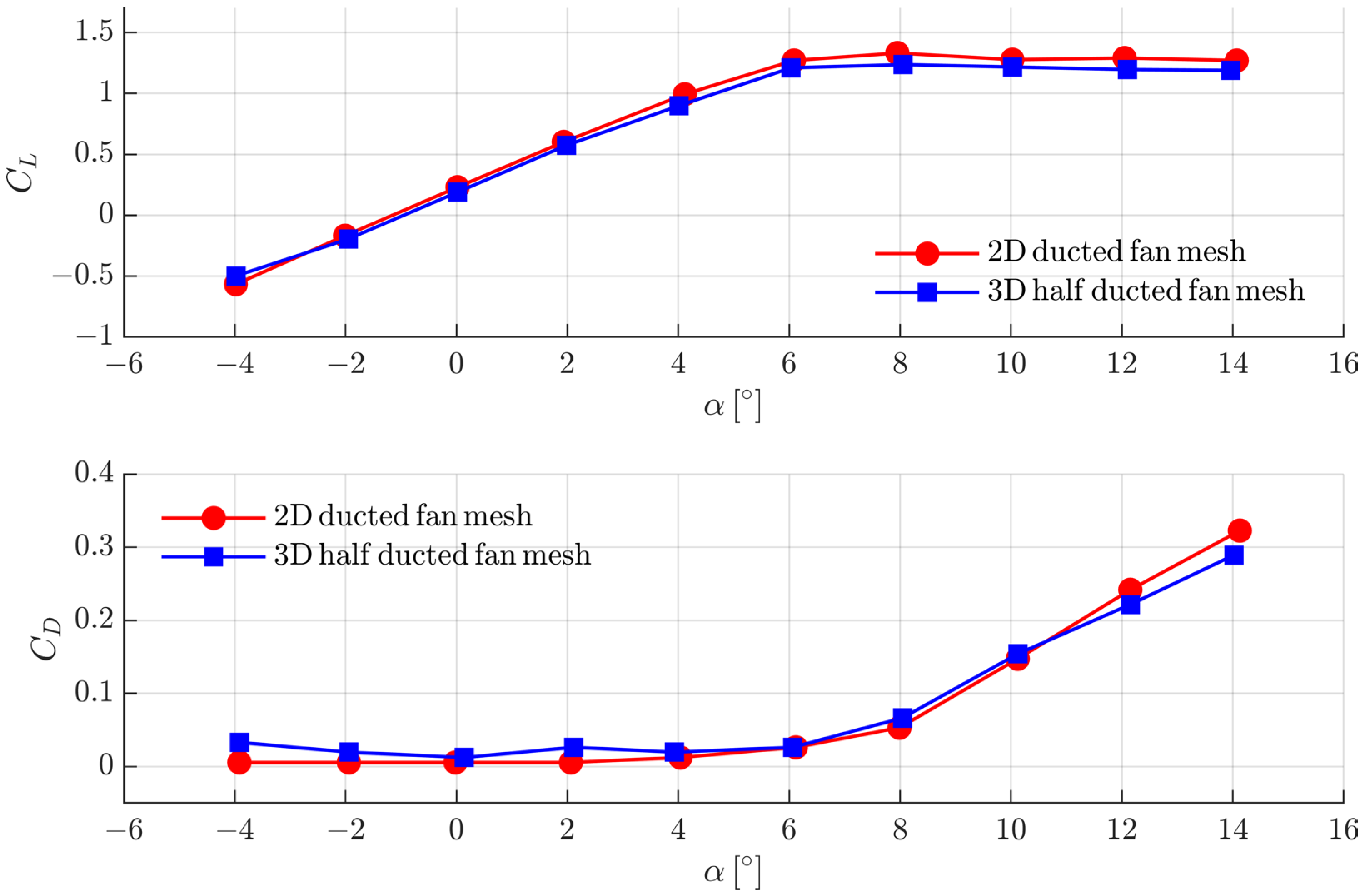
Figure 20. The results comparison between the 2D and half 3D model is shown in
Figure 21.
Despite the wall boundary being simplified, the aerodynamic characteristics of both wings affected by the airflow from far-field and slipstream induced by the ducted fan can still be simulated, and their aerodynamic characteristics agree well. The 2D simulation can be used to design the geometric parameters, including the airfoils, chord length, incidence angle, and the vertical distance between both wings, without the participation of an integral ducted fan. The internal and external flow features of DEP eVTOL aircraft in high-speed forward flight can be considered by involving 2D DFW unit characteristics on the vertical meridian plane.
The only minor difference between the dimensionless aerodynamic coefficients of the above two simulations also demonstrates the apparent span independence of these characteristics. The data consistency between the virtual momentum disc and the real blade proves the justices of the proposed LPE idea, that is, to represent the 2D aerodynamics of the DFW unit on a vertical meridian plane. Therefore, the LPE can provide accurate aerodynamic features for establishing a novel DEP eVTOL aircraft conceptual design approach.
4.3. Application on a DEP eVTOL Conceptual Design
The establishment of the DEP eVTOL aircraft conceptual design approach based on the 2D simulation results of the LPE can effectively solve the question of tight coupling and inefficient iteration when using the traditional method.
According to the existing aircraft performance and applications of high-speed VSTOL, the performance requirement of the DEP eVTOL aircraft is proposed, as shown in
Table 9.
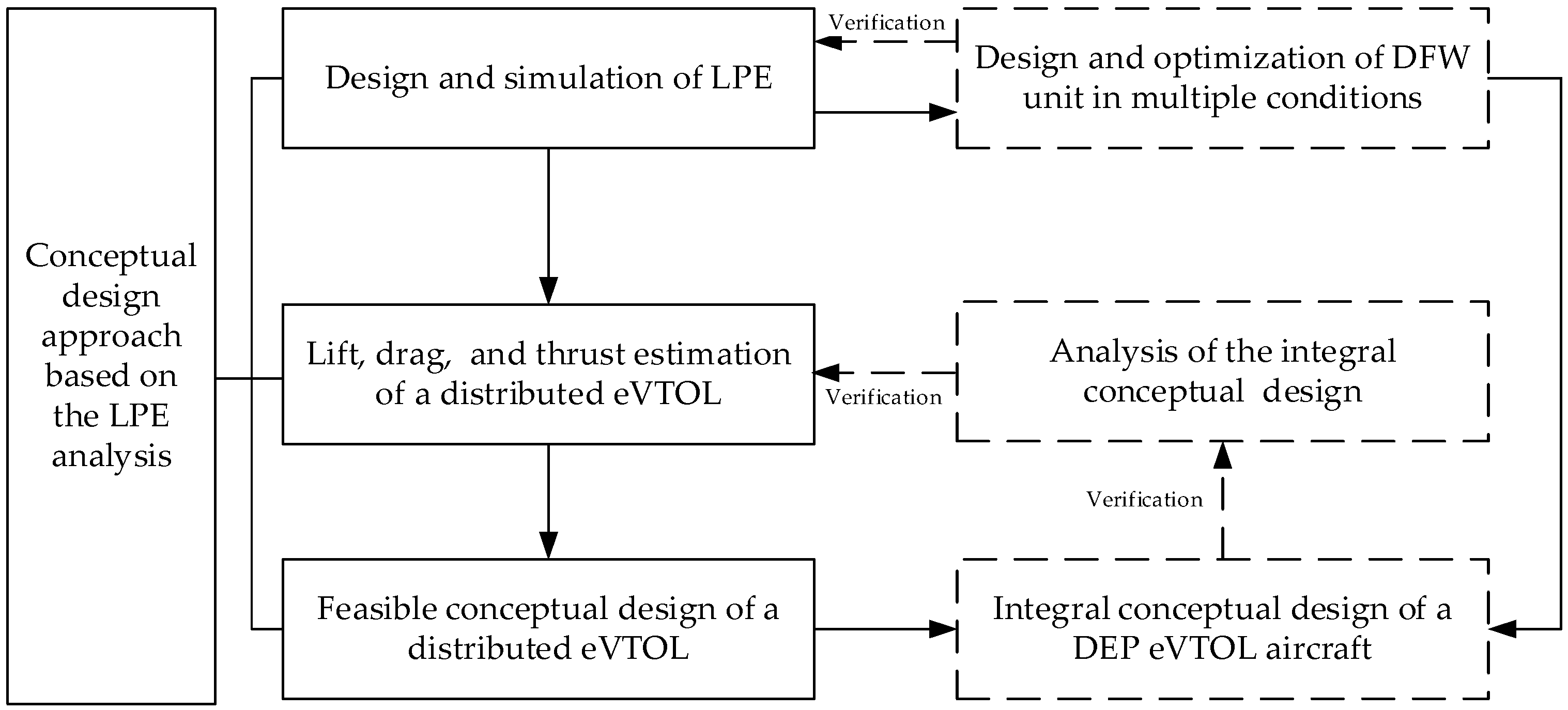
The design process of the LPE includes the selection of two airfoils, the incidence angles, and the vertical distance. The aerodynamic performance of various planes can be obtained efficiently, which effectively benefits the rapid trade-off of the DEP eVTOL aircraft conceptual design. The flow chart of the investigation of the novel conceptual design approach is drawn in
Figure 24.
The advantages of the DEP eVTOL are mainly in the high hover efficiency and high cruise aerodynamic efficiency. The ducted fans equipped can maintain a high-power loading of the system. The span length of the wing is unutilized to arrange sufficient disc area, which benefits the disc loading of the eVTOL in a reasonable range to guarantee the propulsion efficiency of the ducted fan.
For the canard configuration in this study, the minor trim cost resulting from features of positive canard lift also helps to ensure a high lift-to-drag ratio. Based on the exploration of the DEP system, the canard configuration, and the DFW unit optimization, the obtained DEP eVTOL aircraft satisfies the high-performance requirement. The wing area and aspect ratio are determined according to the above coefficient estimation and weight sizing. The wing area and the number of DFW units of the canard and main wings are considered comprehensively base on the position of the thrust center, gravity center, and aerodynamic center. The spanwise 18 DFW units eventually construct the main wing, and the canard wing consists of 6 DFW units spanwise.
In this study, the design requirement of the conceptual design includes: the maximum flight speed exceeding 700 km/h; the maximum hover efficiency exceeding 75%; the lift-to-drag ratio in cruise is larger than 10; the proportion of the fuel and payload shall not be less than 40% of take-off weight; and that of payload shall not be less than 15%.
The regressive approach of weight proportion is used to calculate the ecoefficiency of fuel weight, payload weight, and empty weight. The fuel weight is obtained based on the fuel coefficient in eight phases of the mission profile. Some important inputs of the estimation include:
In the climbing phase: the climbing height is 10 km; the climb rate is 13.3 m/s; the lift-to-drag ratio is 8; propulsion efficiency is 0.65; the fuel consumption is 0.28 kg/(kW·h).
In the cruising phase: the flight range is 3200 km; the lift-to-drag ratio is 10; propulsion efficiency is 0.85; fuel consumption is 0.28 kg/(kW·h).
The proportion of fuel weight to take-off weight is calculated as 0.2993. The fuel weight of 1800 kg and take-off weight of 6000 kg can be obtained through an iteration.
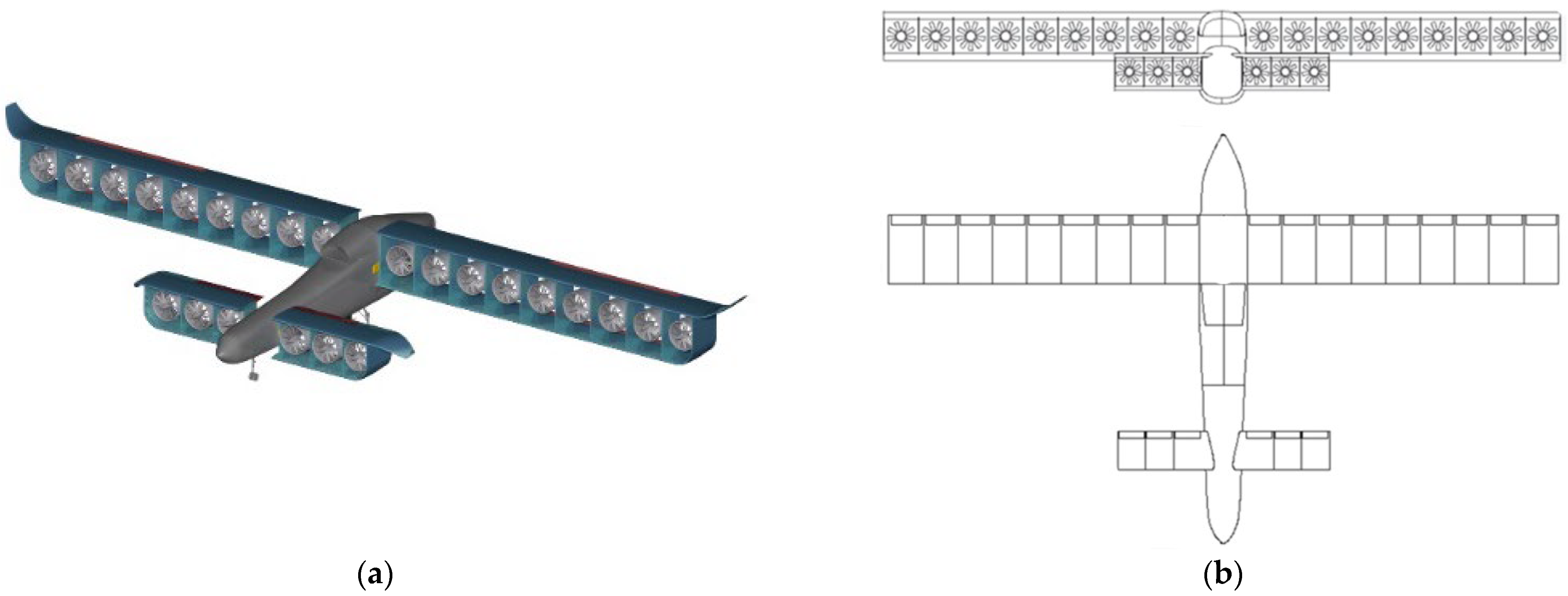
The geometric parameters and weight of the conceptual design are determined according to the lift, drag, and thrust coefficients of the DFW units, as shown in
Table 10. The conceptual design of the DEP eVTOL is presented in
Figure 25.
The above 2D plane aerodynamic data is applied to analyze its corresponding DEP eVTOL aircraft. The aerodynamic estimation of the conceptual design based on the data in
Figure 21 is estimated as follows.
The aerodynamic estimation of the conceptual design is from [
26]. In
Figure 21, the slope of the lift coefficient curve is 0.1783, and the intercept is 0.1585. The wing’s incidence angle is set to 1° to maintain the lift coefficient in the cruise. The lift coefficient of the wing is:
The canard lift coefficient is converted into part of the whole aircraft according to its area and aerodynamic efficiency. The incidence angle of the canard is set to 2.3° to trim the aircraft at a positive angle. The lift coefficient of the canard is:
The lift coefficient equation of the eVTOL is:
In
Figure 21, the zero-lift-drag coefficient of the wing is 0.02, and that of the canard is 0.0037, using the same constant transformation as lift. According to the empirical formula, the zero-lift-drag coefficient is
. Amplify 1.1 times for considering interference drag. The zero-lift-drag coefficient of the eVTOL is:
The induced drag of the eVTOL is:
In the equation, , and .
The drag coefficient equation of the eVTOL is:
The gravity center of the eVTOL is 5 m after the foremost point of the fuselage. In cruise mode, the thrust line of the canard is through the gravity center, so the pitching moment generated by the wing thrust is . The pitching moment produced by lift can be obtained from its distribution, which is and . The pitching moment of the fuselage is obtained by Surface Panel Method, which is .
The pitching-moment coefficient equation of the eVTOL is:
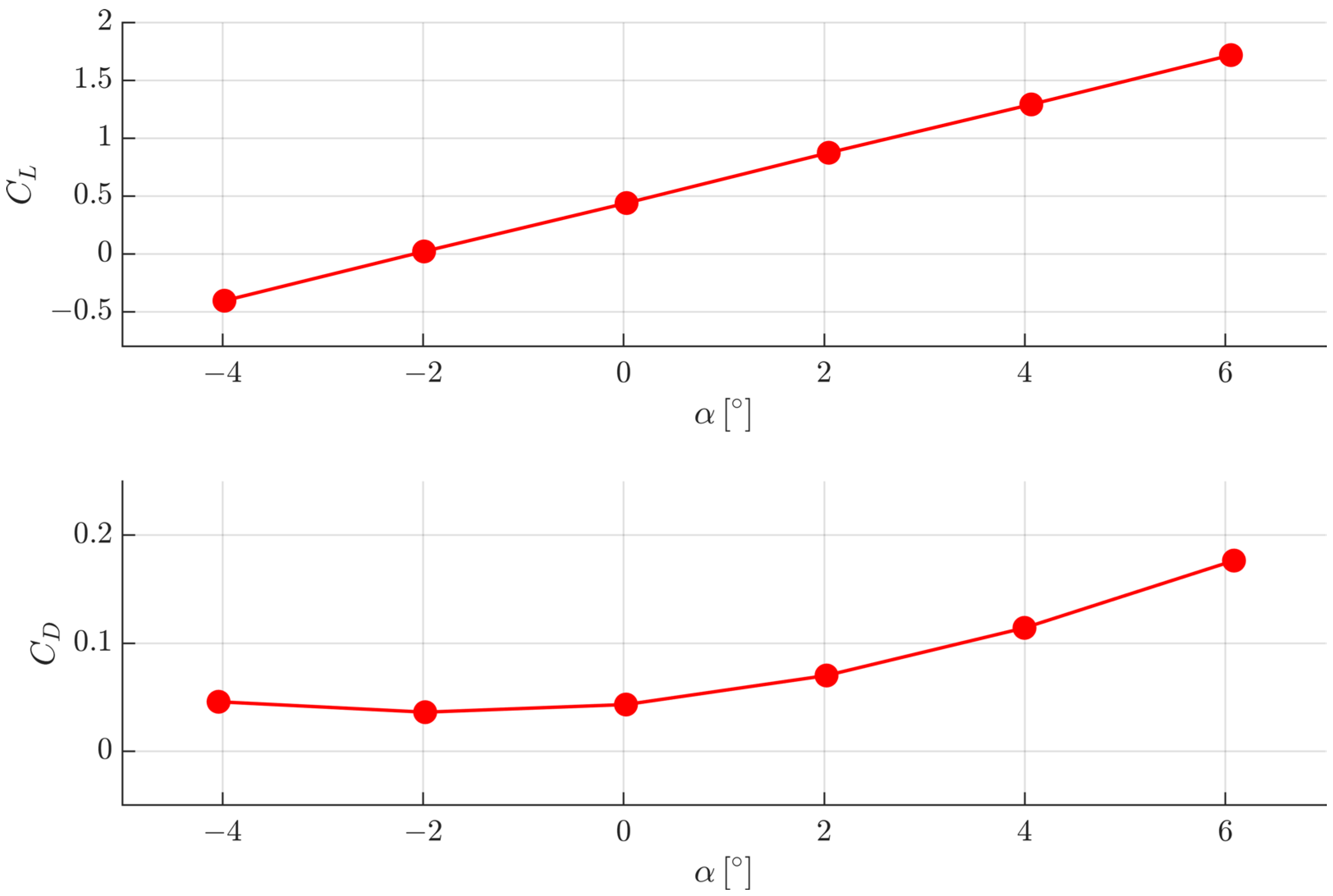
The curves of estimated aerodynamic characteristics are shown in
Figure 26.
The cruise lift coefficient is achieved near the zero AoA, where the lift-to-drag ratio reaches 10.21. The pitching moment coefficient is −0.014, near the trim point. Hence, in the conceptual design, according to the aerodynamic and propulsion characteristics, the minimum, cruise, and maximum airspeed can be calculated as shown in
Table 11, regardless of the DFW unit arrangement.
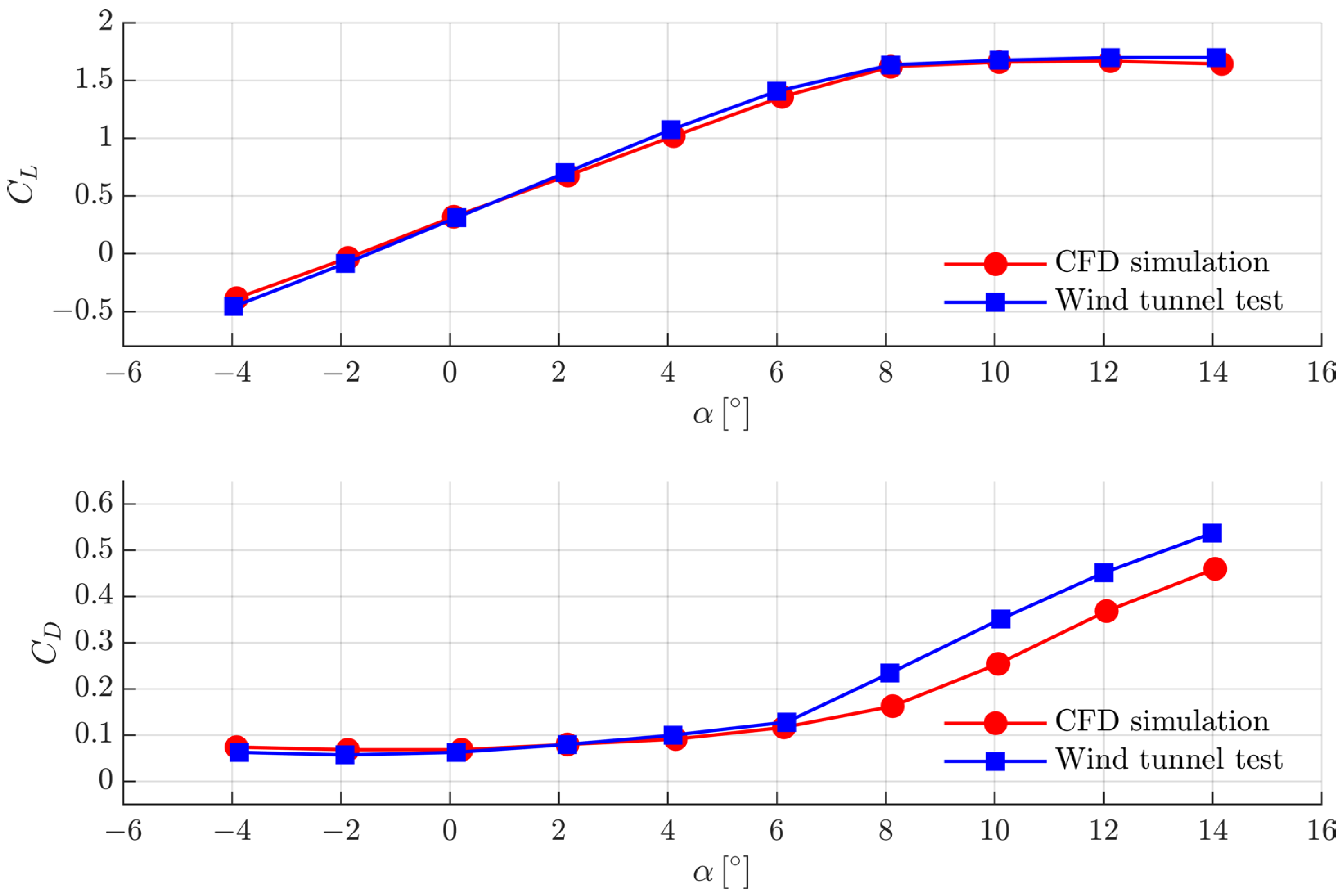
The total estimated lift-and-drag coefficients after the conceptual design are compared to the CFD simulation results, which involve the actual blade model. As shown in
Figure 27, the difference between the estimation and CFD simulation results in the linear-lift AoA region (below 5 deg) is reasonably acceptable (the relative errors within 13%). Therefore, the lift-and-drag estimation from the LPE can strongly support the subsequent conceptual design process while ensuring much less calculation effort. In this study, the conceptual design, based on the LPE estimation, meets the design requirements quite well. As a result, additional design modifications in the detailed design phase can be exempt.



 and
and 



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}