
Fault Detection and Diagnosis for Liquid Rocket Engines Based on Long Short-Term Memory and Generative Adversarial Networks

Abstract
:1. Introduction
- (1)
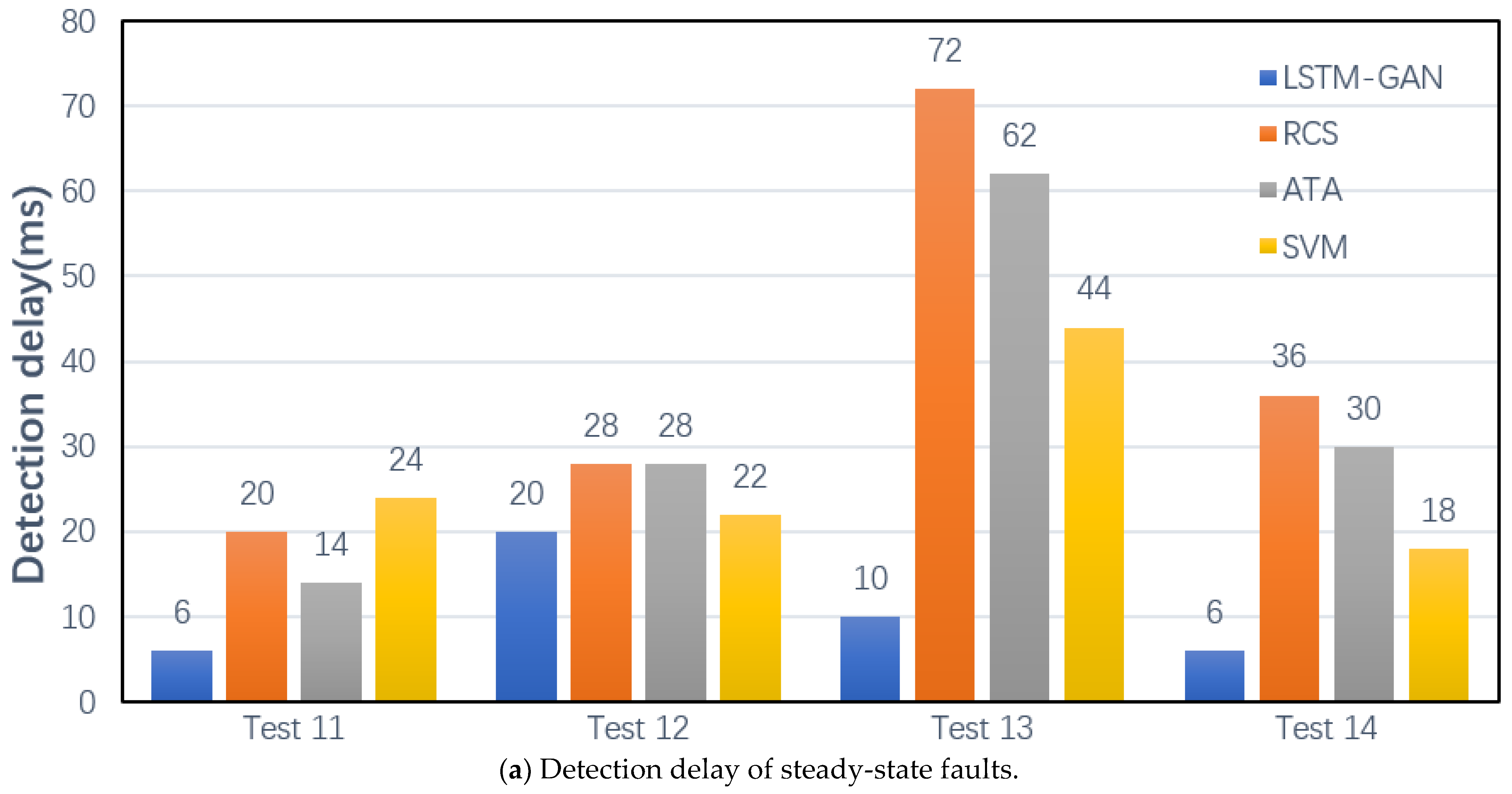
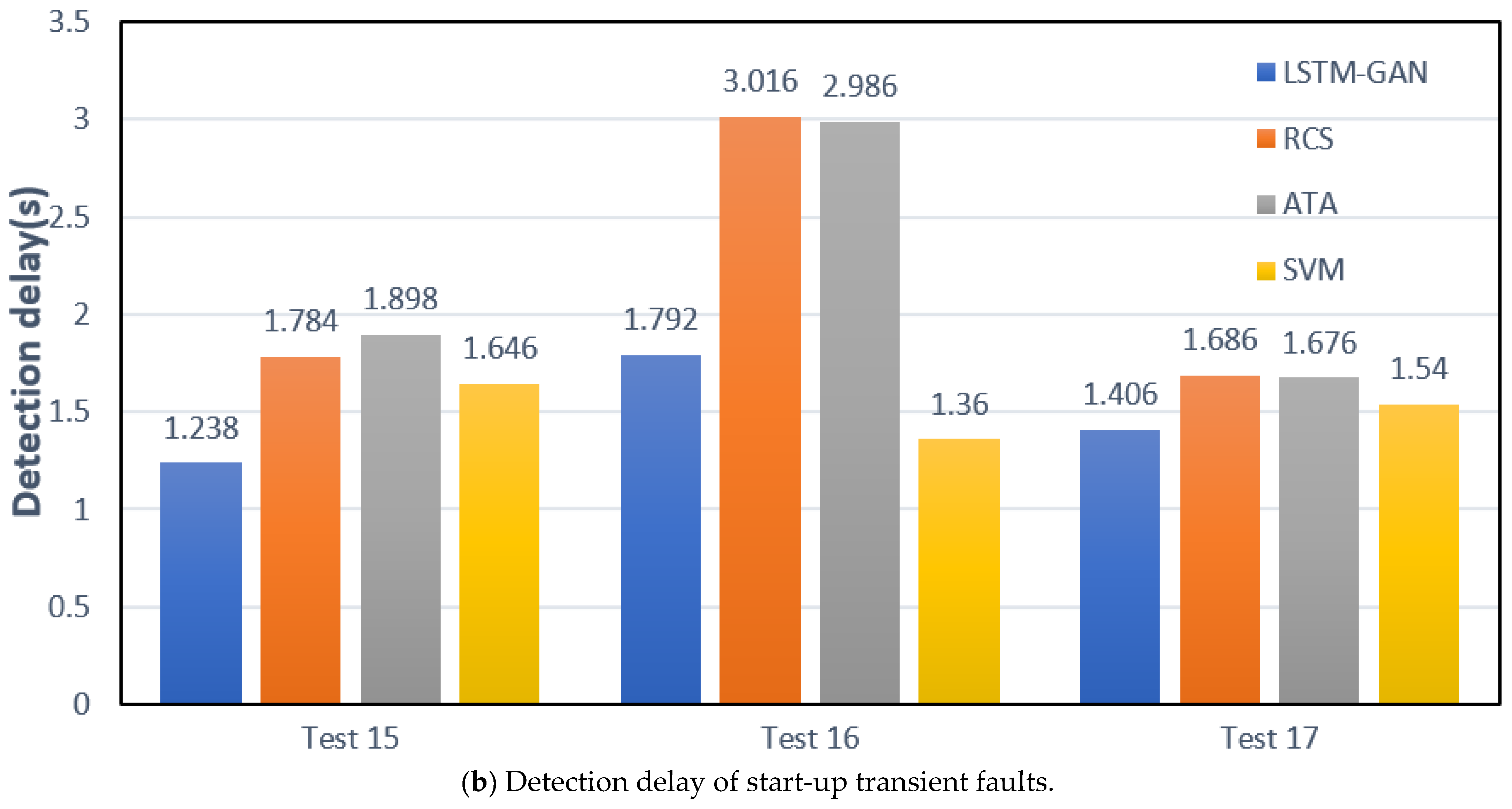
- The generator of GAN is constructed by LSTM, and the prediction function of LSTM for time series data and the classification function of GAN are used at the same time. The whole process fault detection of an LRE can be realized using only one model. Compared with RCS, ATA, and SVM methods, which need to detect data segmentation, the proposed method simplifies the fault detection process and has apparent advantages in terms of timeliness.
- (2)
- The fault diagnosis index, SAE, is constructed. The diagnosis process is simple and the result is reliable.
- (3)
- Only the normal data are used to train LSTM-GAN, so the FDD of new faults can be realized.
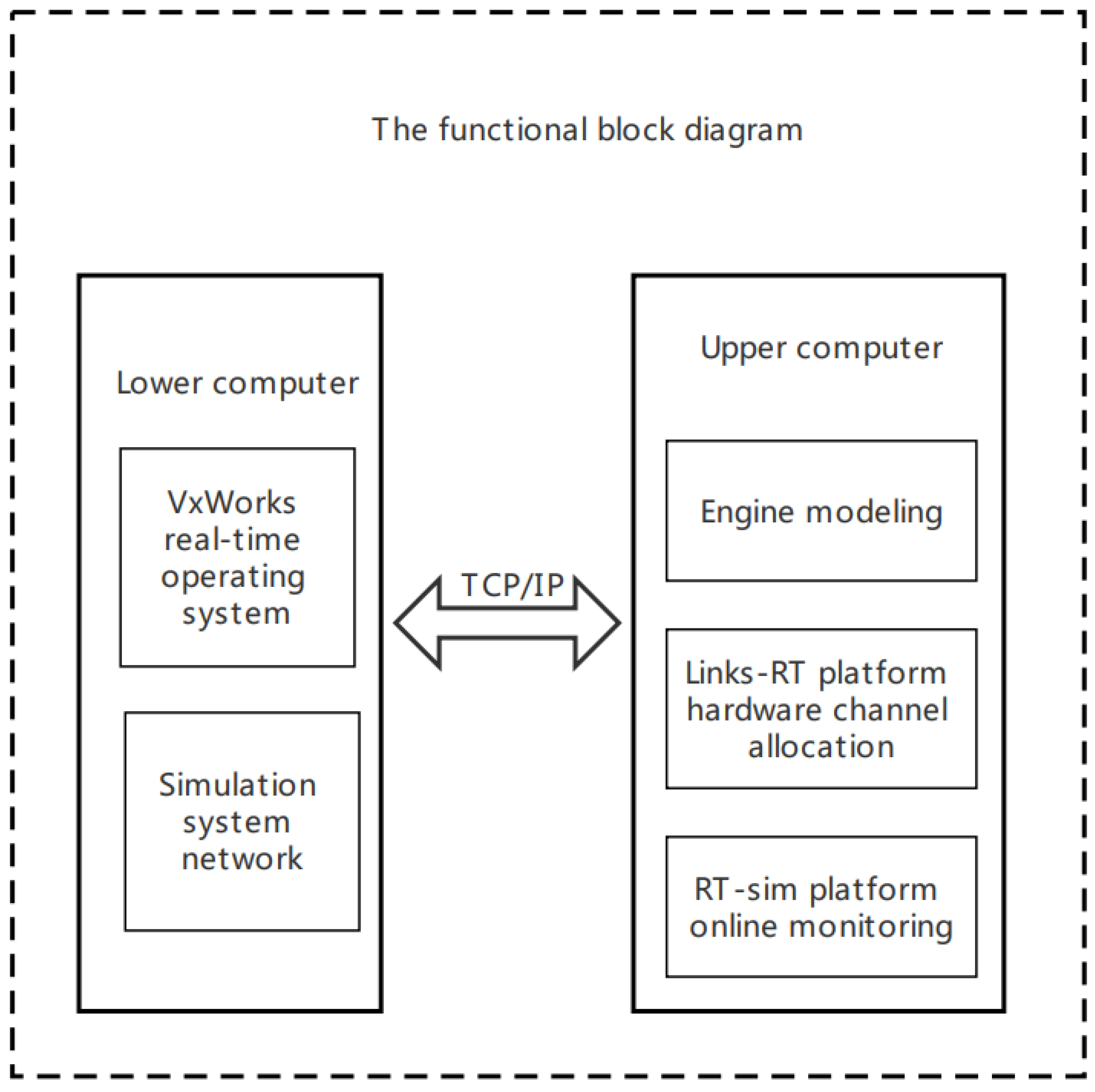
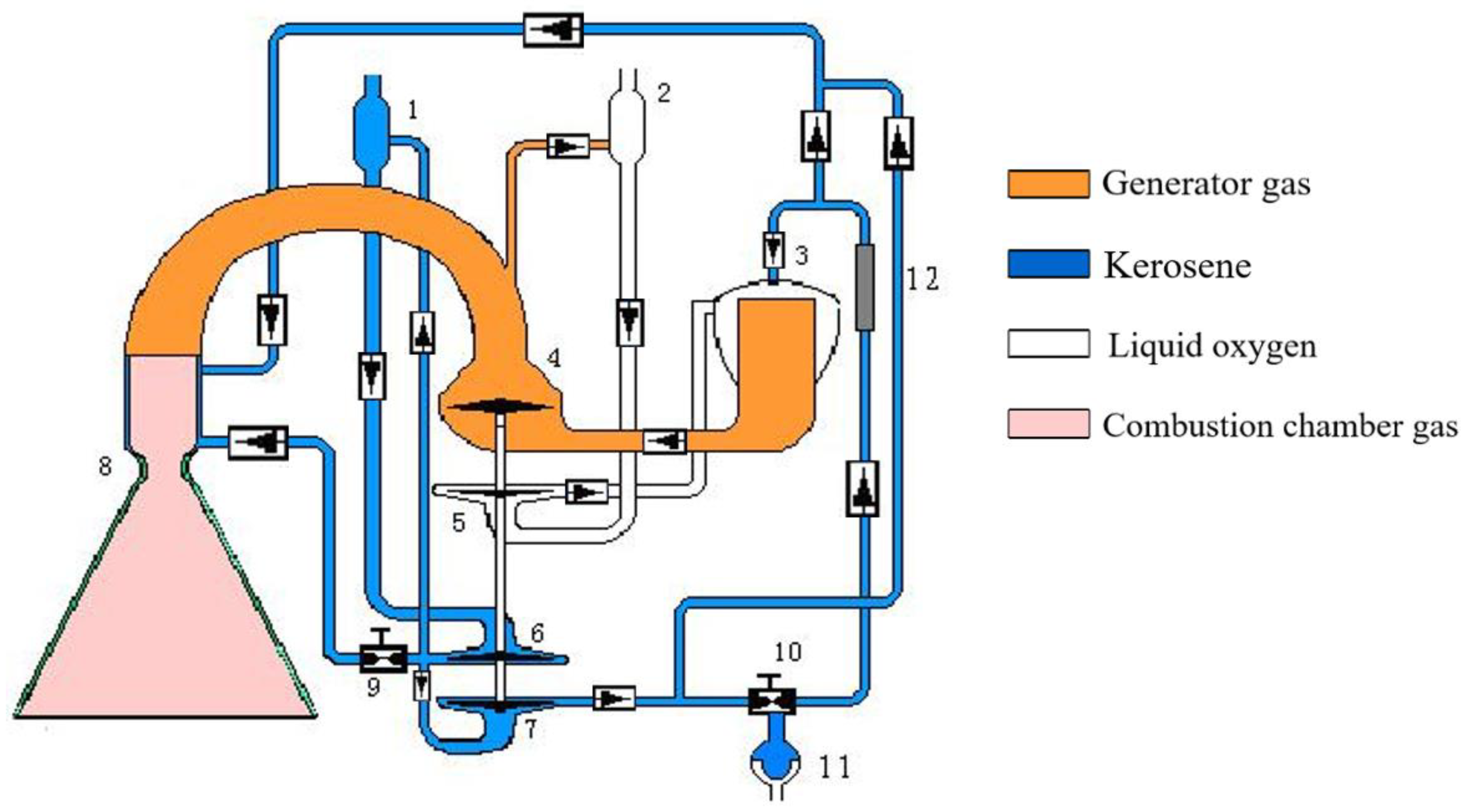
2. Simulation Process of an LRE
3. Introduction to LSTM-GAN
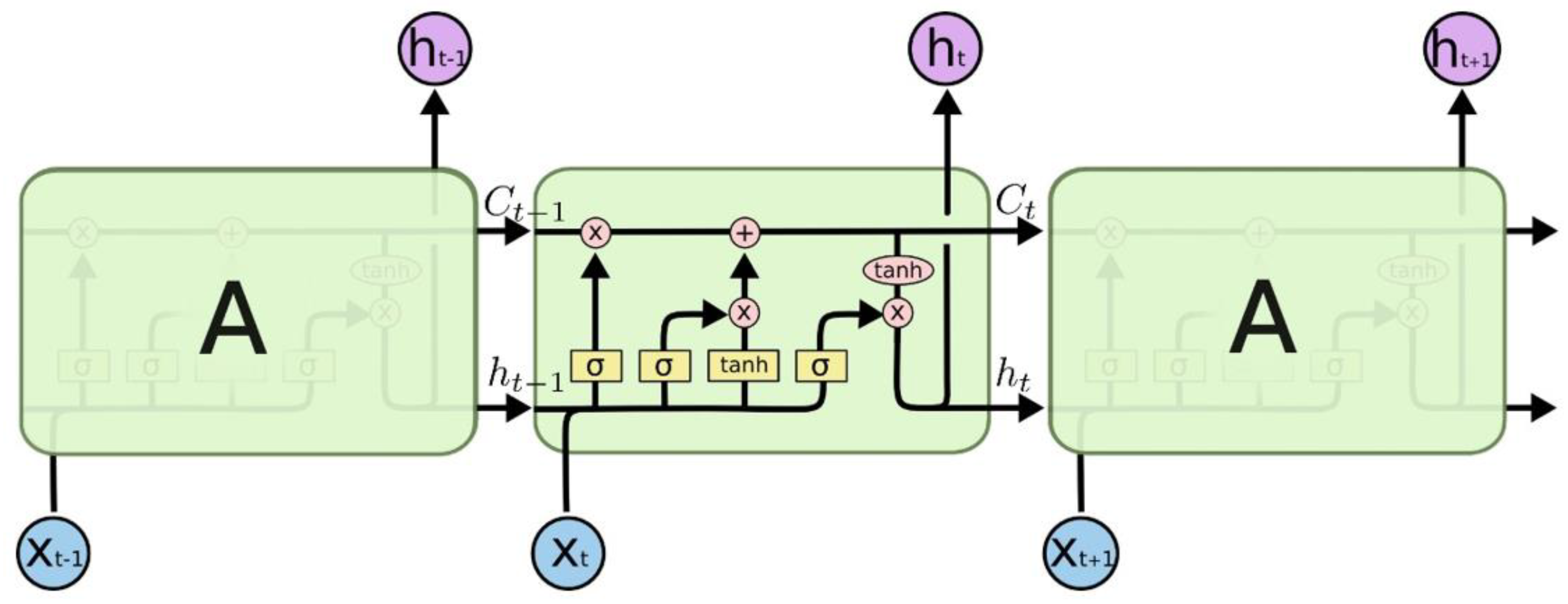
3.1. Introduction to LSTM Networks
3.1.1. The Basic Structure
3.1.2. The Input and Output
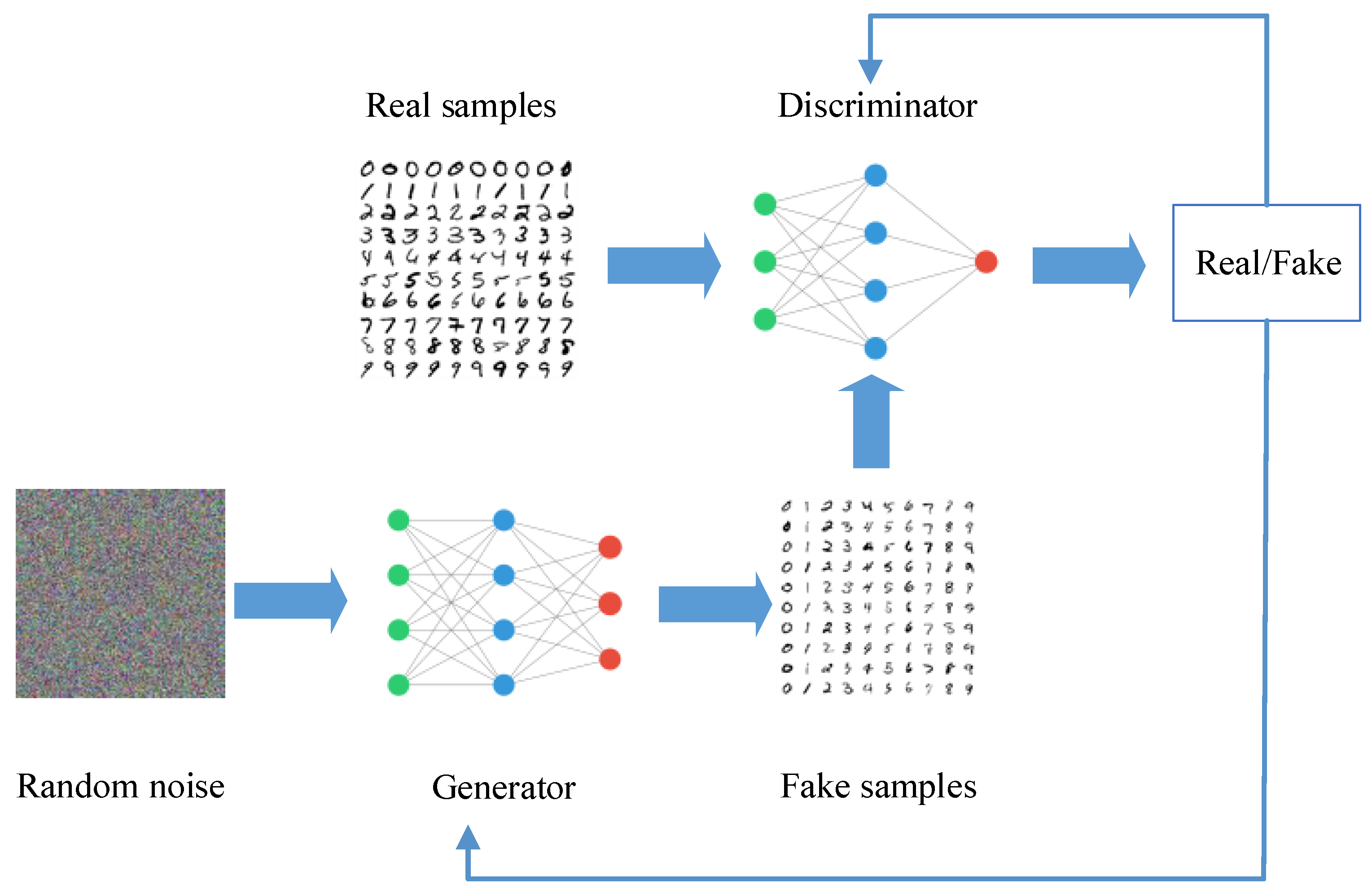
3.2. Introduction to GAN
3.3. Architecture of LSTM-GAN
3.3.1. The Basic Structure
3.3.2. Loss Function
4. Experiments and Analysis
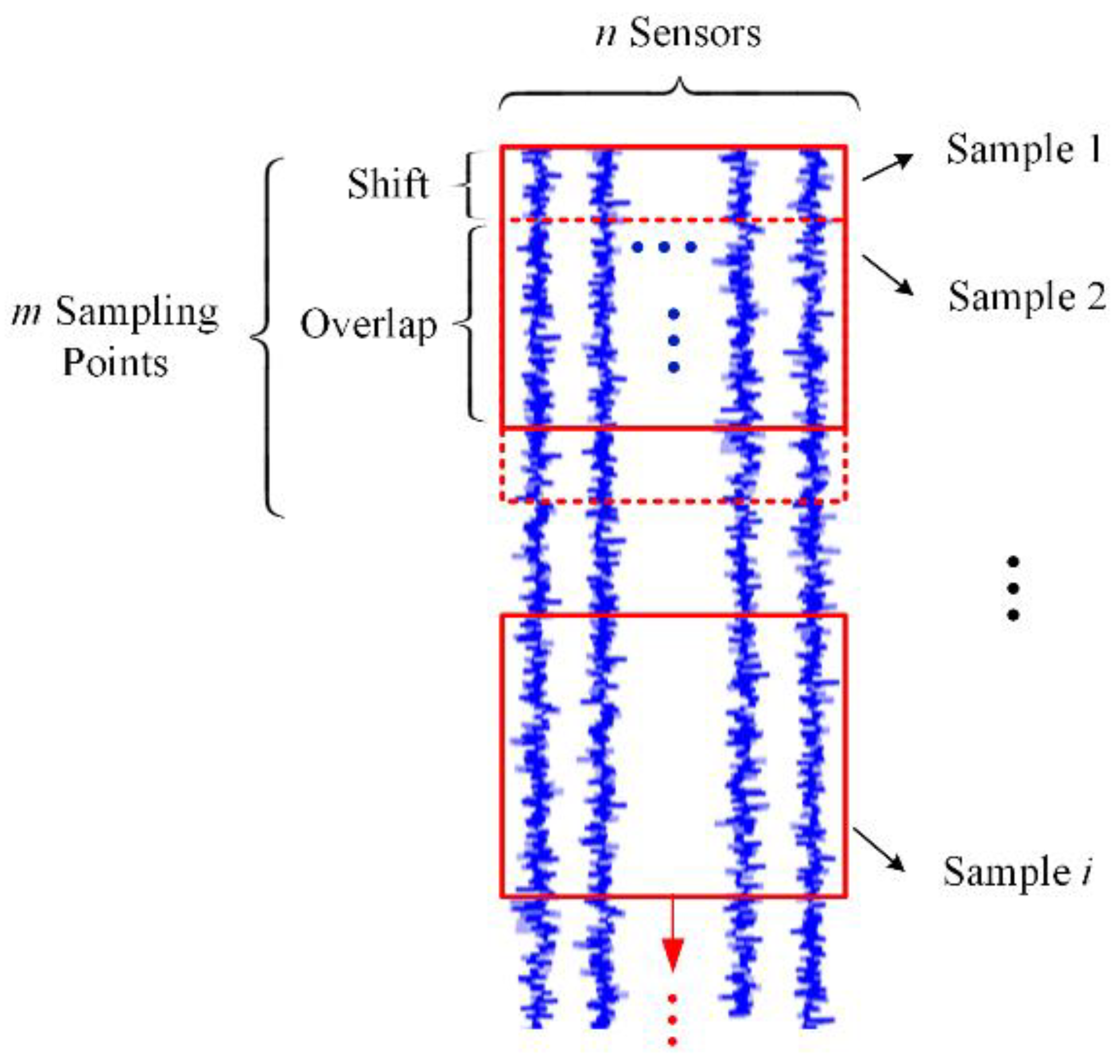
4.1. Data Preprocessing
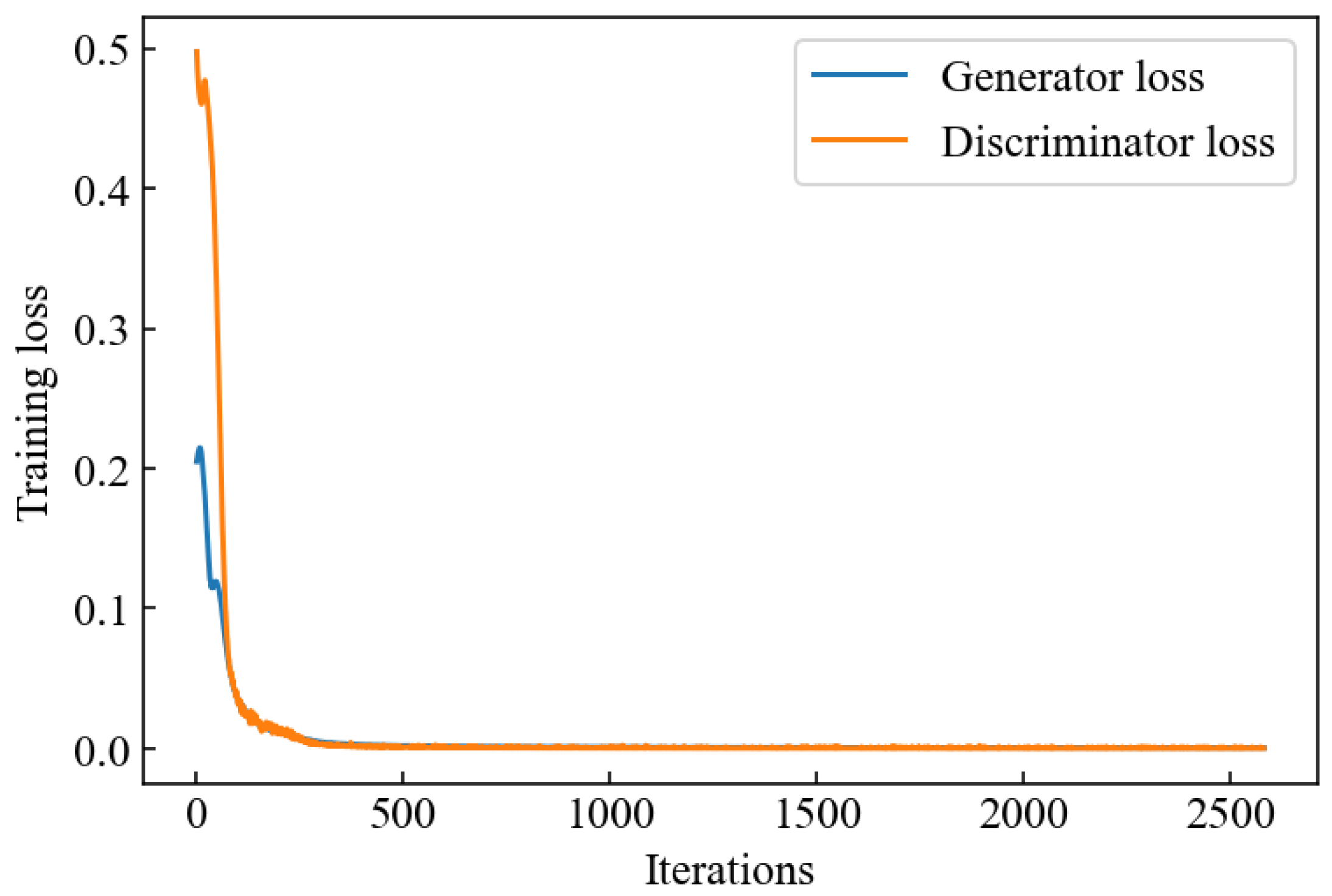
4.2. Model Training
4.3. Evaluating Indicator
4.4. Fault Detection Based on Discriminator
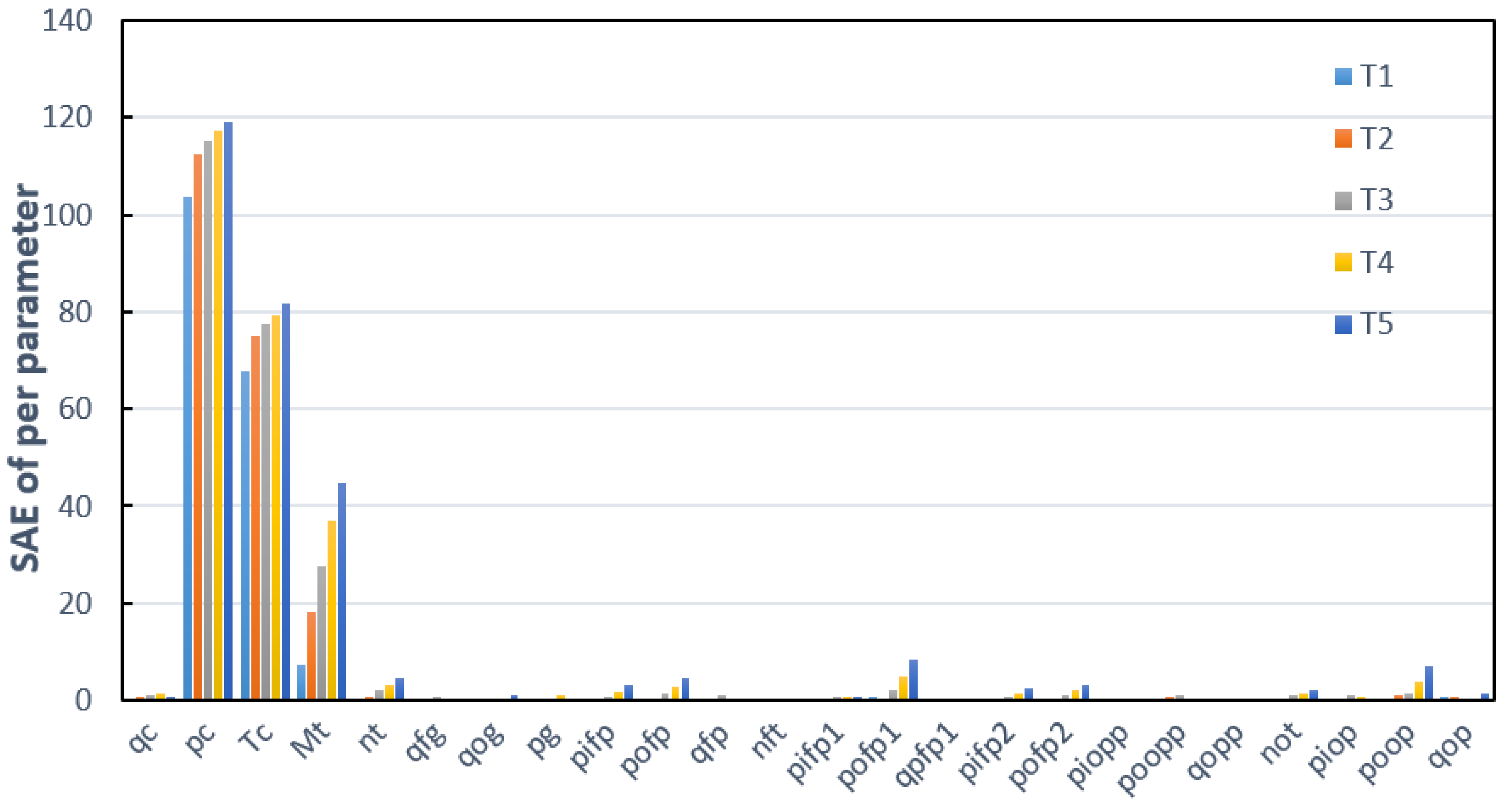
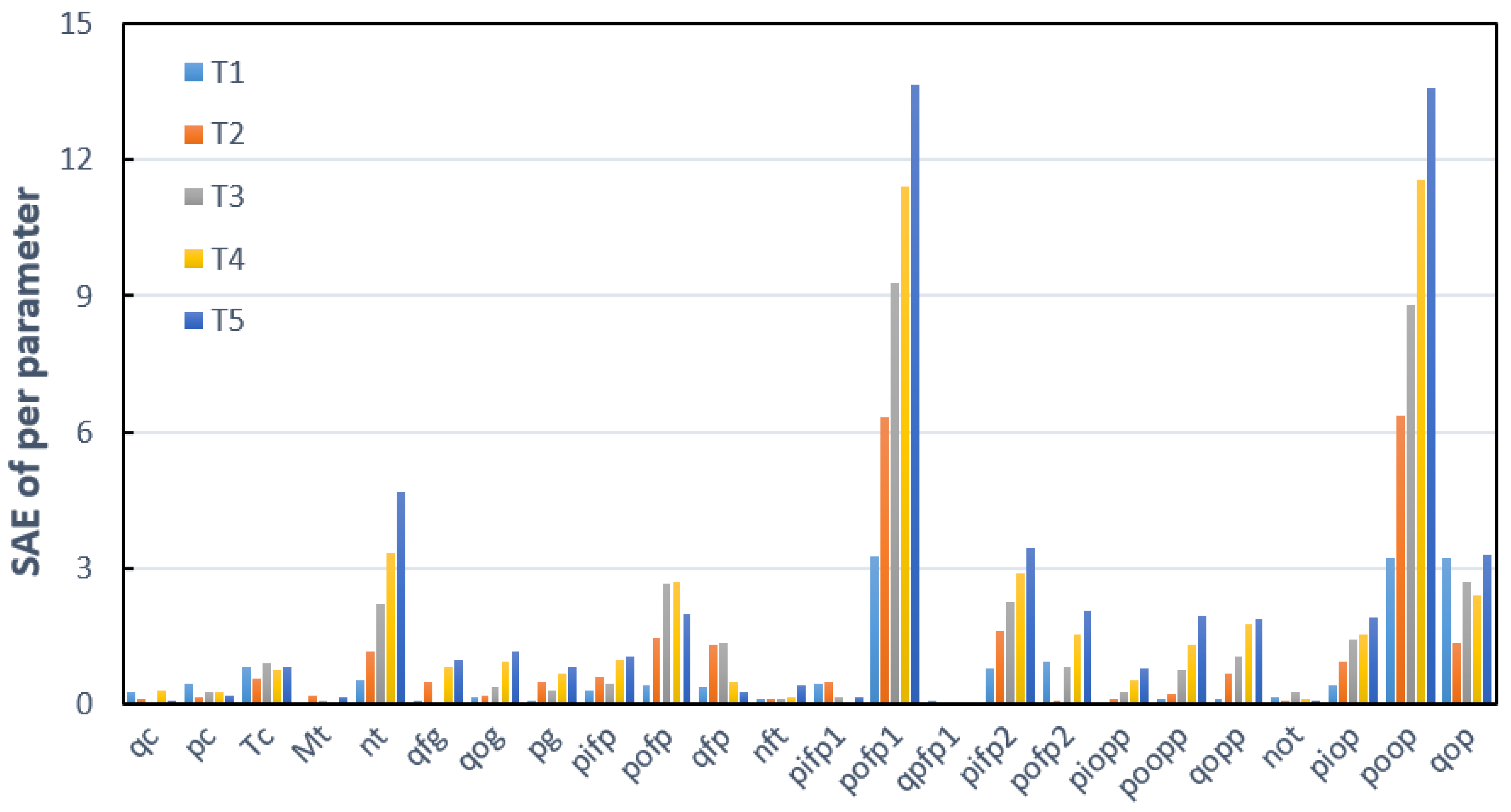
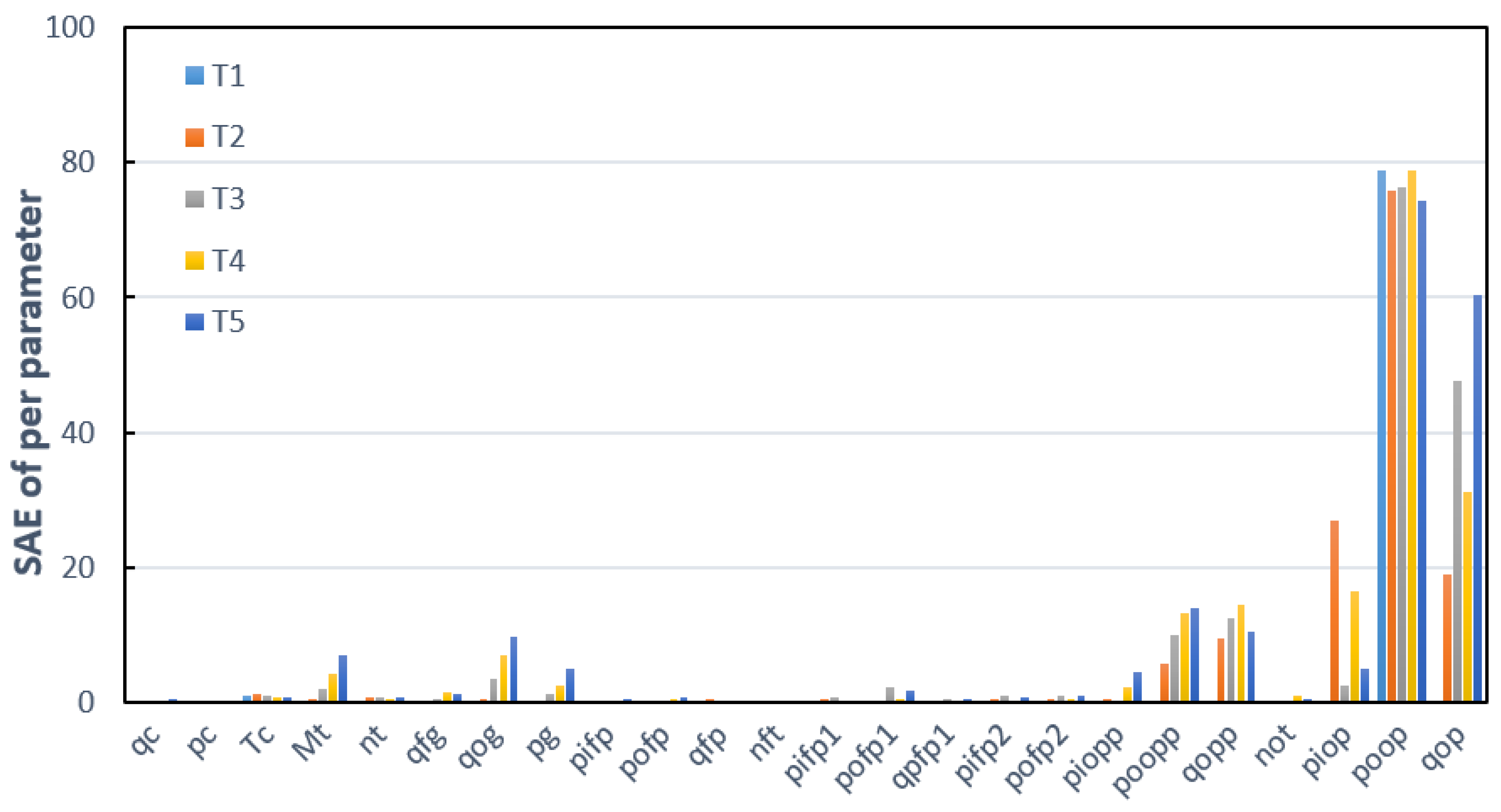
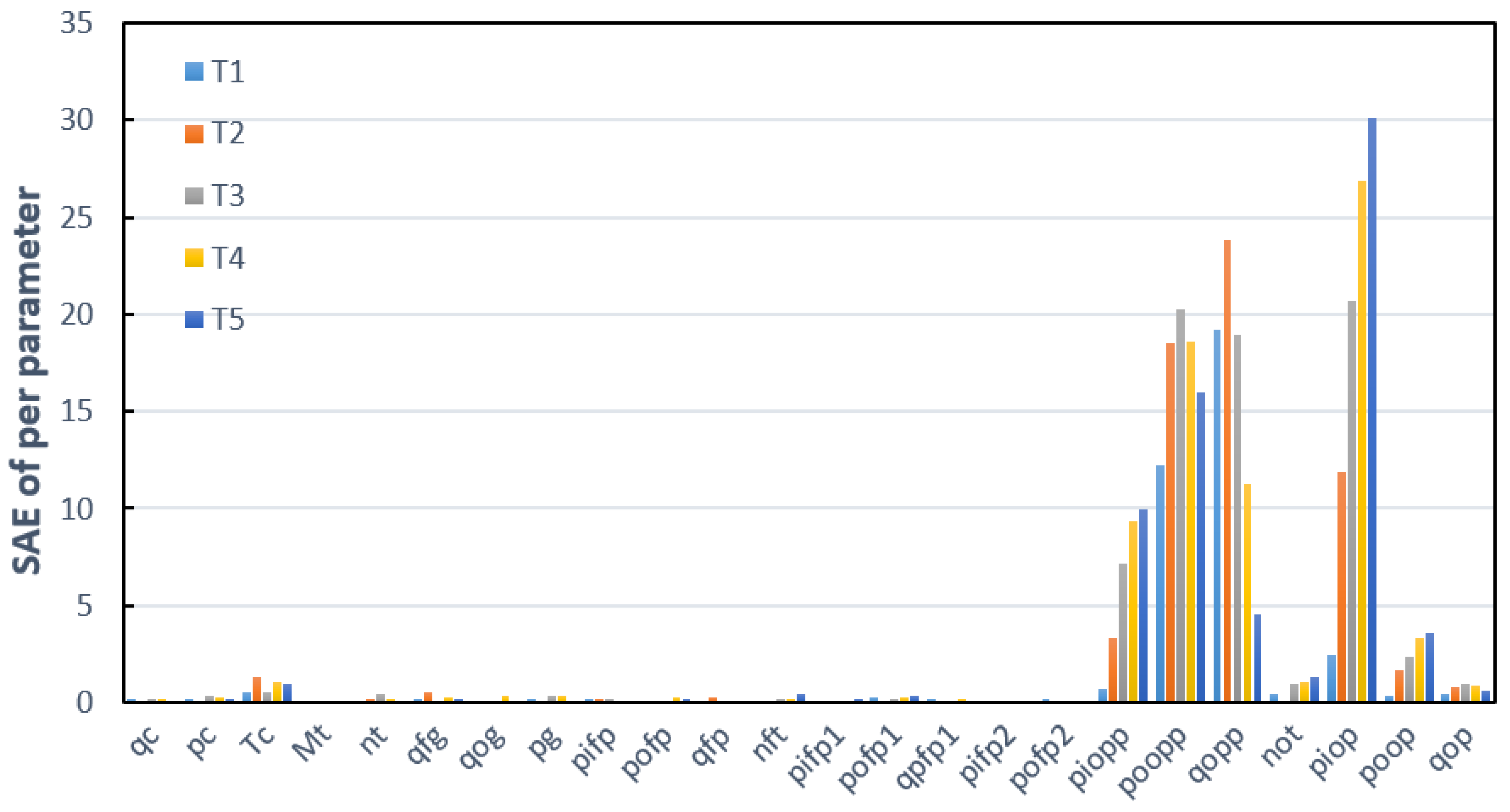
4.5. Fault Diagnosis Based on Generator
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jue, F.; Kuck, F. Space Shuttle Main Engine (SSME) Options for the Future Shuttle. In Proceedings of the 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Indianapolis, Indiana, 7–10 July 2002. [Google Scholar] [CrossRef] [Green Version]
- Wu, J. Liquid-propellant Rocket Engines Health-monitoring-a survey. Acta Astronaut. 2005, 56, 347–356. [Google Scholar] [CrossRef]
- Hawman, M.W. Health Monitoring System for the SSME-Program Overview. In Proceedings of the 26th Joint Propulsion Conference, Orlando, FL, USA, 16–18 July 1990. American Institute of Aeronautics and Astronautics: 1990–1987. [Google Scholar] [CrossRef]
- Pettit, C.D.; Barkhoudarian, S.; Daumann, A.G.; Provan, G.M.; Glover, D.E. Reusable Rocket Engine Advanced Health Management System: Architecture and Technology Evaluation Summary. In Proceedings of the 35th Joint Propulsion Conference and Exhibit, Los Angeles, CA, USA, 20–24 June 1999. [Google Scholar] [CrossRef]
- Venneri, S. NASA’s Space Launch Initiative. In Space and Aeronautics Committee on Science; U.S. Government Printing Office: Washington, DC, USA, 2002. [Google Scholar]
- Grey, J. NASA’s Integrated Space Transportation Plan and Orbital Space Plane Program. In Space and Aeronautics Committee on Science; U.S. Government Printing Office: Washington, DC, USA, 2003. [Google Scholar]
- O’Reilly, D. System for Anomaly and Failure Detection (SAFD) System Development; NASA: Washington, DC, USA, 1993; Volume 220. Available online: https://ntrs.nasa.gov/citations/19940019701 (accessed on 20 July 2022).
- Nemeth, E.; Anderson, R. An Advanced Intelligent Control System Framework. In Proceedings of the 28th Joint Propulsion Conference and Exhibit, Nashville, TN, USA, 6–8 July 1992. [Google Scholar] [CrossRef]
- Nemeth, E. Health Management System for Rocket Engines; NASA: Washington, DC, USA, 1990; Volume 250. Available online: https://ntrs.nasa.gov/citations/19900014258 (accessed on 20 July 2022).
- Schwabacher, M.; Samuel, J.; Brownston, L. The NASA Integrated Vehicle Health Management Technology Experiment for X-37. In Proceedings of the SPIE Aero Sense 2002 Symposium, Orlando, FL, USA, 16 July 2002; Available online: https://www.spiedigitallibrary.org/conference-proceedings-of-spie/4733/0000/NASA-integrated-vehicle-health-management-technology-experiment-for-X-37/10.1117/12.475494.short?SSO=1 (accessed on 20 July 2022).
- Fiorucci, T.R.; Lakin, D.R., II; Reynolds, T.D. Advanced Engine Health Management Applications of the SSME Real-time Vibration Monitoring System. In Proceedings of the 36th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Las Vegas, NV, USA, 24–28 July 2000. [Google Scholar] [CrossRef] [Green Version]
- Dvidson, M.; Stephens, J. Advanced Health Management System for the Space Shuttle Main Engine. In Proceedings of the 340th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Fort Lauderdale, FL, USA, 11–14 July 2004. [Google Scholar] [CrossRef] [Green Version]
- Martin, O.H. Enhancements to the Engine Data Interpretation System (EDIS); NASA: Washington, DC, USA, 1993; Volume 130. Available online: https://ntrs.nasa.gov/citations/19940006360 (accessed on 20 July 2022).
- Hoyt, W.A.; Choate, T.D.; Whitehead, B.A. Automated Propulsion Data Screening Demonstration System; NASA: Washington, DC, USA, 1995; Volume 37. Available online: https://ntrs.nasa.gov/citations/19950023163 (accessed on 20 July 2022).
- Surko, P.; Zakrajsek, J.F. PTDS: Space Shuttle Main Engine Post Test Diagnostic Expert System for Turbopump Condition Monitoring; SAE Technical Paper: Warrendale, PA, USA, 1992. [Google Scholar] [CrossRef]
- Liu, H.; Xie, T.; Huang, Q.; Wu, J. A Real-time Fault Detection and Post-test Diagnosis System for Liquid-propellant Rocket Engines in Ground Tests. In Proceedings of the 58th International Astronautical Congress, Hyderabad, India, 24–28 September 2007. [Google Scholar]
- Hu, L.; Hu, N.Q.; Zhang, X. Novelty Detection Methods for Online Health Monitoring and Post Data Analysis of Turbopumps. J. Mech. Sci. Technol. 2013, 27, 1933–1942. [Google Scholar] [CrossRef] [Green Version]
- Cha, J.; Ko, S.; Park, S.P. Fault Detection and Diagnosis Algorithms for Transient State of An Open-cycle Liquid Rocket Engine Using Nonlinear Kalman filter Methods. Acta Astronaut. 2019, 163, 147–156. [Google Scholar] [CrossRef]
- Xu, L.; Zhao, S.; Li, N. Application of QGA-BP for Fault Detection of Liquid Rocket Engines. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2464–2472. [Google Scholar] [CrossRef]
- Dai, W.; Liang, K.; Wang, B. State Monitoring Method for Tool Wear in Aerospace Manufacturing Processes Based on a Convolutional Neural Network (CNN). Aerospace 2021, 8, 335. [Google Scholar] [CrossRef]
- Du, X.; Chen, J.; Zhang, H.; Wang, J. Fault Detection of Aero-Engine Sensor Based on Inception-CNN. Aerospace 2022, 9, 236. [Google Scholar] [CrossRef]
- Zhou, S.; Wei, C.; Li, P.; Liu, A.; Chang, W.; Xiao, Y. A Text-Driven Aircraft Fault Diagnosis Model Based on Word2vec and Stacking Ensemble Learning. Aerospace 2021, 8, 357. [Google Scholar] [CrossRef]
- Zhu, X.B.; Cheng, Y.Q.; Wu, J. Steady-state Process Fault Detection for Liquid Rocket Engines Based on Convolutional Auto-encoder and One-class SVM. IEEE Access 2020, 8, 3144–3158. [Google Scholar] [CrossRef]
- Xu, P.; Du, R.; Zhang, Z. Predicting Pipeline Leakage in Petrochemical System Through GAN and LSTM. Knowl. Based Syst. 2019, 175, 50–61. [Google Scholar] [CrossRef]
- Park, S.Y.; Ahn, J. Deep neural network approach for fault detection and diagnosis during startup transient of liquid-propellant rocket engine. Acta Astronaut. 2020, 177, 714–730. [Google Scholar] [CrossRef]
- Gu, K.; Zhang, Y.; Liu, X.; Li, H.; Ren, M. DWT-LSTM-Based Fault Diagnosis of Rolling Bearings with Multi-Sensors. Electronics 2021, 10, 2076. [Google Scholar] [CrossRef]
- Kaplan, H.; Tehrani, K.; Jamshidi, M. A Fault Diagnosis Design Based on Deep Learning Approach for Electric Vehicle Applications. Energies 2021, 14, 6599. [Google Scholar] [CrossRef]
- Zhu, H.; Yang, W.; Li, S.; Pang, A. An Effective Fault Detection Method for HVAC Systems Using the LSTM-SVDD Algorithm. Buildings 2022, 12, 246. [Google Scholar] [CrossRef]
- Ma, J.; Wang, X. Compound Fault Diagnosis of Rolling Bearing Based on ACMD, Gini Index Fusion and AO-LSTM. Symmetry 2021, 13, 2386. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, Z.; Wang, Z.; Wang, X. Fault Detection and Identification Method for Quadcopter Based on Airframe Vibration Signals. Sensors 2021, 21, 581. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Yu, Y.; Ahmed, H.O.A.; Darwish, M.; Nandi, A.K. Open-Circuit Fault Detection and Classification of Modular Multilevel Converters in High Voltage Direct Current Systems (MMC-HVDC) with Long Short-Term Memory (LSTM) Method. Sensors 2021, 21, 4159. [Google Scholar] [CrossRef] [PubMed]
- Goodfellow, I.; Pouget, A.J.; Mirza, M. Generative Adversarial Nets. In Proceedings of the 27th International Conference on Neural Information Processing Systems, Montreal, Canada, 8–13 December 2014; pp. 2672–2680. [Google Scholar]
- Wang, Z.; Wang, J.; Wang, Y. An Intelligent Diagnosis Scheme Based on Generative Adversarial Learning Deep Neural Networks and Its Application to Planetary Gearbox Fault Pattern Recognition. Neurocomputing 2018, 310, 213–222. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating Conditions | Test Number | Operating Condition Conversions/Fault Modes |
|---|---|---|
| Normal | 01, 02, 03, 04, 09 | Low operating condition–rated operating condition–high operating condition–rated operating condition–final operating condition |
| 05, 06, 07, 08 | Low operating condition–rated operating condition–final operating condition | |
| Steady-state faults | 11 | Combustion chamber throat ablation |
| 12 | Stuck bearing | |
| 13 | Cavitation of oxidant pump | |
| 14 | Blocked pipeline in front of oxidant pump | |
| Start-up transient faults | 15 | Blocked pipeline in front of oxidant pump |
| 16 | Main turbine rotor damage | |
| 17 | Stuck bearing |
| Components | Parameters | Acronyms | Components | Parameters | Acronyms |
|---|---|---|---|---|---|
| Combustion chamber | Inlet fuel flow | qc | Primary fuel pump | Inlet pressure | pifp1 |
| Pressure | pc | Outlet pressure | pofp1 | ||
| Temperature | Tc | Flow | qpfp1 | ||
| Gas generator | Inlet fuel flow | qfg | Oxidizer pre-pressure pump | Inlet pressure | piopp |
| Inlet oxidizer flow | qog | Outlet pressure | poopp | ||
| Pressure | pg | Flow | qopp | ||
| Main turbine | Torque | Mt | Secondary fuel pump | Inlet pressure | pifp2 |
| Rotation rate | Nt | Outlet pressure | pofp2 | ||
| Fuel pre-pressure pump | Inlet pressure | pifp | Oxidizer pump | Inlet pressure | piop |
| Outlet pressure | pofp | Outlet pressure | poop | ||
| Flow | qfp | Flow | qop | ||
| Fuel preload turbine | Rotation rate | nft | Oxidizer preload turbine | Rotation rate | not |
| Test No. | 10 × 24/s | 20 × 24/s | 30 × 24/s | 40 × 24/s | 50 × 24/s |
|---|---|---|---|---|---|
| 11 | 0.006 | 0.100 | 0.020 | 0.006 | 0.040 |
| 12 | 0.020 | 0.012 | / | / | / |
| 13 | 0.010 | 0.016 | 0.204 | 0.006 | 0.166 |
| 14 | 0.006 | 0.012 | 0.010 | 0.036 | 0.010 |
| 15 | 1.136 | 1.390 | 1.152 | 1.374 | 1.350 |
| 16 | 1.554 | 1.164 | / | 2.024 | 3.286 |
| 17 | 1.552 | 2.336 | / | 1.668 | 3.118 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, L.; Cheng, Y.; Shi, Y. Fault Detection and Diagnosis for Liquid Rocket Engines Based on Long Short-Term Memory and Generative Adversarial Networks. Aerospace 2022, 9, 399. https://doi.org/10.3390/aerospace9080399
Deng L, Cheng Y, Shi Y. Fault Detection and Diagnosis for Liquid Rocket Engines Based on Long Short-Term Memory and Generative Adversarial Networks. Aerospace. 2022; 9(8):399. https://doi.org/10.3390/aerospace9080399
Chicago/Turabian StyleDeng, Lingzhi, Yuqiang Cheng, and Yehui Shi. 2022. "Fault Detection and Diagnosis for Liquid Rocket Engines Based on Long Short-Term Memory and Generative Adversarial Networks" Aerospace 9, no. 8: 399. https://doi.org/10.3390/aerospace9080399
APA StyleDeng, L., Cheng, Y., & Shi, Y. (2022). Fault Detection and Diagnosis for Liquid Rocket Engines Based on Long Short-Term Memory and Generative Adversarial Networks. Aerospace, 9(8), 399. https://doi.org/10.3390/aerospace9080399