
Study on the Characteristics of Boundary Layer Flow under the Influence of Surface Microstructure

Abstract
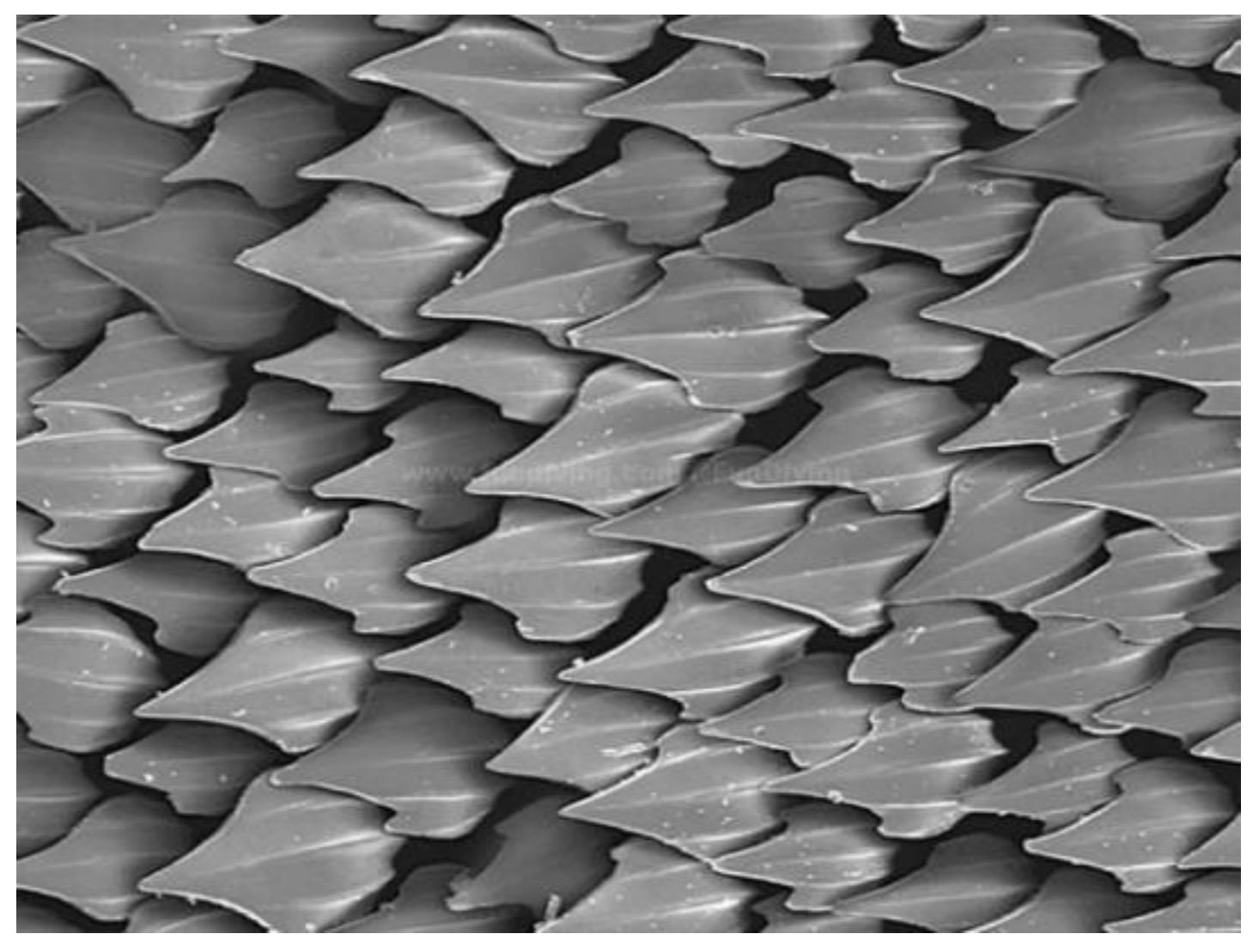
:1. Introduction
2. Physical Model and Numerical Method
2.1. LES Method
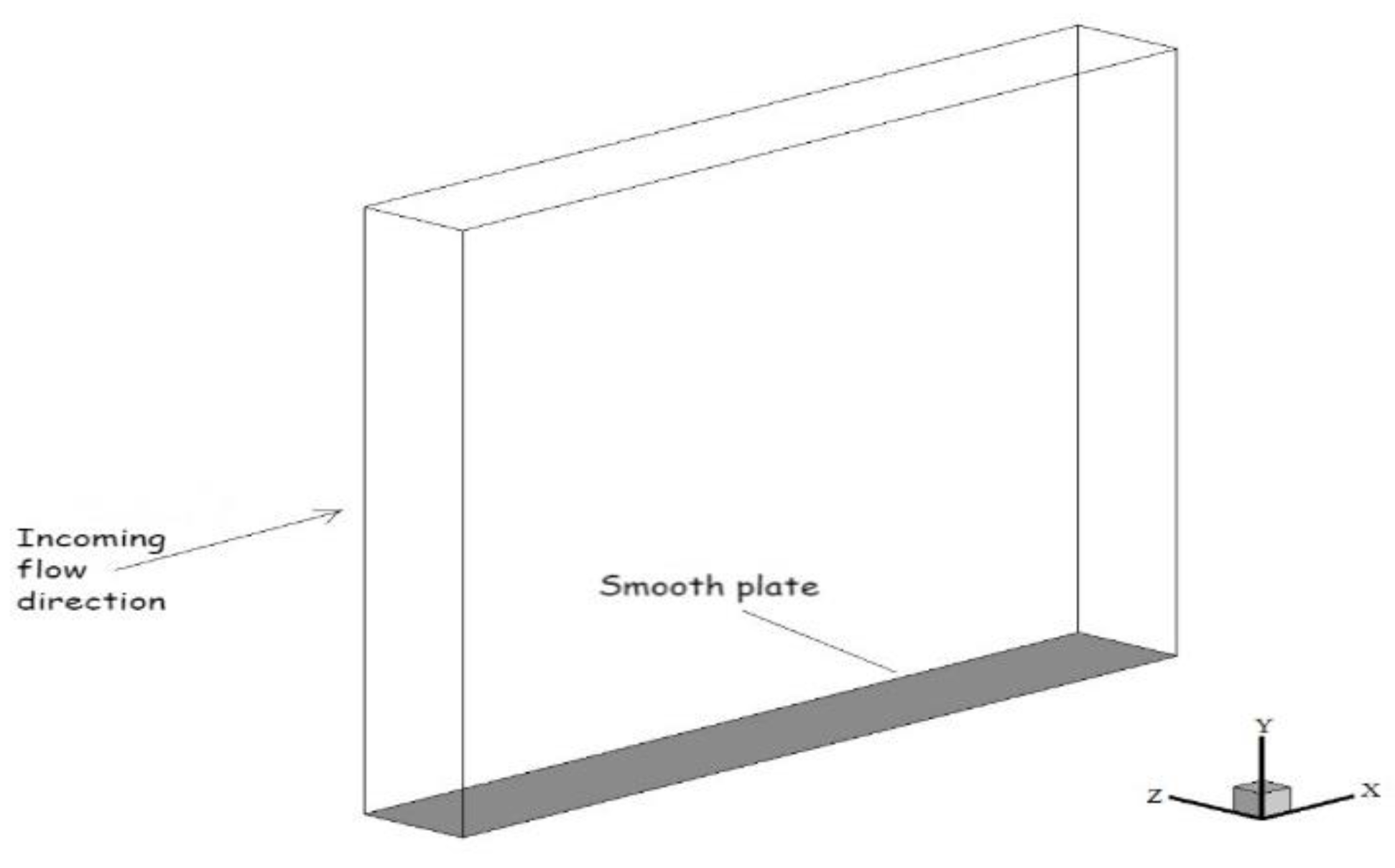
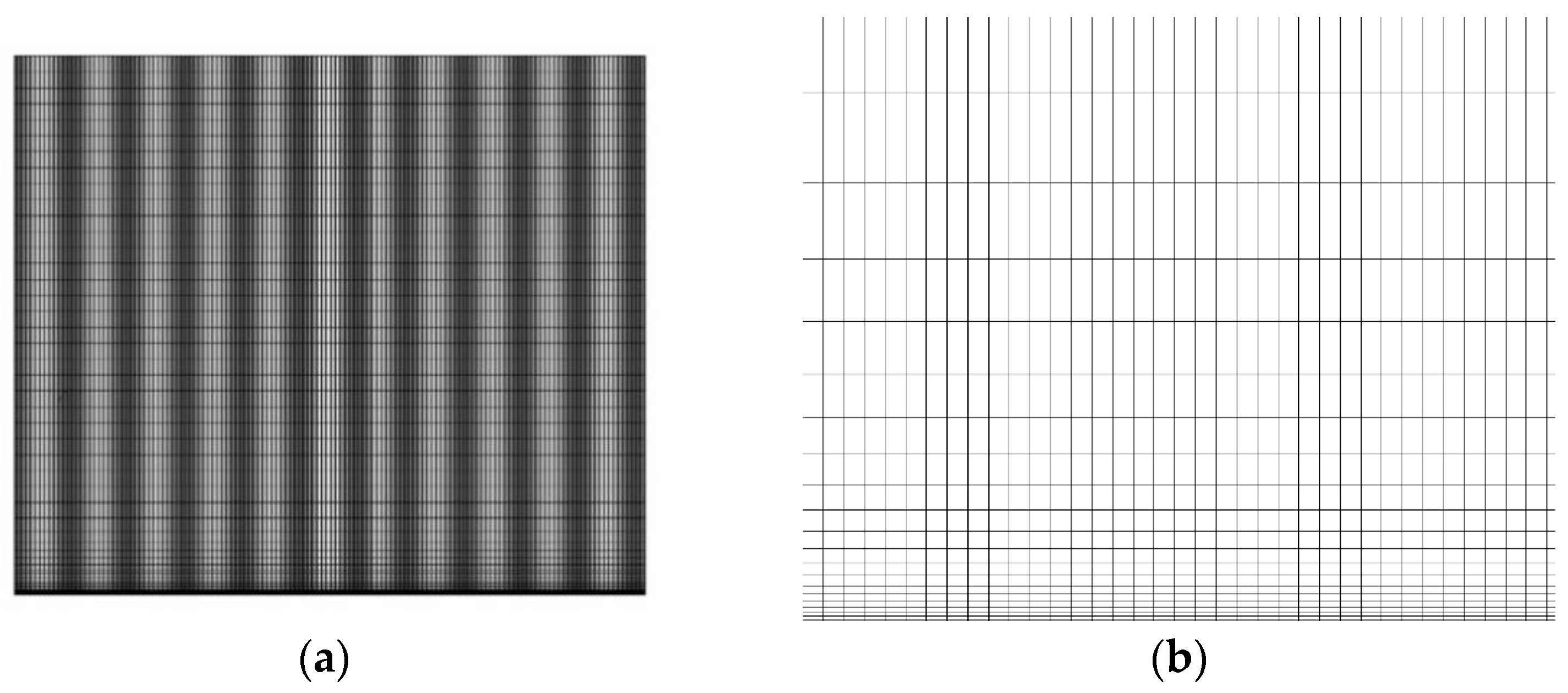
2.2. Smooth Plate Model and Meshing
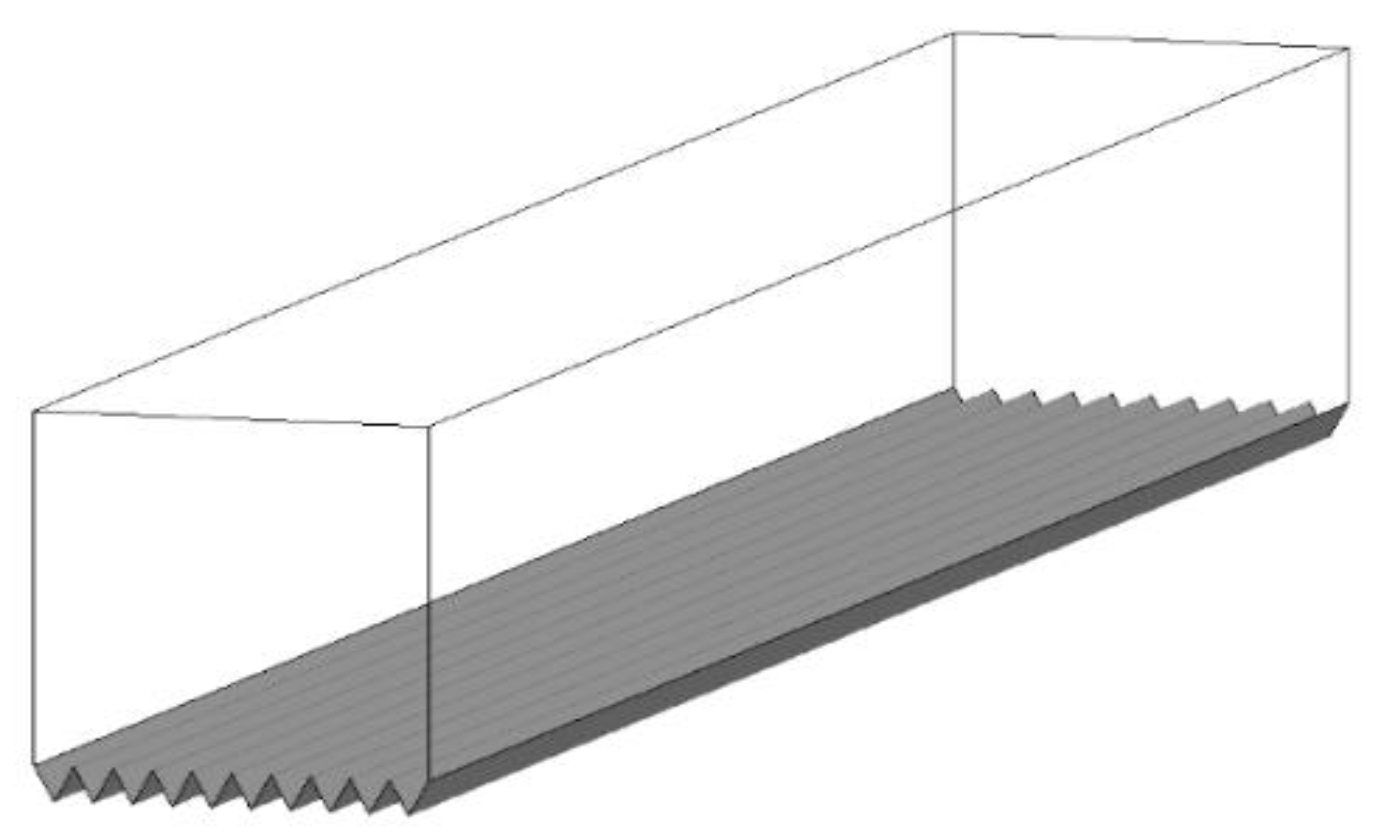
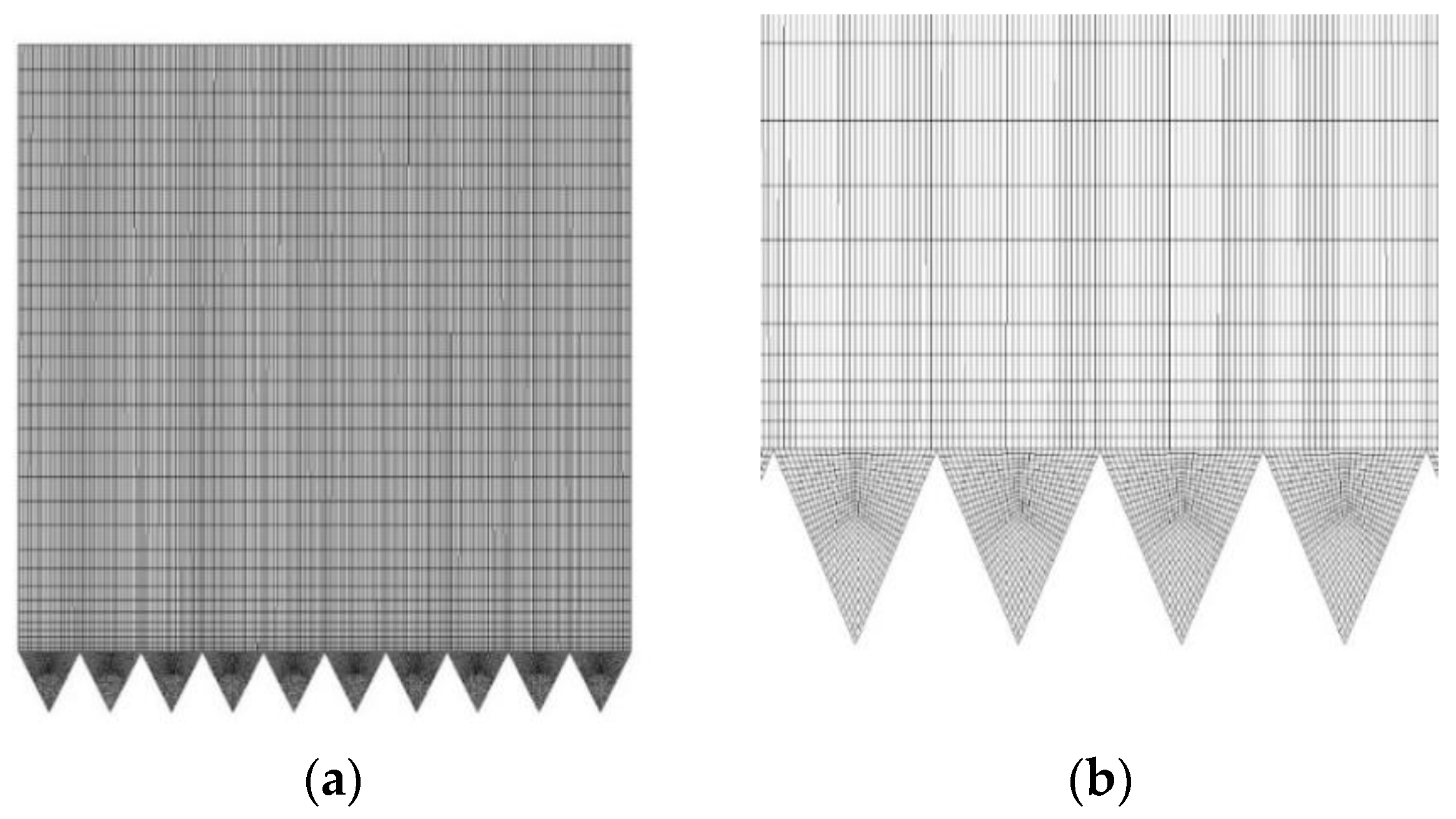
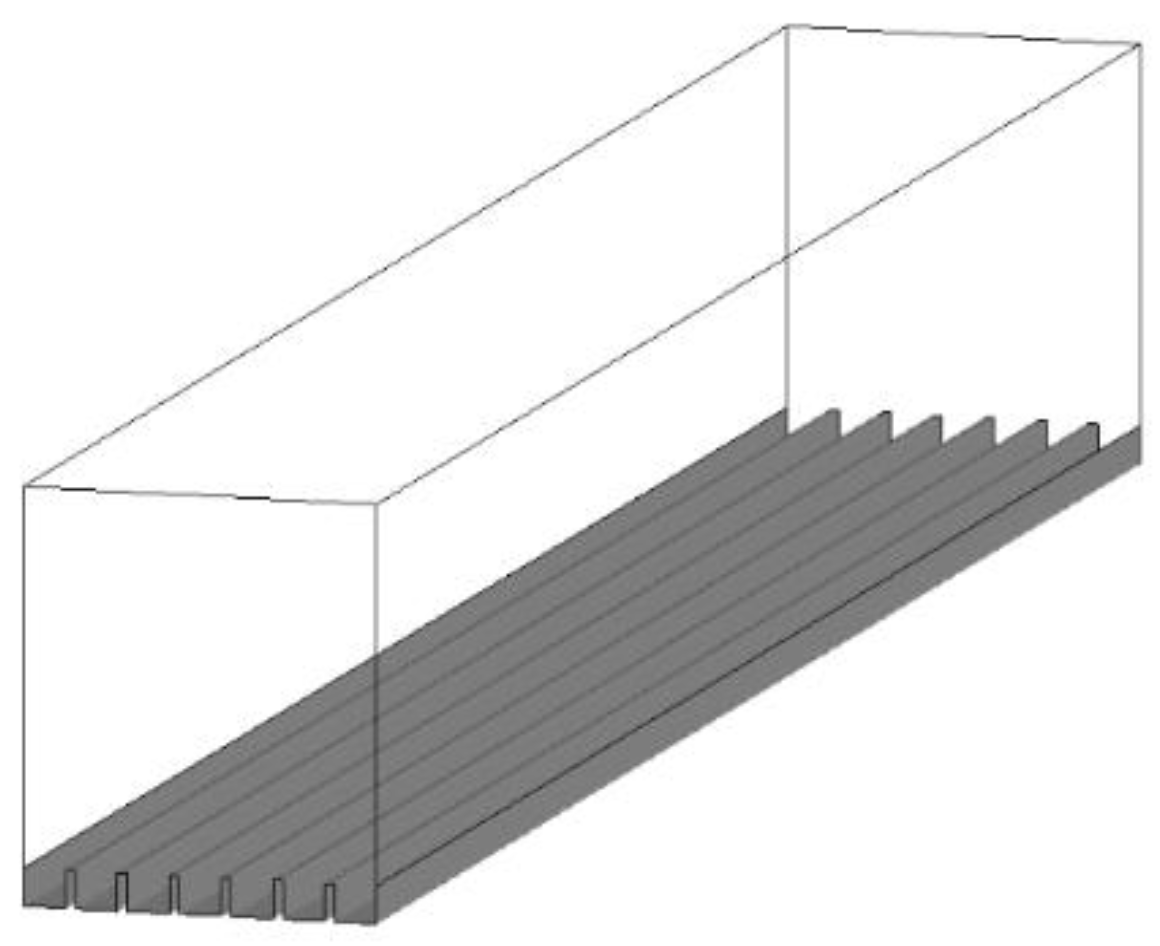
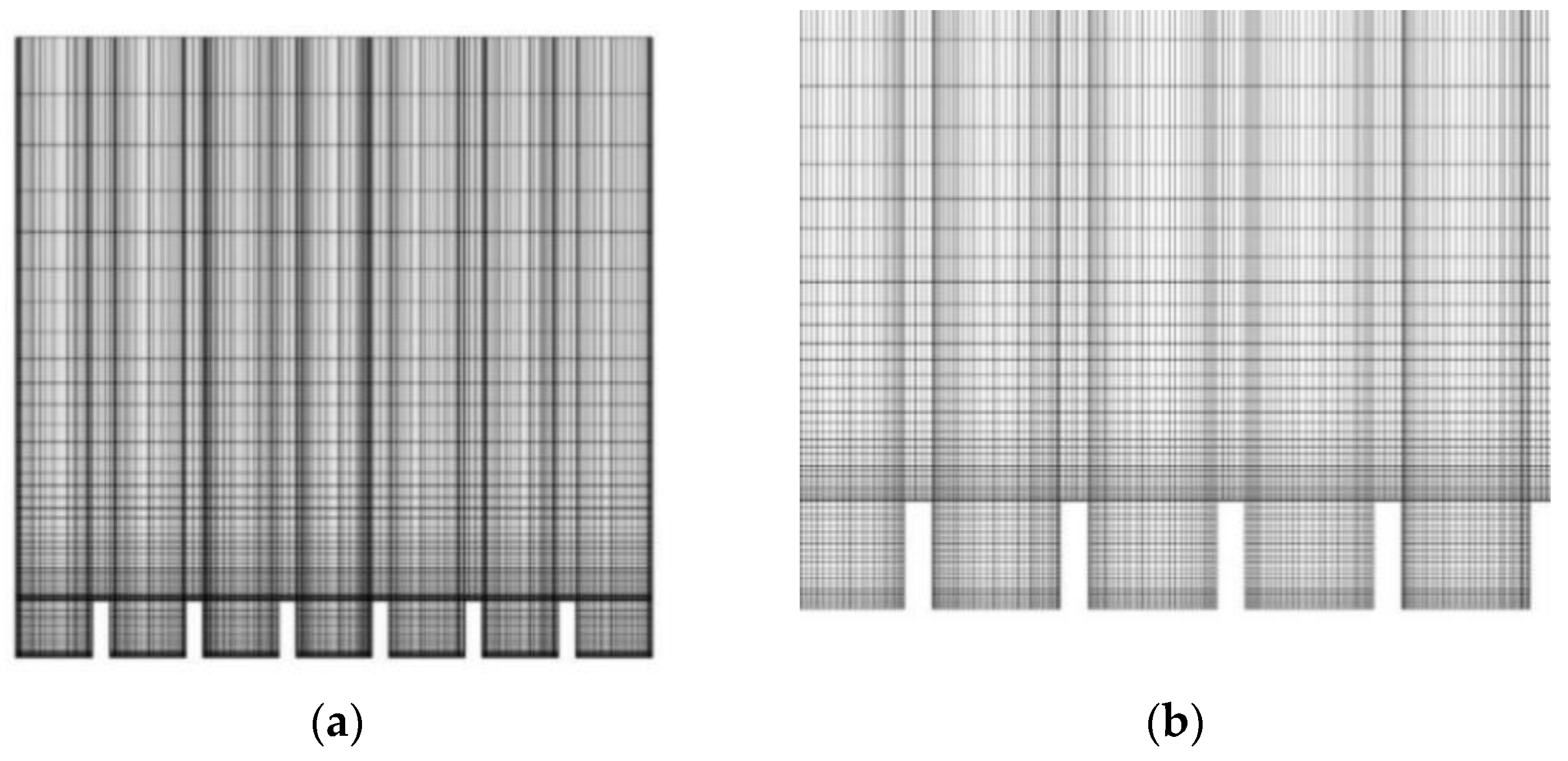
2.3. Surface Microstructure Calculation Model and Meshing
3. Calculation Results and Analysis
3.1. Numerical Method Validation
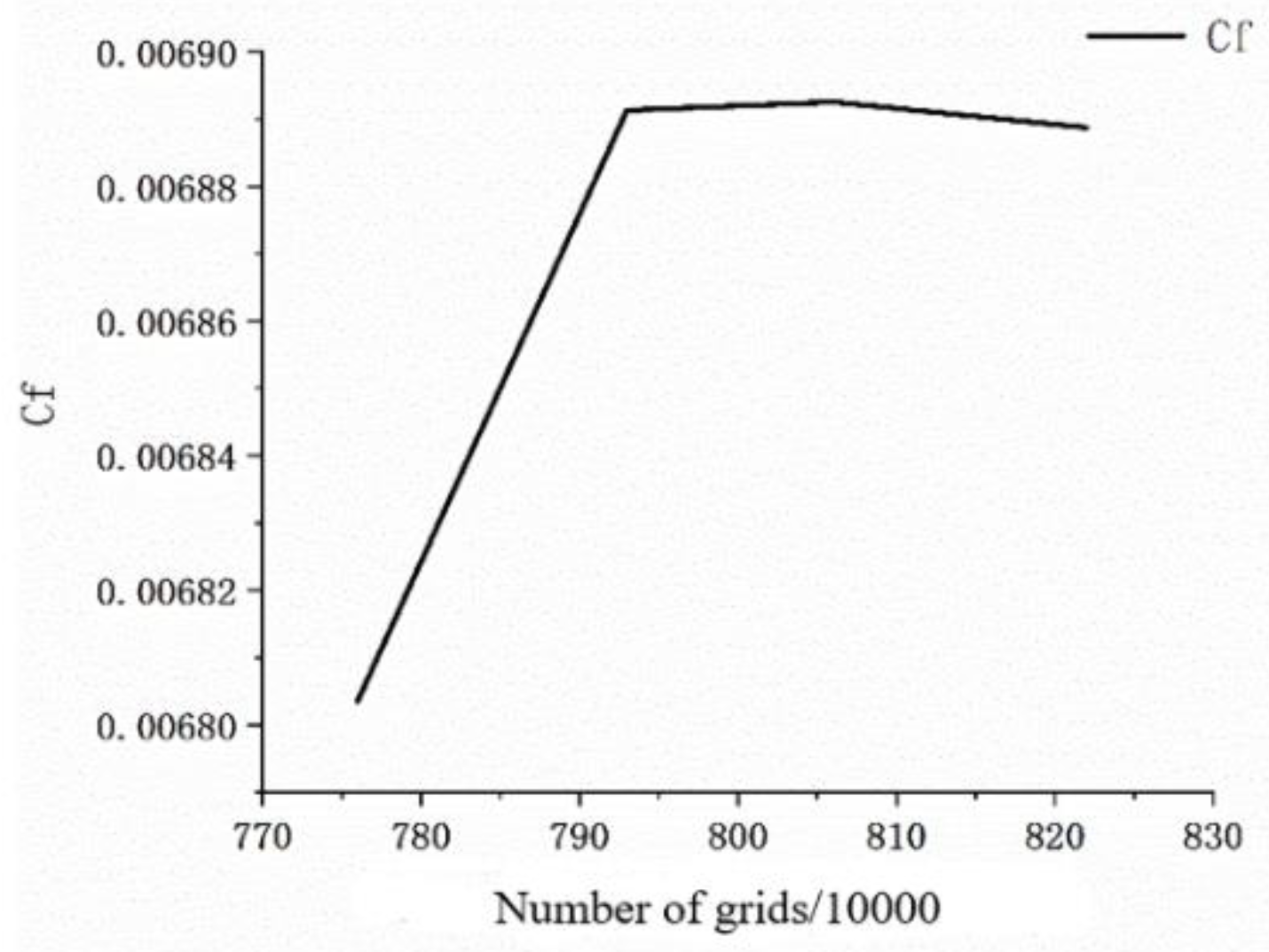
3.1.1. Grid Independence Verification of Smooth Plate
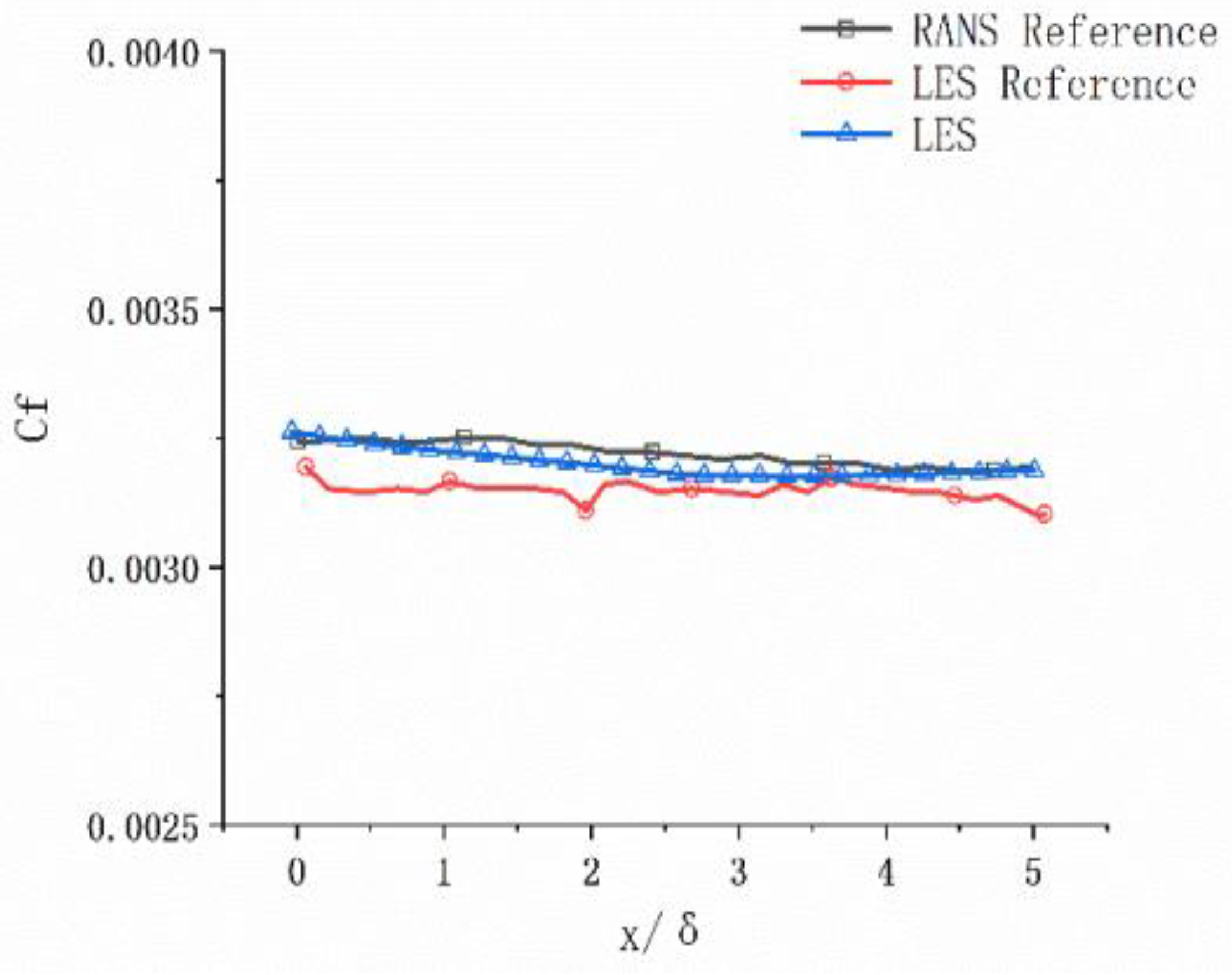
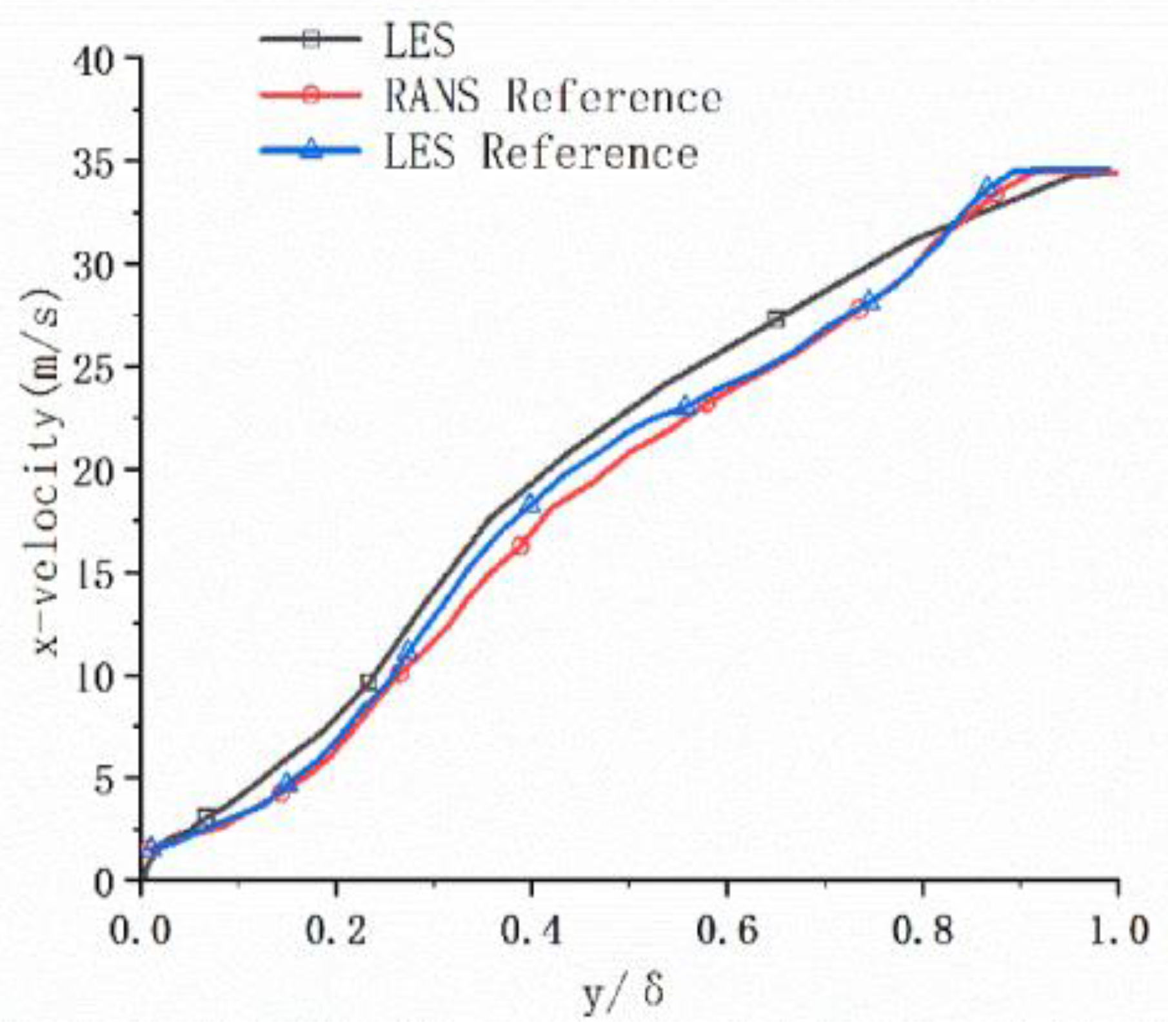
3.1.2. Comparative Analysis of Literature Results
3.1.3. Comparison of the Results of LES and RANS
3.2. Large Eddy Simulation of Plate Boundary Layer under Subsonic Flow
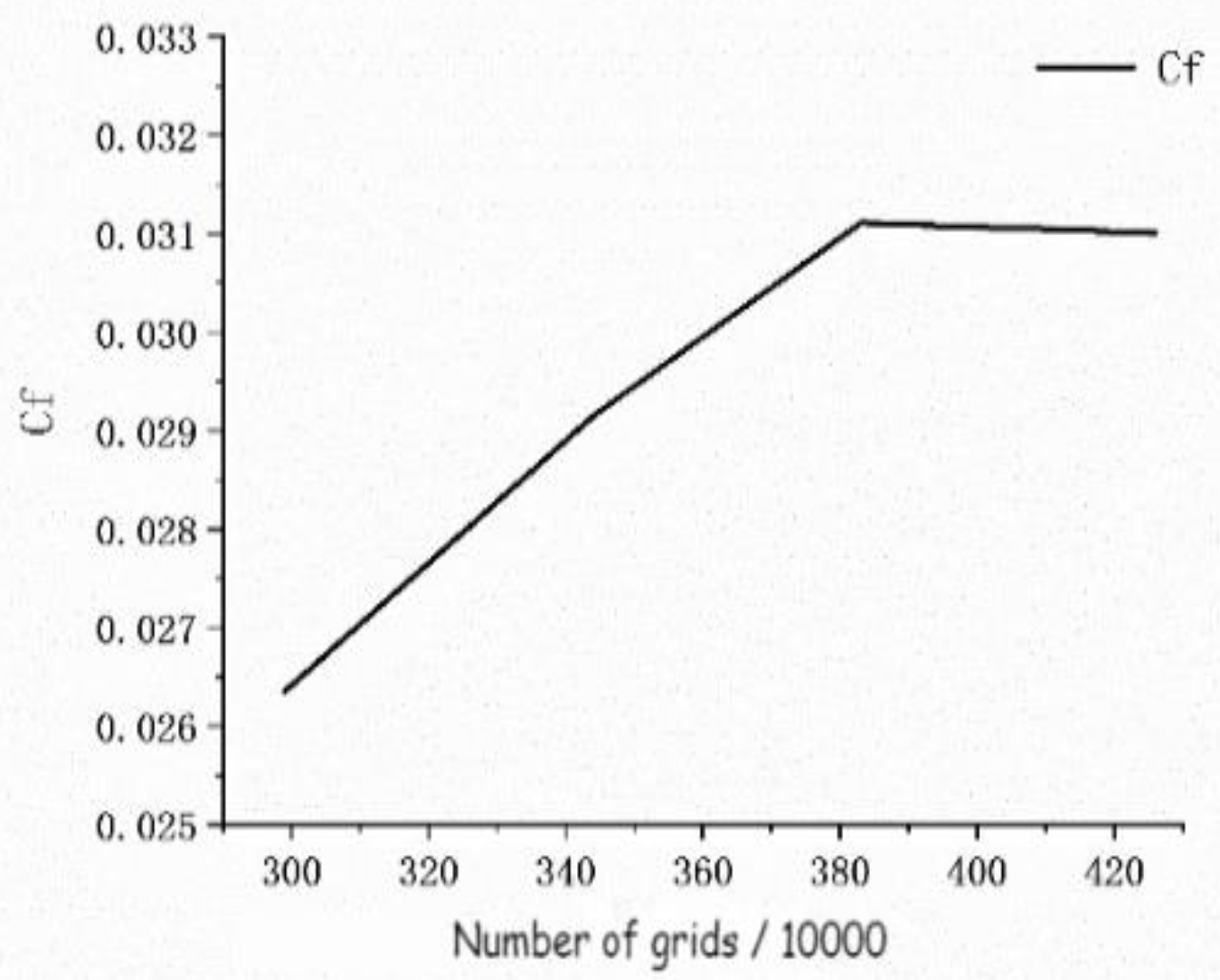
3.2.1. Grid Independence Verification
3.2.2. Triangular Groove Plate
- (1)
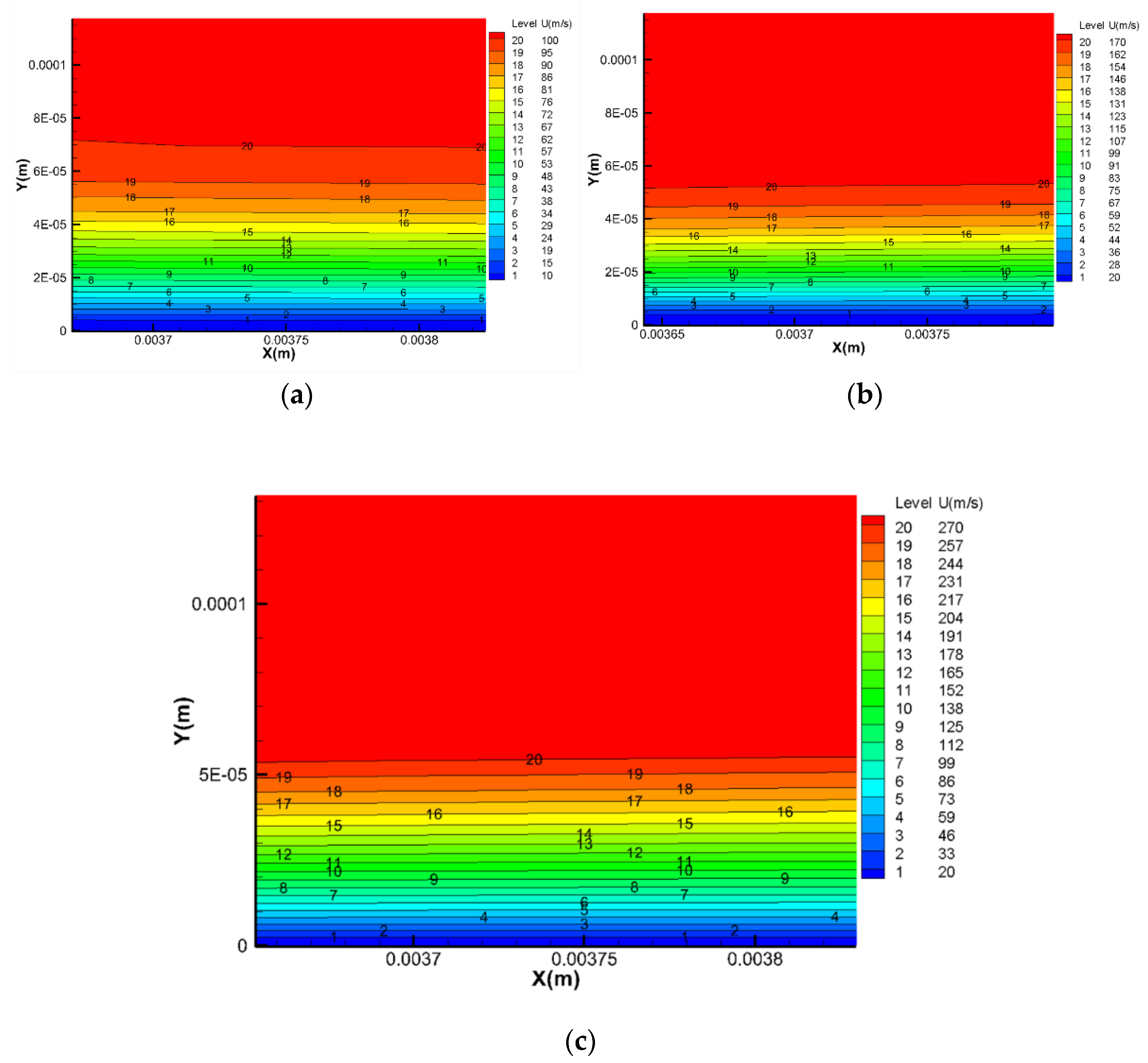
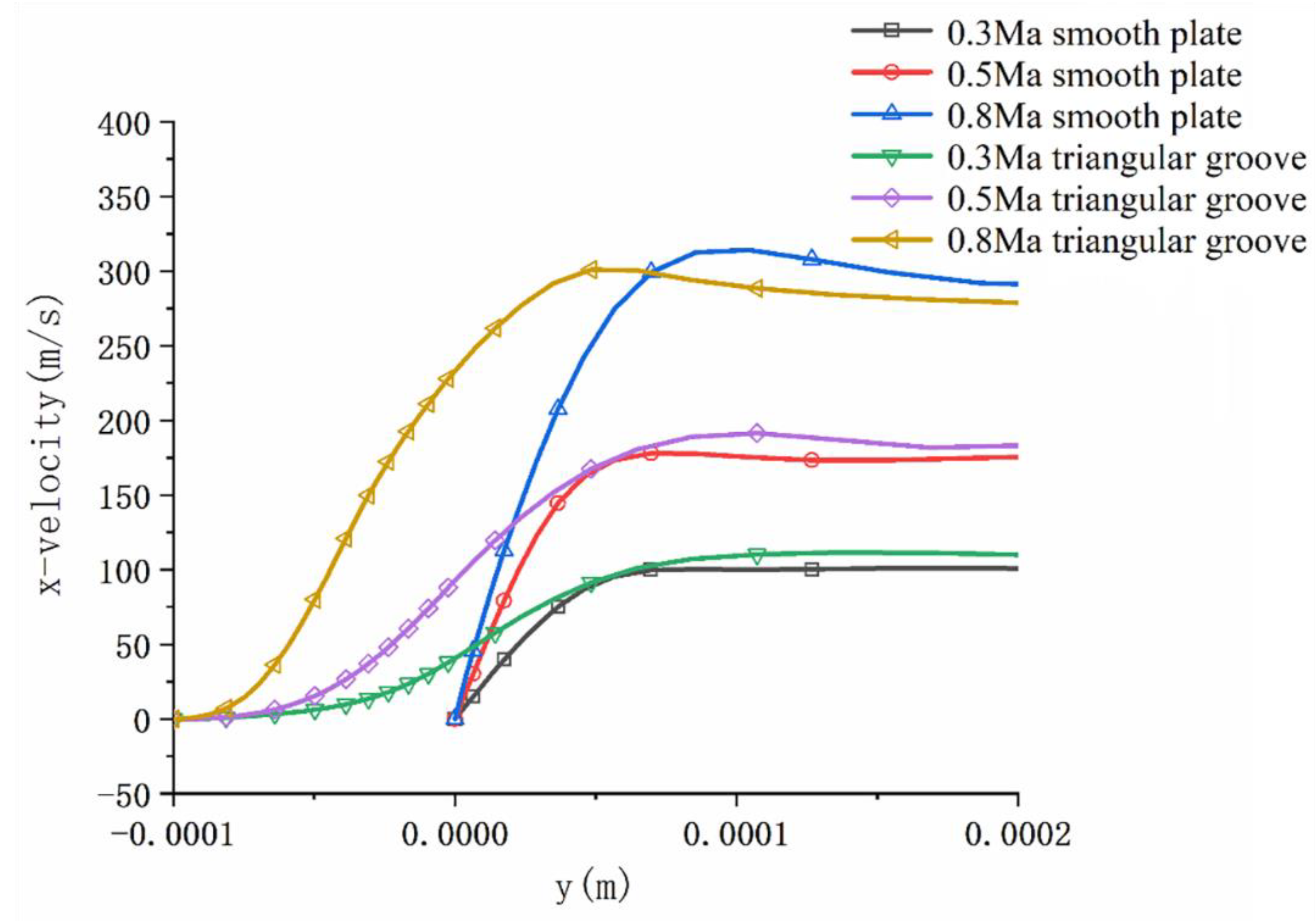
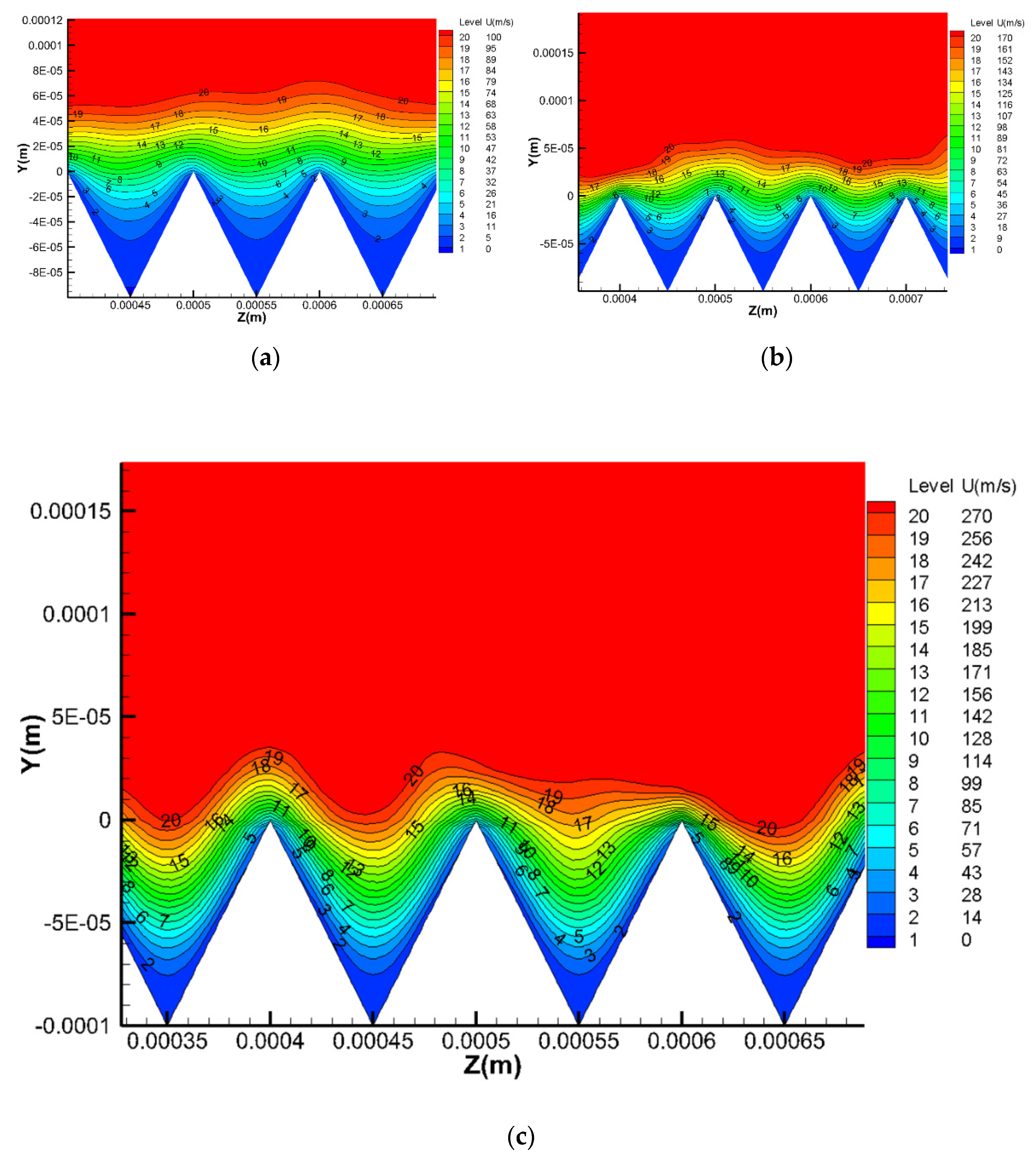
- Velocity distribution
- (2)
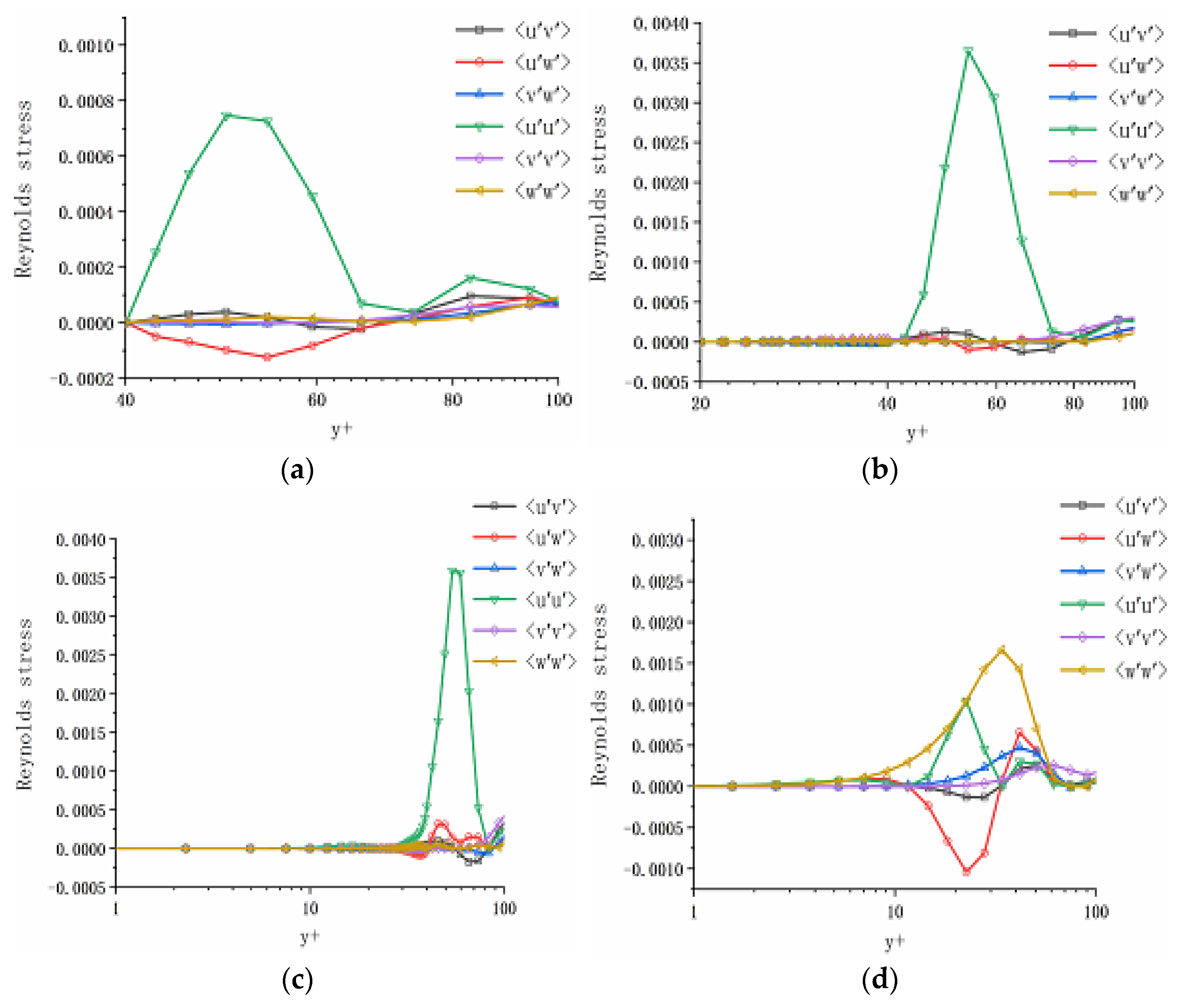
- Reynolds stress
- (3)
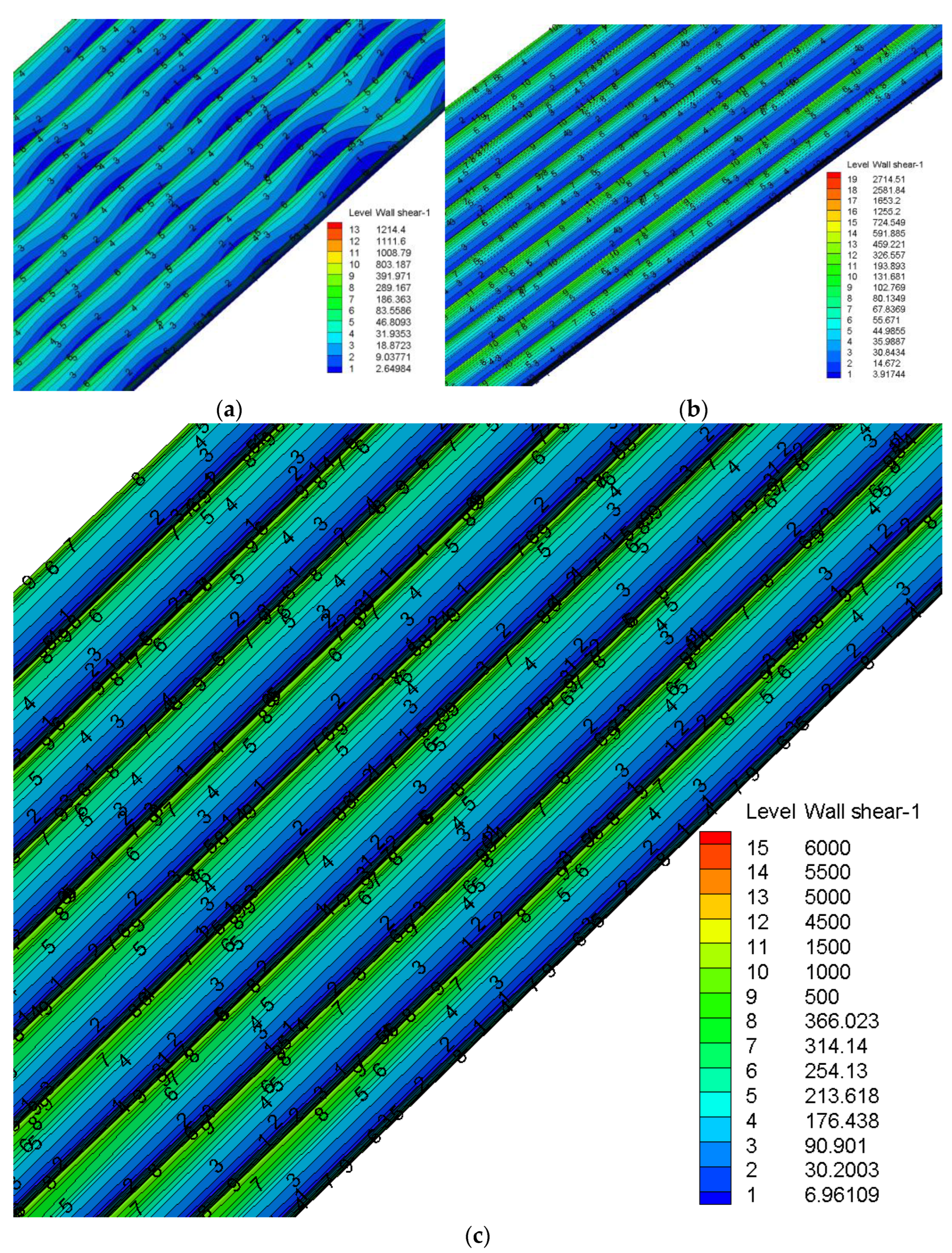
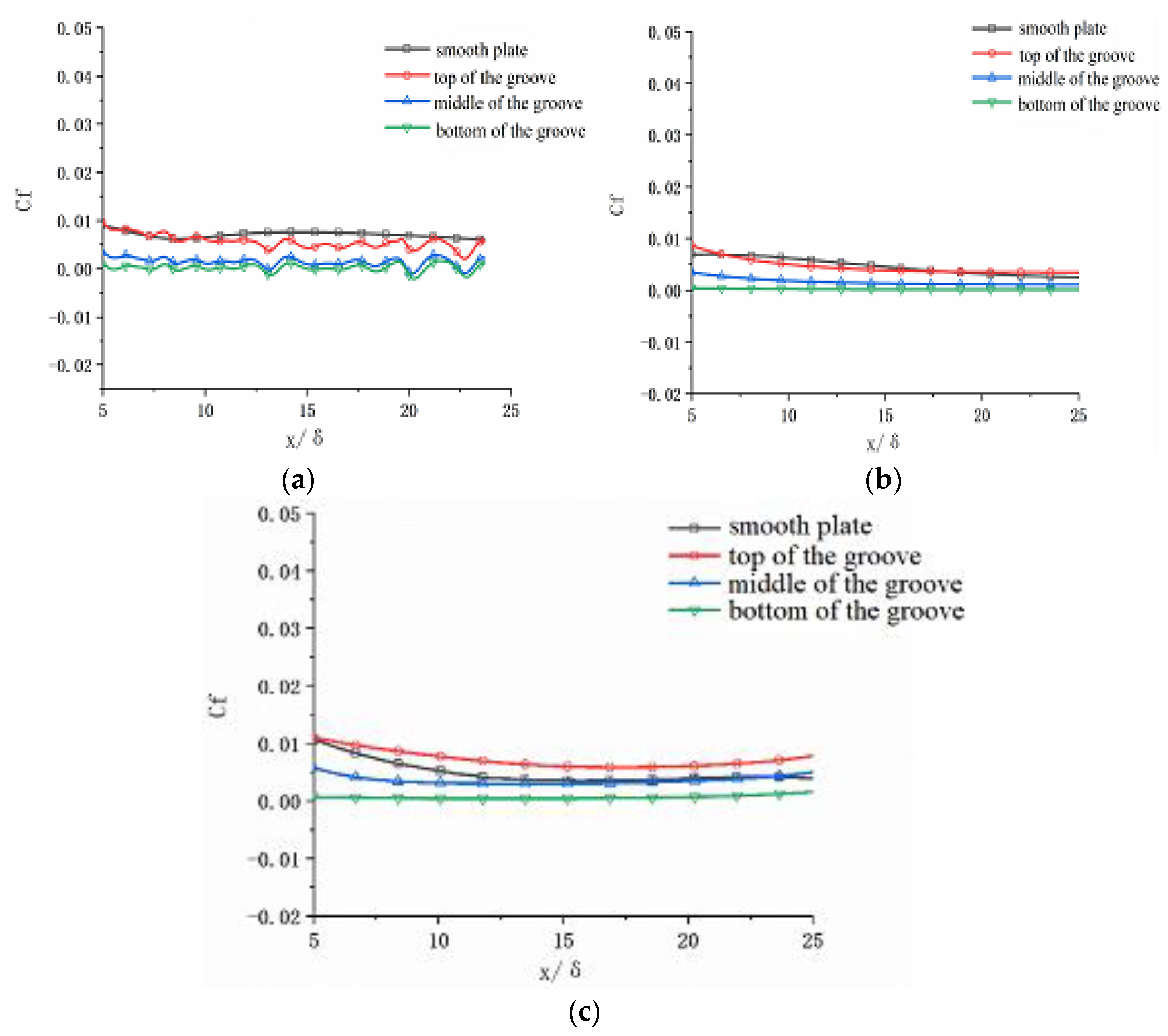
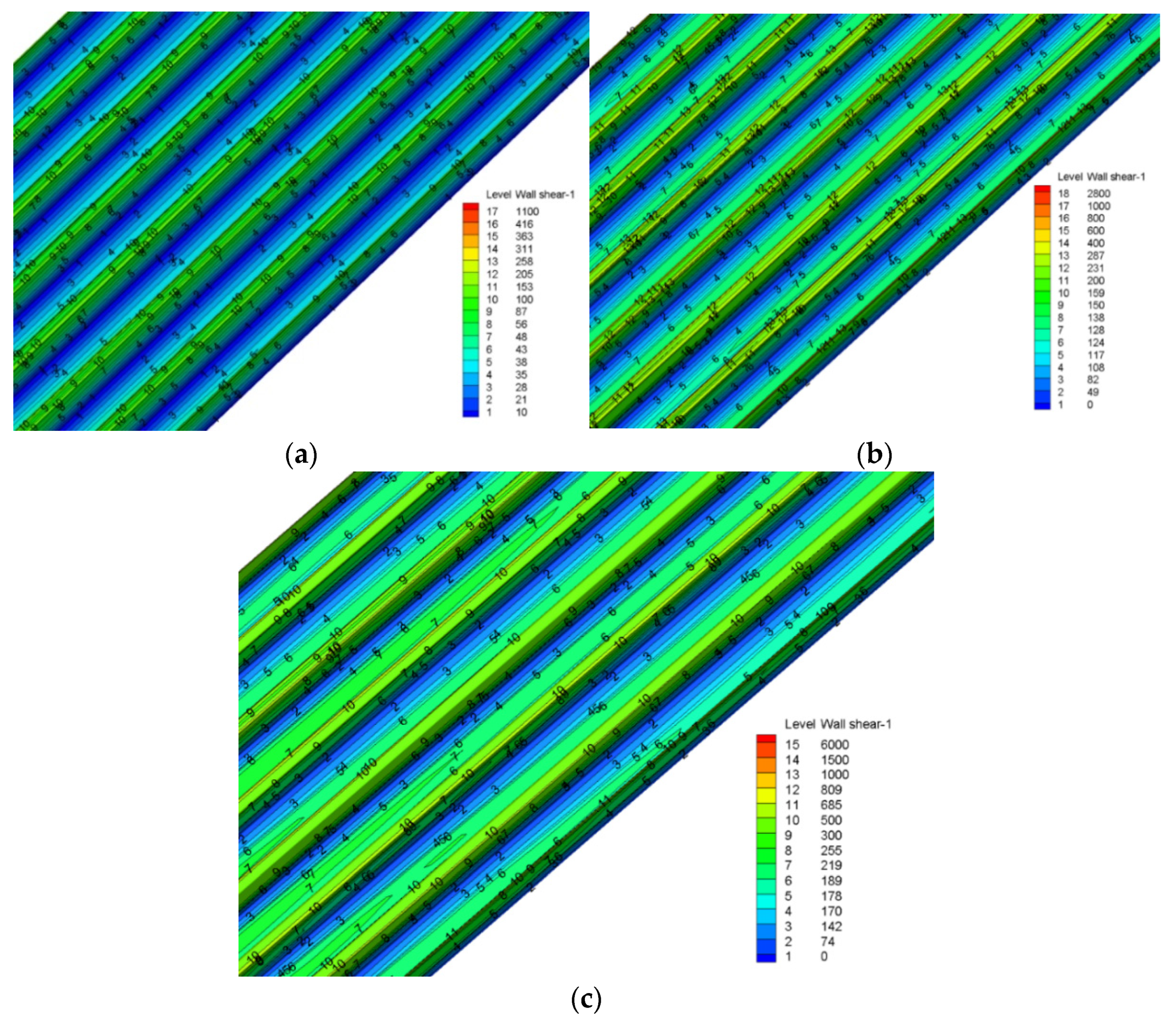
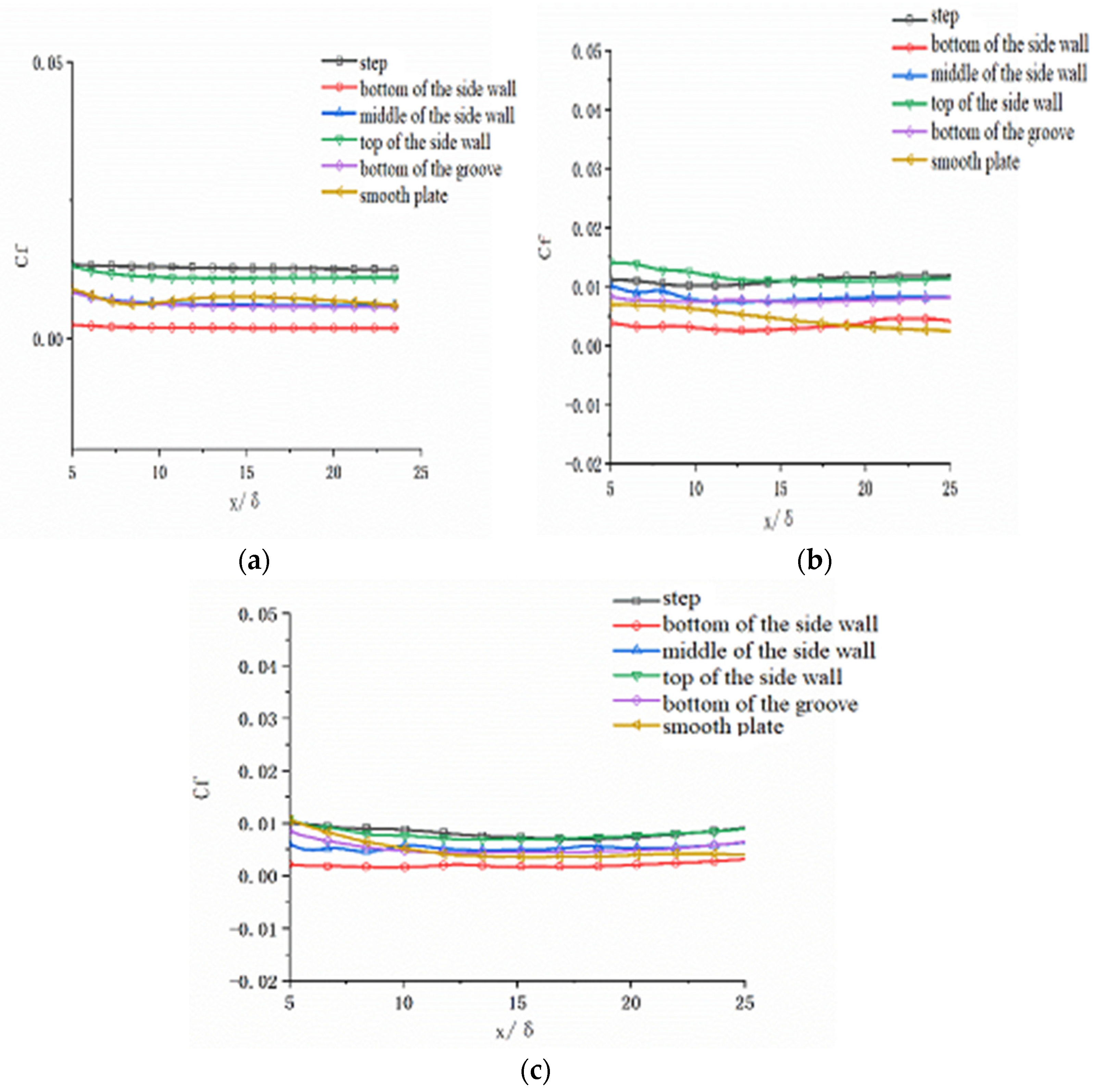
- Wall shear stress
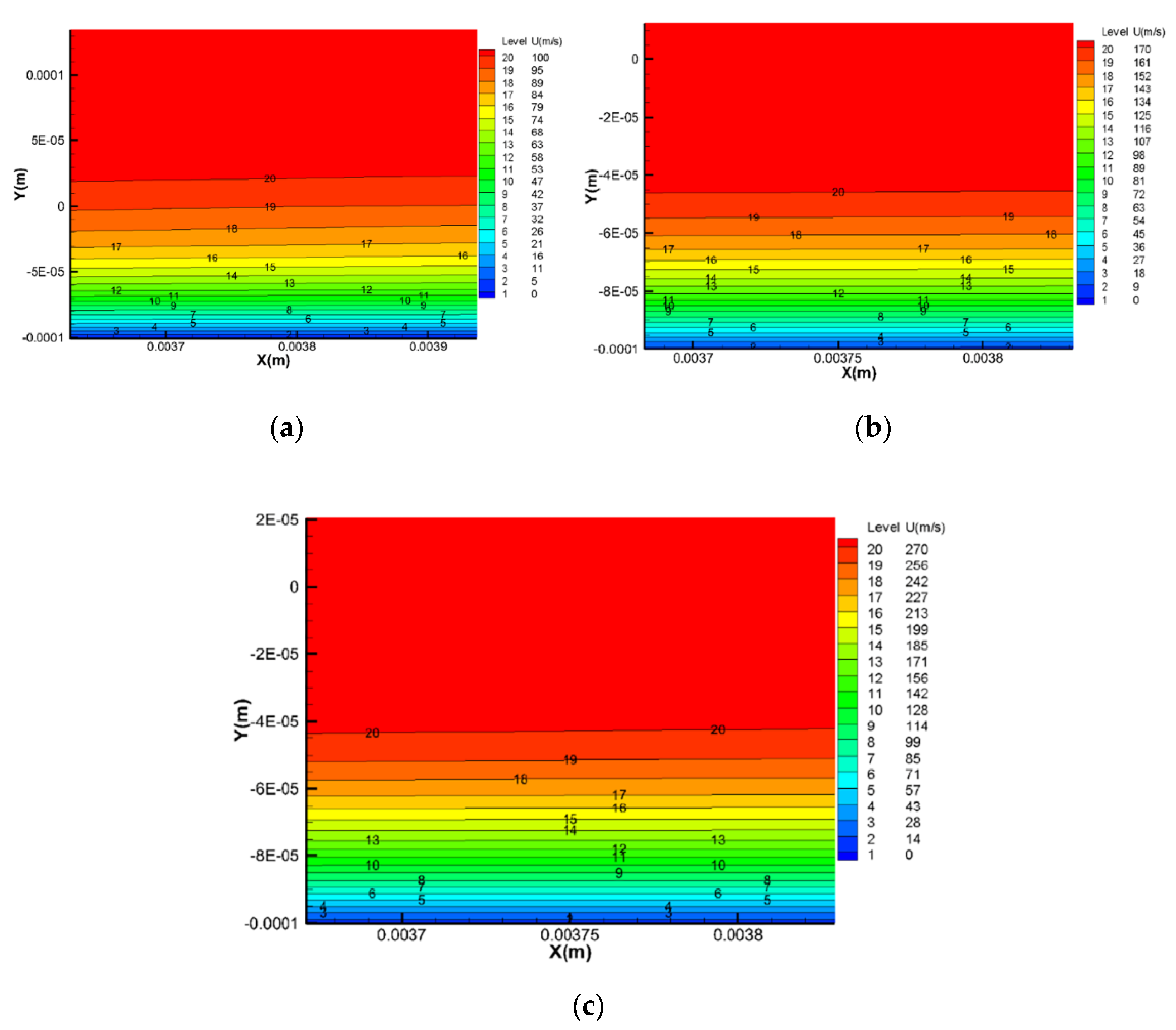
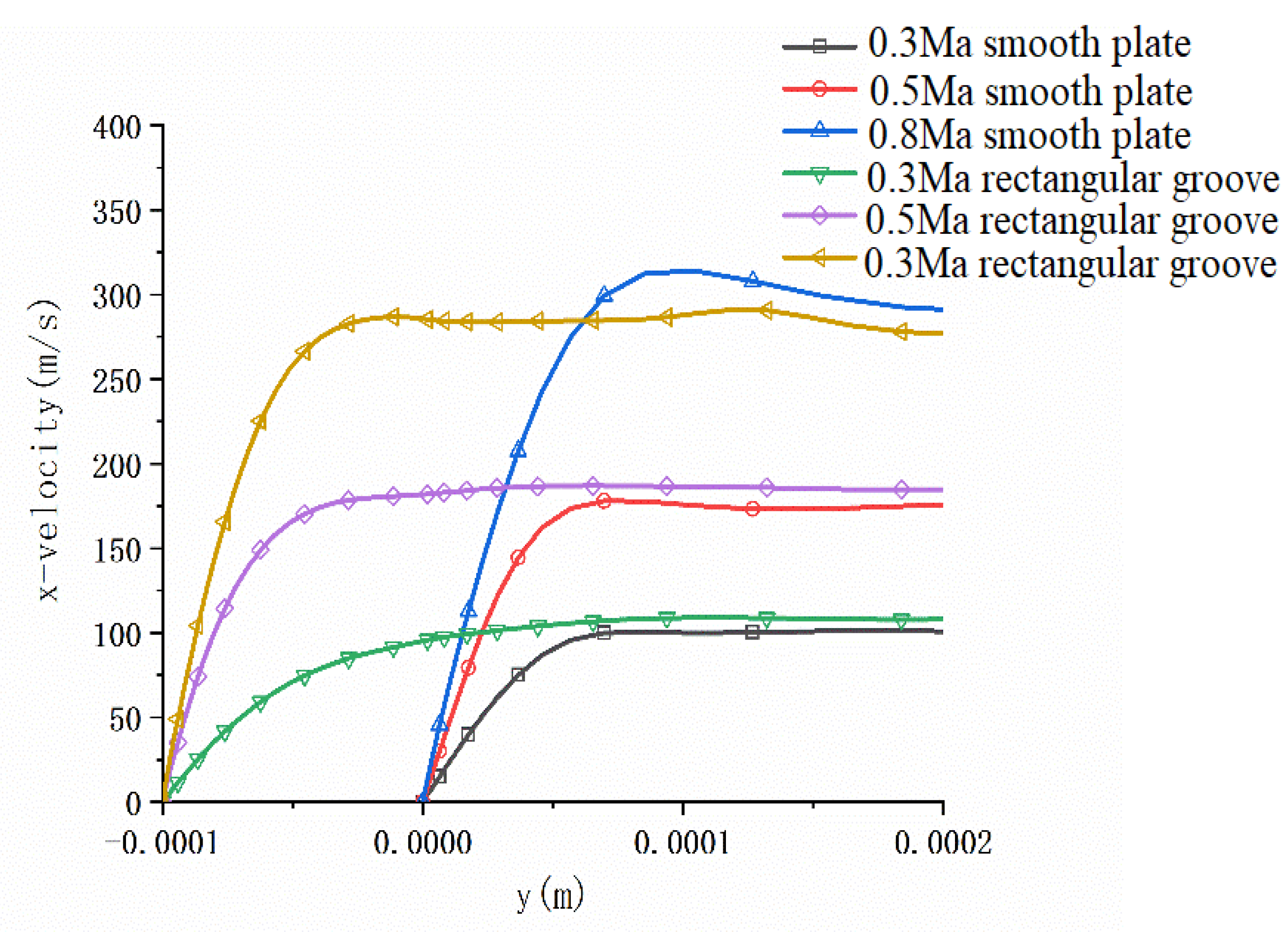
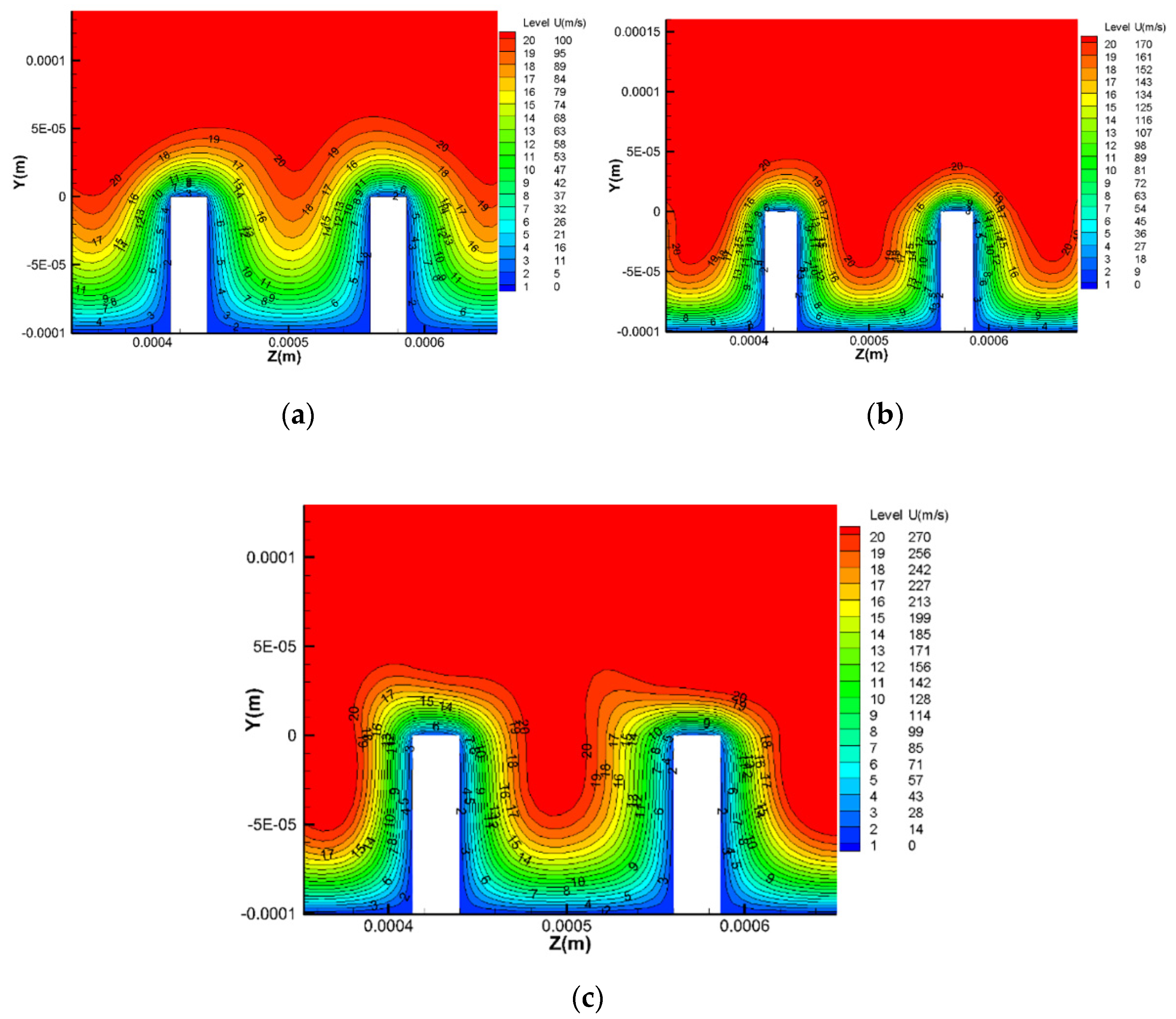
3.2.3. Rectangular Groove Plate
- (1)
- Velocity distribution
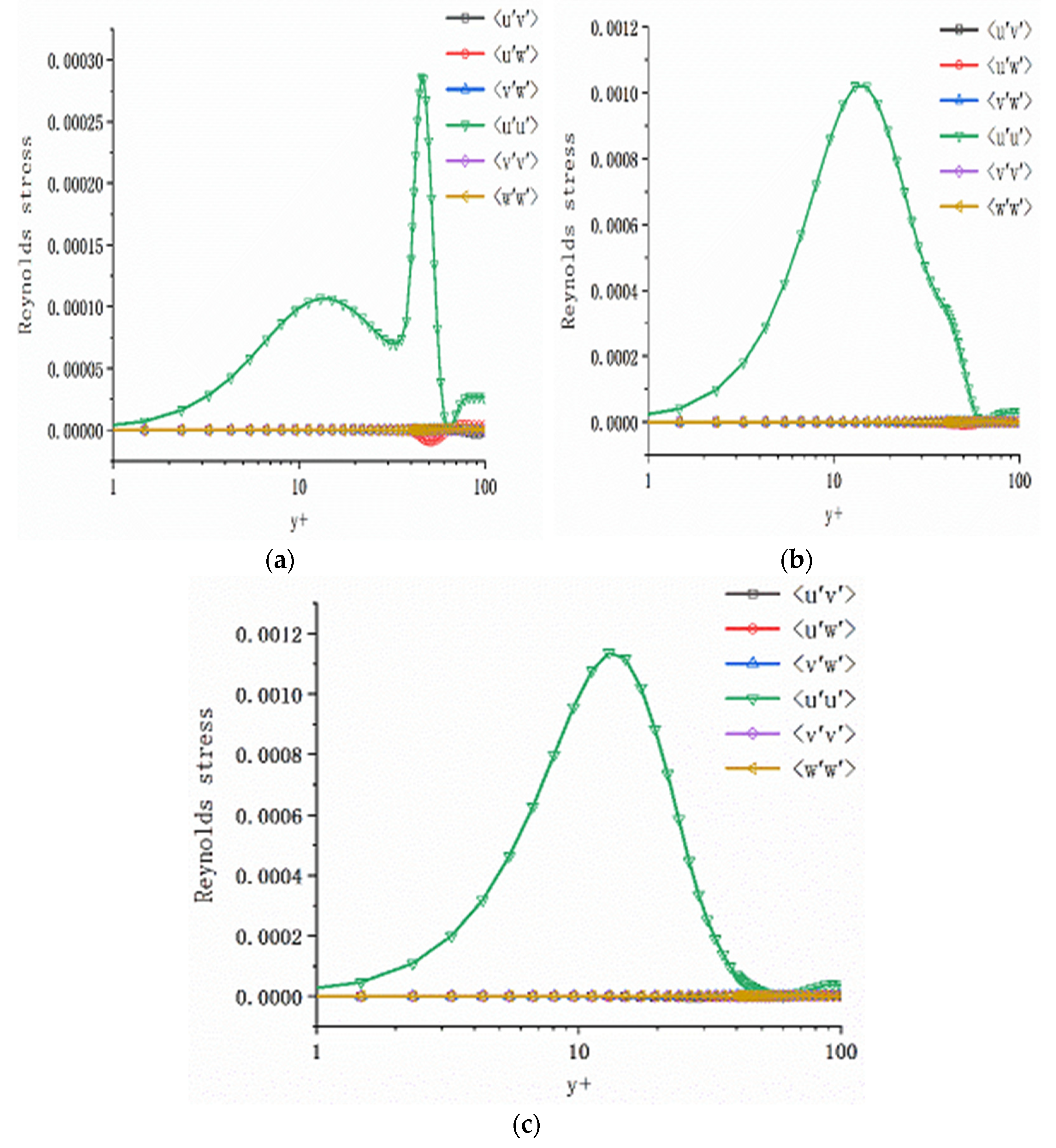
- (2)
- Reynolds stress
- (3)
- Wall shear stress
4. Conclusions
- (1)
- The triangular groove structure along the flow direction can reduce frictional resistance under subsonic flow, but the drag reduction effect will decrease with the increase in velocity. The rectangular groove structure has different effects on the friction resistance at different speeds. The friction increases when the speed is below 0.8 Ma and decreases when the speed is above 0.8 Ma.
- (2)
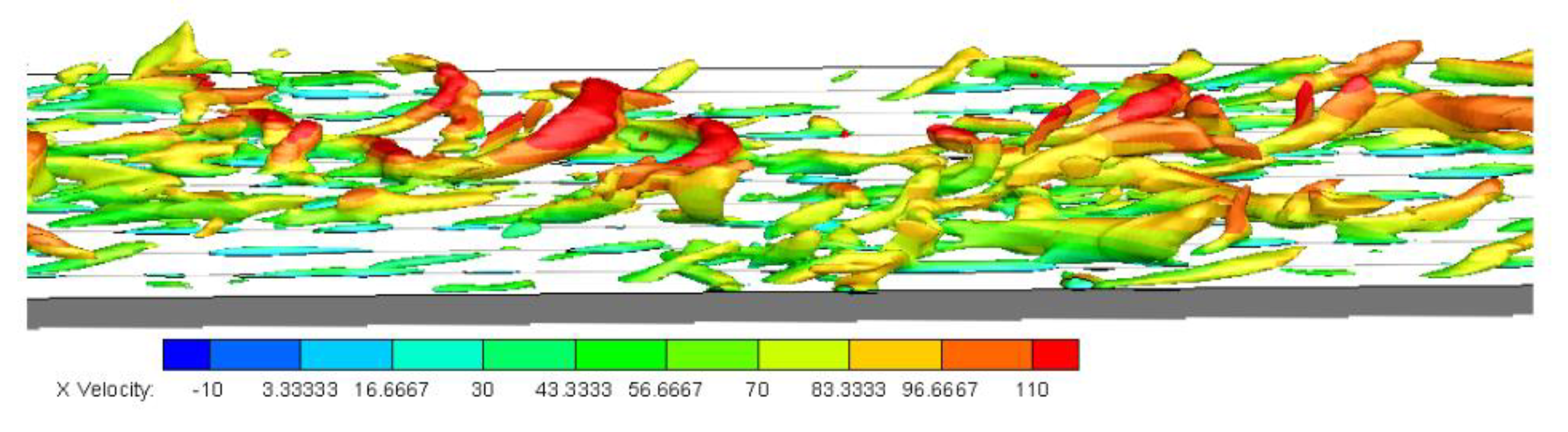
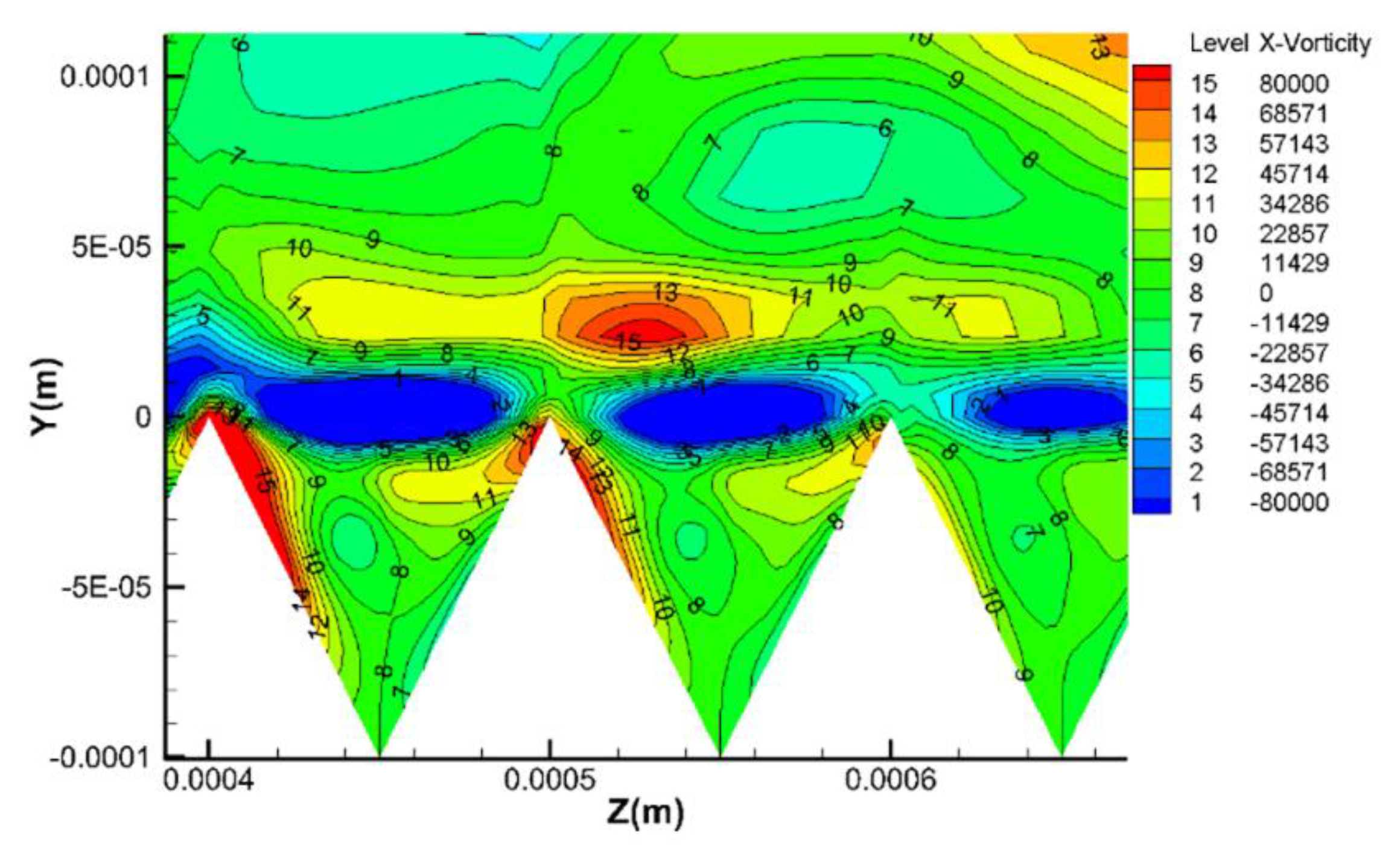
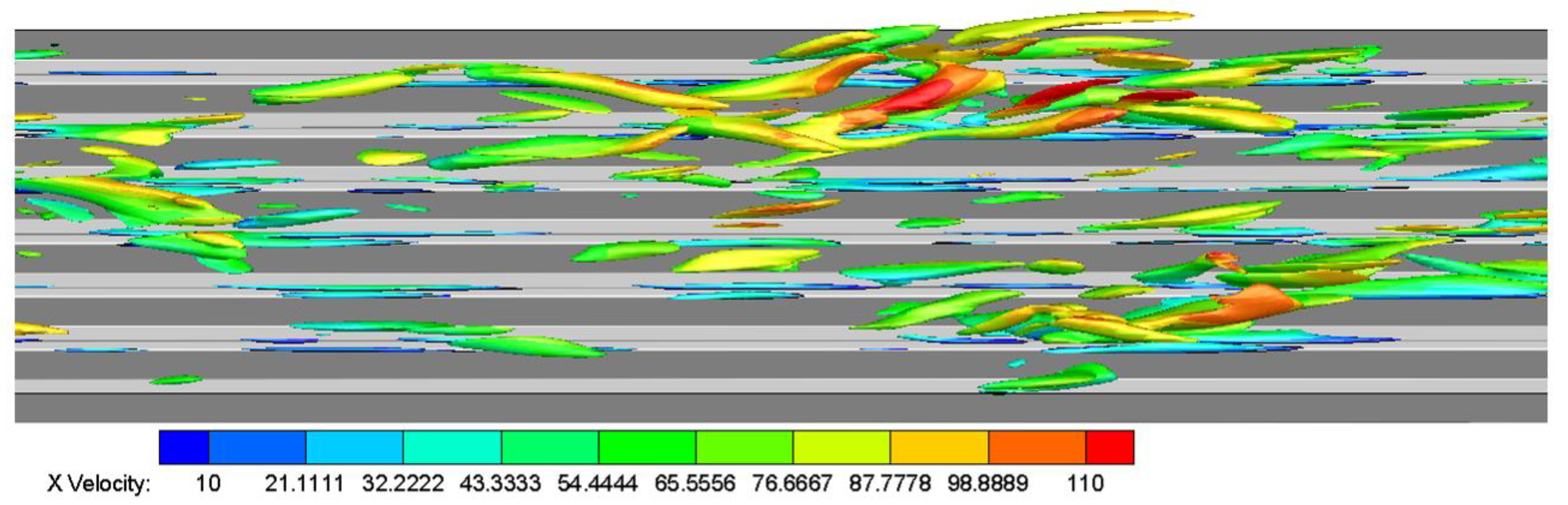
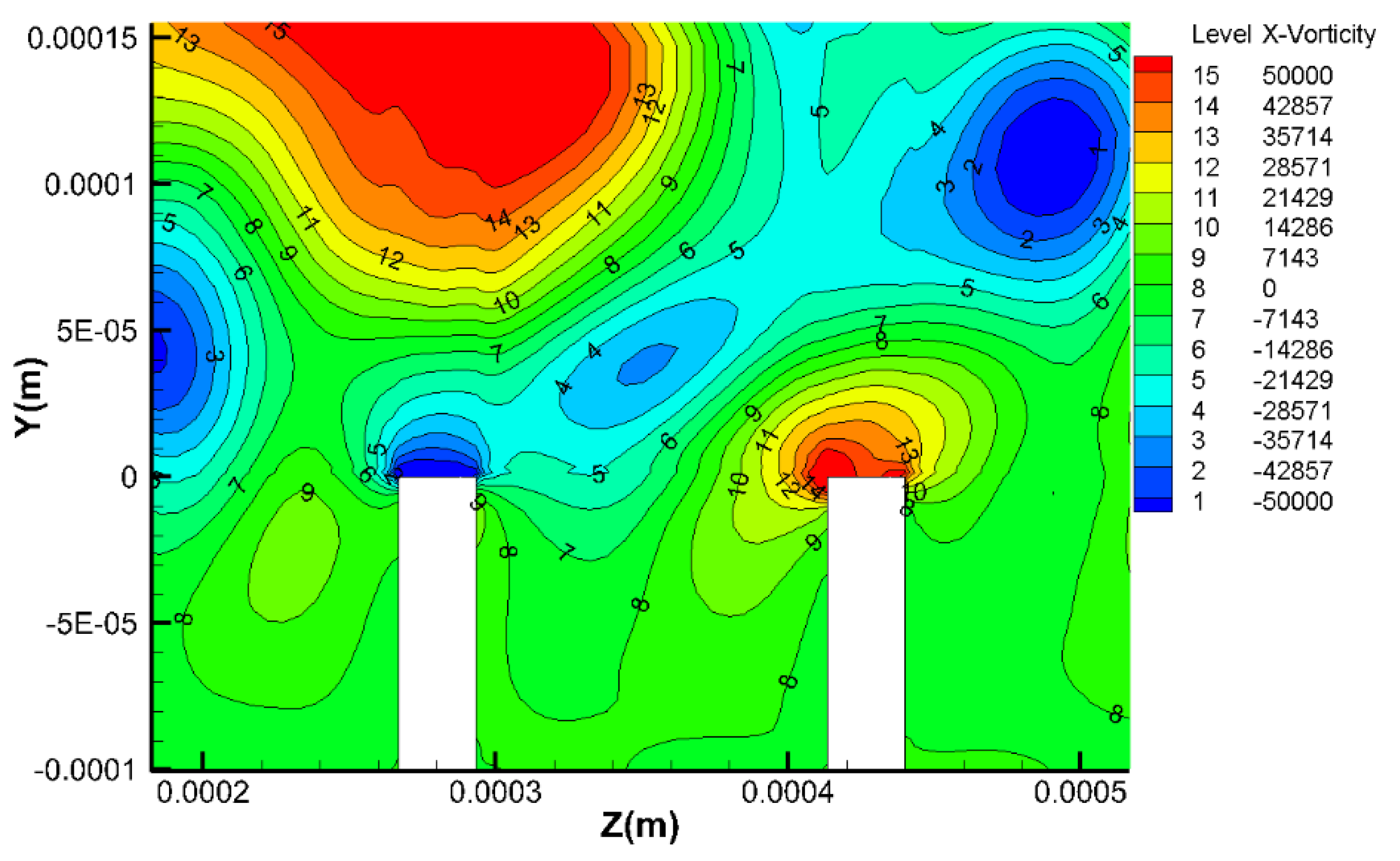
- By analyzing the velocity distribution, Reynolds stress, and flow vortices of triangular grooves, it was found that triangular grooves increase the blocking effect of the wall on the fluid, which is equivalent to increasing the thickness of the viscous bottom layer, and reduces the velocity gradient near the wall, thus reducing the wall shear stress. The variation of the height of the groove structure spanwise will affect the thickness of the boundary layer, resulting in a variation of the shear stress on the wall spanwise, and also reducing the spanwise component of the Reynolds stress, indicating that the groove structure weakens the burst on the wall. In addition, the groove structure also obstructs the spanwise flow and inhibits the occurrence of spanwise disturbance.
- (3)
- The drag reduction effect of the rectangular groove structure will appear only when the velocity is large enough that the flow vortex moves down into the groove.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schrauf, G.; Wood, N.; Gölling, B. Key aerodynamic technologies for aircraft performance improvement. In Proceedings of the 5th Community Aeronautics Days, Vienna, Austria, 19–21 June 2006. [Google Scholar]
- Liepmann, H.W. The rise and fall of ideas in turbulence. Am. Sci. 1979, 67, 221–228. [Google Scholar]
- Perlin, M.; Dowling, D.R.; Ceccio, S.L. Freeman scholar review: Passive and active skin friction drag reduction in turbulent boundary layers. J. Fluids Eng. 2016, 138, 91–104. [Google Scholar] [CrossRef]
- Tiong, A.N.T.; Kumar, P.; Saptor, A. Reviews on drag reducing polymers. Korean J. Chem. Eng. 2015, 32, 1455–1476. [Google Scholar] [CrossRef]
- Bechert, D.W.; Hoppe, G.; Reif, W.E. On the drag reduction of the shark skin. In Proceedings of the 23rd Aerospace Sciences Meeting, Reno, NV, USA, 14–17 January 1985. [Google Scholar] [CrossRef]
- Szodruch, J. Viscous drag reduction on transport aircraft. In Proceedings of the 29th Aerospace Sciences Meeting, Reno, NV, USA, 7–10 January 1991. [Google Scholar] [CrossRef]
- Brian, D.; Bharat, B.; Yang, S.; Li, S.; Tian, H.; Li, Y. Research Progress on Drag Reduction of Sharkskin Surface Fluid in Turbulent Flow. Adv. Mech. 2012, 42, 821–836. [Google Scholar] [CrossRef]
- Walsh, M.J. Turbulence Boundary Layer Drag Reduction Using riblets. In Proceedings of the AIAA 20th Aerospace Sciences Meeting, Orlando, FL, USA, 11–14 January 1982; AIAA-82. pp. 1–9. [Google Scholar] [CrossRef]
- Walsh, M.J. Riblets as a viscous drag reduction technique. AIAA J. 1983, 21, 485–486. [Google Scholar] [CrossRef]
- Walsh, M.J.; Lindemann, A.M. Optimization and Application of Riblets for Turbulent Drag Reduction. In Proceedings of the AIAA 22nd Aerospace Sciences Meeting, Reno, NV, USA, 9–12 January 1984. AIAA-84. [Google Scholar] [CrossRef]
- Hefner, J.N.; Bushnell, D.M.; Walsh, M.J. Research on non-planar wall geometries for turbulence control and skin-friction reduction. In Proceedings of the 8th U. S. -FRG DEA Meeting, Viscous and Interacting Flow Field Effects, Gottingen, Germany, 1983. [Google Scholar]
- Bacher, E.V.; Smith, C.R. A combined visualization-anemometry study of the turbulent drag reducing mechanisms of triangular micro-groove surface modifications. In Proceedings of the Shear Flow Control Conference, Boulder, CO, USA, 12–14 March 1985. [Google Scholar] [CrossRef]
- Gallagher, J.A.; Thomas, A.S.W. Turbulent boundary layer characteristics over streamwise grooves. In Proceedings of the 2nd Applied Aerodynamics Conference, Seattle, WA, USA, 21–23 August 1984. AIAA-84-2185. [Google Scholar] [CrossRef]
- Bechert, D.W.; Bruse, M.; Hage, W. Experiments with three-dimensional riblets as an idealized model of shark skin. Exp. Fluids 2000, 28, 403–412. [Google Scholar] [CrossRef]
- Park, S.R.; Wallace, J.M. Flow alteration and drag reduction by riblets in a turbulent boundary layer. AIAA J. 1994, 32, 31–38. [Google Scholar] [CrossRef]
- Gaudet, L. Properties of riblets at supersonic speed. Appl. Sci. Res. 1989, 46, 245–254. [Google Scholar] [CrossRef]
- Coustols, E.; Cousteix, J. Experimental Investigation of Turbulent Boundary Layers Manipulated with Internal Devices: Riblets. In Structure of Turbulence and Drag Reduction. International Union of Theoretical and Applied Mechanics; Gyr, A., Ed.; Springer: Berlin/Heidelberg, Germany, 1990. [Google Scholar] [CrossRef]
- Sundaram, S.; Viswanath, P.R.; Rudrakumar, S. Viscous drag reduction using riblets on NACA 0012 airfoil to moderate incidence. AIAA J. 1996, 34, 676–682. [Google Scholar] [CrossRef]
- Subashchandar, N.; Rajeev, K.; Sundaram, S. Drag Reduction Due to Riblets on NACA0012 Airfoil at Higher Angles of Attack. In National Aerospace Laboratories; Rept. PD EA 9504; National Aerospace Laboratories: Bangalore, India, 1995. [Google Scholar]
- Launder, B.E.; Li, S.P. On the Prediction of Riblet Performance with Engineering Turbulence Models. Appl. Sci. Res. 1993, 50, 283–298. [Google Scholar] [CrossRef]
- Caram, J.M.; Ahmed, A. Effect of riblets on turbulence in the wake of an airfoil. AIAA J. 1991, 29, 1769–1770. [Google Scholar] [CrossRef]
- McLean, J.D.; George-Falvy, D.N.; Sullivan, P.P. Flight-test of turbulent skin-friction reduction by riblets. In International Conference on Turbulent Drag Reduction by Passive Means; OpenSky: London, UK, 1987; pp. 408–428. [Google Scholar]
- Debisschop, J.R.; Nieuwstadt, F.T.M. Turbulent boundary layer in an adverse pressure gradient—Effectiveness of riblets. AIAA J. 1996, 34, 932–937. [Google Scholar] [CrossRef]
- Djenidi, L.; Antonia, R.A. Laser Doppler anemometer measurements of turbulent boundary layer over a riblet surface. AIAA J. 1996, 34, 1007–1012. [Google Scholar] [CrossRef]
- Dean, B.; Bhushan, B. Shark-skin surfaces for fluid-drag reduction in turbulent flow: A review. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2012, 42, 821–836. [Google Scholar] [CrossRef]
- Chu, D.C.; Karniadakis, G.E. A direct numerical simulation of laminar and turbulent flow over riblet-mounted surfaces. J. Fluid. Mech. 1993, 250, 1–42. [Google Scholar] [CrossRef] [Green Version]
- Peet, Y.; Sagaut, P.; Charron, Y. Turbulent drag reduction using sinusoidal riblets with triangular cross-section. In Proceedings of the 38th AIAA Fluid Dynamics Conference and Exhibit, Seattle, WA, USA, 23–26 June 2008; AIAA: Seattle, WA, USA, 2008; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Fu, H.; Shi, X.; Qiao, Z. Numerical analysis of drag Reduction characteristics of fringe films. J. Northwestern Polytech. Univ. 1999, 11, 25–30. [Google Scholar]
- Du, J.; Gong, M.; Tian, A.; Gao, N.; Li, Z. Research on Drag Reduction of High-speed Train Based on Bionic Non-Smooth Groove. J. Railw. Sci. Eng. 2014, 11, 70–76. [Google Scholar] [CrossRef]
- Wang, J.; Chen, G. Experimental Study on Quasi-ordered Structures in The Near Wall Region of Turbulent Boundary Layer on Groove Surface. J. Aviat. 2001, 022, 400–405. [Google Scholar] [CrossRef]
- Feng, Y.; Cong, Q.; Jin, J.; Zhang, H.; Ren, L. Numerical Analysis of Flow Field on Non-smooth Surface of Groove. J. Jilin Univ. (Eng. Sci.) 2006, 36, 103–107. [Google Scholar] [CrossRef]
- Cong, Q.; Feng, Y. Numerical Simulation of Flow Field on Triangular Groove Surface. Ship Mech. 2006, 10, 11–16. [Google Scholar] [CrossRef]
- Huang, W.; Wang, B.; Lu, M.; Chen, G.; Zhang, X. Numerical Simulation of Geometrical Shape of Trailing Wave Biomimetic Drag Reduction Material. Ship Mech. 2005, 9, 14–17. [Google Scholar] [CrossRef]
- Li, Y.; Qiao, Z.; Wang, Z. Experimental Study on Drag Reduction of Furrow Film on Outer Surface of Yun-7 Aircraft. Pneum. Exp. Meas. Control. 1995, 21–26. [Google Scholar]
- Hu, H.; Song, B.; Mao, Z.; Chen, S. Research on Drag and Noise Reduction Mechanism of Traveling Wave Surface. Fire Control. Command. Control. 2007, 32, 28–30. [Google Scholar] [CrossRef]
- Hu, H.; Song, B.; Pan, G.; Mao, Z.; Chen, S. Experimental Study on Drag Reduction of Water Tunnel with Stripe Grooves on Rotary Surface. Q. Mech. 2006, 27, 267–272. [Google Scholar] [CrossRef]
- Zhang, B. Experimental Study on Drag Reduction Mechanism of Turbulent Boundary Layer on Groove Wall. Master’s Thesis, Tianjin University, Tianjin, China, 2007. [Google Scholar]
- Chang, Y. Experimental Study on Drag Reduction Mechanism of Groove Wall in Turbulent Boundary Layer. Ph.D. Thesis, Tianjin University, Tianjin, China, 2009. [Google Scholar]
- Huang, Z. Basic Research on Shark Skin Microgroove Replication Technology Based on Structural Bionics. Master’s Thesis, Dalian University of Technology, Dalian, China, 2012. [Google Scholar]
- Sun, P. Basic Research on Drag Reduction Mechanism and Replication Technology of Shark Skin Microgrooves. Master’s Thesis, Dalian University of Technology, Dalian, China, 2010. [Google Scholar]
- Li, X.; Dong, S.; Zhao, Z. Experimental Study on Drag Reduction effect of Small Scale Trench Surface. Min. Mach. 2006, 34, 91–93. [Google Scholar]
- Liu, Z.; Hu, H.; Song, B. Numerical Simulation of Drag Reduction on Ridged Surfaces with Different Intervals. J. Syst. Simul. 2009, 21, 6025–6028. [Google Scholar]
- Roidl, B.; Meinke, M.; Schröder, W. A reformulated synthetic turbulence generation method for a zonal RANS–LES method and its application to zero-pressure gradient boundary layers. Int. J. Heat Fluid Flow 2013, 44, 28–40. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ma | Static Temperature T (K) | Characteristic Length L (m) | ||
|---|---|---|---|---|
| 0.1 | 1.225 | 1.78 × 10−5 | 288.3 | 0.0075 |
| 0.3 | ||||
| 0.5 | ||||
| 0.8 |
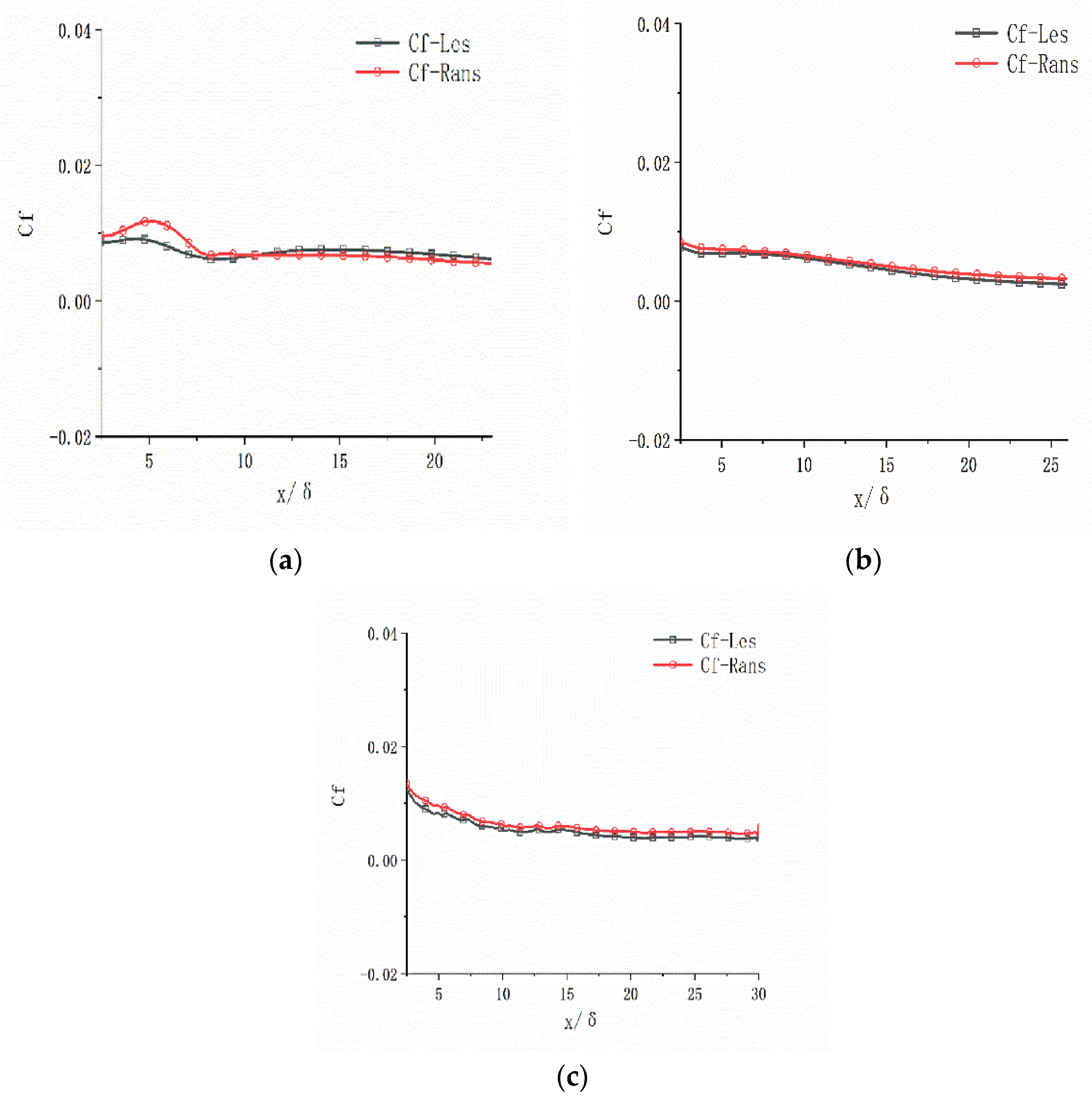
| Ma | Re | Cf-Les | Cf-Rans | Cf-Theory |
|---|---|---|---|---|
| 0.3 | 52647.47 | 0.00799 | 0.00906 | 0.00845 |
| 0.5 | 87745.79 | 0.00727 | 0.00807 | 0.0076 |
| 0.8 | 140393.3 | 0.00665 | 0.00655 | 0.00691 |
| Ma | Smooth Plate | Triangular Groove | Rectangular Groove |
|---|---|---|---|
| 0.3 | 0.007312 | 0.006767 | 0.008555 |
| 0.5 | 0.005959 | 0.005472 | 0.009364 |
| 0.8 | 0.007727 | 0.006891 | 0.007451 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, H.; Liu, S.; Chen, J.; Li, B. Study on the Characteristics of Boundary Layer Flow under the Influence of Surface Microstructure. Aerospace 2022, 9, 307. https://doi.org/10.3390/aerospace9060307
Lv H, Liu S, Chen J, Li B. Study on the Characteristics of Boundary Layer Flow under the Influence of Surface Microstructure. Aerospace. 2022; 9(6):307. https://doi.org/10.3390/aerospace9060307
Chicago/Turabian StyleLv, Hongqing, Shan Liu, Jiahao Chen, and Baoli Li. 2022. "Study on the Characteristics of Boundary Layer Flow under the Influence of Surface Microstructure" Aerospace 9, no. 6: 307. https://doi.org/10.3390/aerospace9060307
APA StyleLv, H., Liu, S., Chen, J., & Li, B. (2022). Study on the Characteristics of Boundary Layer Flow under the Influence of Surface Microstructure. Aerospace, 9(6), 307. https://doi.org/10.3390/aerospace9060307