
Real-Time Fuel Optimization and Guidance for Spacecraft Rendezvous and Docking

Abstract
:1. Introduction
- Formulation of an orbit optimization problem that considers the shape of CubeSats;
- Analytical solution of the attitude guidance optimization problem;
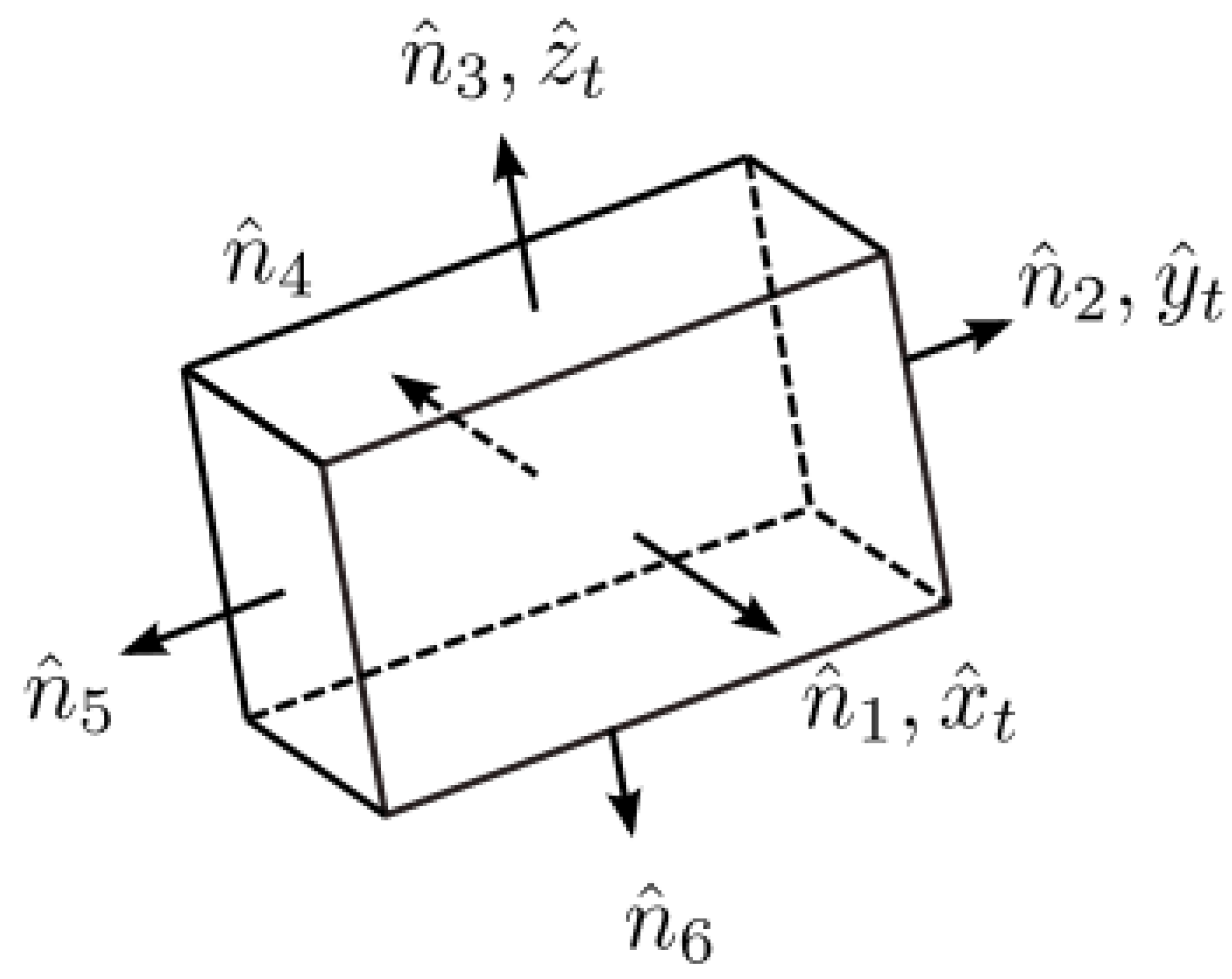
- Collision avoidance method based on geometry of CubeSats.
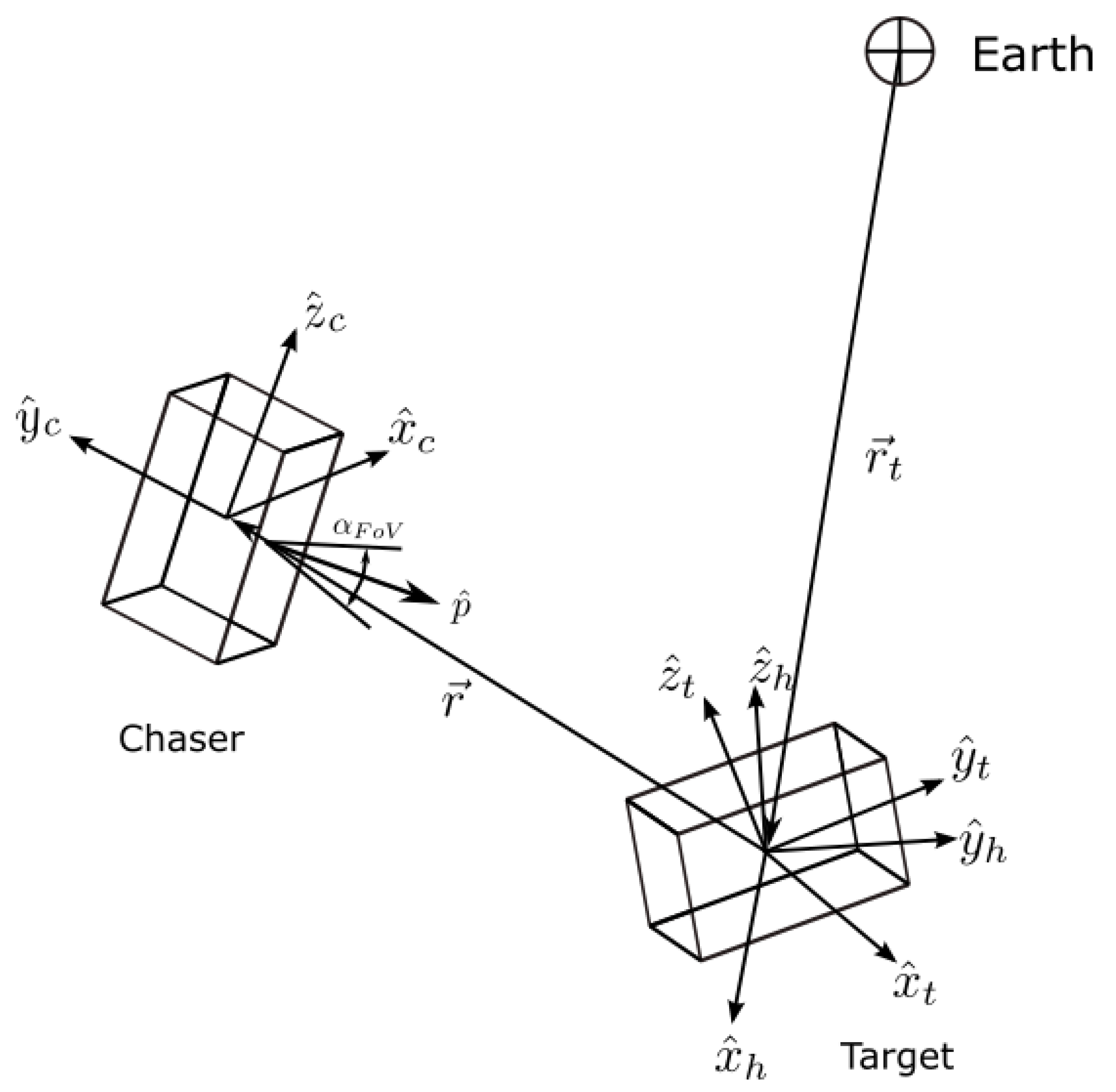
2. RVD Model
2.1. Orbital Equations of Motion
2.2. Attitude Equations of Motion
3. Fuel Optimization Problem
3.1. Objective Function
3.2. Constraints
3.3. Chaser’s Initial and Final Conditions
4. Decoupled Optimization Problem
4.1. Orbit Optimization
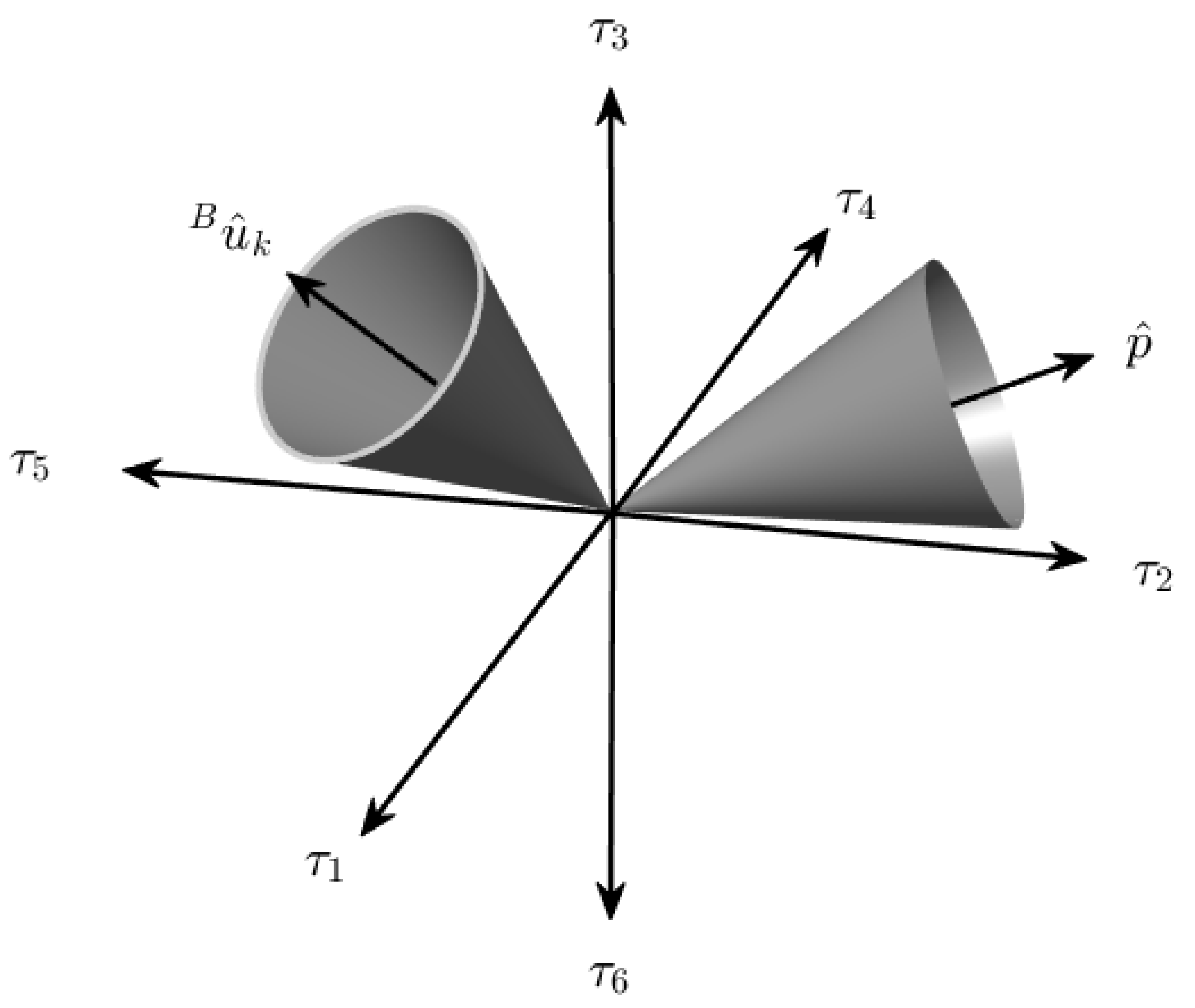
4.2. Attitude Optimization
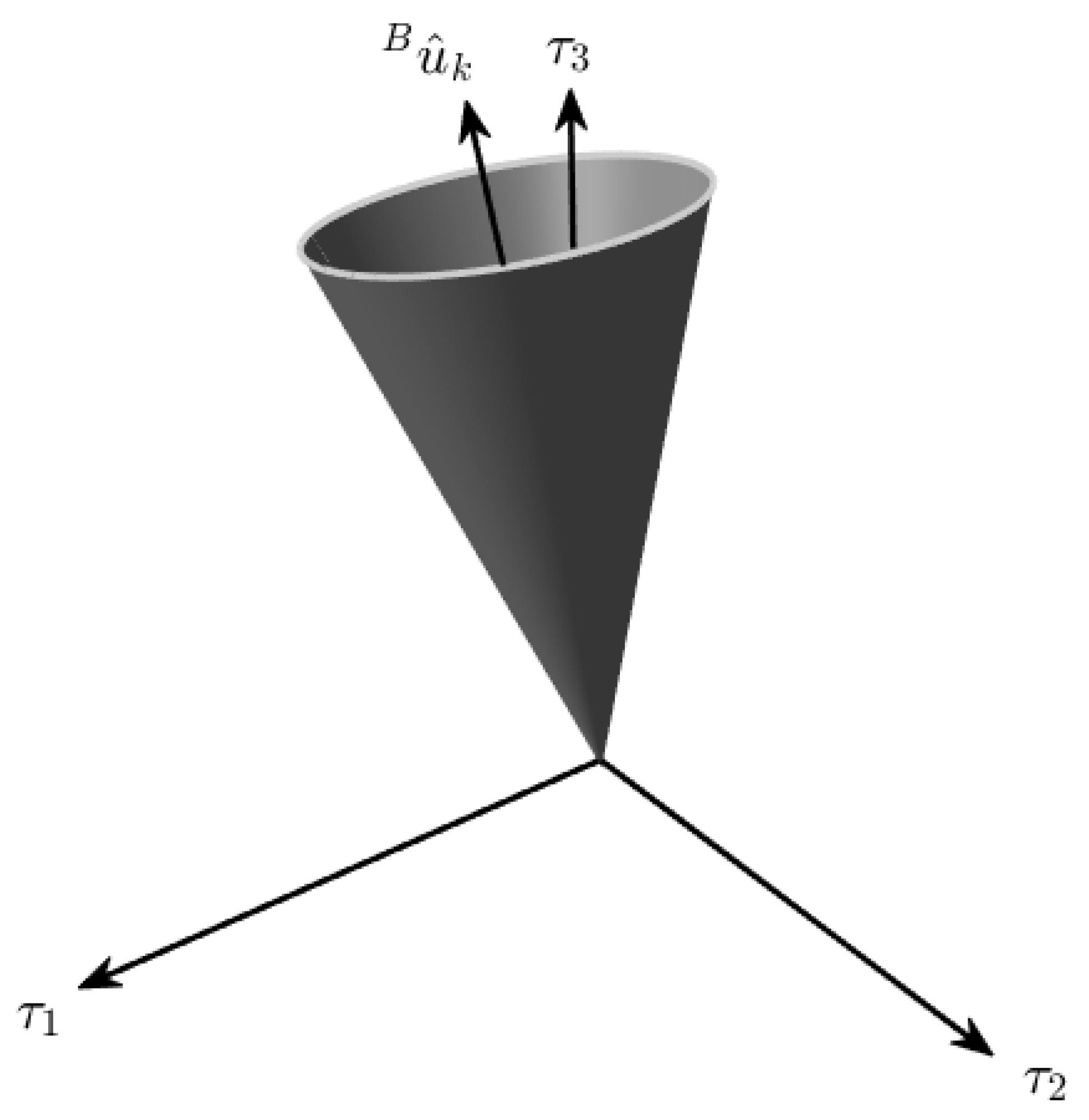
- Case 1: A thruster lies inside the delta-v cone.
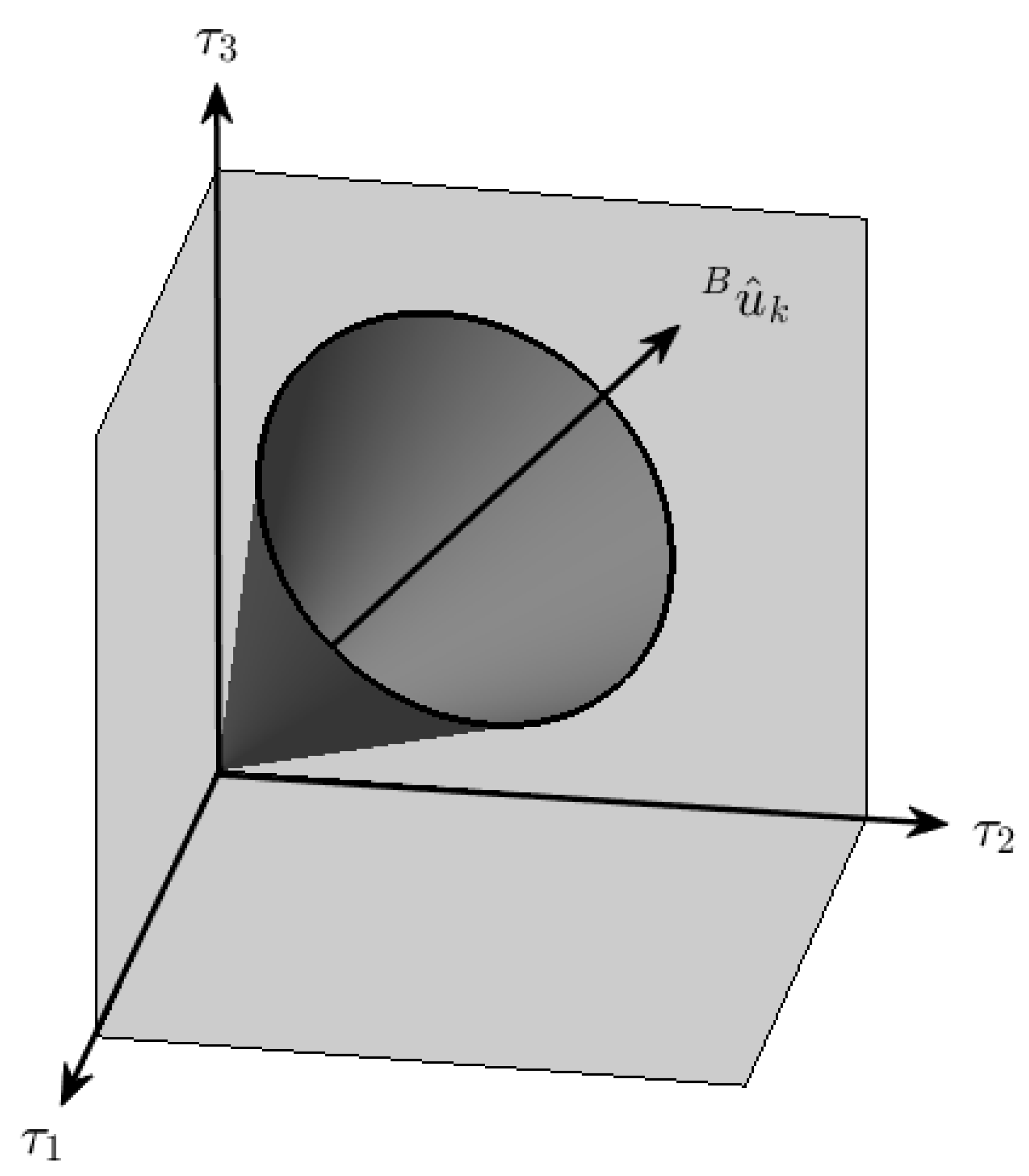
- Case 2: The delta-v cone does not include a thruster and does not touch any plane formed by any two orthogonal thrusters.
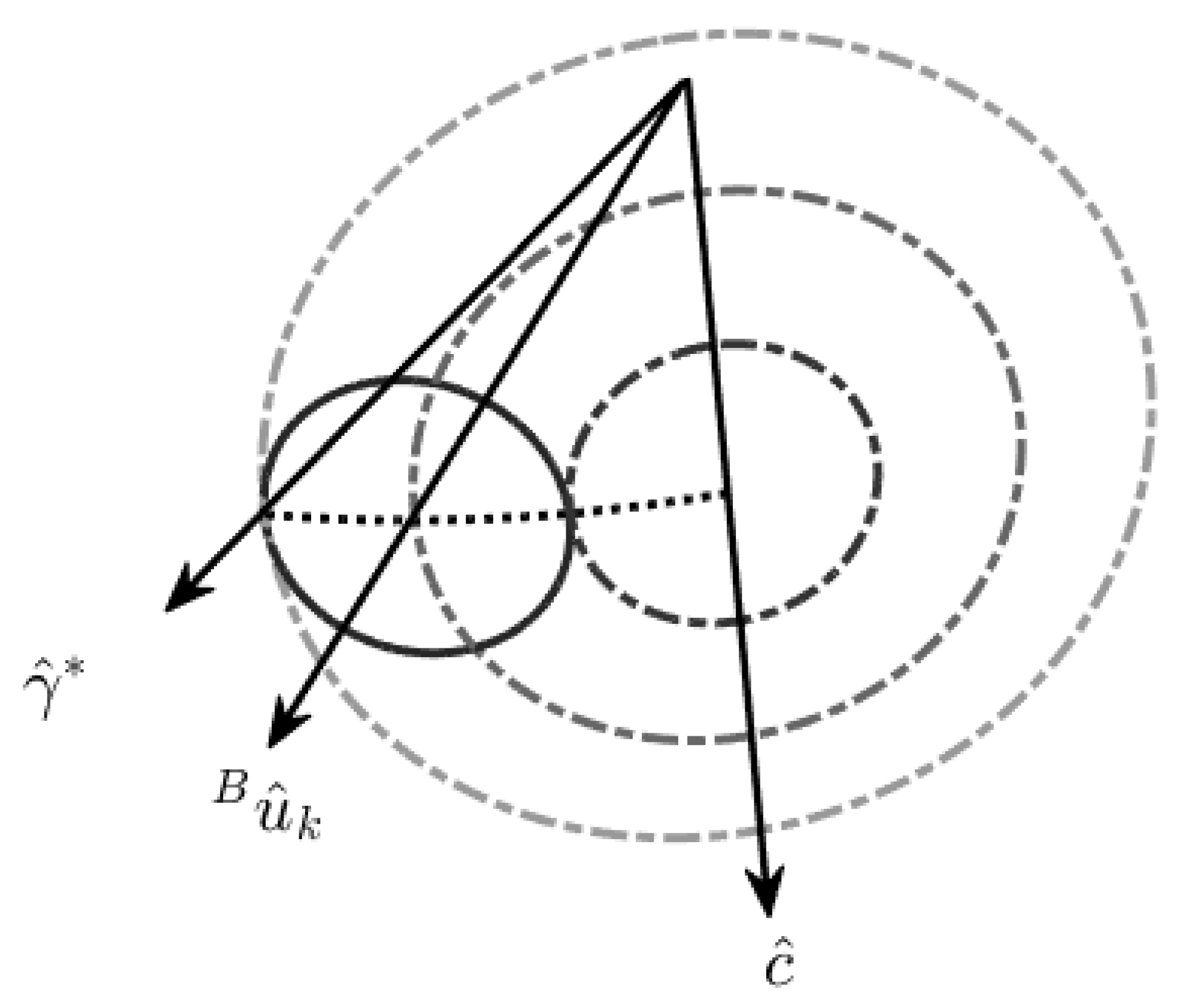
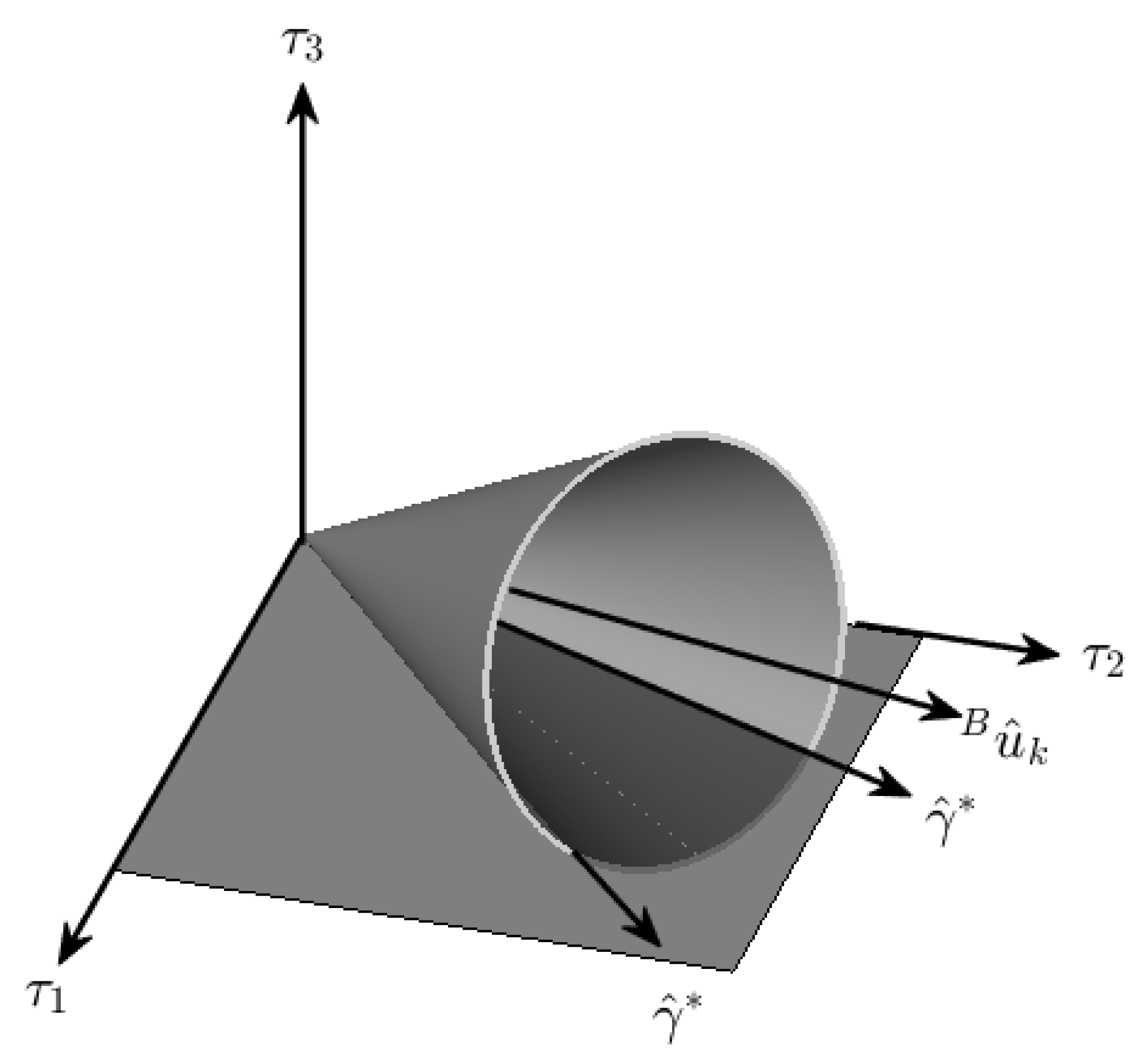
- Case 3: The delta-v cone intersects with a plane formed by two orthogonal thrusters.
4.2.1. Case 1
4.2.2. Case 2
4.2.3. Case 3
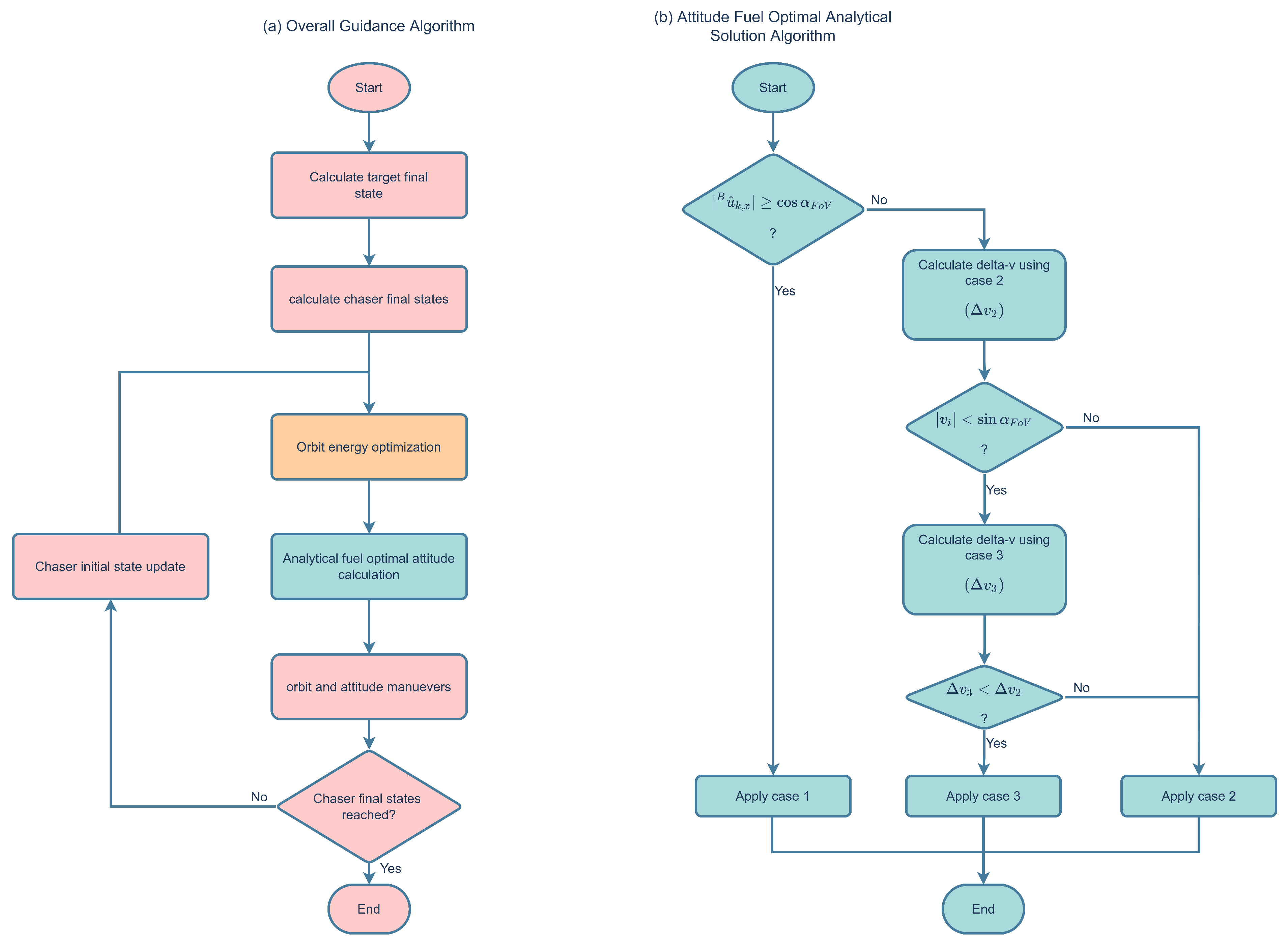
4.3. Guidance Optimization Algorithm
- Using the target’s initial attitude and body rates, its final attitude is obtained by integrating its dynamics and kinematics equations of motion.
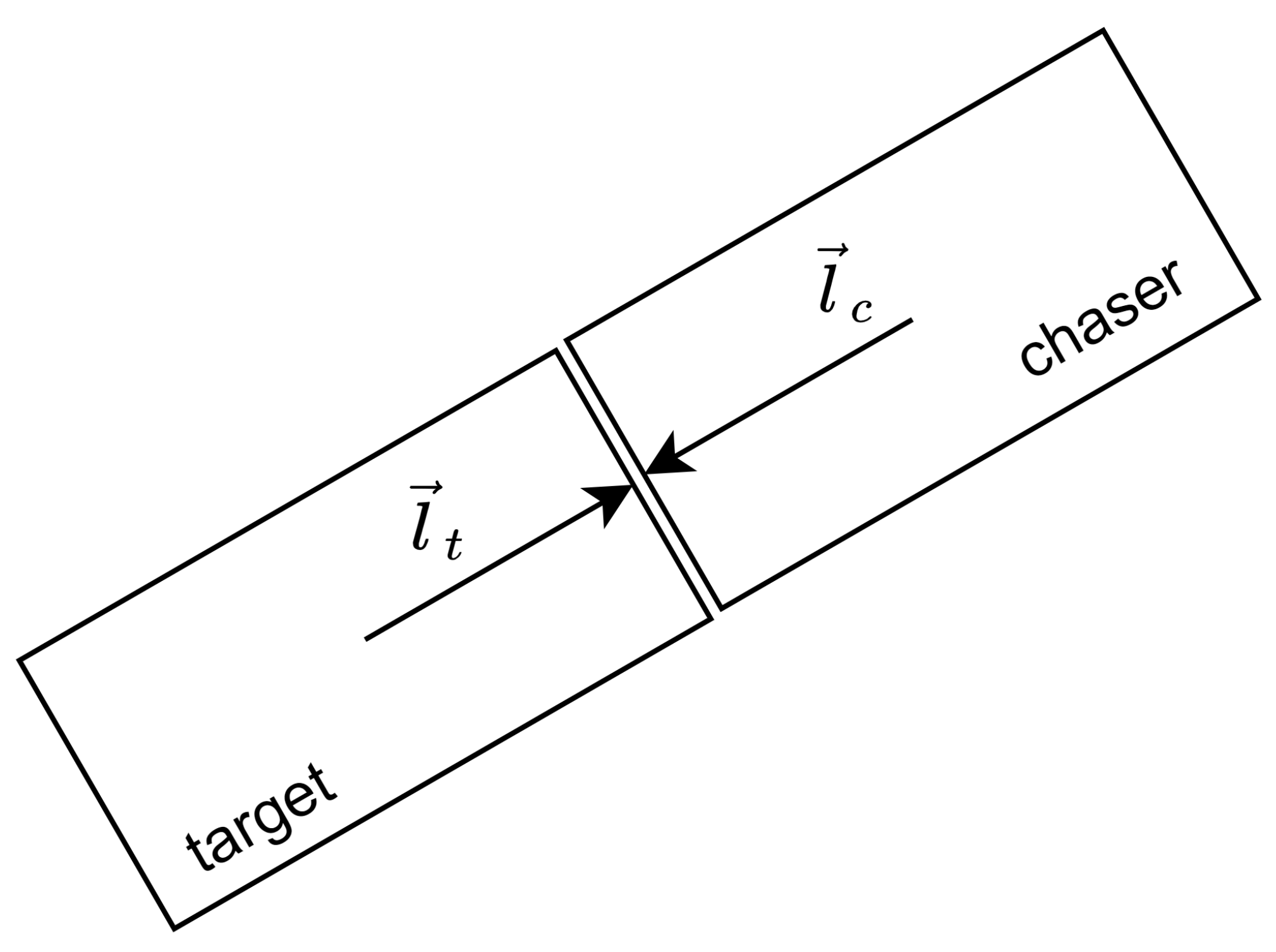
- The chaser’s final position is determined from the target’s final attitude by matching the docking ports.
- Using the initial and final conditions, an energy-minimizing orbit trajectory is generated without considering safe distance constraints.
- The position at each thruster burn interval is used to linearize the safe distance constraints.
- Using the initial and final conditions, an energy-minimizing orbit trajectory is generated while considering the safe distance constraints.
- For the first thruster burn point, a fuel-optimal attitude is solved analytically by considering the field-of-view constraint.
- Attitude and orbit maneuvers are performed at the first thruster burn interval. Then, the current state is used as the initial state, the current position trajectory is used to linearize the next trajectory, and step (2) is performed until the N-th interval has been completed.
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RVD | Rendezvous and docking |
| MPC | Model predictive control |
| LQC | Linear quadratic control |
| LEO | Low Earth orbit |
| STM | State transition matrix |
References
- Boyarko, G.; Yakimenko, O.; Romano, M. Optimal rendezvous trajectories of a controlled spacecraft and a tumbling object. J. Guid. Control Dyn. 2011, 34, 1239–1252. [Google Scholar] [CrossRef]
- Ventura, J. Fast and Near-Optimal Guidance for Docking to Uncontrolled Spacecraft. J. Guid. Control Dyn. 2017, 40, 3138–3154. [Google Scholar] [CrossRef]
- Sanchez, J.C.; Gavilan, F.; Vazquez, R.; Louembet, C. A flatness-based predictive controller for six-degrees of freedom spacecraft rendezvous. Acta Astronaut. 2020, 167, 391–403. [Google Scholar] [CrossRef] [Green Version]
- Hu, Q.; Xie, J.; Liu, X. Trajectory optimization for accompanying satellite obstacle avoidance. Aerosp. Sci. Technol. 2018, 82–83, 220–233. [Google Scholar] [CrossRef]
- Murtazin, R.; Sevastiyanov, N.; Chudinov, N. Fast rendezvous profile evolution: From ISS to lunar station. Acta Astronaut. 2020, 173, 139–144. [Google Scholar] [CrossRef]
- Breger, L.; How, J.P. Safe trajectories for autonomous rendezvous of spacecraft. J. Guid. Control Dyn. 2008, 31, 1478–1489. [Google Scholar] [CrossRef]
- Li, Q.; Yuan, J.; Zhang, B.; Gao, C. Model predictive control for autonomous rendezvous and docking with a tumbling target. Aerosp. Sci. Technol. 2017, 69, 700–711. [Google Scholar] [CrossRef]
- Zagaris, C.; Park, H.; Virgili-Llop, J.; Zappulla, R.; Romano, M.; Kolmanovsky, I. Model predictive control of spacecraft relative motion with convexified keep-out-zone constraints. J. Guid. Control Dyn. 2018, 41, 2054–2062. [Google Scholar] [CrossRef]
- Lu, P.; Liu, X. Autonomous trajectory planning for rendezvous and proximity operations by conic optimization. J. Guid. Control Dyn. 2013, 36, 375–389. [Google Scholar] [CrossRef]
- Moon, G.H.; Lee, B.Y.; Tahk, M.J.; Shim, D.H. Quaternion based attitude control and suboptimal rendezvous guidance on satellite proximity operation. In Proceedings of the 2016 European Control Conference, ECC 2016, Aalborg, Denmark, 29 June–1 July 2016. [Google Scholar] [CrossRef]
- Wu, Y.; Cao, X.; Xing, Y.; Zheng, P.; Zhang, S. Relative motion decoupled control for spacecraft formation with coupled translational and rotational dynamics. In Proceedings of the 2009 International Conference on Computer Modeling and Simulation, ICCMS 2009, Macau, China, 20–22 February 2009. [Google Scholar] [CrossRef]
- Zappulla, R.; Park, H.; Virgili-Llop, J.; Romano, M. Real-Time Autonomous Spacecraft Proximity Maneuvers and Docking Using an Adaptive Artificial Potential Field Approach. IEEE Trans. Control Syst. Technol. 2019, 27, 2598–2605. [Google Scholar] [CrossRef]
- Samsam, S.; Chhabra, R. Multi-impulse Shape-based Trajectory Optimization for Target Chasing in On-orbit Servicing Missions. In Proceedings of the 2021 IEEE Aerospace Conference (50100), Big Sky, MT, USA, 6–13 March 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–11. [Google Scholar] [CrossRef]
- Di Cairano, S.; Park, H.; Kolmanovsky, I. Model predictive control approach for guidance of spacecraft rendezvous and proximity maneuvering. Int. J. Robust Nonlinear Control 2012, 22, 1398–1427. [Google Scholar] [CrossRef] [Green Version]
- Sidi, M.J. Spacecraft Dynamics and Control: A Practical Engineering Approach; Cambridge Aerospace Series; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar] [CrossRef]
- Melton, R.G. Time-explicit representation of relative motion between elliptical orbits. J. Guid. Control Dyn. 2000, 23, 604–610. [Google Scholar] [CrossRef]
- Shuster, M.D. Survey of attitude representations. J. Astronaut. Sci. 1993, 41, 439–517. [Google Scholar]
- Andersen, E.D.; Andersen, K.D. The Mosek Interior Point Optimizer for Linear Programming: An Implementation of the Homogeneous Algorithm. In High Performance Optimization; Springer: Boston, MA, USA, 2000; pp. 197–232. [Google Scholar] [CrossRef]
- Sturm, J.F. Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric cones. Optim. Methods Softw. 1999, 11, 625–653. [Google Scholar] [CrossRef]
- Toh, K.; Tütüncü, R.; Todd, M. SDPT3—A Matlab software package for semidefinite-quadratic-linear programming. Optim. Methods Softw. 1999, 11, 545–581. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1. 2014. Available online: http://cvxr.com/cvx (accessed on 14 June 2021).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| chaser and target dimensions | m | [5, 10, 15]’ |
| chaser docking port | [1, 0, 0]’ | |
| target docking port | [1, 0, 0]’ | |
| camera vector | [1, 0, 0]’ | |
| initial body rate of target | rad/s | [1.5, 1.5, 1.5]’ |
| initial body rate of chaser | rad/s | [0, 0, 0]’ |
| initial velocity of chaser | m/s | [0, 0, 0]’ |
| initial attitude of chaser | [1, 0, 0, 0]’ | |
| initial attitude of target | [0.5, 0.5, 0.5, 0.5]’ | |
| half-angle field of view | degrees | 20 |
| maximum delta-v | m/s | 0.37 |
| duration | seconds | 200 |
| number of thruster burns | 20 | |
| mass of target | kg | 6 |
| moment of inertia of target | kg·m2 | |
| mass of chaser | kg | 6 |
| moment of inertia of chaser | kg·m2 | |
| altitude | km | 400 |
| reaction wheel maximum torque | mNm | 2.3 |
| reaction wheel momentum storage | mNms | 30.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oumer, A.M.; Kim, D.-K. Real-Time Fuel Optimization and Guidance for Spacecraft Rendezvous and Docking. Aerospace 2022, 9, 276. https://doi.org/10.3390/aerospace9050276
Oumer AM, Kim D-K. Real-Time Fuel Optimization and Guidance for Spacecraft Rendezvous and Docking. Aerospace. 2022; 9(5):276. https://doi.org/10.3390/aerospace9050276
Chicago/Turabian StyleOumer, Ahmed Mehamed, and Dae-Kwan Kim. 2022. "Real-Time Fuel Optimization and Guidance for Spacecraft Rendezvous and Docking" Aerospace 9, no. 5: 276. https://doi.org/10.3390/aerospace9050276
APA StyleOumer, A. M., & Kim, D. -K. (2022). Real-Time Fuel Optimization and Guidance for Spacecraft Rendezvous and Docking. Aerospace, 9(5), 276. https://doi.org/10.3390/aerospace9050276