1. Introduction
During the last century, globalization, various financial crises, climate change, and an increasing scarcity of resources have come to represent new challenges for Europe. Governments recognize the necessity of innovation and of a common strategy to keep Europe competitive for the long term. Flightpath 2050 [
1] sets promising but challenging goals for new generations of aircraft, such as reducing CO
and NO
emissions by 75% and 90%, respectively, as well as a 65% noise reduction. Researchers from all over the world are working on reducing emissions and noise, as well as life-cycle concepts for structures and potential improvements in air traffic management. In particular, technologies like active flow control, load alleviation, boundary-layer ingestion, and advanced structures are studied for more sustainable aviation.
Load alleviation is performed with different methodologies via passive or active approaches to have more favorable wing load distribution (to reduce bending moments) and hence structural weight reduction. A lower maximum bending moment allows one to design wings for a lower limit load factor. The techniques implemented for passive load alleviation are nonlinear stiffness material design [
2], viscoelastic damping design [
3], new structural concepts [
4,
5], and, finally, local morphing structures [
2]. Rossow et al. [
6] investigated the feasibility of an aircraft, ideally designed to sustain 1g as maximum load (typical for a cruise mission) and the use of load alleviation to take care of all the loads deviating from this 1g case. Wing mass can be reduced by 60%. Wing flow control represents a methodology for active load alleviation because it is able to reach a more favorable load distribution and, as a consequence, to reduce wing-bending moment. Liu et al. [
7] designed robust control laws for a large, flexible wing with uncertainty in the Mach number and dynamic pressure in order to investigate the active load alleviation by means of a controller. Ying et al. [
8] investigated an active control technique by using piezoelectric actuators to alleviate gust-response loads of a large-aspect-ratio flexible wing. Finally, a dedicated gust load-alleviation system can be based on fluidic or micromechanical flow actuators distributed over the wingspan, able to reach an efficient lift redistribution leading to substantial reductions in wing weight [
9].
Active flow control as a means of wing laminarisation, and, consequently, aircraft drag reduction, can be assessed by different techniques, for example boundary layer suction (BLS). Experimental activities regarding laminar flow control (LFC) applied on aircraft date back to the 1930s [
10]. The so-called natural laminar flow (NLF) airfoils are airfoils implemented to passively reach laminar flow, generally over the forward aeroplane lifting surfaces. Considering a limited leading-edge sweep angle, generally lower than 18 degrees, local pressure initially decreases over the surface for a leading-trailing edge direction. In order to keep the laminar flow in the rearward region and avoid early transition, triggered by instabilities due to the adverse pressure gradient, active flow control techniques are implemented. For these reasons, in the last few decades, scientific research was mainly addressed by a combination of the two approaches described, defined as hybrid laminar flow control (HLFC) [
11]. More recently, Boeing has mounted an HLFC system for the horizontal and vertical tail of its B787-9, and benefits are reported as significant [
12]. HLFC is characterised by natural laminar flow as a limited portion of the airfoil, whereas the remaining desired laminarisation is extended through BLS. Beck et al. [
13] studied a midrange forward-swept wing configuration with an 80% laminar flow wing and a 70% laminarised fuselage, with a potential for fuel burn reduction up to 47%. Sudhi et al. performed a 2D optimisation for airfoil shape design to minimise drag and power absorbed by BLS for a subsonic unswept wing [
14]. The HLFC optimised airfoil, with onset suction fixed at 50%, gives a parasite drag reduction of 31%. Design optimziation of a fully electric regional aeroplane with HLFC is studied in [
15], showing a reduction of profile drag of more than 38% achieved by using BLS. In addition, HLFC is also applied to a transonic swept wing for airfoil design; in detail, the optimised HLFC section may reduce 43% of profile drag with respect to the airfoil optimised for NLF [
16].
In the literature, different frameworks are designed for wing aerostructural optimisation. Aerostructural analysis cannot be properly treated with low-fidelity tools; in fact, the wing weight estimation will not take into account the flexibility of the wing itself due to the aerodynamic loads. Generally, high-fidelity tools are used, as in Liem et al. [
17], for structural wing analysis through the finite element analysis tool, whereas the aerodynamic part is studied for an inviscid and incompressible flow, the data for which are used to build a surrogate model. The computational time for the high-fidelity level may be not affordable and requires proper parallelisation. High-fidelity analysis becomes a relevant approach when the basic parameters are available and aircraft components need to be improved for specific effects. However, this solution implies high computational power and cost (for a complete overview of the fidelity layers, see [
18]).
For these reasons, the use of medium-fidelity but physics-based analysis methods represent a promising approach and tradeoff between a low-fidelity design with low computational power and the most advanced analysis, the cost of which may not be affordable. This research aims to present a medium-fidelity but physics-based analysis and optimisation framework for wing aerostructural optimisation, developed and applied to investigate the advantages of the mentioned novel technologies on aircraft energy efficiency. The use of a gradient-based optimisation allows the use of a large number of design variables with good accuracy and low computational time; to facilitate a gradient computation, the coupled adjoint sensitivity analysis method [
19] is implemented. The main focus is given to the active flow control, in particular the different level of wing laminarisation through a drag penalty model, and the use of different load cases to simulate future scenarios in which aircraft would be allowed to fly at different maximum load factors (potentially lower than the current 2.5 g [
20]) thanks to the load-alleviation technology that will sustain the possible higher loads, similar to the idea researched in [
6]. Considering the transonic regime of the aircraft, the possibility of aileron reversal conditions and static divergence needs to be considered. Flutter divergence is not taken into account because of the medium-fidelity framework, and the condition needs to be verified for a more advanced fidelity level. Two different aircraft are analyzed, a backward- and forward-swept midrange aircraft developed in the Cluster of Excellence SE
2A (Sustainable and Energy-Efficient Aviation) [
2]. The SE
2A is an interdisciplinary research center developed in Germany to pursue the abovementioned objectives by investigating different technologies.
Finally, the current research is focused on the following:
the development of a midfidelity adjoint, gradient-based, aerostructural optimisation framework able to take into account novel technologies and nonconventional aircraft configuration for sustainable application, like fuel weight minimisation;
the understanding of the limitations present in both aircraft configurations and the role of the aeroelastic constraints;
sensitivity studies for the optimisation key parameters; and
evaluation of how fuel weight minimisation may be influenced by the technologies and the optimised variables.
The present work is divided into several sections.
Section 2 focuses on the SE
2A midrange aircraft, and
Section 3 clarifies the aerostructural analysis.
Section 4 explains the multidisciplinary design optimisation, and
Section 5 presents all the results of the study. In the last section, conclusions are defined.
2. SE2A Midrange Aircraft
This study is applied to the midrange aircraft design of the Research Cluster of Excellence Sustainable and Energy Efficient Aviation [
21]. This aircraft is designed with the top-level requirements selected similarly to the reference A320, summarised in
Table 1.
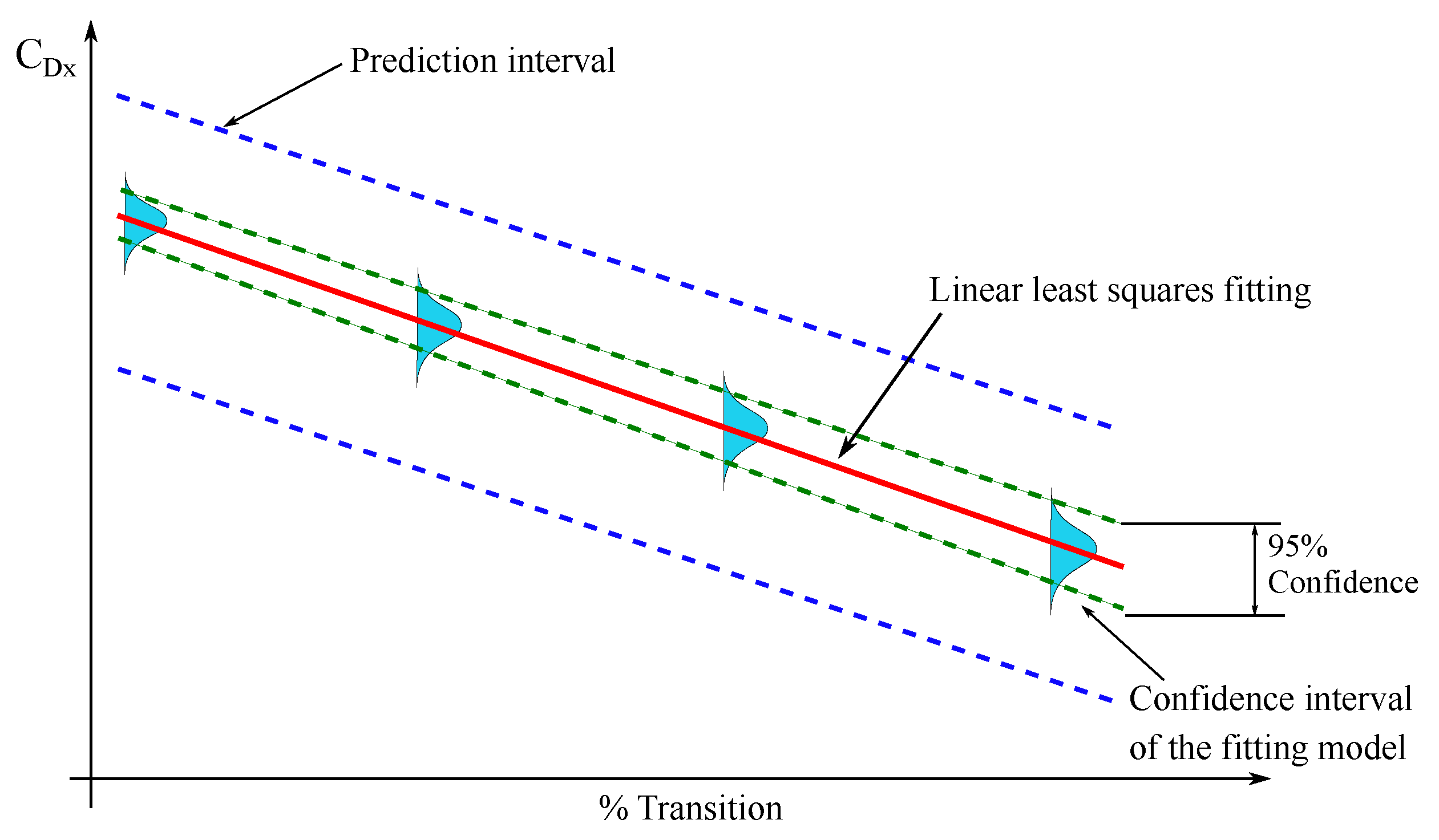
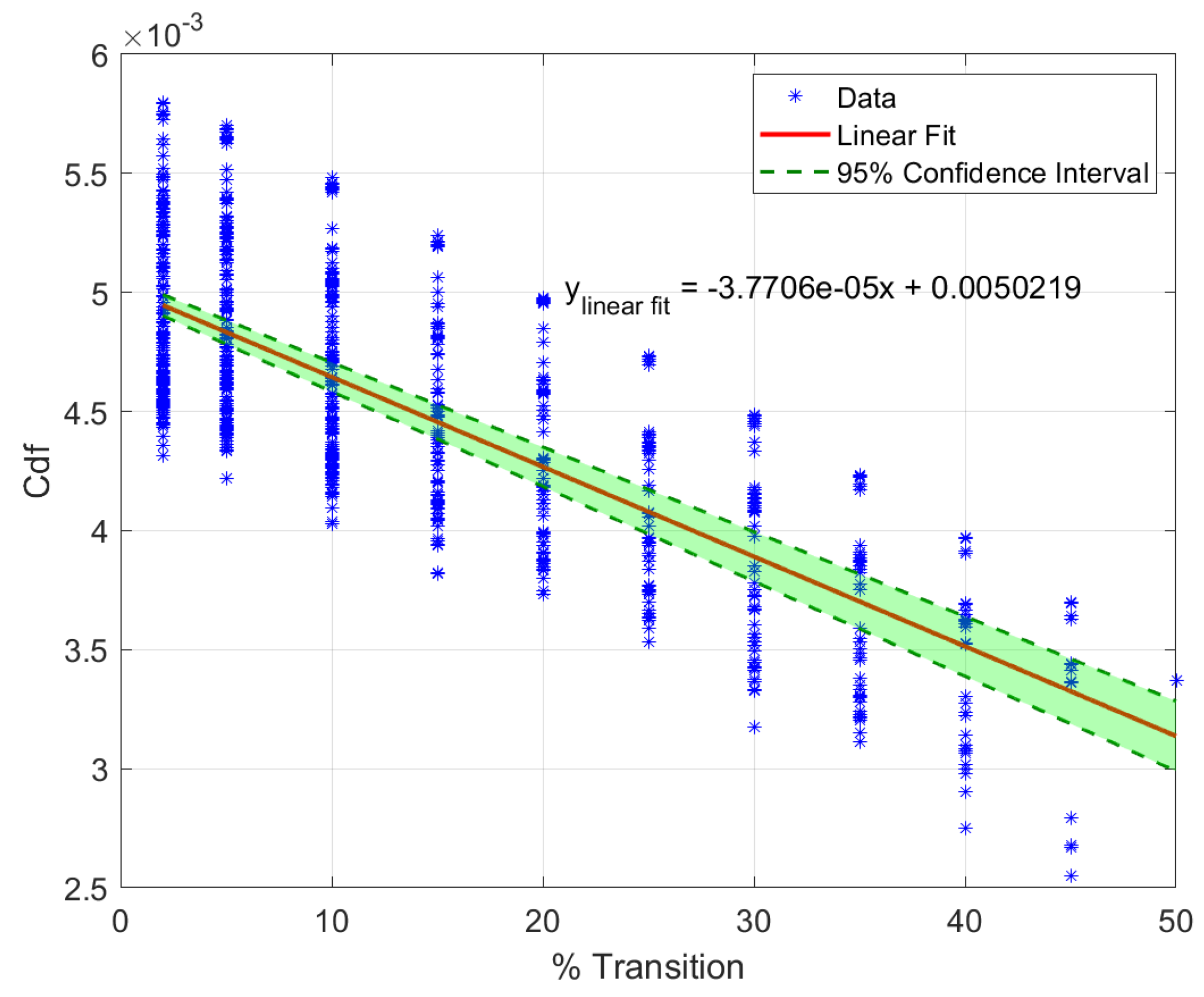
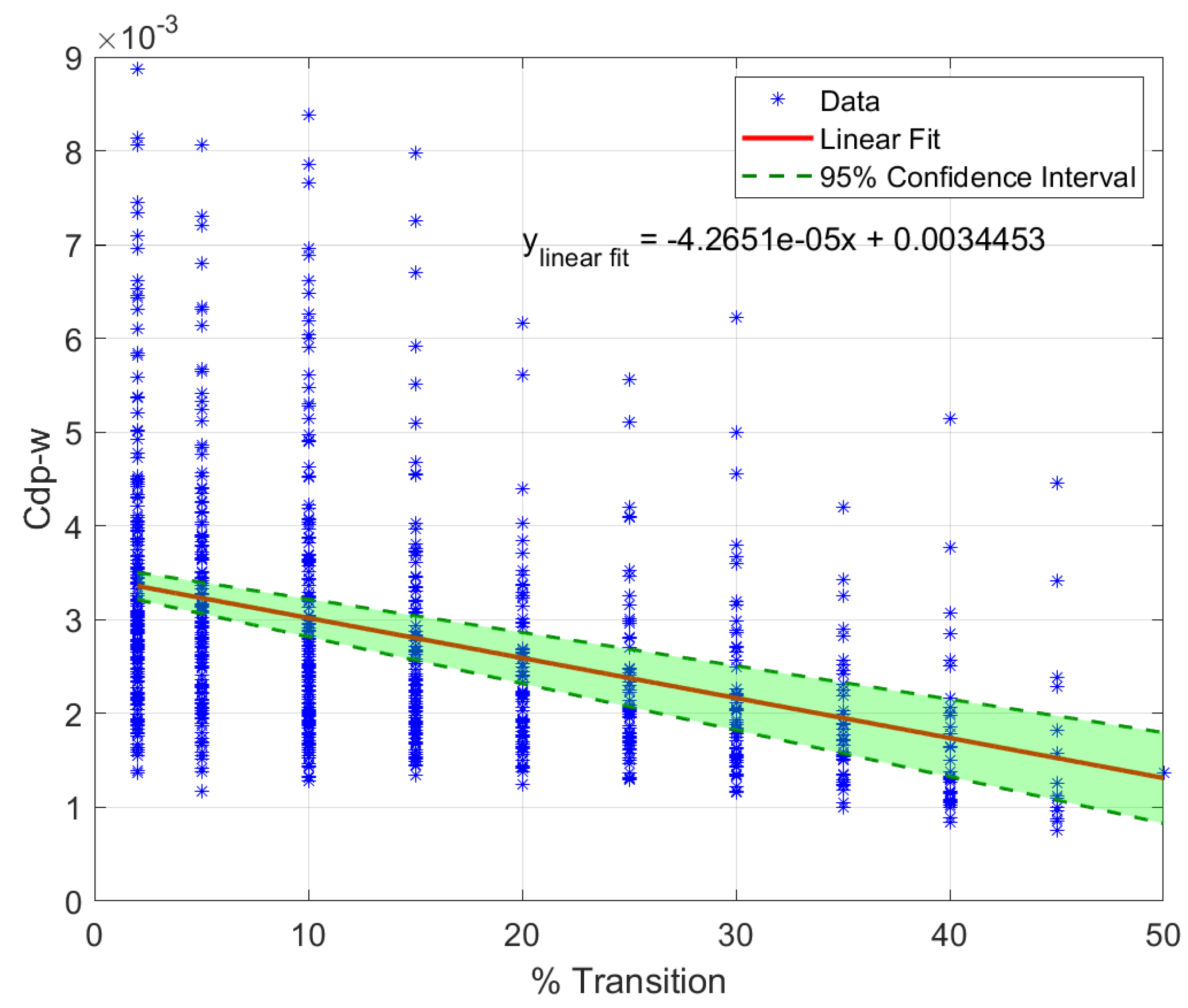
The aircraft is equipped with boundary layer suction (BLS), passive and active load alleviation, as well as novel materials and structures. The laminarisation of the wing is reached by using BLS technology. In particular, the different chord portion of laminar flow is studied, in order to analyze the possible variation of performance related to laminar flow. Empennage also features BLS similar to the wing, whereas the fuselage is laminar until the wing–fuselage junction. Laminarisation of the fuselage is reached via the application of the BLS until the wing–fuselage junction. The laminarisation effect on wing drag reduction is characterised in this paper with a drag penalties model, in particular, by using coefficients to reduce drag computed in full turbulent mode inside a gradient-based aerostructural optimisation framework (see
Section 3.2 and
Section 3). The study presents different values of maximum load factor (from 1.5 to 2.5) to take into account the effect of the load-alleviation technology for the future of aircraft design, allowing scenarios with different load limits to allow wing weight reduction [
22]. Hence, the research is also characterised by lower values from the limit load factor of 2.5 obtained by using CS 25.337 [
20]. The use of lower maximum-load factors as a way to take into account the effect of the technology in reducing weights during the optimisation is justified considering different research studies performed by using these assumptions to model the load-alleviation effect (such as [
22,
23]). Moreover, these values assume that load alleviation can counter gust and manoeuvre loads by a minimum of 20%, while flight safety in case of system failure is assured by using safety factors that are typically used for conventional aircraft [
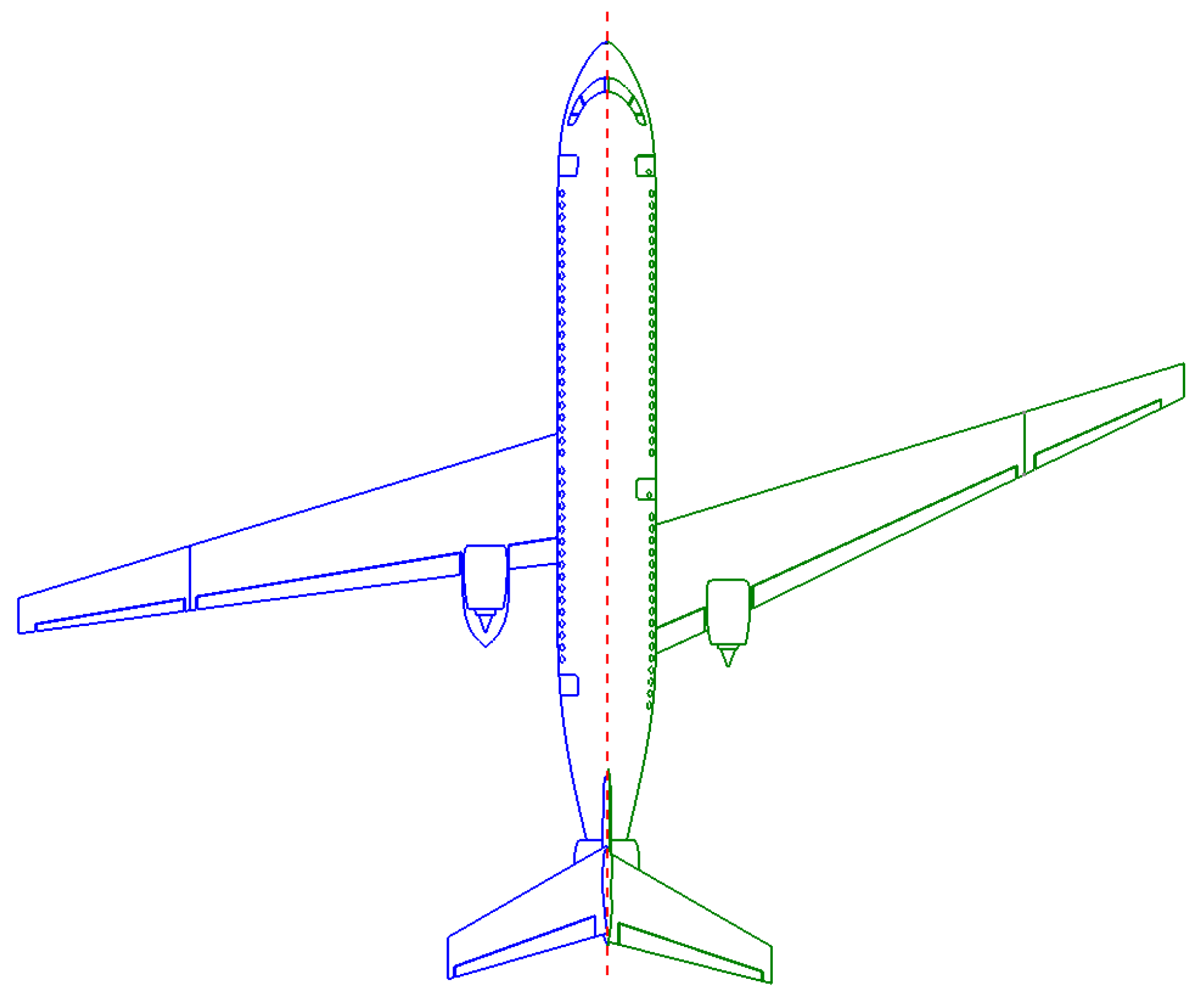
24]. High bypass ratio turbofan engines equipped with boundary-layer ingestion (BLI) were taken into account; in particular, two engines are positioned above the wing for noise shielding, and one engine is located at the fuselage to maximise BLI benefits. Two configurations were considered: the forward- and backward-swept aircraft (
Figure 1). Both wing configurations present an absolute leading edge sweep of 17 degrees. DLR F15 airfoils were selected for the initial design. For initial design phases, wing thickness is distributed similarly to the A320 to avoid issues like insufficient volume to place landing gear. In addition, single-slotted Fowler flaps are chosen; no leading-edge devices are chosen because they could affect laminar flow capabilities. The designed aircraft is then refined with an optimisation process to reduce fuel weight (
). The current research is based on a performance investigation of the two different configurations: the backward- and forward-swept aircraft. The reference geometric data are shown in
Table 2.
4. Multidisciplinary Design Optimisation
As already stated in the paper, a gradient-based optimisation is performed to minimize the fuel weight of the SE
2A midrange aircraft. The multidisciplinary design problem is defined as
The design vector is:
The first four components defined in Equation (
21) represent the thicknesses of the upper and lower equivalent panels, and front and rear spars. These thicknesses are referred to in 10 different sections, going from root to tip, reaching 40 total variables. The
G vector consists of the modes used for the Chebyschev polynomials to parametrize airfoil shapes. Ten modes are used for the upper surface and 10 modes for the lower one, for a total of 160 variables taking into account eight different sections. The wing geometry is defined through the root chord, taper ratio, span, sweep angle at the leading edge, and twist angle at kink and tip. In this research, the midrange aircraft is presented as a trapezoid wing without a kink. Hence, the twist variable is defined at 25% of the span and at the tip. Finally, two surrogate variables are introduced to avoid iterations during aeroelastic analysis: fuel weight and maximum takeoff weight.
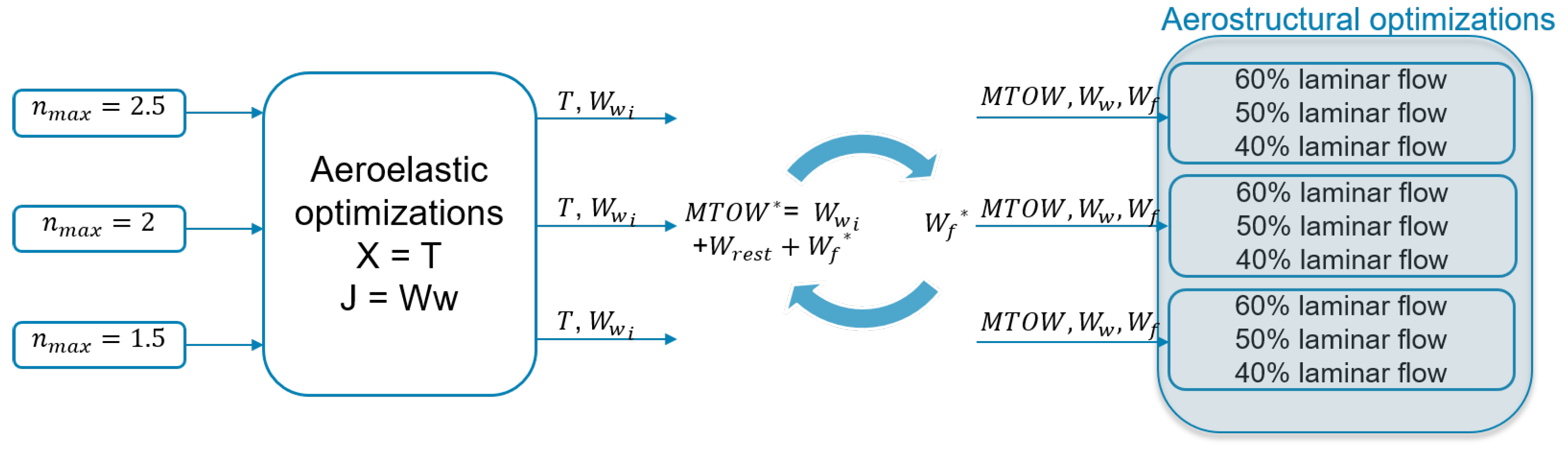
Prior to the full aerostructural optimisations, preliminary aeroelastic optimisations, characterised by panel thicknesses as design variables (first four components of the design vector X), are executed. Different maximum load factors are selected as input. The aeroelastic analyses allow with limited computational time to optimise the wingbox panels minimising . Once the final wing weight is obtained, the MTOW is updated, initially keeping the fuel weight similar to the preliminary one. Finally, and MTOW are iteratively updated until convergence.
Both the aerostructural and aeroelastic optimisations present different constraints. From a structural point of view, constraints on structural failure, related to tensile, compressive, and buckling loads, are applied. For this reason, five different load cases are evaluated (
Table 5): two pull-up maneuver cases at maximum load factor (
), which vary depending on the hypothetical load case scenario considered, a -1g push over maneuver, a 1.3g gust load to simulate the fatigue of the wing lower panel, and a roll maneuver to compute the aileron effectiveness. Finally, the cruise flight condition is also evaluated for the performance estimation. All conditions are determined based on flight envelope and load diagram studied in preliminary aircraft design of the aircraft [
21].
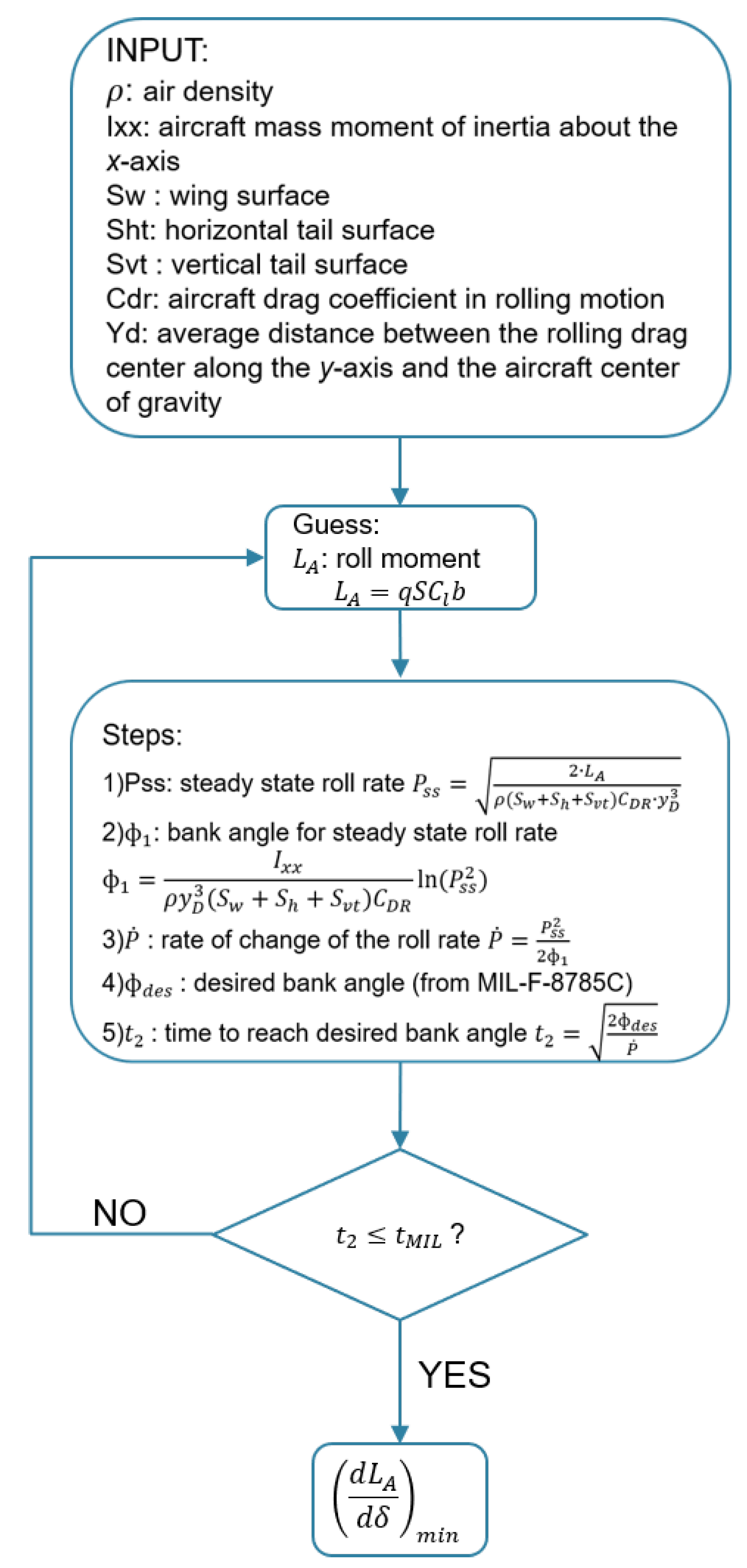
The aileron effectiveness, defined as the ratio of the elastic to the rigid roll moment of the wing due to an aileron deflection, represents a constraint to satisfy the requirements on the roll performance. The roll performance is not only a function of the aircraft roll moment but also of the aircraft moment of inertia. In particular, during the aerostructural optimisation, the planform geometry will change, thus changing the two variables. The minimum of derivative of the roll moment respect to aileron deflection, used as a constraint of the optimisation, is set following the procedure clarified in
Section 3.4.2. Wing loading (MTOW/S or W/S) shall be lower than or equal to its initial value. In this way, the aircraft can satisfy the takeoff and landing requirements. The last constraint is given by the the fuel volume required that needs to be lower than or equal to the available volume. This constraint is expressed in terms of the required fuel computed by the surrogate variable
and the available fuel as
. In total, three different aeroelastic optimisations are performed, so that different maximum load factors can minimise wing weight by varying the thicknesses of the wingbox panels.
These are the inputs of some iterative cycles which set final weight values as new inputs of nine different aerostructural optimisations (three optimisations for each maximum load factor), the objective function of which is represented by fuel weight and all the characteristics shown in Equations (
20) and (
21). The whole optimisation framework is clarified in
Figure 9.
5. Results
Backward- and forward-swept configurations are optimised according to
Section 4. Each configuration presents three aeroelastic optimisations for preliminary sizing, an iterative cycle to update variables, and consequently nine aerostructural optimisations divided into three groups depending on the maximum load factor and the percentage of laminar flow along the wing. A total of six aeroelastic and 18 aerostructural optimisations are performed. Final results of the forward-swept configuration are presented in
Table 6, and the output of the backward-swept is shown in
Table 7. The reference configuration is characterised by the output coming from the aeroelastic optimisations as defined in
Section 4 and shown in
Figure 9. The aeroelastic optimisations are initialised by the low-fidelity design coming from low-fidelity tools implemented for the mission analysis and to satisfy the requirements in
Table 1. In
Table 6, considering the same condition of laminar flow for the forward-swept analysis, the configuration presents higher drag, lower
, and hence higher fuel weight. The other components of the weights are also subject to increments with respect to the optimised versions.
Table 7 shows the results of the backward-swept configuration. In this case, the trend of weight reduction needs further investigation. In fact, although the forward-swept configuration (going from a higher portion of laminar flow to a lower one) induces a progressive augmentation of the weights (MTOW,
), in the backward-swept case this is not always respected. The reason behind the phenomenon is the choice of the optimiser to balance between aerodynamic and structural benefits, so even if structural weights may be incremented for higher % laminar flow, the ratio
plays the main role in minimising
.
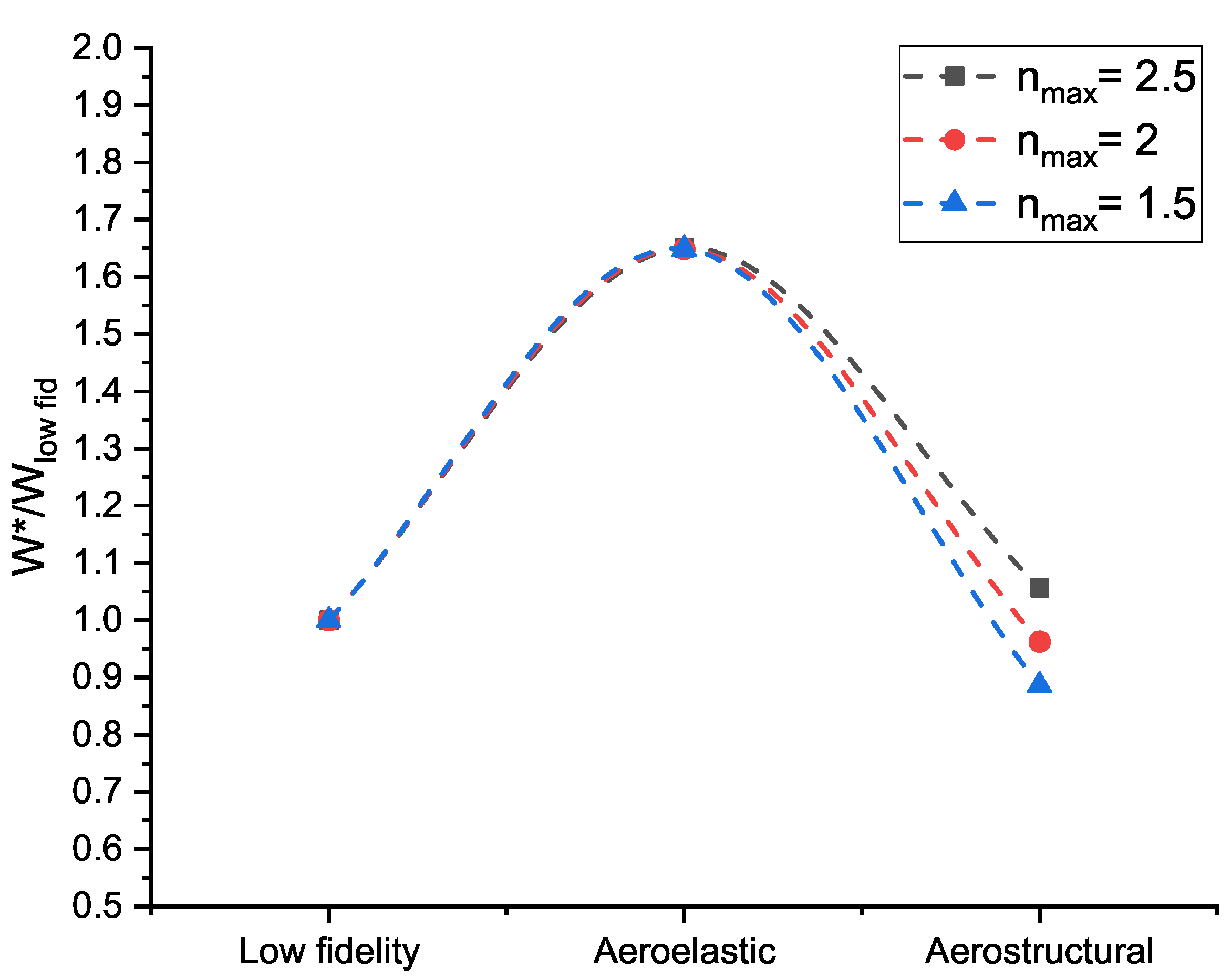
Figure 10 shows an example of how the wing weight changes from the reference data given by low-fidelity studies to aerostructural optimisation. Low-fidelity analysis did not consider aeroelastic effects, aileron reversal, or a deep analysis of wingbox panel thicknesses. Hence, during the aeroelastic optimisation, thicknesses are distributed properly to satisfy material failure and to make the wing statically stable with proper roll capabilities. In particular, the backward-swept configuration is more subject to reduced roll capabilities and aileron reversal compared to aeroelastic divergence. As a consequence, because the preliminary aeroelastic optimisation had constant airfoil shapes and planform characteristics, the weight increment is significant. Once the aerostructural optimisation is performed, depending on the condition, some weight reduction can be achieved with respect to the initial low- fidelity
used as reference for this specific analysis. The wing weight obtained after aeroelastic optimisation has a minor variation with the changing of
, and the effect becomes slightly higher for the aerostructural optimisation. In fact, the main driver, especially for a backward-swept wing aircraft, is given by the aileron effectiveness constraint.
This trend justifies the higher percentage reduction of weights for the optimised configuration of the backward-swept wing (
Table 7) with respect to the forward-swept one (
Table 6). In fact, the backward-swept configuration needs to increment its weight to satisfy the roll requirement and change the panel thicknesses accordingly. A similar trend is described in Ref. [
28], where it is demonstrated that wing structural weight varies quadratically with the aileron effectiveness. In contrast, the forward-swept case does not present any roll issues because of its nature (as discussed in
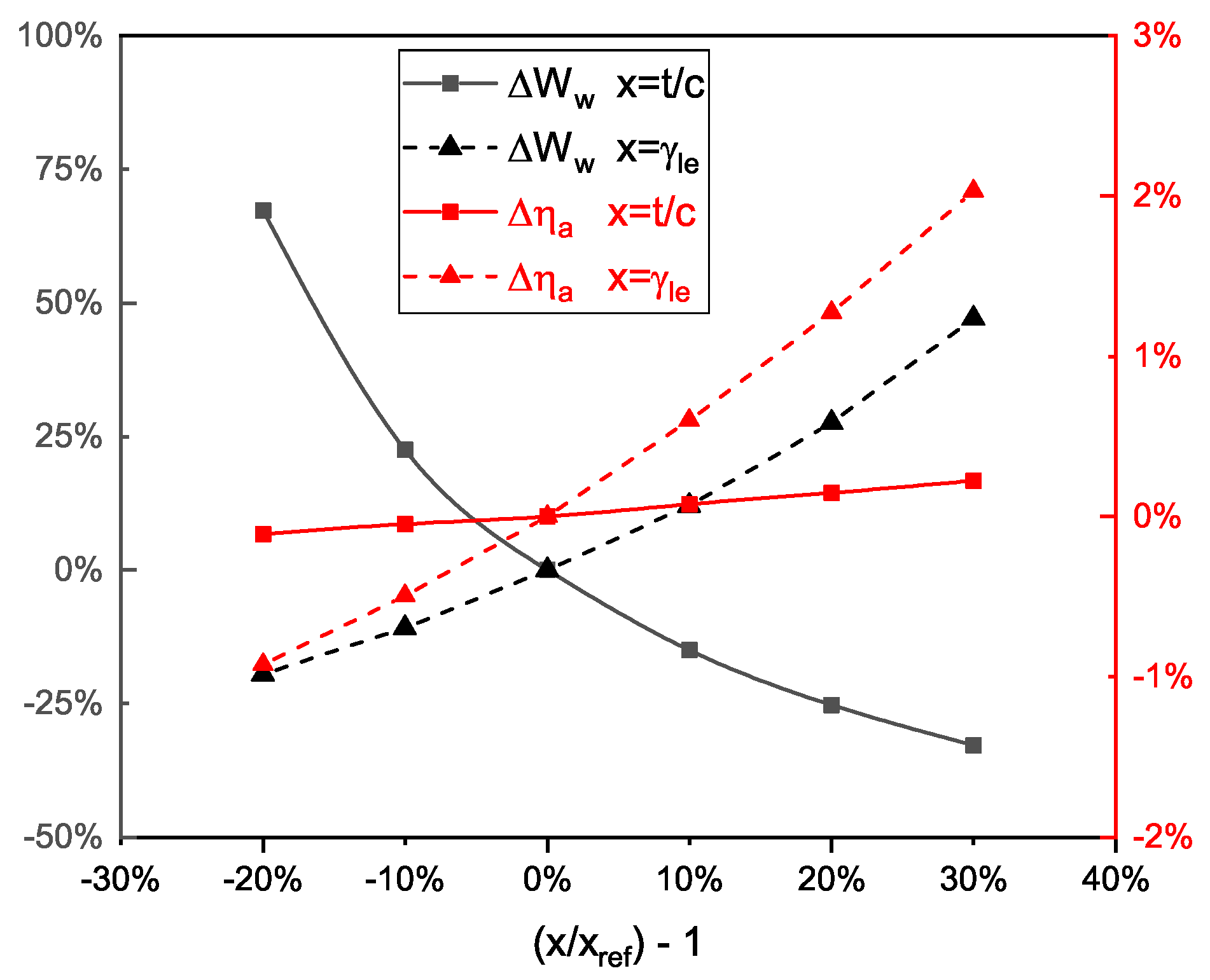
Section 3.4.2), the requirement is easily satisfied without implying particular needs of the final optimised configuration. The little increment of weight is needed for aeroelastic reasons, but the reduced aspect ratio compared to the backward-swept configuration allows it to avoid excessive weight increments and helps the wing stability. Considering the reference backward-swept low-fidelity aircraft, optimised aeroelastically for wing weight reduction via resizing the wing structure box,
Figure 11 shows the influence of the airfoil thickness, scaled from its reference value, on the aileron effectiveness
and wing weight
. If the airfoil is scaled toward higher thickness, a decrement of
is obtained because of the higher stiffness of the larger sections helping in sustaining loads. The aileron effectiveness
is slightly augmented, and the increment is more marked for a higher leading edge sweep angle
. A higher sweep brings higher
due to higher loads.
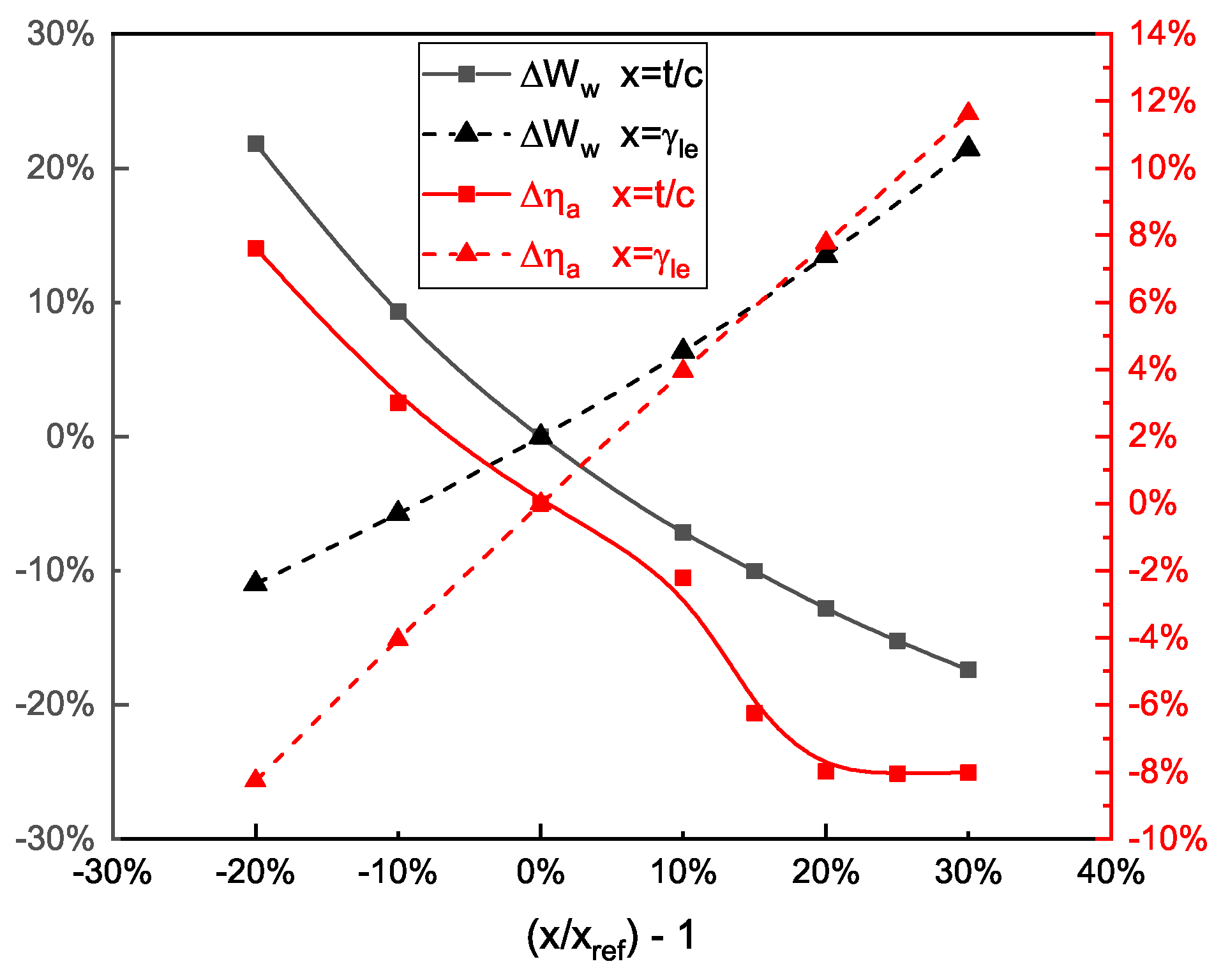
The influence of the above parameters on the forward-swept configuration is studied in
Figure 12.
In particular, a higher
makes the optimised wing lighter, whereas higher sweep increases the
. The aileron effectiveness has benefits on the increment of
, in fact, as seen in
Section 3.4.2, the forward-swept case has more benefits in satisfying roll requirements and the consequential increment of the negative angle increments the benefit. An opposite trend is shown for thickness augmentation; in fact, the bigger section is affecting the aeroelastic deformation negatively via partially reducing the aileron effectiveness. A plateau is spotted for higher
; hence, to confirm this behaviour, two more design points are investigated, at
, and a B-spline curve fitting is used to take into account its variation, while approaching the plateau. It is noticeable that for the forward-swept wing, variations of
are higher in absolute values with respect to the backward-swept case. In fact, the forward-swept configuration has no issues in satisfying the aileron constraint for its geometrical nature, allowing more freedom of the optimiser. Finally, the full aerostructural optimisation allows complete freedom in reaching the final configuration, because of the full set of design variables going from thickness of the wingbox panels to airfoil shape and wing geometry.
The findings studied in
Figure 11 and
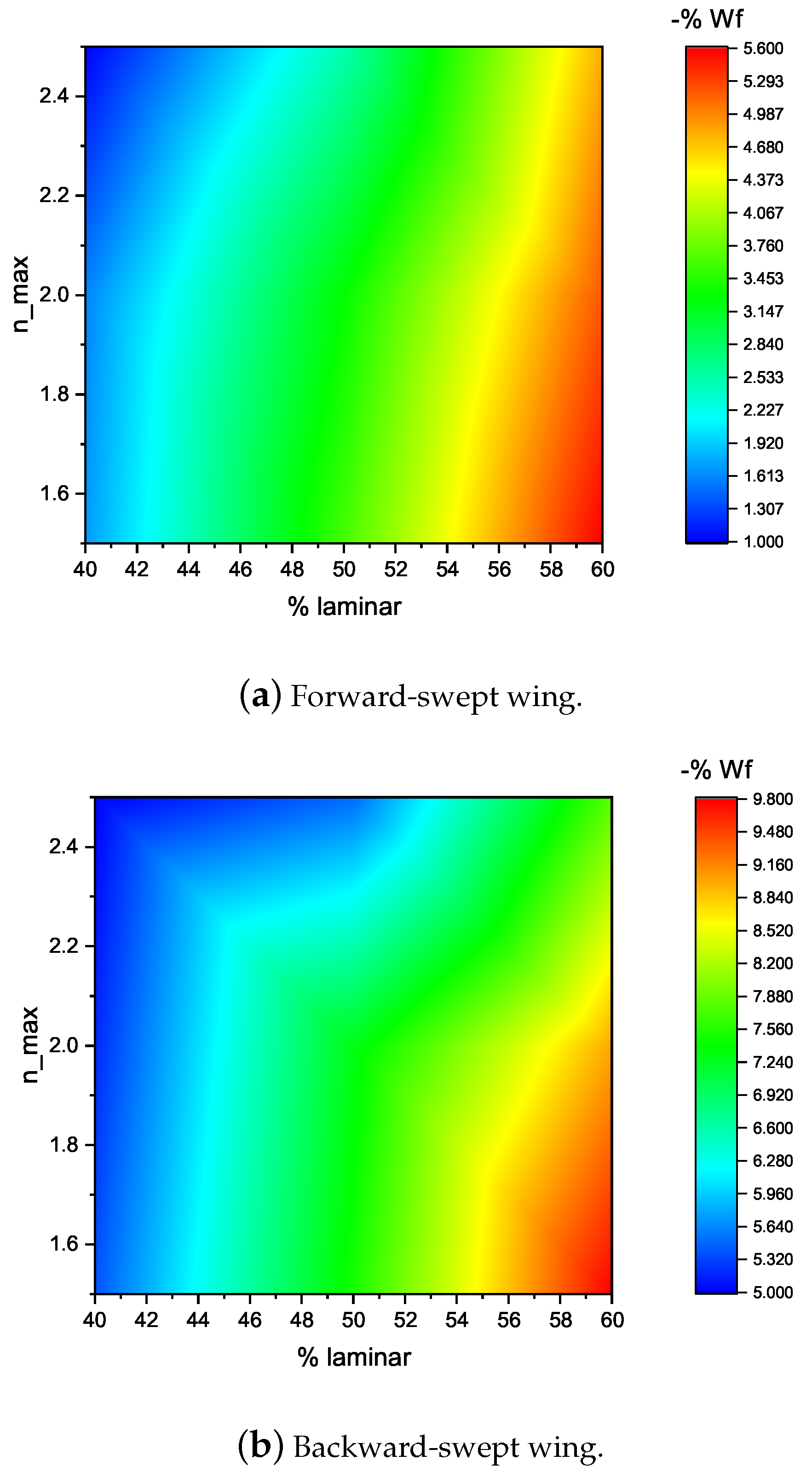
Figure 12 prove the influence of the design parameters on the aileron constraint and structural weight and the importance of a tradeoff to properly assess the optimum. The influence of wing laminarisation in fuel reduction, at different maximum load factors, can be visualised in
Figure 13. In particular, maximum reduction is obtained for the higher use of the technologies, meaning a maximum load factor of 1.5 and 60% laminar flow. In fact, the reduction of
for the forward-swept wing case is 5.6%, and the backward-swept configuration presents a reduction of up to 9.8%.
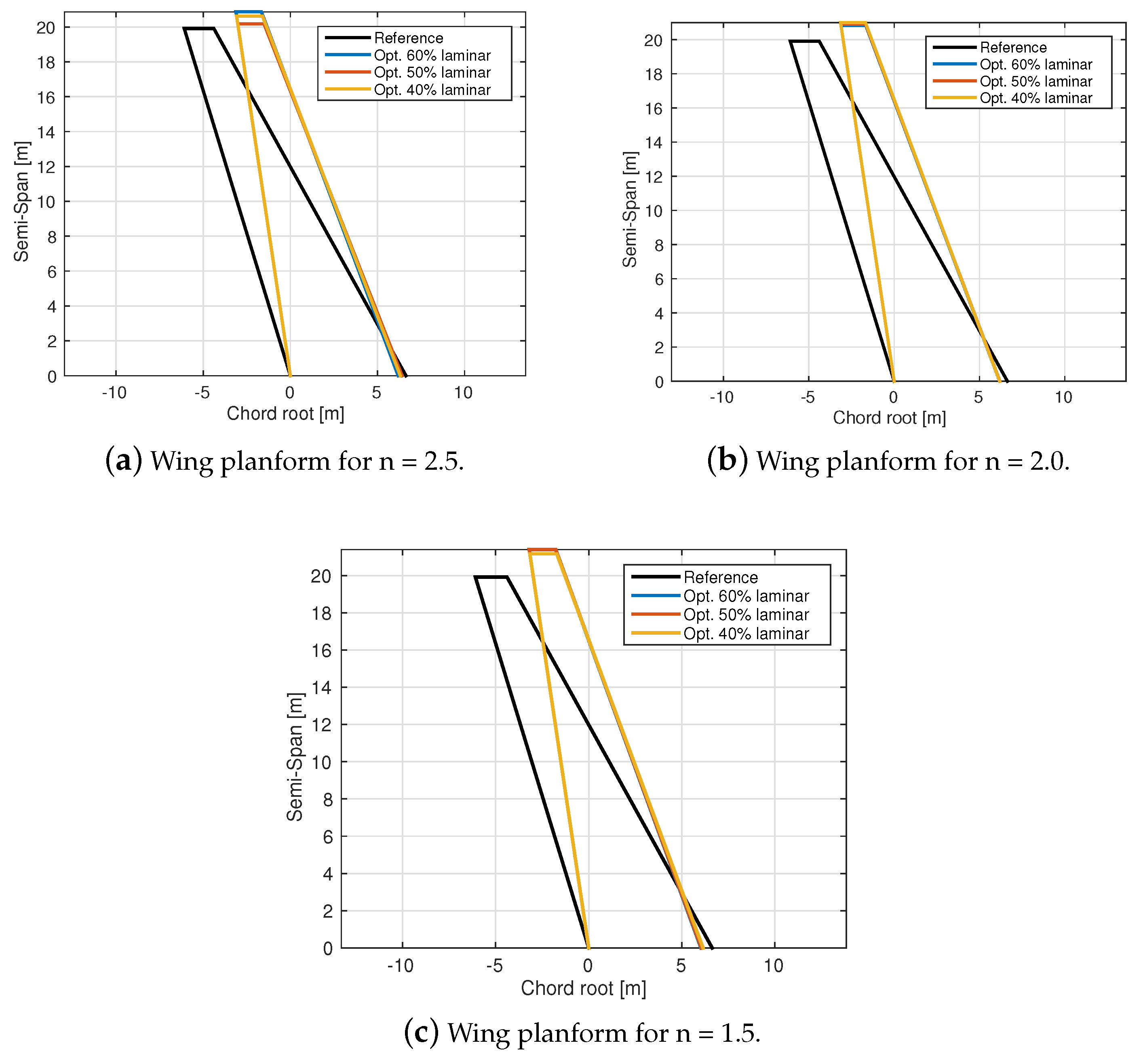
Figure 14 presents the optimised wing planform for a different maximum load factor and portion of laminar flow for the forward-swept wing configuration. All cases present the increment of span and aspect ratio to limit the induced drag generated, and minimal variations are obtained between different laminar conditions.
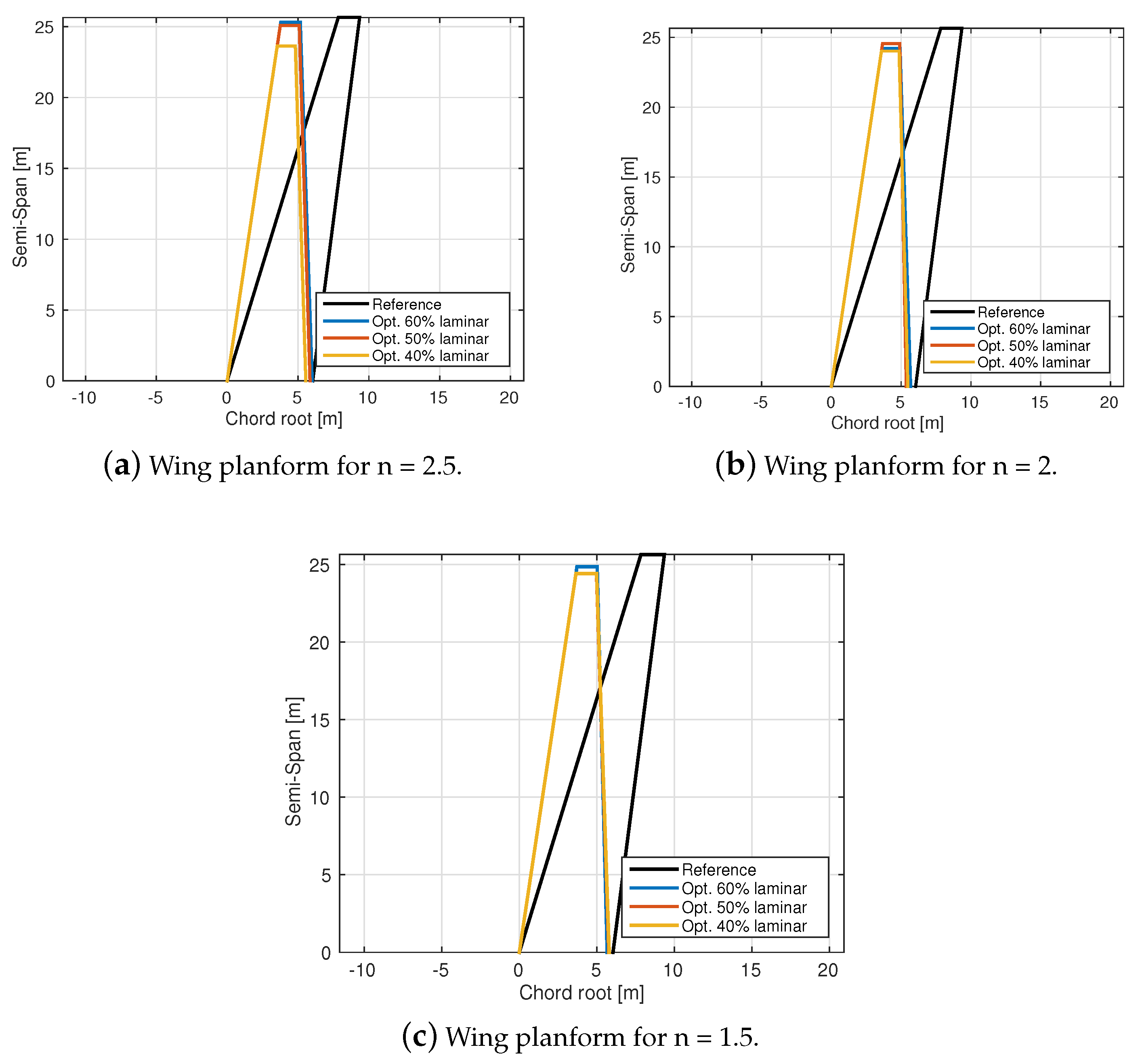
For the backward-swept case shown in
Figure 15, an analogous result is reached for the sweep, with its reduction, while the span is lowered. Nevertheless, the aspect ratio is incremented acting on chord root and taper ratio.
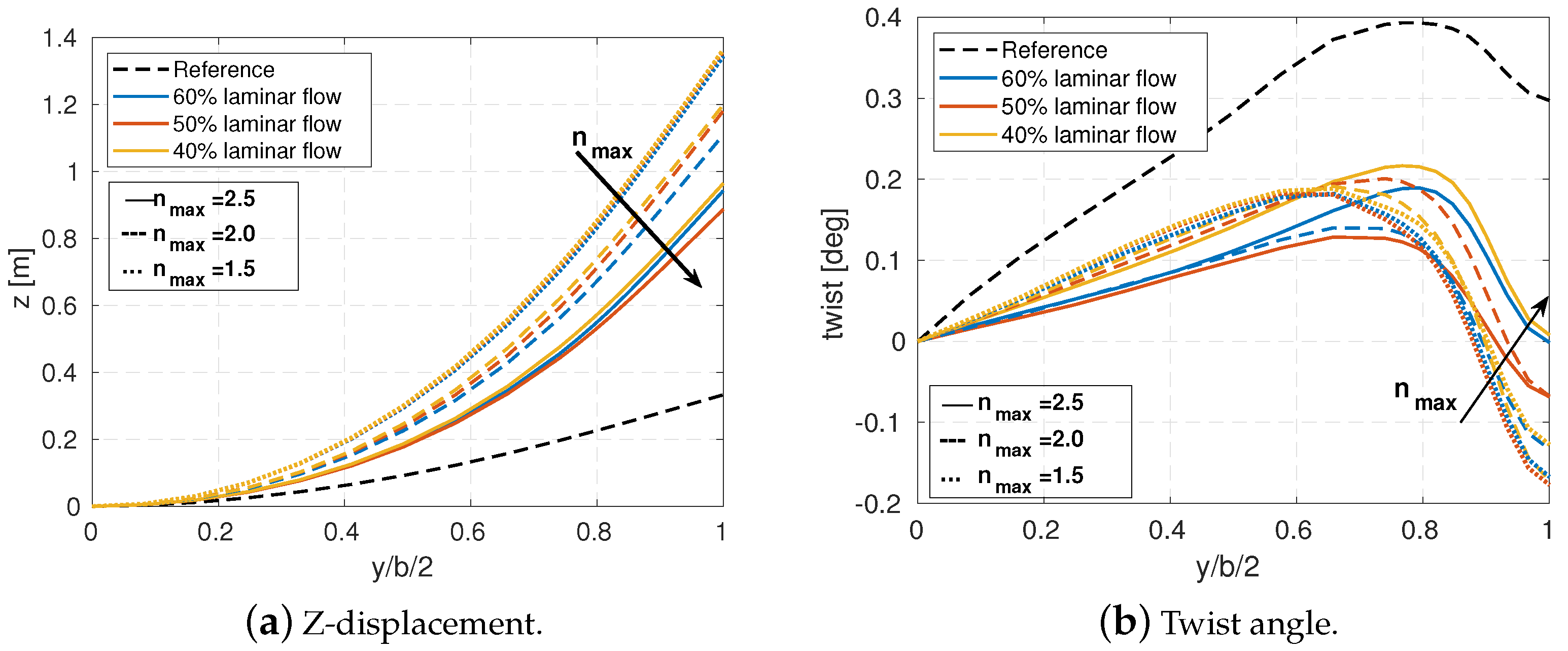
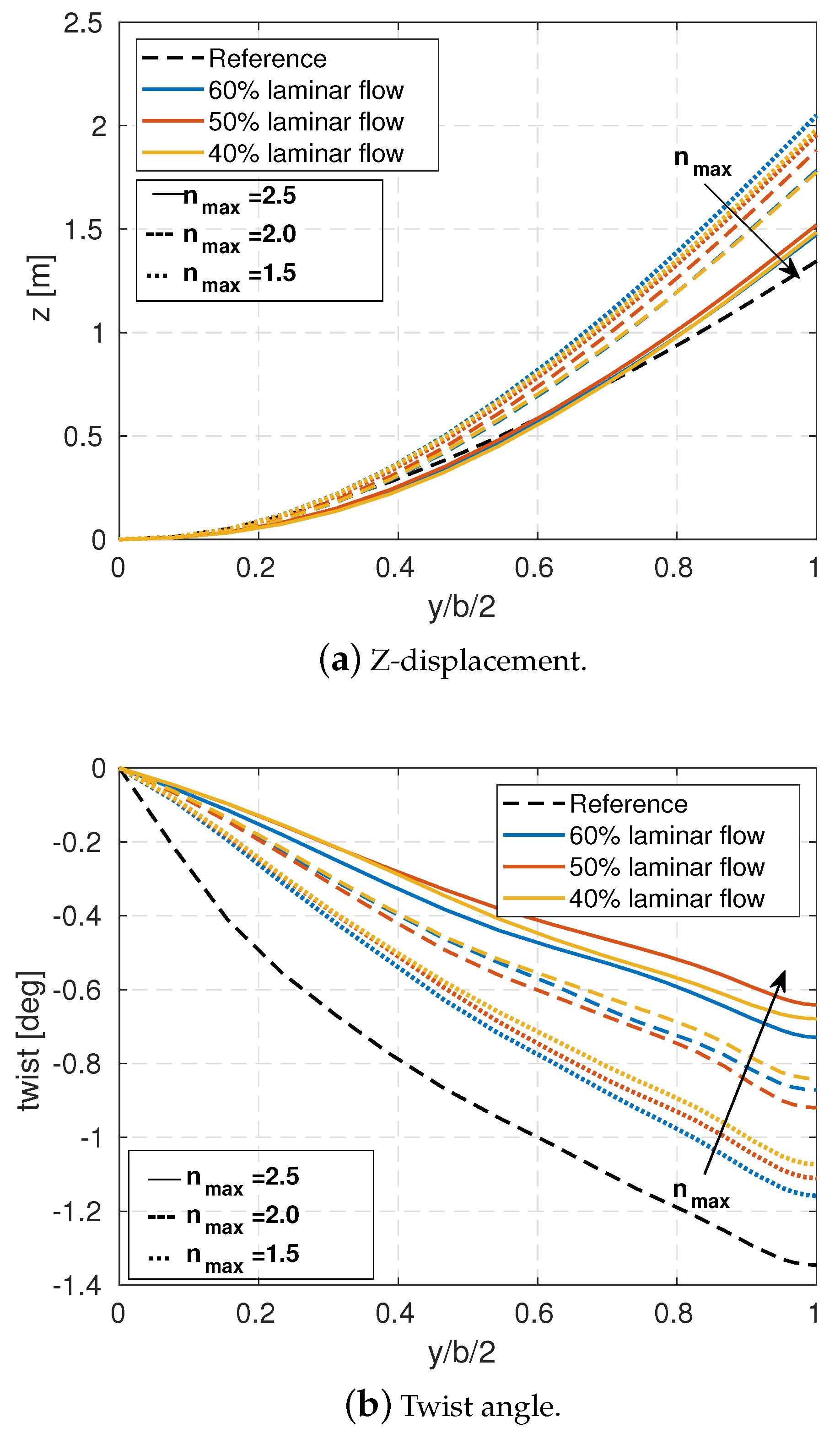
The aeroelastic effect on the wing can be visualised in
Figure 16 for the forward-swept configuration. Compared with the reference wing, designed with low fidelity for a
and then aeroelastically optimised, the aerostructural optimisations result in a more flexible wing. The reduction of maximum load factor causes an increment of the Z-displacement (bending) (
Figure 16a). The wing twist is reduced in
Figure 16b, especially at the wing tip, and the optimiser is reducing the twist considering that for this configuration roll constraint is easily satisfied; hence the wing weight can be accordingly reduced, changing the distribution of thickness of the panels and finally changing the effect on twist.
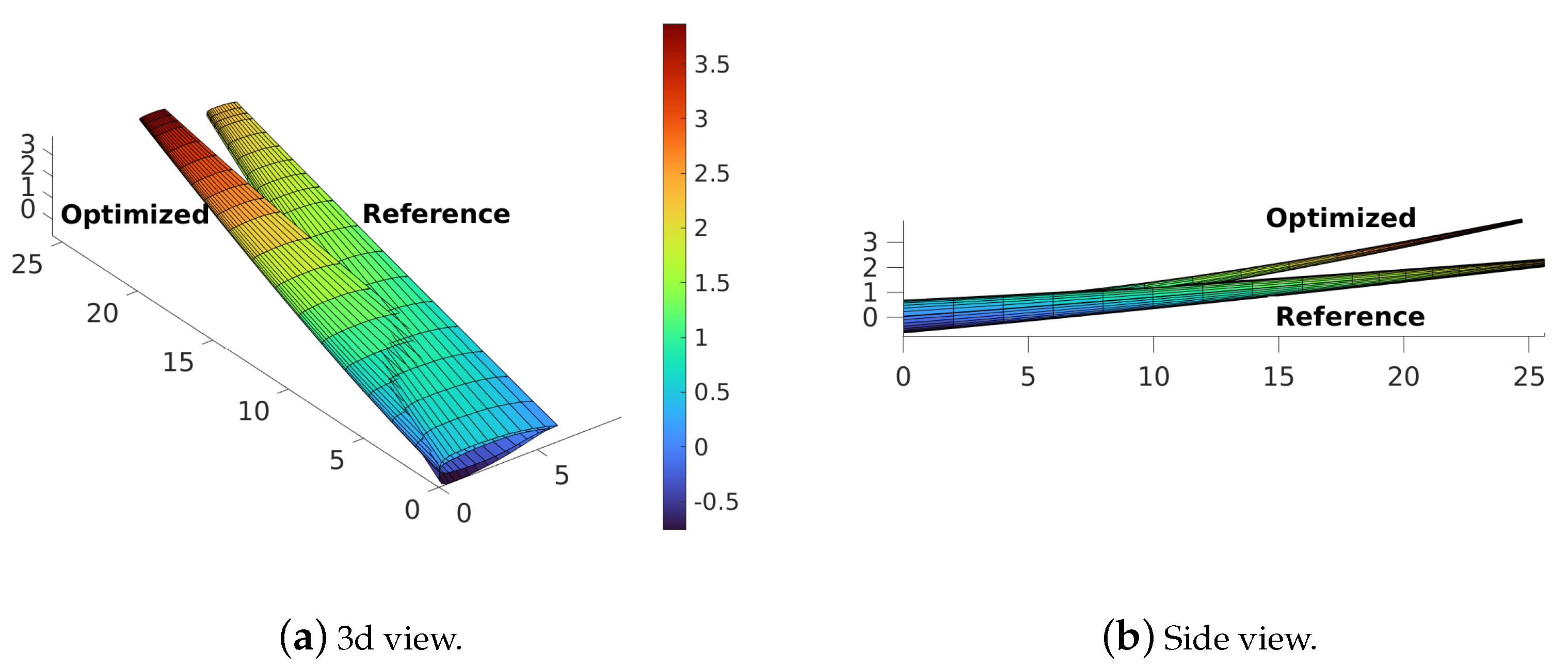
For the backward-swept configuration, a similar aeroelastic effect is achieved, as seen in
Figure 17, for the bending deformation.
Figure 17a shows the increment of tip displacement and wing twist absolute angle (
Figure 17b), consequently presenting higher wing flexibility with the reduction of
. This means that the use of the technology able to reduce the loads sustained by the wing may be beneficial for aeroelastic deformation; in fact, the backward-swept wing aircraft presents less roll capability with respect to the forward configuration, with the consequence of a wing weight increase for the high aspect-ratio wing that is compensated thanks to a lower maximum load factor. The higher flexibility of the wing needs to be assessed in terms of roll moment, and the constraint is still satisfied because the potential increment of wing weight is compensated by the lower maximum load factor and in general by the optimised configuration.
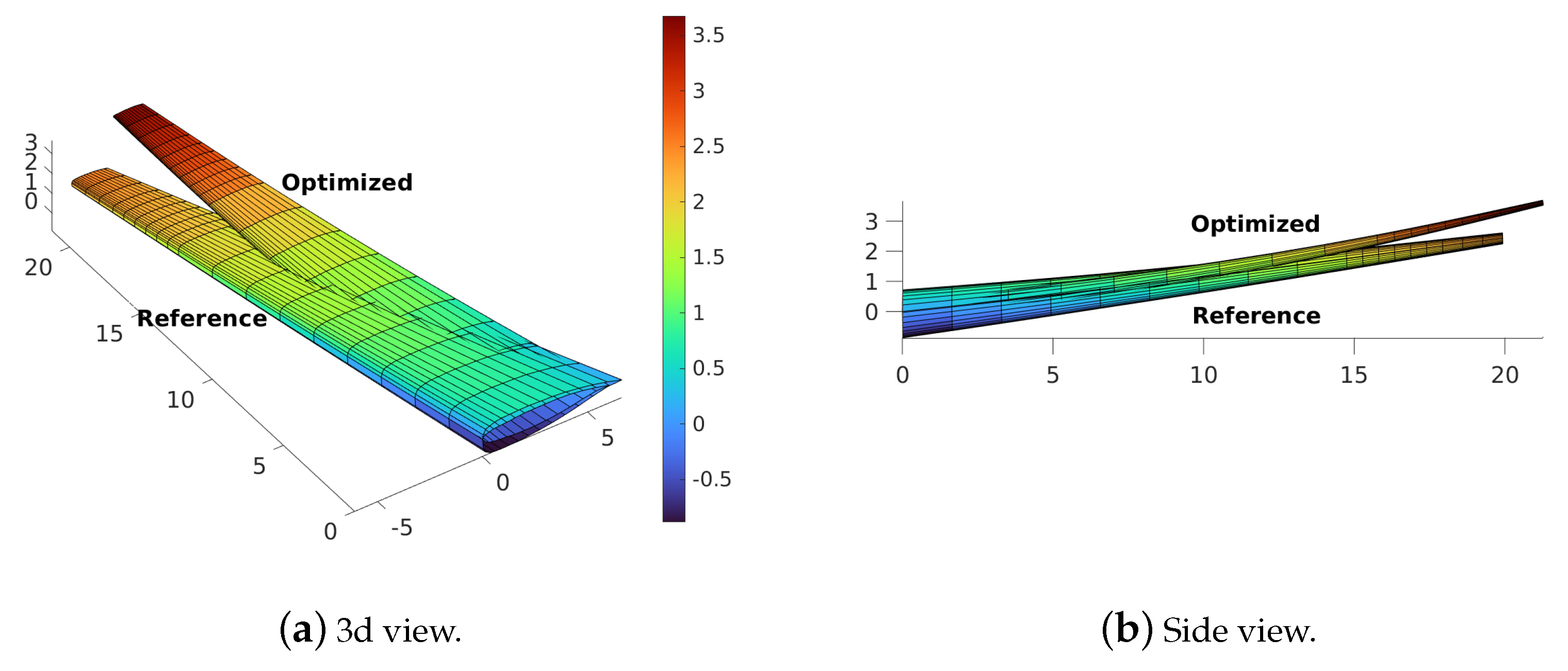
The deformed forward-swept wing configuration, optimised for
=1.5, compared to the reference can be visualised in a 3d and a side view in
Figure 18.
Similarly, the backward-swept case can be visualised in
Figure 19.
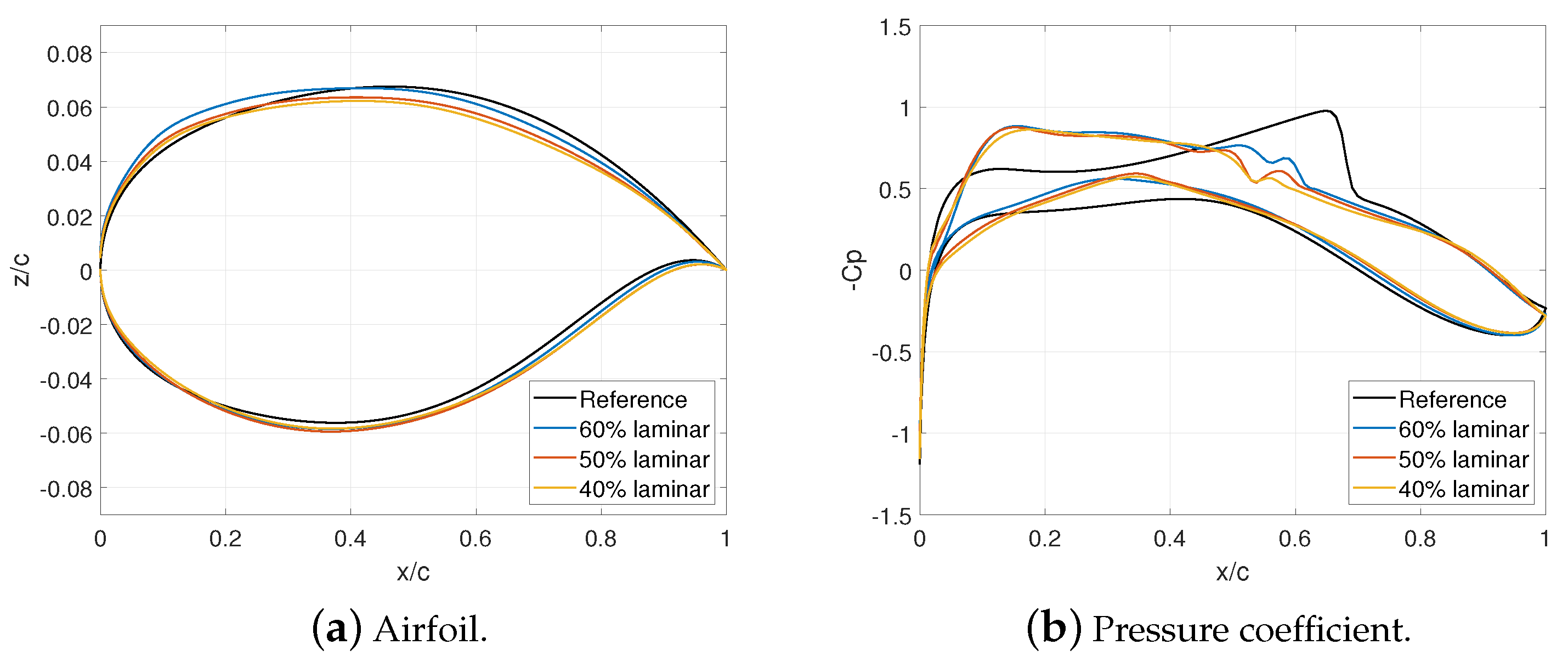
In
Figure 20, an example of a wing section for the backward-swept wing aircraft, optimised for a maximum load factor of 1.5 at different portions of laminar flow, shows the capability of the FEMWET optimisation framework to minimise wave drag, even though it has a lower leading edge sweep angle with respect to the reference, weakening the shockwaves. The new optimised airfoil shapes (
Figure 20a) reduce the impact of shockwaves, weakening them, as shown in the pressure coefficient distribution (
Figure 20b). In fact, the methodology presented in this research is characterised by an interaction between the structures and the aerodynamics, and the interaction needs to be properly assessed in order to reduce
; one way to do this may be the increment of
by lowering the wave drag connected to shocks for transient regime. Considering the aerodynamics limitations explained in
Section 3.2, a parallel study will follow, able to properly optimise the airfoil acting on the boundary layer equations simulating the boundary layer suction.
6. Conclusions
This research presents an aerostructural gradient-based optimisation framework, characterised by the use of a coupled-adjoint method, automatic differentiation (AD), and chain rule of differentiation to compute derivatives necessary for the gradient. The FEMWET tool integrates a quasi-three-dimensional aerodynamic analysis with a structural study.
A midfidelity optimisation framework is developed to take into account active flow control and different load cases. The former is implemented through the application of drag penalty coefficients applied on the full turbulent airfoil, the latter considering different maximum load factors for the pull-up manoeuvre. In addition, the use of novel materials and structures is accounted for by a predicted reduction of the wing weight. In total, three different aeroelastic optimisations are conducted, to minimise wing weight, thereby varying thicknesses of the wingbox panels. Three different maximum load factors are considered during the pull-up maneuver: 2.5, 2.0, and 1.5. These represent a preliminary sizing from which all the weight quantities are updated and are a necessary step to start the complete aerostructural optimisation. A different laminar portion of flow is studied: 60%, 50%, and 40%. Eighteen aerostructural optimisations are performed for fuel weight minimisation, varying wingbox structure, airfoil shape and wing geometry.
The research is applied to the SE2A forward- and backward-swept wing midrange aircraft. The highest benefits are achieved considering the maximum application of wing laminarisation and minimum load factor: 5.6% and 9.8% of fuel weight is reduced for the two configurations. Hence, the application of novel technologies results advantageous for future transport aircraft design for sustainable aviation.
The forward-swept configuration may be sensitive to the aeroelastic stability effect resulting in a weight increment, whereas the backward configuration presents higher weight variation due to roll constraints. In fact, the backward-swept wing configuration presents higher sensitivity to the aileron constraint. This constraint plays a more active role limiting the optimisation results. No dynamic stability effects are studied, leaving them to higher-fidelity analysis.
Sensitivity studies performed for different conditions, obtained through aeroelastic optimisations, show that augmentation of the maximum thickness-to-chord ratio lowers the wing weight for both wing configurations. On the contrary, an increment of the absolute sweep angle makes the wing weight higher. Aileron effectiveness increases with the absolute leading edge sweep angle, whereas the opposite trend occurs with the augmentation of a maximum thickness-to-chord ratio. In fact, for the forward-swept wing, its increment reduces the aileron effectiveness whereas the backward-swept wing is incrementing. Optimised wings present more flexibility, showing higher tip displacement and different behaviour on the wing twist due to the different sweep configuration of the two cases studied.
The present study shows the development and the application of a midfidelity optimisation framework, with novel technologies for nonconventional aircraft and its possible limitations. For these reasons, further research will present a new approach with tools for boundary-layer solvers and linear stability analysis. These will present a higher level of fidelity for laminar flow control analysis but make the framework be gradient-free because of the possible convergence issues. In this case, the higher-fidelity aerodynamic level will be paid with an increment of computational time.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}