Numerical Simulation of Tiltrotor Flow Field during Shipboard Take-Off and Landing Based on CFD-CSD Coupling



Abstract
:1. Introduction
2. Numerical Simulation Method
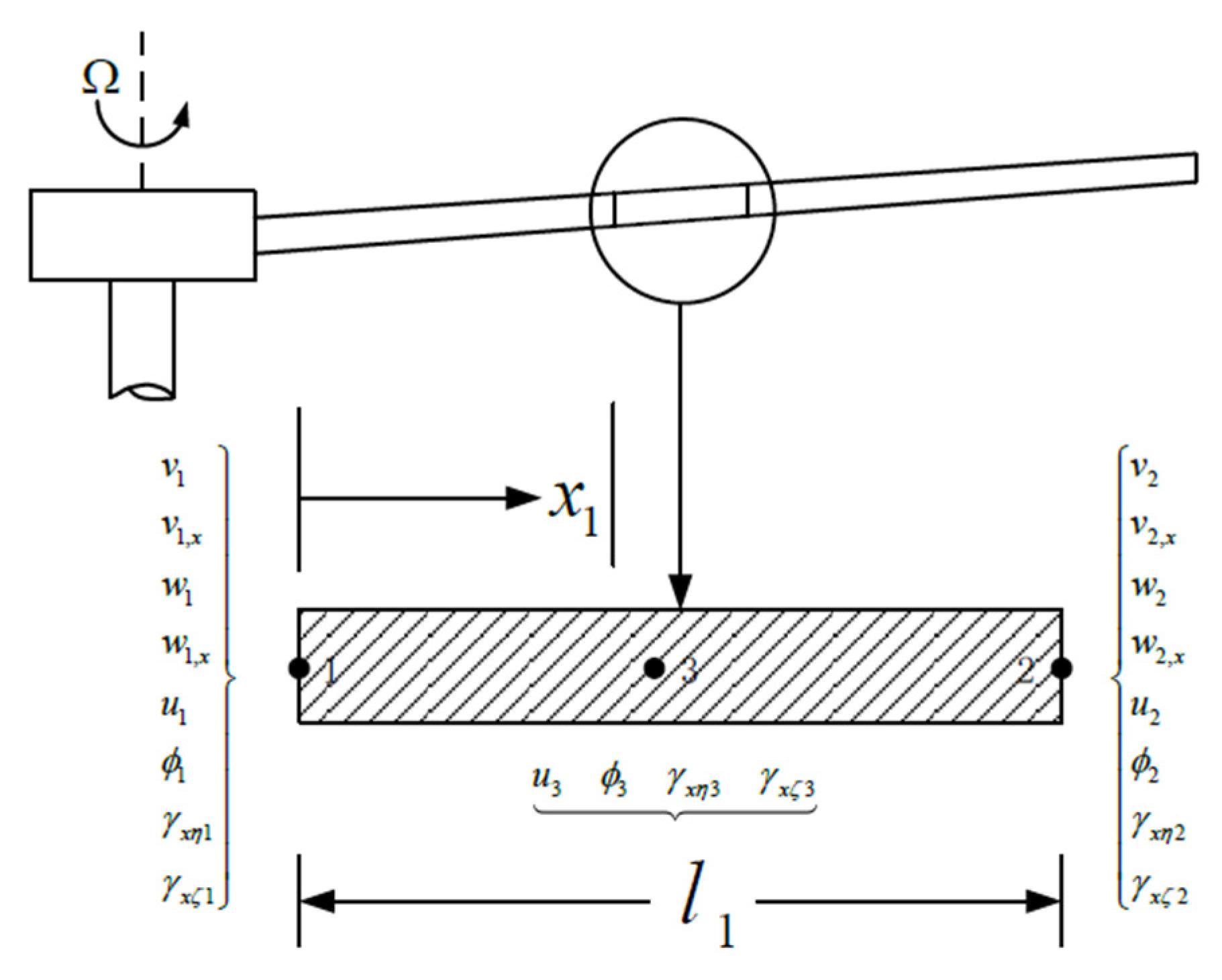
2.1. CFD and CSD Numerical Solvers
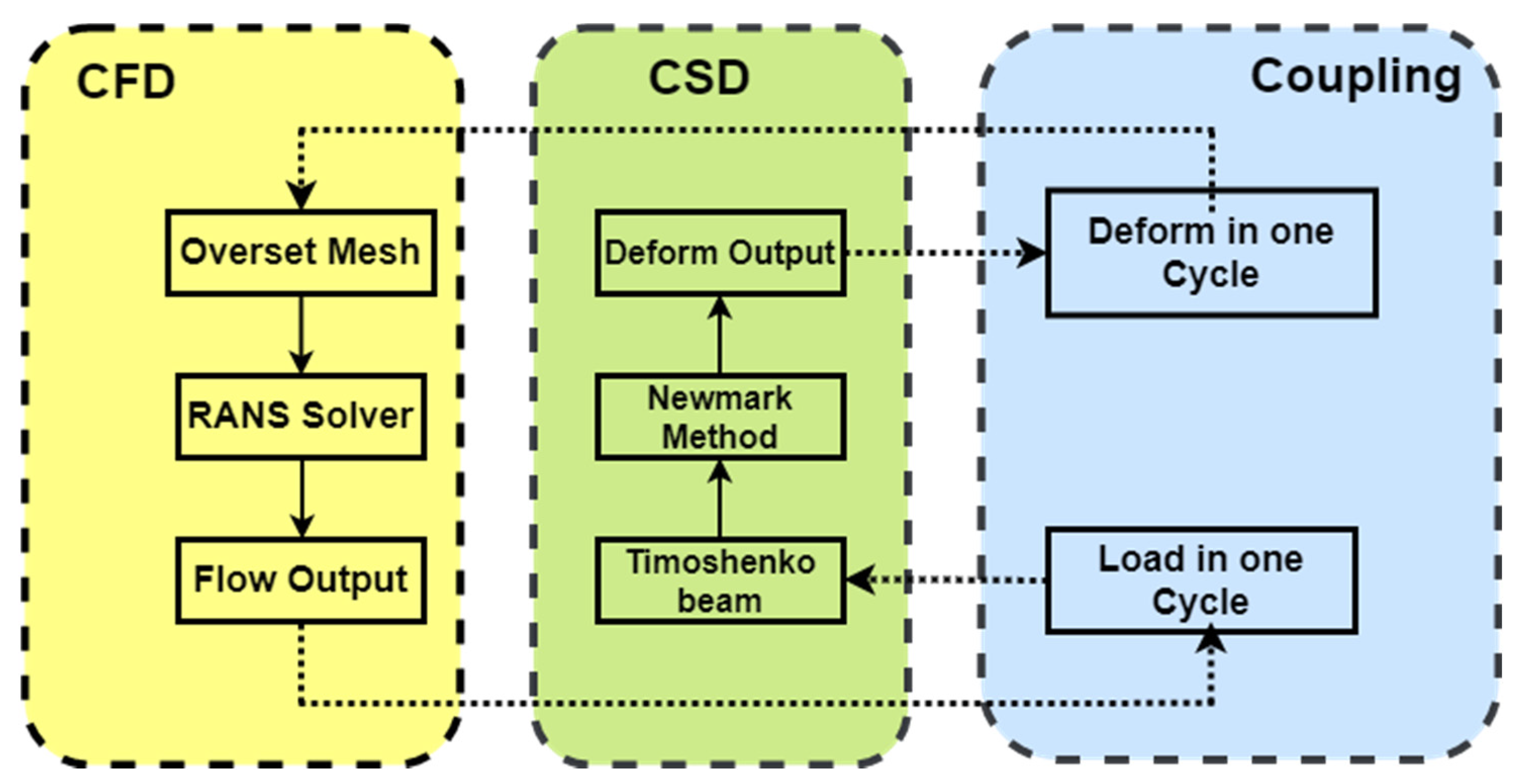
2.2. CFD-CSD Coupling
3. Verification
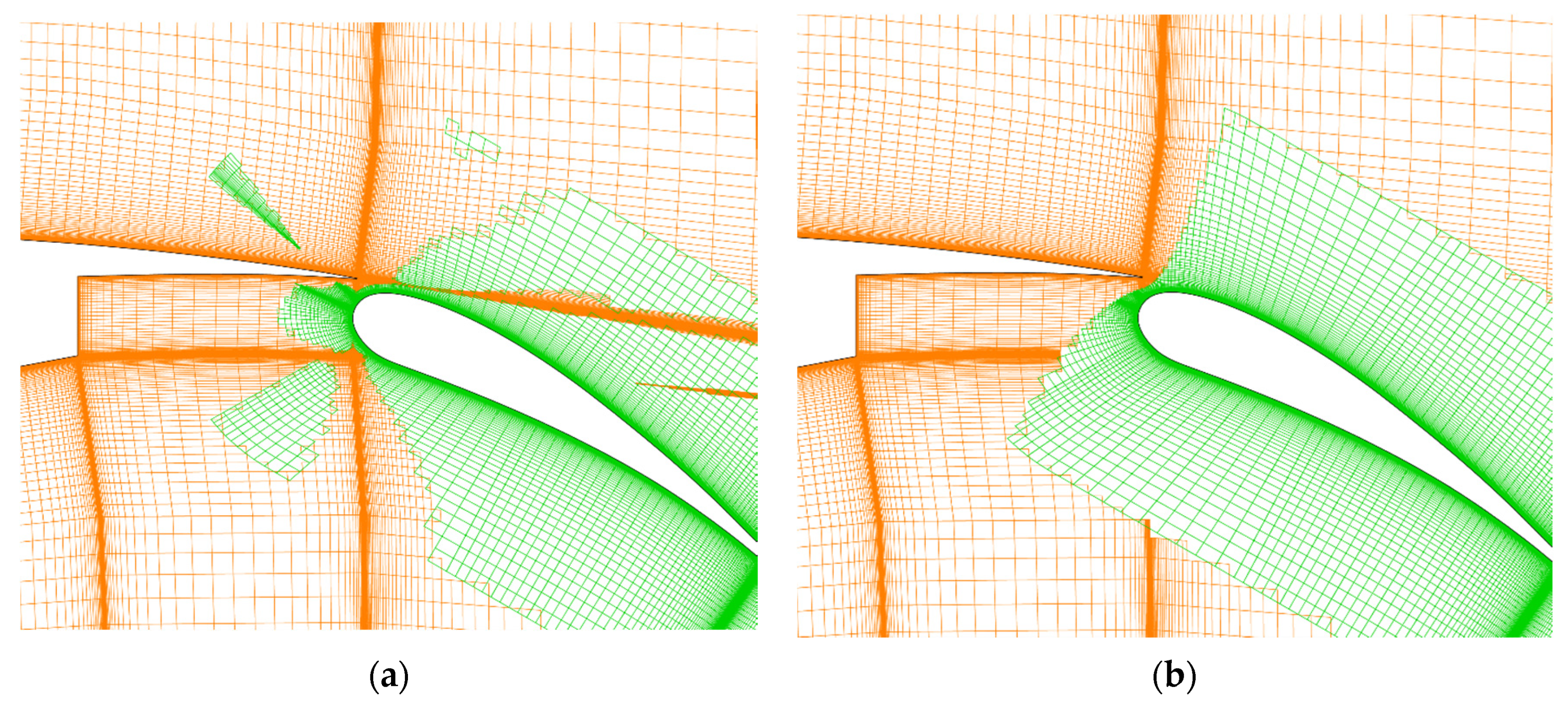
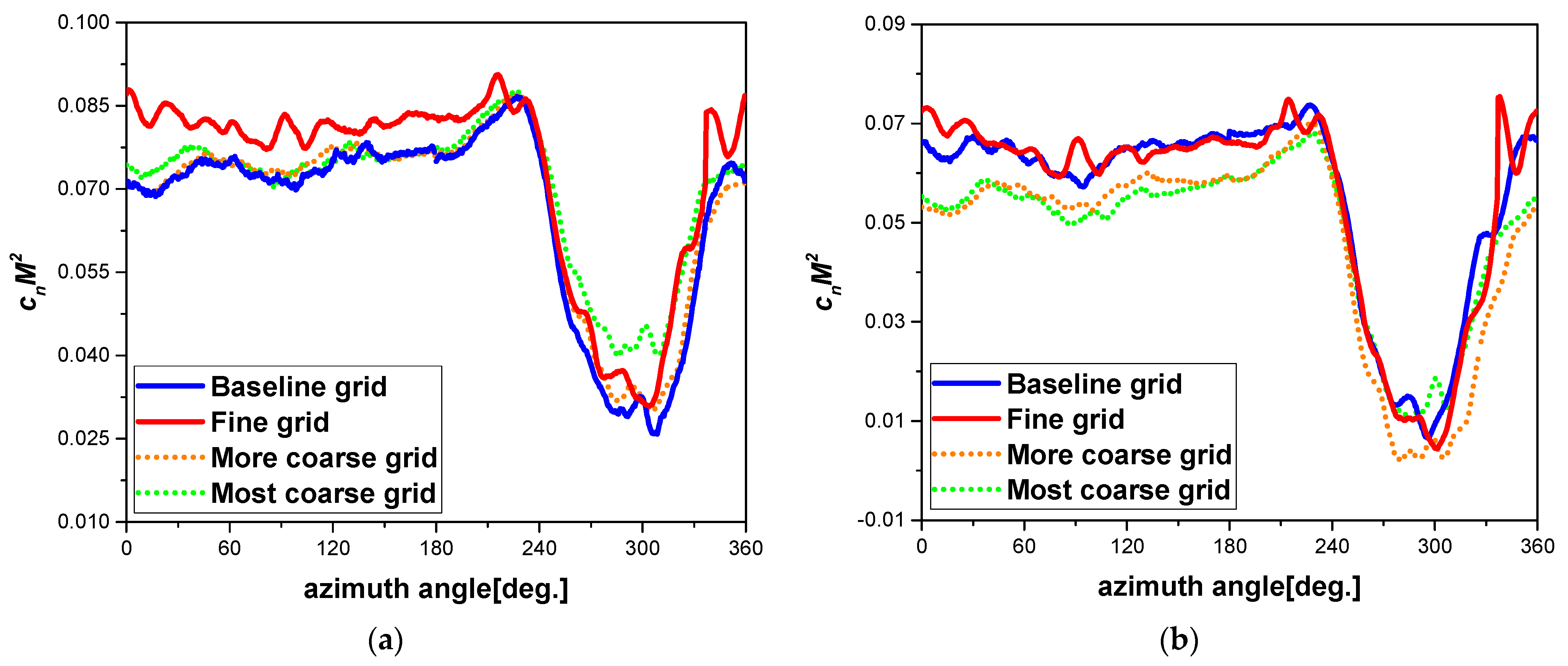
3.1. Grid Independence Verification
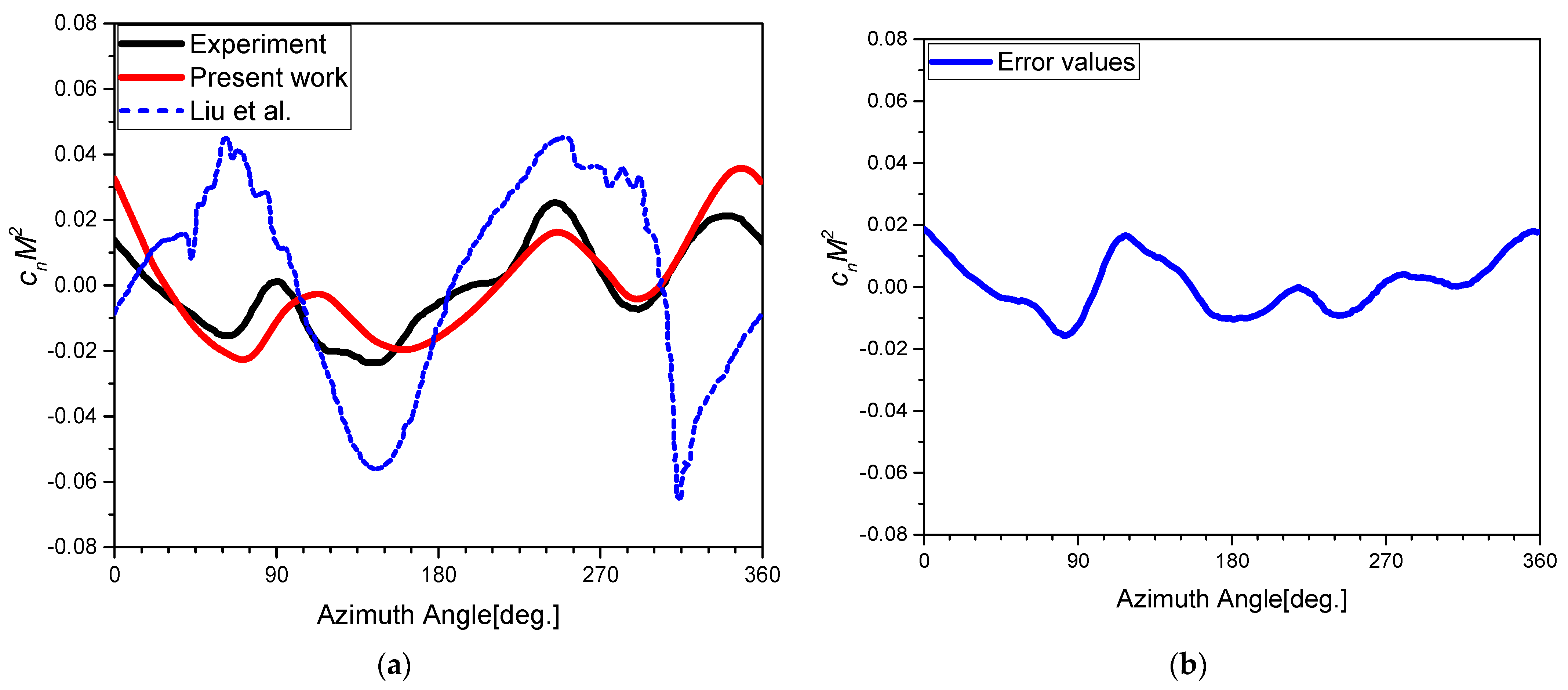
3.2. Verification of the CFD-CSD Coupling Method
4. Results
4.1. Rotor Flow Field When the Ship Is Not Moving
4.2. Rotor Flow Field When the Ship Is Moving
5. Conclusions
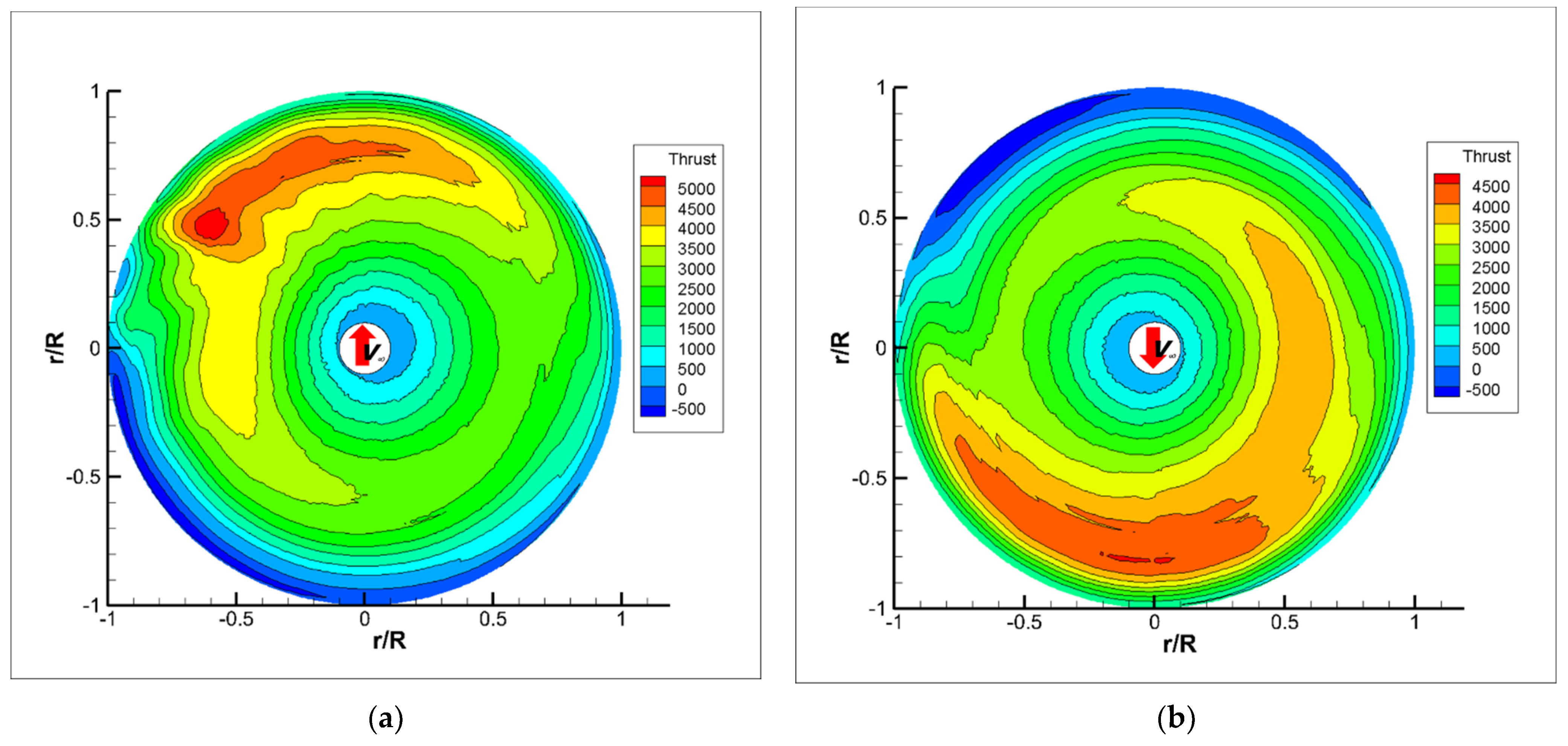
- When the ship was not moving, the fountain flow generated by the two rotors near the centerline of the fuselage caused a significant change in the spanwise thrust of the blade. The thrust weakened with the distance moving closer to the location of the fountain flow effect. The equivalent ground effect of the wing on the rotor was relatively weak, but the wing affected the fountain flow; thus, a low-thrust zone occurred on the retreating side.
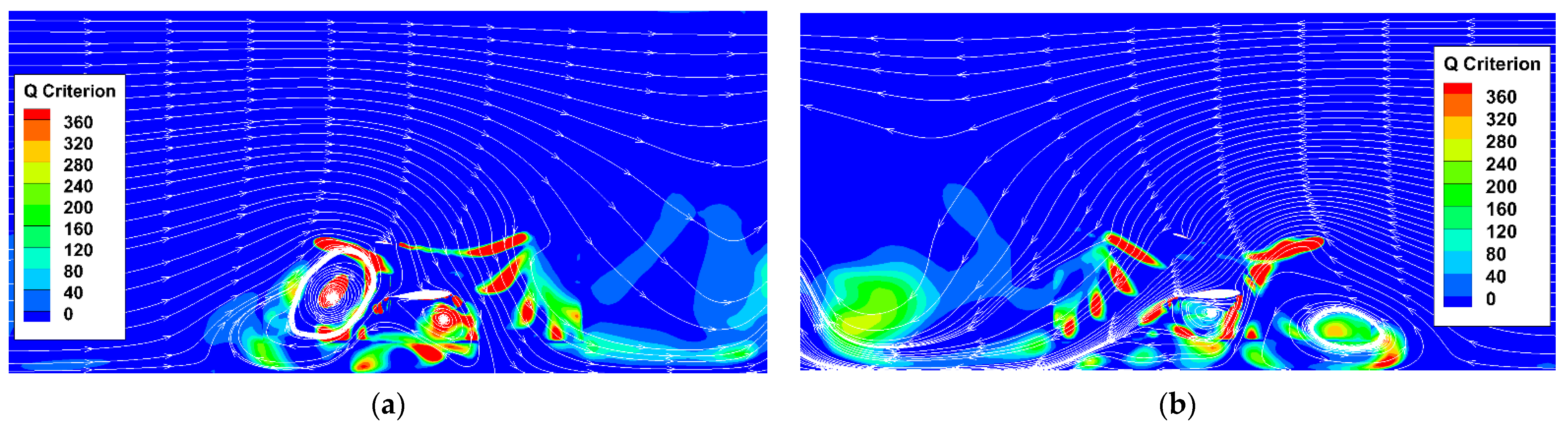
- When the ship was moving and the rotor was tilted backward, the wake rolled upward before it reached the ship’s deck, due to the interference of the wing vortex. The unstable flow caused large frequency fluctuations in the load at ψ = 360° because of the equivalent ground effect of the wing and the interference of the wing vortex.
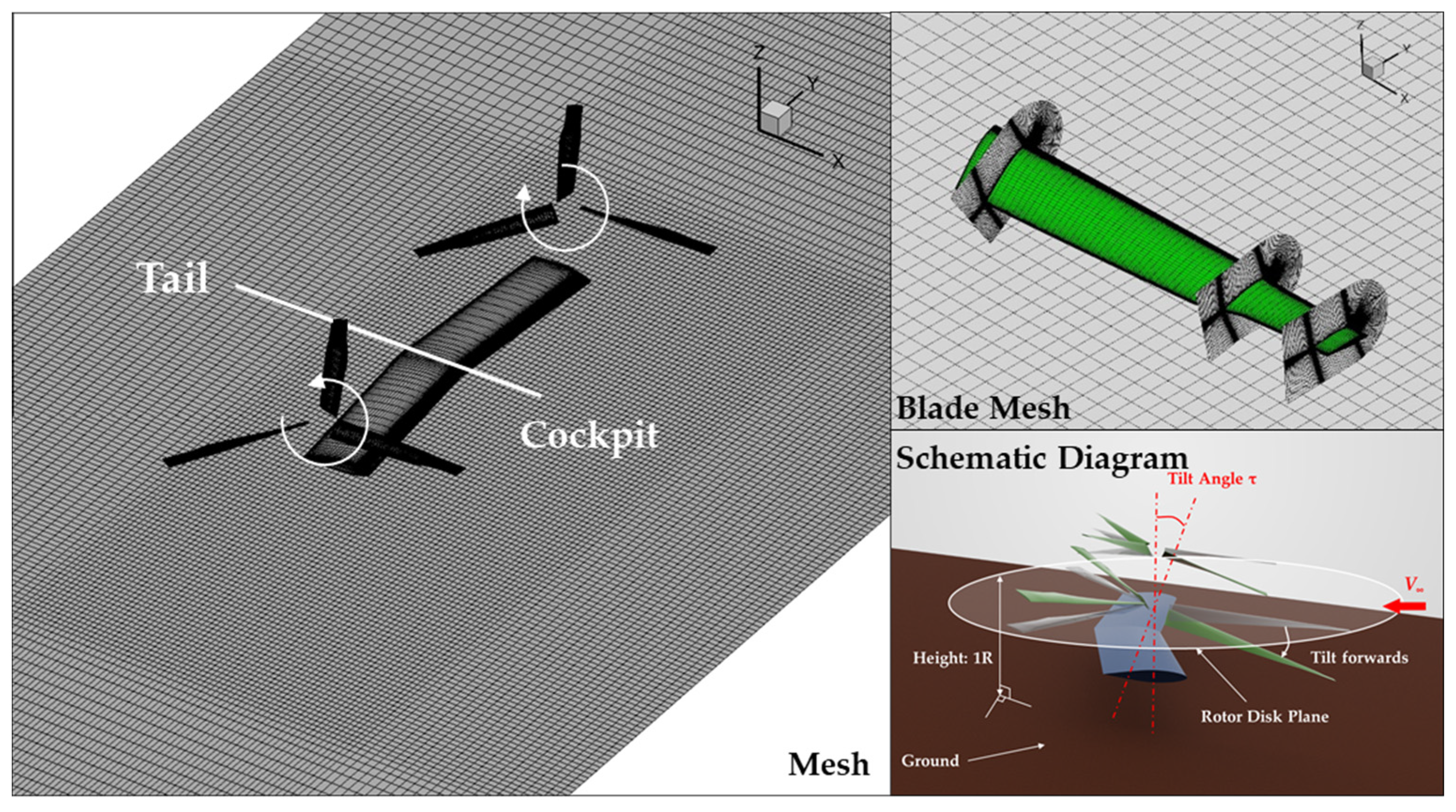
- When the tilt angle was zero, the chord line of the wing, the ship’s deck, and the rotor’s plane were almost parallel, and the equivalent ground effect of the wing on the rotor was less pronounced. In contrast, when the ship was moving and the rotor shaft was tilted, the three surfaces were not parallel. Thus, the equivalent ground effect of the wing increased the thrust of the rotor in the downstream direction of the sea wind. The wing significantly affected the rotor’s aerodynamic characteristics when the tiltrotor took off or landed with a small tilt angle.
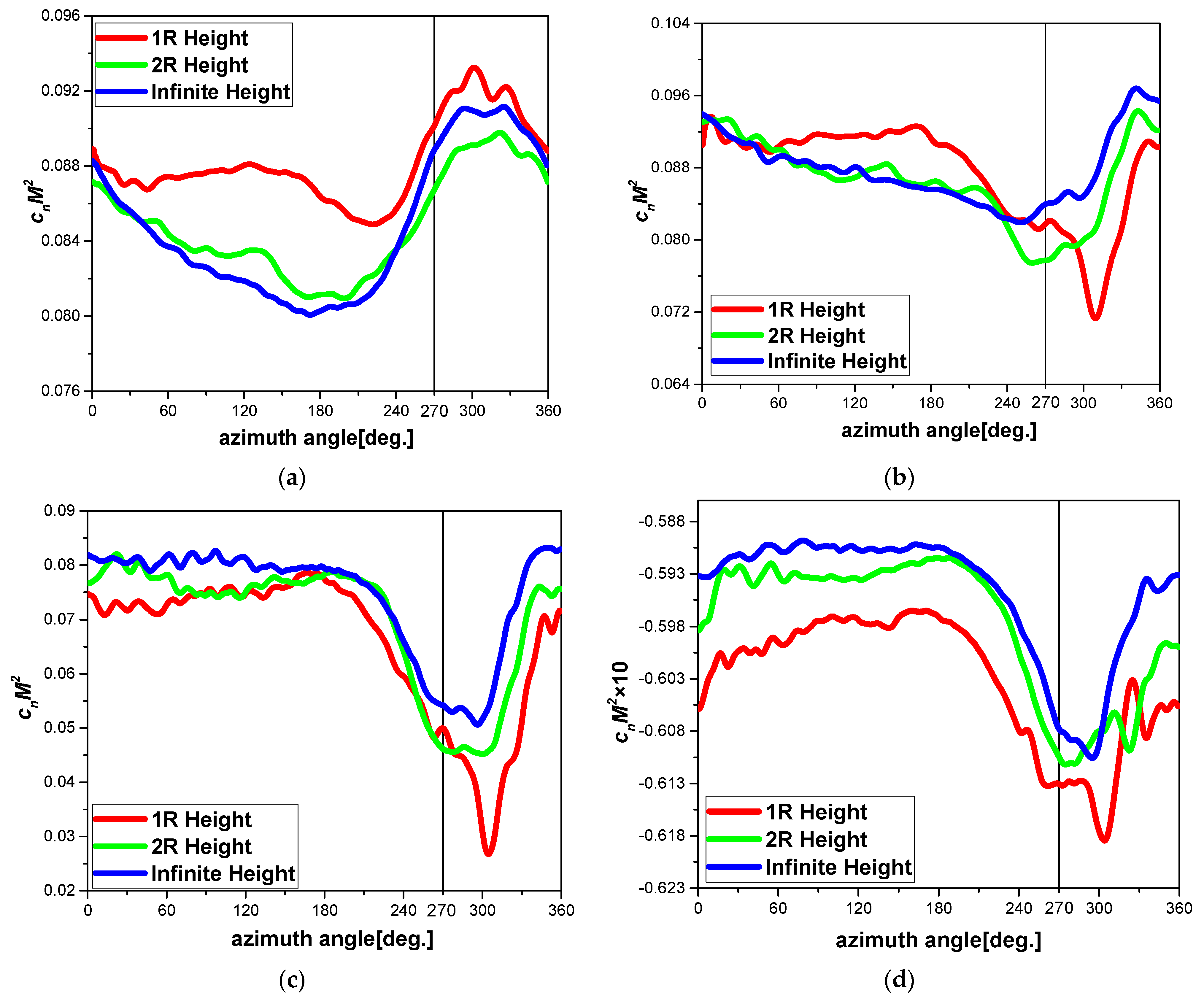
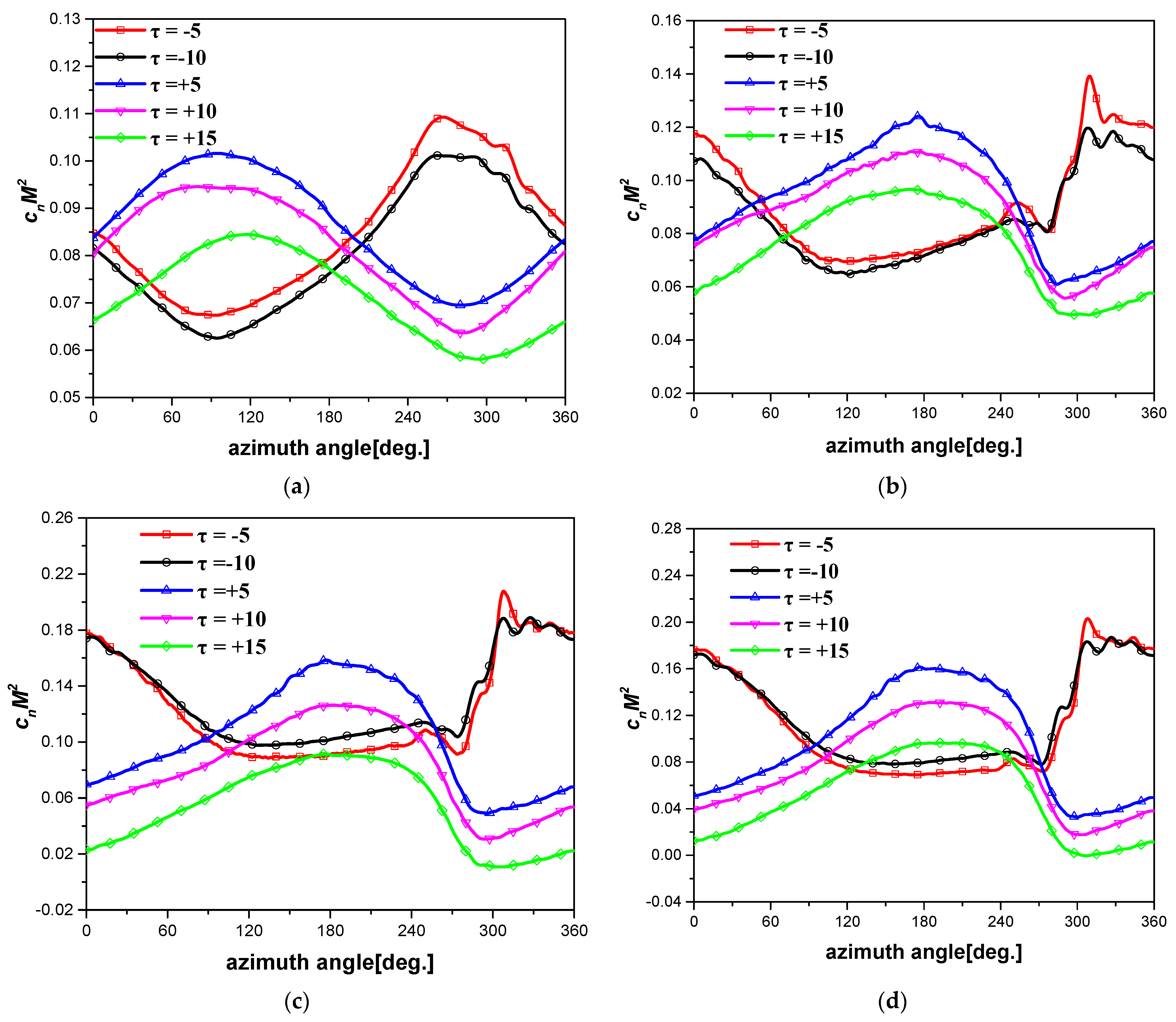
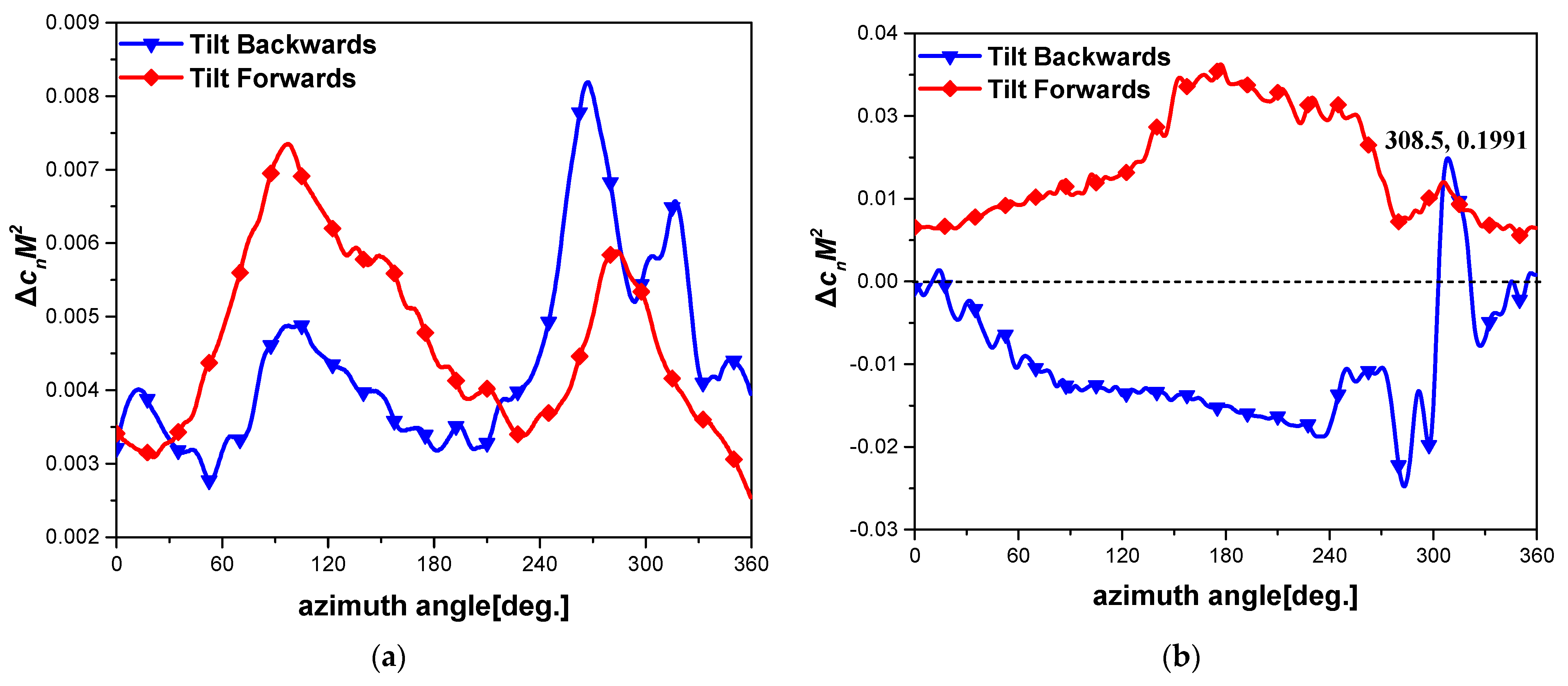
- During the take-off and landing of the tiltrotor with a small tilt angle, the normal forces of the 0.5R and 0.7R sections were higher for a smaller tilt angle than for a larger angle, regardless of whether the rotor was tilted forward or backward. In contrast, in the 0.8R section close to the blade tip, the normal force coefficients were not larger for a smaller tilt angle when the rotor was tilted backward except for the small range around ψ = 308°. In addition, the difference in the normal force coefficient between the 5° and 10° tilt angle sections was much smaller in section 0.8R than in section 0.5R.
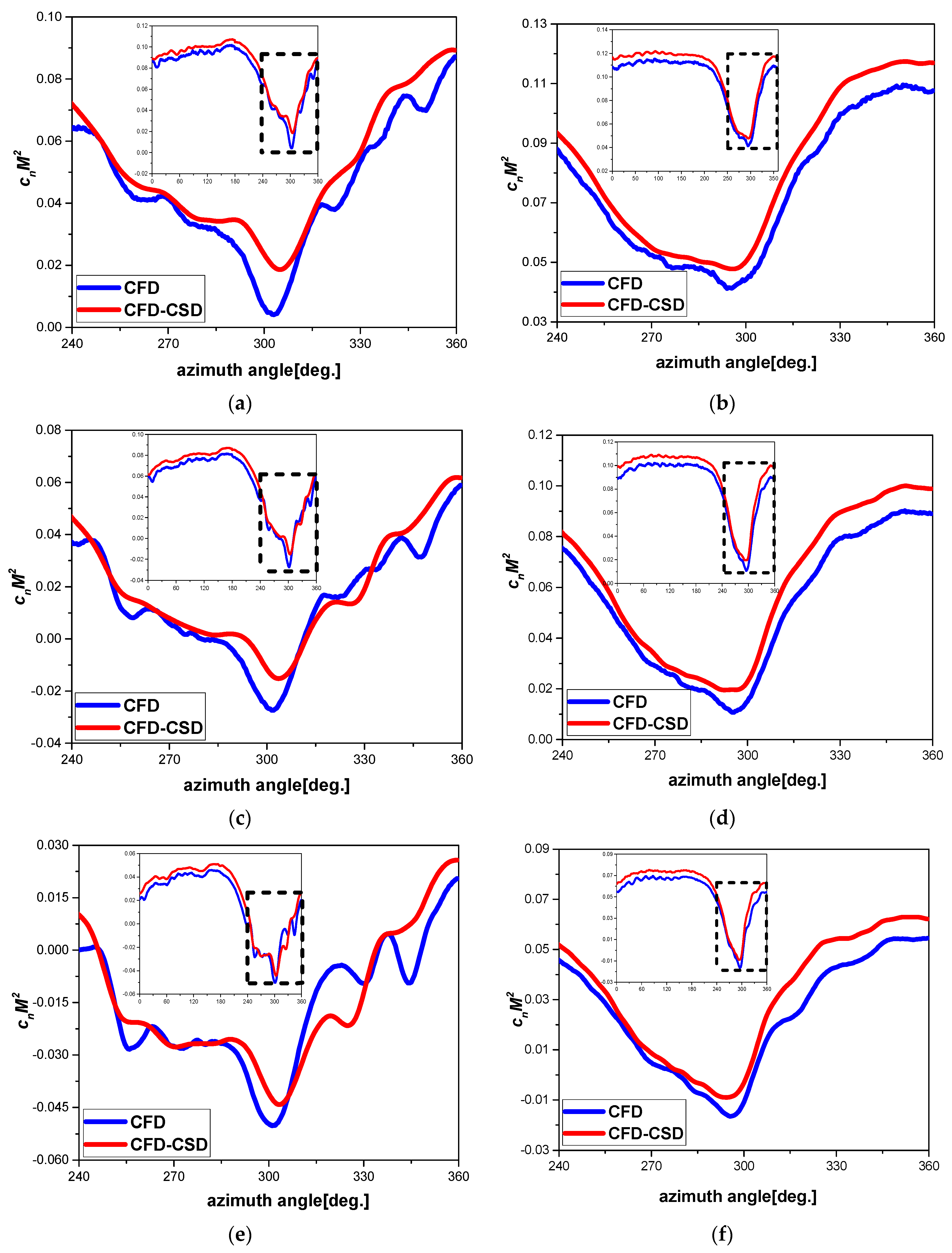
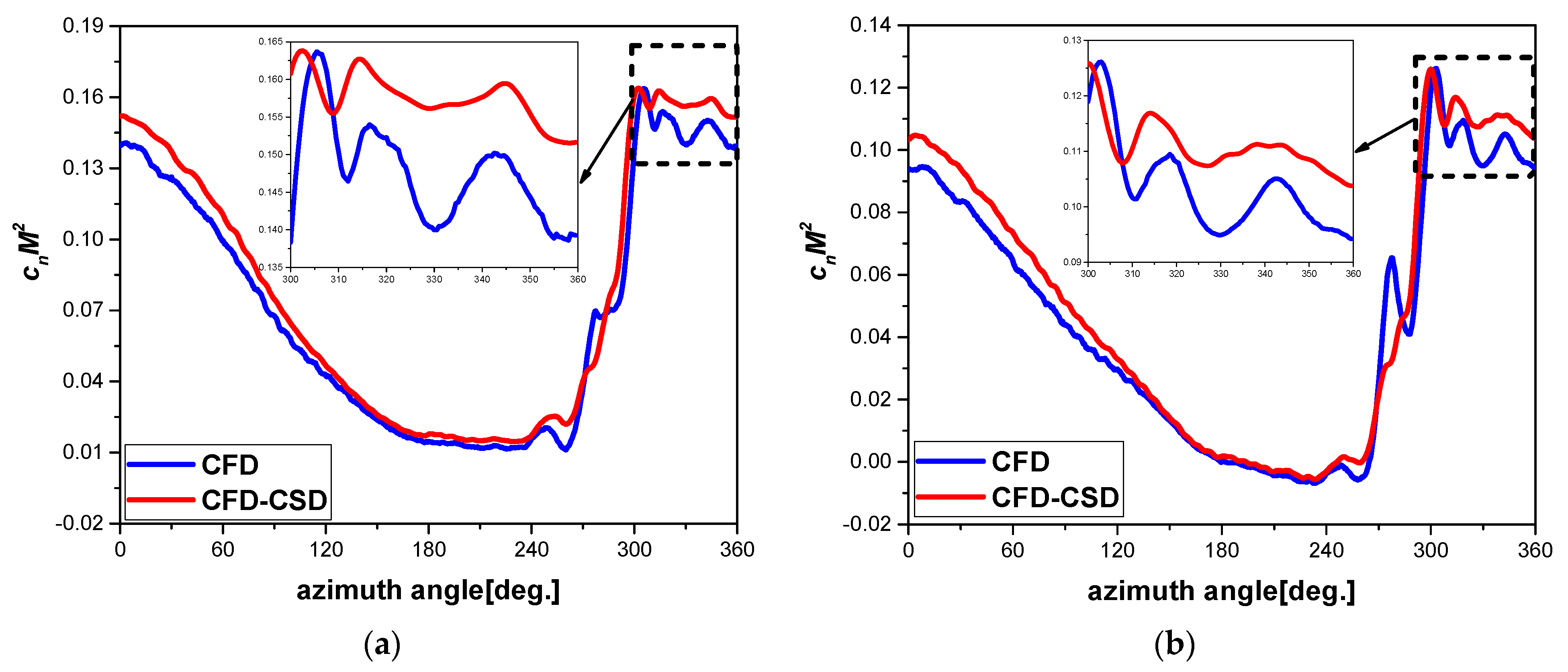
- The elastic deformation of the tiltrotor’s blade during shipboard take-off and landing decreases the fluctuations in the amplitude of the normal force at the rotor’s tip in one revolution. A comparison of the results obtained from the CFD and coupled CFD-CSD methods for a 5° backward tilt angle indicates that the elastic deformation reduces the amplitude of the thrust fluctuations caused by the interference of the wing vortex. The aerodynamic characteristics of the blade are more sensitive to elastic deformation in regions of higher aerodynamic force fluctuations.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Han, D.; Barakos, G.N. Transient Aeroelastic Response of a Rotor during Rotor Speed Transition in Forward Flight. J. Aircr. 2022, 1–7. [Google Scholar] [CrossRef]
- Kucab, J.; Moulton, M.; Fan, M.; Steinhoff, J. The Prediction of Rotor Flows in Ground-Effect with a New Hybrid Method. In Proceedings of the 17th Applied Aerodynamics Conference, Norfolk, VA, USA, 28 June–1 July 1999; American Institute of Aeronautics and Astronautics: Norfolk, VA, USA, 1999. [Google Scholar]
- Bhattacharyya, S.; Conlisk, A. The Structure of the Rotor Wake in Ground Effect. In Proceedings of the 41st Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 2003; American Institute of Aeronautics and Astronautics: Reno, NV, USA, 2003. [Google Scholar]
- Kang, N.; Sun, M. Technical Note: Prediction of the Flow Field of a Rotor in Ground Effect. J. Am. Helicopter Soc. 1997, 42, 195–198. [Google Scholar] [CrossRef]
- Hwang, J.Y.; Kwon, O.J. Assessment of S-76 Rotor Hover Performance in Ground Effect Using an Unstructured Mixed Mesh Method. Aerosp. Sci. Technol. 2019, 84, 223–236. [Google Scholar] [CrossRef]
- Lakshminarayan, V.K.; Kalra, T.S.; Baeder, J.D. Detailed Computational Investigation of a Hovering Microscale Rotor in Ground Effect. AIAA J. 2013, 51, 893–909. [Google Scholar] [CrossRef]
- Young, L.A. Simulated Tiltrotor Aircraft Operation in Close Proximity to a Building in Wind and Ground-Effect Conditions. In Proceedings of the 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015; American Institute of Aeronautics and Astronautics: Dallas, TX, USA, 2015. [Google Scholar]
- Potsdam, M.A.; Strawn, R.C. CFD Simulations of Tiltrotor Configurations in Hover. J. Am. Helicopter Soc. 2005, 50, 82–94. [Google Scholar] [CrossRef] [Green Version]
- Ye, L.; Zhang, Y.; Yang, S.; Zhu, X.; Dong, J. Numerical Simulation of Aerodynamic Interaction for a Tilt Rotor Aircraft in Helicopter Mode. Chin. J. Aeronaut. 2016, 29, 843–854. [Google Scholar] [CrossRef] [Green Version]
- Xiao, Y.; Xu, G.-H.; Shi, Y.-J. Aeroelastic Analysis of Helicopter Rotors Using Computational Fluid Dynamics/Comprehensive Analysis Loose Coupling Model. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 621–630. [Google Scholar] [CrossRef]
- Hu, Z.; Xu, G.; Shi, Y. A Robust Overset Assembly Method for Multiple Overlapping Bodies. Int. J. Numer. Methods Fluids 2021, 93, 653–682. [Google Scholar] [CrossRef]
- Hu, Z.; Xu, G.; Shi, Y. A New Study on the Gap Effect of an Airfoil with Active Flap Control Based on the Overset Grid Method. Int. J. Aeronaut. Space Sci. 2021, 22, 779–801. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, G.; Shi, Y. Numerical Investigation on Noise Reduction of Rotor Blade-Vortex Interaction Using Blade Surface Jet Blowing. Aerosp. Sci. Technol. 2021, 116, 106868. [Google Scholar] [CrossRef]
- Ye, Z.; Zhan, F.; Xu, G. Numerical Research on the Unsteady Evolution Characteristics of Blade Tip Vortex for Helicopter Rotor in Forward Flight. Int. J. Aeronaut. Space Sci. 2020, 21, 865–878. [Google Scholar] [CrossRef]
- Bauchau, O.; Ahmad, J. Advanced CFD and CSD Methods for Multidisciplinary Applications in Rotorcraft Problems. In Proceedings of the 6th Symposium on Multidisciplinary Analysis and Optimization, Bellevue, WA, USA, 4–6 September 1996; American Institute of Aeronautics and Astronautics: Bellevue, WA, USA, 1996. [Google Scholar]
- Pomin, H.; Wagner, S. Aeroelastic Analysis of Helicopter Rotor Blades on Deformable Chimera Grids. J. Aircr. 2004, 41, 577–584. [Google Scholar] [CrossRef]
- Romani, G.; Casalino, D. Rotorcraft Blade-Vortex Interaction Noise Prediction Using the Lattice-Boltzmann Method. Aerosp. Sci. Technol. 2019, 88, 147–157. [Google Scholar] [CrossRef]
- Min, B.-Y.; Sankar, L.N.; Bauchau, O.A. A CFD–CSD Coupled-Analysis of HART-II Rotor Vibration Reduction Using Gurney Flaps. Aerosp. Sci. Technol. 2016, 48, 308–321. [Google Scholar] [CrossRef]
- Lim, J.W. Consideration of Structural Constraints in Passive Rotor Blade Design for Improved Performance. Aeronaut. J. 2015, 119, 1513–1539. [Google Scholar] [CrossRef]
- Khawar, J.; Ghafoor, A.; Chao, Y. Validation of CFD-CSD Coupling Interface Methodology Using Commercial Codes. Int. J. Numer. Methods Fluids 2011, 65, 475–495. [Google Scholar] [CrossRef]
- Jung, Y.S.; Yu, D.O.; Kwon, O.J. Aeroelastic Analysis of High-Aspect-Ratio Wings Using a Coupled CFD-CSD Method. Trans. Jpn. Soc. Aeronaut. Space Sci. 2016, 59, 123–133. [Google Scholar] [CrossRef] [Green Version]
- Goulos, I. Modelling the Aeroelastic Response and Flight Dynamics of a Hingeless Rotor Helicopter Including the Effects of Rotor-Fuselage Aerodynamic Interaction. Aeronaut. J. 2015, 119, 433–478. [Google Scholar] [CrossRef]
- Wang, S.; Han, J.; Yun, H.; Chen, X. CFD-CSD Method for Coupled Rotor-Fuselage Vibration Analysis with Free Wake-Panel Coupled Model. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2021, 235, 1343–1354. [Google Scholar] [CrossRef]
- Löhner, R. Robust, Vectorized Search Algorithms for Interpolation on Unstructured Grids. J. Comput. Phys. 1995, 118, 380–387. [Google Scholar] [CrossRef]
- Friedmann, P.P.; Glaz, B.; Palacios, R. A Moderate Deflection Composite Helicopter Rotor Blade Model with an Improved Cross-Sectional Analysis. Int. J. Solids Struct. 2009, 46, 2186–2200. [Google Scholar] [CrossRef] [Green Version]
- Xing, Y.; Zhang, H.; Wang, Z. Highly Precise Time Integration Method for Linear Structural Dynamic Analysis. Int. J. Numer. Methods Eng. 2018, 116, 505–529. [Google Scholar] [CrossRef]
- Tung, C.; Caradonna, F.X.; Johnson, W.R. The Prediction of Transonic Flows on an Advancing Rotor. J. Am. Helicopter Soc. 1986, 31, 4–9. [Google Scholar] [CrossRef]
- Yeo, H.; Potsdam, M. Rotor Structural Loads Analysis Using Coupled Computational Fluid Dynamics/Computational Structural Dynamics. J. Aircr. 2016, 53, 87–105. [Google Scholar] [CrossRef] [Green Version]
- Felker, F.F.; Young, L.A.; Signor, D.B. Performance and Loads Data from a Hover Test of a Full-Scale Advanced Technology XV-15 Rotor; NASA TM-86854; NASA: Washington, DC, USA, 1986; 359p. [Google Scholar]
- Van der Wall, B.G.; Burley, C.L.; Yu, Y.; Richard, H.; Pengel, K.; Beaumier, P. The HART II Test—Measurement of Helicopter Rotor Wakes. Aerosp. Sci. Technol. 2004, 8, 273–284. [Google Scholar] [CrossRef]
- Smith, M.J.; Lim, J.W. An Assessment of CFD/CSD Prediction State-of-the-Art Using the HART II International Workshop Data. In Proceedings of the 68th Annual Forum of the American Helicopter Society, Fort Worth, TX, USA, 1–3 May 2012. [Google Scholar]
- Liu, Y.; Anusonti-Inthra, P.; Diskin, B. Development and Validation of a Multidisciplinary Tool for Accurate and Efficient Rotorcraft Noise Prediction (MUTE); NASA: Washington, DC, USA, 2011; 74p. [Google Scholar]
- Servera, G.; Beaumier, P.; Costes, M. A Weak Coupling Method between the Dynamics Code HOST and the 3D Unsteady Euler Code WAVES. Aerosp. Sci. Technol. 2001, 5, 397–408. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid | Blade Mesh | Refined Background | Big Background | Wing | Total Number |
|---|---|---|---|---|---|
| Baseline | 2,120,398 × 6 | 4,453,908 | 1,931,776 | 1,676,408 | 10,182,490 |
| Fine | 3,865,984 × 6 | 9,681,424 | 3,771,264 | 1,676,408 | 18,995,080 |
| Coarser | 1,716,870 × 6 | 3,592,092 | 1,569,152 | 1,676,408 | 8,554,521 |
| Coarsest | 1,273,016 × 6 | 1,802,304 | 805,504 | 1,676,408 | 5,557,231 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, P.; Hu, Z.; Xu, G.; Shi, Y. Numerical Simulation of Tiltrotor Flow Field during Shipboard Take-Off and Landing Based on CFD-CSD Coupling. Aerospace 2022, 9, 261. https://doi.org/10.3390/aerospace9050261
Yu P, Hu Z, Xu G, Shi Y. Numerical Simulation of Tiltrotor Flow Field during Shipboard Take-Off and Landing Based on CFD-CSD Coupling. Aerospace. 2022; 9(5):261. https://doi.org/10.3390/aerospace9050261
Chicago/Turabian StyleYu, Peng, Zhiyuan Hu, Guohua Xu, and Yongjie Shi. 2022. "Numerical Simulation of Tiltrotor Flow Field during Shipboard Take-Off and Landing Based on CFD-CSD Coupling" Aerospace 9, no. 5: 261. https://doi.org/10.3390/aerospace9050261
APA StyleYu, P., Hu, Z., Xu, G., & Shi, Y. (2022). Numerical Simulation of Tiltrotor Flow Field during Shipboard Take-Off and Landing Based on CFD-CSD Coupling. Aerospace, 9(5), 261. https://doi.org/10.3390/aerospace9050261