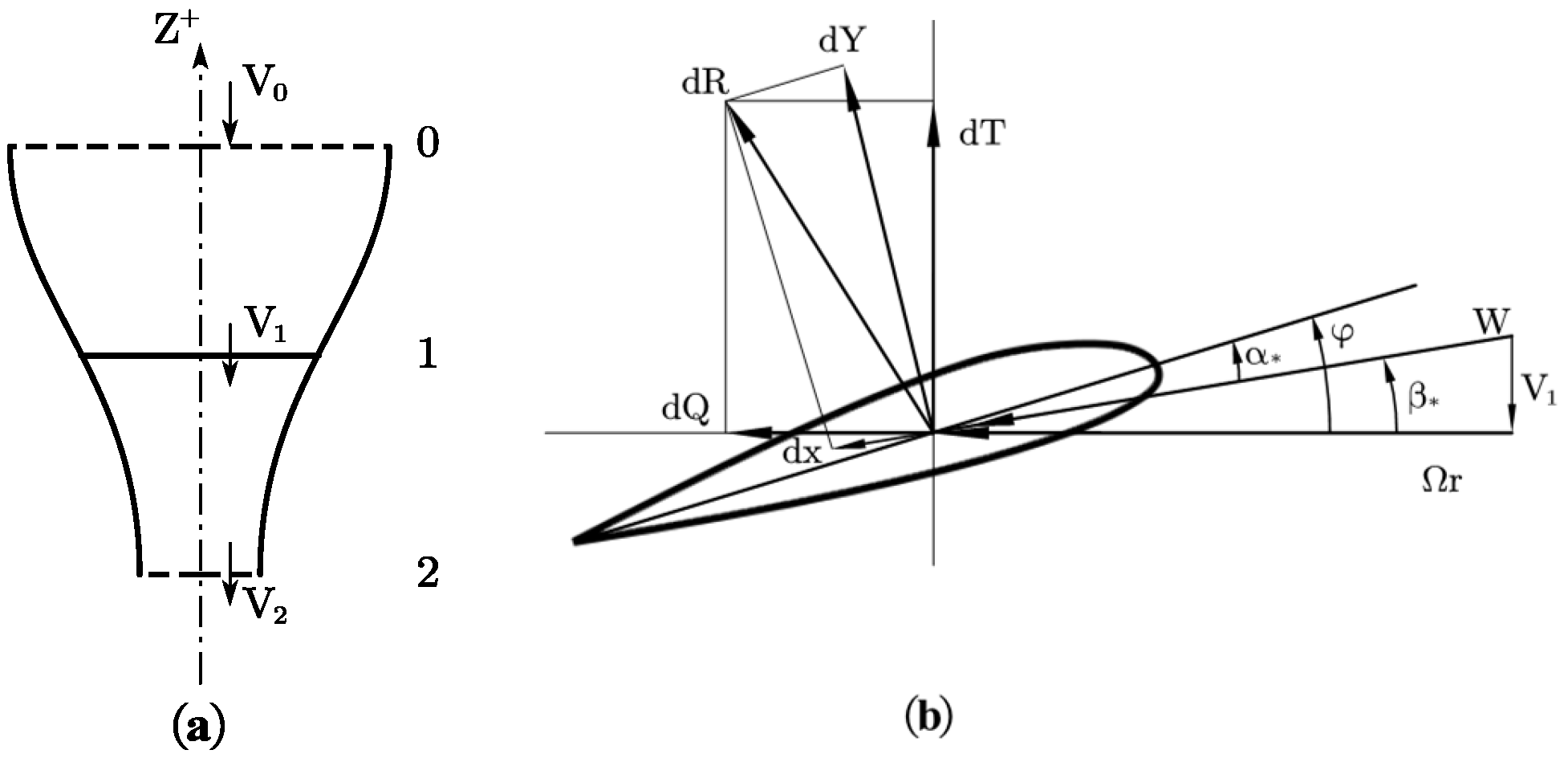
Figure 1.
Rotor’s airflow in the momentum-element model. (a) Momentum theory description. (b) Element theory description.
Figure 1.
Rotor’s airflow in the momentum-element model. (a) Momentum theory description. (b) Element theory description.
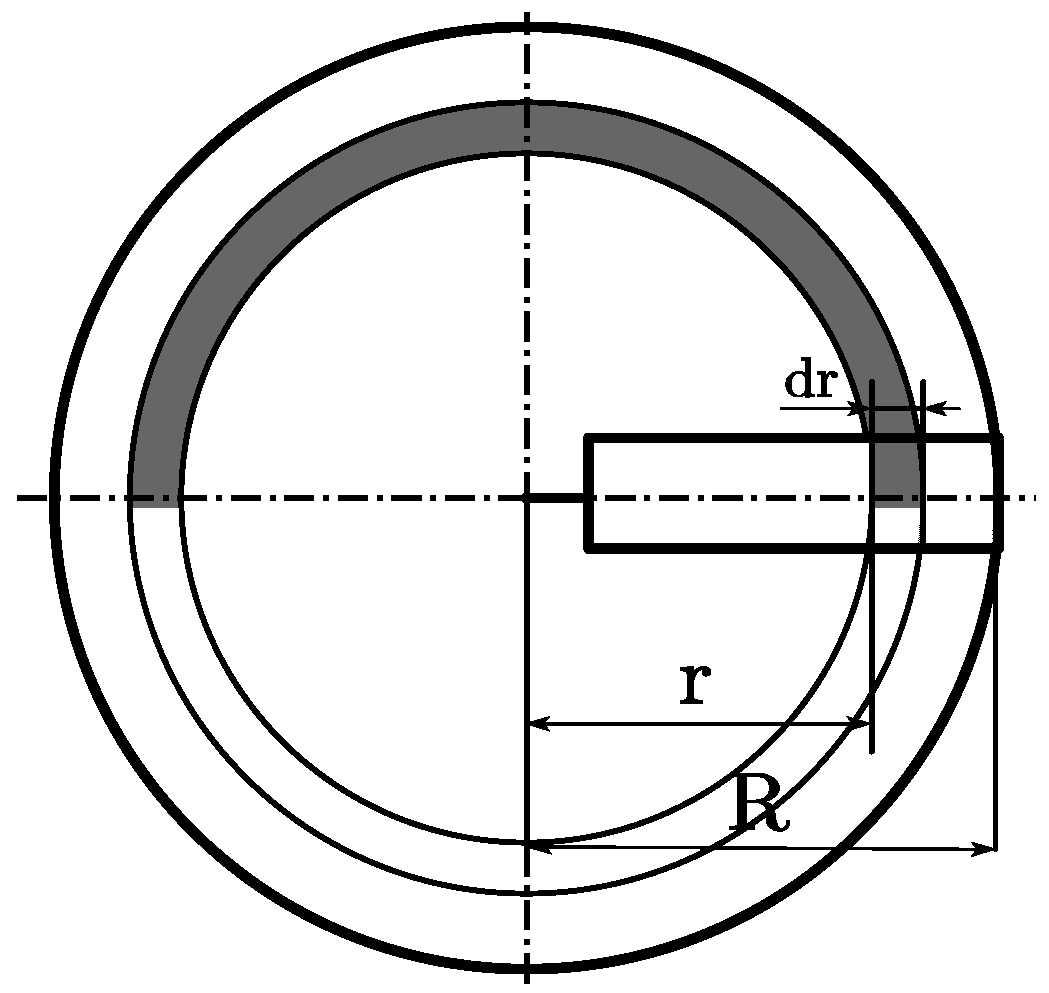
Figure 2.
The circular element in the momentum-element model.
Figure 2.
The circular element in the momentum-element model.
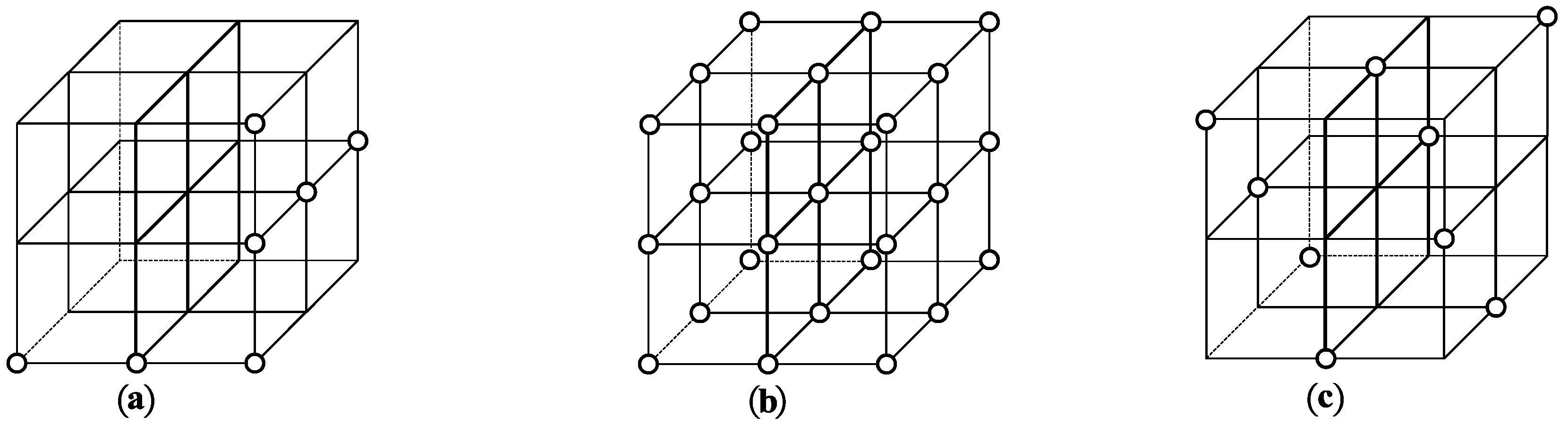
Figure 3.
Distribution of experimental points with different design methods. (a) One-factor-at-a-time experiment. (b) Comprehensive experiment. (c) Orthogonal experiment.
Figure 3.
Distribution of experimental points with different design methods. (a) One-factor-at-a-time experiment. (b) Comprehensive experiment. (c) Orthogonal experiment.
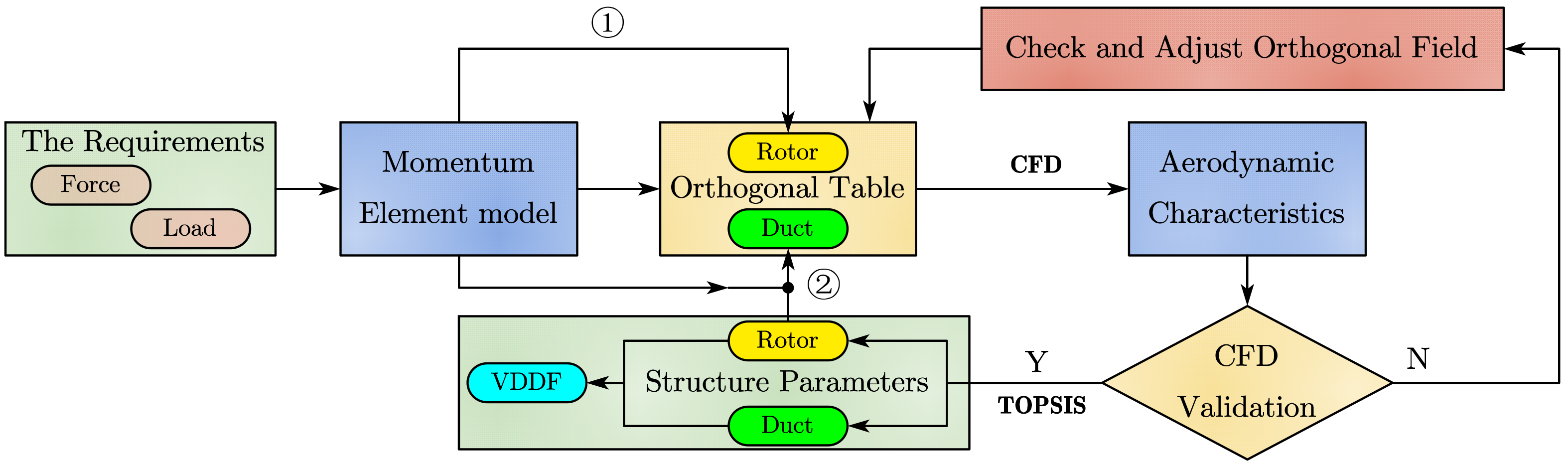
Figure 4.
Orthogonal experiment flow.
Figure 4.
Orthogonal experiment flow.
Figure 5.
Lift drag coefficient of NACA23012 airfoil.
Figure 5.
Lift drag coefficient of NACA23012 airfoil.
Figure 6.
Schematic diagram of aircraft pitching. (a) Negative pitch. (b) Horizontal. (c) Positive pitch.
Figure 6.
Schematic diagram of aircraft pitching. (a) Negative pitch. (b) Horizontal. (c) Positive pitch.
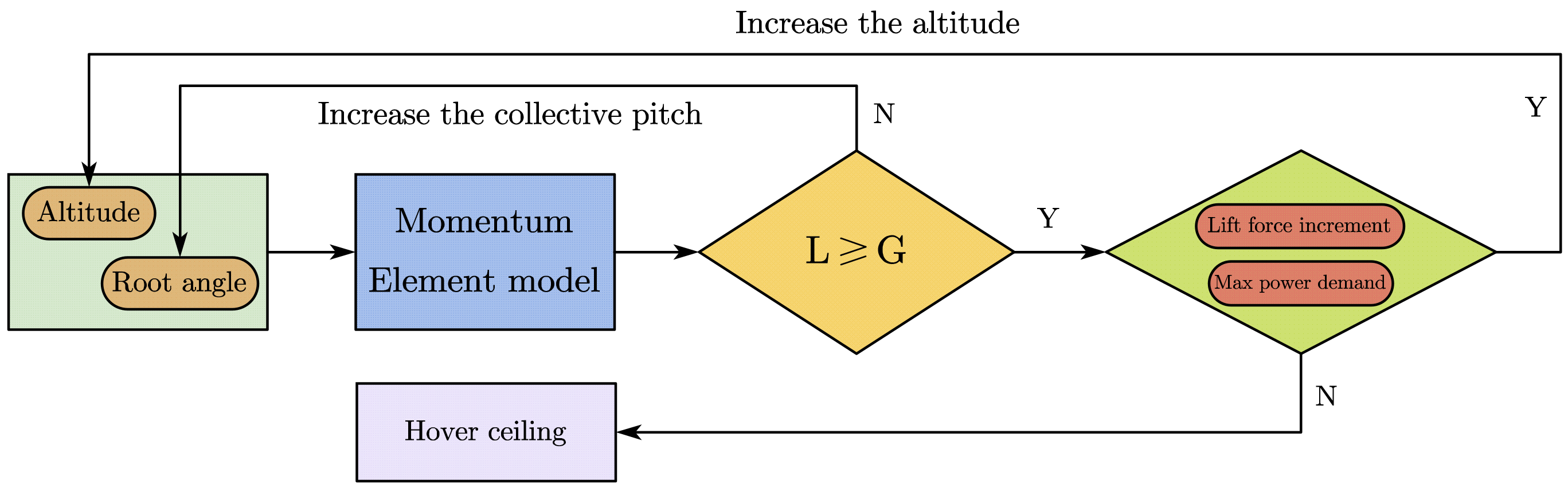
Figure 7.
Hover ceiling calculation flow.
Figure 7.
Hover ceiling calculation flow.
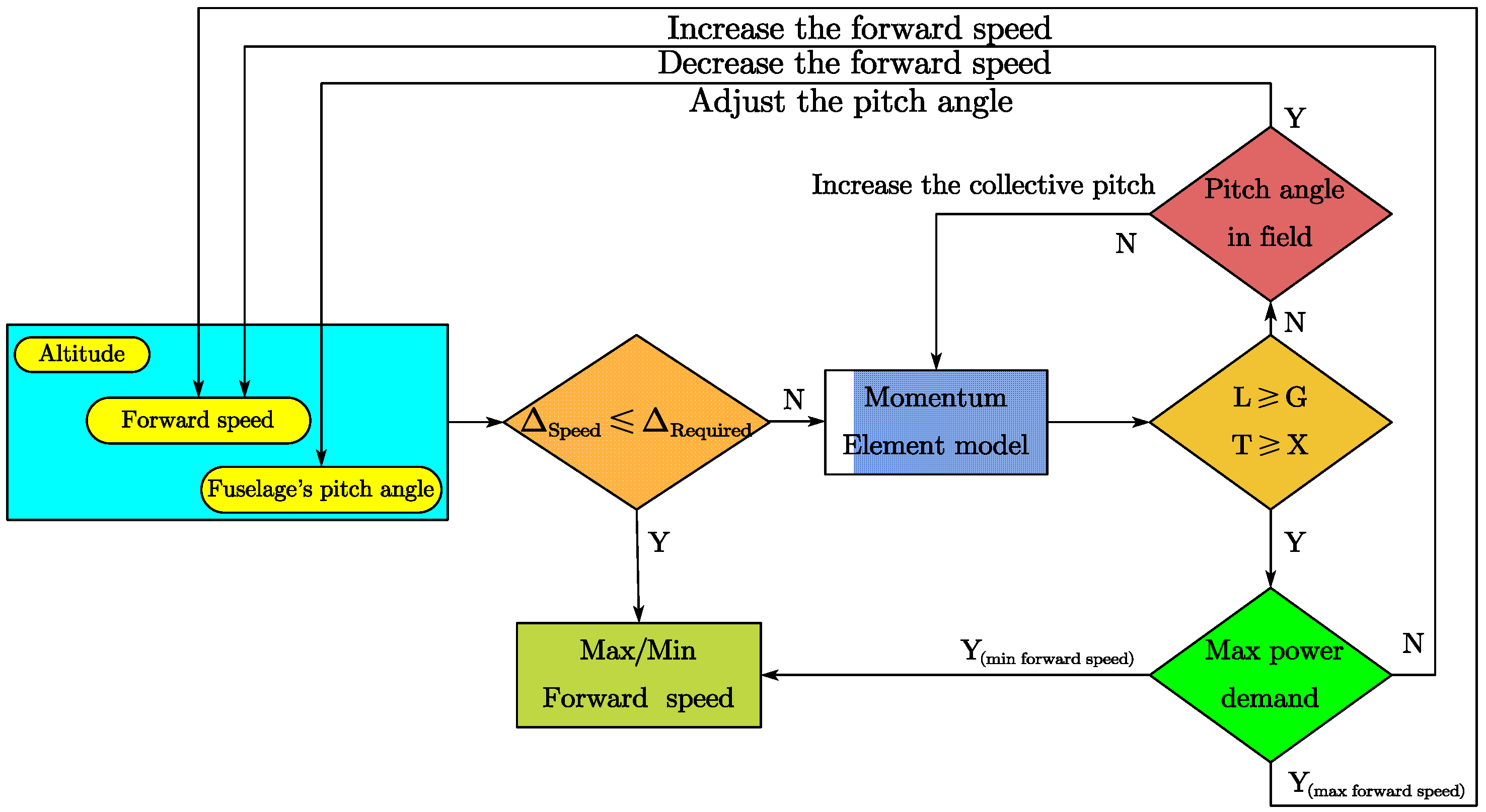
Figure 8.
Flight envelope calculation flow.
Figure 8.
Flight envelope calculation flow.
Figure 9.
Z-9 helicopter prototype.
Figure 9.
Z-9 helicopter prototype.
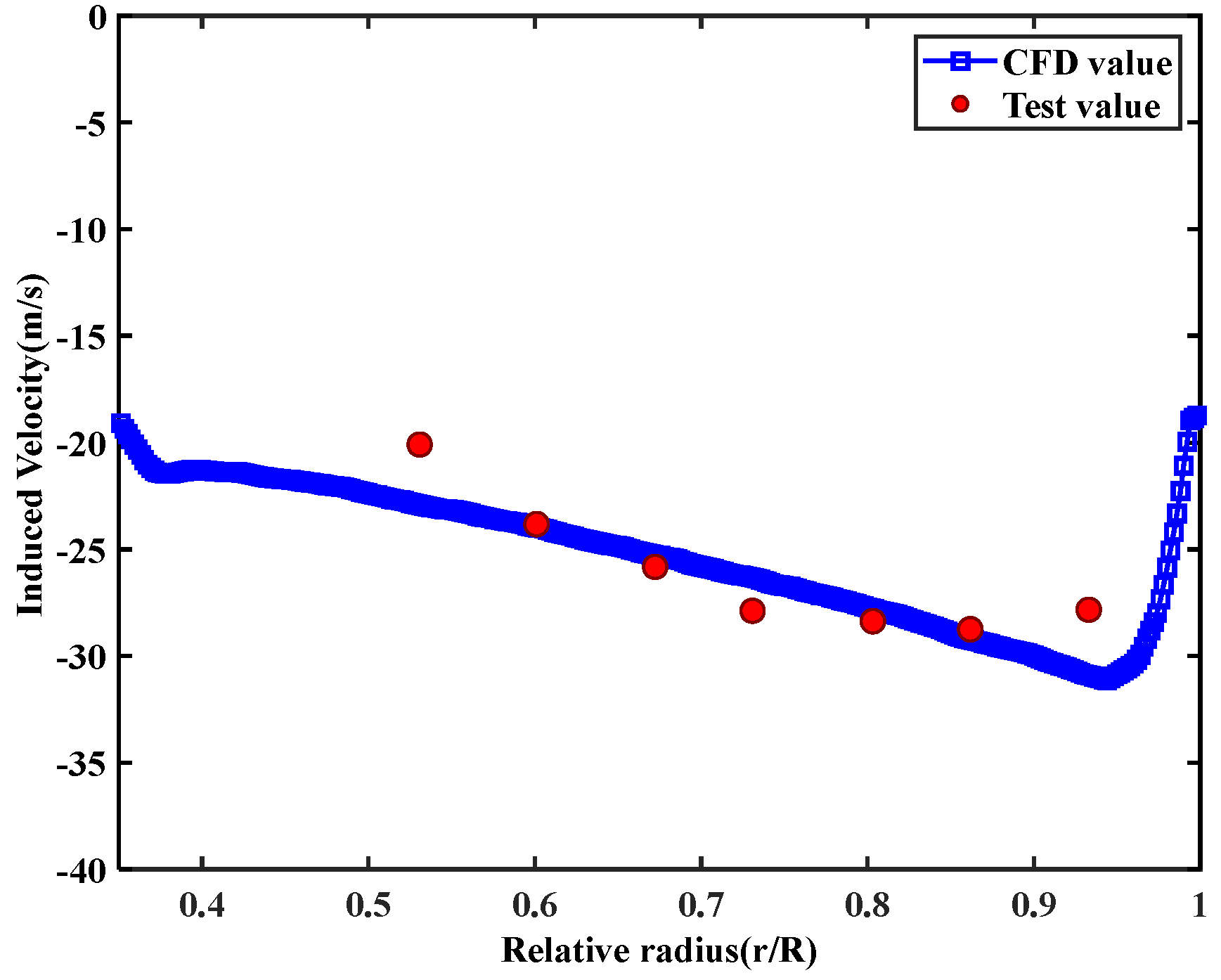
Figure 10.
The induced velocity at the rotor disk.
Figure 10.
The induced velocity at the rotor disk.
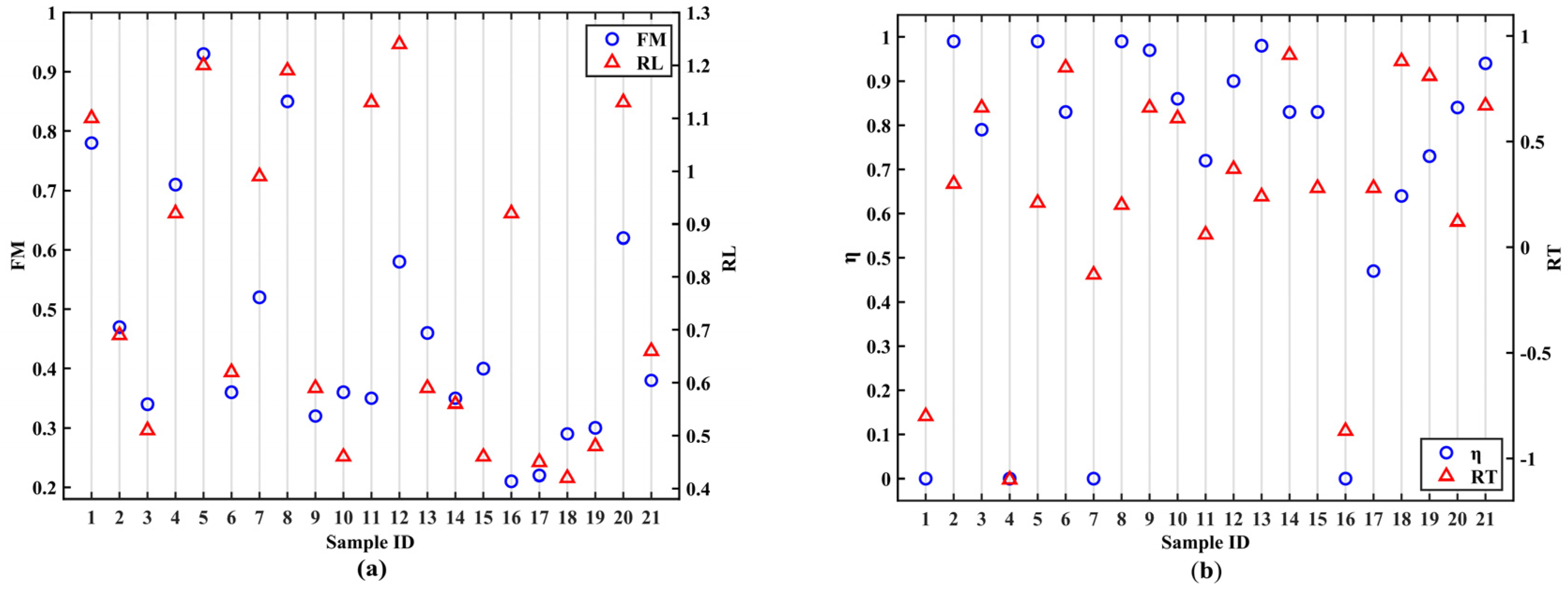
Figure 11.
Aerodynamic characteristics of rotor samples. (a) Hover flight. (b) Forward flight.
Figure 11.
Aerodynamic characteristics of rotor samples. (a) Hover flight. (b) Forward flight.
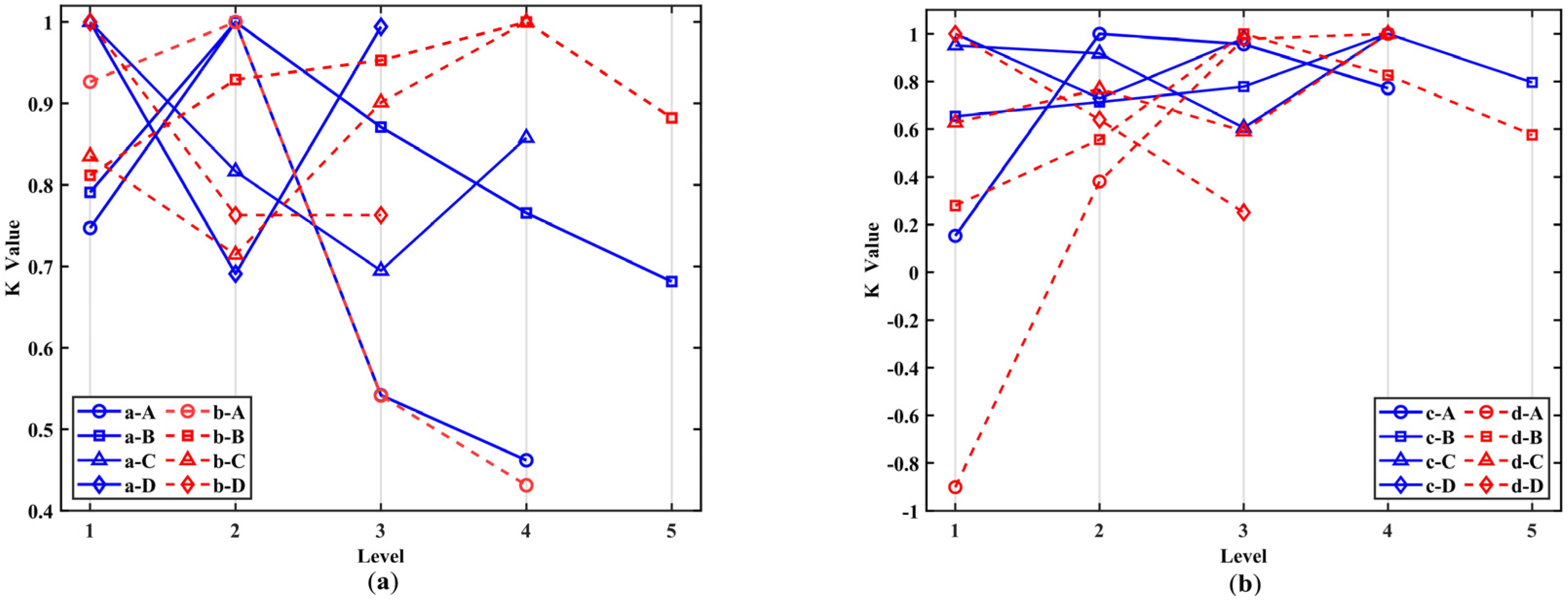
Figure 12.
The rotor’s normalized K value curve. (a) Hover flight. (b) Forward flight.
Figure 12.
The rotor’s normalized K value curve. (a) Hover flight. (b) Forward flight.
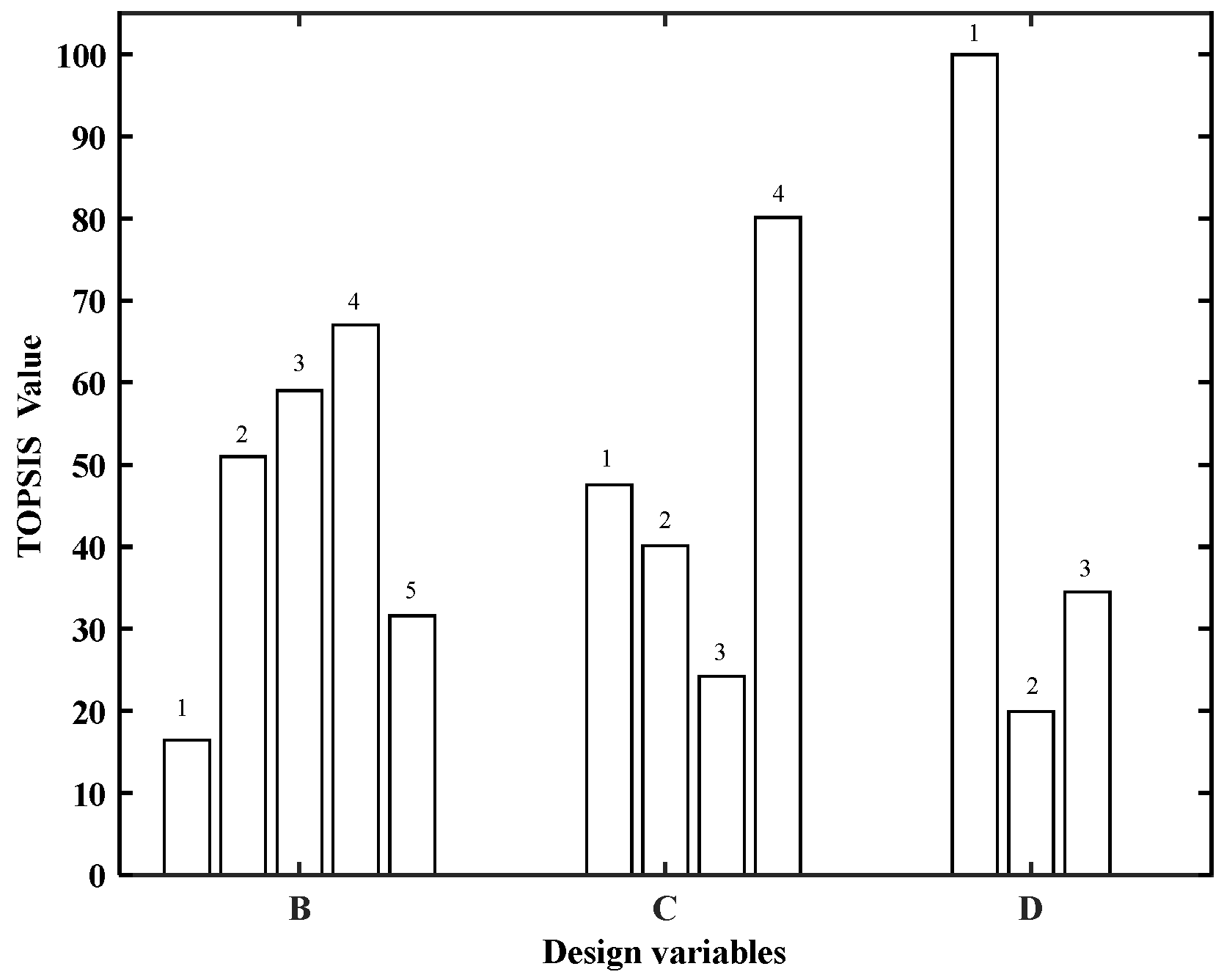
Figure 13.
TOPSIS evaluation of rotor disk.
Figure 13.
TOPSIS evaluation of rotor disk.
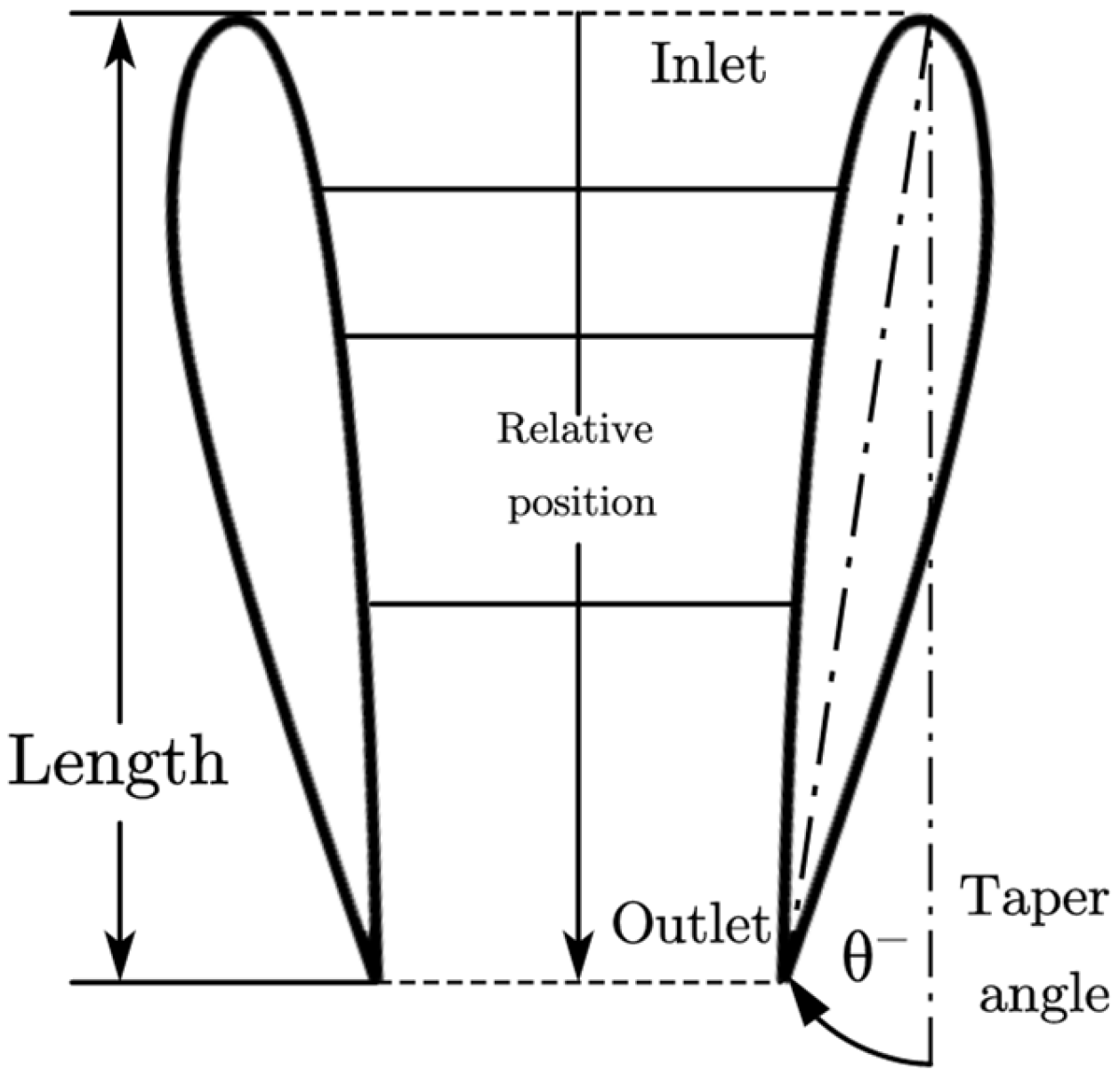
Figure 14.
Duct’s structure scheme.
Figure 14.
Duct’s structure scheme.
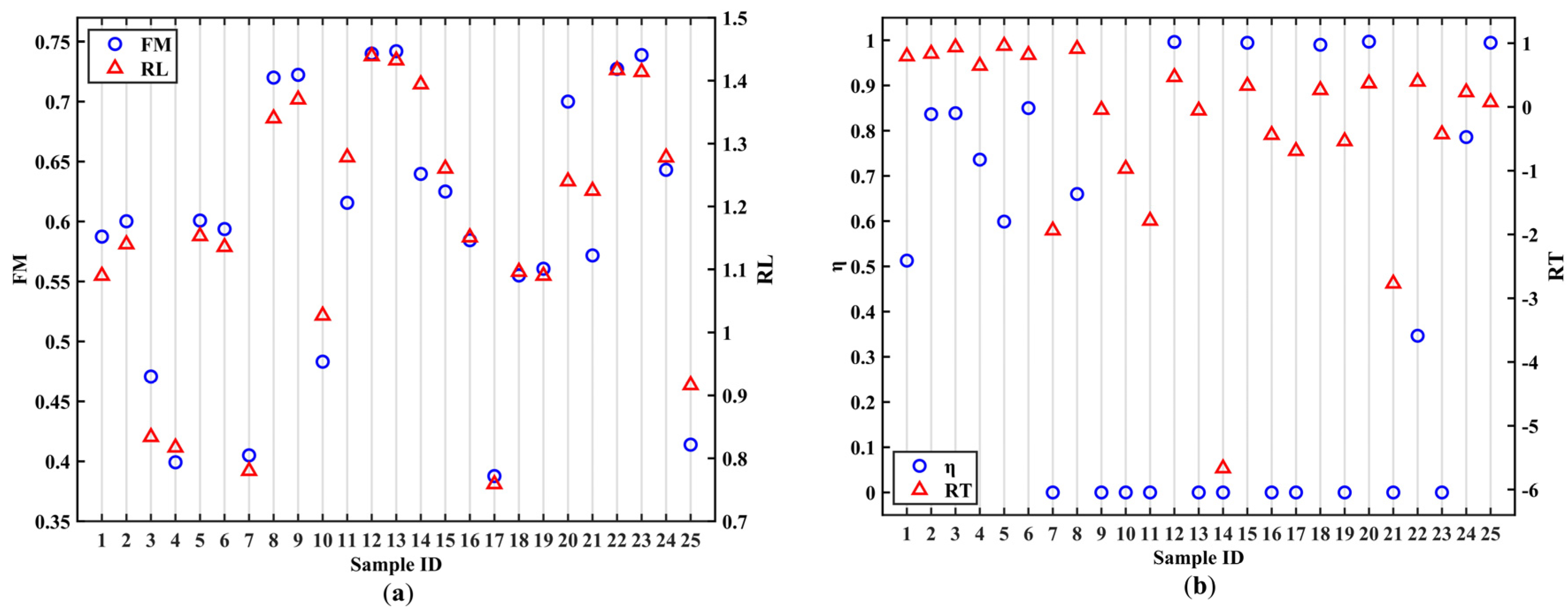
Figure 15.
Aerodynamic characteristics of duct samples. (a) Hover flight. (b) Forward flight.
Figure 15.
Aerodynamic characteristics of duct samples. (a) Hover flight. (b) Forward flight.
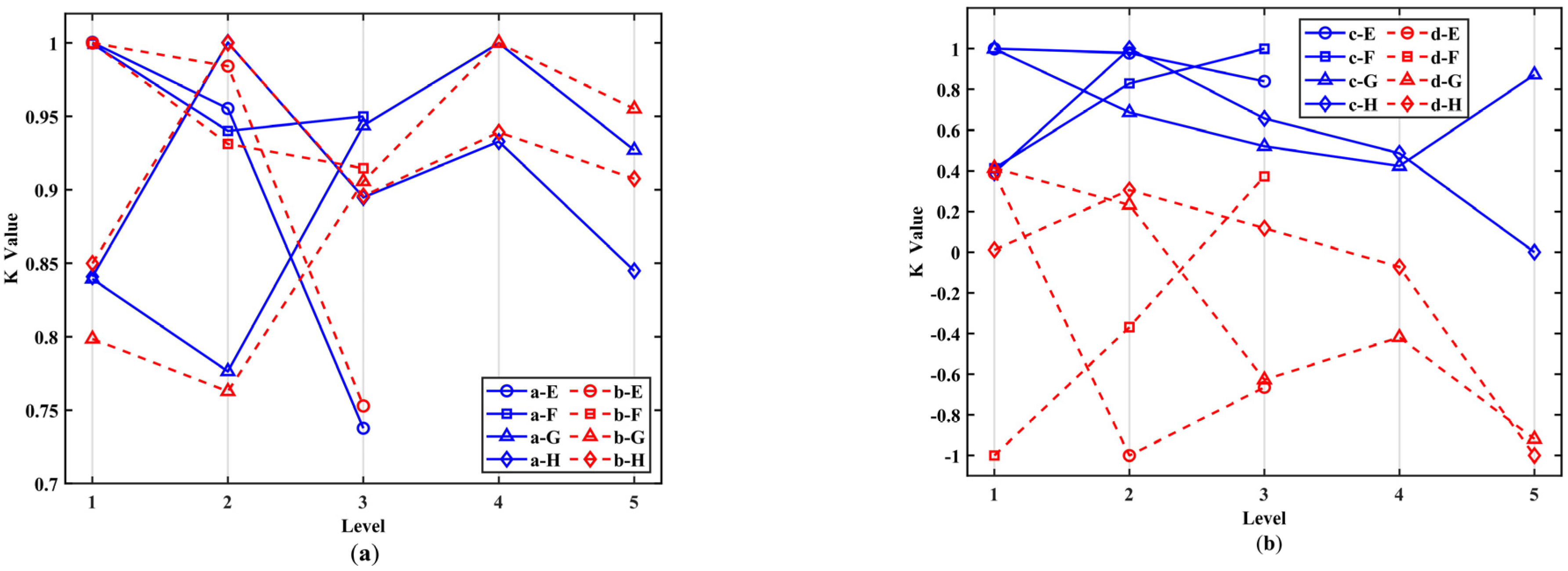
Figure 16.
The duct’s normalized K value curve. (a) Hover flight. (b) Forward flight.
Figure 16.
The duct’s normalized K value curve. (a) Hover flight. (b) Forward flight.
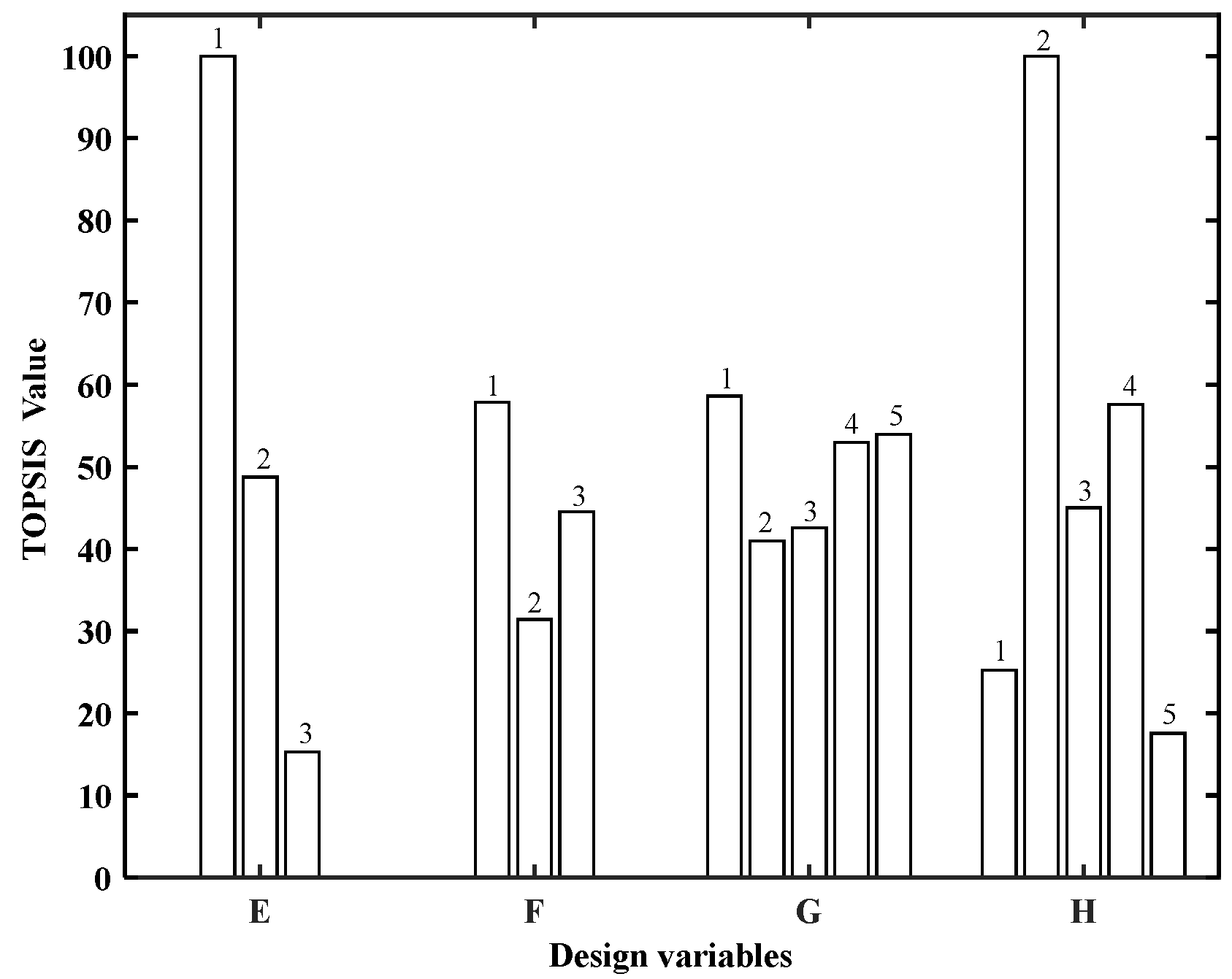
Figure 17.
TOPSIS evaluation of duct.
Figure 17.
TOPSIS evaluation of duct.
Figure 18.
VDDF lift force calculation in hovering.
Figure 18.
VDDF lift force calculation in hovering.
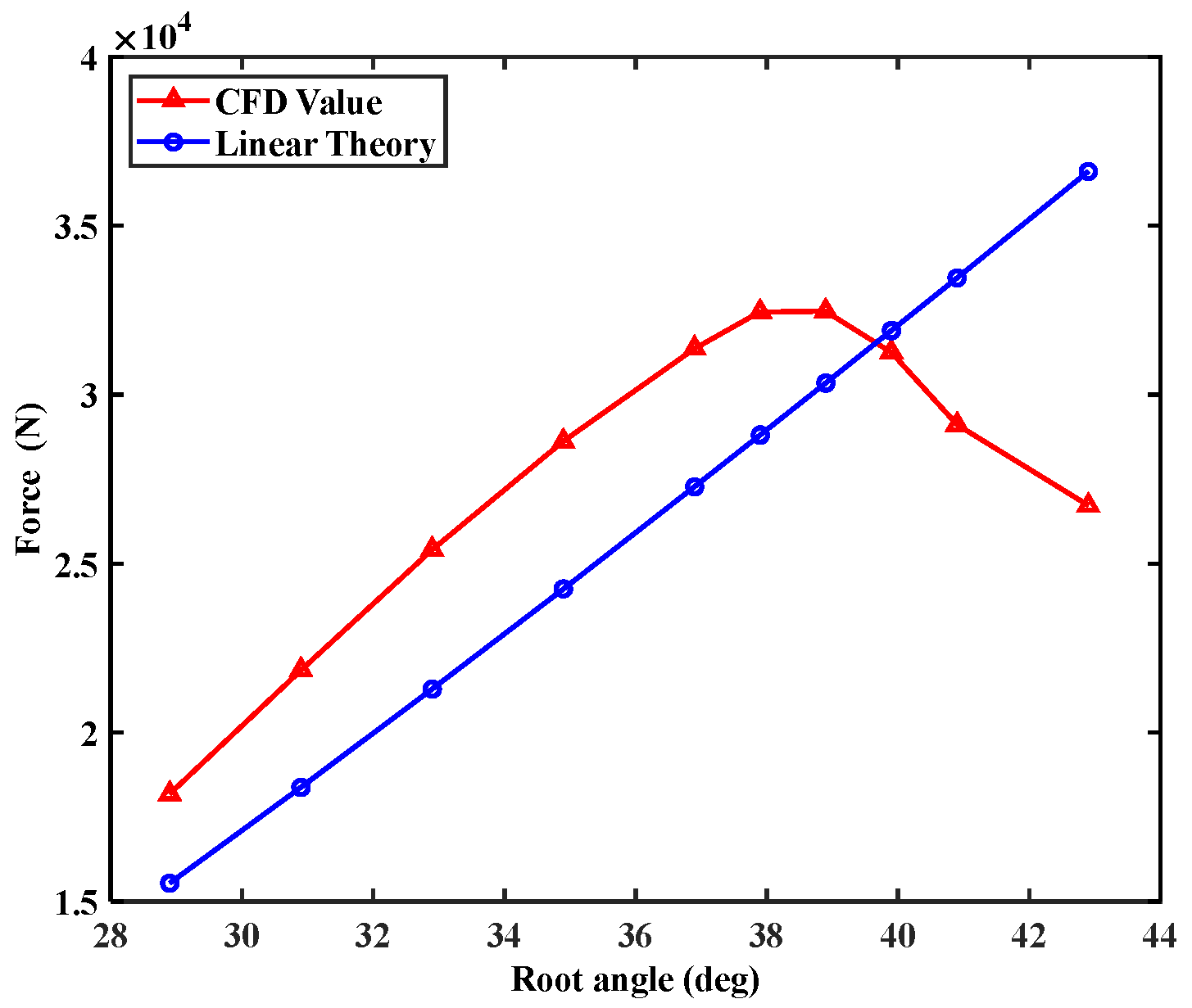
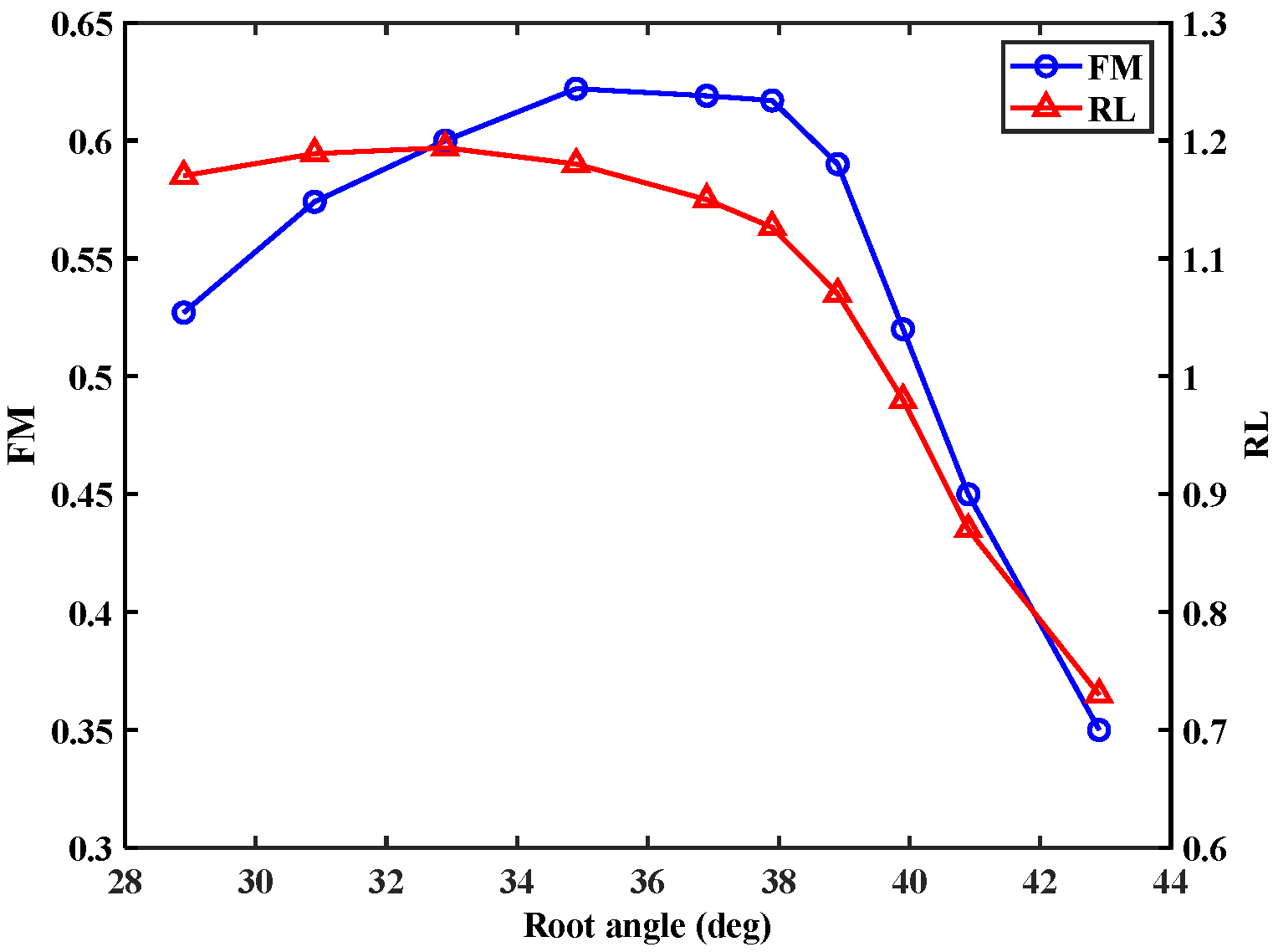
Figure 19.
Hovering aerodynamic characteristics under different rotor root angles.
Figure 19.
Hovering aerodynamic characteristics under different rotor root angles.
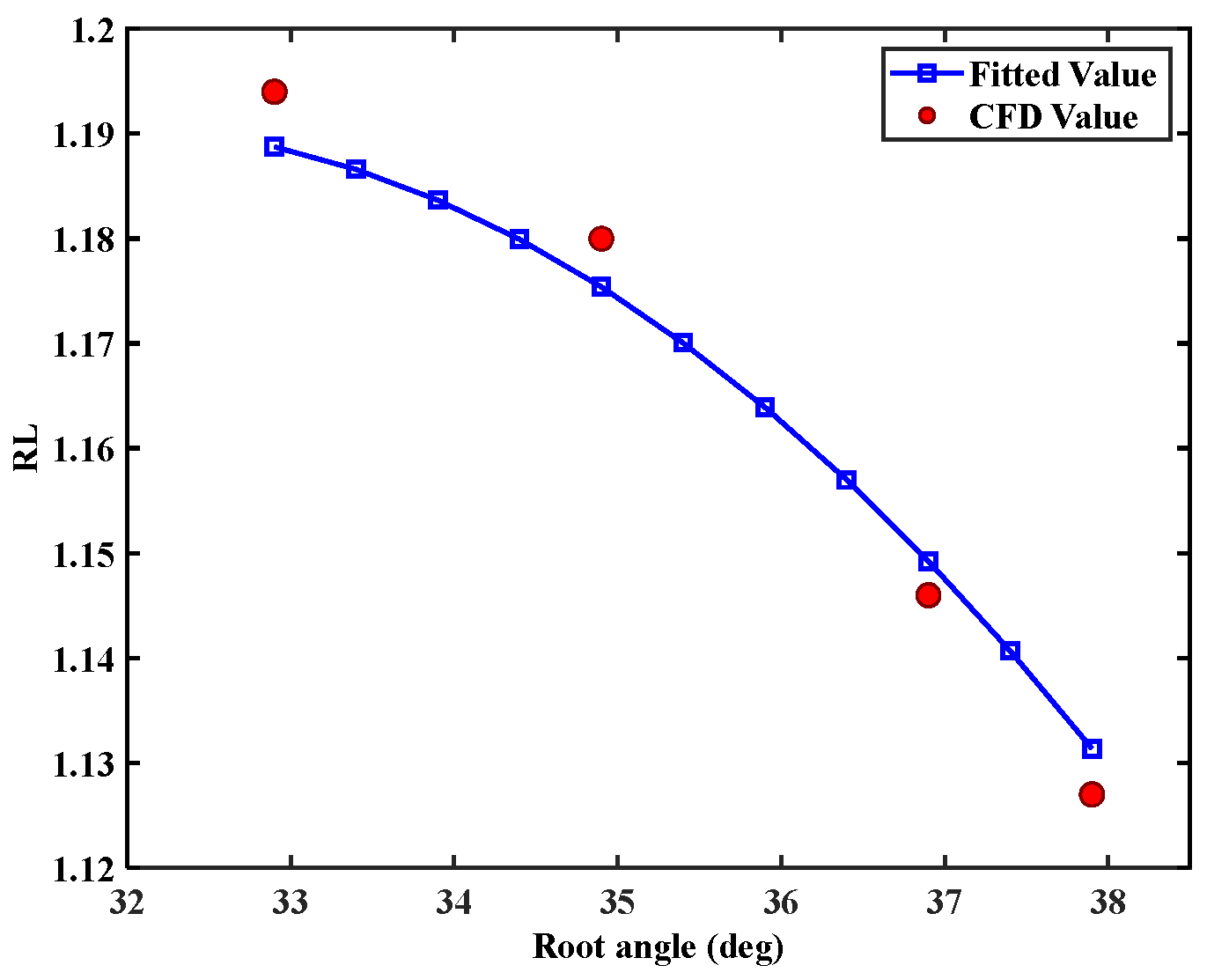
Figure 20.
RL fitted curve.
Figure 20.
RL fitted curve.
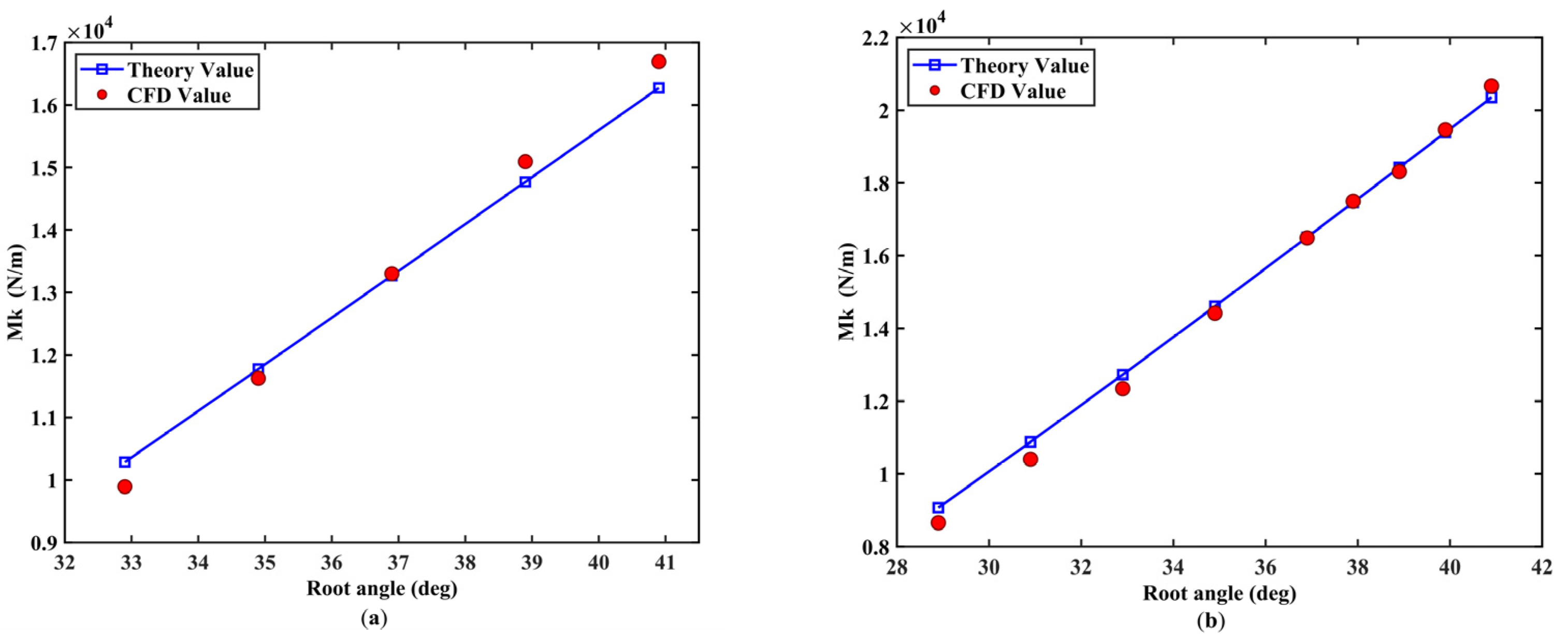
Figure 21.
Hovering Mk calculation at sea level. (a) 58 rad/s database. (b) 65 rad/s database.
Figure 21.
Hovering Mk calculation at sea level. (a) 58 rad/s database. (b) 65 rad/s database.
Figure 22.
Download pressure nephogram of wing surface.
Figure 22.
Download pressure nephogram of wing surface.
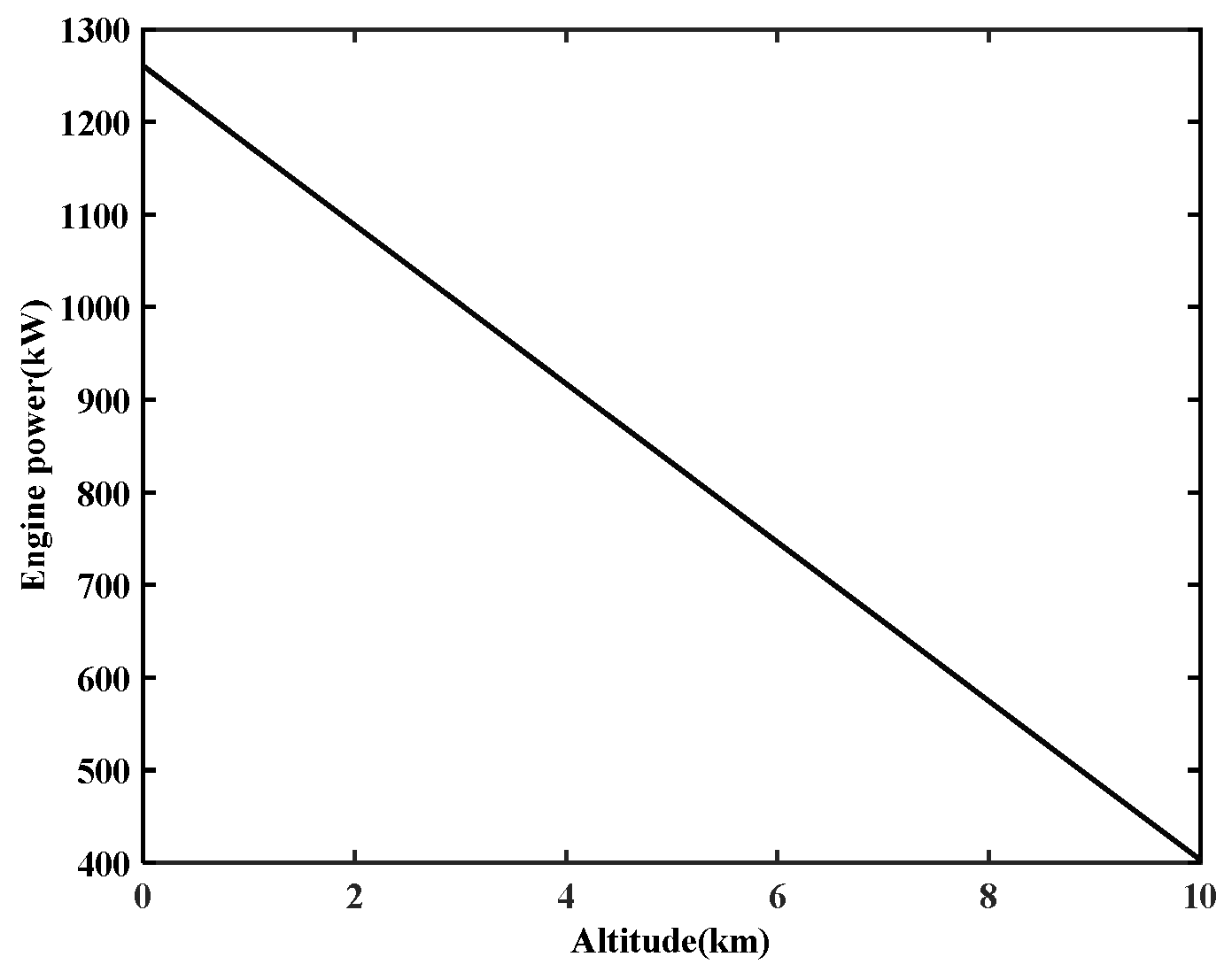
Figure 23.
Altitude characteristics of a typical turboshaft engine.
Figure 23.
Altitude characteristics of a typical turboshaft engine.
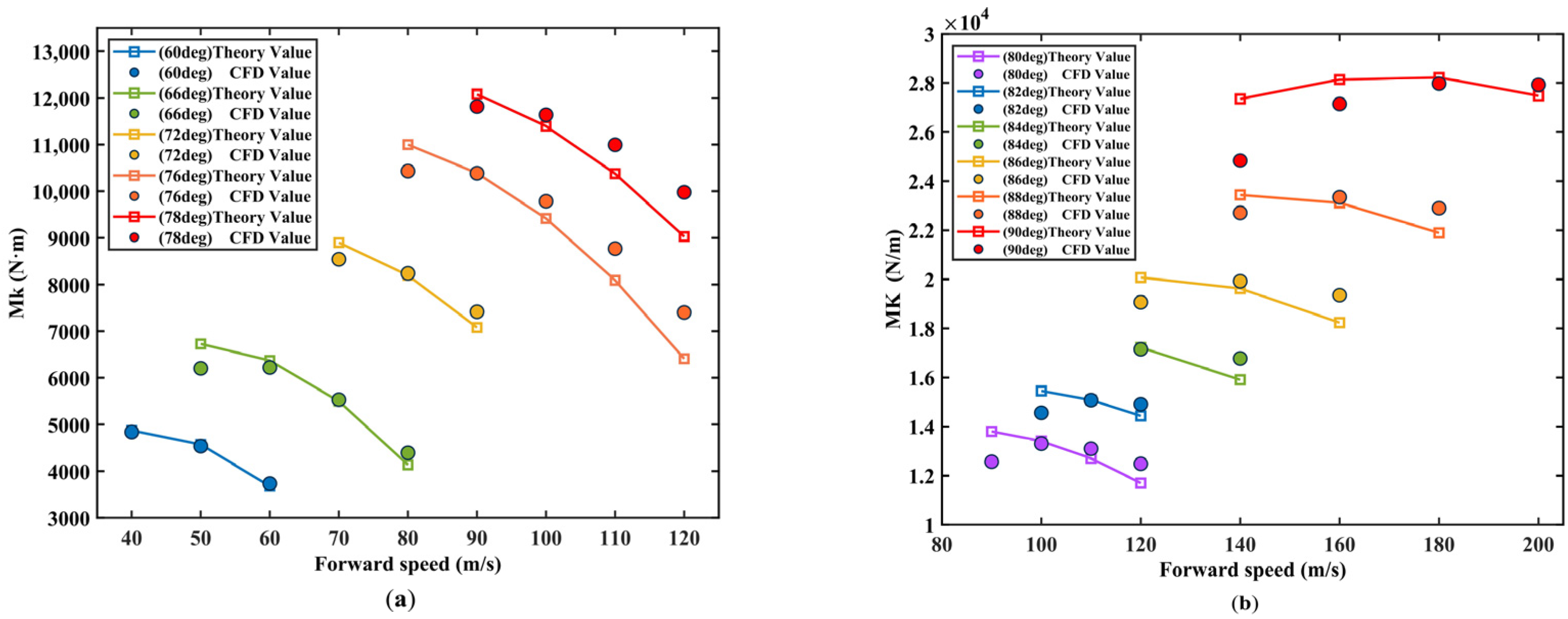
Figure 24.
Forwarding Mk calculation at 5 km in 56 rad/s. (a) 60°~78° database. (b) 80°~90° database.
Figure 24.
Forwarding Mk calculation at 5 km in 56 rad/s. (a) 60°~78° database. (b) 80°~90° database.
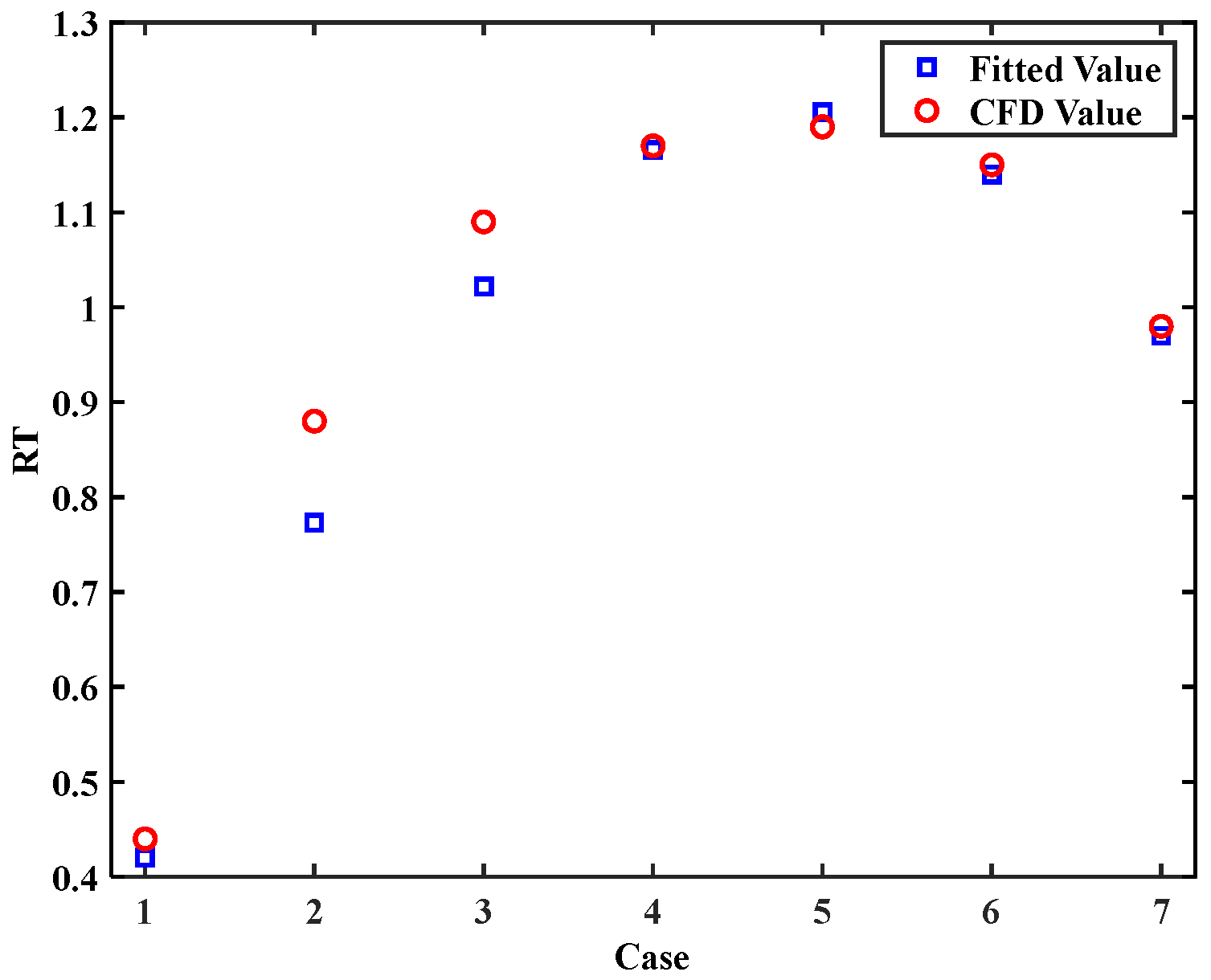
Figure 25.
RT fitted cases in 120 m/s database.
Figure 25.
RT fitted cases in 120 m/s database.
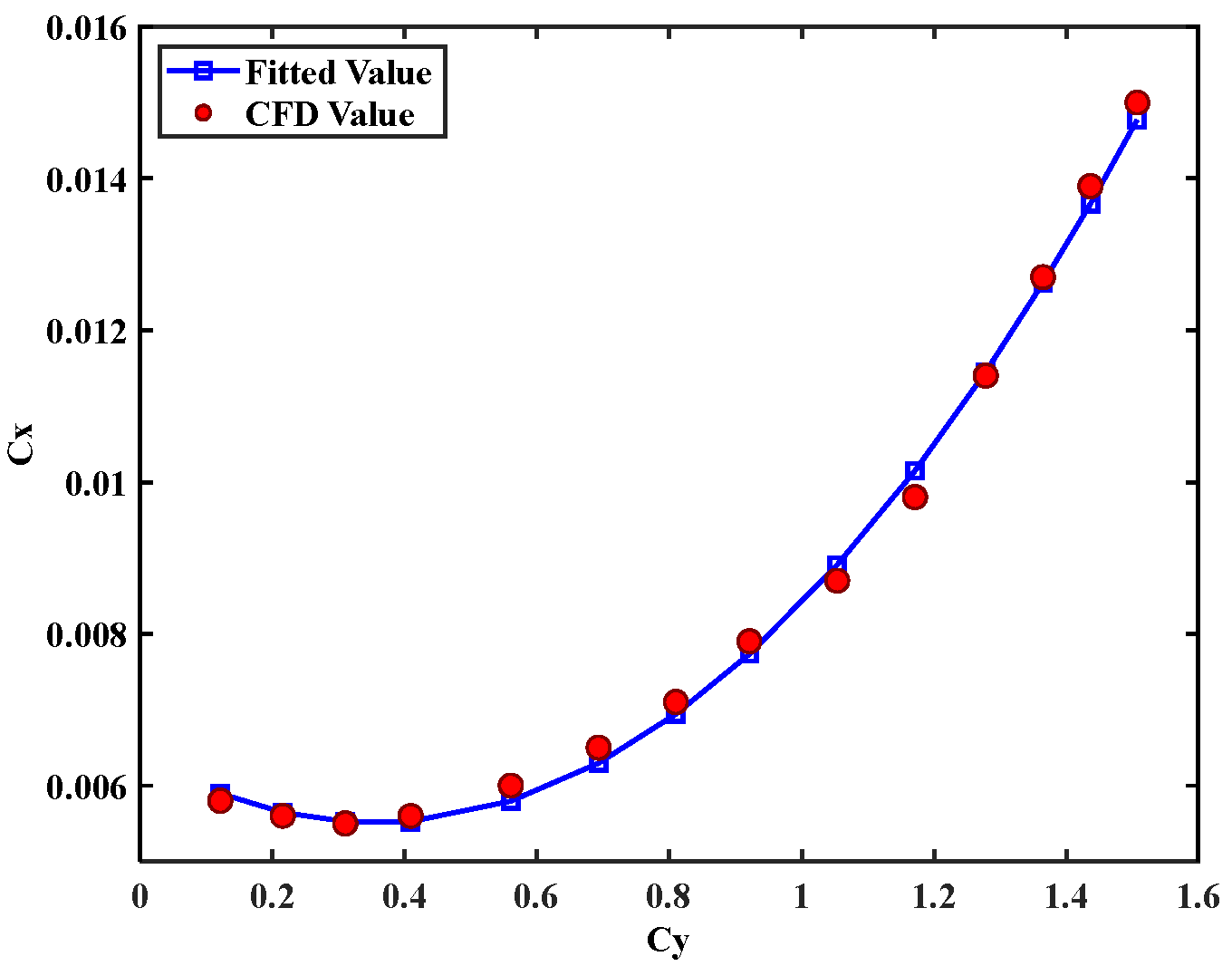
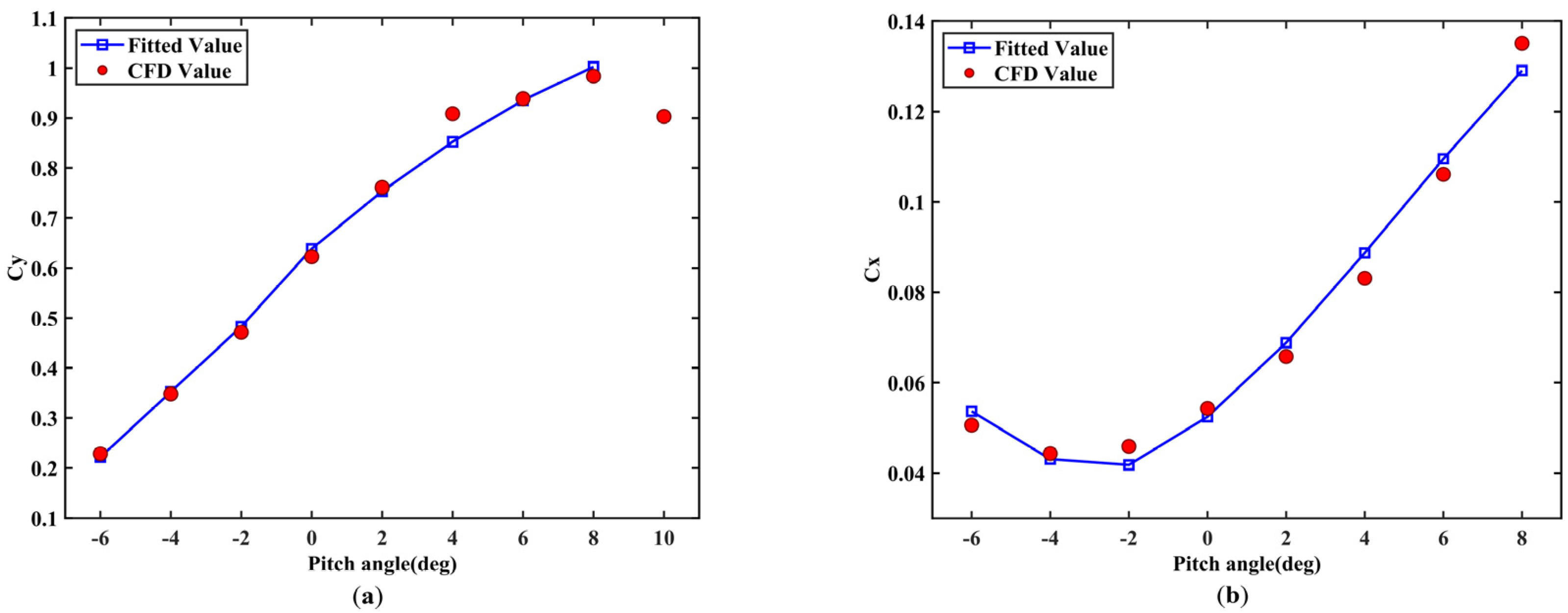
Figure 26.
The Cy and Cx of aircraft in different pitch angles. (a) Cy fitted curve. (b) Cx fitted curve.
Figure 26.
The Cy and Cx of aircraft in different pitch angles. (a) Cy fitted curve. (b) Cx fitted curve.
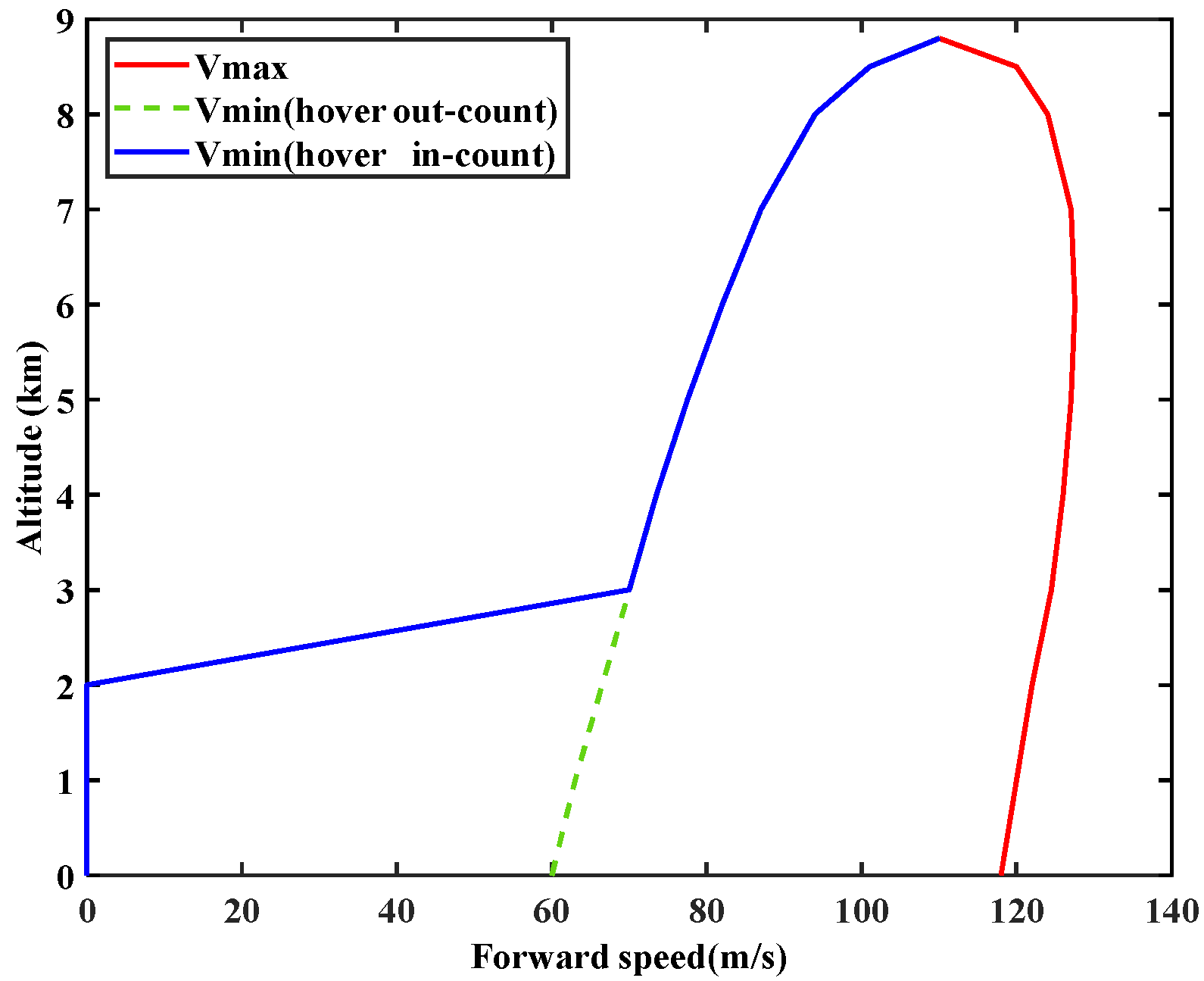
Figure 27.
The flight envelope of the retrofit.
Figure 27.
The flight envelope of the retrofit.
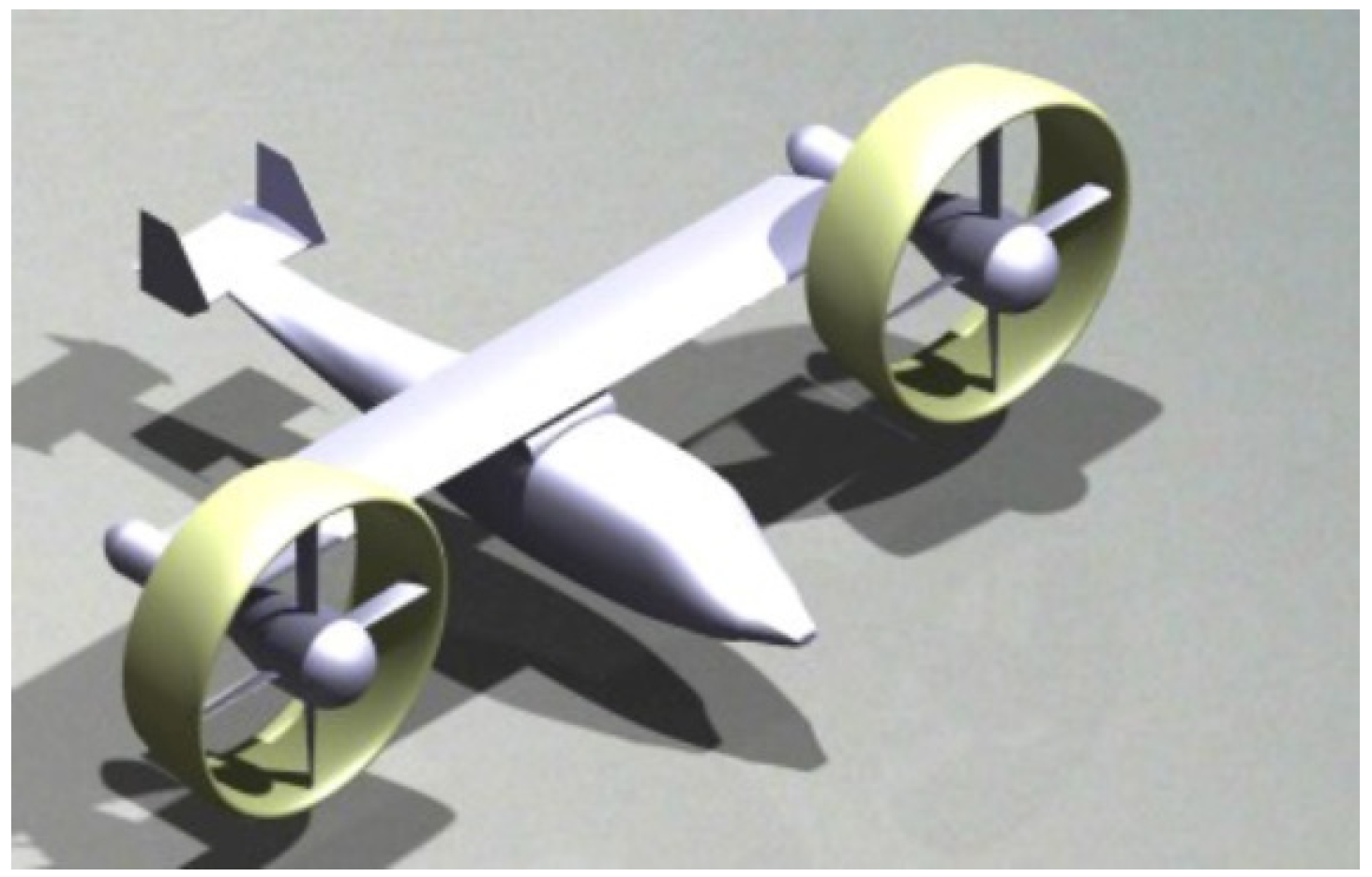
Figure 28.
The retrofit equipped with VDDF.
Figure 28.
The retrofit equipped with VDDF.
Table 1.
A typical orthogonal table.
Table 1.
A typical orthogonal table.
| Sample ID | Design Variables | Aerodynamic Characteristics |
|---|
| A | B | … | T | a | b | … | x |
|---|
| 1 | A1 | B1 | … | T1 | a11 | a12 | … | a1x |
| 2 | A2 | B1 | … | T1 | a21 | a22 | … | a2x |
| | | | | | | | |
| n | Am | Bm | … | T1 | an1 | an1 | … | anx |
Table 2.
Flight performance of prototype and design goal.
Table 2.
Flight performance of prototype and design goal.
| Performance | Prototype | Design Goal |
|---|
| Max Takeoff Weight | 4000 kg | 5000 kg |
| Hover ceiling(OGE) | 1050 m | 2000 m |
| Cruise altitude | ≤4500 m | ≥5000 m |
| Cruise speed | 293 km/h | ≥360 km/h |
| FM | - | 0.6 |
| - | 0.7 |
Table 3.
Validation of the CFD and momentum-element model.
Table 3.
Validation of the CFD and momentum-element model.
| Rotor Force | Error |
|---|
| CFD | Comparison Value |
|---|
| 79.6 N | 88.2 N [Test] | 0.09 |
| 128 N | 143 N [Theory model] | 0.1 |
Table 4.
Invariable geometric parameters of the rotor in the orthogonal experiment.
Table 4.
Invariable geometric parameters of the rotor in the orthogonal experiment.
| Geometry | Parameter |
|---|
| Blade airfoil | NACA23012 |
| Rotor radius R | 3 m (hover flight) | 2 m (forward flight) |
| Root-cut radius Rg | 0.6 m |
| Disk-Duct clearance | 0.01 R |
| Duct airfoil | NACA0018 |
| Rotor-Duct relative position | 0.3 |
| Duct length | 3 m |
| Duct taper angle | 0° |
Table 5.
Orthogonal parameters field of the rotor disk.
Table 5.
Orthogonal parameters field of the rotor disk.
| Root Angle | Twist | Length | Num | Level |
|---|
| Hover Flight | Forward Flight |
|---|
| 26° | 56° | 7° | 0.75 m | 4 | 1 |
| 36° | 66° | 12° | 0.5 m | 6 | 2 |
| 46° | 76° | 17° | 0.375 m | 8 | 3 |
| 56° | 86° | 22° | 0.3 m | - | 4 |
| - | - | 27° | - | - | 5 |
Table 6.
Validation of rotor’s optimal sample combinations.
Table 6.
Validation of rotor’s optimal sample combinations.
| Aerodynamic Characteristics | Combination | Result | Optimal or Not |
|---|
| a | A2B2C1D1 | 0.94 | Y |
| b | A2B4C4D1 | 1.3 | Y |
| c | A2B4C4D1 | 0.92 | N |
| d | A4B3C4D1 | 1.01 | Y |
Table 7.
Structural parameters of the rotor disk.
Table 7.
Structural parameters of the rotor disk.
| Structure | Parameters |
|---|
| Twist | 22° |
| Chord length | 0.3 m |
| Blades’ number | 4 |
Table 8.
Orthogonal parameters field of the duct.
Table 8.
Orthogonal parameters field of the duct.
| Airfoil | Relative Position | Length | Taper Angle | Level |
|---|
| NACA0018 | 0.15 | 1.5 m | −8° | 1 |
| NACA4318 | 0.3 | 2 m | −4° | 2 |
| NACA4309 | 0.65 | 2.5 m | 0° | 3 |
| - | - | 3 m | 4° | 4 |
| - | - | 3.5 m | 8° | 5 |
Table 9.
Validation of duct’s optimal sample combinations.
Table 9.
Validation of duct’s optimal sample combinations.
| Aerodynamic Characteristics | Combination | Result | Optimal or Not |
|---|
| a | E1F1G4H2 | 0.75 | Y |
| b | E1F1G4H2 | 1.44 | Y |
| c | E1F3G1H2 | 0.66 | N |
| d | E1F3G1H2 | 1.09 | Y |
Table 10.
Structural parameters of the duct.
Table 10.
Structural parameters of the duct.
| Structure | Parameters |
|---|
| Airfoil | NACA0018 |
| Relative position | 0.15 |
| Length | 1.5 m |
| Taper angle | −4° |
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}