1. Introduction
Small satellites are becoming increasingly recognized internationally for their cost-effectiveness as tools for a wide range of on-orbit missions [
1]. Thus, the space administrations and governments of some countries have been actively developing small satellite technology for more on-orbit missions in recent decades [
2,
3,
4,
5]. The rise of on-orbit scientific missions has led to an increased need for ground-based experiments that are designed to improve the traditionally low success rate of on-orbit missions [
6]. Therefore, the demand for a higher success rate depends on the motion system reliability and autonomy performance which are limited by some critical subsystems, such as attitude- and position-control systems (APCS). Currently, performance tests are the primary method of determining key parameters and their relationships to APCS, which is one of the essential measures that can improve the technical level of APCS and is critical to its design and use.
The Spacecraft On-orbit Operation Simulation Testbed (SOOST) at the State Key Laboratory of Mechanics and Control of Mechanical Structures (SKLMCMS) of Nanjing University of Aeronautics and Astronautics (NUAA) was originally developed to simulate and test the dynamics and control of tethered satellites. Researchers at SKLMCMS have extended the design of the testbed to account for small satellites with different functions. SOOST has been in operation and is constantly being upgraded, with four generations of spacecraft simulators having been developed over the past decade. Each simulator generation is designed with a different mission. The first-generation simulator was developed to simulate the deployment and retrieval control of tethered satellite systems, which could weigh more than 80 kg and has a diameter of 0.62 m [
7,
8]. The second-generation simulators used proportional electromagnetic valves with pressure feedback to enable position control and used momentum wheels to adjust their attitudes [
9]. Additionally, each second-generation simulator decreased the mass to 12 kg with a 0.2 m diameter. Third-generation simulators achieved better reliability, maintainability, and usability by markedly simplifying the hardware system structure compared to second-generation simulators [
10]. In this study, fourth-generation simulators were used to design a complete mechanical structure with a series of standardized expansion interfaces by taking advantage of both aluminum constructions and polycarbonate structures. More importantly, a real-time embedded system was used to replace the onboard software using the Windows operating system.
Several new simulation scenarios have been verified in the proposed SOOST in the last five years, such as on-orbit assembly, satellite formation flying, and spacecraft docking [
11,
12,
13,
14]. To improve APCS reliability and the performance of the spacecraft simulator, a modular design method was used to support a variety of configurations and capabilities in previous studies [
15,
16]. The SOOST serves as an effective platform to simulate a microgravity orbital environment, although it comes with the disadvantages of scaling down and reducing problem complexity. However, this design still allows research to be performed in a high-fidelity environment that could achieve real-time data computational demands and help to validate the APCS technologies of the spacecraft simulator. Then, a high-quality testing environment with measured characterization data facilitated the performance assessments of the APCS system and direct comparisons with the results from past projects or characterizations. Additionally, each project can leverage the system and process refinements of the testbed as well as its repository of institutional knowledge to ensure that best practices from past research are used and refined over time. Despite some disadvantages that are associated with those technologies, the SOOST can still be used to validate APCS technologies and hardware capabilities such as sensors, actuators, processing units, telecommunication devices, etc.
The SOOST in the NUAA primarily includes a granite air-bearing testbed and spacecraft simulators. Spacecraft simulators are used for ground-based experiments that simulate satellite dynamics and kinematics in various scenarios. The granite testbed here provides a frictionless surface for all spacecraft simulators, allowing the actuators to affect the relevant dynamic changes in two translational DOFs as well as one rotational degree. In the test environment, spacecraft simulators are levitated on a granite table using carbon dioxide (CO2).
In the last five years, nearly all planar air-bearing testbeds have implemented position control using a set of thrusters, and some have augmented their planar testbeds with a full suite of inertial sensors for navigation [
17,
18,
19,
20,
21,
22,
23,
24]. Based on previous studies, the SOOST was recently equipped with an onboard RGB-D camera that facilitates autonomous navigation under floating conditions without an external visual system. The system can then markedly widen its potential applications to simulate small satellite missions due to its enhanced locomotion and autonomy. To design and evaluate control algorithms for spacecraft close-proximity operations or derive the expected performance for on-orbit systems based on ground testbed results, knowledge of the testbed characteristics is required. The primary purpose of this study is to determine the full set of relevant performance metrics derived from a series of systematic characterization tests, such as the force properties produced by the thruster under simulated floating. In addition, for useful comparisons with similar devices at different labs globally, this article presents a comprehensive description of the relevant performance metrics, uncertainties, and related methodologies. For example, the gas consumption and force produced by the actuator are discussed. This paper also investigates the ability of other similar planar air-bearing devices to replicate the process to evaluate the metrics of their testbeds.
As a typically active three-DOF planar testbed [
21], the SOOST is equipped with arrays of cold gas thrusters and an embedded system is used to control the thrusters and onboard sensors. Currently, many similar active three-DOF planar testbeds exist globally. The Small Satellite Dynamics Testbed (SSDT) at Jet Propulsion Laboratory (JPL), is distinguished by its emphasis on traceability during flight and its new thruster system [
21,
22]. However, there are some errors related to manual operations in the characterization tests that identified key parameters of the SSDT platform, such as variations in the differences in the manual reading of the analog pressure gauge in the single-thruster air consumption test [
21]. The Proximity Operation of Spacecraft: Experimental Hardware-in-the-Loop Dynamic simulator (POSEIDYN) developed by the Naval Postgraduate School (NPS) aims to provide a representative system-level testbed upon which to develop, experimentally test, and partially validate control algorithms for rendezvous and proximity operations [
17,
18,
25,
26]. However, the performance of the thrusters is characterized by the assumption that the measured force has an equal contribution from any two thrusters in the POSEIDYN. The Kinesthetic Node and Autonomous Table-Top Emulator (KNATTE) developed by Lulea University of Technology (LTU) intends to create a corpus of tests to determine dynamic behavior in a frictionless simulation [
23]. Because pressure consistency is not considered in the experimental tests for measuring the thruster forces, the average value differs markedly from thruster to thruster. Other similar testbeds, such as Orbital Robotic Interaction, On-orbit servicing, Navigation (ORION) [
24], the Platform Integrating Navigation and Orbital Control Capabilities Hosting Intelligence Onboard (PINOCCHIO) [
19,
20,
27,
28], the Synchronized Position Hold Engage and Reorient Experimental Satellites (SPHERES) [
29,
30], and Complex for Satellites Motion Simulation (COSMOS) [
31], do not provide a detailed characterization of their testbeds for systematic test approaches.
Thus, the SOOST is characterized by user-customizable, systematic test means, a detailed characterization of the system, its relatively complete sensor system, a lower system latency, and its modular design that supports a wide variety of applications. For example, a user can choose the force magnitude produced by thrusters based on a real payload mass or other requirements. From an experimental standpoint, the SOOST planar system offers great flexibility and independence by the adoption of an onboard CO2 tank and battery.
This paper is organized as follows.
Section 2 provides a detailed description of the design of the SOOST’s hardware architecture, including the mechanical subsystem, the electric subsystem, and the pneumatic subsystem. In
Section 3, the testbed system software architecture is discussed in detail.
Section 4 presents the performance characterization testing conducted in the SOOST and the resulting relevant performance data as a basis for systematic comparisons with other similar testbeds and research. Two typical case studies are completed to assess the capabilities of the SOOST in
Section 5. Finally,
Section 6 provides conclusions and future study directions of this field of research.
2. Hardware Architecture of Testbed System
This section presents a detailed description of the hardware architecture of the SOOST, with an emphasis on the pneumatic subsystem. The pneumatic subsystem is designed to acquire two critical capabilities to create an almost frictionless environment and supply the actuators to achieve position control. Even though there are many similar studies in the literature, the design concept provided in this section is focused on the practicality principle of the devices.
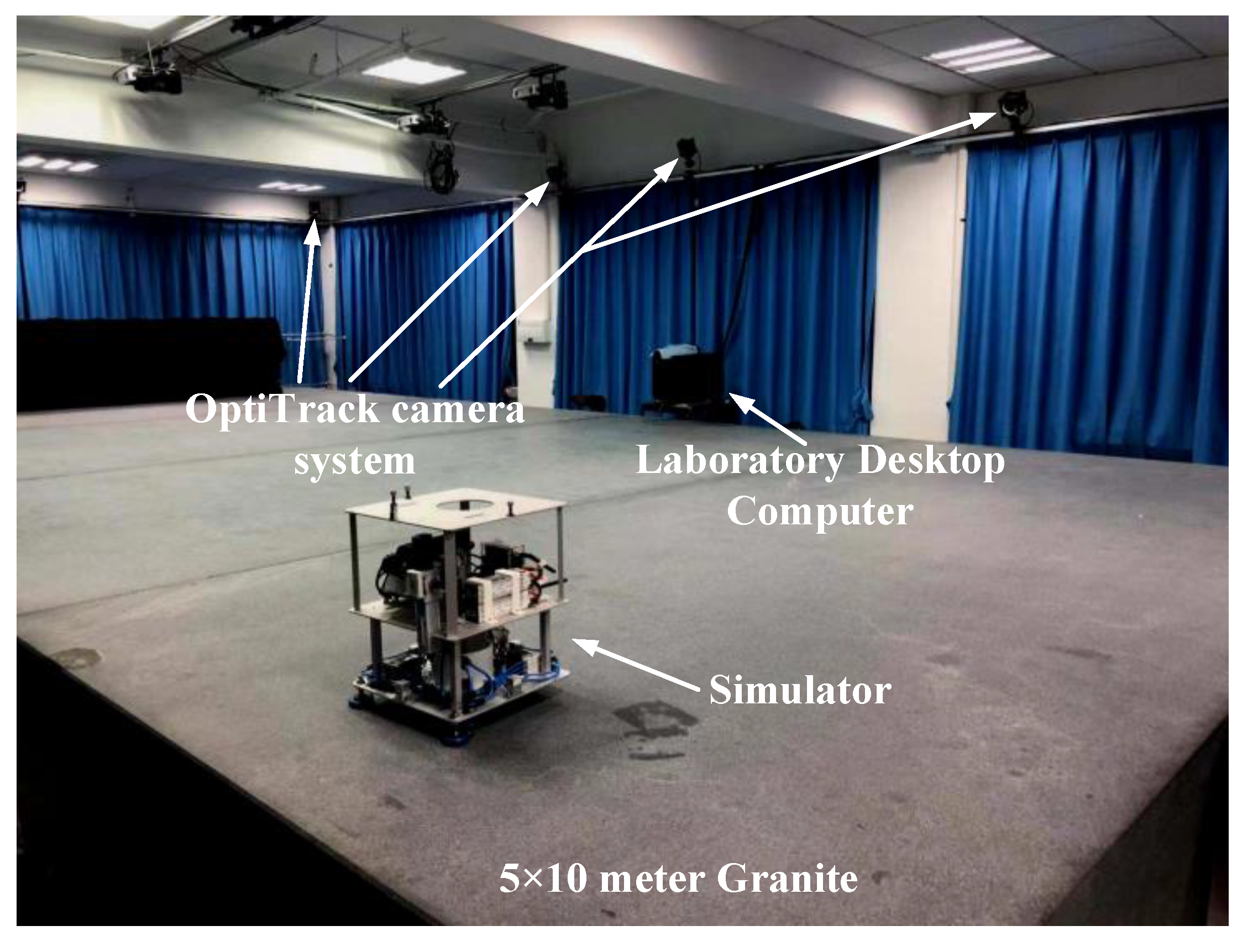
2.1. Hardware Overview
The SOOST planar testbed system is composed of the following three primary elements: a 5 × 10 m
2 granite platform, multiple spacecraft simulators, and a laboratory-scale motion capture system (OptiTrack camera system). An overview of each of these elements is shown in
Figure 1.
The entire 5 × 10 m2 granite platform is made of four smaller pieces of 5 × 2.5 m2 granite. Every small piece of granite is supported by a set of adjustable pedestals that allow the granite surface to be horizontally leveled to an accuracy of 0.005 deg. The subsided foundations and some building structural activities could cause the entire granite surface to tilt over time; thus, periodic measurements are required to ensure that the surface is level to within the preset tolerance.
Spacecraft simulators are custom-designed vehicles that simulate spacecraft orbital dynamics. In this study, fourth-generation spacecraft simulators are used. An almost frictionless and microgravity environment is established using the gas discharged from three flat 50-mm-diameter air bearings to generate an approximately 5 μm thick air film between the granite surface and the spacecraft simulator. The air film acts as a lubricant film, which eliminates direct contact between the granite surface and the simulator. Therefore, the planar motion simulates flight-like dynamic behaviors. Compared with the 6-DOF motion of an on-orbit spacecraft, the SOOST only allows 3-DOF motion (two translations and one rotation), which is a critical physical limitation of the testbed. However, the testbed can still simulate many important functions in space system development in many situations and is intuitive to use.
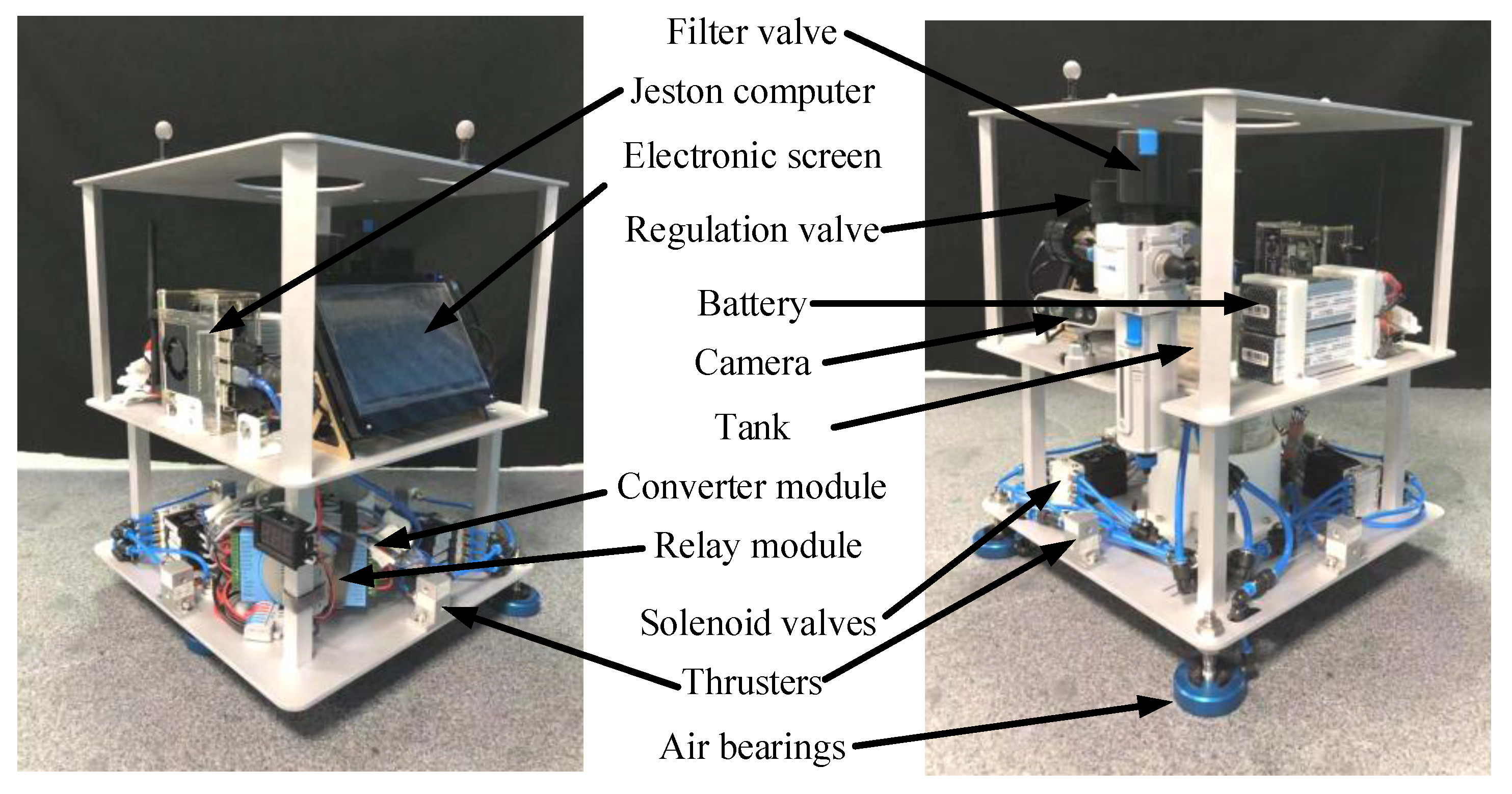
As shown in
Figure 2, the simulator primarily consists of four subsystems which are as follows: the mechanical subsystem, the electronic subsystem, the pneumatic subsystem, and the payload subsystem. First, the mechanical subsystem rigidly supports all subassemblies together using custom-designed aluminum plates and polycarbonate fasteners. Then, from top to bottom, the electronic subsystem contains an embedded computer, a power supply, an electronic screen, a wireless communication module, a serial converter module, and a relay module. Third, the pneumatic subsystem is primarily composed of a CO
2 tank, a pressure regulation valve, a filter valve, eight solenoid valves, eight thrusters, and three air bearings. Finally, the payload subsystem is an optional subsystem that may include additional sensors (e.g., IMUs), an RGB-D camera, additional actuators (e.g., reaction wheels), or special equipment (e.g., robotic manipulators, docking mechanisms).
In different simulated missions, the simulator is configured to include all required subsystems while removing unrequired subassemblies so as to reduce mass. Thus, the mass and inertia of the system vary with different test campaigns. When the payload subsystem is not considered, the mass of the system ranges from approximately 9.6 kg to 10.4 kg, the inertia perpendicular to the surface is approximately 0.1445 kg·m
2, and the center of mass tends to be located within 6 mm of the geometric center on the surface. A more detailed description of this configuration is provided in
Section 4.
The SOOST’s laboratory-scale motion capture system is a commercial system (OptiTrack) that includes eight PrimeX 41 cameras, four PrimeX 22 cameras, and an external computer. The field of view of the motion capture system covers the entire granite surface. Additionally, the OptiTrack camera system can provide better performance for three-dimensional reconstruction in real-time. Additionally, this system can measure the position and orientation of the simulator, which carries passive fluorescent markers with a submillimeter-level accuracy at rates of up to 300 Hz.
2.2. Mechanical Subsystem
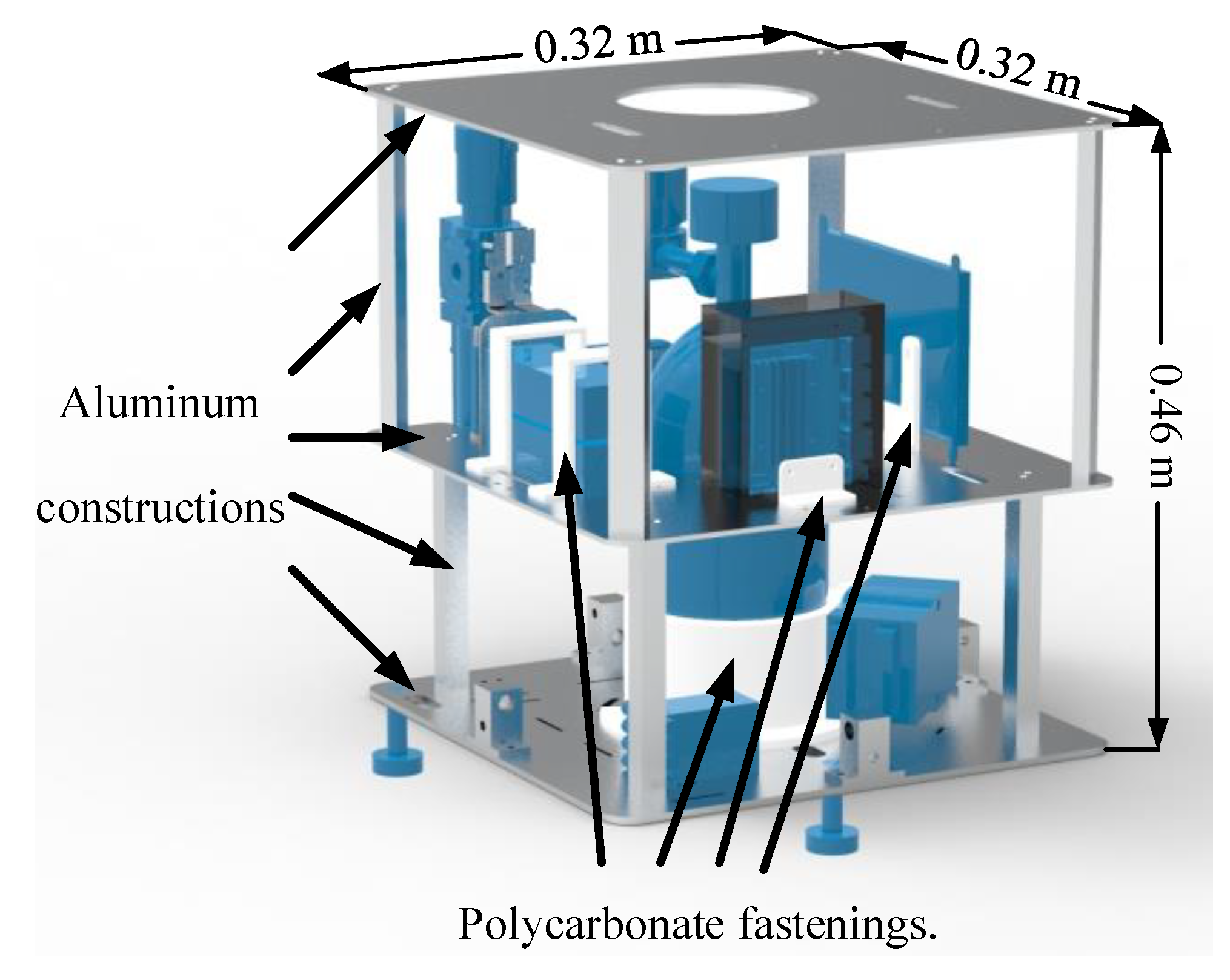
The mechanical subsystem rigidly supports all subassemblies together by taking advantage of both aluminum constructions and polycarbonate structures. The entire structure is a 0.32 × 0.32 × 0.46 m container framework, as shown in
Figure 3, which primarily includes three aluminum plates, eight aluminum columns, and some polycarbonate fastenings. The benefit of this system is that it successfully combines the high strength of aluminum and the low mass of polycarbonate. The three aluminum plates provide many attachment points to attach nearly all separate components. Two levels are divided by the three aluminum plates. The level closest to the granite surface holds most of the pneumatic components and a smaller portion of the electronic components, and the upper level is the opposite. The tank crosses through both volumes because the CO
2 tank must be upright to avoid self-freezing when exhausting. For the convenience of CO
2 tank installation and uninstallation, a circular hole in the roof of the framework is drilled. The payload subsystem could be installed above the framework for dedicated scenarios, and the structure can also expand vertically to obtain additional space if necessary. Additionally, some appendages, such as docking mechanisms and flexible antenna systems, could be attached to the side of the framework using appropriate mounting holes and fastenings.
2.3. Electronic Subsystem
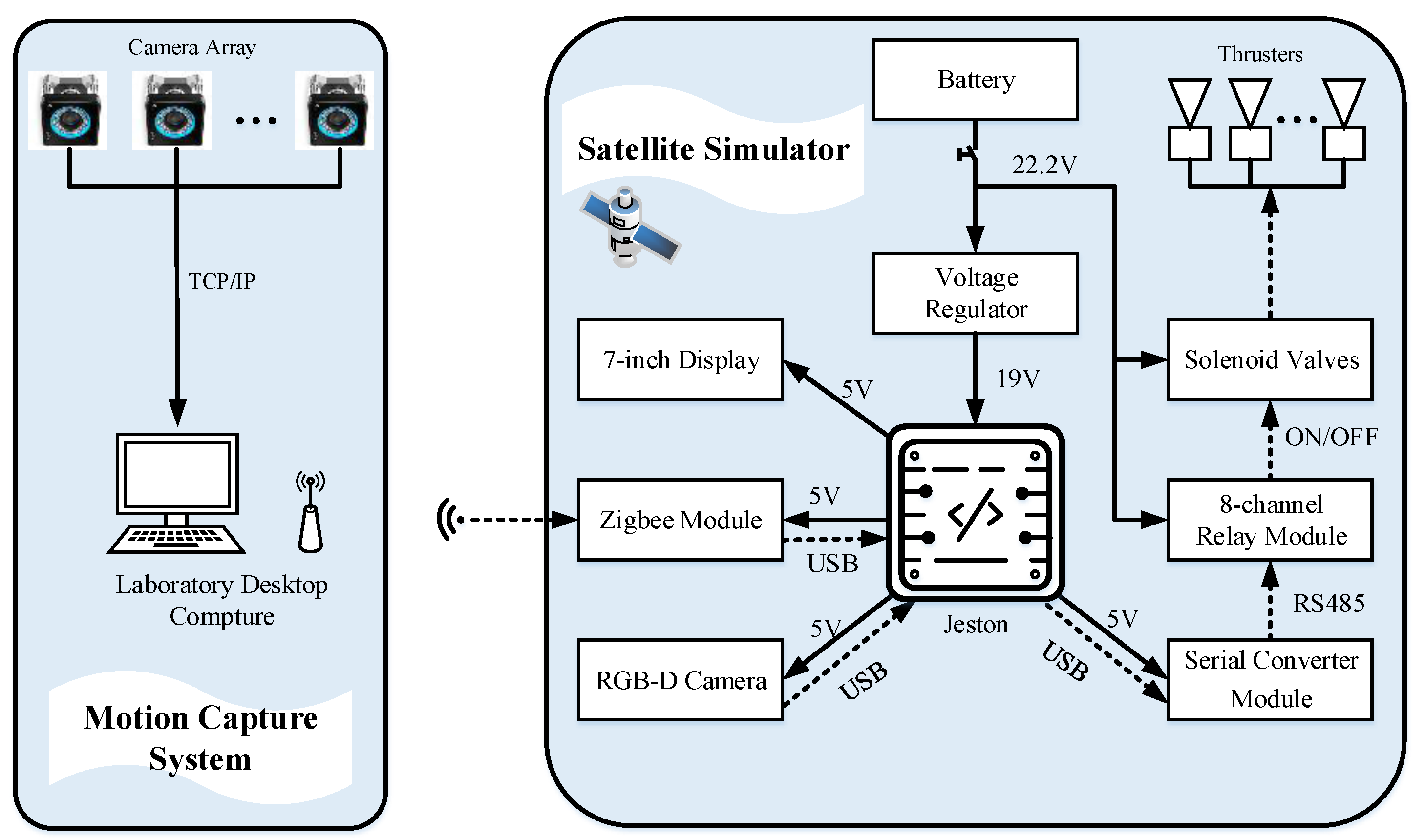
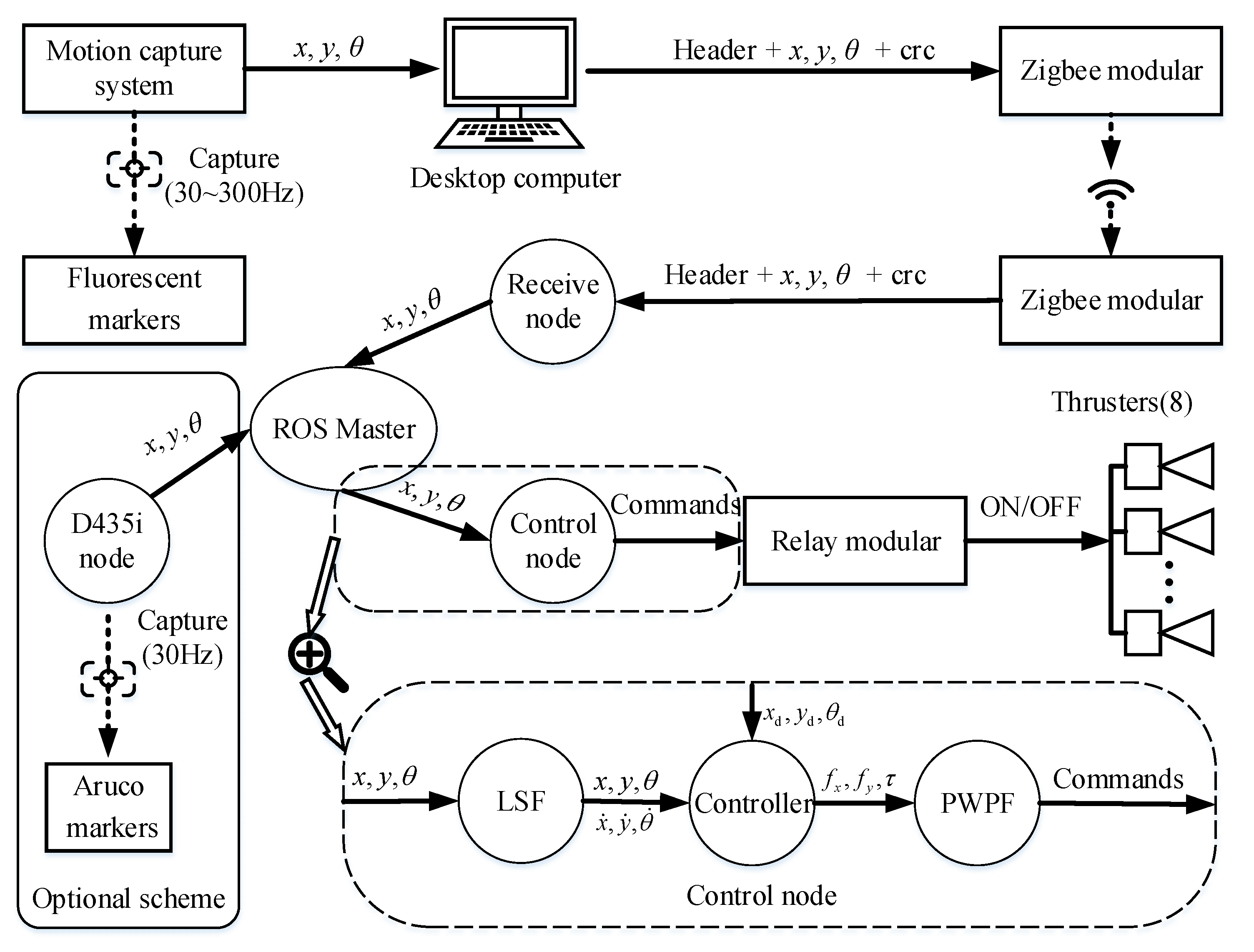
The electronic subsystem is designed to provide a power supply, data processing, and data transmission. The entire electronic subsystem is powered by a power supply system that consists of two 22.2 V Li-Po batteries and a DC voltage regulator. The power supply system has a capacity of 6400 mAh, and the voltage regulator can deliver a steady predictable current through its 19 V output. The core of the electronic subsystem is an onboard Jeston Xavier NX computer running Ubuntu 18.04 LTS, which receives data from sensors and sends the appropriate commands to the actuators. In addition, based on 384 NVIDIA CUDA® Cores, 48 Tensor Cores, 6 Carmel ARM CPUs, and two NVIDIA Deep Learning Accelerators engines, the Jeston Xavier NX provides all of the onboard computational capabilities of the spacecraft simulator.
The Jeston Xavier NX is equipped with four USB 3.0 ports that are occupied by other key electronic components. The first port is occupied by a 7-inch display screen to help to easily debug programs and display the system status. The second USB interface connects a serial converter module to provide one additional high-speed RS-485 port. Then, to ensure that timings are uniform between thrusters when opening or closing more than one thruster at a time, the RS-485 port can communicate with a relay module, which has eight channels to provide the required switching capability for all eight thrusters. Thrusters are opened or closed by the corresponding solenoid valves via the RS-485 port, and the status of each thruster is independently controlled by the Jeston computer. All eight solenoid valves are also powered directly from the power supply system. According to the datasheet, the switching time-on and -off times of the solenoid valve in the new condition are 0.8 ms and 0.4 ms, respectively. Additionally, the typical relay on time and the typical relay off time of the relay module are 3 ms and 4 ms, respectively, according to the product manual. The third USB port is used to communicate with a D435i camera, which combines the robust depth-sensing capabilities of a D435 with the addition of an inertial measurement unit (IMU). The last USB port is connected to a ZigBee wireless communication module, which enables the simulator to communicate with other simulators or the external desktop computer. Compared to the Wi-Fi module used by Ref. [
32], the ZigBee module has a lower power consumption and requires a smaller battery capacity, yielding longer use.
The electrical supply and signal block diagram of the testbed is shown in
Figure 4, and the electrical properties of the key components are shown in
Table 1. Data transmission is denoted with broken lines in
Figure 4. Under normal conditions, the power supply system can power the simulator for over 3 h; thus, the amount of CO
2 inside the onboard tank is the primary limiting factor during various tests.
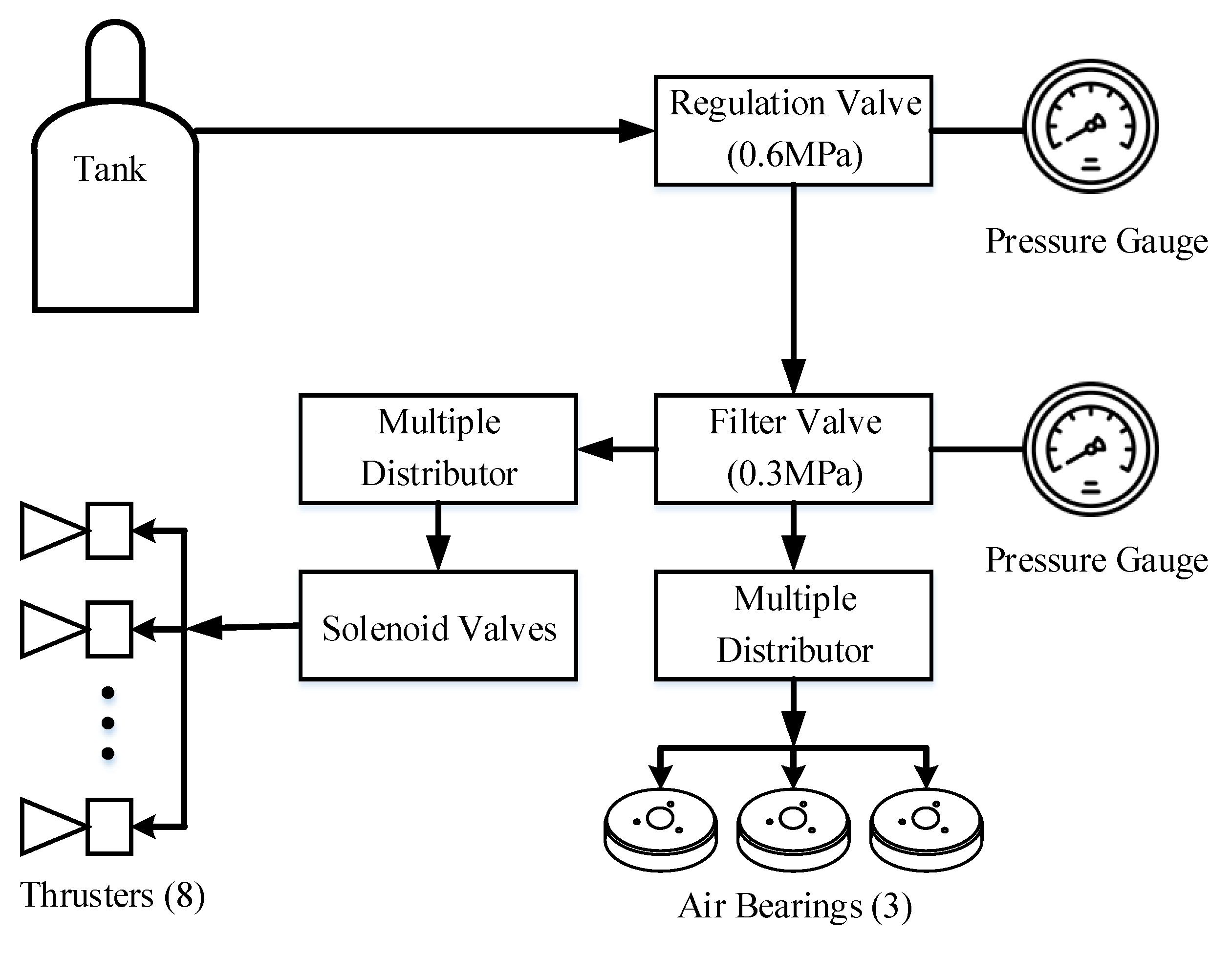
2.4. Pneumatic Subsystem
The pneumatic subsystem plays a critical role in the entire system, and its primary function is to provide the gas supply to the thrusters and the air bearings of the simulator. Due to safety reasons and the high cost of high-pressure gas canisters, CO
2 is used in this pneumatic subsystem [
33]. The pneumatic subsystem diagram is shown in
Figure 5, and its relevant properties are listed in
Table 2. A 1.1 L tank can typically store 0.8 kg of CO
2 at room temperature and can be disassembled to check the remaining gas supply due to the special structural design. The nominal pressure of the tank is approximately 7 MPa. After flowing through the pressure regulation valve, the CO
2 pressure markedly decreases to 0.6 MPa, but the pressure here becomes unstable when switching the thrusters on or off. Thus, a filter valve is used to stabilize the pressure and prevent impurities in the CO
2 from damaging the delicate air-bearing porous material. Then, the CO
2 is divided into two pipes with the same pressure which can be regulated as follows: one pipe is directly connected to the three air bearings to lift the simulator and make it float above the granite surface using three air bearings that are mounted to the bottom of the simulator in an equilateral distribution; and another pipe travels through the solenoid valves to supply the thrusters.
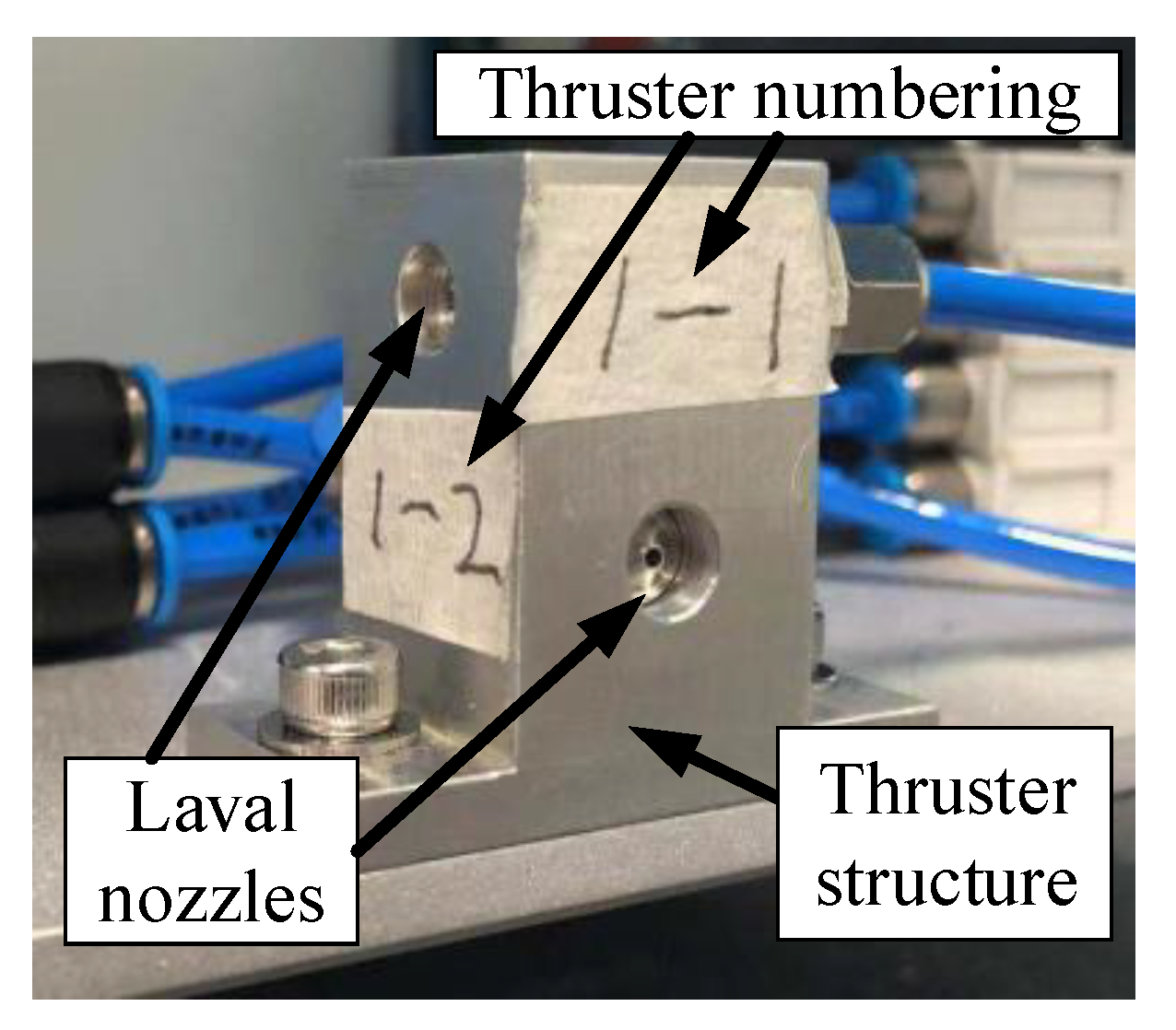
These thrusters could be divided into two parts (four normal cases and four tangential cases) to control positive and negative translations in the
-body and
-body axes, and the rotation about the
-body axis, respectively. Each thruster structure is allocated at the edges of the simulator, which is composed of one normal case and one tangential case. As shown in
Figure 6, two Laval nozzles [
34,
35] are embedded into one thruster structure.
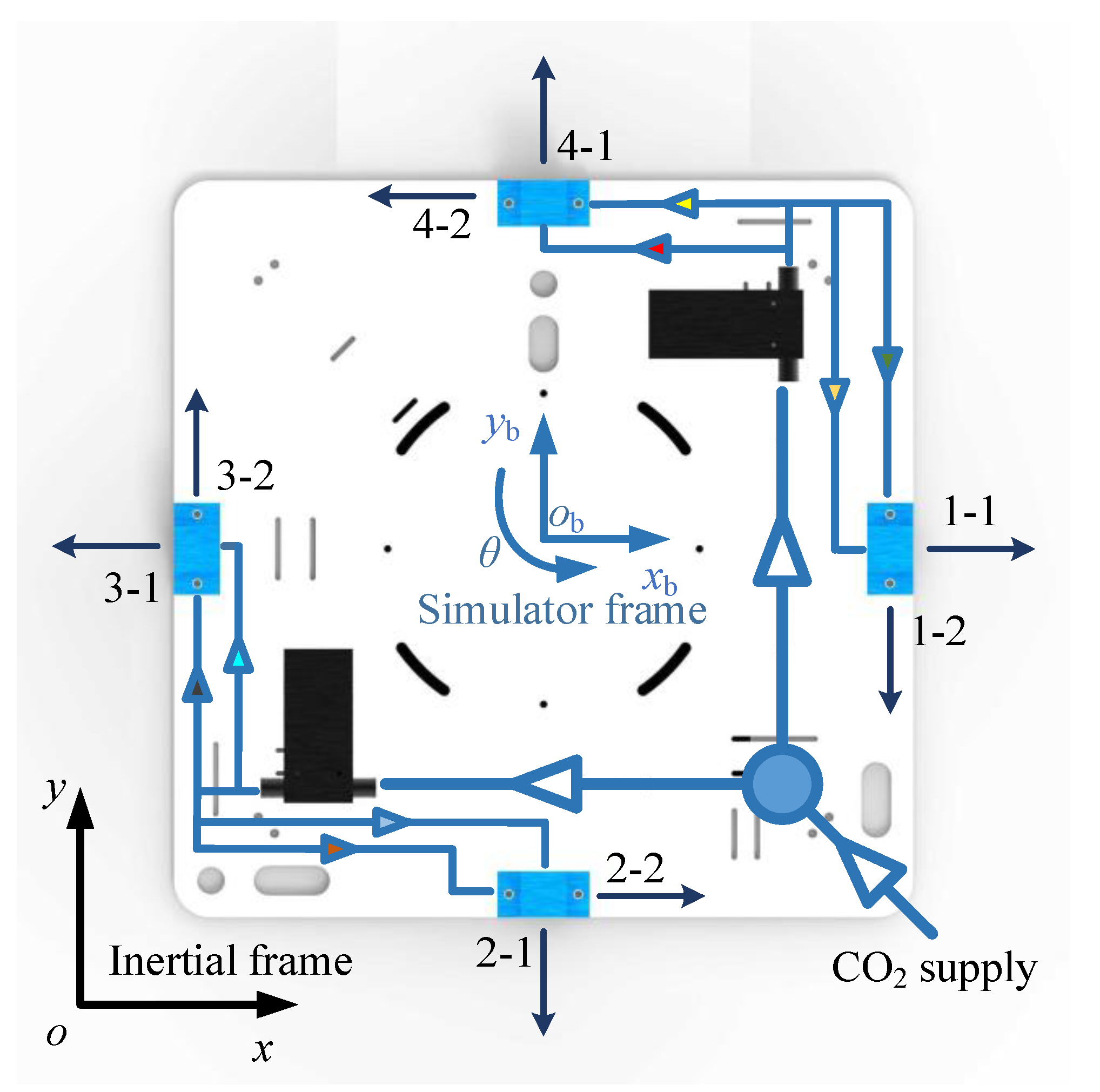
Figure 7 shows the thruster numbering convention used by the control law, where the coordinate systems of the simulator and inertial frames are defined, and the directions of the exhausted forces are represented by arrows.
4. Testbed System Characterization
This section describes the characterization of the SOOST planar testbed and primarily focuses on the center of mass, single-thruster force, multiple-thruster force, the moment of inertia, float duration, single-thruster CO2 consumption, multiple-thruster CO2 consumption, and system latency. A series of tests were then performed to describe these characteristics under different testing conditions, principally the pressure of the supply CO2. Test data can be used for a systematic comparison of the capabilities of this testbed system with other similar systems, or as a reference when building future testbed systems.
4.1. Center of Mass
The center of mass of the simulator is a critical physical property for understanding the system dynamics.
As shown in
Figure 7, the origin of the testbed is defined as the center of the plate. To meet the configuration needs of the thrusters, the center of mass must coincide with the geometric center of the simulator to the greatest extent possible. Thus, the following three principles should be followed during installation: (1) all components must try to be mounted symmetrically to the geometric center; (2) some loosely secured components, such as wires and connectors, must be bolted rigidly to the mainframe to avoid additional uncertainty; and (3) heavier objects should be installed near the geometric center. For example, the CO
2 tank should be positioned at the simulator center to avoid centroid offset caused by gas consumption as much as possible.
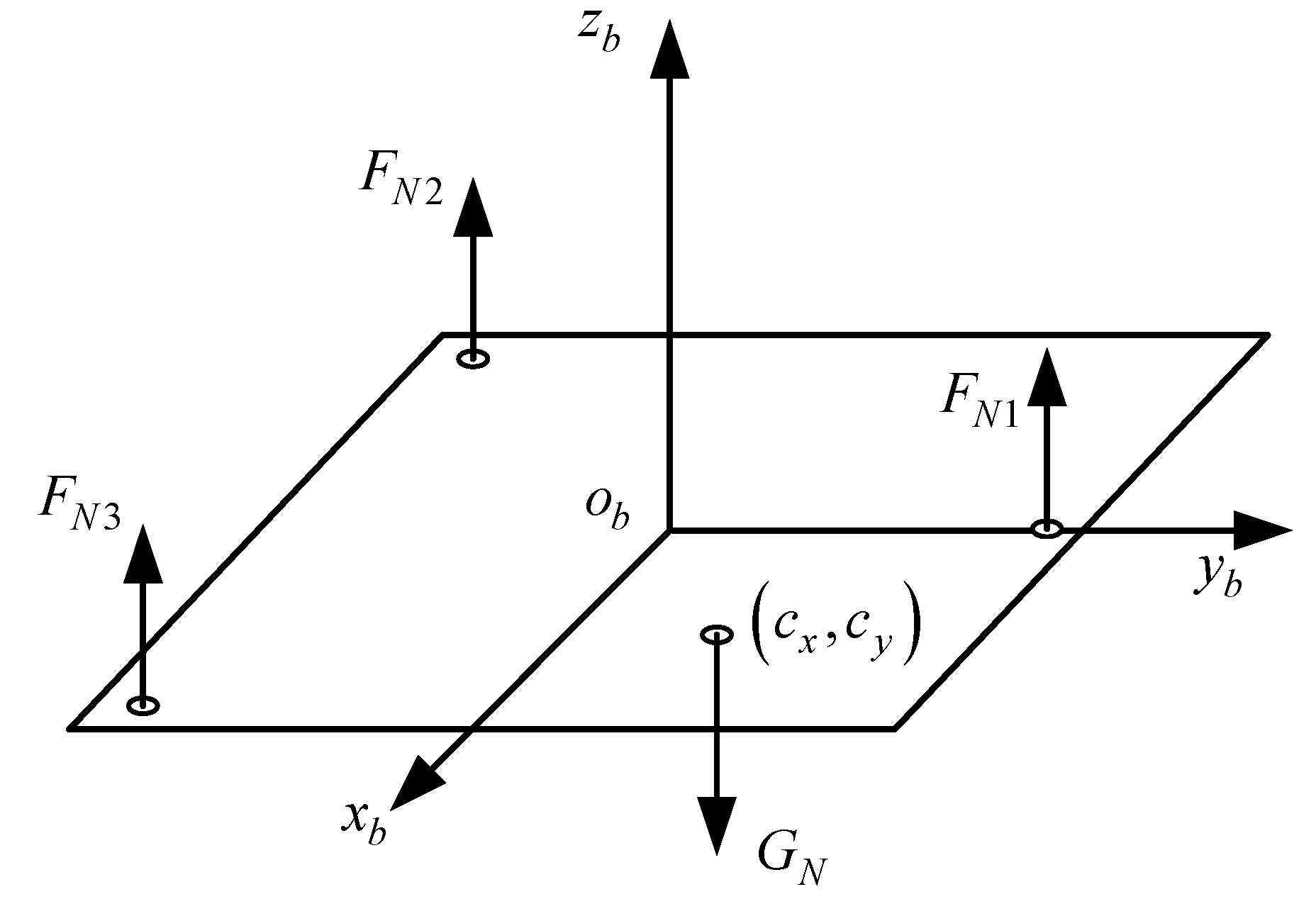
Because the simulator has an uneven mass distribution, the following multipoint support method is designed to find the centroid in the plane. As shown in
Figure 11, three air bearings at the bottom of the simulator are considered to be the supporting points. Three reaction forces
are measured with three electronic balances concurrently. The centroid
can be obtained by the following moment balance equation
where
is the total mass of the simulator, which can be calculated with the following formula
The calculated centroid is shown in
Table 3, and the results show that the changing scope of the centroid is small as the CO
2 mass in the tank increases. The error between the real centroid and the geometric center is within an acceptable range.
4.2. Single Thruster Force and Consumption
The performance of the thrusters determines the several important indications of the simulator, which include accurate modeling in the numerical simulation, the control input, and the moment of inertia estimation. Drilled-bolt nozzles have typically been used in recent studies [
21,
23], but their machining accuracy has a considerable effect on thruster performance. Even with the commercial Laval nozzles used in this paper, it is still necessary to characterize all thrusters separately.
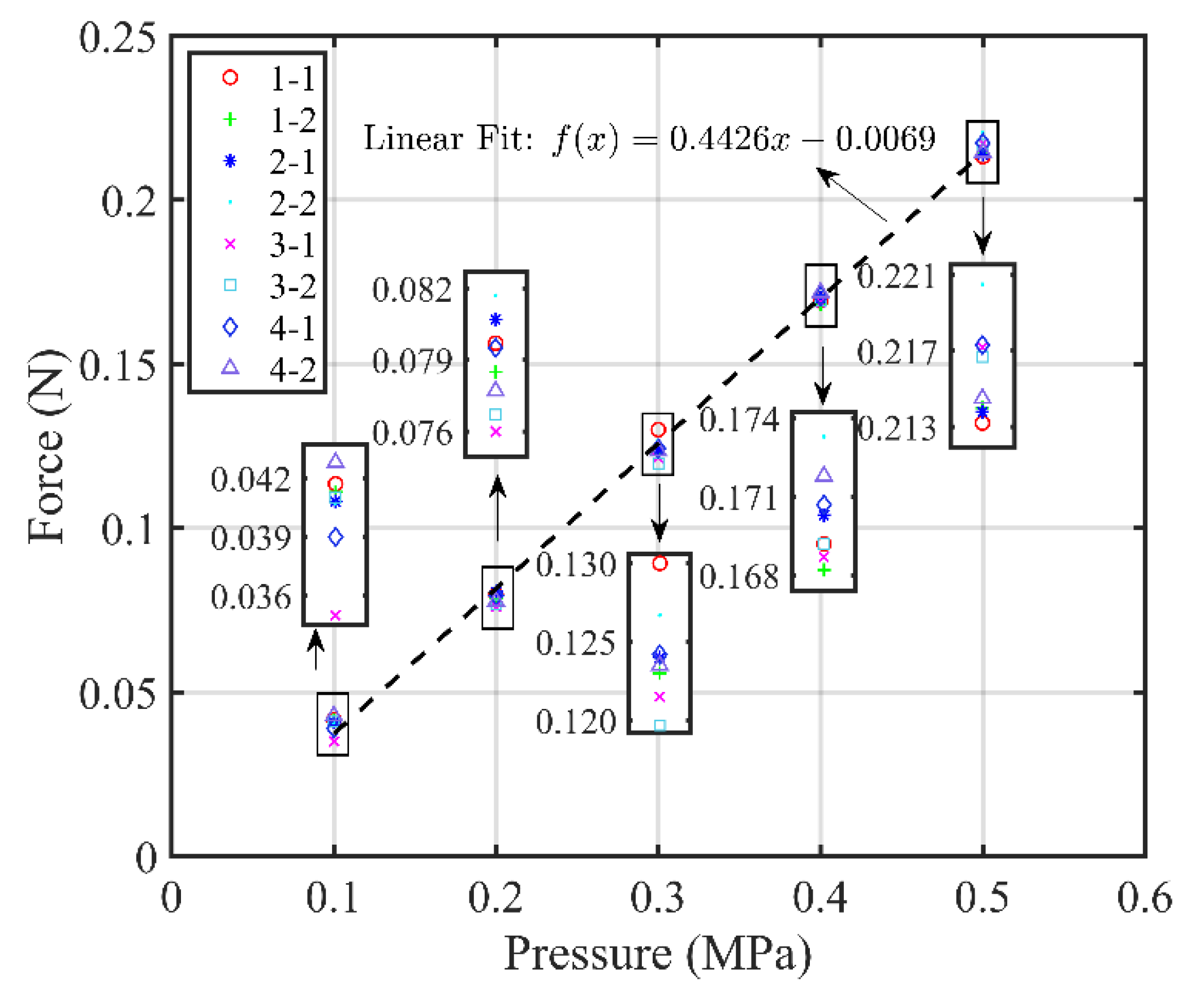
Because the thruster force is strongly affected by the pressure regulator setting, the nominal performance of a single thruster must be characterized at different CO
2 pressures. Then, a load cell is used to measure the maximum force produced by the thruster. To ensure the reliability and repeatability of the results, six tests are repeated at a given operating pressure for each thruster. A resolution of 0.001 N is used to measure forces due to instabilities, even though the load cell has a higher resolution. The results are shown in
Figure 12, which shows that there are small differences between each thruster at the same pressure, thereby verifying that each thruster has an equal contribution to the produced force.
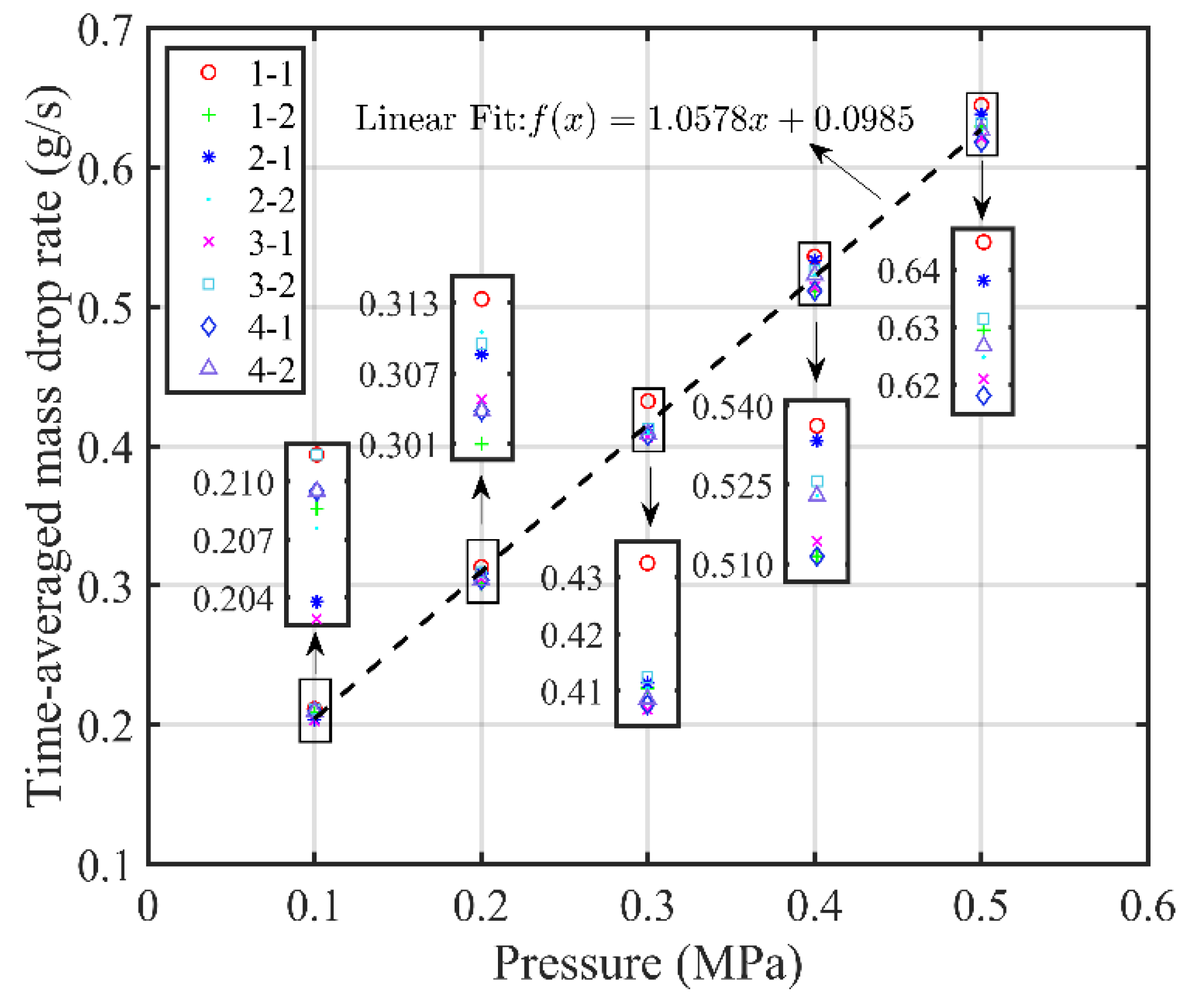
A single thruster was fired during a given time interval (5 s, 10 s, and until 30 s) to measure CO
2 consumption. To diminish man-made measurement errors, each operation time interval was controlled by the ROS timer, which was also used in the later consumption experiments. Unlike compressed air, the outlet pressure of the CO
2 tank was found to be relatively stable within a certain range. Thus, the single thruster consumption and the single thruster force could be measured concurrently. Consumption was then recorded using an electronic balance with a resolution of 0.1 g. Note that the supply to the air bearings was closed in the above test. CO
2 consumption is shown in
Figure 13. There are some small variations in the mass drop between each thruster, which could be attributed to assembly errors, manual reading errors, or ice caused by CO
2 emissions.
Finally, much more concise results are provided in
Table 4. The measurement biases from these tests are small. With the augmentation of the supply pressure, the measured force and consumption rate increased accordingly, and the relation was nearly linear under the experimental conditions. Thus, each thruster likely provides an equal contribution to the force produced and gas consumed.
4.3. Multiple Thrusters Force and Consumption
When the simulator is used in a simulation, two, three, or four thrusters are typically enabled concurrently. Thus, it is necessary to perform multiple thruster force and consumption tests. Similar to the previous section, the multiple thruster tests were conducted identically to the single thruster tests, with the exception that multiple thrusters are activated concurrently. Due to the eight-channel relay module, multiple thrusters could be simultaneously opened (or closed) using one line of command code, which facilitates the operation of the following experiments. For example, the operation time of multiple thrusters could be exactly controlled simultaneously.
The force measurements of the multiple thrusters were considered first. Any two, three, or four thrusters can be selected to operate within a given time. The main results are listed in
Table 5, which indicate that the average thruster force is markedly less than that of the single thruster test. However, at the same supply pressure, the force loss does not monotonically increase with an increase in the number of activated thrusters. The force loss of each thruster is small and typically accounts for less than 5% of the single thruster force. This phenomenon could be due to the difference in the length of the pipeline. However, this experiment still proves that the maximum flow rate in this testbed provides a sufficient CO
2 supply for every thruster.
The CO
2 consumption results are also given in
Table 5. By comparing these results with those from the single-thruster consumption tests, the relationship between consumption and supply pressure was nearly linear when opening multiple thrusters.
The maximum flow from the tank of the testbed can thus supply at least four thrusters adequately. The measured force loss is unavoidable when opening two or more thrusters, but is small enough and cannot increase in proportion to the number of thrusters. Therefore, this characteristic must be considered when implementing the position control loop, and the more complex control laws may benefit from such a trend.
4.4. Air Bearing Consumption
To acquire a baseline estimate of CO
2 consumption while levitating over a given period, a float duration experiment was performed. For this experiment, the tank was filled with 0.8 kg CO
2, which then allows only three air bearings to work concurrently. The gas consumption was recorded by an electronic balance every five minutes until the stored CO
2 weighed less than 0.2 kg. Note that the gas supply to the thrusters was rejected during these tests. The air bearing consumption under different supply pressures is shown in
Table 6. While the supply pressure is regulated to 0.1 MPa, the simulator cannot float above the surface of the granite. Hence, 0.1 MPa should be excluded from this test. In addition, at least 0.2 kg CO
2 should be ensured in the tank for consistency, even though the simulator can still float freely below 0.2 kg. Finally, after comprehensively considering the thruster force value and the CO
2 consumption of the thrusters and the air bearings, 0.3 MPa was chosen as the working pressure for the simulator in all subsequent experiments. Thus, the simulator can float above the granite surface for more than 50 min.
Additionally, the CO2 tank cools markedly when exhausting, which can result in a temperature decrease in the tank and the regulation valve. The output pressure falls due to condensation in the tank, which has a strong effect of supplying CO2 to the air bearings and the thrusters, particularly if multiple thrusters are opened concurrently. To evaluate the available operation time and the dynamic parameters of the simulator more accurately, future testbed updates should ask the user to input the initial simulator mass and indoor temperature value or could a microelectronic force sensor and temperature meter could be used instead.
4.5. Moment of Inertia
Similar to the center of mass of the simulator, the moment of inertia also plays a critical role in the system dynamics modeling. To estimate the moment of inertia
of the simulator on the granite, it was assumed that the linear and angular accelerations of the simulator due to friction while the thrusters are firing are the same as the accelerations due to friction once the thrusters have closed and the simulator is coasting [
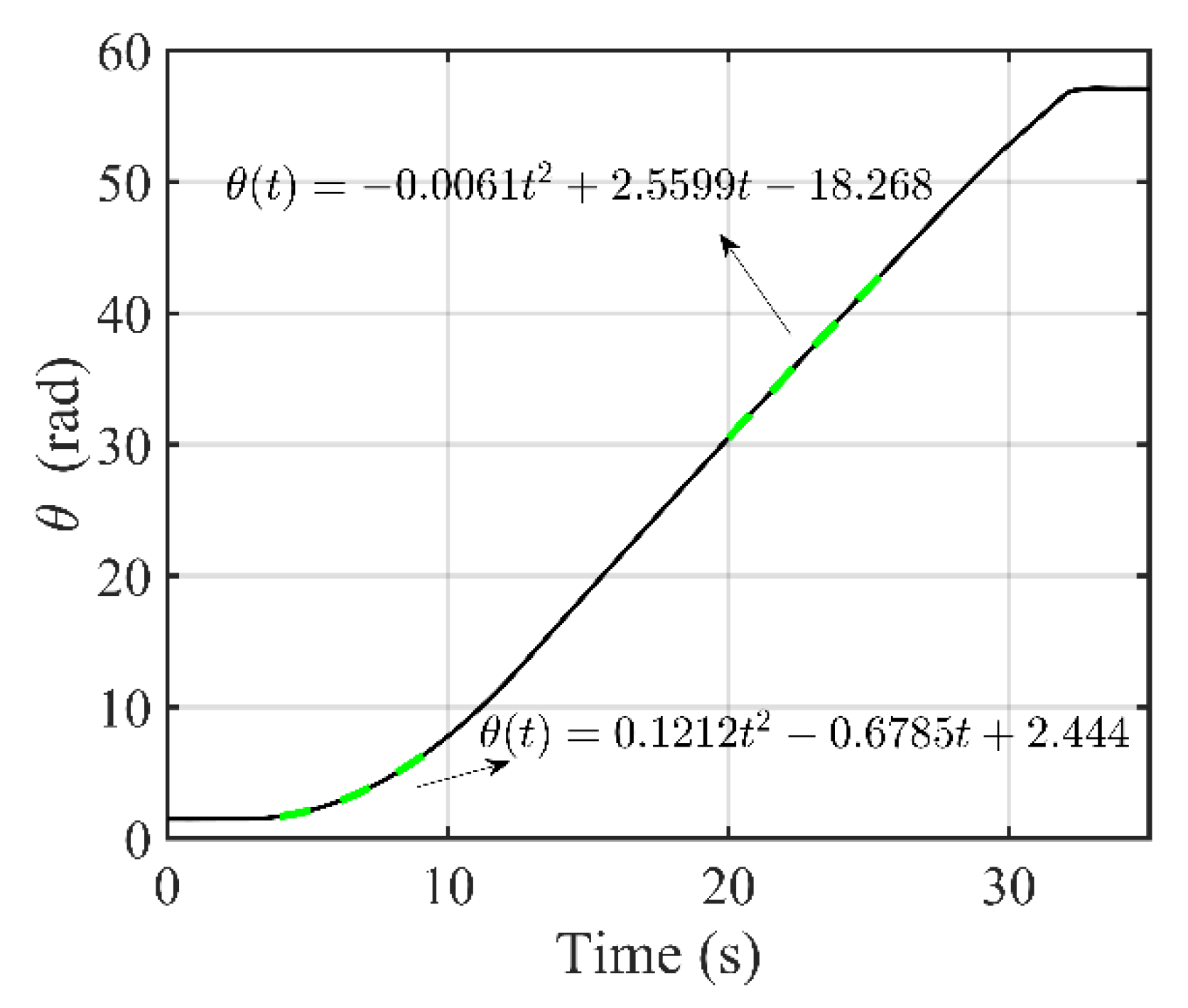
22]. The first step of the experiment is to apply a torque produced by two tangential thrusters to the stationary simulator for a given time interval, where the attitude data are recorded using the OptiTrack camera system. Next, the portions of the attitude data when the thrusters are opened are fit to the second-order model
, and the angular accelerations are obtained by
and
, where
is the torque produced by two thrusters applied to the simulator,
is the torque produced by friction while the thrusters have closed, and the firing duration of the thrusters is 10 s in all cases. A typical test is shown in
Figure 14, and the pressure regulator here is set to 0.3 MPa. As shown in
Figure 14, although the operation time of the two thrusters is 10 s, only the middle 6 s are used to reduce error, similarly to the deceleration process. These experiments are performed several times to obtain more reliable data, where the average
is 0.1445 kg·m
2 and the variance is 0.0045.
Additionally, to decrease other environmental disturbances as much as possible, measures that include thorough granite surface cleaning and the same starting point at each iteration are implemented before each separate set of experiments. Aerodynamic drag is ignored in these tests because the maximum velocity of the simulator is sufficiently small.
4.6. System Latency
To quantify the system latency of the simulator, the following series of descriptions are provided. The onboard Jeston Xavier NX computer is flashed by JetPack 4.5.1 with the L4T 32.5.1 Archive, which includes Linux Kernel 4.9 and a sample filesystem based on Ubuntu 18.04. First, the prebuilt Real-Time Kernel Package for Jeston AGX Xavier was patched to the Linux kernel, and the maximum latency of the onboard operating system was bounded at 80 μs. Second, the time consumptions of the Receive node and Control node were calculated with the ROS timestamp. Finally, the on/off switching time of the relay module and the solenoid valve are given in their product manuals. All results are summarized in
Table 7. Therefore, it is easy to calculate that the maximum system latency is approximately 4.05 ms with which to simultaneously open the specified thrusters, and 4.65 ms to close all thrusters. Future work should determine whether the nominal latency of the relay module and the solenoid valve is correct by using an oscilloscope to measure the timing and behavior of the real digital outputs.
6. Conclusions
This paper described the design of the SOOST situated in the SKLMCMS at NUAA, which primarily includes a detailed description of the spacecraft simulator. The simulator can operate on the testbed under the motion of two translational and one rotational DOF with quasi-frictionless and microgravity dynamic behavior, and the eight onboard thrusters could provide control forces or torques to maneuver the simulator on the granite testbed. The thrusters are equivalent to the actuators found in real orbital spacecraft and enhance the relevant dynamic equivalence.
The key parameters of the SOOST are identified by a series of systematic characterization tests, which are required in order to build an accurate model for attitude and position control. The centroid of the redesigned testbed system is determined to be within 6 mm of the geometric center, and the moment of inertia on the granite is calculated to be 0.1445 kg·m2. The consumption of the thrusters and the air bearings were discussed in detail for different supply pressures. For example, with a supply pressure of 0.3 MPa, any four thrusters require a consumption rate of 1.656 g/s; all three air bearings require a consumption rate of 0.187 g/s; and a single thruster’s force is 0.12 N. Then, the maximum system latency was found to be approximately 4.05 ms to simultaneously enable the thrusters, and 4.65 ms to close all thrusters. In addition, a modified DCF-based method was presented to provide autonomous navigation without an external visual system. The results of various experiments demonstrate the efficiency and performance of the proposed method.
With a series of systematic characterization tests, a fundamental testbed study could provide high repeatability, consistency, and human-error reduction. Thus, the SOOST developed by NUAA can serve as a valuable tool with which to develop control methods for simulating spacecraft dynamics and control.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}