
Reliability-Oriented Configuration Optimization of More Electrical Control Systems

Abstract
:1. Introduction
2. Mathematical Modeling of More Electric Control System (MECS)
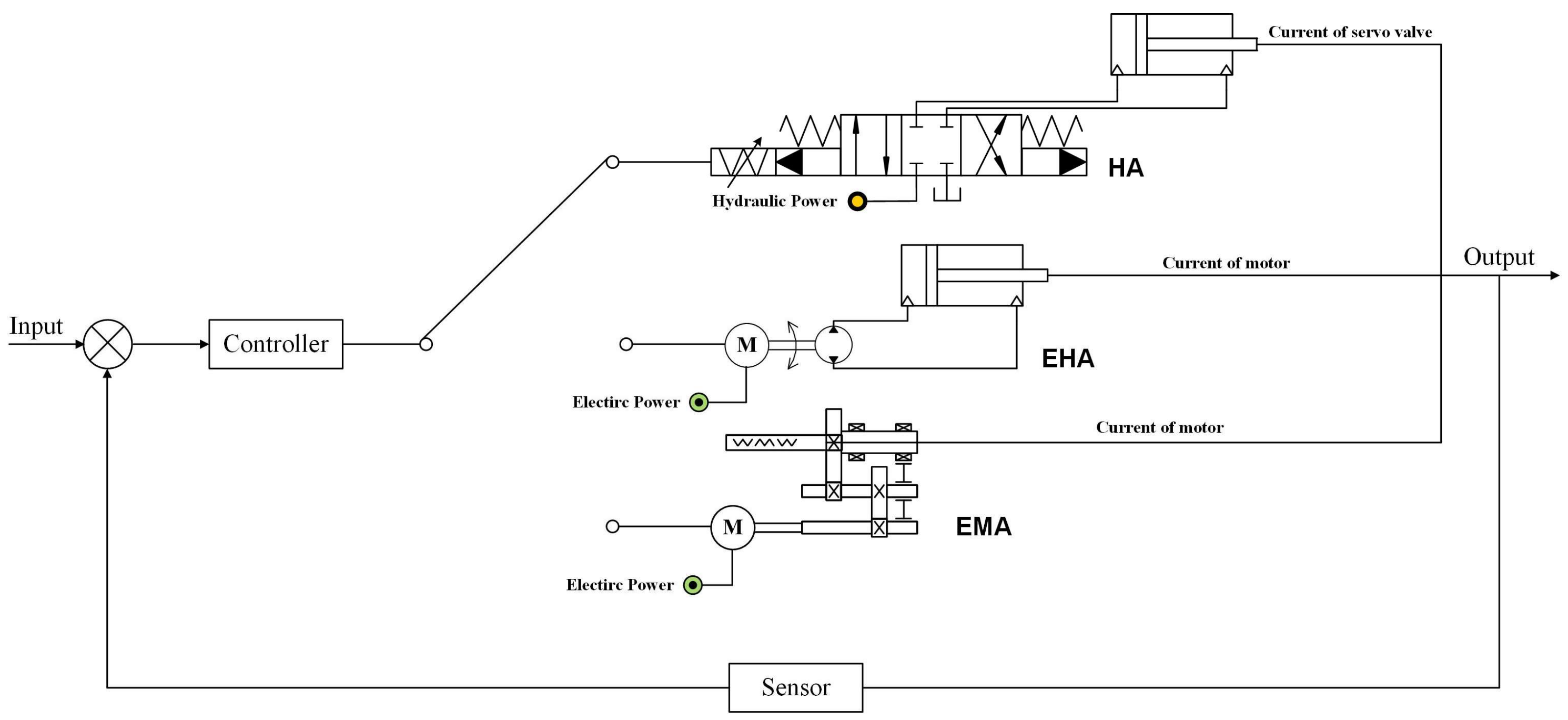
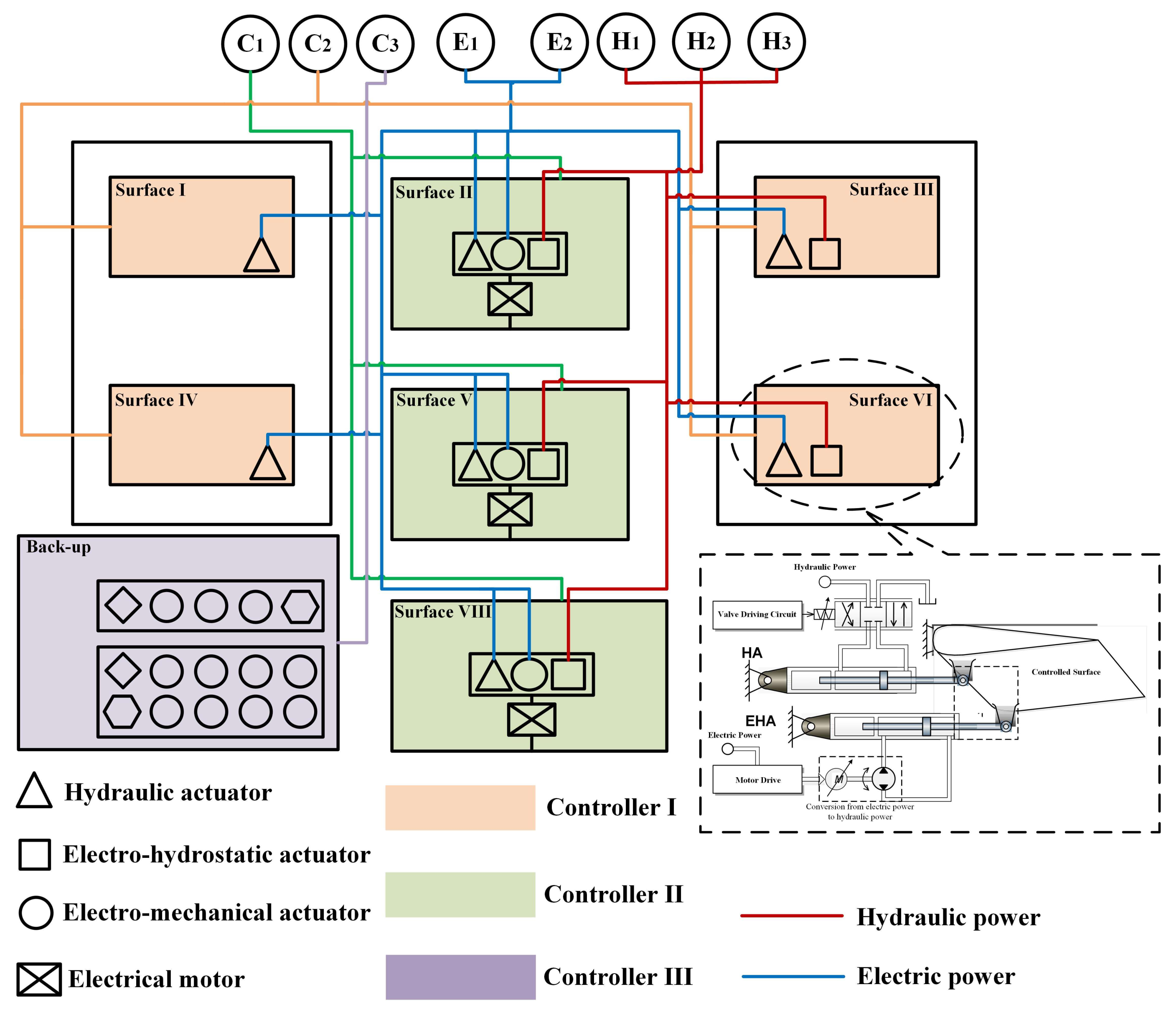
2.1. Single Control System Structure
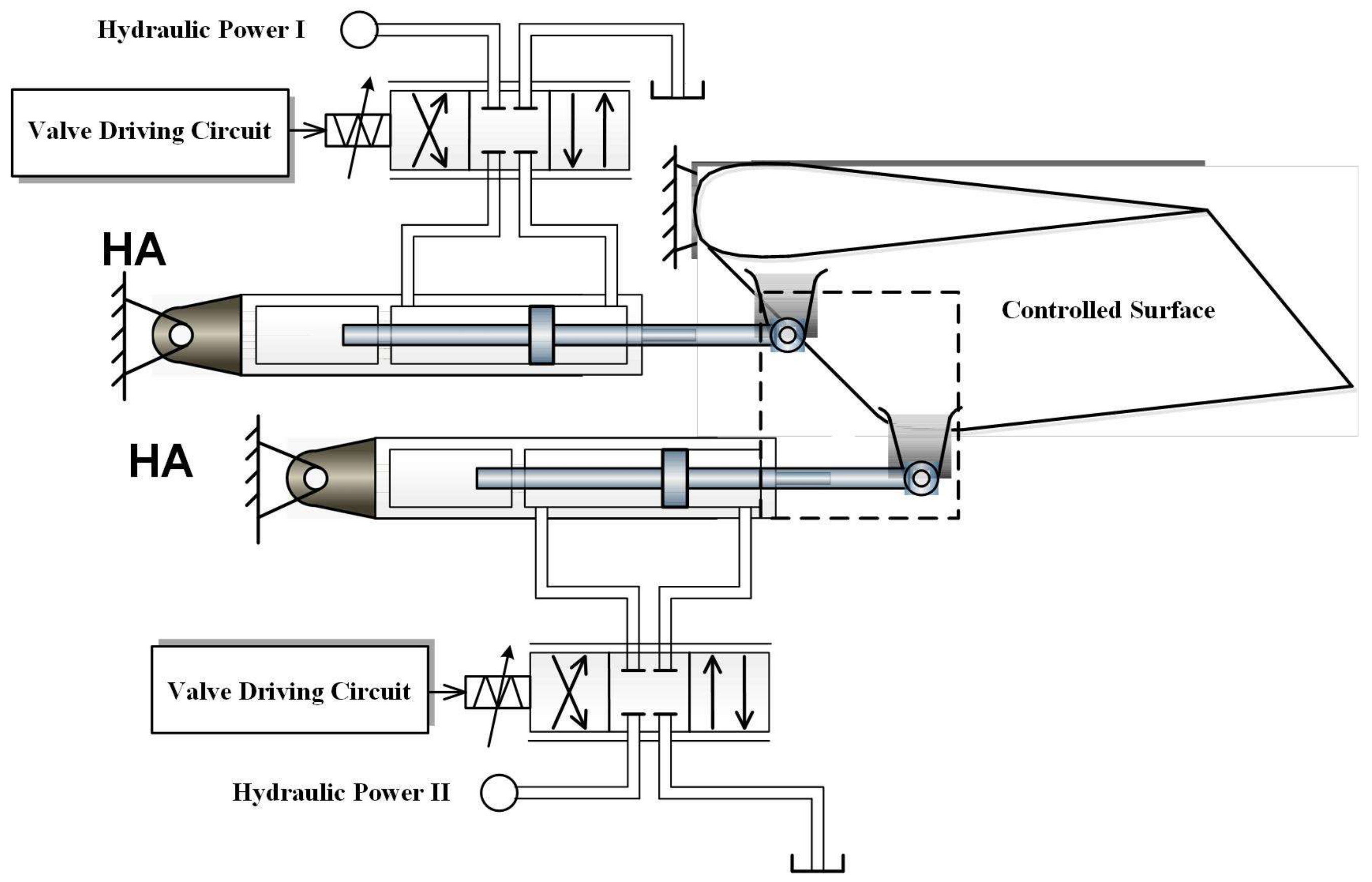
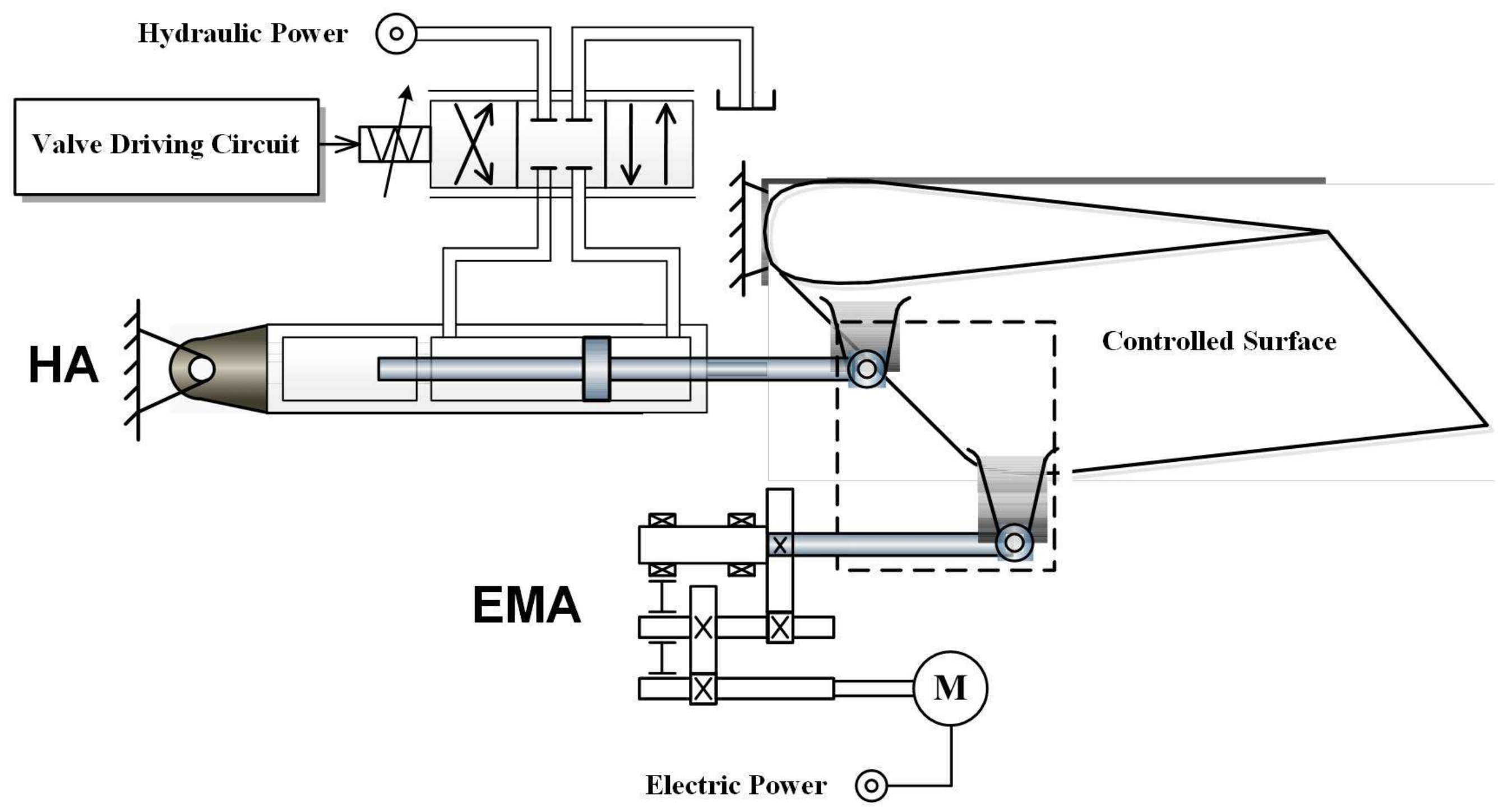
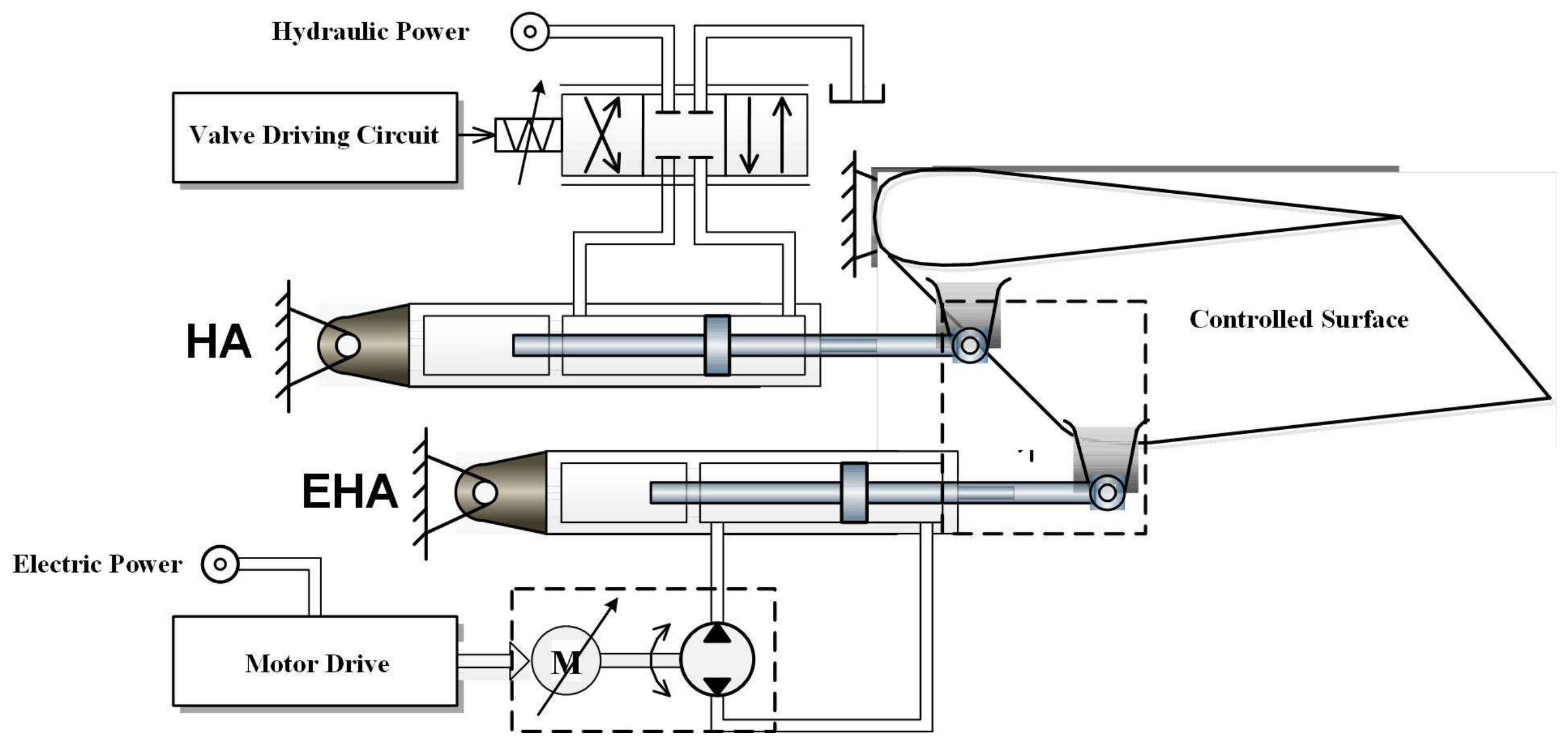
2.2. Redundant Configuration of Actuation System
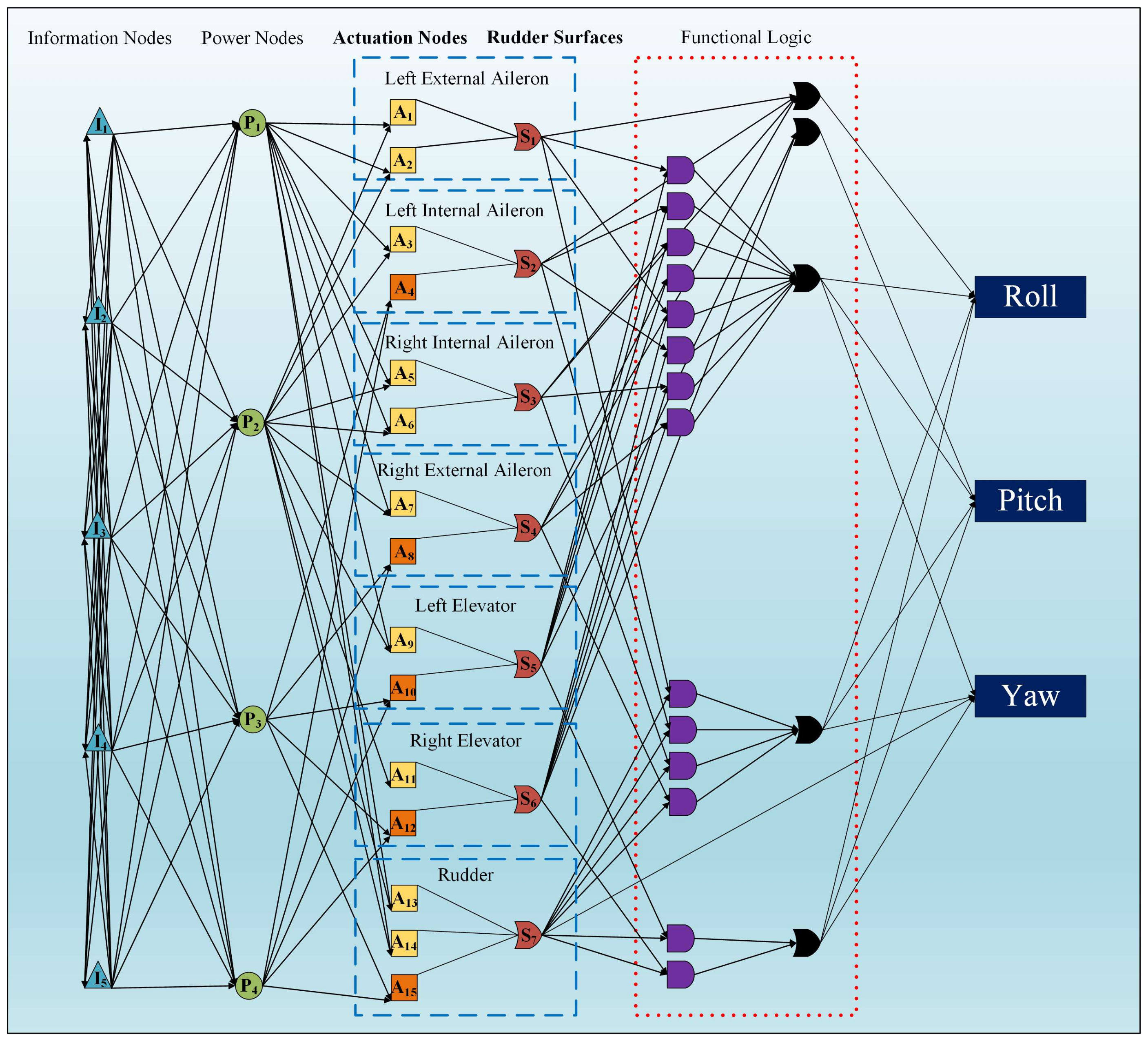
2.3. Redundant Configuration of More Electric Control System
3. Multi-Objective Optimization of MECS Based on NSGA-II and AHP
3.1. Multi-Objective Optimization Modeling of MECS
3.1.1. Objective Function
3.1.2. Constraint Conditions
- Weight
- Power efficiency
- Cost
3.1.3. Design Variables
- The quantity of design variates ought to be decreased to the utmost extent. Overall, the quantity of design variates in mechanical optimization design should not surpass 5.
- The variables ought to exert a remarkable impact on the goal function. Indexes affecting the constraint and property directly ought to be chosen as design variates.
- The chosen variates ought to be independent.
- The variates ought to be chosen as per the optimization goal.
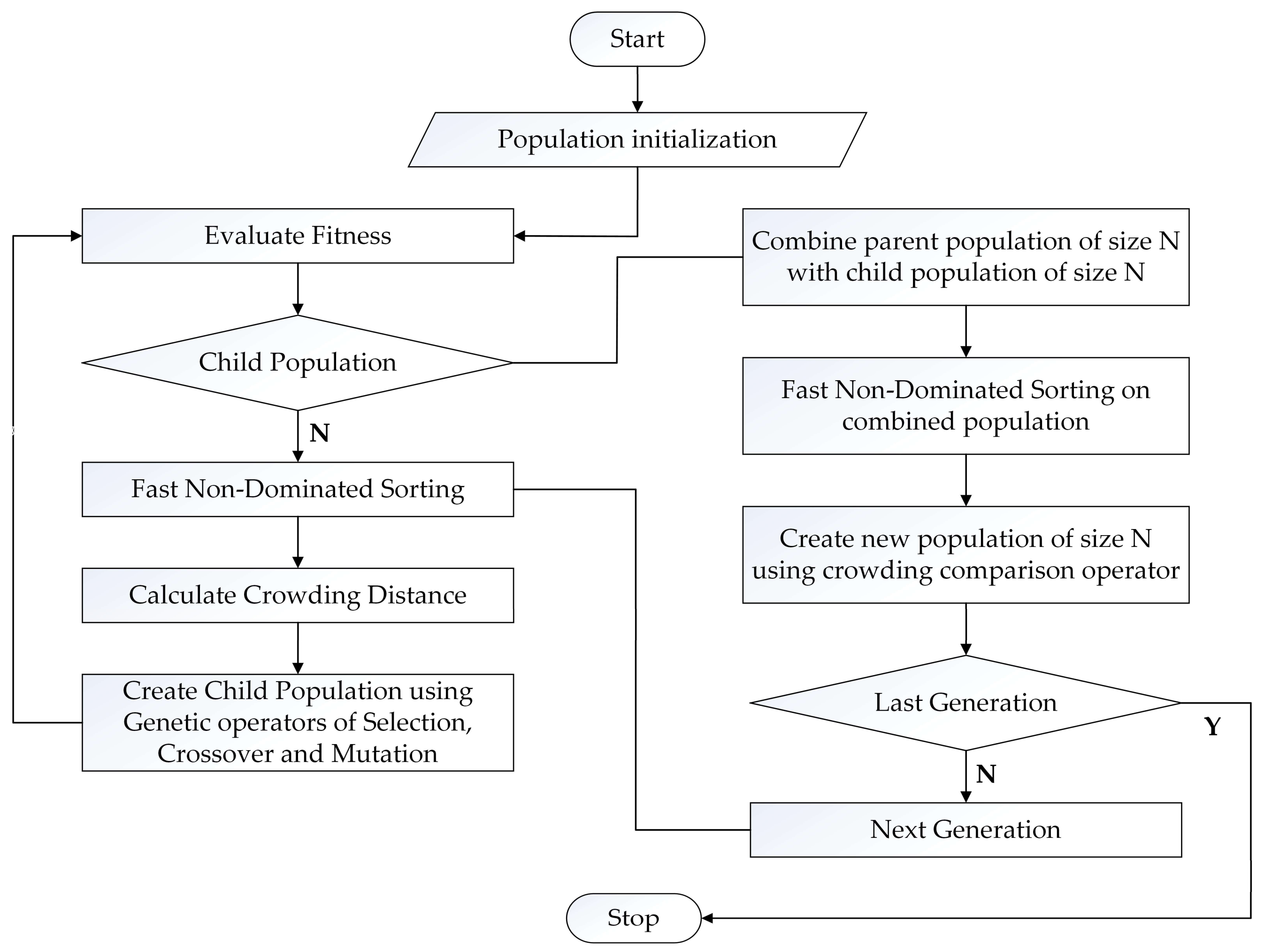
3.2. Multi-Objective Optimization Based on NSGA-II
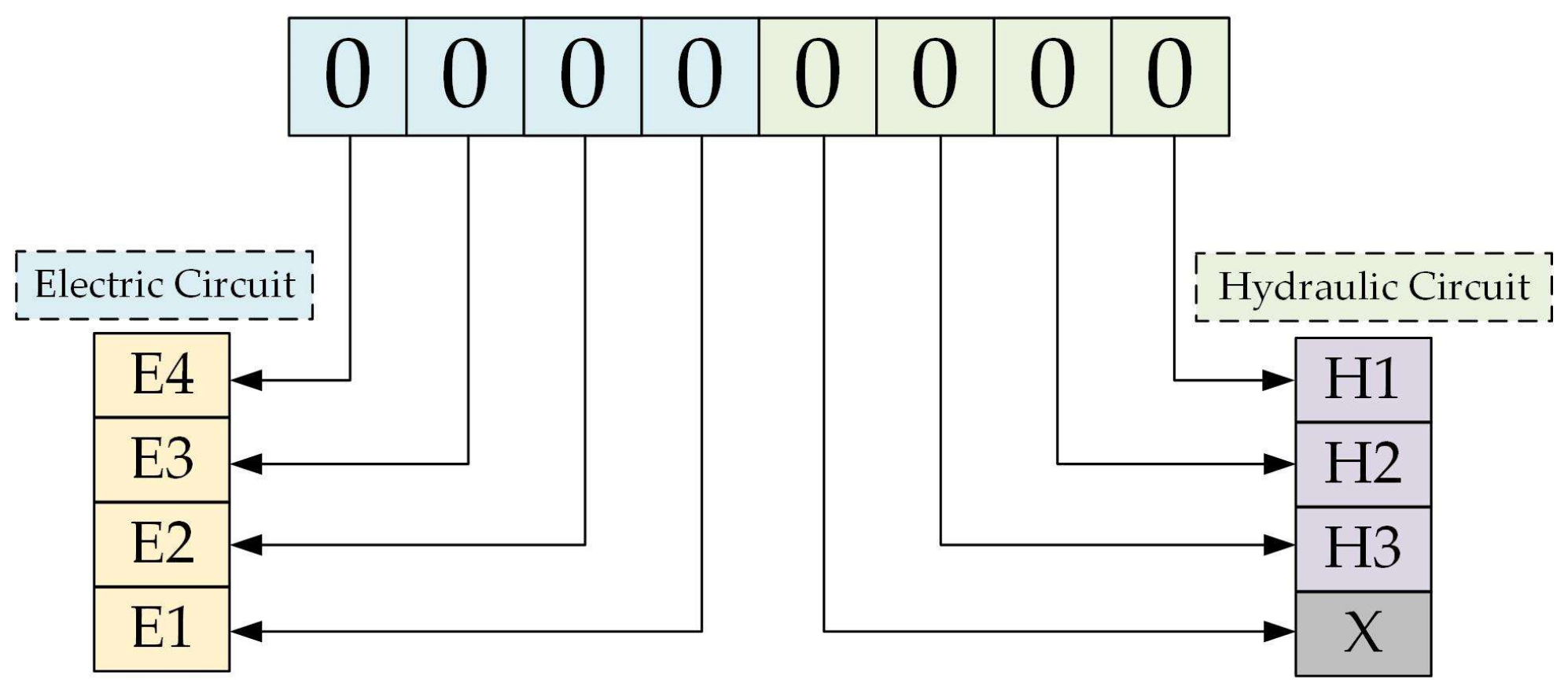
3.2.1. Encoding and Decoding
3.2.2. Fast Non-Dominated Sorting
| Algorithm 1: Fast non-dominated sorting |
| 1: Fast-non-dominated-sort () |
| 2: for each 3: for each 4: if , then # if is dominated by , then add to 5: 6: else if , then 7: 8: if , then 9: , # when of the individual is 0, then this individual is the first level of Pareto 10: The comparison of dominating relationships between individuals, and , are introduced for storage and records, respectively; represents the comparison of dominating relationships. The solution of is stored in the records of level 1, and the solution of level 1 has higher priority than that of level 2. 11: i = 1. 12: while do 13: H= 14: for each 15: for each # Sort all the individuals in 16: 17: if , then # when of the individual is 0, it is a non-dominated individual 18: # The Pareto level of this individual is the current highest level plus 1. At this moment, the initial value of i was 0, so we added 2. 19: end while 20: 21: Loop the program to obtain level 2, level 3… The computational complexity is |
3.2.3. Crowding Degree Calculation
- Define the crowding degree of every individual in population as ;
- Define the crowding degree and of boundary individuals as according to each evaluation indicator;
- Define the crowding degree of marginal individuals as a larger number to prioritize individuals on the sorting edge; thus, the crowding degree of any other individual can be expressed as
3.2.4. Optimal Selection
- The first step is the rank comparison. Select two individuals and randomly and make comparison between (the non-dominated rank of individual ) and (the non-dominated rank of individual ). When , is better than and vice versa. Moreover, the crowding degree requires to be compared when ;
- The second step is the crowding degree comparison. When condition is satisfied, it indicates that individual is better; otherwise, individual is better. Then, the better individual is selected to continue the following optimal processes.
3.2.5. Crossover
3.2.6. Mutation
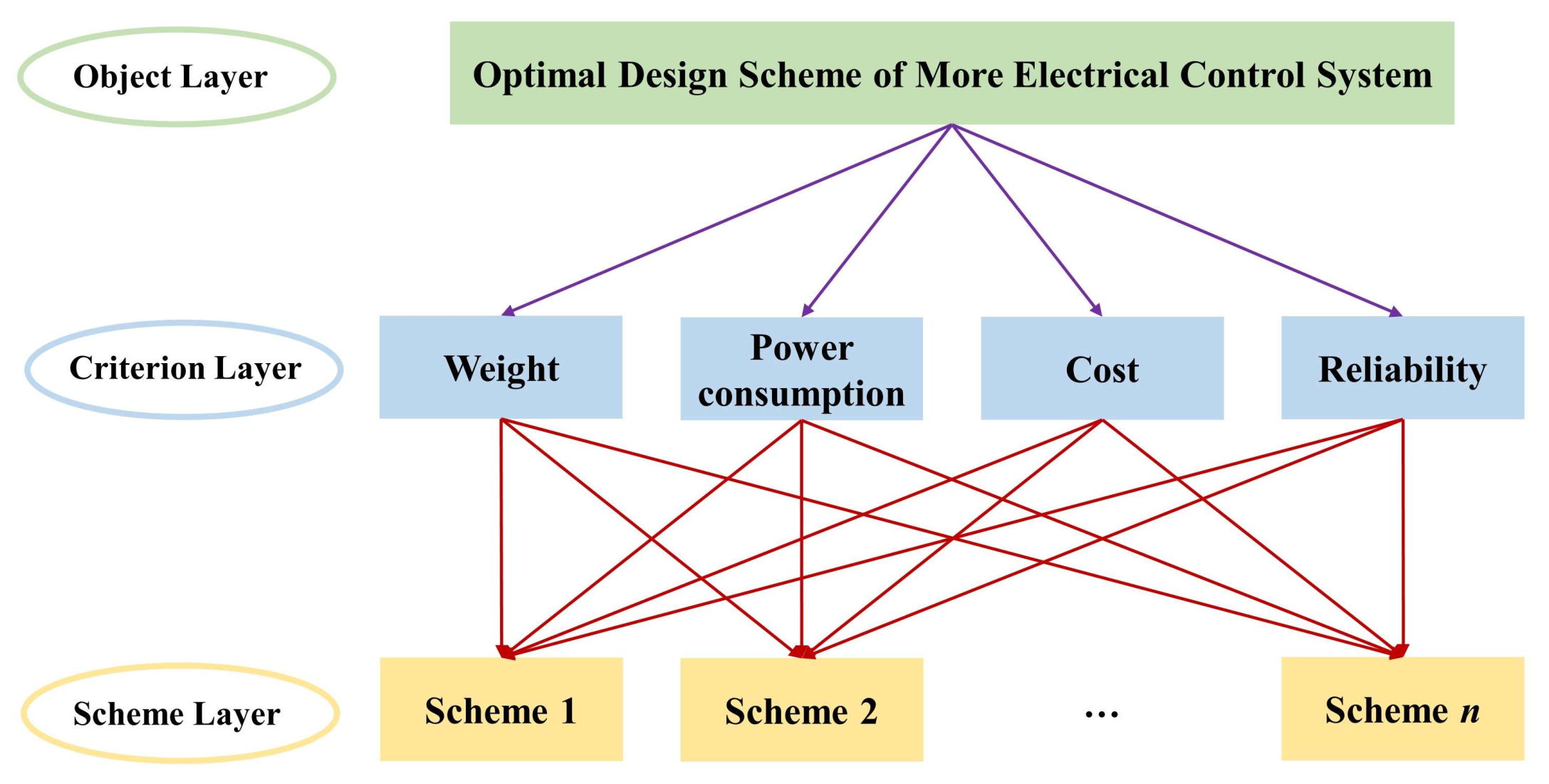
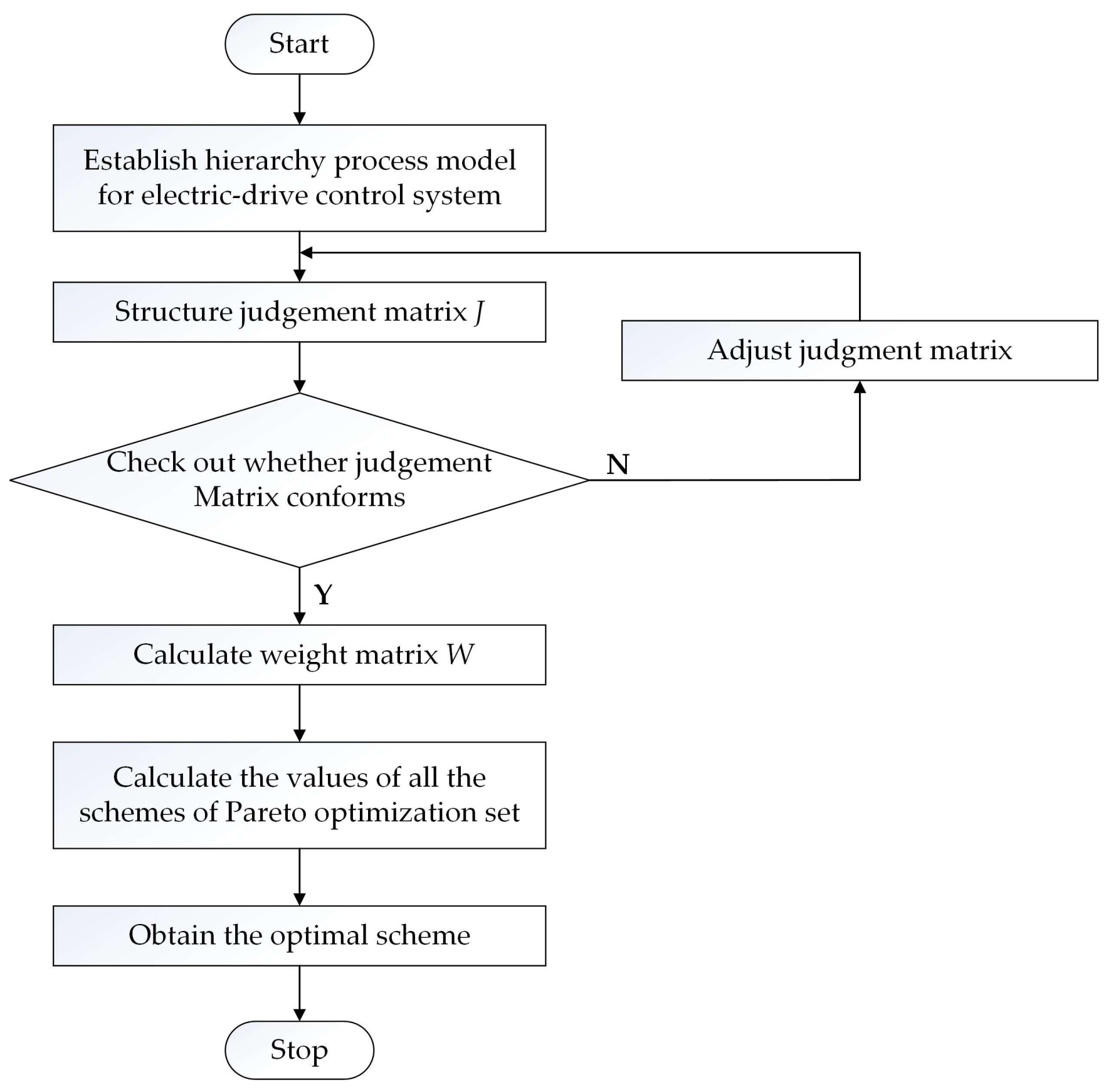
3.3. Comprehensive Evaluation of System Configuration Based on AHP
- Construct the decision-making model for AHP according to Figure 8.
- Structure the judgement matrix . Judgement matrix is established as per the association between the goals in the criterion layer.
- 3.
- Validate the judgement matrix coherence. Coherence index is computed via:
- 4.
- Compute the weighted coefficient between the contrasted elements with the relevant standards. Compute the continued product of each row element in , the product of every row element, and its n-th root .
- 5.
- Speculate the design in the Pareto frontier as per the weighted coefficients of every standard, and afterwards get the optimum design of MECS.
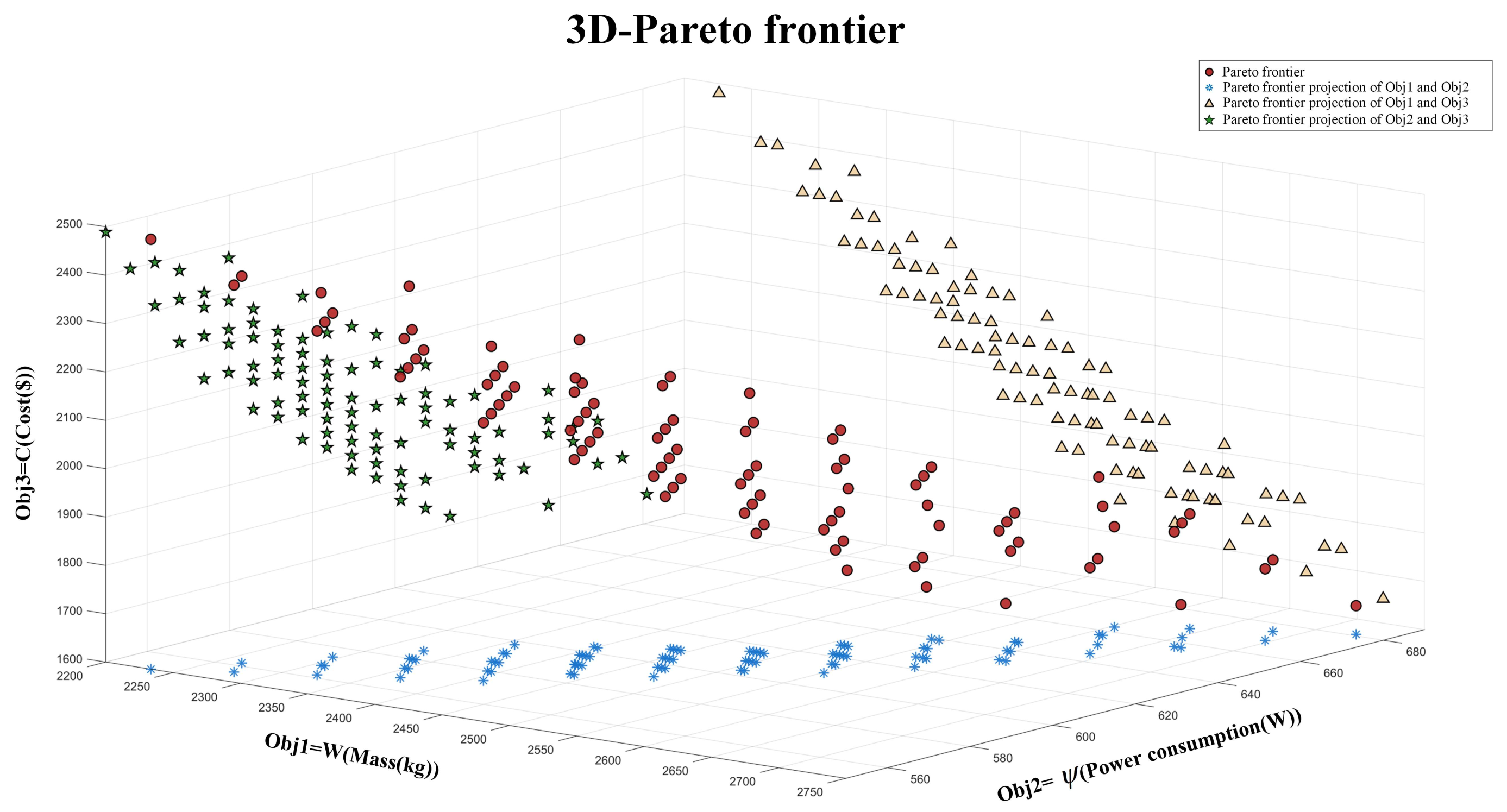
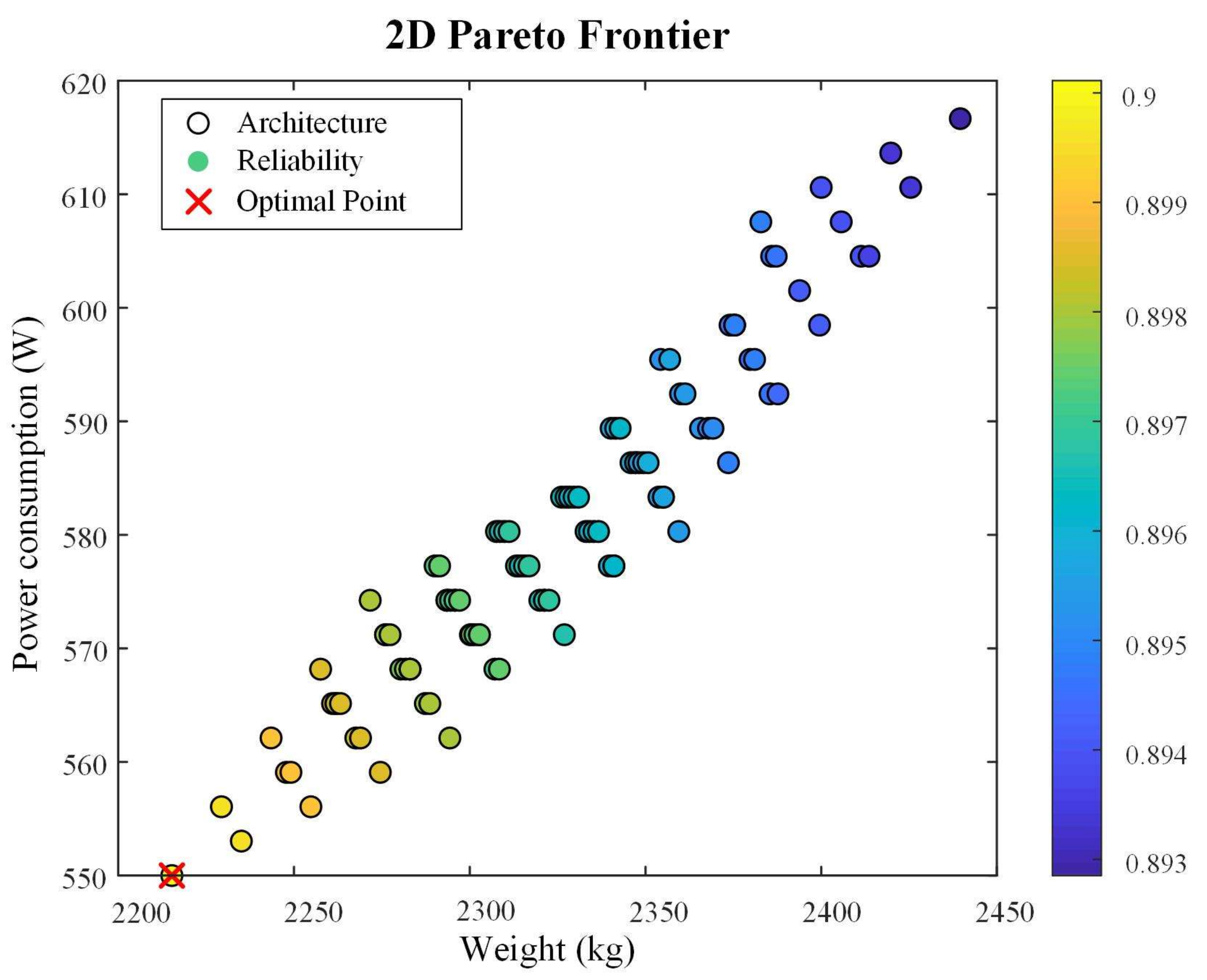
4. Case Study and Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sun, K.; Gebre-Egziabher, D. Air data fault detection and isolation for small UAS using integrity monitoring framework. Navig.-J. Inst. Navig. 2021, 68, 577–600. [Google Scholar] [CrossRef]
- Kotyegov, V.; Kutovoy, S. Transfer of aerospace technologies for ensuring safety of industrial and civil objects. In Proceedings of the Second IEEE International Workshop on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications, 2003 Proceedings, Lviv, Ukraine, 8–10 September 2003; pp. 136–138. [Google Scholar]
- Cossentino, M.; Lopes, S.; Renda, G.; Sabatucci, L.; Zaffora, F. Smartness and autonomy for shipboard power systems reconfiguration. In Proceedings of the International Conference on Modelling and Simulation for Autonomous Systems, Palermo, Italy, 29–31 October 2019; pp. 317–333. [Google Scholar]
- Joung, E.; Lee, H.; Oh, S.; Kim, G. Derivation of railway software safety criteria and management procedure. In Proceedings of the 2009 International Conference on Information and Multimedia Technology, Jeju, Korea, 16–18 December 2009; pp. 64–67. [Google Scholar]
- Cai, B.G.; Jin, C.M.; Ma, L.C.; Cao, Y.; Nakamura, H. Analysis on the application of on-chip redundancy in the safety-critical system. IEICE Electron. Express 2014, 11, 20140153. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.P.; Cui, X.Y.; Jian, S.; Tomovic, M.M.; Jiao, Z.X. Modeling of reliability and performance assessment of a dissimilar redundancy actuation system with failure monitoring. Chin. J. Aeronaut. 2016, 29, 799–813. [Google Scholar] [CrossRef] [Green Version]
- Li, T.Y.; Chen, T.T.; Ye, K.; Jiang, X.X. Research and simulation of marine electro-hydraulic steering gear system based on EASY5. In Proceedings of the IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; pp. 1972–1979. [Google Scholar]
- Jiao, Z.; Yu, B.; Wu, S.; Shang, Y.; Huang, H.; Tang, Z.; Wei, R.; Li, C. An intelligent design method for actuation system architecture optimization for more electrical aircraft. Aerosp. Sci. Technol. 2019, 93, 105079. [Google Scholar] [CrossRef]
- Sarlioglu, B.; Morris, C.T. More electric aircraft: Review, challenges, and opportunities for commercial transport aircraft. IEEE Trans. Transp. Electrif. 2015, 1, 54–64. [Google Scholar] [CrossRef]
- Benzaquen, J.; He, J.; Mirafzal, B. Toward more electric powertrains in aircraft: Technical challenges and advancements. CES Trans. Electr. Mach. Syst. 2021, 5, 177–193. [Google Scholar] [CrossRef]
- Arbaiy, N. Weighted linear fractional programming for possibilistic multi-objective problem. In Computational Intelligence in Information Systems; Springer: Cham, Switzerland, 2015; pp. 85–94. [Google Scholar]
- Marler, R.T.; Arora, J.S. The weighted sum method for multi-objective optimization: New insights. Struct. Multidiscip. Optim. 2010, 41, 853–862. [Google Scholar] [CrossRef]
- Du, Y.; Xie, L.; Liu, J.; Wang, Y.; Xu, Y.; Wang, S. Multi-objective optimization of reverse osmosis networks by lexicographic optimization and augmented epsilon constraint method. Desalination 2014, 333, 66–81. [Google Scholar] [CrossRef]
- Yang, X.; Leng, Z.; Xu, S.; Yang, C.; Yang, L.; Liu, K.; Song, Y.; Zhang, L. Multi-objective optimal scheduling for CCHP microgrids considering peak-load reduction by augmented ε-constraint method. Renew. Energy 2021, 172, 408–423. [Google Scholar] [CrossRef]
- Anastasopoulos, P.C.; Sarwar, M.T.; Shankar, V.N. Safety-oriented pavement performance thresholds: Accounting for unobserved heterogeneity in a multi-objective optimization and goal programming approach. Anal. Methods Accid. Res. 2016, 12, 35–47. [Google Scholar] [CrossRef]
- De, P.; Deb, M. Using goal programming approach to solve fuzzy multi-objective linear fractional programming problems. In Proceedings of the 2016 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Chennai, India, 15–17 December 2016; pp. 1–5. [Google Scholar]
- Anukokila, P.; Radhakrishnan, B.; Anju, A. Goal programming approach for solving multi-objective fractional transportation problem with fuzzy parameters. RAIRO-Oper. Res. 2019, 53, 157–178. [Google Scholar] [CrossRef] [Green Version]
- Chang, Y.F.; Xie, H.; Huang, W.C.; Zeng, L. An improved multi-objective quantum genetic algorithm based on cellular automaton. In Proceedings of the 9th IEEE International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 23–25 November 2018; pp. 342–345. [Google Scholar]
- Altay, E.V.; Alatas, B. Differential evolution and sine cosine algorithm based novel hybrid multi-objective approaches for numerical association rule mining. Inf. Sci. 2021, 554, 198–221. [Google Scholar] [CrossRef]
- Tang, Q.R.; Li, Y.H.; Deng, Z.Q.; Chen, D.; Guo, R.Q.; Huang, H. Optimal shape design of an autonomous underwater vehicle based on multi-objective particle swarm optimization. Nat. Comput. 2020, 19, 733–742. [Google Scholar] [CrossRef]
- Su, S.J.; Han, J.; Xiong, Y.P. Optimization of unmanned ship’s parametric subdivision based on improved multi-objective PSO. Ocean Eng. 2019, 194, 106617. [Google Scholar] [CrossRef]
- Guria, C.; Bhattacharya, P.K.; Gupta, S.K. Multi-objective optimization of reverse osmosis desalination units using different adaptations of the non-dominated sorting genetic algorithm (NSGA). Comput. Chem. Eng. 2005, 29, 1977–1995. [Google Scholar] [CrossRef]
- Srinivas, N.; Deb, K. Muiltiobjective optimization using nondominated sorting in genetic algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Yu, H.L.; Castelli-Dezza, F.; Cheli, F.; Tang, X.L.; Hu, X.S.; Lin, X.K. Dimensioning and power management of hybrid energy storage systems for electric vehicles with multiple optimization criteria. IEEE Trans. Power Electron. 2021, 36, 5545–5556. [Google Scholar] [CrossRef]
- Xia, G.; Liu, C.; Chen, X. Multi-objective optimization for AUV conceptual design based on NSGA-II. In Proceedings of the OCEANS 2016-Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–6. [Google Scholar]
- Alam, K.; Ray, T.; Anavatti, S. Design and construction of an autonomous underwater vehicle. Neurocomputing 2014, 142, 16–29. [Google Scholar] [CrossRef]
- Liu, X.Y.; Yuan, Q.Q.; Zhao, M.; Cui, W.C.; Ge, T. Multiple objective multidisciplinary design optimization of heavier-than-water underwater vehicle using CFD and approximation model. J. Mar. Sci. Technol. 2017, 22, 135–148. [Google Scholar] [CrossRef]
- Yu, B.; Wu, S.; Jiao, Z.X.; Shang, Y.X. Multi-objective optimization design of an electrohydrostatic actuator based on a particle swarm optimization algorithm and an analytic hierarchy process. Energies 2018, 11, 2426. [Google Scholar] [CrossRef] [Green Version]
- Cheng, X.; He, X.Y.; Dong, M.; Xu, Y.F. Transformer fault probability calculation based on analytic hierarchy process. In Proceedings of the 2021 International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence (ICSMD), Nanjing, China, 21–23 October 2021; pp. 1–6. [Google Scholar]
- Medineckiene, M.; Zavadskas, E.K.; Björk, F.; Turskis, Z. Multi-criteria decision-making system for sustainable building assessment/certification. Arch. Civ. Mech. Eng. 2015, 15, 11–18. [Google Scholar] [CrossRef]
- Altuzarra, A.; Gargallo, P.; Moreno-Jiménez, J.M.; Salvador, M. Influence, relevance and discordance of criteria in AHP-Global Bayesian prioritization. Int. J. Inf. Technol. Decis. Mak. 2013, 12, 837–861. [Google Scholar] [CrossRef]
- Wu, S.; Yu, B.; Jiao, Z.X.; Shang, Y.X. Preliminary design and multi-objective optimization of electro-hydrostatic actuator. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2017, 231, 1258–1268. [Google Scholar] [CrossRef]
- Lampl, T.; Knigsberger, R.; Hornung, M. Design and evaluation of distributed electric drive architectures for high-lift control systems. In Deutsche Luft- und Raumfahrtkongress; Technische Universität München: Munich, Germany, 2017. [Google Scholar]
- Zhao, T. Acquisition Cost Estimating Methodology for Aircraft Conceptual Design. Ph.D. Thesis, Cranfield University, Cranfield, UK, 2004. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Redundancy | Actuator Type | Power Supply |
|---|---|---|
| Dual redundancies | HA, HA | Hydraulic power |
| HA, EMA | Hydraulic and electric power | |
| HA, EHA | Hydraulic and electric power | |
| Triple redundancies | HA, EHA, and EMA | Hydraulic and electric power |
| n | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| RI | 0.00 | 0.00 | 0.58 | 0.90 | 1.12 | 1.24 | 1.32 | 1.41 | 1.45 |
| Objectives | Weight | Power Dissipation | Cost | Reliability |
|---|---|---|---|---|
| Weight | 1 | 3 | 9 | 1 |
| Power dissipation | 1/3 | 1 | 1/3 | 1/3 |
| Cost | 1/9 | 1/3 | 1 | 1/9 |
| Reliability | 1 | 3 | 9 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, Z.; Wang, S.; Shi, J.; Liu, D.; Chen, R. Reliability-Oriented Configuration Optimization of More Electrical Control Systems. Aerospace 2022, 9, 85. https://doi.org/10.3390/aerospace9020085
Liao Z, Wang S, Shi J, Liu D, Chen R. Reliability-Oriented Configuration Optimization of More Electrical Control Systems. Aerospace. 2022; 9(2):85. https://doi.org/10.3390/aerospace9020085
Chicago/Turabian StyleLiao, Zirui, Shaoping Wang, Jian Shi, Dong Liu, and Rentong Chen. 2022. "Reliability-Oriented Configuration Optimization of More Electrical Control Systems" Aerospace 9, no. 2: 85. https://doi.org/10.3390/aerospace9020085
APA StyleLiao, Z., Wang, S., Shi, J., Liu, D., & Chen, R. (2022). Reliability-Oriented Configuration Optimization of More Electrical Control Systems. Aerospace, 9(2), 85. https://doi.org/10.3390/aerospace9020085