
Trajectory Tracking Based on Active Disturbance Rejection Control for Compound Unmanned Aircraft

Abstract
:1. Introduction
2. Design of Trajectory Tracking Control Law
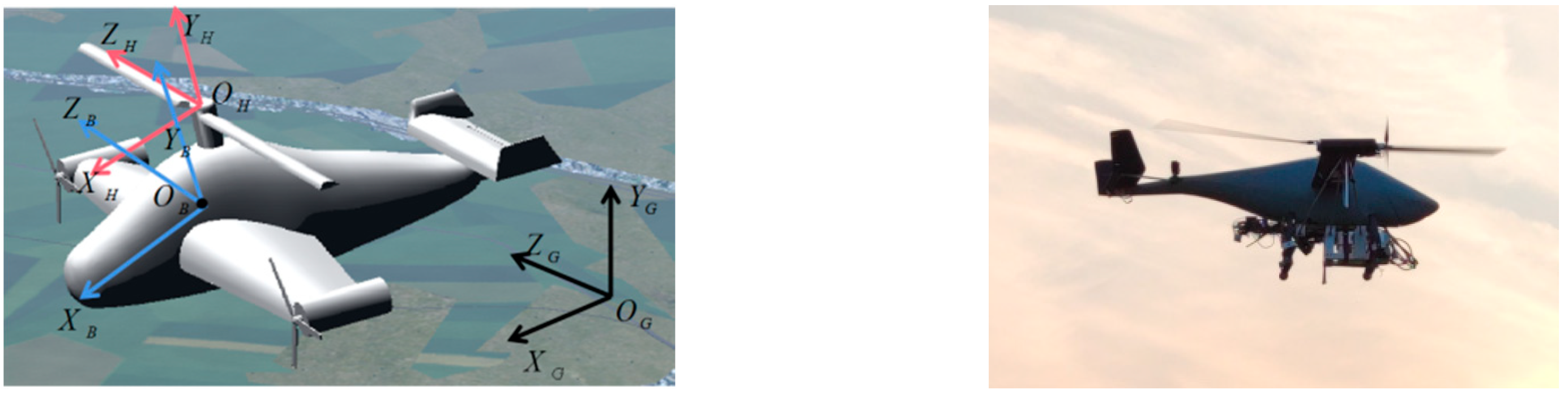
2.1. Flight Dynamics Model
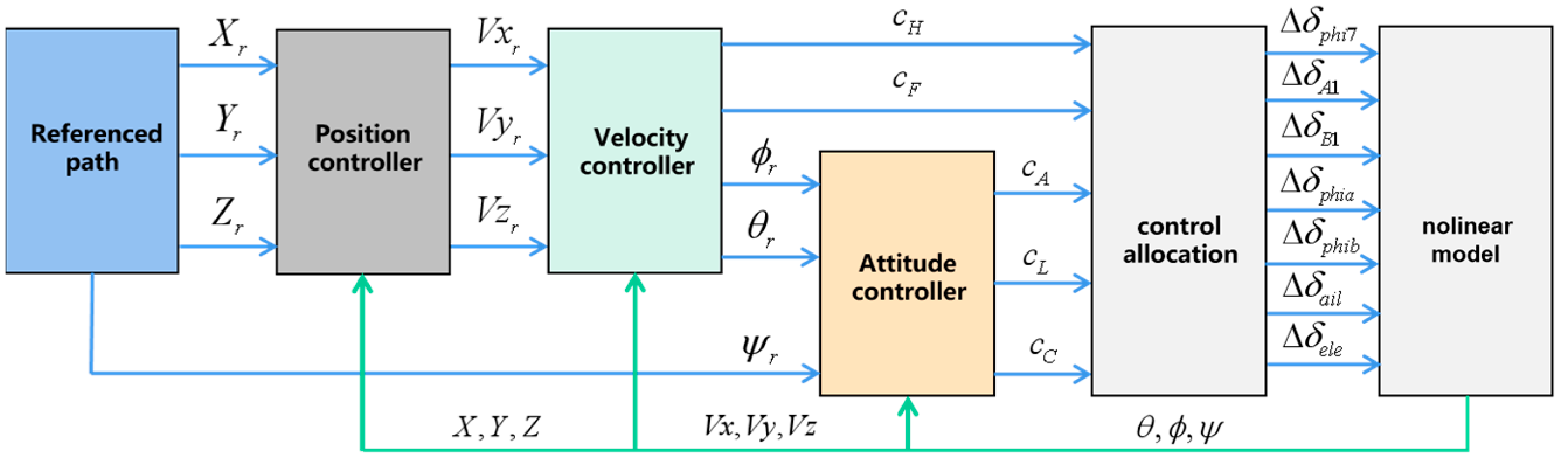
2.2. Control Strategy Design
2.3. Active Disturbance Rejection Controller
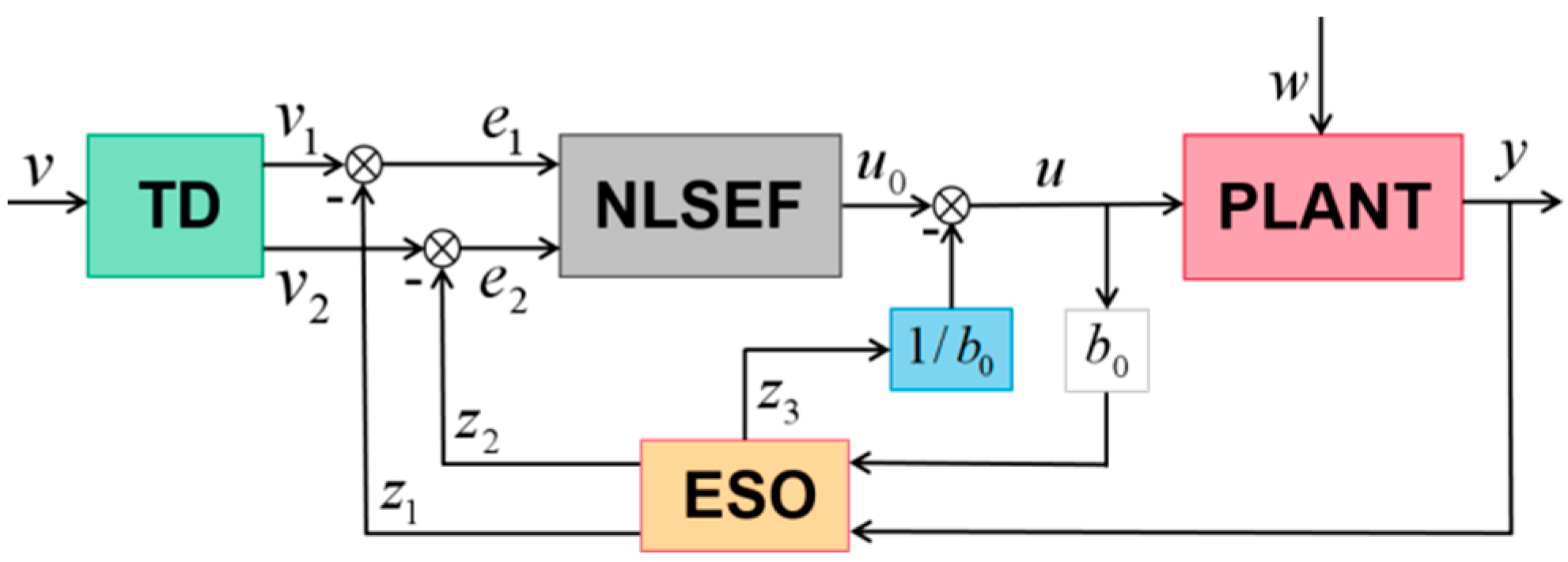
2.3.1. Basic Structure of ADRC
2.3.2. Tracking Differentiator (TD)
2.3.3. Extended State Observer
2.3.4. Nonlinear State Error Feedback Regulator (NLSEF)
2.4. Trajectory Tracking Control Law
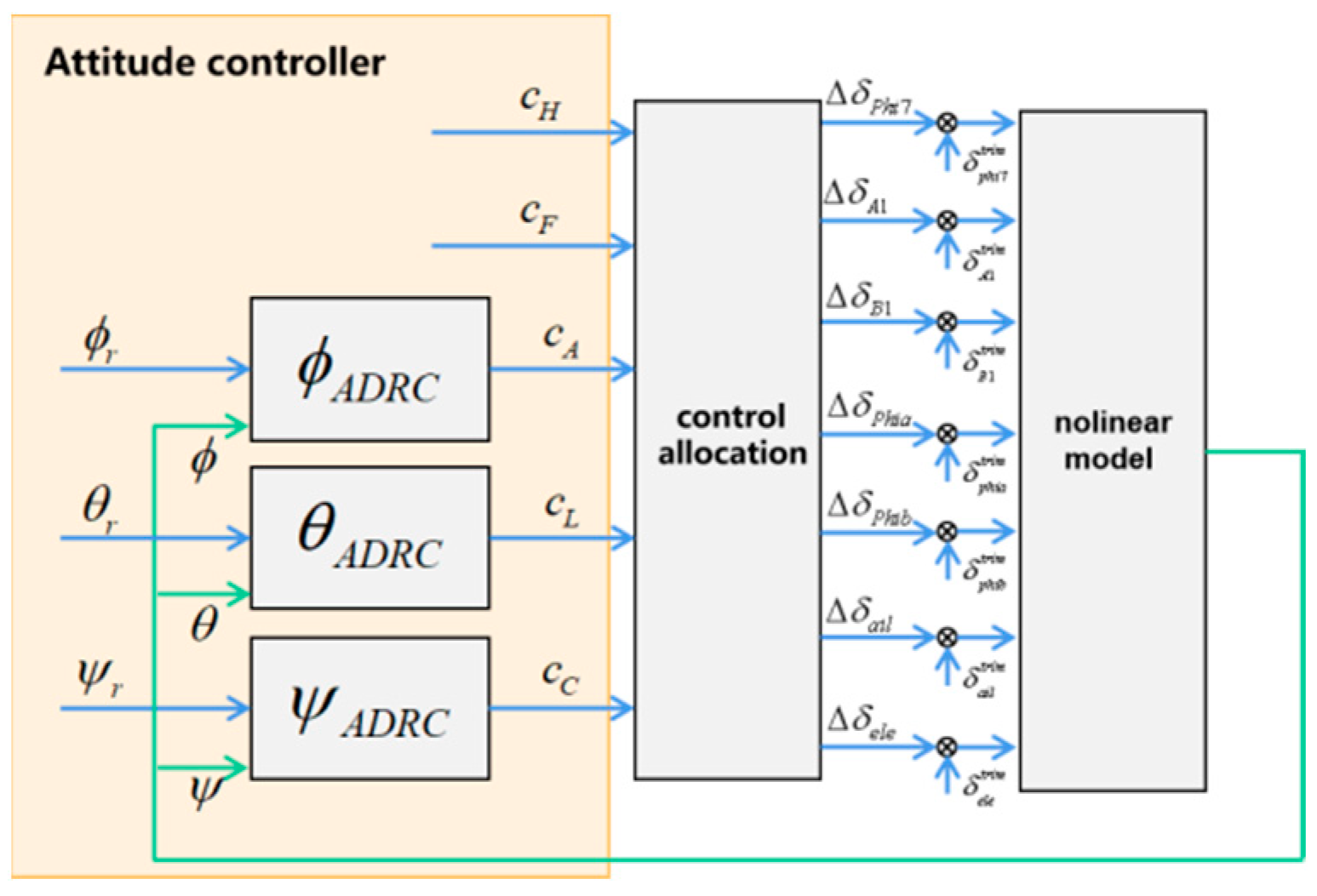
2.4.1. Attitude Control Loop
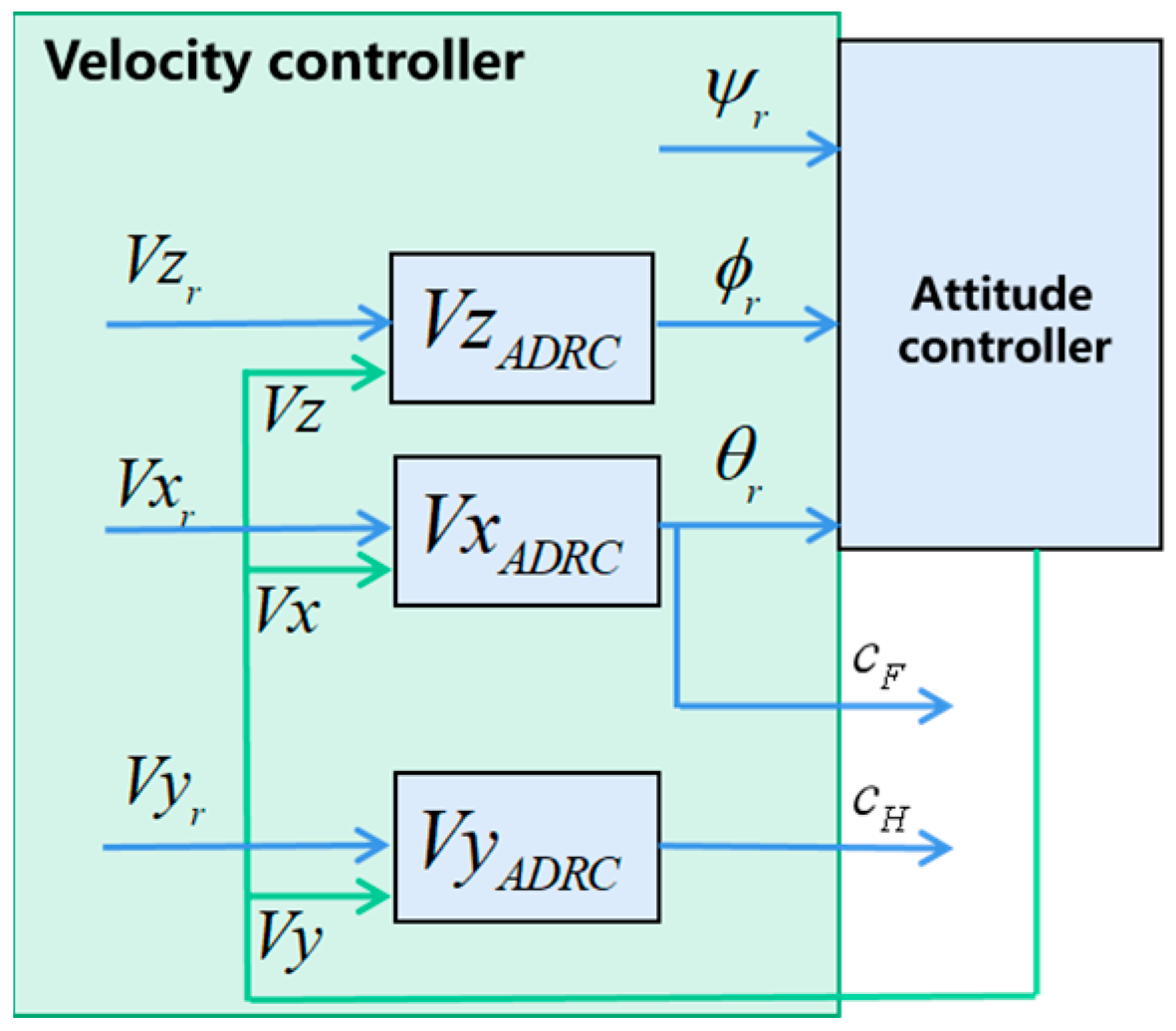
2.4.2. Velocity Control Loop
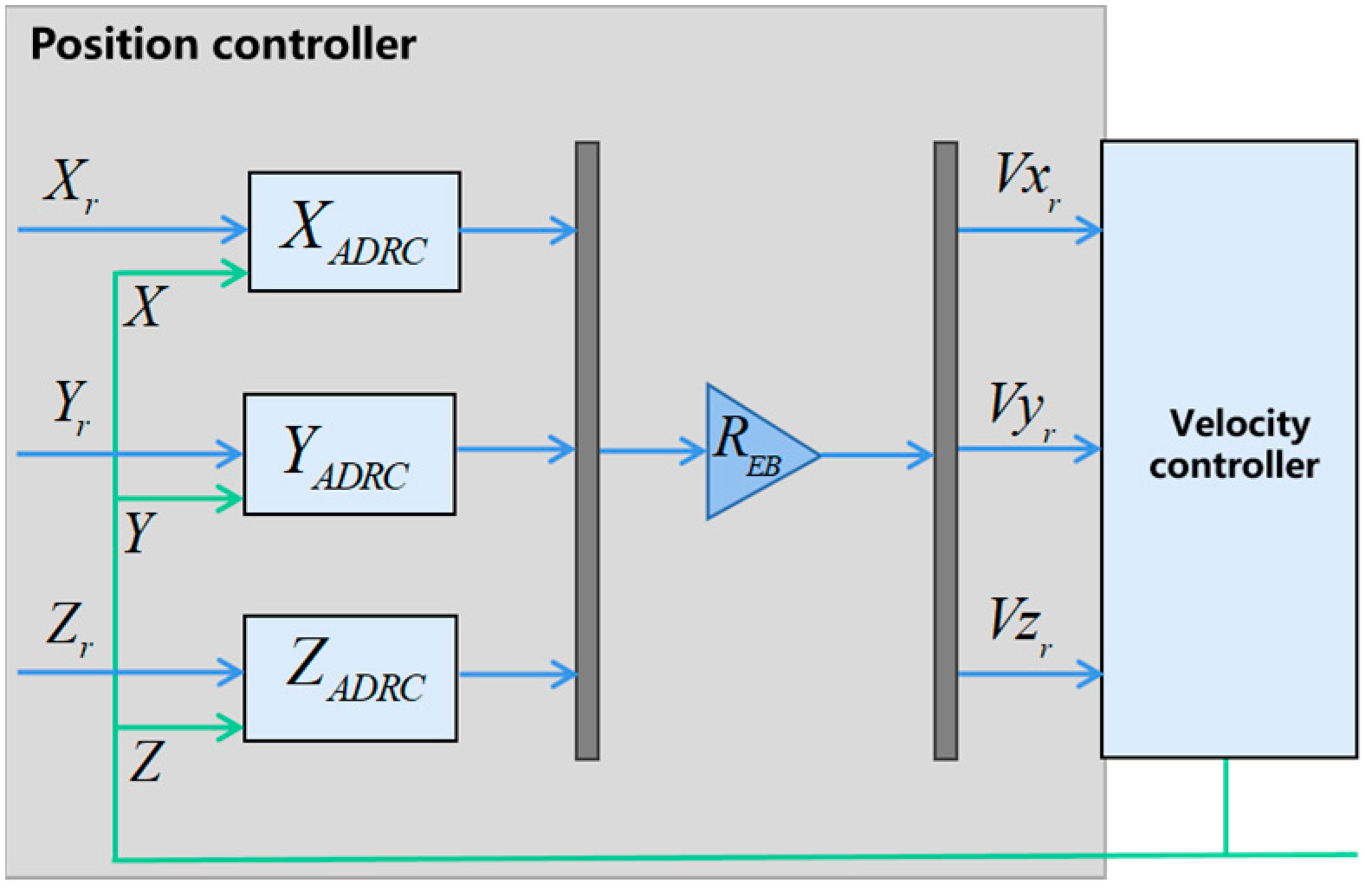
2.4.3. Position Control Loop
3. Control Parameters Tuning
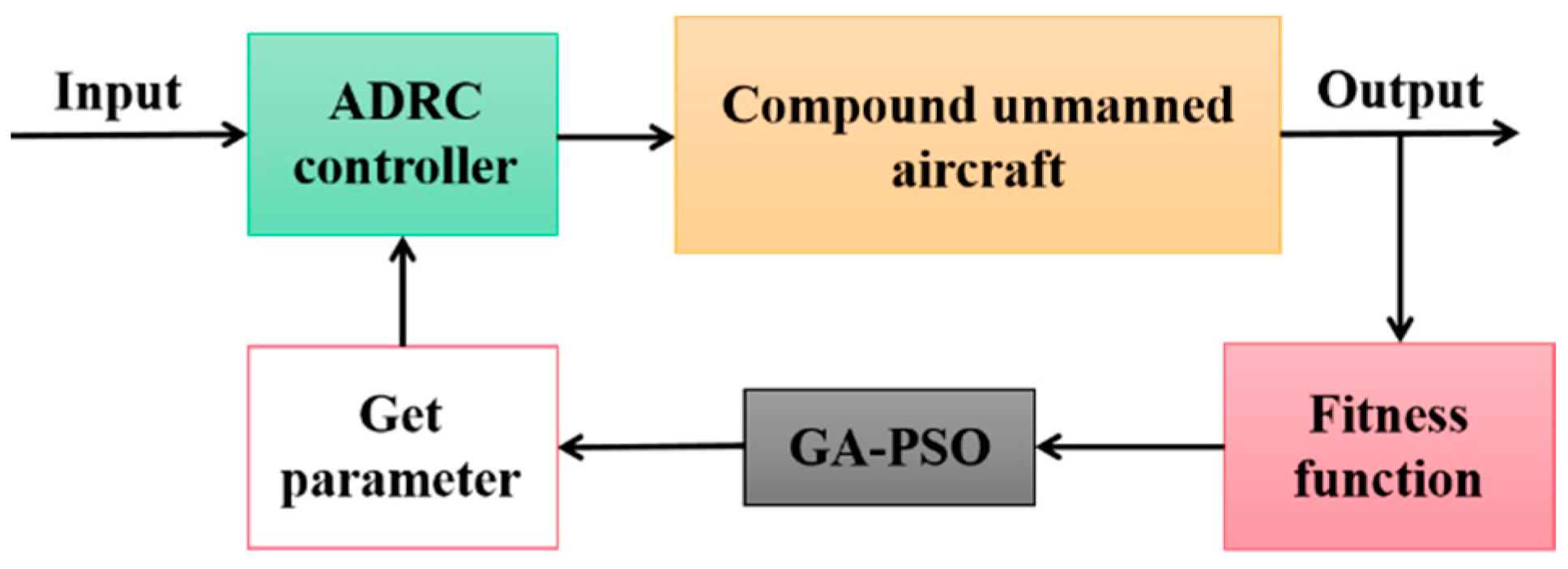
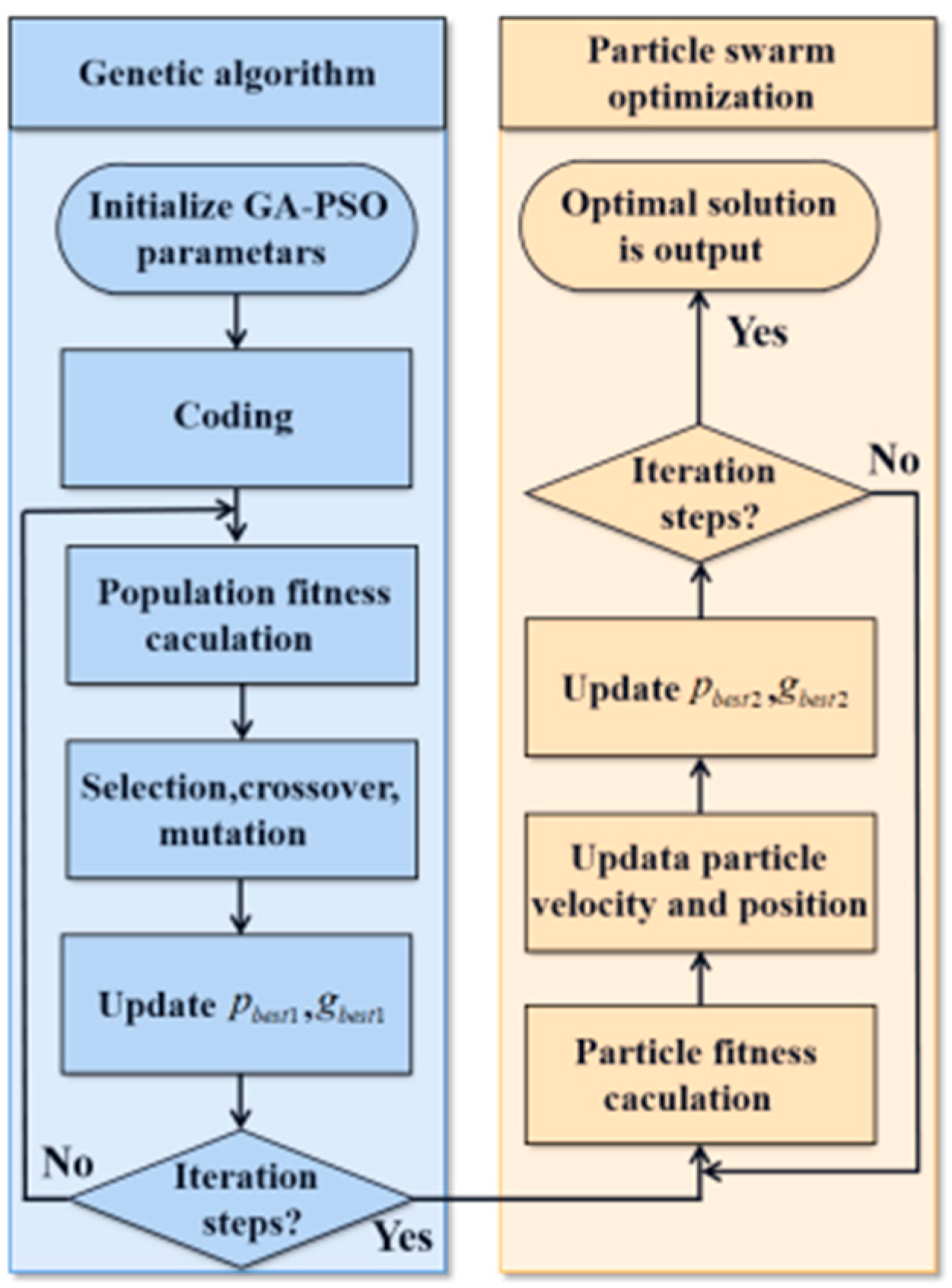
3.1. GA-PSO Algorithm
- Initialize parameters of GA-PSO algorithm, including population size, crossover probability, mutation probability and evolution times, etc.
- Encoding: Generate the initial population which initializes the ADRC parameters. The initial population is substituted into the ADRC control system as a potential solution to simulate and calculate the fitness. The fitness calculation formula is:where |ei(t)| is the absolute value of the deviation between target value and output value of the control system. N is the number of control system loops and Qi(t) is the input signal of control loop. The smaller the fitness value, the better the solution.
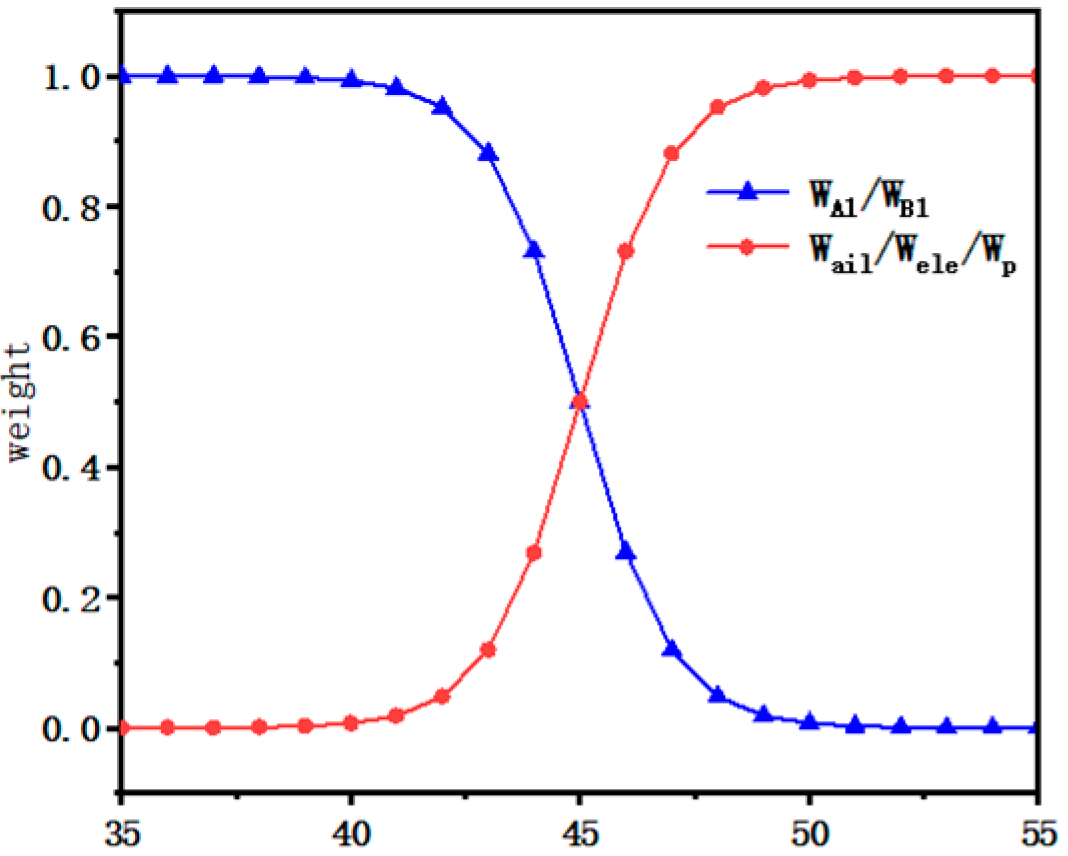
- Too large a crossover probability will increase randomness and slow convergence speed of the algorithm, and too large a mutation probability will weaken the inheritance of excellent genes. Too small a crossover probability and too small a mutation probability will cause the algorithm to easily fall into local optimization. To facilitate parameter optimization, sigmoid function is introduced to design adaptive crossover probability and mutation probability, namely:where Pcmax, Pcmin, Pmmax and Pmmin are the maximum and minimum values of crossover and mutation probability, respectively. fi is the current individual fitness and fiave is the average fitness of current population.
- After the iteration number is satisfied, the elite population obtained from the GA is substituted into the initial population of PSO to calculate the fitness.
- Update the velocity and position of the particle and determine the optimal solution of current particle and particle swarm. Then update the individual optimal solution Pbest and the global optimal solution Gbest. Too large an update speed affects the accuracy of local search, too small and the algorithm easily falls into local optimization. To facilitate parameter optimization, sigmoid function is introduced to design adaptive inertia weight coefficient of update speed, namely:where wmin and wmax are the minimum and maximum weight coefficients, respectively. fp is the current particle fitness and fpave is the average fitness of current particle swarm.
- When the iteration times are satisfied, the optimization results will be output.
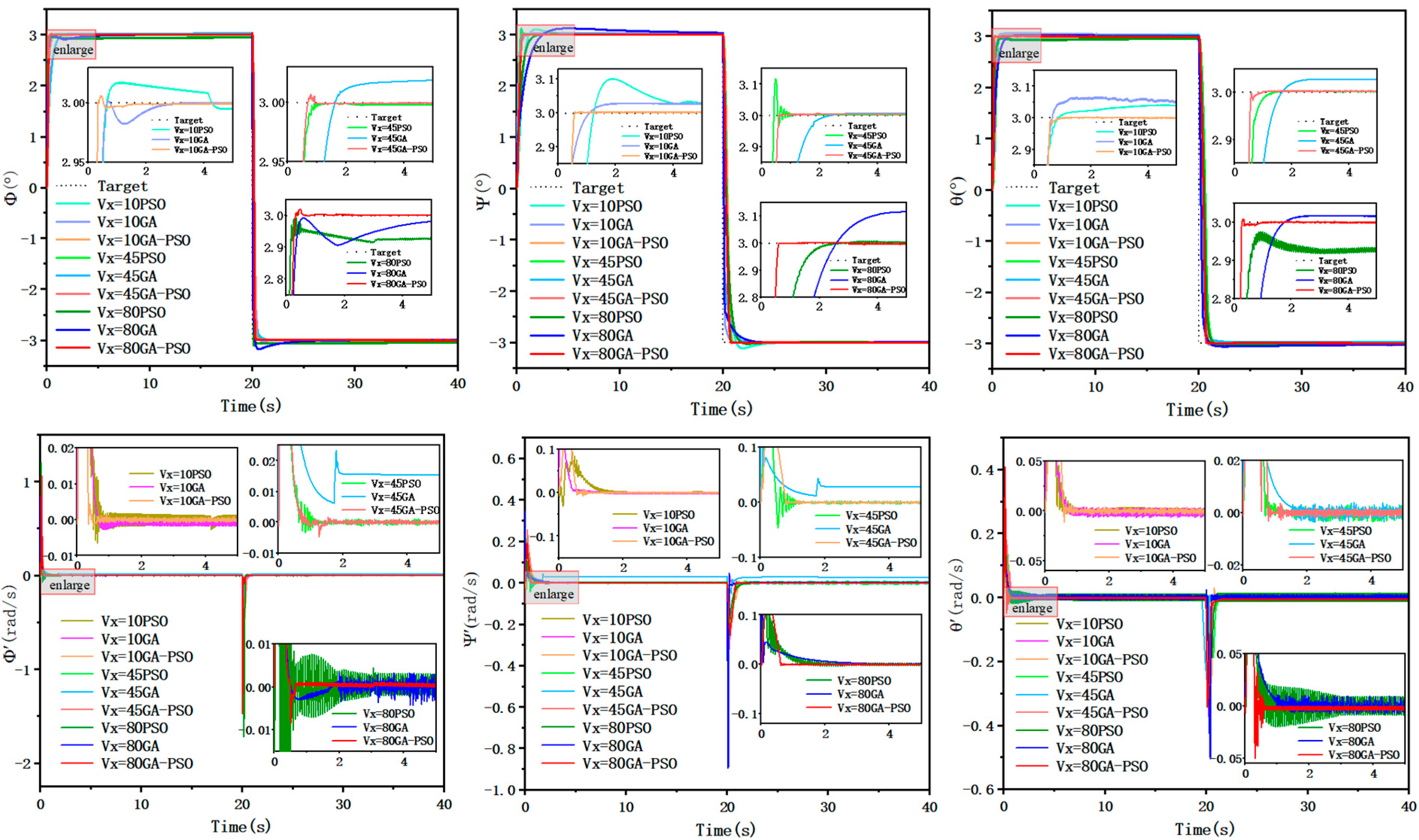
3.2. Verification. of GA-PSO Algorithm
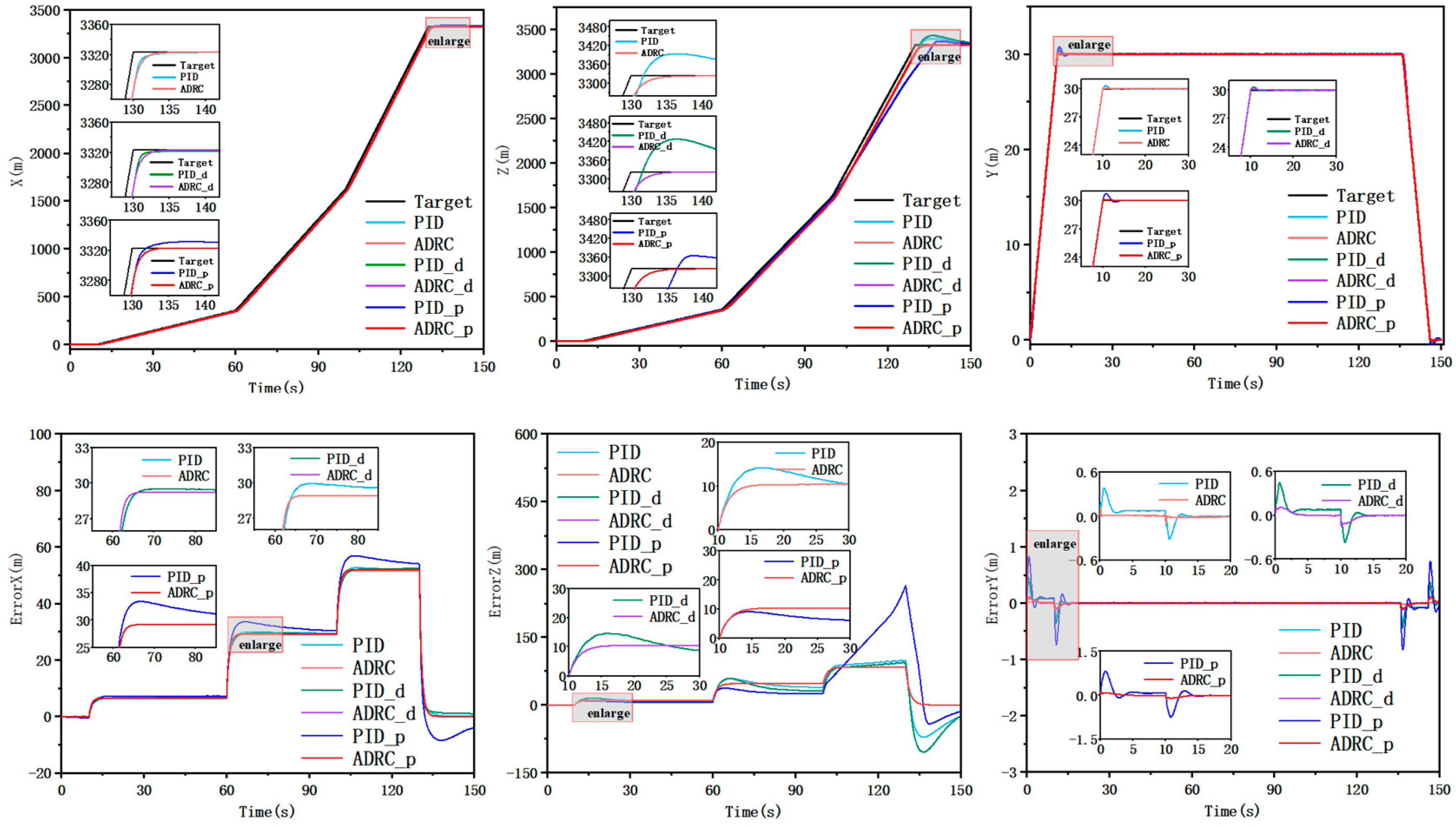
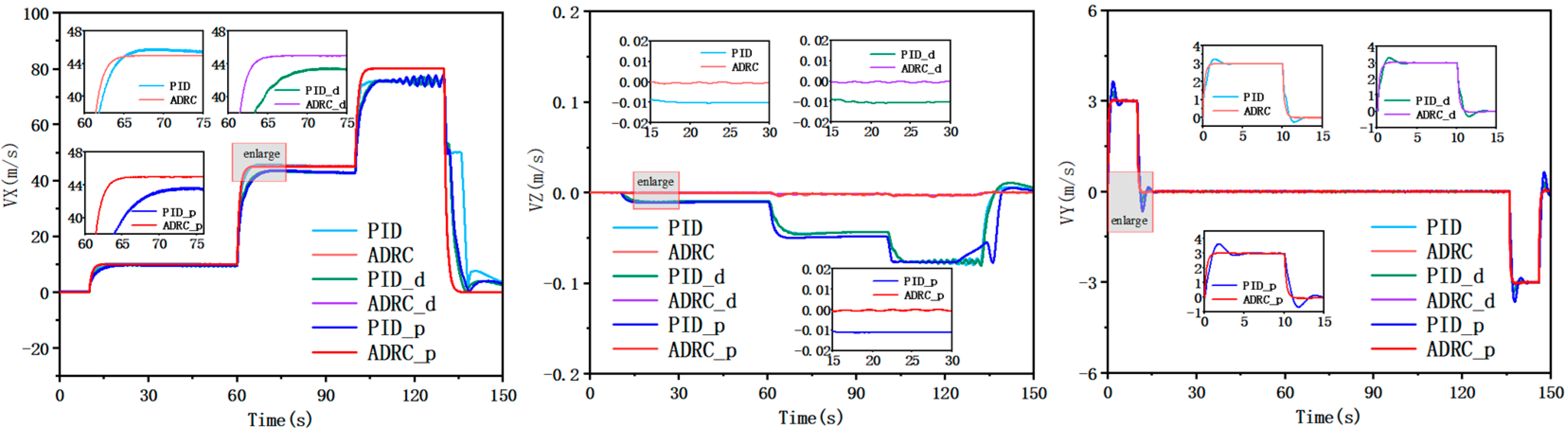
4. Trajectory Tracking Control and Result Analysis
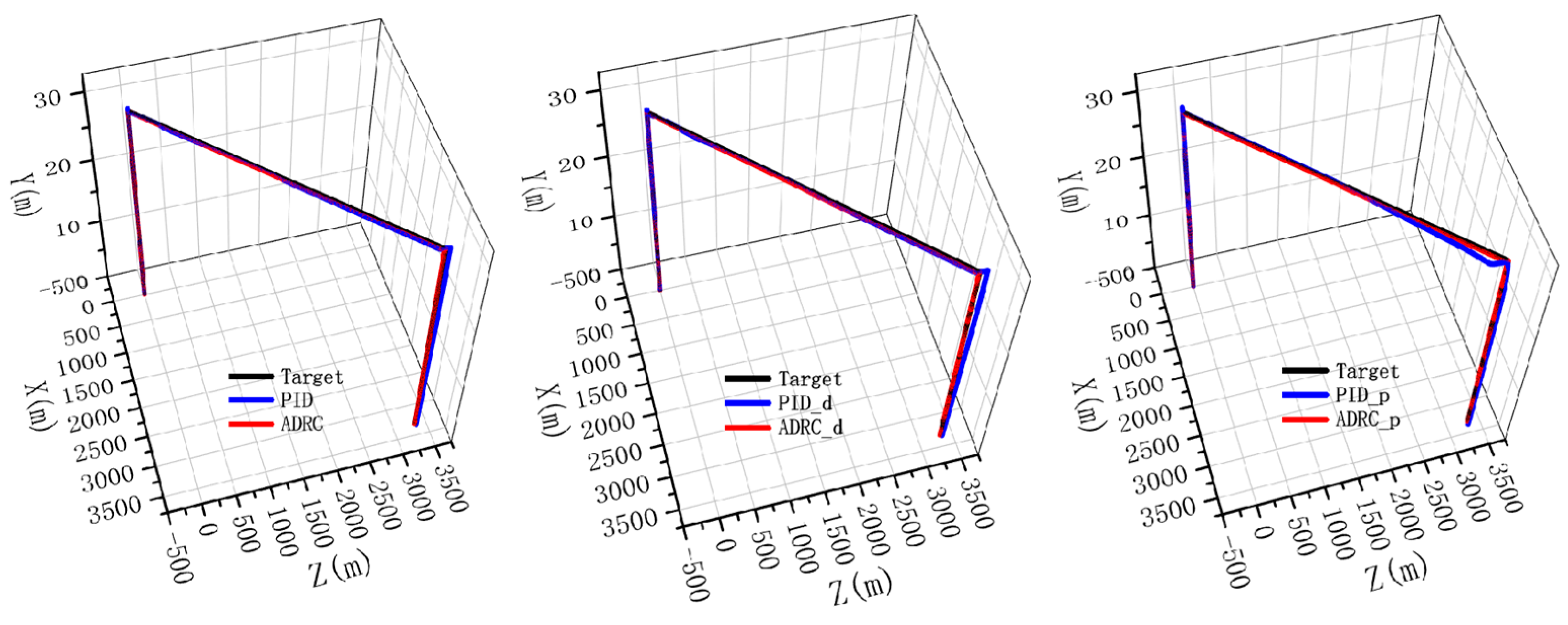
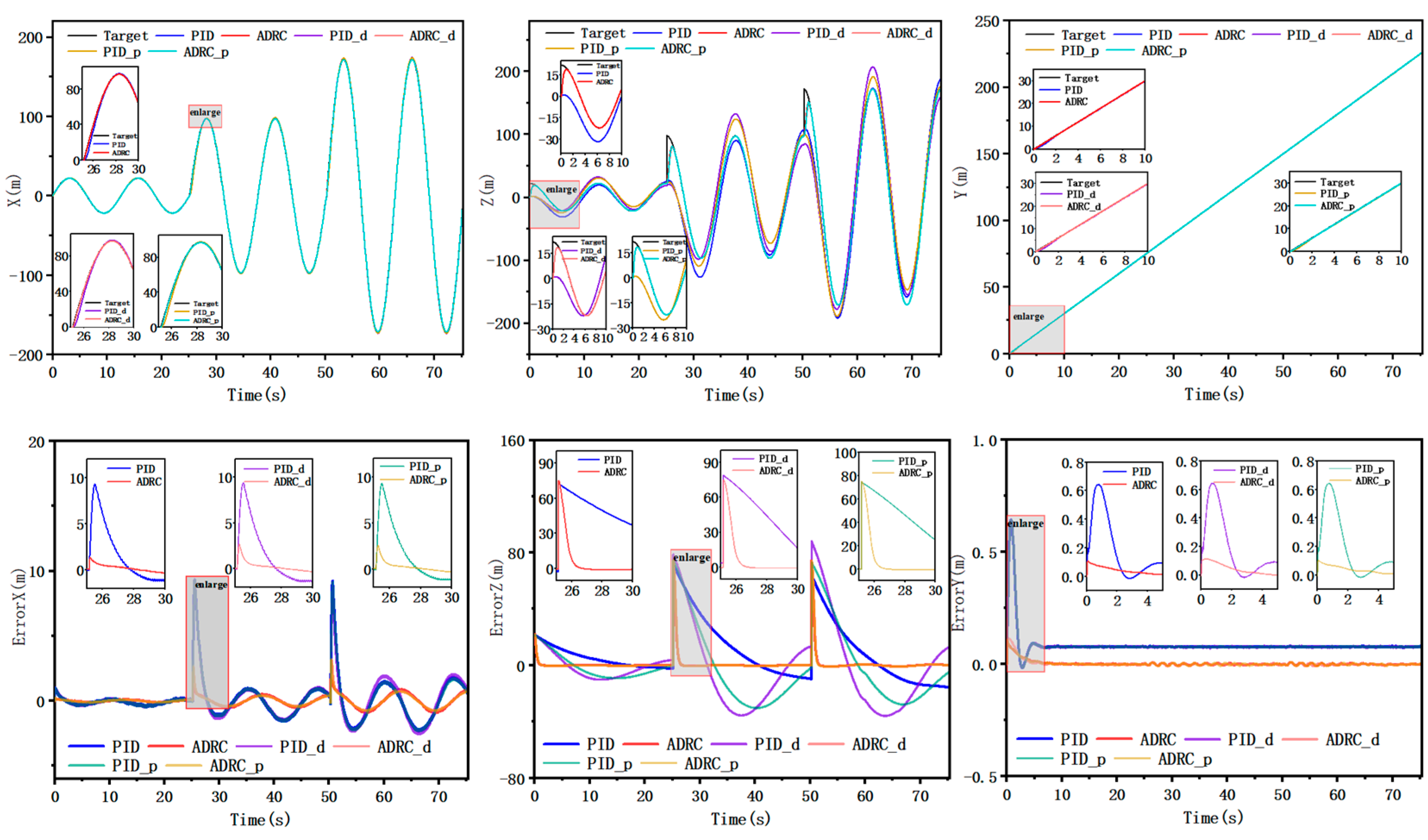
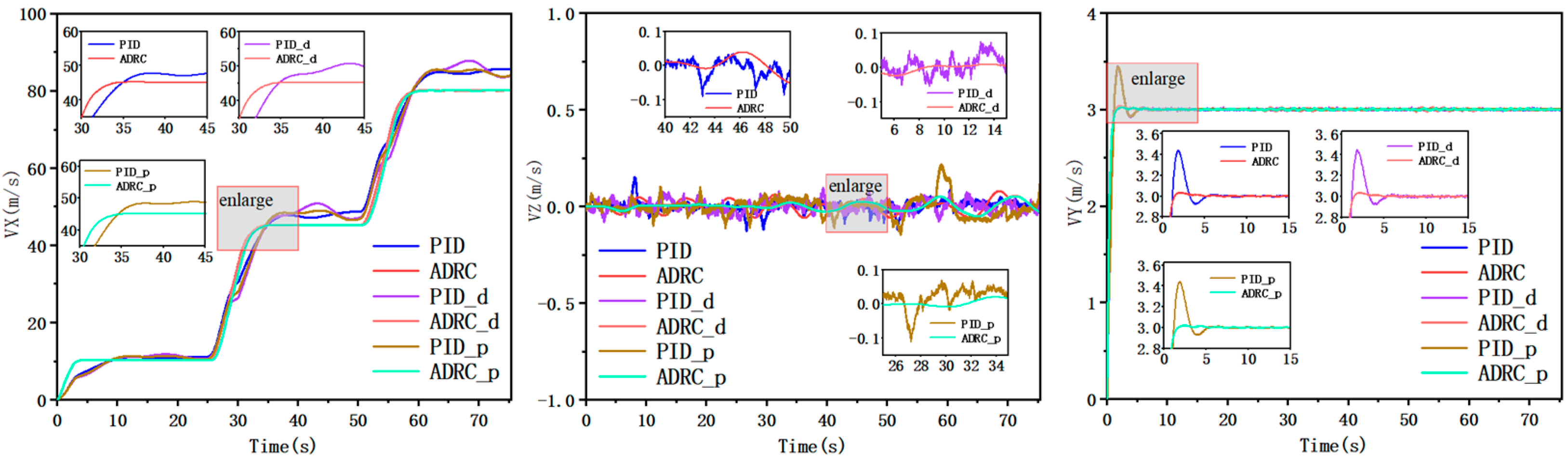
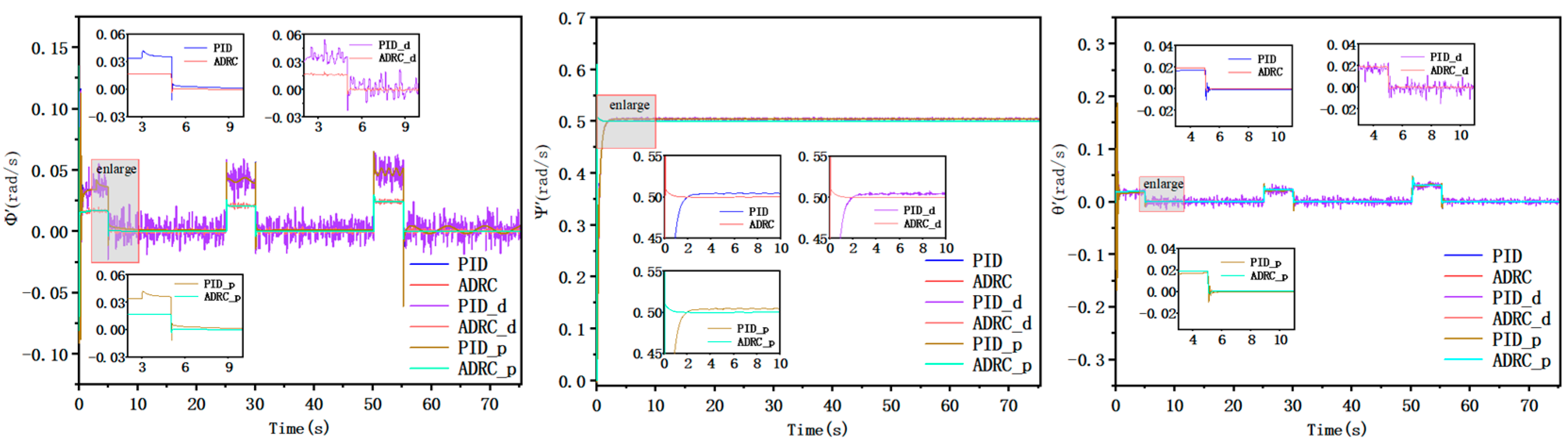
4.1. Route Tracking Control with Different Flight Modes
4.2. Climb Tracking Control with Different Flight Modes
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, F.; Chen, M. The Utility Model Relates to A Single Rotor Compound Helicopter. J. Beijing Univ. Aeronaut. Astronaut. 2016, 42, 772–779. [Google Scholar] [CrossRef]
- Zheng, F.Y.; Liu, L.W.; Cheng, Y.H. Multi-Objective Control Assignment Strategy for Complex Rotorcraft. Acta Aeronaut. Et Astronaut. Sin. 2019, 40, 1–16. [Google Scholar]
- Unal, G. Fuzzy robust fault estimation scheme for fault tolerant flight control systems based on unknown input observer. Aircr. Eng. Aerosp. Technol. 2021, 93, 1624–1631. [Google Scholar] [CrossRef]
- Topczewski, S.; Narkiewicz, J.; Bibik, P. Helicopter Control During Landing on a Moving Confined Platform. IEEE Access 2020, 8, 107315–107325. [Google Scholar] [CrossRef]
- Unal, G. Integrated design of fault-tolerant control for flight control systems using observer and fuzzy logic. Aircr. Eng. Aerosp. Technol. 2021, 93, 723–732. [Google Scholar] [CrossRef]
- Kaba, A.; Kıyak, E. Optimizing a Kalman filter with an evolutionary algorithm for nonlinear quadrotor attitude dynamics. J. Comput. Sci. 2020, 39, 1877–1882. [Google Scholar] [CrossRef]
- Chaudhary, S.; Kumar, A. Control of Twin Rotor MIMO System Using 1-Degree-of-Freedom PID, 2-Degree-of-Freedom PID and Fractional order PID Controller. In Proceedings of the 2019 3rd International Conference on Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 12–14 June 2019; pp. 746–751. [Google Scholar] [CrossRef]
- Gonzalez, H.; Arizmendi, C.; Garcia, J.; Anguo, A.; Herrera, C. Design and Experimental Validation of Adaptive Fuzzy PID Controller for a Three Degrees of Freedom Helicopter. In Proceedings of the 2018 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–6. [Google Scholar]
- Halbe, O.; Hajek, M. Robust Helicopter Sliding Mode Control for Enhanced Handling and Trajectory Following. In Proceedings of the AIAA SciTech Forum, Orlando, FL, USA, 22 July 2020; pp. 1–23. [Google Scholar] [CrossRef]
- Tangm, H.; Yang, H.; Zhou, Y. Trajectory linearization method based on sliding mode observer for unmanned helicopter trajectory tracking control. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 2929–2933. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M. Autonomous Landing of a Quadrotor on A Moving Platform. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1504–1519. [Google Scholar] [CrossRef]
- Lu, X.; Zang, X.; Meng, X.; Wang, H. ADRC Based Attitude Control System Design for Unmanned Helicopter. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; pp. 309–313. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, Z.; Lyu, Z.; Li, J.; Yang, Y.; Li, Y. Research on Manipulation Strategy and Flight Test of the Quad Tilt Rotor in Conversion Process. IEEE Access 2021, 9, 40286–40307. [Google Scholar] [CrossRef]
- Santos, M.; Juan, M.; Alejandro, J.; Andrés, C. Active Disturbance Rejection Control for UAV Hover using ROS. In Proceedings of the 2018 XX Congreso Mexicano de Robótica (COMRob), Ensenada, Mexico, 12–14 September 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Issac, T.; Thomas, F.; Mija, S.J. Trajectory Tracking of Unmanned Helicopter Using Optimized Integral LQR Controller. In Proceedings of the 2020 Fourth International Conference on Inventive Systems and Control (ICISC), Coimbatore, India, 8–10 January 2020; pp. 324–328. [Google Scholar] [CrossRef]
- Wu, Z.; Zhou, H.; Guo, B. Review and new theoretical perspectives on active disturbance rejection control for uncertain finite-dimensional and infinite-dimensional systems. Nonlinear Dyn. 2020, 101, 935–959. [Google Scholar] [CrossRef]
- Zhou, X.; Zhong, W.; Ma, Y.; Guo, K.; Yin, J.; Wei, C. Control Strategy Research of D-STATCOM Using Active Disturbance Rejection Control Based on Total Disturbance Error Compensation. IEEE Access 2021, 9, 50138–50150. [Google Scholar] [CrossRef]
- Zhou, R.; Fu, C.; Tan, W. Implementation of Linear Controllers via Active Disturbance Rejection Control Structure. IEEE Trans. Ind. Electron. 2021, 68, 6217–6226. [Google Scholar] [CrossRef]
- Ding, L.; Ma, R.; Wu, H.; Feng, C.; Li, Q. Yaw Control of an Unmanned Aerial Vehicle Helicopter Using Linear Active Disturbance Rejection Control. SAGE J. 2017, 231, 427–435. [Google Scholar] [CrossRef]
- Duan, D.; Wang, Z.; Li, J.; Zhang, C.; Wang, Q. Stabilization control for unmanned helicopter-slung load system based on active disturbance rejection control and improved sliding mode control. SAGE J. 2021, 235, 1803–1816. [Google Scholar] [CrossRef]
- Dai, J.; Hu, F.; Ying, J. Research on Attitude Control Algorithm Based on Improved Linear Active Disturbance Rejection Control for Unmanned Helicopter. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 1498–1503. [Google Scholar] [CrossRef]
- Shen, S.Y.; Xu, J.F. Adaptive Neural Network-Based Active Disturbance Rejection Flight Control of An Unmanned Helicopter. Aerosp. Sci. Technol. 2021, 1, 2–11. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Y.; Zhang, Y. Optimization of ADRC Parameters Based on Particle Swarm Optimization Algorithm. In Proceedings of the 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 18–20 June 2021; pp. 1956–1959. [Google Scholar] [CrossRef]
- Zhang, D.; Duan, H.; Yang, Y. Active disturbance rejection control for small unmanned helicopters via Levy flight-based pigeon-inspired optimization. Aircr. Eng. Aerosp. Technol. 2017, 89, 946–952. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Chen, Z.; Zheng, Y. Optimal Design of Load Frequency Active Disturbance Rejection Control via Double-Chains Quantum Genetic Algorithm. Neural Comput. Applic 2021, 33, 3325–3345. [Google Scholar] [CrossRef]
- Shen, S.Y.; Xu, J.F. Trajectory Tracking Active Disturbance Rejection Control of the Unmanned Helicopter and Its Parameters Tuning. IEEE Access 2021, 9, 56773–56785. [Google Scholar] [CrossRef]
- Kumar, A.; Ben-Tzvi, P. Estimation of Wind Conditions Utilizing RC Helicopter Dynamics. IEEE/ASME Trans. Mechatron. 2019, 24, 2293–2303. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Parameter | Name | Parameter |
|---|---|---|---|
| Take-off weight | 20 kg | Rotor radius | 0.72 m |
| Rotor speed | 1600 r/min | Propeller radius | 0.16 m |
| Num of rotor blades | 2 | Num of Propeller blades | 3 |
| Control Channel | Helicopter | Transition | Airplane |
|---|---|---|---|
| Yaw attitude | propeller speed | propeller speed | propeller speed |
| Roll attitude | lateral pitch | lateral pitch, aileron | aileron |
| Pitch attitude | longitudinal pitch | longitudinal pitch, elevator | elevator |
| Forward velocity | longitudinal pitch | longitudinal pitch, propeller speed | propeller speed |
| Vertical velocity | collective pitch | elevator, collective pitch | elevator, collective pitch |
| Parameter | Description | GA-PSO |
|---|---|---|
| NG | Evolution number of GA | 100 |
| sizepop | Population size of GA | 80 |
| swarmsize | Particles number | 80 |
| D | Parameters tuning number | 30 |
| c1 | Speed factor | 1.49 |
| c2 | Speed factor | 1.49 |
| Controller | r | h | [β1, β2] | τ | δ | [β01, β02, β03] | b |
|---|---|---|---|---|---|---|---|
| ΦGA-PSO | 2.2 | 0.92 | [2500, 10] | 55 | 45.3 | [65, 3500, 2.9] | 6.5 |
| ΨGA-PSO | 2 | 2 | [9500, 0.5] | 35 | 0.005 | [3, 20, 0.1] | 0.05 |
| θGA-PSO | 2 | 3 | [11.28, 30] | 5.8 | 0.6 | [9, 20.5, 0.5] | 8.8 |
| ΦGA | 5 | 0.92 | [5000, 10] | 30 | 30 | [19.65, 1082, 11] | 1 |
| ΨGA | 2 | 2 | [9500, 0.5] | 35.3 | 0.01 | [3, 20, 0.1] | 0.05 |
| θGA | 5 | 1 | [139, 22] | 26.9 | 300 | [9, 20.5, 0.1] | 8.8 |
| ΦPSO | 2.2 | 0.9 | [6000, 15] | 52 | 45 | [55, 3300, 2.9] | 3.5 |
| ΨPSO | 2 | 2 | [9500, 0.5] | 35 | 0.005 | [3, 20, 0.1] | 0.05 |
| θPSO | 2 | 3 | [10.5, 30] | 5.2 | 1 | [8, 18.5, 0.8] | 5.5 |
| Controller | Ψ | Φ | θ | Vx | Vy | Vz | X | Y | Z | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| kp | 1500 | 150 | 15 | 500 | 200 | 5.2 | 2000 | 100 | 500 | 120 | 30 | 55 |
| ki | 10 | 30 | 0 | 0 | 0 | 0.3 | 50 | 30 | 125 | 0.01 | 12 | 1.1 |
| kd | 100 | 1 | 5 | 0 | 0 | 0 | 0 | 0 | 115 | 30 | 5 | 100 |
| Controller | r | h | [β1, β2] | τ | δ | [β01, β02, β03] | b |
|---|---|---|---|---|---|---|---|
| Φ | 20 | 5 | [3000, 100] | 80 | 20 | [31, 5000, 50] | 15 |
| Ψ | 300 | 1.2 | [60, 20,000] | 1000 | 10 | [80, 20,000, 20,000] | 80 |
| θ | 5 | 150 | [500, 50] | 15 | 5 | [15, 120, 100] | 0.1 |
| Vx | 5 | 1 | [1000, 100] | 500 | 80 | [180, 150, 5] | 0.2 |
| Vy | 5 | 150 | [500, 20] | 30 | 0.5 | [20, 200, 50] | 0.1 |
| Vz | 30 | 10 | [1500, 200] | 80 | 1 | [2, 163, 15] | 6 |
| X | 10 | 2 | [1200, 80] | 1000 | 5 | [35, 120, 5] | 20 |
| Y | 20 | 5 | [50, 10] | 200 | 2 | [10, 60, 100] | 0.5 |
| Z | 30 | 15 | [12.5, 72] | 165 | 100 | [12, 3500, 100] | 26 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, B.; Xu, J. Trajectory Tracking Based on Active Disturbance Rejection Control for Compound Unmanned Aircraft. Aerospace 2022, 9, 313. https://doi.org/10.3390/aerospace9060313
Deng B, Xu J. Trajectory Tracking Based on Active Disturbance Rejection Control for Compound Unmanned Aircraft. Aerospace. 2022; 9(6):313. https://doi.org/10.3390/aerospace9060313
Chicago/Turabian StyleDeng, Bohai, and Jinfa Xu. 2022. "Trajectory Tracking Based on Active Disturbance Rejection Control for Compound Unmanned Aircraft" Aerospace 9, no. 6: 313. https://doi.org/10.3390/aerospace9060313
APA StyleDeng, B., & Xu, J. (2022). Trajectory Tracking Based on Active Disturbance Rejection Control for Compound Unmanned Aircraft. Aerospace, 9(6), 313. https://doi.org/10.3390/aerospace9060313