
The PAPI Lights-Based Vision System for Aircraft Automatic Control during Approach and Landing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The PAPI Light System
3. The Aircraft and the Flight Control System Used in Tests
- The vision system (VS)—provides information on the aircraft’s vertical position relative to the desired glide path, as defined by the PAPI light system; this information is the result of the PAPI light image-processing (the image is acquired by the onboard video camera).
- The automatic landing system (ALS)—controls the flight with the use of control algorithms, based on fuzzy logic and expert knowledge. Moreover, it either uses the traditional autopilot’s attitude and speed stabilization functions or utilizes the autopilot as an interface for direct actuator control (Figure 3).
4. Determination of Vertical Deviation
5. Algorithms of Automatic Aircraft Landing
- for inputs:
- and for outputs:
- Rule 1.
- IF (SP IS on path) AND (H IS high) THEN (θd IS negative small)
- Rule 2.
- IF (SP IS over path) AND (H IS high) THEN (θd IS negative)
- Rule 3.
- IF (SP IS below path) AND (H IS high) THEN (θd IS zero)
- Rule 4.
- IF (SP IS high over path) AND (H IS high) THEN (θd IS negative big)
- Rule 5.
- IF (SP IS low below path) AND (H IS high) THEN (θd IS positive small) (δT IS big)
- Rule 6.
- IF (SP IS NOT low below path) AND (U IS correct) AND (H IS NOT very low) THEN (δT IS small)
- Rule 7.
- IF (SP IS NOT low below path) AND (U IS small) AND (H IS NOT very low) THEN (δT IS medium)
- Rule 8.
- IF (SP IS NOT low below path) AND (U IS high) AND (H IS NOT very low) THEN (δT IS very small)
- Rule 9.
- IF (SP IS NOT low below path) AND (U IS small) AND (H IS NOT very low) THEN (δT IS very big)
- Rule 10.
- IF (SP IS NOT low below path) AND (U IS high) AND (H IS NOT very low) THEN (δT IS very small)
- Rule 11.
- IF (H IS very low) THEN (θd IS negative small)
- Rule 12.
- IF (H IS very low) THEN (θd IS zero) (δT IS very small)
6. Example Simulation Results
6.1. Tests of PAPI Light Indication and Interpretation Algorithms
- An embedded computer, based on a quad-core processor with a 256-core GPU graphics chip, managed by a real-time operating system (including a built-in compiler, debugger, and system libraries containing the basic functions and algorithms for image-processing and calculation support), a quad-core ARM processor with a 256-core GPU graphics chip that allows parallel computing (a Jetson TX1 computer, based on NVIDIA Maxwell architecture, was used as a hardware platform, while Linux Ubuntu 16.04 LTS is the operating system),
- A video camera maintaining variable lighting conditions, characterized by the following parameters: 4K resolution, 155-degree view angle, and picture stabilization mechanism (FPV Foxeer Legend 3).
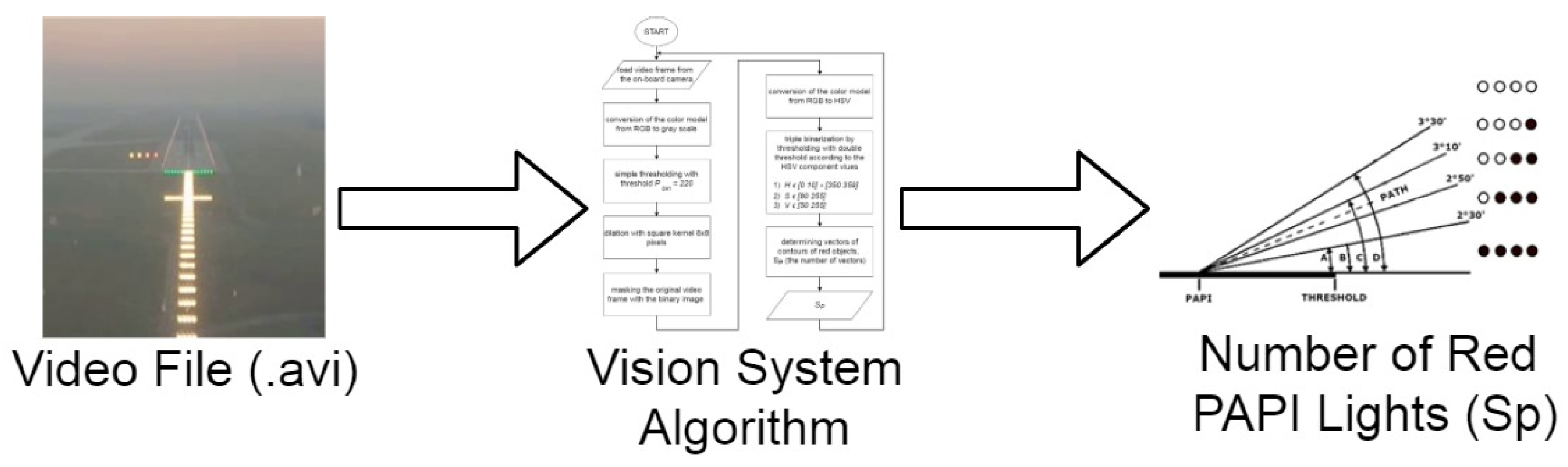
- The pilot landed the experimental aircraft in a series of real, dedicated flights using PAPI lights, and a movie capturing a PAPI image in *.avi format was recorded.
- The vision system algorithm processed the movie offline, but the real-time of both the video replay and the calculations were kept.
- The output information generated by the vision algorithms, i.e., the number of detected red lights, was compared with the real frames of PAPI lights in the movie.
6.2. Tests Campaigns of the Aircraft Automatic Landing Control Algorithms
- A computer with software executing both picture-processing functions and fuzzy control algorithms. A video signal was acquired by the USB interface. The calculated deviation of the aircraft position from the desired glide path was transmitted to the autopilot via an RS-232 interface.
- An autopilot—the real autopilot module that originated from the test airplane (Figure 2).
- The xPlane-based flight simulator environment, simulating aircraft dynamics and generating the picture of the PAPI lights.
- A video camera—this closes the loop by acquiring a picture of the PAPI lights and transmitting it to the vision system.
- A data recorder, recording the data from the internal CAN bus.
- The vision system (VS), executing picture-processing algorithms. It captured the video signal CSI-2 interface and transmitted the calculated vertical deviation of the aircraft position from the desired flight trajectory to the automatic landing system via the RS-232 interface.
- The automatic landing system (ALS), executing fuzzy logic algorithms maintaining the landing phase. The ALS generated the desired pitch angle θd, stabilized by an autopilot in one channel, and directly controlled the throttle level position δT in another channel (Figure 3).
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Stevens, B.L.; Lewis, F.L. Aircraft Control and Simulation. Aircr. Eng. Aerosp. Technol. 2004, 76, 5. [Google Scholar] [CrossRef] [Green Version]
- Vepa, R. Flight Dynamics, Simulation, and Control for Rigid and Flexible Aircraft; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar] [CrossRef]
- Kundu, A.K.; Price, M.A.; Riordan, D. Theory and Practice of Aircraft Performance; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Kopecki, G. Analysis of Control Quality of Aircraft Lateral Motion during Approach with the Use of Different Control Laws. Aviation 2006, 10, 21–29. [Google Scholar] [CrossRef]
- Belmonte, L.M.; Morales, R.; Fernández-Caballero, A. Computer vision in autonomous unmanned aerial vehicles—A systematic mapping study. Appl. Sci. 2019, 9, 3196. [Google Scholar] [CrossRef] [Green Version]
- Sabatini, R. A Low-Cost Vision Based Navigation System for Small Size Unmanned Aerial Vehicle Applications. J. Aeronaut. Aerosp. Eng. 2013, 2, 2. [Google Scholar] [CrossRef] [Green Version]
- Gomolka, Z.; Kordos, D.; Zeslawska, E. The Application of Flexible Areas of Interest to Pilot Mobile Eye Tracking. Sensors 2020, 20, 986. [Google Scholar] [CrossRef] [Green Version]
- Wubben, J.; Fabra, F.; Calafate, C.T.; Krzeszowski, T.; Marquez-Barja, J.M.; Cano, J.-C.; Manzoni, P. Accurate Landing of Unmanned Aerial Vehicles Using Ground Pattern Recognition. Electronics 2019, 8, 1532. [Google Scholar] [CrossRef] [Green Version]
- Qingii, G.; Jian, L.; Jinning, Z. Airport PAPI Lamp Image Detection Algorithm Based on Saliency and Configuration Features. In Proceedings of the 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Kapuscinski, T.; Szczerba, P.; Rogalski, T.; Rzucidlo, P.; Szczerba, Z. Vision-Based Method for Determining Aircraft State during Spin Recovery. Sensors 2020, 20, 2401. [Google Scholar] [CrossRef]
- Oszust, M.; Kapuscinski, T.; Warchol, D.; Wysocki, M.; Rogalski, T.; Pieniazek, J.; Kopecki, G.; Ciecinski, P.; Rzucidlo, P. A vision-based method for supporting autonomous aircraft landing. Aircr. Eng. Aerosp. Technol. 2018, 90, 973–982. [Google Scholar] [CrossRef]
- Brukarczyk, B.; Nowak, D.; Kot, P.; Rogalski, T.; Rzucidło, P. Fixed Wing Aircraft Automatic Landing with the Use of a Dedicated Ground Sign System. Aerospace 2021, 8, 167. [Google Scholar] [CrossRef]
- Basmadji, F.L.; Gruszecki, J.; Rzucidlo, P.; Kordos, D. Development of ground control station for a terrain observer—Hardware in the loop simulations. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar]
- ICAO. ICAO Annex 14 to the Convention on International Civil Aviation Aerodromes, 8th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2018; ISBN 978-92-9258-483-2. [Google Scholar]
- Rogalski, T.; Nowak, D.; Wałek, Ł.; Rzońca, D.; Samolej, S. Control System for Aircraft Take-off and Landing Based on Modified PID controllers. MATEC Web Conf. 2019, 252, 06008. [Google Scholar] [CrossRef] [Green Version]
- Rzonca, D.; Samolej, S.; Nowak, D.; Rogalski, T. Communication and control software development for experimental unmanned aerial system–Selected issues. In Automation 2018. Advances in Intelligent Systems and Computing; Szewczyk, R., Zieliński, C., Kaliczyńska, M., Eds.; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2018; Volume 743. [Google Scholar] [CrossRef]
- Pieniazek, J. Measurement of aircraft approach using airfield image. Meas. J. Int. Meas. Confed. 2019, 141, 396–406. [Google Scholar] [CrossRef]
- Pieniazek, J. Investigation of image based measurement for aircraft approach. In Proceedings of the 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2018. [Google Scholar] [CrossRef]
- Rzucidło, P.; Rogalski, T.; Jaromi, G.; Kordos, D.; Szczerba, P.; Paw, A. Simulation studies of a vision intruder detection system. Aircr. Eng. Aerosp. Technol. 2020, 92, 621–631. [Google Scholar] [CrossRef]
- OpenCv, OpenCV Library OpenCV Website. 2014. Available online: https://opencv.org (accessed on 31 January 2022).
- Cheng, H.-W.; Chen, T.-L.; Tien, C.-H. Motion Estimation by Hybrid Optical Flow Technology for UAV Landing in an Unvisited Area. Sensors 2019, 19, 1380. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Burlion, L.; de Plinval, H. Keeping a ground point in the camera field of view of a landing UAV. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA 2013), Karlsruhe, Germany, 6–10 May 2013. [Google Scholar] [CrossRef]
- Anitha, G.; Kumar, R.N.G. Vision based autonomous landing of an unmanned aerial Vehicle. Procedia Eng. 2012, 38, 2250–2256. [Google Scholar] [CrossRef] [Green Version]
- Fadhil, A.F.; Kanneganti, R.; Gupta, L.; Eberle, H.; Vaidyanathan, R. Fusion of Enhanced and Synthetic Vision System Images for Runway and Horizon Detection. Sensors 2019, 19, 3802. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Cheng, I.; Basu, A. Real-Time Runway Detection for Infrared Aerial Image Using Synthetic Vision and an ROI Based Level Set Method. Remote Sens. 2018, 10, 1544. [Google Scholar] [CrossRef] [Green Version]
- Olivares-Mendez, M.A.; Kannan, S.; Voos, H. Vision based fuzzy control autonomous landing with UAVs: From V-REP to real experiments. In Proceedings of the 23rd Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, 16–19 June 2015. [Google Scholar] [CrossRef]
- Bickraj, K.; Street, W.F.; Li, M.; Tansel, I.N. Fuzzy Logic Based Integrated Controller for Unmanned Aerial Vehicles. In Proceedings of the Florida Conference on Recent Advances in Robotics, Miami, FL, USA, 25–26 May 2006; Available online: https://www.researchgate.net/publication/228643261_Fuzzy_Logic_Based_Integrated_Controller_for_Unmanned_Aerial_Vehicles/citations#fullTextFileContent (accessed on 31 January 2022).
- Marcu, E. Fuzzy logic approach in real-time UAV control. J. Control Eng. Appl. Inform. 2011, 13, 12–17. [Google Scholar]
- Su, X.; Wu, Y.; Song, J.; Yuan, P. A Fuzzy Path Selection Strategy for Aircraft Landing on a Carrier. Appl. Sci. 2018, 8, 779. [Google Scholar] [CrossRef] [Green Version]
- Bandara, R.M.N.; Gaspe, S. Fuzzy logic controller design for an Unmanned Aerial Vehicle. In Proceedings of the 2016 IEEE International Conference on Information and Automation for Sustainability, Galle, Sri Lanka, 16–19 December 2016. [Google Scholar] [CrossRef]
- Nair, V.G.; Dileep, M.V.; Prahaland, K.R. Design of Fuzzy Logic Controller for Lateral Dynamics Control of Aircraft by Considering the Cross-Coupling Effect of Yaw and Roll on Each Other. Int. J. Comput. Appl. 2012, 47, 44–48. [Google Scholar] [CrossRef]
- Nowak, D.; Kopecki, G.; Orkisz, M.; Rogalski, T.; Rzucidło, P. The selected innovative solutions in UAV control systems technologies. In Innovative Control Systems for Tracked Vehicle Platforms. Studies in Systems, Decision and Control; Nawrat, M.A., Ed.; Springer: Cham, Switzerland, 2014; Volume 2. [Google Scholar] [CrossRef]























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nowak, D.; Kopecki, G.; Kordos, D.; Rogalski, T. The PAPI Lights-Based Vision System for Aircraft Automatic Control during Approach and Landing. Aerospace 2022, 9, 285. https://doi.org/10.3390/aerospace9060285
Nowak D, Kopecki G, Kordos D, Rogalski T. The PAPI Lights-Based Vision System for Aircraft Automatic Control during Approach and Landing. Aerospace. 2022; 9(6):285. https://doi.org/10.3390/aerospace9060285
Chicago/Turabian StyleNowak, Dariusz, Grzegorz Kopecki, Damian Kordos, and Tomasz Rogalski. 2022. "The PAPI Lights-Based Vision System for Aircraft Automatic Control during Approach and Landing" Aerospace 9, no. 6: 285. https://doi.org/10.3390/aerospace9060285
APA StyleNowak, D., Kopecki, G., Kordos, D., & Rogalski, T. (2022). The PAPI Lights-Based Vision System for Aircraft Automatic Control during Approach and Landing. Aerospace, 9(6), 285. https://doi.org/10.3390/aerospace9060285