
Bifurcations of Periodic Orbits in the Gravitational Field of Irregular Bodies: Applications to Bennu and Steins



Abstract
:1. Introduction
2. Dynamic Equations and Basic Notations
3. Periodic Orbits and Associated Submanifolds
3.1. The Eigenstructure of the Monodromy Matrix and Invariant Manifolds
- (i)
- It is symplectic, i.e., it satisfies the matrix identity:
- (ii)
- The characteristic polynomial satisfies:
- (iii)
- Therefore, if is an eigenvalue, then are eigenvalues with the same multiplicity. Moreover, we have .
3.2. The Traces of the Monodromy Matrix and Its Square Matrix
- (a)
- If , and are hyperbolic and the corresponding characteristic multipliers are of form ( is of multiplicity 2);
- (b)
- If , are parabolic and the corresponding characteristic multipliers are 1(multiplicity 6);
- (c)
- If , and are elliptic and the characteristic multipliers are of form ( multiplicity 2), 1(multiplicity 2);
- (d)
- If , are parabolic and the characteristic multipliers are of form −1(multiplicity 4), 1(multiplicity 2);
- (e)
- If , and are hyperbolic and the characteristic multipliers are of form (multiplicity 2, ), 1(multiplicity 2).
- (a)
- Note that holds if and only if , and the other four multipliers are of the form .
- (b)
- Similarly, holds if and only if , and the other four multipliers are of the form .
- (c)
- The inequality holds if and only if , and the other four multipliers are of the form .
- (d)
- Note that holds if and only if and the other four multipliers are of the form .
- (e)
- The inequality holds if and only if , and the other four multipliers are of the form .
- (f)
- The inequality holds if and only if , and the other four multipliers are of the form .
- (g)
- When either or is equal to −2 or 2, there must exist at least two characteristic multipliers equal to −1 or +1. This case can be analyzed similarly. Here, we omit the details.
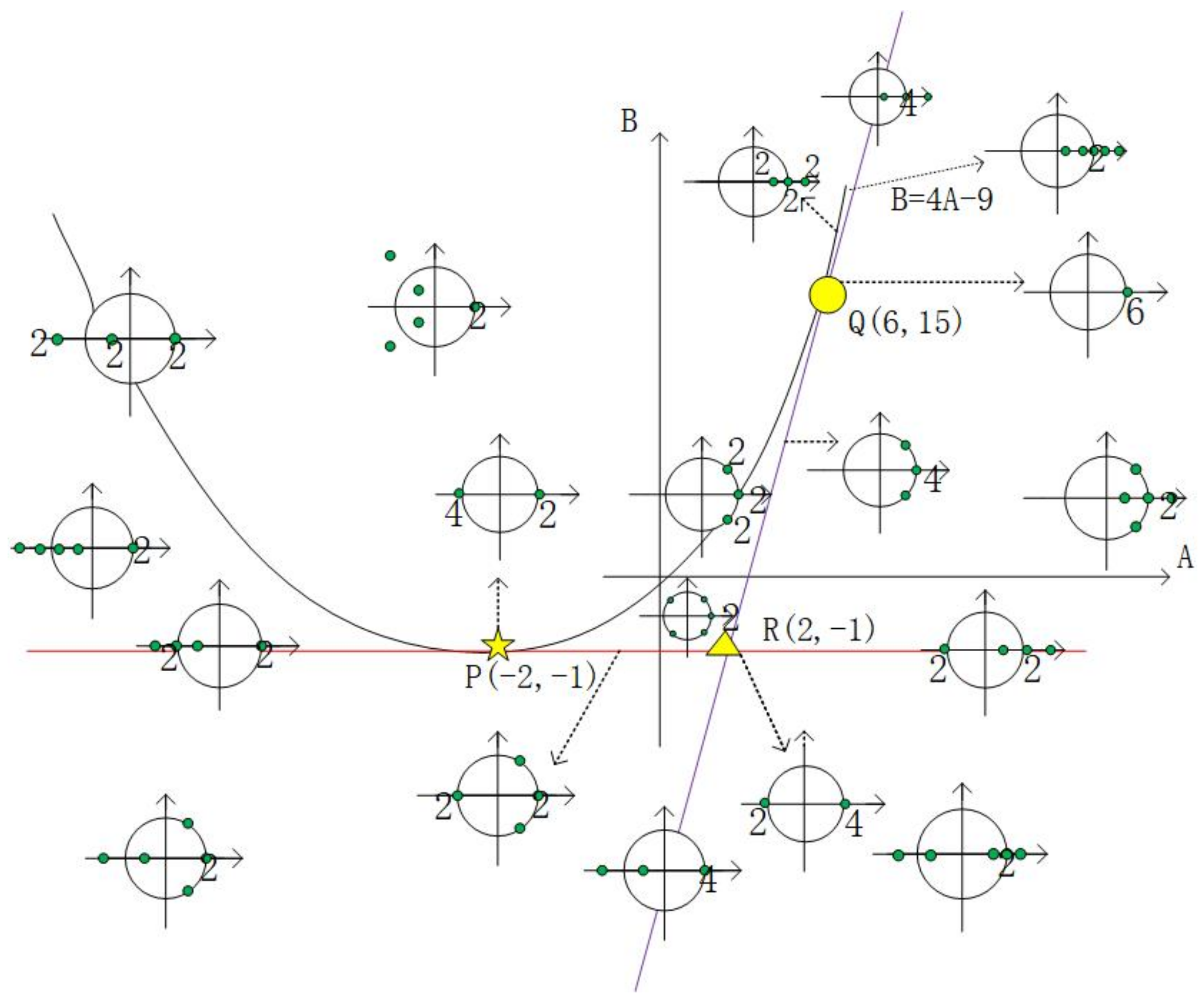
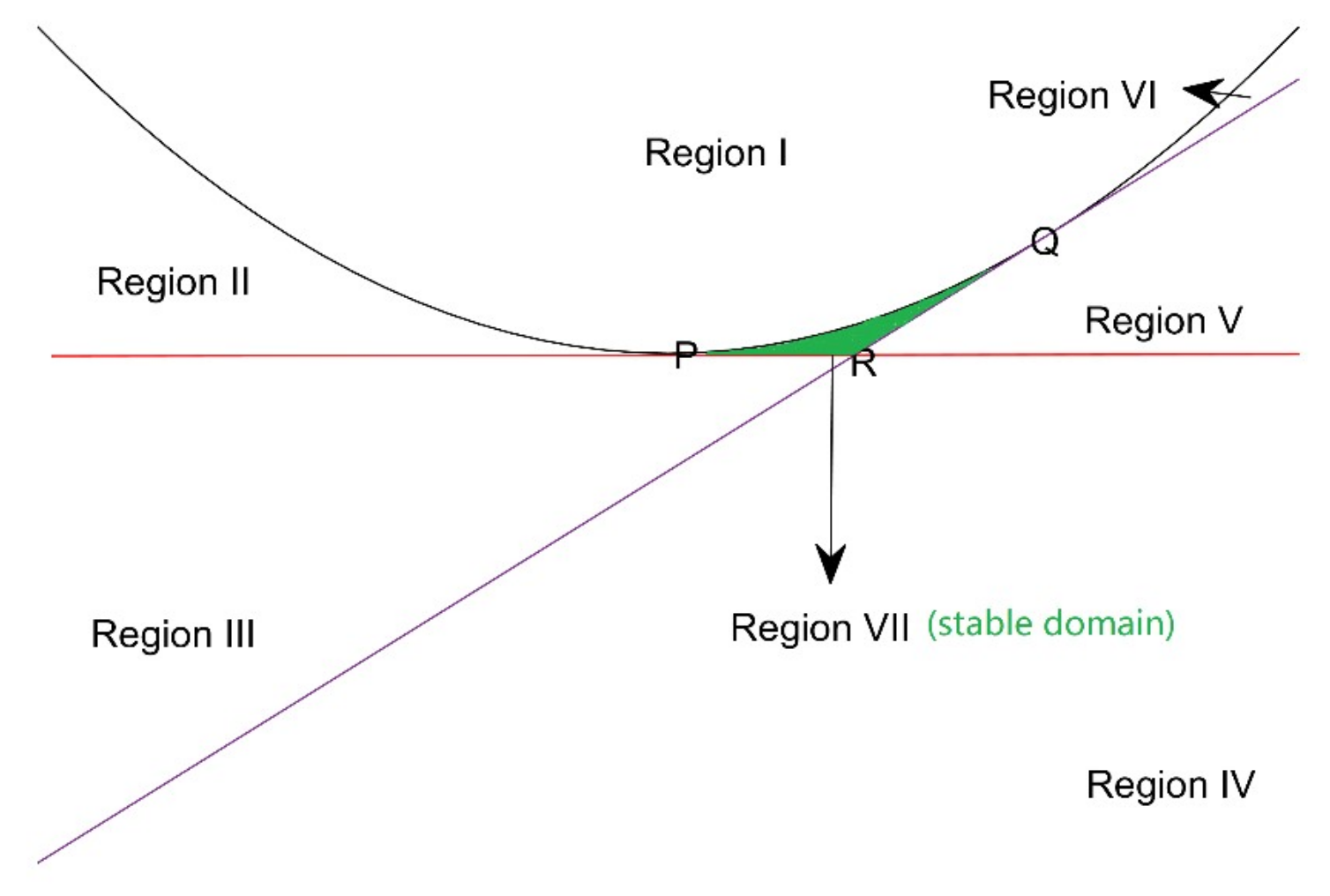
3.3. The Topological Types and Bifurcations of Periodic Orbits in (A, B) Plane
- (a)
- , which corresponds to a parabola in the (A, B) plane;
- (b)
- , which is a straight line tangent to the parabola in (a) at point ;
- (c)
- , which is a horizontal line tangent to the parabola in (a) at its vertex
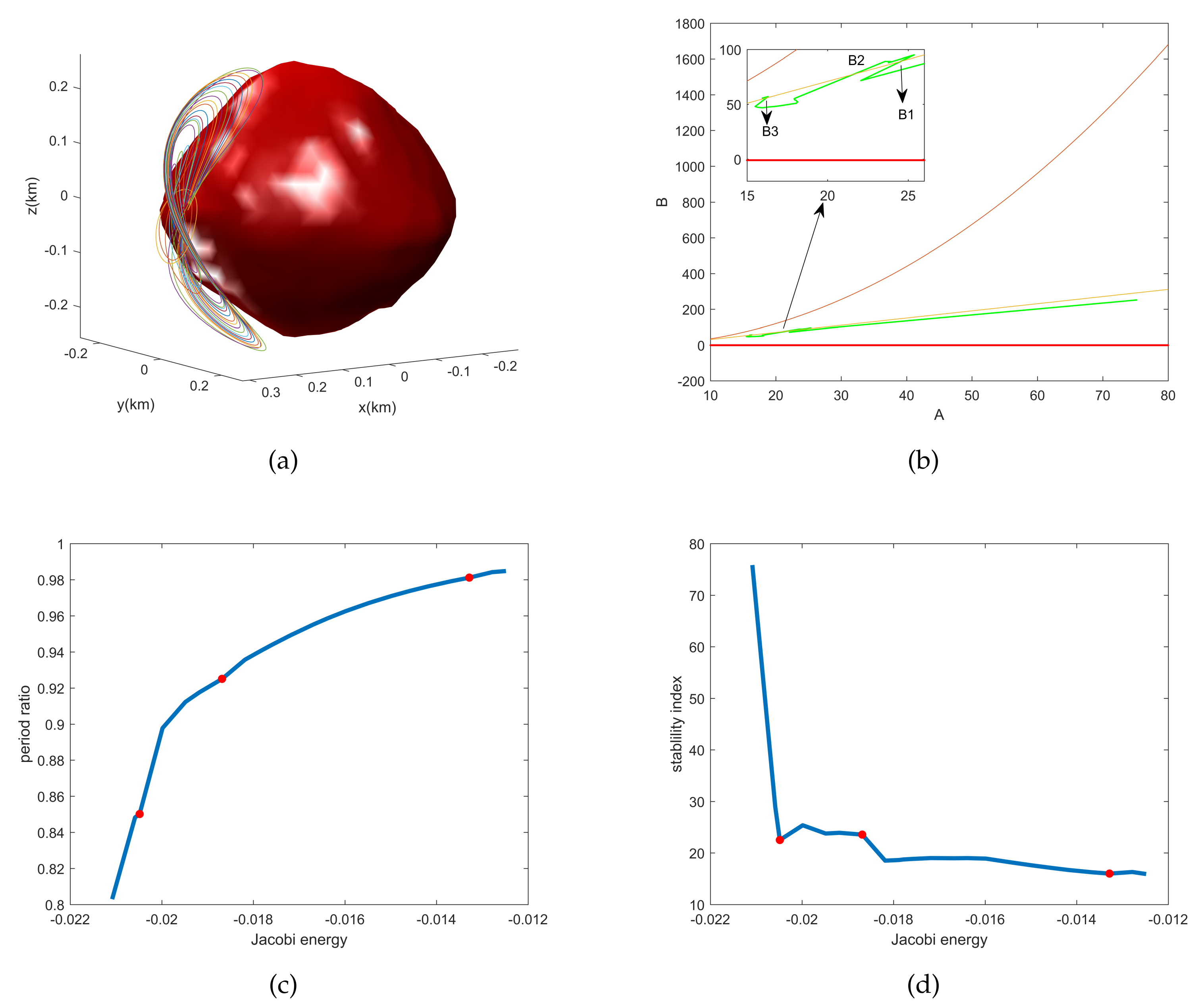
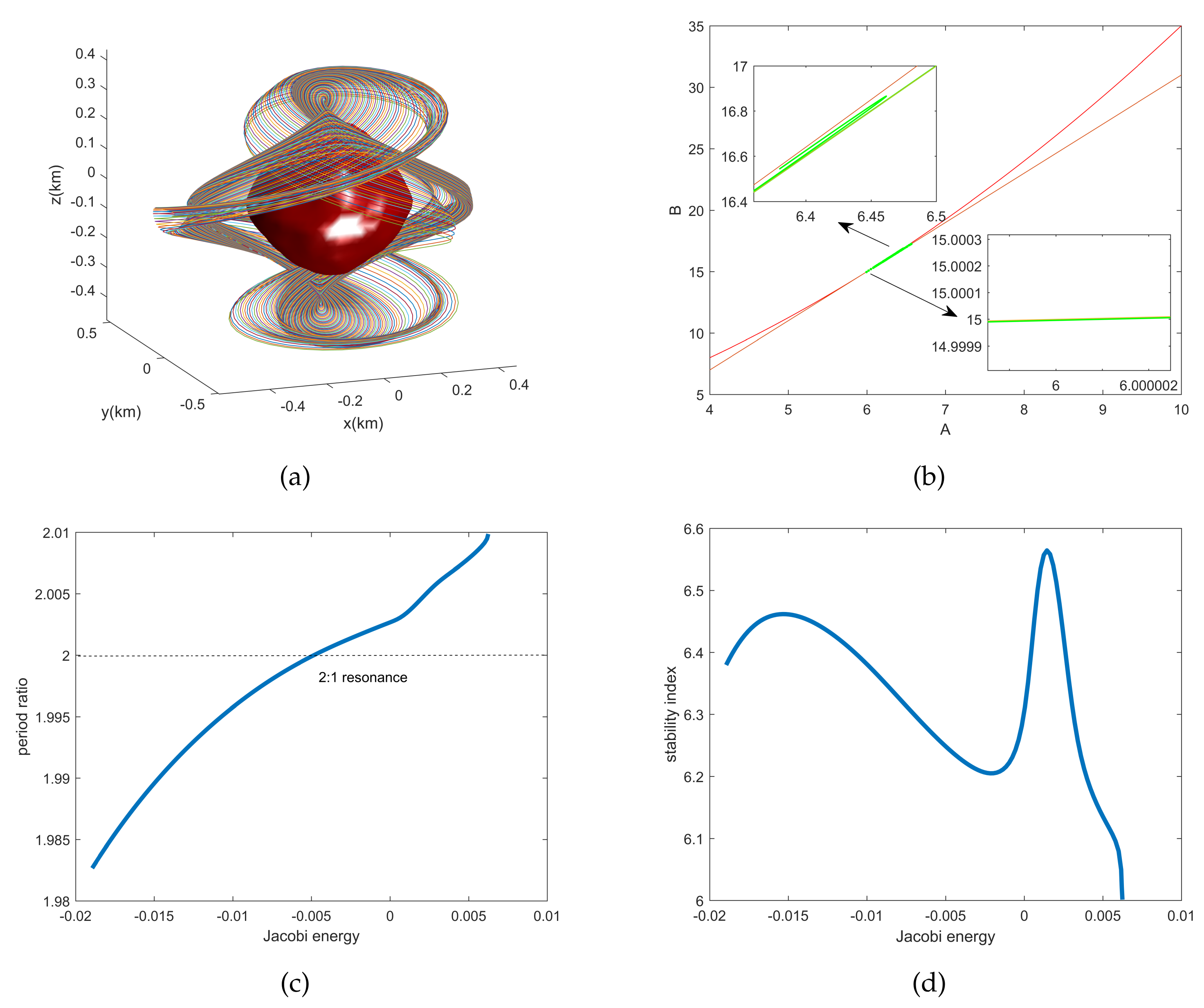
4. Applications to Periodic Orbits in the Gravitational Field of Irregular Bodies
- (i)
- A hierarchical gridding arithmetic by Yu and Baoyin [22] was applied here for a global search of periodic orbits.
- (ii)
- The periodic orbits searched in the former step can be numerically continued into a family by varying the Jacobi energy in appropriate step length. The continuation is conducted in the gradient direction of the energy integral in the phase space.Generally, the continuation process may stop in three cases: the curve of the orbit intersects with the surface of the body, the Jacobi energy reaches a local minimum or maximum and the orbit converges into an equilibrium point. However, it is also possible that the continuation of a periodic orbit can always be conducted. According to Kang et al. [27], in this case, the periodic orbit will converge to a nearly circular periodic orbit in the equatorial plane with the multiplicity of an integer, and the periodic ratio will converge to that integer.
- (iii)
- We integrate Equation (5) to find the monodromy matrix for each periodic orbit in a common family. Then, parameters A and B can be easily calculated and plotted in the plane. Thus, the topological types and bifurcations of these orbits can be clearly obtained from the figure.
4.1. Applications to 101955 Bennu
4.2. Applications to 2867 Steins
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Belton, M.; Veverka, J.; Thomas, P.; Helfenstein, P.; Simonelli, D.; Chapman, C.; Davies, M.E.; Greeley, R.; Greenberg, R.; Head, J. Galileo Encounter with 951 Gaspra: First Pictures of an Asteroid. Science 1992, 257, 1647–1652. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scheeres, D.J.; Ostro, S.J.; Hudson, R.S.; Werner, R.A. Orbits Close to Asteroid 4769 Castalia. Icarus 1996, 121, 67–87. [Google Scholar] [CrossRef]
- Werner, R.A.; Scheeres, D.J. Exterior gravitation of a polyhedron derived and compared with harmonic and mascon gravitation representations of asteroid 4769 Castalia. Celest. Mech. Dyn. Astron. 1996, 65, 313–344. [Google Scholar] [CrossRef]
- Chanut, T.; Aljbaae, S.; Prado, A.; Carruba, V. Dynamics in the vicinity of (101955) Bennu: Solar radiation pressure effects in equatorial orbits. Mon. Not. R. Astron. Soc. 2017, 470, 2687–2701. [Google Scholar] [CrossRef]
- Aljbaae, S.; Chanut, T.G.G.; Carruba, V.; Souchay, J.; Prado, A.F.B.A.; Amarante, A. The dynamical environment of asteroid 21 Lutetia according to different internal models. Mon. Not. R. Astron. Soc. 2017, 464, 3552–3560. [Google Scholar] [CrossRef] [Green Version]
- Aljbaae, S.; Chanut, T.; Prado, A.; Carruba, V.; Hussmann, H.; Souchay, J.; Sanchez, D. Orbital stability near the (87) sylvia system. Mon. Not. R. Astron. Soc. 2019, 486, 2557–2569. [Google Scholar] [CrossRef]
- Aljbaae, S.; Prado, A.; Sanchez, D.M.; Hussmann, H. Analysis of the orbital stability close to the binary asteroid (90) Antiope. Mon. Not. R. Astron. Soc. 2020, 496, 1645–1654. [Google Scholar] [CrossRef]
- Jiang, Y. Equilibrium points and orbits around asteroid with the full gravitational potential caused by the 3D irregular shape. Astrodynamics 2018, 2, 361–373. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Baoyin, H.; Ma, X. Equilibria, periodic orbits around equilibria, and heteroclinic connections in the gravity field of a rotating homogeneous cube. Astrophys. Space Sci. 2011, 333, 409–418. [Google Scholar] [CrossRef]
- Liu, X.; Baoyin, H.; Ma, X. Periodic orbits around areostationary points in the Martian gravity field. Res. Astron. Astrophys. 2012, 12, 551–562. [Google Scholar] [CrossRef] [Green Version]
- Romanov, V.A.; Doedel, E.J. Periodic Orbits Associated with the Libration Points of the Homogeneous Rotating Gravitating Triaxial Ellipsoid. Int. J. Bifurcat. Chaos 2012, 22, 1230035. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Baoyin, H. Periodic Orbits Related to the Equilibrium Points in the Potential of Irregular-shaped Minor Celestial Bodies. Results Phys. 2019, 12, 368–374. [Google Scholar] [CrossRef]
- Hou, X.; Xin, X.; Feng, J. Forced motions around triangular libration points by solar radiation pressure in a binary asteroid system. Astrodynamics 2020, 4, 17–30. [Google Scholar] [CrossRef]
- Dichmann, D.J.; Doedel, E.J.; Paffenroth, R.C. The computation of periodic solutions of the 3-body problem using the numerical continuation software auto. In Proceedings of the Libration Point Orbits & Applications—The Conference, Aiguablava, Spain, 10–14 June 2002; pp. 429–488. [Google Scholar]
- Parker, J.S.; Lo, M.W. Unstable Resonant Orbits near Earth and Their Applications in Planetary Missions. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference & Exhibit, Providence, RI, USA, 16–19 August 2004. [Google Scholar]
- Jiang, Y.; Schmidt, J.; Li, H.; Liu, X.; Yang, Y. Stable periodic orbits for spacecraft around minor celestial bodies. Astrodynamics 2018, 2, 69–86. [Google Scholar] [CrossRef] [Green Version]
- Lian, Y. On the dynamics and control of the Sun—Earth L2 tetrahedral formation. Astrodynamics 2021, 5, 331–346. [Google Scholar] [CrossRef]
- Eros, A.; Elipe, A. A Simple Model for the Chaotic Motion Around (433) Eros. J. Astronaut. Sci. 2004, 51, 391–404. [Google Scholar]
- Sanchez, A.; Guedan, A. Nonlinear Stability Under a Logarithmic Gravity Field. Int. Math. J. 2003, 3, 435–453. [Google Scholar]
- Shang, H.; Wu, X.; Cui, P. Periodic orbits in the doubly synchronous binary asteroid systems and their applications in space missions. Astrophys. Space Sci. 2015, 355, 69–87. [Google Scholar] [CrossRef]
- Shang, H.; Wu, X.; Qin, X.; Qiao, D. Periodic motion near non-principal-axis rotation asteroids. Mon. Not. R. Astron. Soc. 2017, 471, 3234–3244. [Google Scholar] [CrossRef]
- Yu, Y.; Baoyin, H. Generating families of 3D periodic orbits about asteroids. Mon. Not. R. Astron. Soc. 2012, 427, 872–881. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Baoyin, H.; Jiang, Y. Constructing the natural families of periodic orbits near irregular bodies. Mon. Not. R. Astron. Soc. 2015, 453, 3269–3277. [Google Scholar] [CrossRef]
- Jiang, Y.; Baoyin, H.; Li, J.; Li, H. Orbits and manifolds near the equilibrium points around a rotating asteroid. Astrophys. Space Sci. 2014, 349, 83–106. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Yu, Y.; Baoyin, H. Topological Classifications and Bifurcations of Periodic Orbits in the Potential Field of Highly Irregular-shaped Celestial Bodies. Nonlinear. Dyn. 2015, 81, 119–140. [Google Scholar] [CrossRef] [Green Version]
- Lan, L.; Ni, Y.; Jiang, Y.; Li, J. Motion of the moonlet in the binary system 243 Ida. Acta Mech. Sin. 2018, 34, 214–224. [Google Scholar] [CrossRef]
- Kang, H.; Jiang, Y.; Li, H. Convergence of a periodic orbit family close to asteroids during a continuation. Results Phys. 2020, 19, 103353. [Google Scholar] [CrossRef]
- Zeng, X.; Alfriend, K. Periodic orbits in the Chermnykh problem. Astrodynamics 2017, 1, 41–55. [Google Scholar] [CrossRef]
- Scheeres, D. Orbital Motion in Strongly Perturbed Environments; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Broucke, R. Stability of periodic orbits in the elliptic restricted three-body problem. AIAA J. 1969, 7, 1003–1009. [Google Scholar] [CrossRef]
- Zagouras, C.; Markellos, V.V. Axisymmetric periodic orbits of the restricted problem in three dimensions. Astron. Astrophys. 1977, 59, 79–89. [Google Scholar]
- Papadakis, K.E.; Zagouras, C.G. Bifurcation points and intersections of families of periodic orbits in the three-dimensional restricted three-body problem. Astrophys. Space Sci. 1993, 199, 241–256. [Google Scholar] [CrossRef]
- Kalantonis, V.S. Numerical Investigation for Periodic Orbits in the Hill Three-Body Problem. Universe 2020, 6, 72. [Google Scholar] [CrossRef]
- Karydis, D.; Voyatzis, G.; Tsiganis, K. A continuation approach for computing periodic orbits around irregular-shaped asteroids. An application to 433 Eros. Adv. Space Res. 2021, 68, 4418–4433. [Google Scholar] [CrossRef]
- Jiang, Y.; Baoyin, H. Orbital Mechanics near a Rotating Asteroid. J. Astrophys. Astron. 2014, 35, 17–38. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, Y.; Gong, S. Analysis of the Potential Field and Equilibrium Points of Irregular-shaped Minor Celestial Bodies. Astrophys. Space Sci. 2014, 353, 105–121. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y. Equilibrium Points and Periodic Orbits in the Vicinity of Asteroids with an Application to 216 Kleopatra. Earth Moon Planets 2015, 115, 31–44. [Google Scholar] [CrossRef]
- Nolan, M.C.; Magri, C.; Howell, E.S.; Benner, L.; Giorgini, J.D.; Hergenrother, C.W.; Hudson, R.S.; Lauretta, D.S.; Margot, J.L.; Ostro, S.J. Shape model and surface properties of the OSIRIS-REx target Asteroid (101955) Bennu from radar and lightcurve observations. Icarus 2013, 226, 629–640. [Google Scholar] [CrossRef] [Green Version]
- Keller, H.U.; Barbieri, C.; Koschny, D.; Lamy, P.; Vernazza, P. E-type asteroid (2867) Steins as imaged by OSIRIS on board Rosetta. Science 2010, 327, 190–193. [Google Scholar] [CrossRef]
- Jorda, L.; Lamy, P.L.; Gaskell, R.W.; Kaasalainen, M.; Groussin, O.; Besse, S.; Faury, G. Asteroid (2867) Steins: Shape, topography and global physical properties from OSIRIS observations. Icarus 2012, 221, 1089–1100. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equilibrium Points | Periodic Orbits Near Equilibria | ||
|---|---|---|---|
| Topological Cases | Eigenvalues | (A, B) | Topological Cases |
| case 1 | region VII | P2 | |
| case 2 | region III and V | P4 | |
| case 3 | region II and IV | P3 | |
| case 4a | — | — | |
| case 4b | — | — | |
| case 5 | region I | P1 | |
| Ranges of (A, B) | Locations of (A, B) | Characteristic Multipliers | Topological Cases |
|---|---|---|---|
| region I | 1(multiplicity 2), | P1 | |
| region II, IV and VI | 1(multiplicity 2), | P3 | |
| region III and V | 1(multiplicity 2), , | P4 | |
| region VII | 1(multiplicity2), | P2 | |
| common boundaries of region I and II, VI and I | 1(multiplicity 2), (multiplicity 2, ), (multiplicity 2) | PDRS1 | |
| common boundaries of region II and III, IV and V | 1(multiplicity 2), −1(multiplicity 2), | PPD4 | |
| common boundary of region III and IV, V and VI | 1(multiplicity 4), | P6 | |
| common boundary of region VII and I | 1(multiplicity 2), (multiplicity 2, ), (multiplicity 2) | PK1 | |
| common boundary of region VII and III | 1(multiplicity 2), −1(multiplicity 2), | PPD3 | |
| common boundary of region VII and V | 1(multiplicity 4), | P5 | |
| point P | 1(multiplicity 2), −1(multiplicity 4) | PPD2 | |
| point R | 1(multiplicity 4), −1(multiplicity 2) | PPD1 | |
| point Q (6, 15) | 1(multiplicity 6) | P7 |
| Variation Paths of Parameters (A, B) | Bifurcation Types |
|---|---|
| region I—boundary of I and II—region II, | |
| region VI—boundary of VI and I—region I | real saddle bifurcation |
| region II—boundary of II and III—region III, | |
| region IV—boundary of IV and V—region V, | |
| region VII—point P—region II, | |
| region VII—boundary of VII and III—region III, | |
| region I—point P—region III | doubling period bifurcation |
| region III—boundary of III and IV—region IV, | |
| region V—boundary of V and VI—region VI, | |
| region VII—boundary of VII and V—region V, | |
| region VII—point Q—region VI, | |
| region I—point Q—region V | tangent bifurcation |
| region VII—boundary of VII and I—region I | Neimark–Sacker bifurcation |
| region III—point R—region V, | |
| region VII—point R—region IV | doubling period bifurcation and tangent bifurcation |
| Periodic Orbit Family | Normalized Period | Initial Position | Initial Velocity |
|---|---|---|---|
| V1 | 0.802960550501 | [0.533051574923, 0.0308716077095, 0.0164503086145] | [−0.0200789540464, −0.884496167760 , 0.649048914541 ] |
| V2 | 1.98267008174 | [0.767915266773, 0.196758690452, −0.158788006313] | [0.995558894975, −2.63610169181, 1.28273214591] |
| V3 | 0.951842774046 | [0.866022473874, −0.0683721279246, −0.137217733554] | [0.245898975991, 0.141474174266, 0.761661775539] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Jiang, Y.; Li, H. Bifurcations of Periodic Orbits in the Gravitational Field of Irregular Bodies: Applications to Bennu and Steins. Aerospace 2022, 9, 151. https://doi.org/10.3390/aerospace9030151
Liu Y, Jiang Y, Li H. Bifurcations of Periodic Orbits in the Gravitational Field of Irregular Bodies: Applications to Bennu and Steins. Aerospace. 2022; 9(3):151. https://doi.org/10.3390/aerospace9030151
Chicago/Turabian StyleLiu, Yongjie, Yu Jiang, and Hengnian Li. 2022. "Bifurcations of Periodic Orbits in the Gravitational Field of Irregular Bodies: Applications to Bennu and Steins" Aerospace 9, no. 3: 151. https://doi.org/10.3390/aerospace9030151
APA StyleLiu, Y., Jiang, Y., & Li, H. (2022). Bifurcations of Periodic Orbits in the Gravitational Field of Irregular Bodies: Applications to Bennu and Steins. Aerospace, 9(3), 151. https://doi.org/10.3390/aerospace9030151