
Effects on Taxiing Conflicts at Intersections by Pilots’ Sensitive Speed Adjustment


Abstract
:1. Introduction
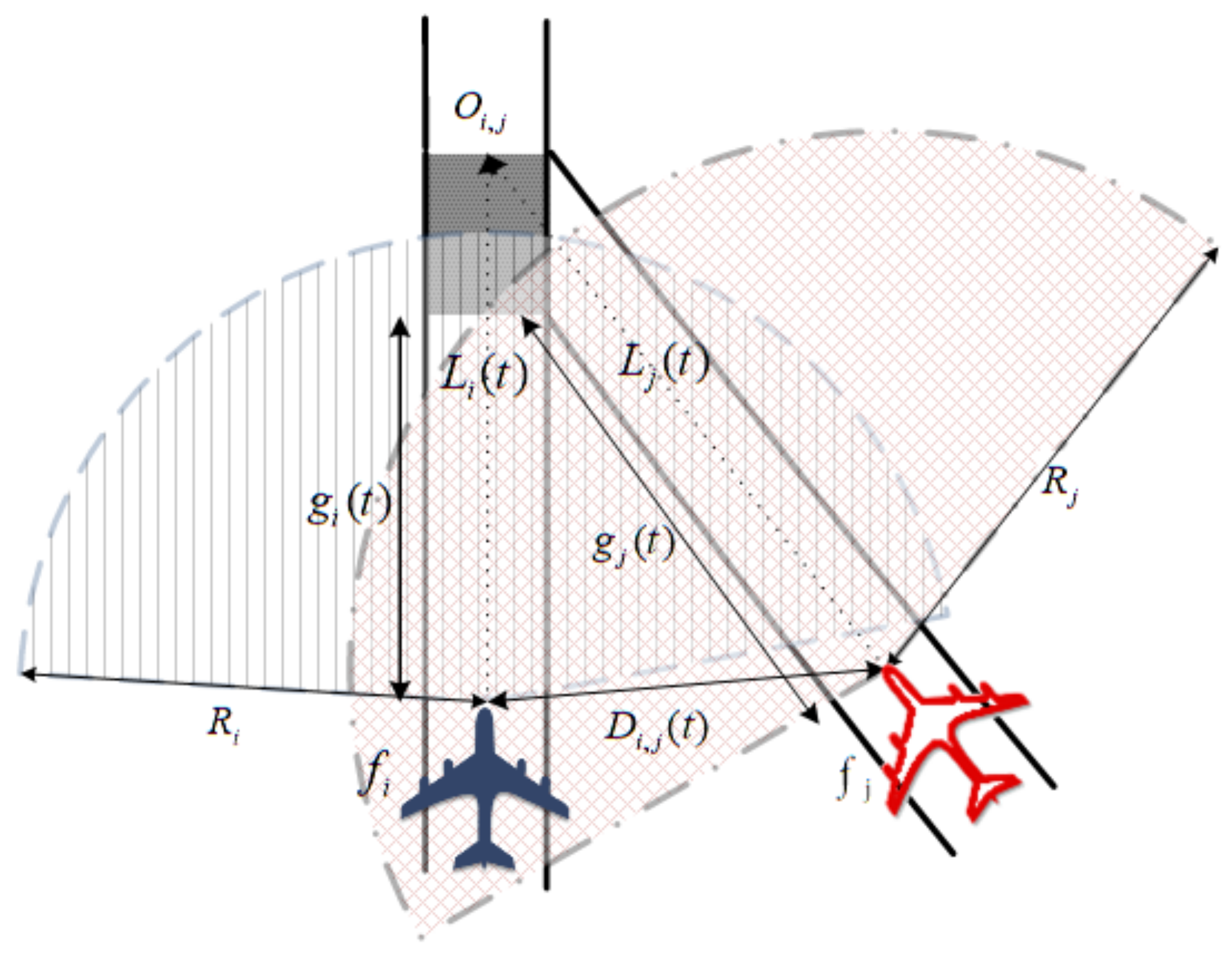
2. Rules for Visual Separation Establishment
3. Simulation Model Set-Up
3.1. Model Constraints
3.2. Proximity Rate Calculation
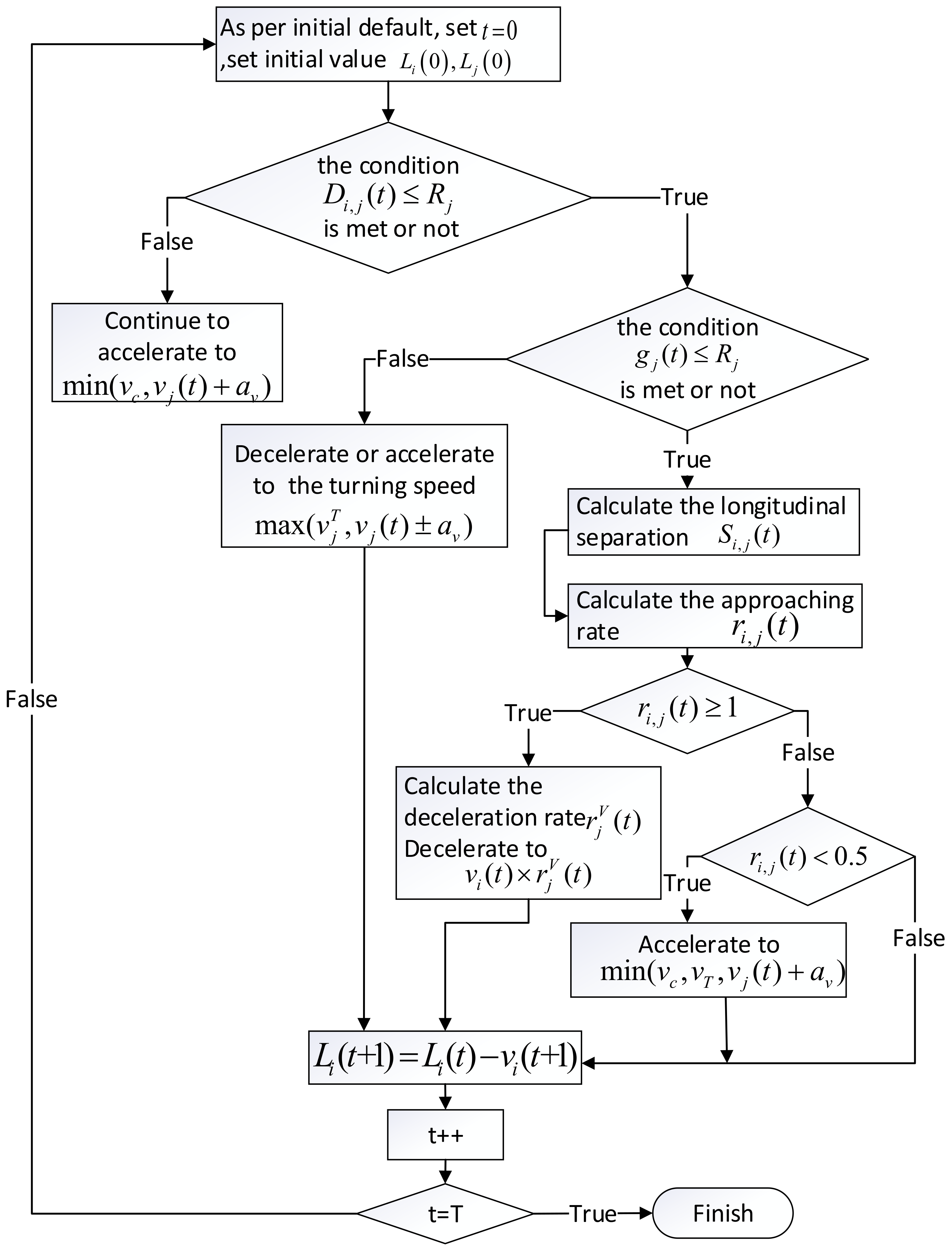
3.3. Following Aircraft Speed Adjustment
4. Model Verification
4.1. Simulation Platform Set-Up
4.2. Operation Process of Simulation Program
4.3. Experimental Conclusions
5. Discussion and Case Studies
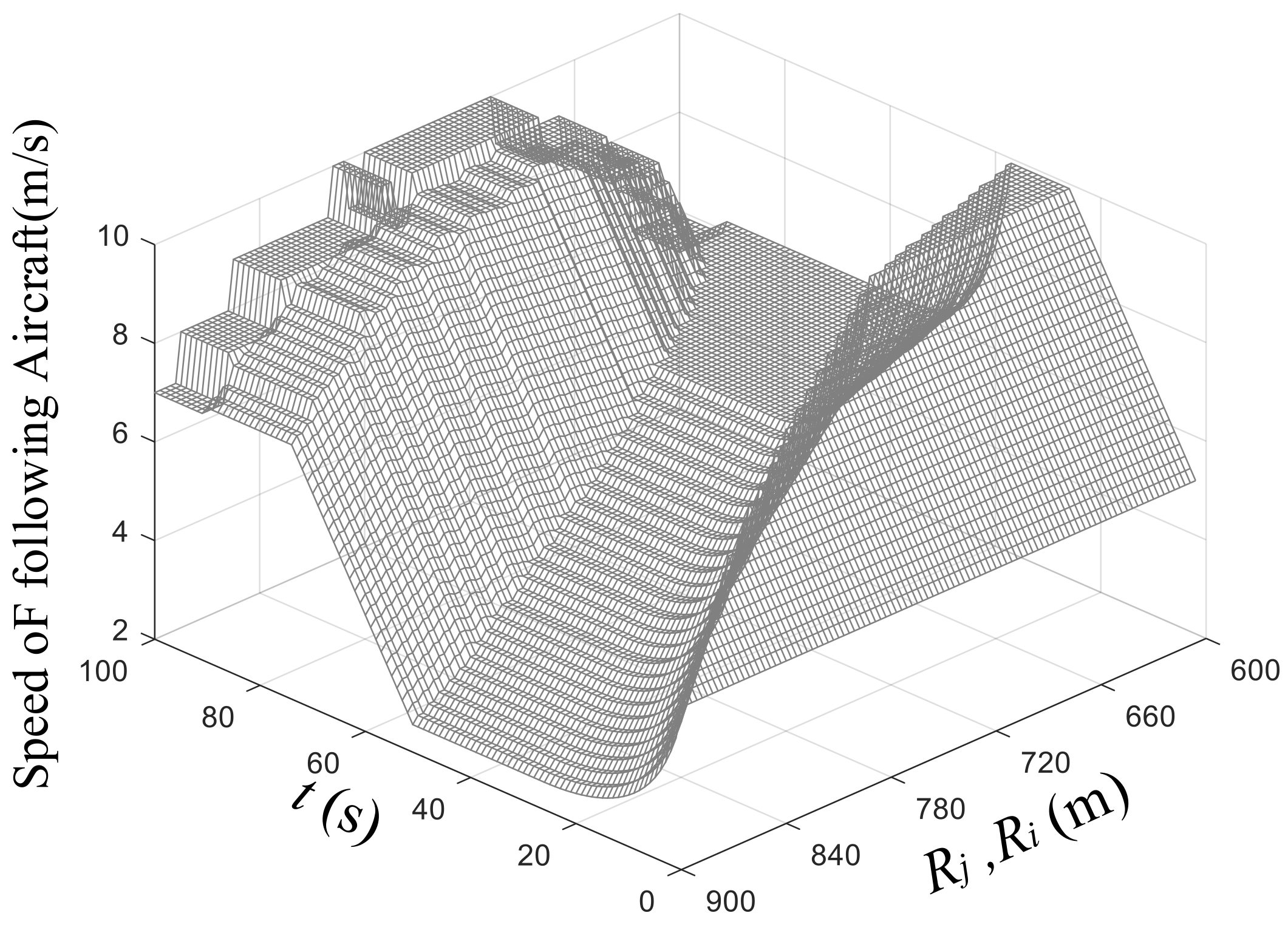
5.1. Simulation Results
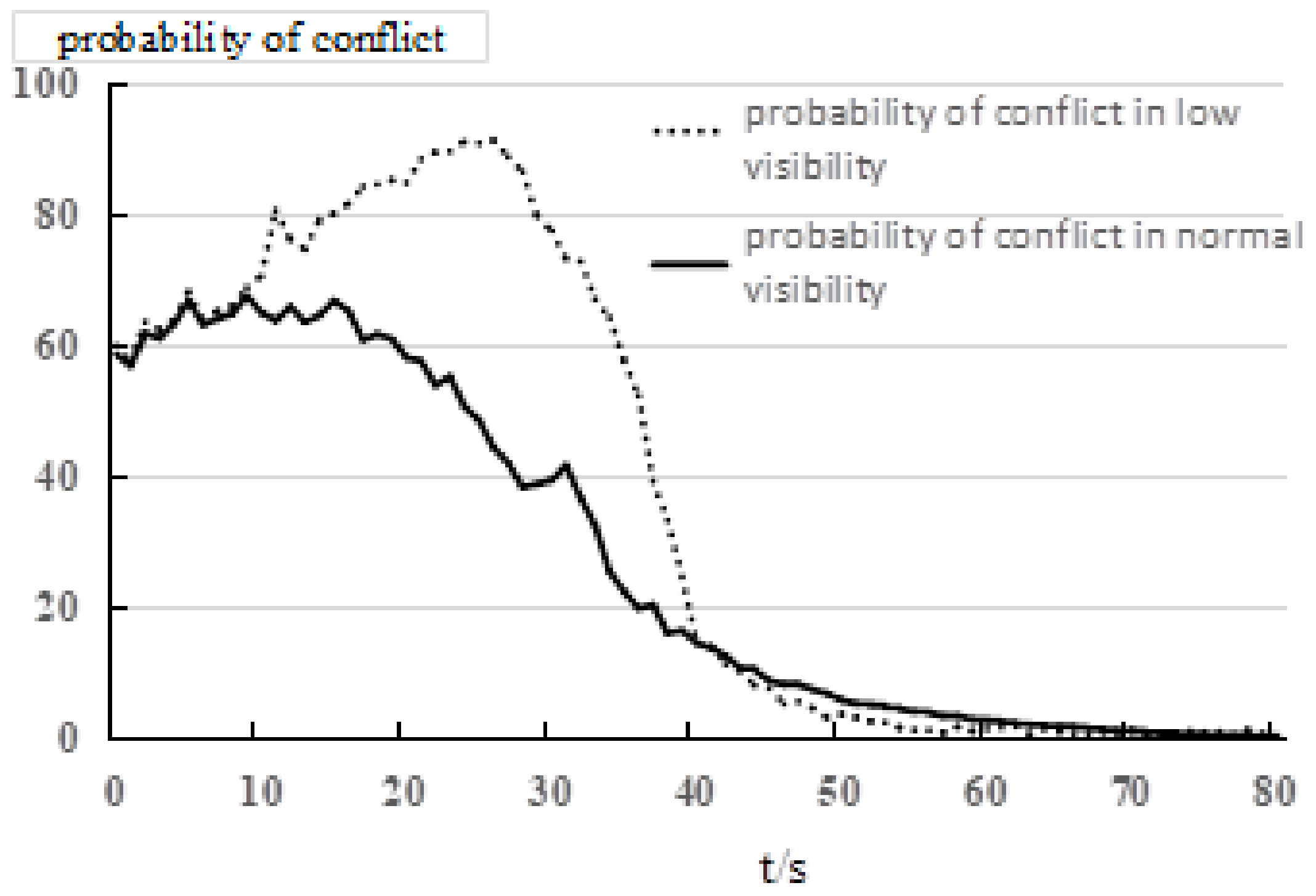
- Conflict probability can be reduced to less than 0.5 after 50 s with visual separation. The conflicts can be reduced and the safety of taxiing can be improved by observing the proceeding aircraft and establishing visual separation at intersections during taxiing proposed in this research.
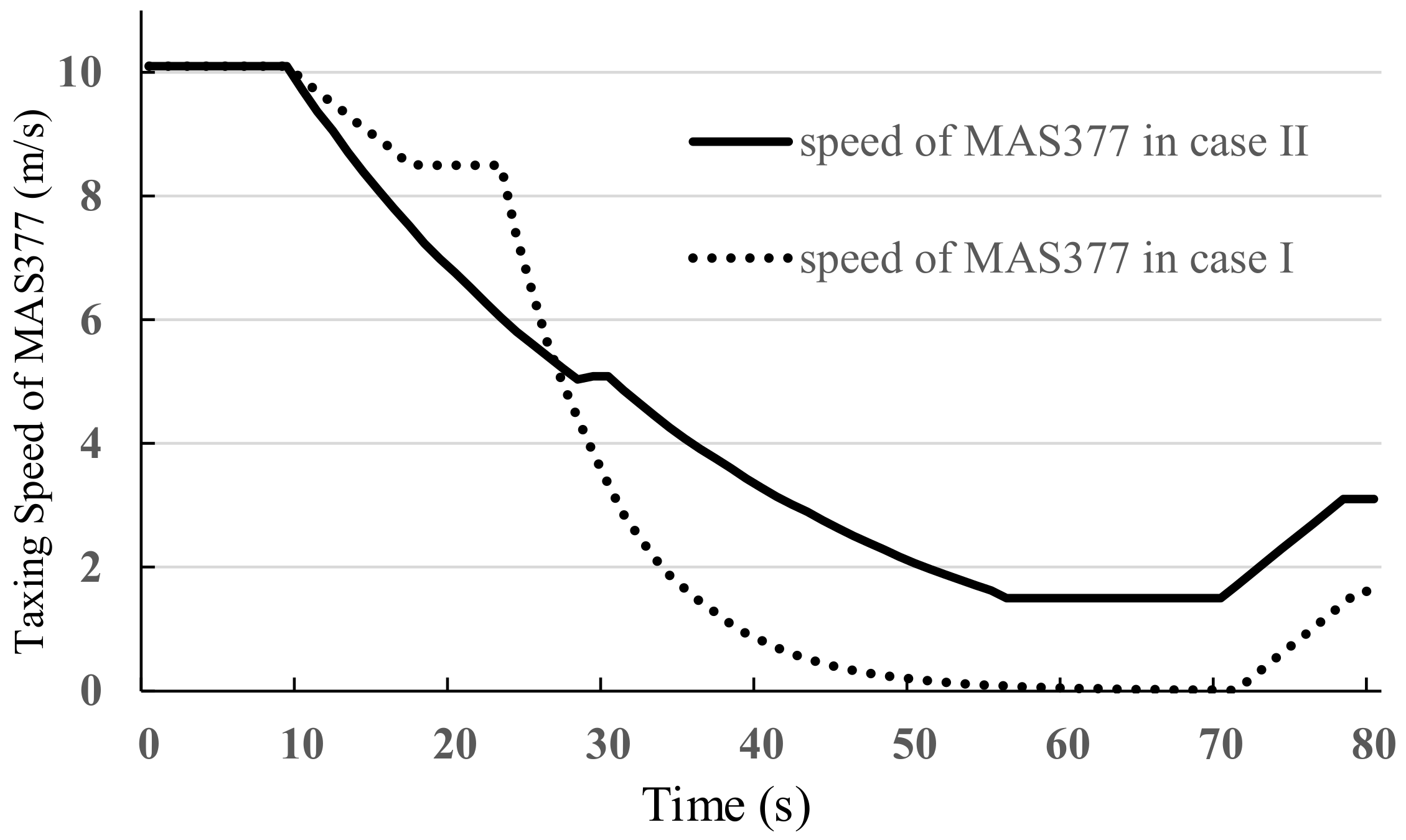
- Narrower visual range or lags in the operation of pilots can induce higher taxiing speed, with smaller horizontal separation and more conflict. Although the pilot of the following aircraft takes a long and rapid deceleration to lower the conflict probability in the later period, it would cause the fluctuation in conflict probability, poor taxiing stability and low operation efficiency.
- The relatively wide visual range and the timely operation of pilots can quickly control the separation reduction and converging taxiing situation. The speed adjustment of following aircraft is slight and infrequent and the conflict probability and taxiing process are relatively stable with relatively high operation efficiency.
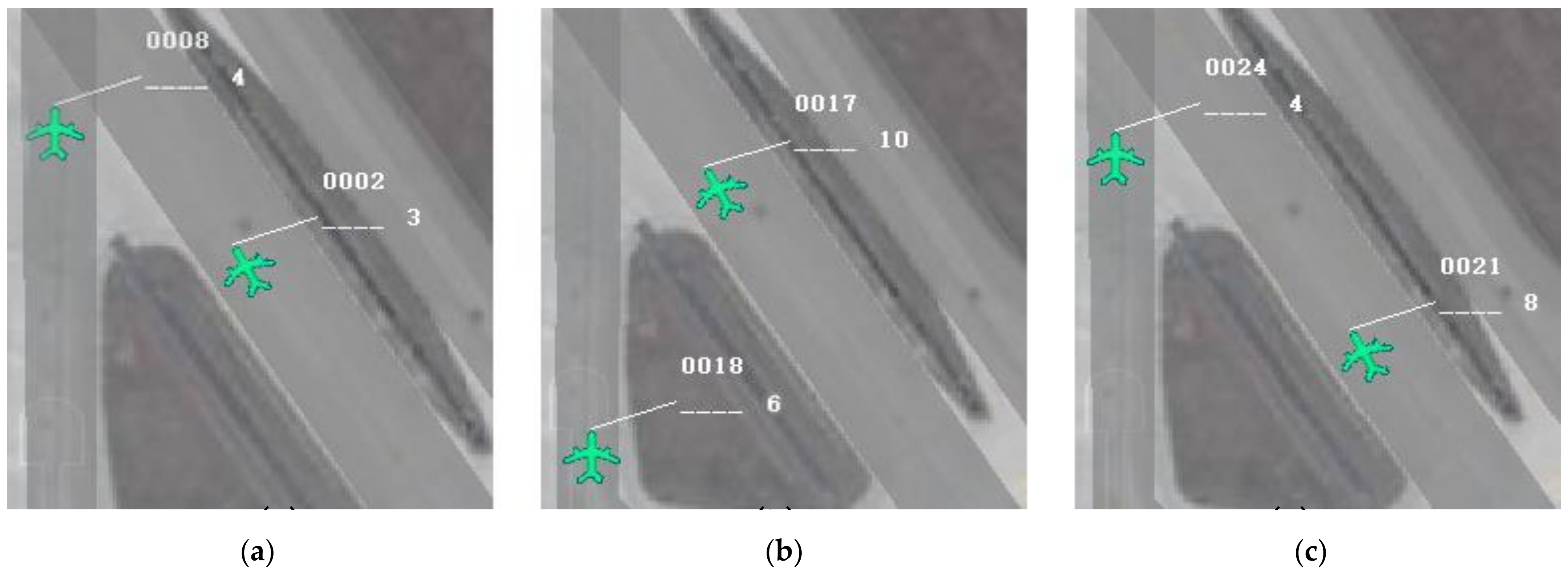
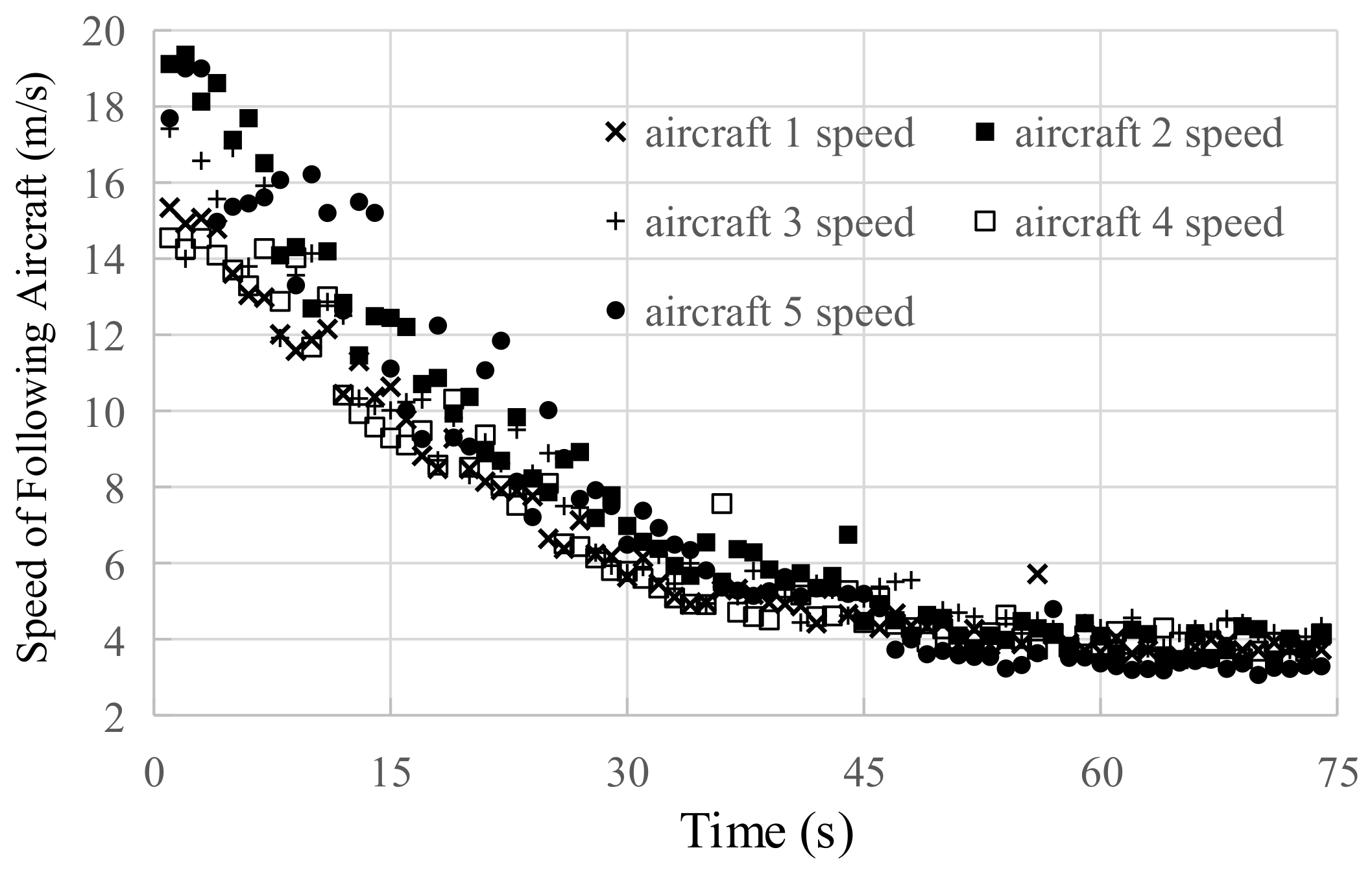
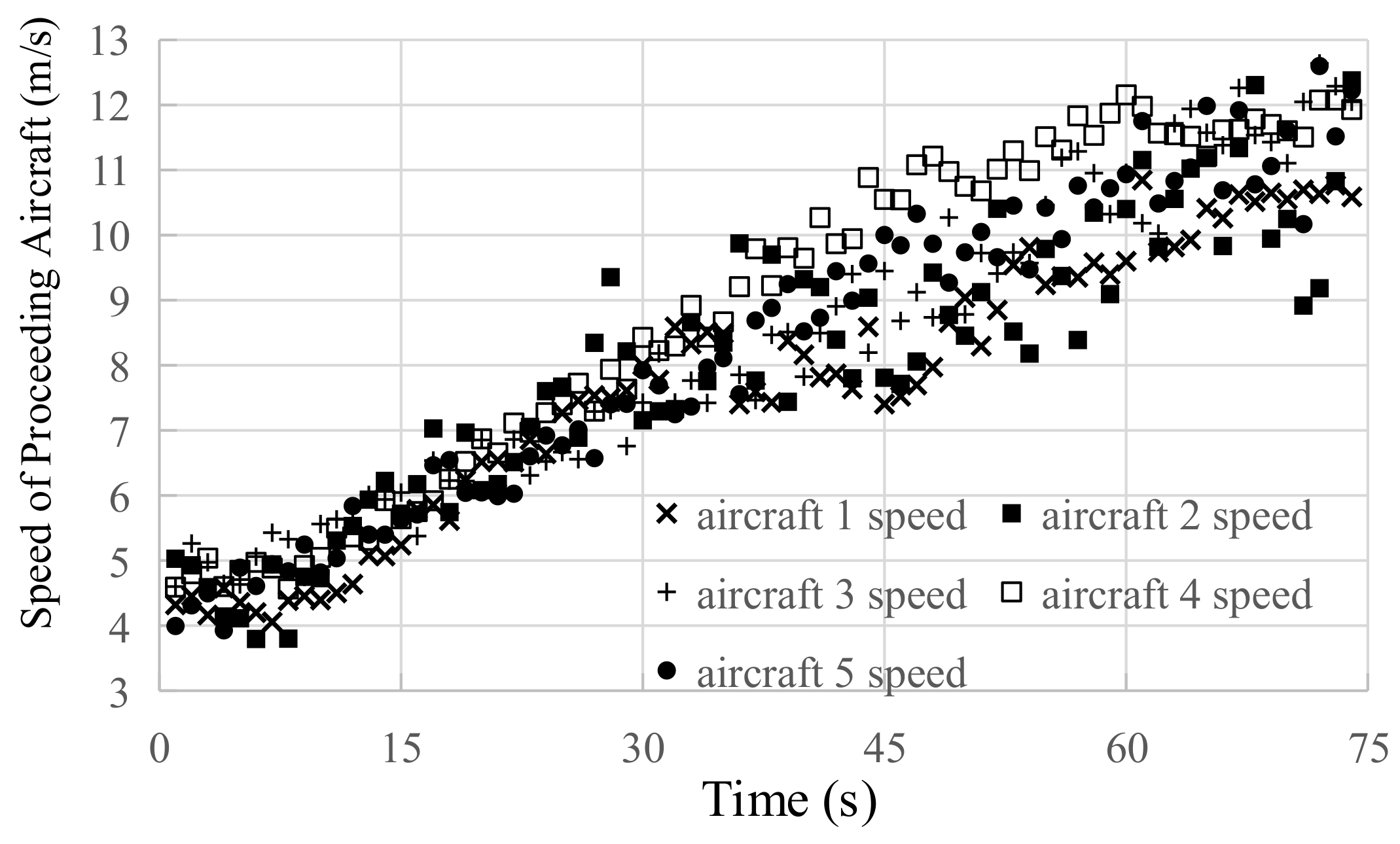
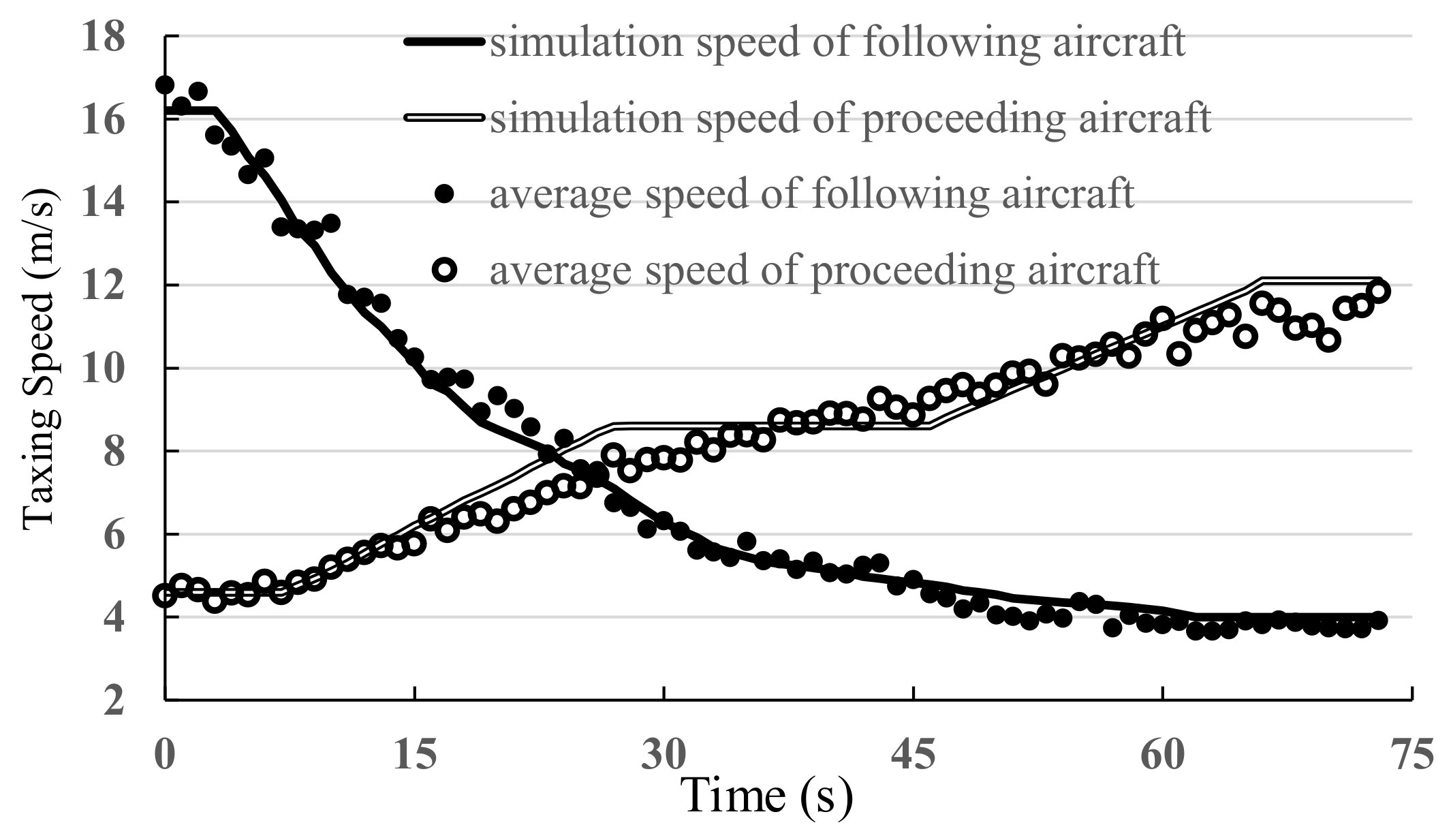
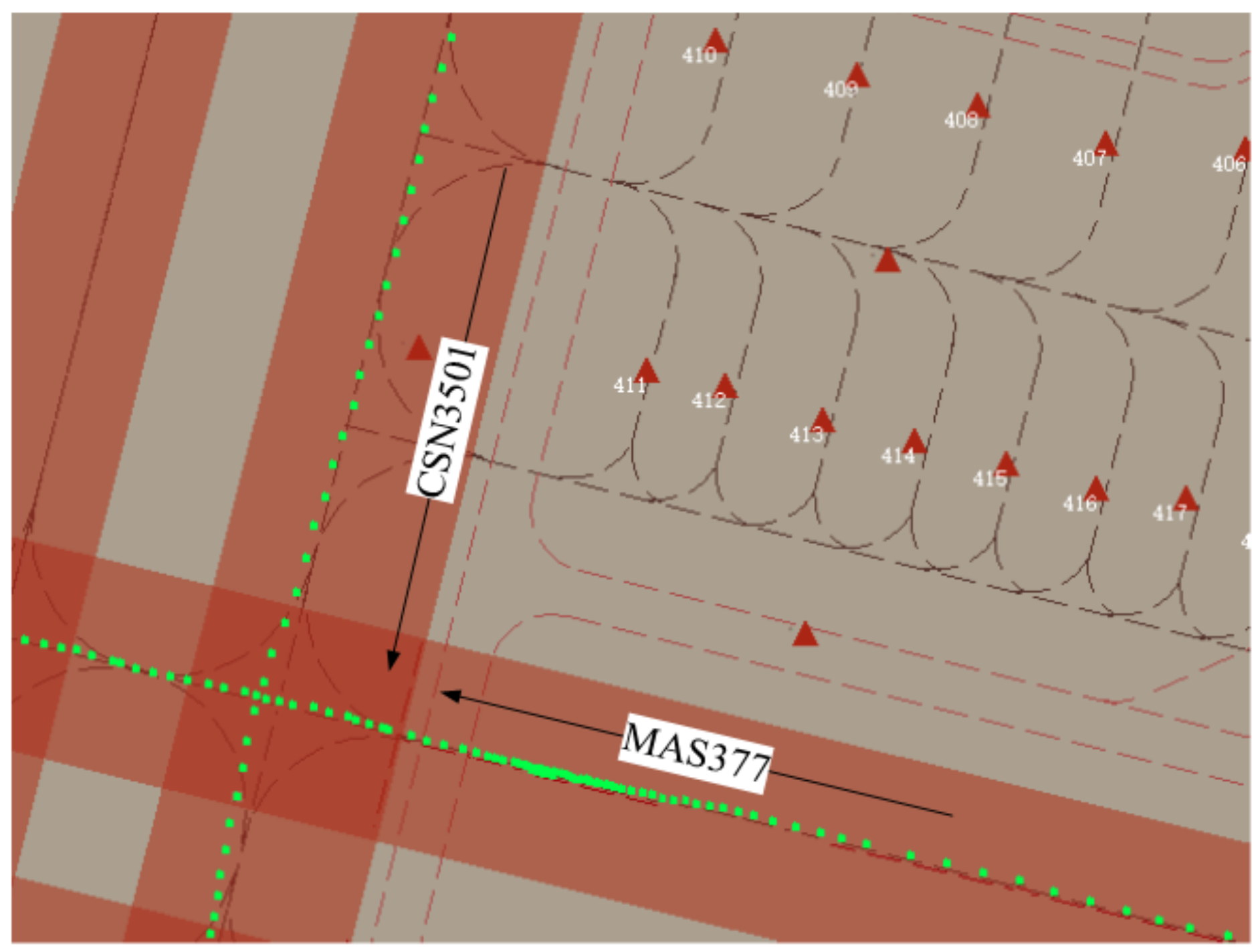
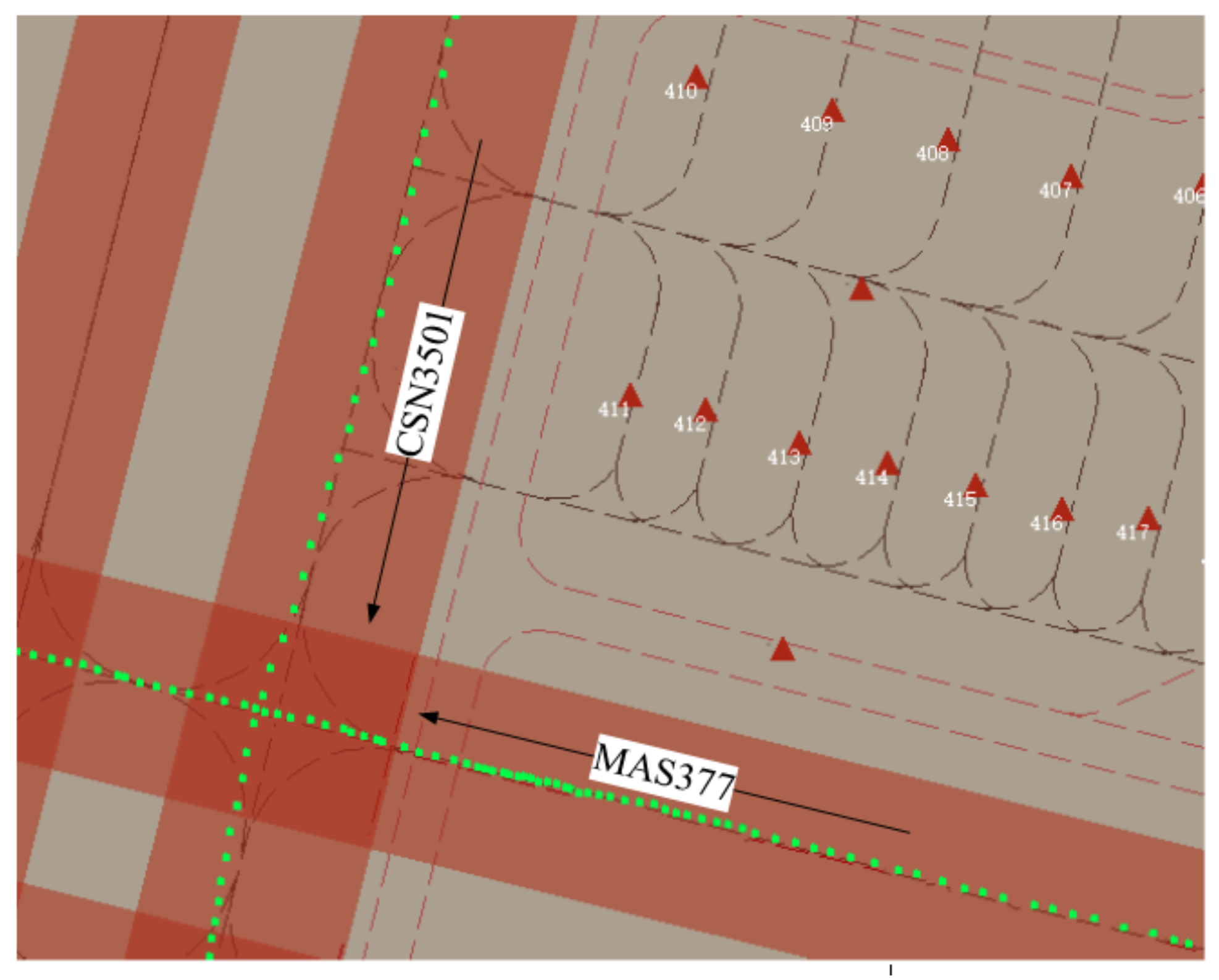
5.2. Model Validation Using Empirical Data
6. Conclusions
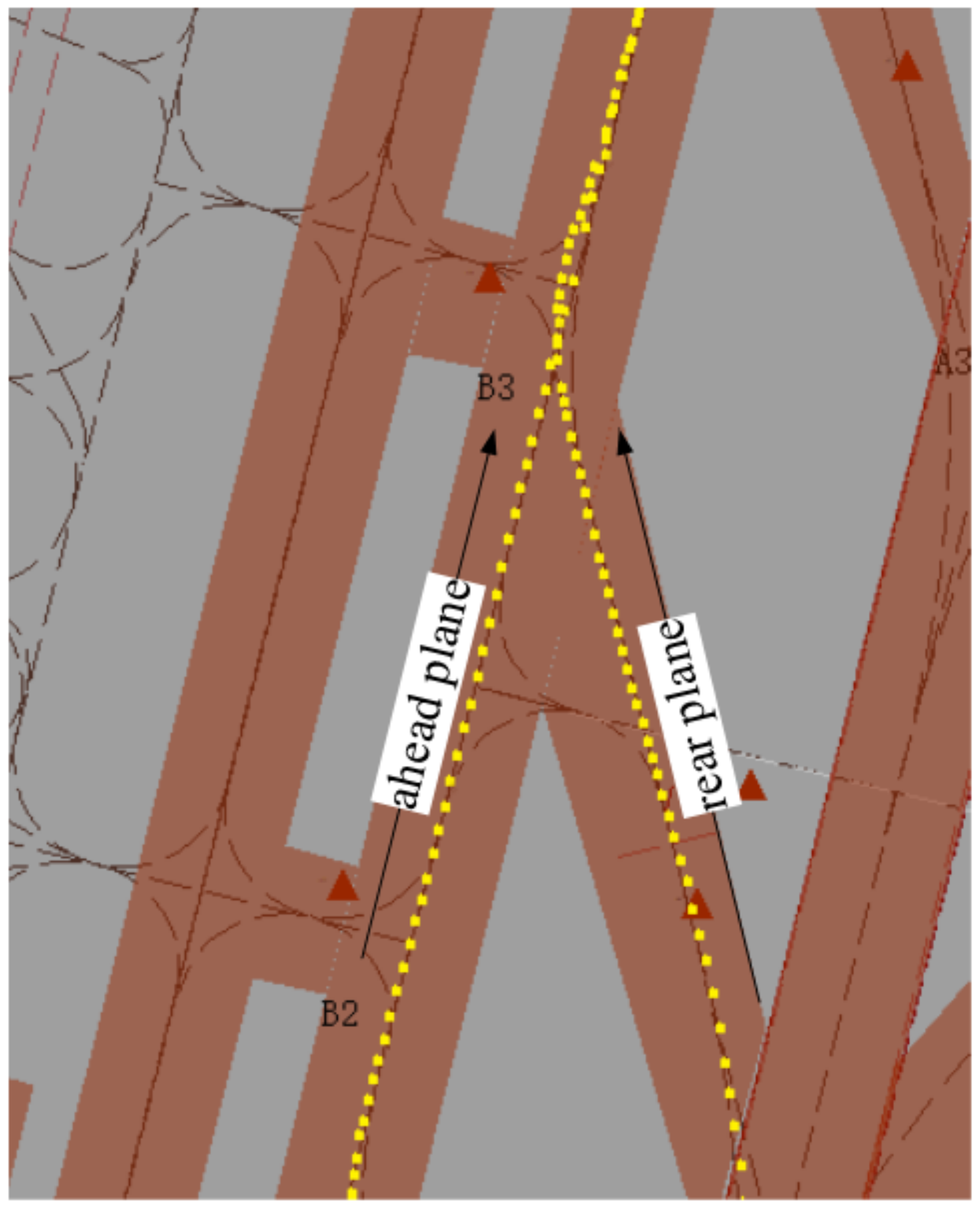
- This model can simulate the process of establishing visual separation, during which the pilots adjust aircraft taxiing speed and predict possible conflicts timely with the position of proceeding aircraft and the intersection as references.
- This model can reproduce the taxiing process during which the following aircraft decelerates and accelerates alternately to improve the operation efficiency and enhance the safety of taxiing.
- The pilots can effectively reduce the risk of conflicts and improve the safety of taxiing by observing the proceeding aircraft and intersections and then initiating the visual separation during taxiing. The pilots shall be informed of the position of proceeding aircraft by the indication of lighting system, controllers’ reminder and other means when the visual range is less than 100 m or there is occlusion. Enlarging the value of visual range on purpose can effectively reduce the conflict risk and improve taxiing stability.
- The simulation results of this model are consistent properly with the actual operation program and real trajectory. The conclusions in this paper are capable of evaluating the impact of pilots’ operation and visual range, and can provide technical support for airport risk evaluation and navigation strategy on airport surface.
- This model can be applied to simulate conflict detection at X, T, Y and + shaped intersection.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, H.; Robinson, J.E.; Denery, D.G. Tactical conflict detection in terminal airspace. J. Guid. Control. Dyn. 2011, 34, 403–413. [Google Scholar] [CrossRef] [Green Version]
- Andrews, J.W.; Welch, J.D.; Erzberger, H. Safety Analysis for Advanced Separation Concepts. Air Traffic Control. Q. 2006, 14, 5–24. [Google Scholar] [CrossRef] [Green Version]
- Sampigethaya, K.; Poovendran, R.; Shetty, S.; Davis, T.; Royalty, C. Future e-enabled aircraft communications and security: The next 20 years and beyond. Proc. IEEE 2011, 99, 2040–2055. [Google Scholar] [CrossRef]
- Li, N.; Zhao, Q.; Xu, X.H. Research of taxing optimization for aircraft. In Proceedings of the 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), Changchun, China, 16–18 December 2011; pp. 25–28. [Google Scholar]
- Tang, Y.; Hu, M.H.; Huang, R.S.; Wu, H.G.; Yin, J.N.; Xu, Z.L. Aircraft taxi routes planning based on free time windows and multi-agent for A-SMGCS. Acta Aeronaut. Astronaut. Sin. 2015, 36, 1627–1638. [Google Scholar]
- Jia, Y.; Jing, Y.; Xu, C.; Cai, M. Dynamic Taxi Optimization of Surface Aircraft Based on Aircraft Priority. J. Wuhan Univ. Technol. Transp. Sci. Eng. 2018, 42, 472–477. [Google Scholar]
- Soltani, M.; Ahmadi, S.; Akgunduz, A.; Bhuiyan, N. An eco-friendly aircraft taxiing approach with collision and conflict avoidance. Transp. Res. Part C Emerg. Technol. 2020, 121, 102872. [Google Scholar] [CrossRef]
- Kang, R.; Chen, J.; Yang, K. Probabilistic Model for the Crossover Convergence of Taxiing Aircraft. J. Ordnance Equip. Eng. 2019, 40, 115–118, 150. [Google Scholar]
- Ravizza, S.; Atkin, J.A.; Maathuis, M.H.; Burke, E.K. A combined statistical approach and ground movement model for improving taxi time estimations at airports. J. Oper. Res. Soc. 2013, 64, 1347–1360. [Google Scholar] [CrossRef] [Green Version]
- Zhou, L. Research on System of Dynamic Route Planning and Simulation for Taxiing Aircraft Based on 4D Trajectory; Nanjing University of Aeronautics & Astronautics: Nanjing, China, 2015. [Google Scholar]
- Son, T.N.; Ngoc, T.; Dat, N.T. Preview Control of Aircraft in Ground Operation. In Proceedings of the 2018 5th International Conference on Control, Decision and Information Technologies (CoDIT), Thessaloniki, Greece, 10–13 April 2018; pp. 550–554. [Google Scholar]
- Krawczyk, M.; Szczepanski, C.J.; Zajdel, A. Aircraft model for the automatic taxi directional control design. Aircr. Eng. Aerosp. Technol. 2019, 91, 289–295. [Google Scholar] [CrossRef]
- Mori, R. Aircraft ground-taxiing model for congested airport using cellular automata. IEEE Trans. Intell. Transp. Syst. 2013, 14, 180–188. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, X.H.; Gao, W. Design and simulation of aircraft taxiing model based on Agent. J. Civ. Aviat. Univ. China 2014, 32, 1–5. [Google Scholar]
- Cetek, C.; Cinar, E.; Aybek, F.; Cavcar, A. Capacity and delay analysis for airport maneuvering areas using simulation. Aircr. Eng. Aerosp. Technol. 2014, 86, 43–55. [Google Scholar] [CrossRef]
- Yang, K.; Kang, R. Research on taking off and landing space of aircrafts based on cellular automaton. J. Sichuan Univ. Eng. Sci. Ed. 2016, 48 (Suppl. S2), 127–134. [Google Scholar]
- Zhiwei, X.; Shijiao, L.; Yunxiao, T.; Qian, L. Airport surface traffic simulation based on agent-cellular automaton. J. Syst. Simul. 2018, 30, 857–865. [Google Scholar]
- Kang, R.; Yang, K. Influence of turn-off taxiway configuration on runway capacity. Comput. Eng. Des. 2018, 39, 3596–3600. [Google Scholar]
- Xue, Q.W.; Lu, J.; Jiang, Y. Aircraft taxiway traffic flow characteristic simulation at large airport. J. Beijing Univ. Aeronaut. Astronaut. 2019, 45, 567–574. [Google Scholar]
- Kang, R.; Chen, J. Study on Aircraft Take-Off and Landing Interval under Isolated Operation Mode of Double Runway. Aeronaut. Comput. Tech. 2021, 51, 14–17, 21. [Google Scholar]
- Kang, R.; Deng, H.; Yang, K. Runway service capacity evaluation model for the airport with mixed transportation. Sci. Technol. Eng. 2022, 22, 2116–2123. [Google Scholar]
- Yang, K.; Kang, R. Research on Taking off and Landing Separation of Aircrafts in Airport Category II Operation. Adv. Eng. Sci. 2019, 51, 217–225. [Google Scholar]
- Prevot, T.; Homola, J.R.; Martin, L.H.; Mercer, J.S.; Cabrall, C.D. Toward Automated Air Traffic Control-Investigating a Fundamental Paradigm Shift in Human/Systems Interaction. Int. J. Hum.-Comput. Interact. 2012, 28, 77–98. [Google Scholar] [CrossRef]
- Mercer, J.; Homola, J.; Cabrall, C.; Martin, L.; Morey, S.; Gomez, A.; Prevôt, T. Human-automation cooperation for separation assurance in future NextGen environments. In Proceedings of the International Conference on Human-Computer Interaction in Aerospace, HCI-Aero 2014, Santa Clara, CA, USA, 30 July–1 August 2014; pp. 1–8. [Google Scholar]
- ICAO DOC 4444. Air Traffic Management—Procedures for Air Navigation Services (PANS-ATM) Ed 16. 2016. Available online: https://www.afeonline.com/shop/icao-doc-4444.html (accessed on 15 November 2016).
- Pang, Y.; Zhao, X.; Hu, J.; Yan, H.; Liu, Y. Bayesian spatio-temporal graph transformer network (b-star) for multi-aircraft trajectory prediction. Knowl.-Based Syst. 2022, 249, 108998. [Google Scholar] [CrossRef]
- Xu, Z.; Zeng, W.; Chu, X.; Cao, P. Multi-aircraft trajectory collaborative prediction based on social long short-term memory network. Aerospace 2021, 8, 115. [Google Scholar] [CrossRef]
- Prandini, M.; Piroddi, L.; Puechmorel, S.; Brazdilova, S.L. Toward air traffic complexity assessment in new generation air traffic management systems. IEEE Trans. Intell. Transp. Syst. 2011, 3, 809–818. [Google Scholar] [CrossRef]
- Dubourg, B.; Michel, F. Optical Guiding and Taxiing Assistance Device for an Aircraft Having a Dedicated Symbology. EP2078183. 2007. Available online: https://patentimages.storage.googleapis.com/f8/2f/bf/a81f089dc830f4/EP2078183B1.pdf (accessed on 9 October 2017).
- Cox, J.J.; Cox, I.; Vana, W. Cockpit Control System for Controlling Ground Travel in Aircraft Equipped with Engine-Free Electric Taxi System. U.S. Patent Application No. 10,293,922, 14 March 2019. [Google Scholar]
- Holbrook, J.B.; Stewart, M.J.; Smith, B.E.; Prinzel, L.J.; Matthews, B.L.; Avrekh, I.; Cardoza, C.T.; Ammann, O.C.; Adduru, V.; Null, C.H. Human Performance Contributions to Safety in Commercial Aviation. NASA/TM 2019, 2019, 220417. [Google Scholar]
- Kramer, L.J.; Williams, S.; Arthur, T.; Bailey, R.; Shelton, K.; Severance, K.; Kibler, K. Initial Flight Testing of an eXternal Vision System (XVS) for the Low Boom Flight Demonstrator (LBFD). Flight Test. Conf. 2018, 2018, 3411. [Google Scholar]
- Order of the Ministry of Transport, PRC No. 30. Civil Aviation Air Traffic Management Rules. 2017. Available online: http://xxgk.mot.gov.cn/jigou/fgs/201712/P020180116563208004963.pdf (accessed on 29 September 2017).
- Research Institute of Traffic Science, Ministry of Communications. Civil Aviation Airport Flight Zone Technical Standards: MHJ1-85-Photocopy; Shanghai Institute of Highway Engineering: Shanghai, China, 1985; pp. 121–144.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CallSign | Dep Date Time | Taxi Time | Number of Plots |
|---|---|---|---|
| MAS377 | 14 January 2014 16:06:24 | 2257 s | 1481 |
| CSN3501 | 14 January 2014 16:15:16 | 1270 s | 718 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.; Yang, H.; Zhang, J.; Kang, R. Effects on Taxiing Conflicts at Intersections by Pilots’ Sensitive Speed Adjustment. Aerospace 2022, 9, 288. https://doi.org/10.3390/aerospace9060288
Yang K, Yang H, Zhang J, Kang R. Effects on Taxiing Conflicts at Intersections by Pilots’ Sensitive Speed Adjustment. Aerospace. 2022; 9(6):288. https://doi.org/10.3390/aerospace9060288
Chicago/Turabian StyleYang, Kai, Hongyu Yang, Jianwei Zhang, and Rui Kang. 2022. "Effects on Taxiing Conflicts at Intersections by Pilots’ Sensitive Speed Adjustment" Aerospace 9, no. 6: 288. https://doi.org/10.3390/aerospace9060288
APA StyleYang, K., Yang, H., Zhang, J., & Kang, R. (2022). Effects on Taxiing Conflicts at Intersections by Pilots’ Sensitive Speed Adjustment. Aerospace, 9(6), 288. https://doi.org/10.3390/aerospace9060288