
Parameter-Matching Algorithm and Optimization of Integrated Thermal Management System of Aircraft



Abstract
:1. Introduction
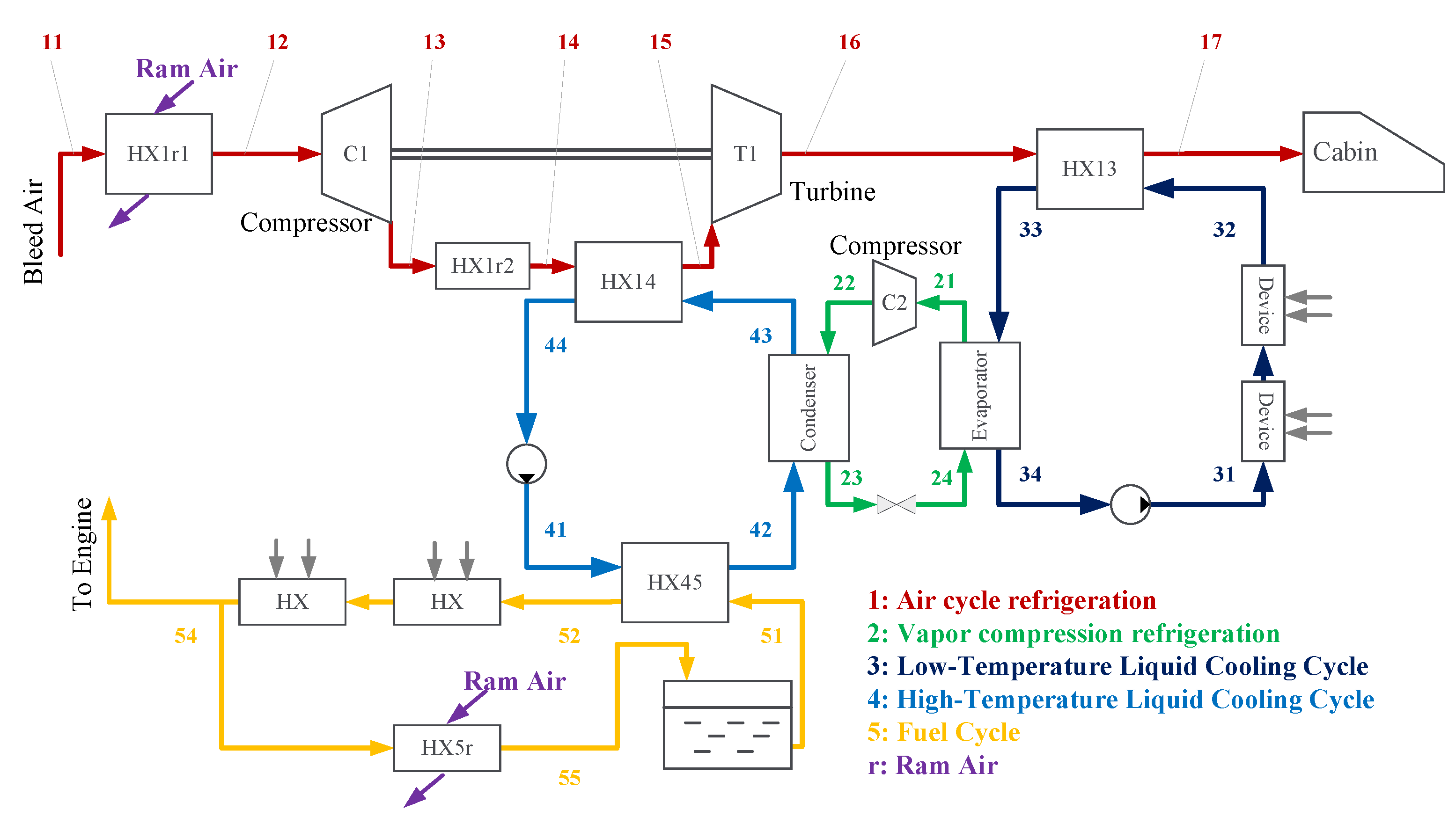
2. Structure of the Integrated Thermal Management System
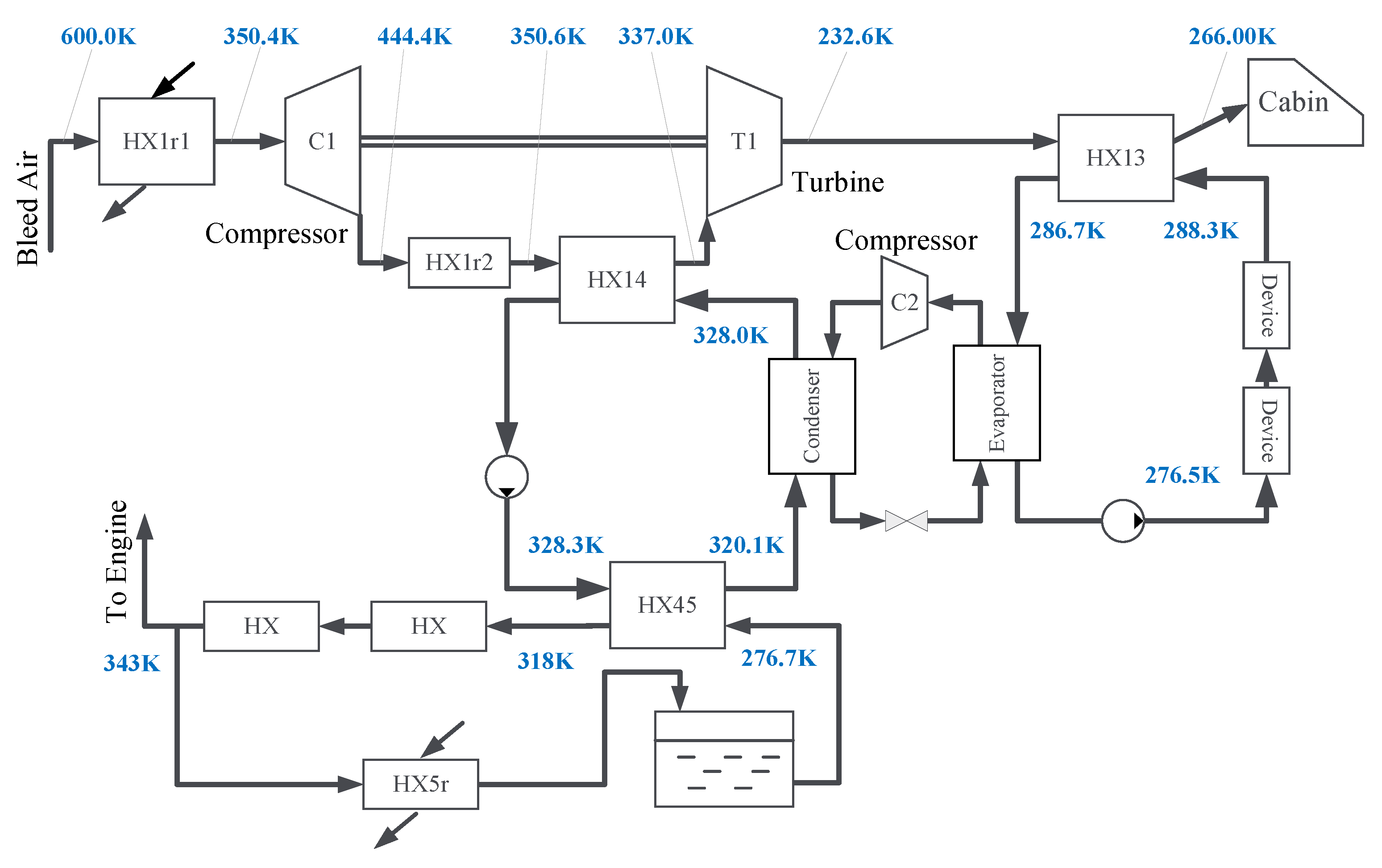
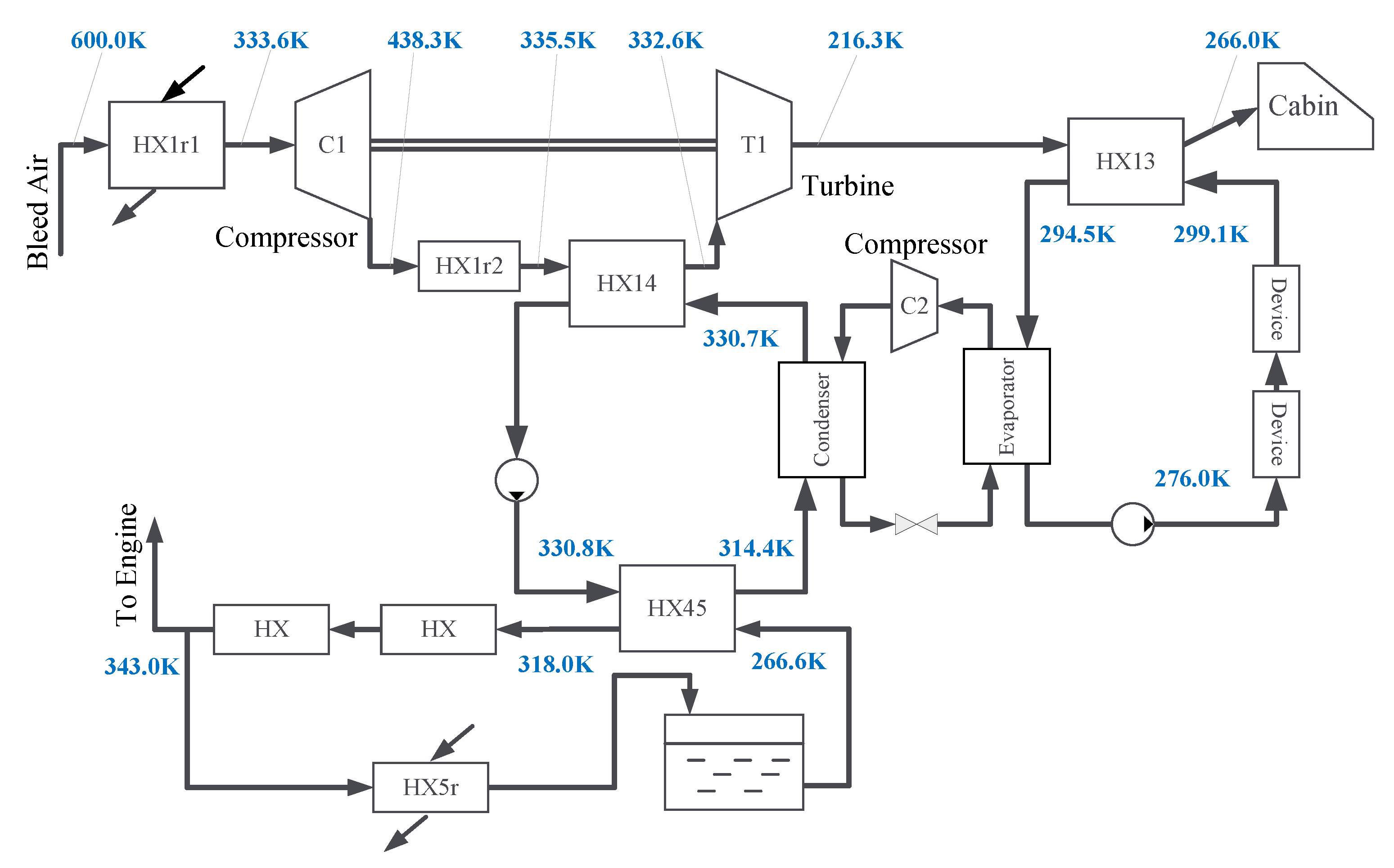
- The air-cycle refrigeration subsystemDue to the relatively small thermal load generated by the cabin, crew and low-power electronic equipment, the ACS can meet the needs of regulating temperature and pressure. The type of ACS is two-wheel bootstrap [19]. The high-temperature air bleeding from the engine compressor enters the subsystem, passes through the primary air heat exchanger and enters the compressor. The air with high temperature and pressure from the compressor enters the secondary heat exchanger and the heat exchanger, which are coupled with the high-temperature liquid-cooling-cycle subsystem, then expands in the turbine. Finally, the air passes through the heat exchanger coupled with the low-temperature liquid-cooling-cycle subsystem and, finally, flows to the cabin at a suitable temperature and pressure.
- The vapor compression refrigeration subsystemThe onboard VCS uses R134a as the refrigerant [20]. The refrigerant R134a evaporates in the evaporator, absorbing the heat of the liquid-cooling working fluid in the low-temperature liquid-cooling cycle. The gaseous R134a from the evaporator enters the compressor. By receiving the work of the compressor, the temperature and pressure of the refrigerant increase. After that, the refrigerant enters the condenser. In the condenser, the R134a with high temperature transfers heat to the working fluid of the high-temperature liquid-cooling-cycle subsystem. Subsequently, the temperature of R134a decreases and cools down into a liquid state. Later, the refrigerant flows through the throttle valve, which can be described as an isenthalpic process with its pressure and temperature decreasing. After that, the refrigerant flows back into the inlet of compressor.
- The low-temperature liquid-cooling-cycle subsystemThe cooling capacity of the equipment can be generated by the VCS, but it also needs a liquid cycle to transfer the heat between equipment and the VCS. Liquid cooling is usually adopted for the cooling of the circuit board of the high-power integrated electronic equipment cabin. In this subsystem, high-power electronic equipment is directly connected to the low-temperature liquid-cooling cycle. Driven by the pump, the low-temperature liquid-cooling cycle absorbs the heat load from the electronic cabin and transfers the heat to the VCS in the evaporator.
- The high-temperature liquid-cooling-cycle subsystemIn the high-temperature liquid-cooling-cycle subsystem, the working fluid is driven by a pump and passes through multiple heat exchangers. The condenser of the VCS, the secondary heat exchanger of the ACS and the liquid-cooled heat exchanger of the fuel cycle are connected in sequence to transfer heat to the fuel-cycle subsystem. The fuel is used as a heat sink to take the heat away.
- The fuel-cycle subsystemIn the integrated thermal management system, the fuel-cycle subsystem mainly involves (1) the heat exchanger between the fuel and the high-temperature liquid-cooling cycle; (2) the heat exchanger between the fuel and the thermal load of the secondary power system (SPS), including lubricating oil cycle and hydraulic oil cycle; and (3) the heat exchanger between fuel and ram air. Among them, the heat exchanger No.2 is simplified to take the thermal load as a design variable.
3. System Parameter Matching
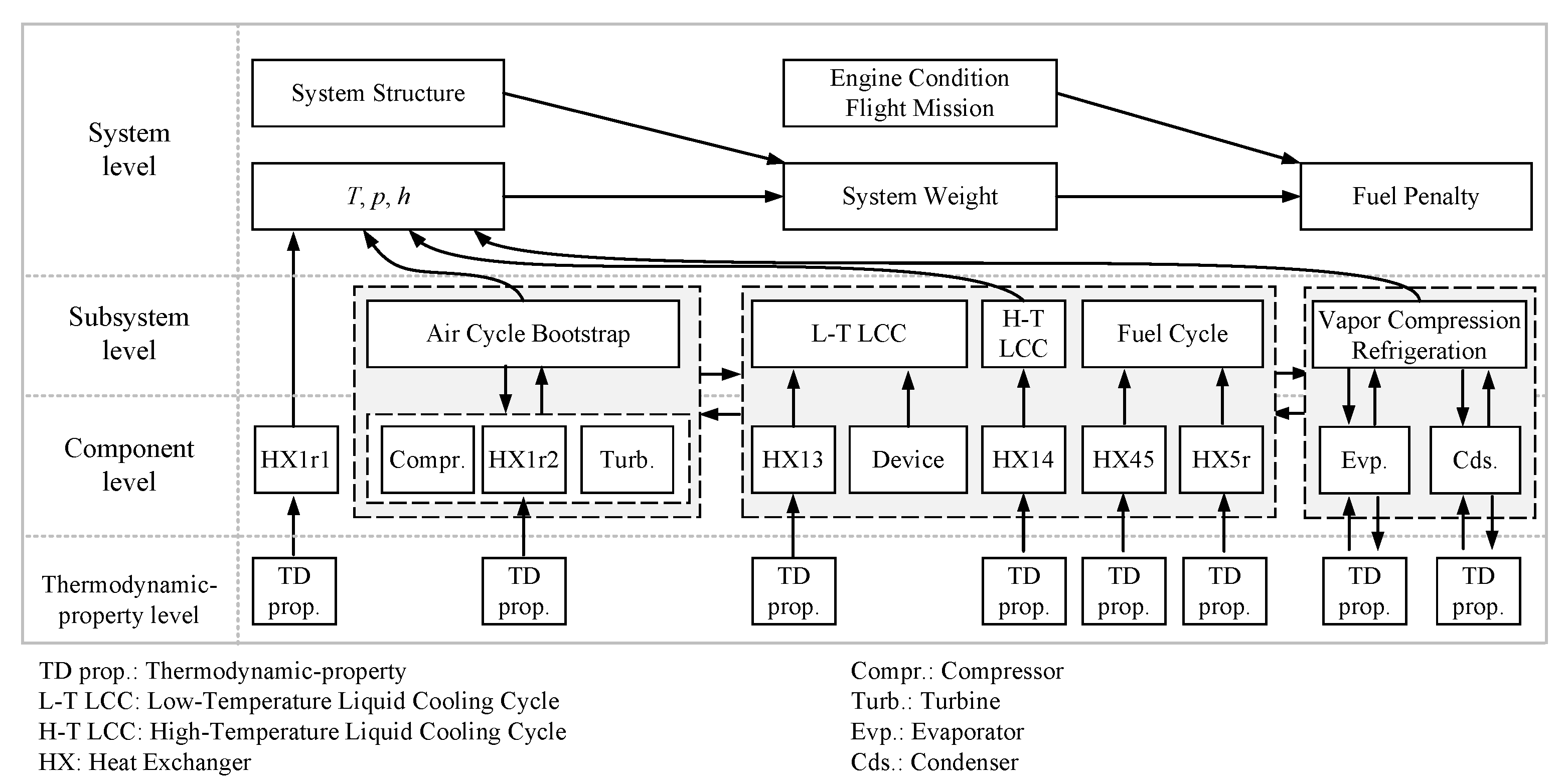
3.1. Hierarchical Parameter-Matching Algorithm
- System levelAt the system level, the total weight of the system can be calculated according to the system structure configuration. Then, the fuel penalty can be calculated from the temperature, pressure, humidity, specific enthalpy and other parameter values of each state point, combined with engine performance parameters and flight conditions.
- Subsystem levelThe integrated thermal management system consists of subsystems such as the ACS, the VCS, the liquid-cooling-cycle subsystem and the fuel-cycle subsystem. As the working fluids of each subsystem are not the same, matching calculations need to be performed according to the characteristics of their respective subsystems. After the component calculation is completed, results are returned to the upper system parameter calculation.For the ACS, the core part is the turbine-compressor bootstrap component. Therefore, the calculation of this subsystem mainly covers turbines, compressors and a series of heat exchangers related to them, including secondary ram-air heat exchanger and the heat exchanger between the ACS and high-temperature liquid-cooling cycle. For the VCS, the calculation of the high-temperature liquid-cooling cycle and the low-temperature liquid-cooling cycle determine the heat exchange of its evaporator and condenser during system parameter-matching calculations. Then, the capacity of performance (COP) of the VCS can be obtained.
- Component levelAt the component level, the parameters of air, coolant and fuel at the inlet and outlet can be calculated through the characteristic equations of each component. After the calculation of each component, the results are returned to the subsystem level. In particular, the calculation of components, such as the primary heat exchanger, does not need iteration related to other components or subsystems. The results can be directly passed to the system level after the calculation.
- Thermodynamic-property levelIn the thermal management system, the parameters of most major components can be directly calculated and obtained without iterative calculations. Iterative calculations are necessary only when the phase-change process is involved and the saturation state needs to be determined. The state points where calculations are required are located in the VCS. At the thermodynamic-property level, only the enthalpy of the fluid is known, while the pressure, temperature and specific entropy are coupled with each other. Therefore, the results of the parameters can be solved by constructing a set of equations among the three parameters.
3.2. Conditions and Assumptions
- Engine performance parameters, including outlet temperature and pressure parameters of the compressor, bleed air conditions, etc.;
- Flight parameters, including flight Mach number, time and altitude, to determine the ambient temperature and pressure;
- Cabin-air-supply parameters, including air-supply flow rate, temperature and pressure;
- Engine-fuel-supply parameters, including fuel-supply flow rate and fuel temperature;
- Thermal load parameters, including heat generation of electronic equipment, heat generation of secondary power systems, etc.
- Ignoring the humidity of air, dry-air properties were used for calculations [21];
- Ignoring the dynamic process of fuel tanks and pipes, only steady-state conditions were considered [21];
- The heat generated by liquid-cooling pumps and fuel pumps were ignored;
- The resistance of the pipeline was considered in neighboring components;
- We assumed that the pressure drop ratio of the heat exchanger was constant [22];
- The thermodynamic properties of the working fluid were considered to be constant [21].
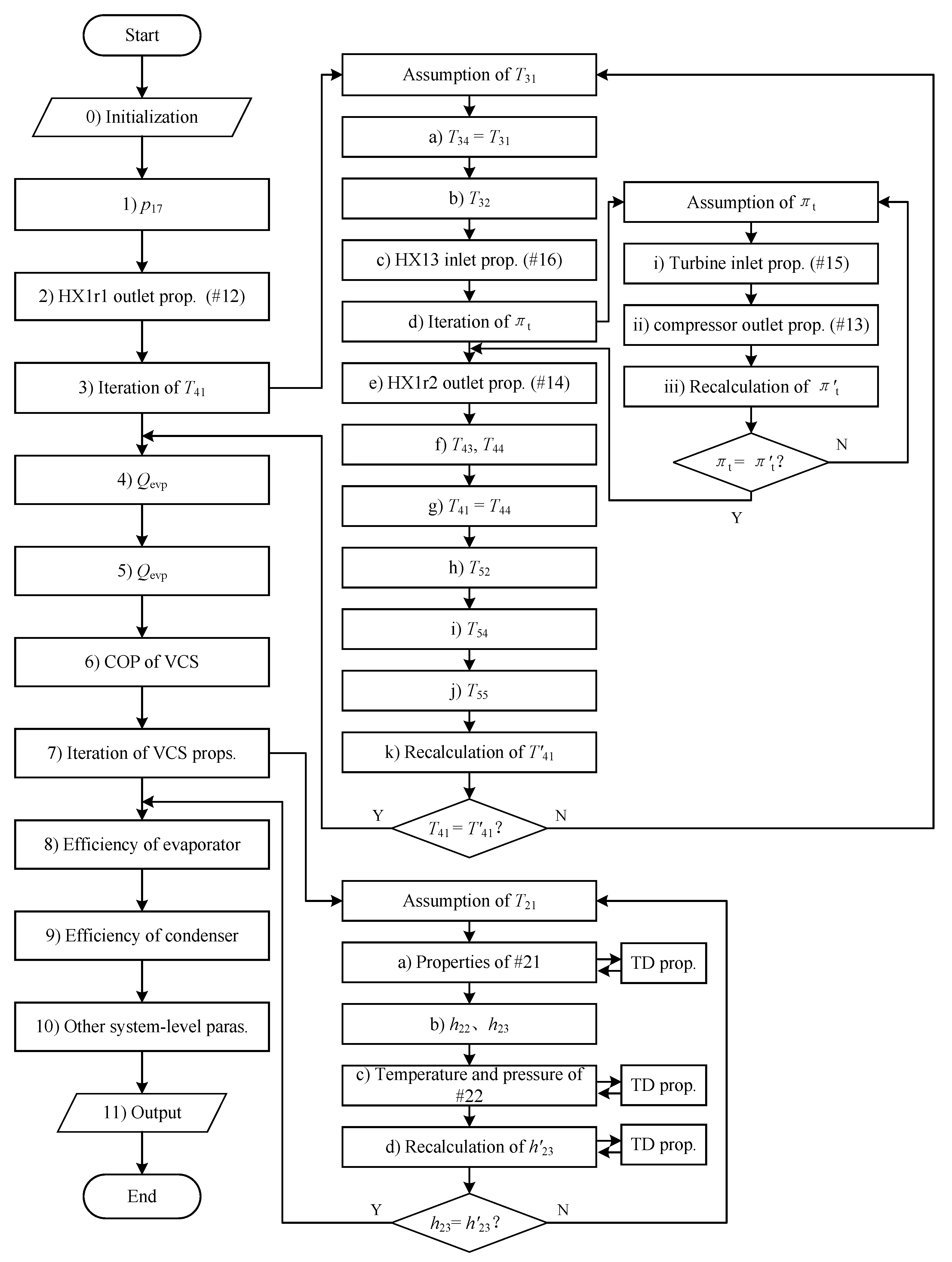
3.3. Parameter-Matching Calculation Process
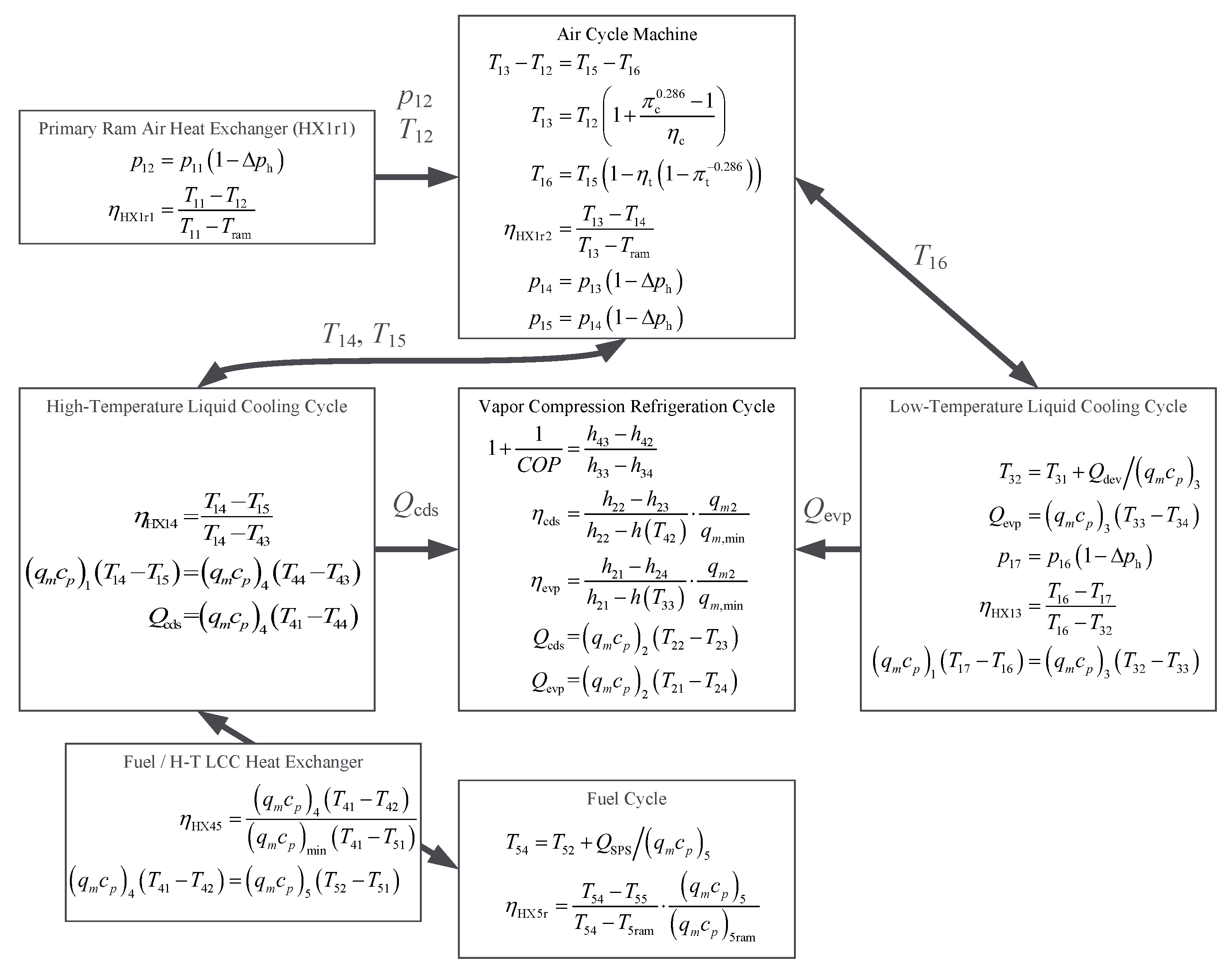
- is calculated according to the pressure of the cabin supply air .
- The outlet temperature and pressure of the heat exchanger HX1r1 ( and ) are calculated according to the temperature and pressure of the bleed air [23].
- The outlet temperature of the pump in the low-temperature liquid-cooling cycle is assumed as .
- (a)
- Ignoring the temperature change of the fluid in the pump, .
- (b)
- The circulating liquid absorbs the heat from the electronic equipment and the temperature rises.
- (c)
- According to the energy balance and the formula of heat-exchanger efficiency, the air-side inlet temperature of the heat exchanger HX13 is calculated.
- (d)
- Assuming the turbine pressure ratio , we perform the following iterative calculation:
- Calculate the compressor outlet temperature , according to the energy balance.
- Compare the result with the assumed turbine pressure ratio; return to recalculate if not matched.
- (e)
- Calculate the air-side outlet temperature of the heat exchanger HX1r2.
- (f)
- Calculate the liquid-side outlet temperature of the heat exchanger HX14 ( and ).
- (g)
- Ignoring the temperature change of the liquid-cooling pump, .
- (h)
- Calculate the fuel temperature before absorbing the heat generated by the secondary energy system.
- (i)
- Calculate the fuel temperature after the ram-air heat exchanger ().
- (j)
- Recalculate the inlet temperature of the coolant side of the heat exchanger HX45 (), according to the conservation of energy.
- (k)
- Compare and ; return to assume again if not matched.
- Calculate the heat exchange of the evaporator.
- Calculate the heat exchange of the condenser.
- Calculate the COP of the VCS.
- Assume the outlet temperature of the evaporator.
- (a)
- Calculate the specific enthalpy , specific entropy and pressure of point 21, according to the thermodynamic properties of the refrigerant.
- (b)
- Calculate and according to the heat exchange of evaporator and condenser.
- (c)
- Calculate and according to the thermodynamic properties of the refrigerant.
- (d)
- Let ; recalculate according to
- (e)
- Compare and ; return and assume again if not matched.
- Calculate the efficiency of the evaporator.
- Calculate the efficiency of the condenser.
- : Efficiency of ACS’s primary HX
- : Efficiency of ACS’s secondary HX
- : Efficiency of air/low-temperature liquid-cooling HX
- : Efficiency of air/high-temperature liquid-cooling HX
- : Efficiency of fuel/high-temperature liquid-cooling HX
- : Efficiency of fuel/ram-air HX
- : Efficiency of ACS’s compressor
- : Efficiency of ACS’s turbine
- : Flow rate of low-temperature liquid-cooling cycle
- : Flow rate of high-temperature liquid-cooling cycle
- : Flow rate of fuel cycle
3.4. Results of Parameter Matching
3.5. Fuel Penalty Calculation
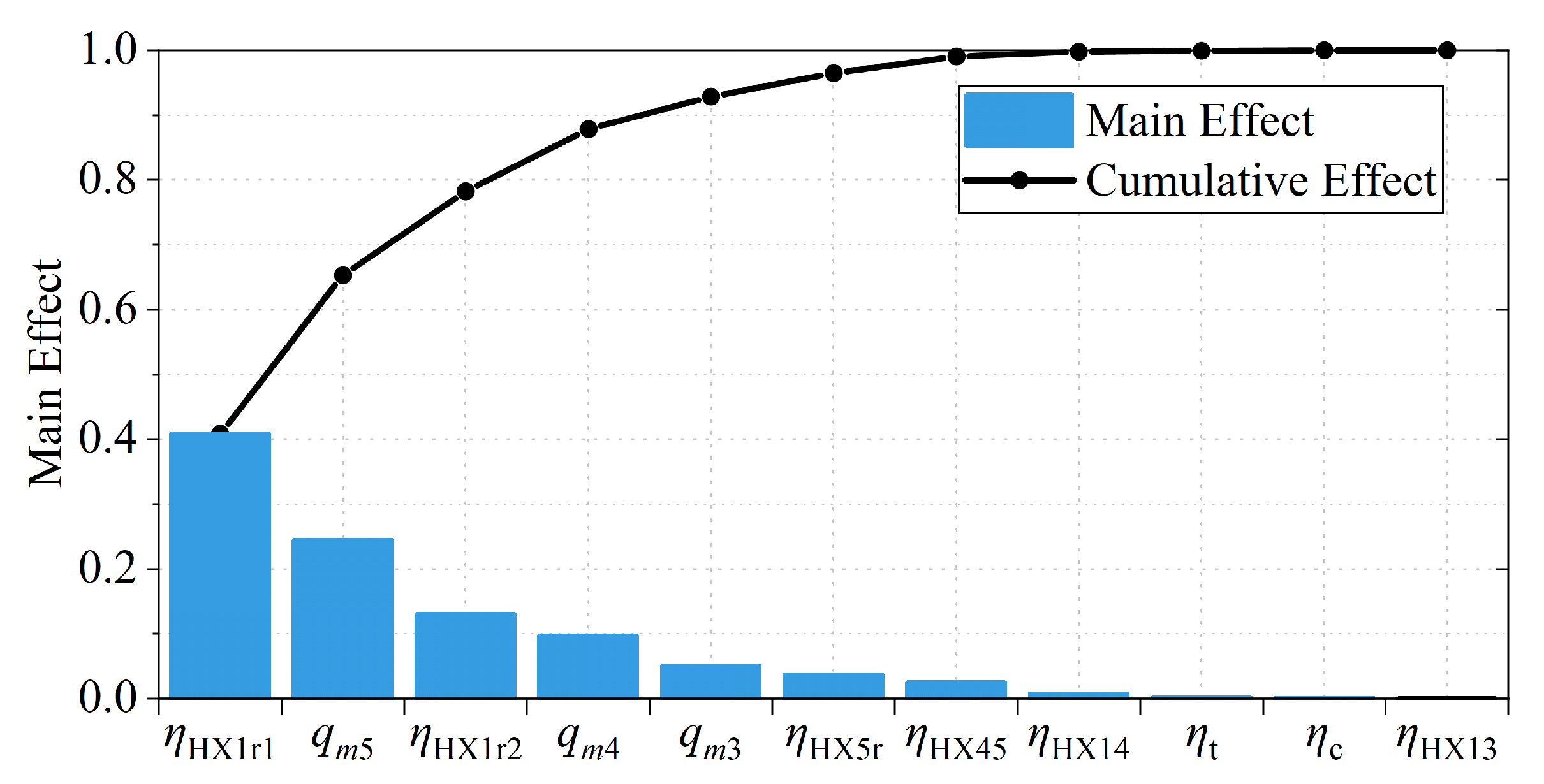
3.6. Sensitivity Analysis of Fuel Penalty
4. Optimal Design Calculation
4.1. Optimization Algorithm
4.1.1. Pattern Search Algorithm
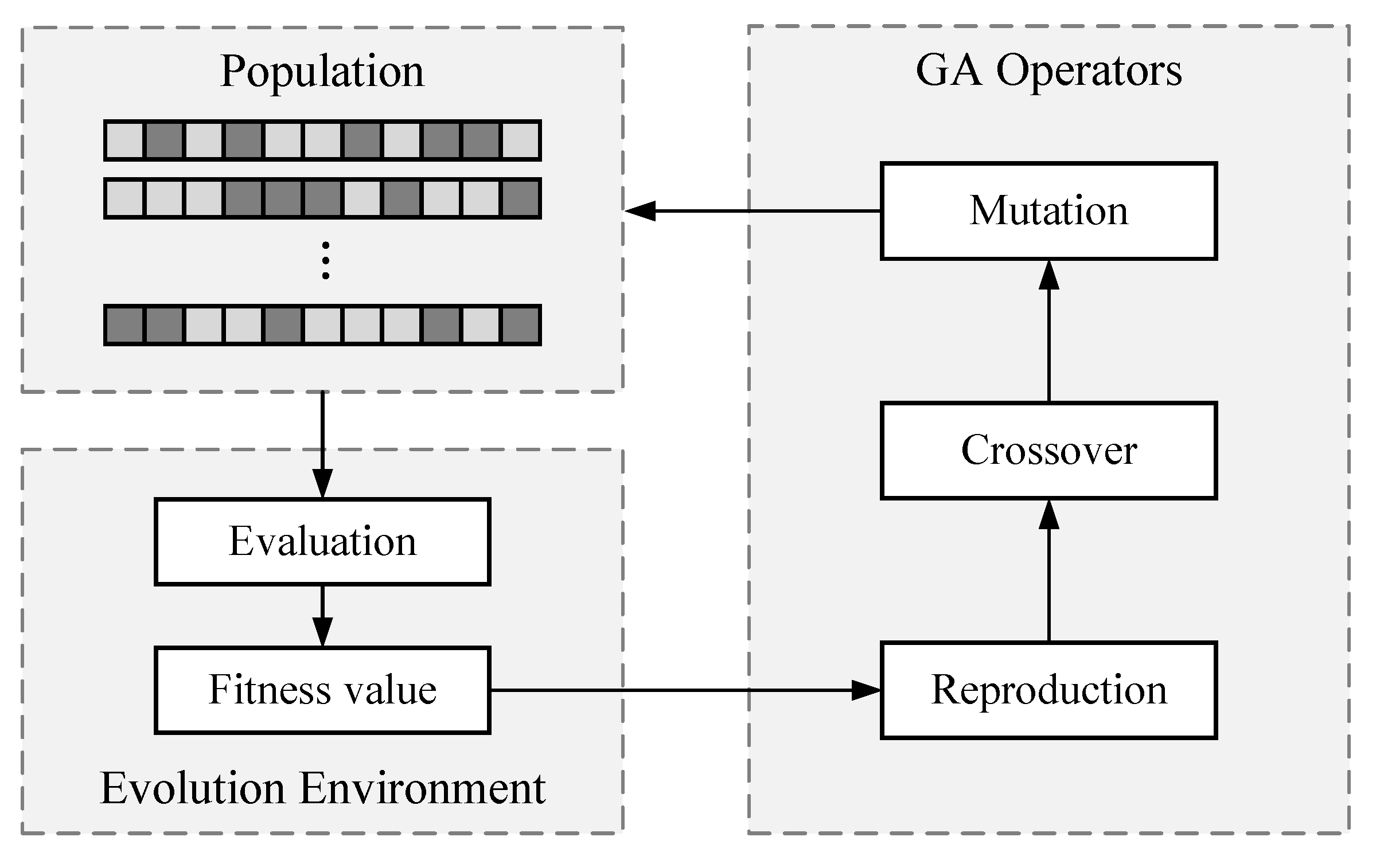
4.1.2. Genetic Algorithm
4.1.3. Particle Swarm Algorithm
- Initialize a group of particles (population size, m), including random positions and velocities;
- Evaluate the fitness of each particle;
- For each particle, compare its adaptation value with that of the best position pbest it has experienced and, if it is better, use it as the current best position pbest;
- For each particle, compare its adaptation value with that of the best position gbest experienced globally and reset the index number of gbest if it is better;
- Vary the velocity and position of the particles according to Equations (27) and (28);
- If the end condition is not reached (usually a sufficiently good adaptation value or reaching a preset maximum algebra ), return to step 2.
4.2. Selection of Optimal Variables
- All 11 design variables were taken as optimized design variables to perform optimization calculations;
- According to the calculation results of the sensitivity analysis, six variables, i.e., (1) efficiency of ACS’s primary HX, (2) flow rate of fuel cycle, (3) efficiency of ACS’s secondary HX, (4) flow rate of high-temperature liquid-cooling cycle, (5) flow rate of low-temperature liquid-cooling cycle and (6) efficiency of fuel/ram-air HX, affected the fuel penalty significantly. Therefore, these variables were set as optimization design variables to perform optimization calculations. The remaining five variables were set as constants.
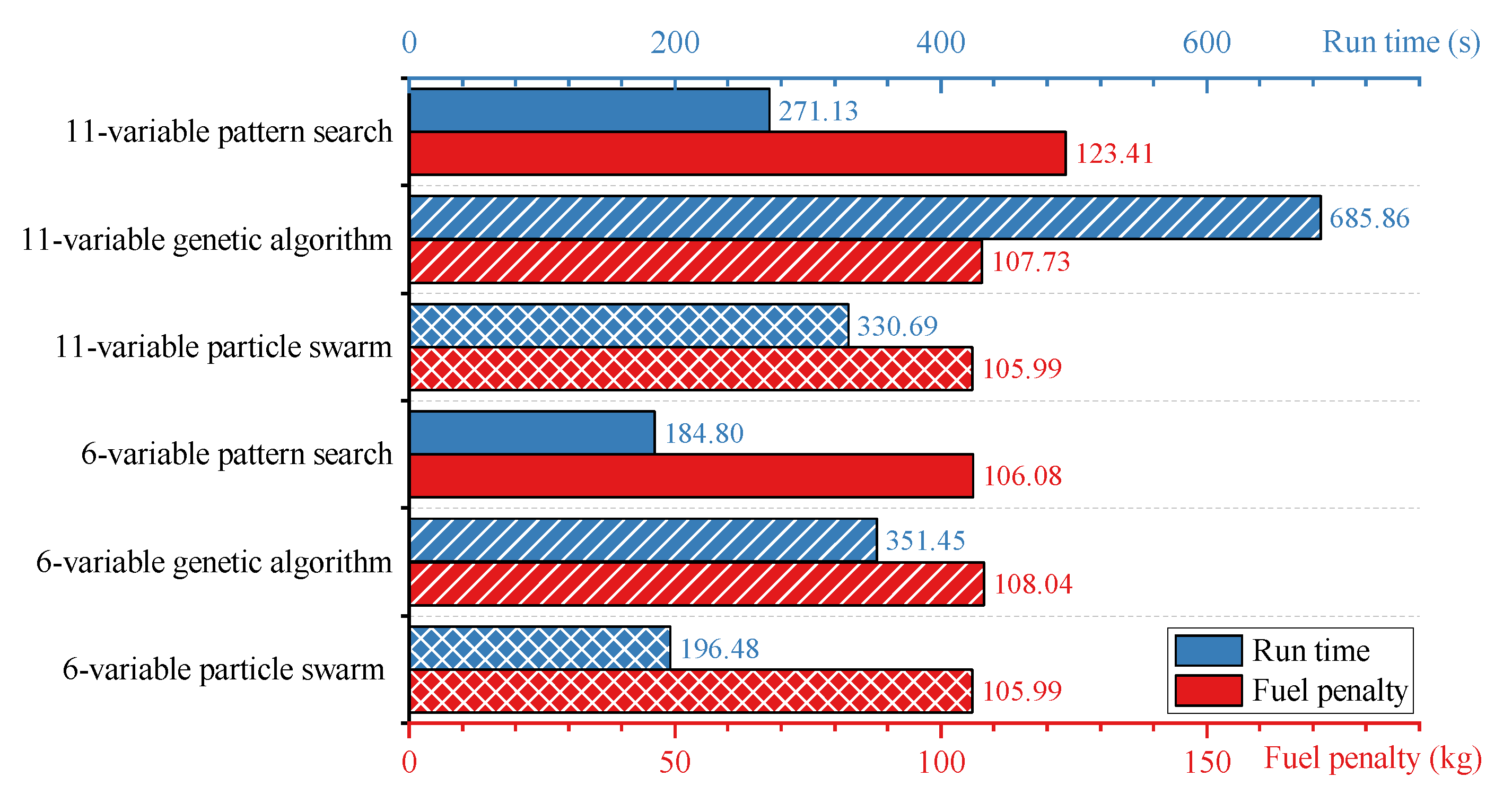
4.3. Optimization Calculation Results
4.4. Discussion
5. Conclusions
- The composition characteristics of the integrated thermal management system were analyzed in depth. Based on the analysis, a four-level parameter-matching calculation method of system, subsystems, components and thermodynamic properties was designed.
- The parameter sensitivity analysis was conducted based on parameter-matching calculations. Through the parameter-matching process and system thermodynamic analysis, 11 design variables were initially selected. The 11 design variables were reduced to 6 variables by the sensitivity analysis. The six variables are (1) efficiency of ACS’s primary HX, (2) flow rate of fuel cycle, (3) efficiency of ACS’s secondary HX, (4) flow rate of high-temperature liquid-cooling cycle, (5) flow rate of low-temperature liquid-cooling cycle and (6) efficiency of fuel/ram-air HX.
- The optimization of the integrated thermal management system is complicated because of the multi-extremum problem. The variables optimized by traditional gradient-based optimization algorithms easily fall into the local extremum point. Therefore, the pattern search, genetic algorithm and particle swarm algorithm were selected for optimization calculation and comparative analyses. The results show that the particle swarm optimization and genetic algorithm could find the global optimal value more easily. Among them, the particle swarm algorithm took the lowest amount of time.
- The algorithm in this paper is mainly aimed at the structural design of the integrated thermal management system of aircrafts. However, it could also be applied to other fields. For thermal systems with similar hierarchical structures, the same idea can be used for parameter matching, sensitivity analyses and optimization design calculations.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ACS | Air-cycle refrigeration (sub)system |
| COP | Coefficient of performance |
| HX | Heat exchanger |
| NTU | Number of transfer units |
| SPS | Secondary power (sub)system |
| TMS | Thermal management system |
| VCS | Vapor-compression refrigeration (sub)system |
Nomenclature
| Thrust-specific fuel consumption | |
| Specific heat capacity | |
| D | Diameter |
| f | Fuel |
| g | Gravity |
| h | Enthalpy |
| Fuel calorific value | |
| K | Lift-to-drag ratio |
| l | Length |
| m | Mass |
| Rotational speed | |
| p | Pressure |
| Pressure drop/pressure difference | |
| P | Power |
| Q | Heat |
| Mass flow rate | |
| Volumetric flow rate | |
| T | Temperature |
| u | Circumferential velocity |
| v | Velocity |
| Velocity ratio of turbine | |
| Coefficient of combustion completeness | |
| Ratio of the heat capacity rate | |
| Efficiency | |
| Pressure ratio | |
| Time of flight | |
| Coefficient of mass of heat exchanger |
Appendix A. Fuel Penalty Calculation
Appendix A.1. Fuel Penalty of System Device Mass
Appendix A.2. Fuel Penalty of Ram Air
Appendix A.3. Fuel Penalty of Engine Power Extraction
Appendix A.4. Fuel Penalty of Engine Bleed Air
References
- Dooley, M.; Lui, N.; Newman, R.; Lui, C. Aircraft Thermal Management-Heat Sink Challenge; Technical Report 2014-01-2193, SAE Technical Paper; SAE: Warrendale, PA, USA, 2014. [Google Scholar]
- Newman, R.W.; Dooley, M.; Lui, C. Efficient propulsion, power, and thermal management integration. In Proceedings of the 49th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, San Jose, CA, USA, 14–17 July 2013; p. 3681. [Google Scholar]
- Nuzum, S.R. Aircraft Thermal Management using Liquefied Natural Gas. Master’s Thesis, Ohio Northern University, Ada, OH, USA, 2014. [Google Scholar]
- Morioka, N.; Saito, H.; Takahashi, N.; Seta, M.; Oyori, H. Thermal Management System Concept with an Autonomous Air-Cooled System; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2014. [Google Scholar]
- Wang, J.; Li, Y.; Liu, X.; Shen, C.; Zhang, H.; Xiong, K. Recent active thermal management technologies for the development of energy-optimized aerospace vehicles in China. Chin. J. Aeronaut. 2020, 34, 1–27. [Google Scholar] [CrossRef]
- Mehta, J.; Charneski, J.; Wells, P. Unmanned aerial systems (UAS) thermal management needs, current status, and future innovations. In Proceedings of the 10th International Energy Conversion Engineering Conference, Atlanta, GA, USA, 30 July–1 August 2012; p. 4051. [Google Scholar]
- Kellermann, H.; Lüdemann, M.; Pohl, M.; Hornung, M. Design and Optimization of Ram Air–Based Thermal Management Systems for Hybrid-Electric Aircraft. Aerospace 2021, 8, 3. [Google Scholar] [CrossRef]
- Rheaume, J.; Lents, C.E. Design and simulation of a commercial hybrid electric aircraft thermal management system. In Proceedings of the 2018 AIAA/IEEE Electric Aircraft Technologies Symposium, Cincinnati, OH, USA, 9–11 July 2018; p. 4994. [Google Scholar]
- Miller, C.; Maser, A.; Garcia, E.; Mavris, D. INVENT surrogate modeling and optimization of transient thermal responses. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012; p. 1123. [Google Scholar]
- Moir, I.; Seabridge, A. Environmental Control Systems. In Aircraft Systems: Mechanical, Electrical, and Avionics Subsystems Integration; John Wiley & Sons: Hoboken, NJ, USA, 2011; Chapter 7; pp. 259–263. [Google Scholar]
- Walters, E.; Amrhein, M.; O’Connell, T.; Iden, S.; Lamm, P.; Yerkes, K.; Wolff, M.; McCarthy, K.; Raczkowski, B.; Wells, J.; et al. INVENT modeling, simulation, analysis and optimization. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010; p. 287. [Google Scholar]
- Donovan, A. Vehicle Level Transient Aircraft Thermal Management Modeling and Simulation. Ph.D. Thesis, Wright State University, Dayton, OH, USA, 2016. [Google Scholar]
- Chen, L.; Zhang, X.; Wang, C.; Yang, C. A novel environmental control system facilitating humidification for commercial aircraft. Build. Environ. 2017, 126, 34–41. [Google Scholar] [CrossRef]
- Freeman, J.; Osterkamp, P.; Green, M.; Gibson, A.; Schiltgen, B. Challenges and opportunities for electric aircraft thermal management. Aircr. Eng. Aerosp. Technol. Int. J. 2014, 86, 519–524. [Google Scholar] [CrossRef]
- Doman, D.B. Optimal cruise altitude for aircraft thermal management. J. Guid. Control Dyn. 2015, 38, 2084–2095. [Google Scholar] [CrossRef]
- Pérez-Grande, I.; Leo, T.J. Optimization of a commercial aircraft environmental control system. Appl. Therm. Eng. 2002, 22, 1885–1904. [Google Scholar] [CrossRef]
- Vargas, J.V.; Bejan, A. Thermodynamic optimization of finned crossflow heat exchangers for aircraft environmental control systems. Int. J. Heat Fluid Flow 2001, 22, 657–665. [Google Scholar] [CrossRef]
- Jiang, H.; Sujun, D.; Zhang, H.; Fengming, A.; Zhang, Z.; Jun, W. Optimization on conventional and electric air-cycle refrigeration systems of aircraft: A short-cut method and analysis. Chin. J. Aeronaut. 2020, 33, 1877–1888. [Google Scholar] [CrossRef]
- Ashford, R.; Brown, S. F-22 Environmental Control System/Thermal Management System (ECS/TMS) Flight Test Program-Downloadable Constants, an Innovative Approach; Technical Report 2000-01-2265, SAE Technical Paper; SAE: Warrendale, PA, USA, 2000. [Google Scholar]
- Ghanekar, M. Vapor Cycle System for the F-22 Raptor; Technical Report 2000-01-2265, SAE Technical Paper; SAE: Warrendale, PA, USA, 2000. [Google Scholar]
- Yang, H.; Yang, C.; Zhang, X.; Xiugan, Y. Influences of Different Architectures on the Thermodynamic Performance and Network Structure of Aircraft Environmental Control System. Entropy 2021, 23, 855. [Google Scholar] [CrossRef] [PubMed]
- Shou, R.; He, H. Aircraft Environmental Control; Beihang University Press: Beijing, China, 2003. [Google Scholar]
- Yu, J.; Gao, H.; Xie, Y. Calculation of Heat Exchanger Heat Transfer and Resistance. In Heat Exchanger Principle and Design; Beihang University Press: Beijing, China, 2019; Chapter 2; pp. 9–37. [Google Scholar]
- Jennions, I.; Ali, F.; Miguez, M.E.; Escobar, I.C. Simulation of an aircraft environmental control system. Appl. Therm. Eng. 2020, 172, 114925. [Google Scholar] [CrossRef]
- Chinneck, J.W. Pattern Search for Unconstrained NLP. In Practical Optimization: A Gentle Introduction; Carleton University: Ottawa, ON, Canada, 2015; Chapter 17; pp. 1–4. [Google Scholar]
- Tang, C.; Mo, H.; Liu, S. The application of the pattern search method for slope stability analysis. J. South China Univ. Technol. (Nat. Sci. Ed.) 2000, 28, 42–46. [Google Scholar]
- Al-Sumait, J.; Al-Othman, A.; Sykulski, J. Application of pattern search method to power system valve-point economic load dispatch. Int. J. Electr. Power Energy Syst. 2007, 29, 720–730. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Yun, W. Research progress of genetic algorithm. Appl. Res. Comput. 2012, 29, 1201–1206. [Google Scholar]
- Pachori, S. Survey Report on Stock Selection and Portfolio Optimization; Technical Report 12BCE055; Institute Of Technology, Nirma University: Ahmedabad, India, 2015. [Google Scholar]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Ground | Cruise |
|---|---|---|
| Supply air temperature of the cabin | 266 K | 266 K |
| Supply air pressure | 101 kPa | 80 kPa |
| Flow rate of cabin supply air | 0.2 kg/s | 0.2 kg/s |
| Heat of electronic device | 50 kW | 50 kW |
| Heat of secondary energy system | 40 kW | 40 kW |
| Supply fuel temperature of engine | 343 K | 343 K |
| Flow rate of supply fuel of engine | 0.3 kg/s | 0.2 kg/s |
| Ram-air total temperature | 288 K | 267 K |
| Flow rate of low-temperature liquid-cooling cycle | 1.25 kg/s | 0.8 kg/s |
| Flow rate of high-temperature liquid-cooling cycle | 2.22 kg/s | 1.67 kg/s |
| Ground State | Cruise State | |||||
|---|---|---|---|---|---|---|
| MATLAB | EES | Difference | MATLAB | EES | Difference | |
| 350.00 | 350.00 | 0.000% | 350.00 | 350.00 | 0.000% | |
| 348.30 | 348.25 | 0.014% | 348.30 | 348.25 | 0.014% | |
| 661.10 | 661.62 | −0.078% | 636.00 | 636.53 | −0.083% | |
| 657.70 | 658.31 | −0.093% | 632.90 | 633.35 | −0.071% | |
| 654.50 | 655.02 | −0.079% | 629.70 | 630.18 | −0.076% | |
| 101.50 | 101.51 | −0.007% | 80.40 | 80.40 | −0.002% | |
| 101.00 | 101.00 | 0.000% | 80.00 | 80.00 | 0.000% | |
| 600.00 | 600.00 | 0.000% | 600.00 | 600.00 | 0.000% | |
| 350.40 | 350.40 | 0.000% | 423.00 | 423.00 | 0.000% | |
| 444.40 | 444.42 | −0.005% | 529.00 | 529.06 | −0.012% | |
| 350.60 | 350.57 | 0.009% | 387.50 | 387.53 | −0.008% | |
| 337.00 | 337.02 | −0.007% | 353.10 | 353.07 | 0.009% | |
| 232.60 | 232.55 | 0.021% | 235.20 | 235.22 | −0.009% | |
| 266.00 | 266.00 | 0.000% | 266.00 | 266.00 | 0.000% | |
| 276.50 | 276.54 | −0.015% | 274.70 | 274.76 | −0.023% | |
| 288.30 | 288.30 | 0.001% | 286.50 | 286.52 | −0.007% | |
| 286.70 | 286.72 | −0.006% | 285.00 | 285.07 | −0.023% | |
| 328.30 | 328.33 | −0.010% | 331.20 | 331.25 | −0.014% | |
| 320.10 | 320.07 | 0.010% | 317.10 | 317.12 | −0.005% | |
| 328.00 | 327.99 | 0.002% | 330.10 | 330.09 | 0.002% | |
| 276.70 | 276.67 | 0.011% | 265.00 | 265.01 | −0.005% | |
| 318.00 | 318.00 | 0.000% | 318.00 | 318.00 | 0.000% | |
| 343.00 | 343.00 | 0.000% | 343.00 | 343.00 | 0.000% | |
| Variables | Name | Min | Max |
|---|---|---|---|
| Efficiency of ACS’s primary HX | 0.45 | 0.9 | |
| Efficiency of ACS’s secondary HX | 0.45 | 0.9 | |
| Efficiency of air/low-temperature liquid-cooling HX | 0.45 | 0.85 | |
| Efficiency of air/high-temperature liquid-cooling HX | 0.45 | 0.85 | |
| Efficiency of fuel/high-temperature liquid-cooling HX | 0.45 | 0.85 | |
| Efficiency of fuel/ram-air HX | 0.45 | 0.85 | |
| Efficiency of ACS’s compressor | 0.6 | 0.8 | |
| Efficiency of ACS’s turbine | 0.6 | 0.8 | |
| Flow rate of low-temperature liquid-cooling cycle | 0.6 | 2.5 | |
| Flow rate of high-temperature liquid-cooling cycle | 0.6 | 2.5 | |
| Flow rate of fuel cycle | 0.6 | 2.5 |
| Variables | 11 Variables | 6 Variables | ||||
|---|---|---|---|---|---|---|
| Search | GA | Particle | Search | GA | Particle | |
| 0.6137 | 0.5329 | 0.5372 | 0.5498 | 0.5370 | 0.5372 | |
| 0.6215 | 0.6089 | 0.6009 | 0.6068 | 0.6057 | 0.6013 | |
| 0.7992 | 0.7240 | 0.7287 | 0.7122 | 0.7286 | 0.7294 | |
| 1.8873 | 0.7252 | 0.7018 | 0.7191 | 0.7023 | 0.6998 | |
| 0.6769 | 0.6001 | 0.6000 | 0.6000 | 0.6000 | 0.6000 | |
| 0.7254 | 0.6203 | 0.6170 | 0.6212 | 0.6173 | 0.6170 | |
| 0.5542 | 0.4974 | 0.4954 | 0.5 (fixed) | 0.5 (fixed) | 0.5 (fixed) | |
| 0.4500 | 0.4504 | 0.4500 | 0.45 (fixed) | 0.45 (fixed) | 0.45 (fixed) | |
| 0.8000 | 0.8000 | 0.8000 | 0.8 (fixed) | 0.8 (fixed) | 0.8 (fixed) | |
| 0.7505 | 0.8000 | 0.8000 | 0.8 (fixed) | 0.8 (fixed) | 0.8 (fixed) | |
| 0.5997 | 0.4505 | 0.4500 | 0.45 (fixed) | 0.45 (fixed) | 0.45 (fixed) | |
| 123.4105 | 107.7315 | 105.9917 | 106.0776 | 108.0401 | 105.9921 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Dong, S.; Jiang, H.; Li, P.; Zhang, H. Parameter-Matching Algorithm and Optimization of Integrated Thermal Management System of Aircraft. Aerospace 2022, 9, 104. https://doi.org/10.3390/aerospace9020104
Wang R, Dong S, Jiang H, Li P, Zhang H. Parameter-Matching Algorithm and Optimization of Integrated Thermal Management System of Aircraft. Aerospace. 2022; 9(2):104. https://doi.org/10.3390/aerospace9020104
Chicago/Turabian StyleWang, Ri, Sujun Dong, Hongsheng Jiang, Peiru Li, and Hainan Zhang. 2022. "Parameter-Matching Algorithm and Optimization of Integrated Thermal Management System of Aircraft" Aerospace 9, no. 2: 104. https://doi.org/10.3390/aerospace9020104
APA StyleWang, R., Dong, S., Jiang, H., Li, P., & Zhang, H. (2022). Parameter-Matching Algorithm and Optimization of Integrated Thermal Management System of Aircraft. Aerospace, 9(2), 104. https://doi.org/10.3390/aerospace9020104