
A Strong Form Meshless Method for the Solution of FGM Plates

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Governing Equations
2.1. Governing Equation for Elastic FGM Plates
- (i)
- for KLT: , ,
- (ii)
- for FSDPT: , ,
- (iii)
- for TSDPT: , .
2.2. Governing Equation for Thermoelastic FGM Plates
- (i)
- Dirichlet type:
- (ii)
- Neumann type:
- (iii)
- Robin type:
- (i)
- Dirichlet type:
- (ii)
- Neumann type:
- (iii)
- Robin type:
3. Meshless Approximations of Field Variables by Moving Least Square Approximation
4. Numerical Examples
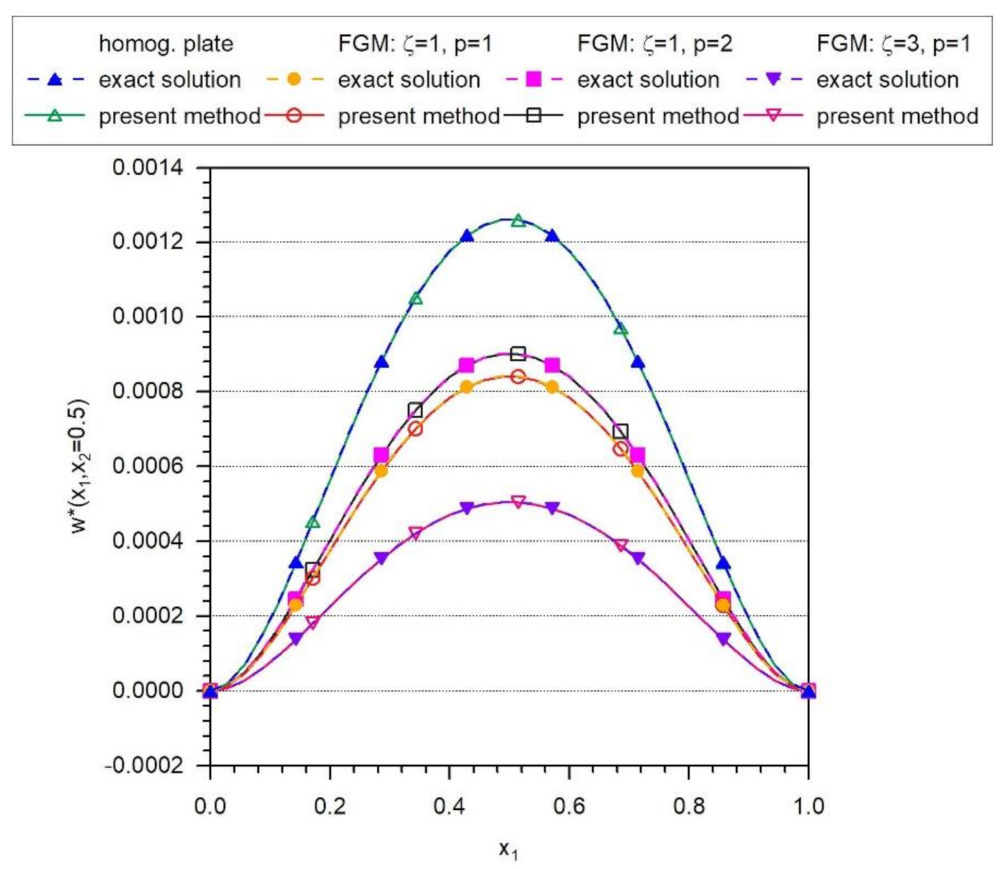
4.1. Verification of Presented Numerical Method
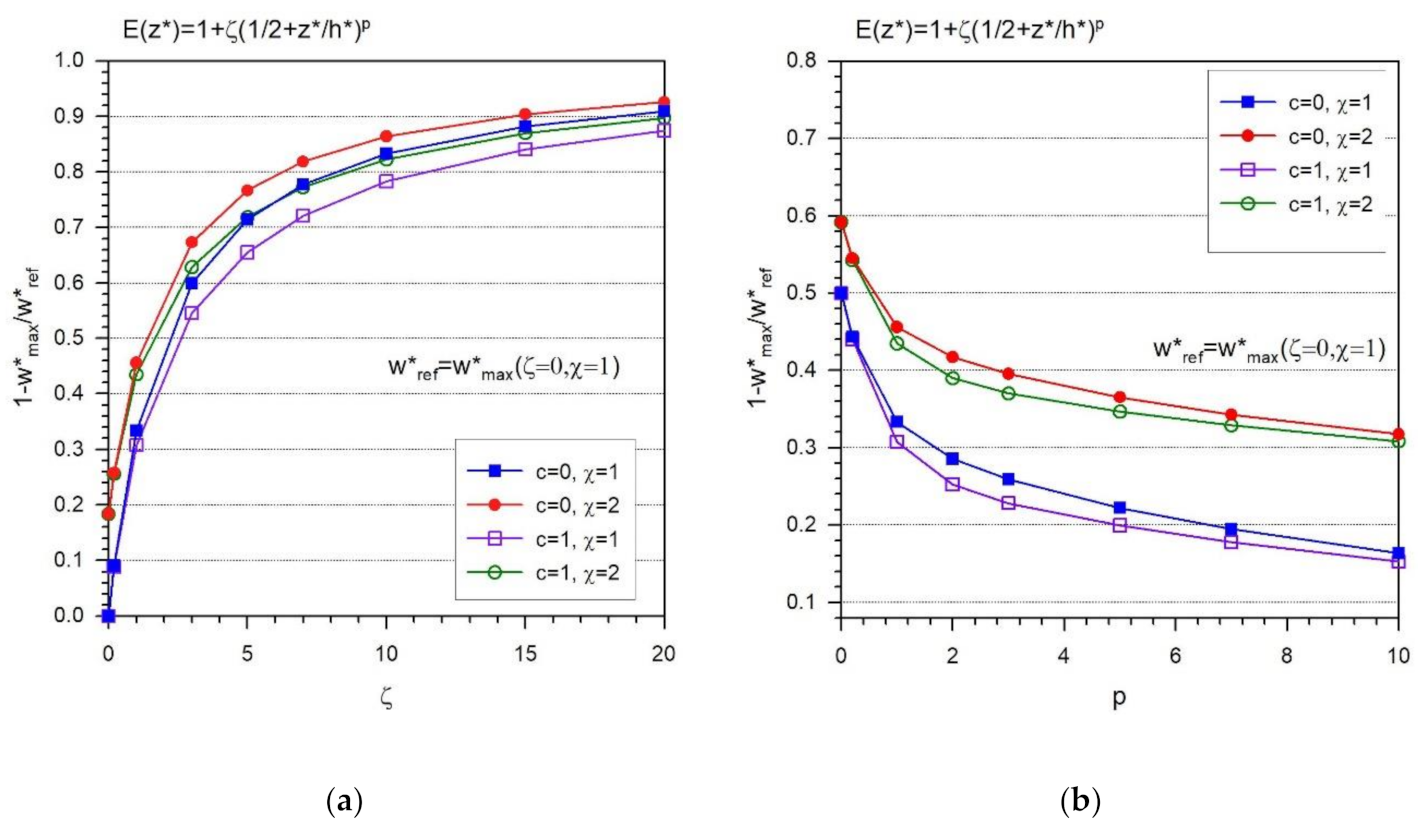
4.2. Study of Coupling in FGM Plates under Static Mechanical Loading
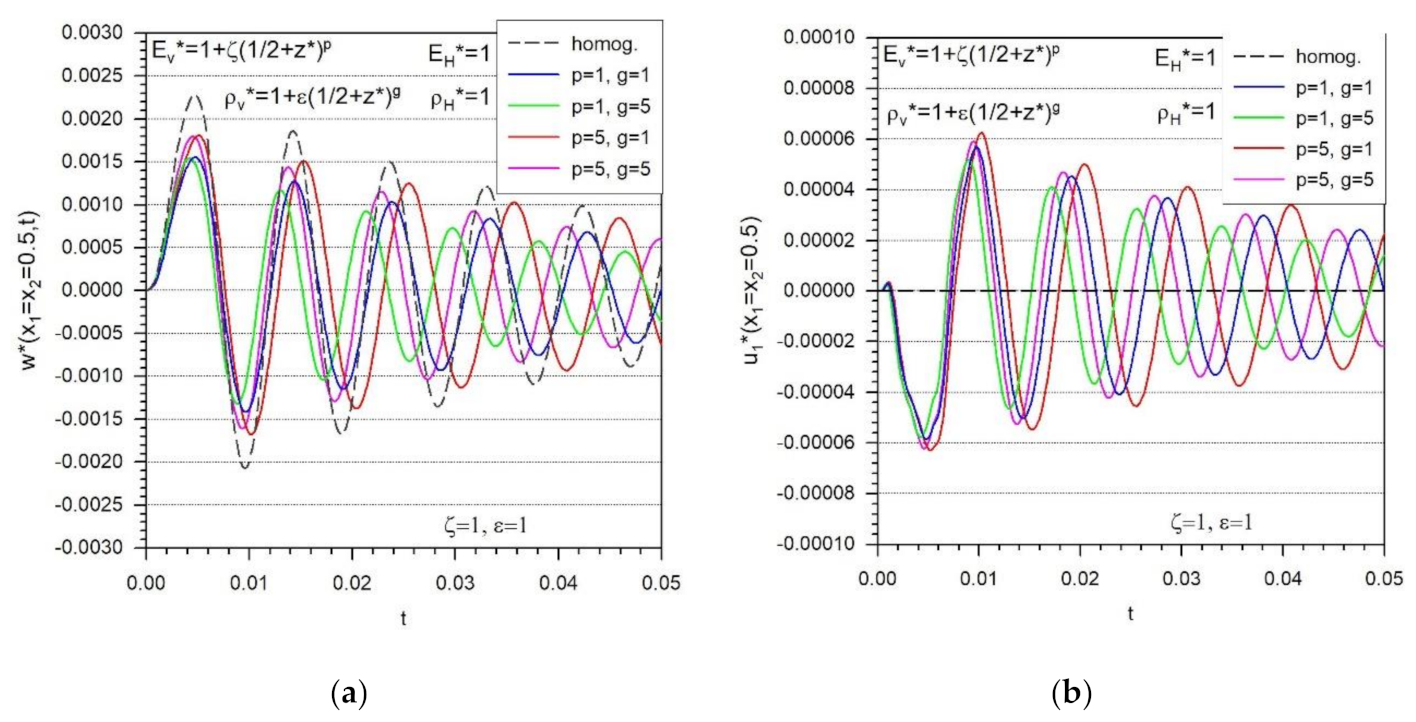
4.3. Response of FGM Plates under Transient Mechanical Loading
- a.
- Without gradation of material coefficients ().
- b.
- With transversal gradation of mass density only ().
- c.
- With transversal gradation of elastic modulus only ().
- d.
- With transversal gradation of elastic modulus and mass density ().
4.4. Response of FGM Plates under Transient Thermal Loading
5. Conclusions
- (i)
- The proposed unified formulation for plate bending problems allows:
- A unique treatment of plate bending problems with simple switching among three plate bending theories (classical Kirchhoff–Love theory, first-order shear deformation theory, third-order shear deformation theory), differing in various deformation assumptions;
- Physically correct derivation of governing equations and possible boundary conditions using variation principles;
- To study the response of linear elastic plates with functionally graded material properties to static as well as dynamic mechanical and thermal loadings;
- Comparison of results by three various theories using the same mathematical treatment.
- (ii)
- The developed advanced meshless method is characterized by:
- Efficient solution of systems of partial differential equations with variable coefficients (due to functional gradation of material coefficients) with the same demands as in the case of homogeneous media;
- Decomposition of the original fourth-order PDE to the system of the second-order PDE;
- Enhanced accuracy of approximation of higher-order derivatives;
- Improvement of computational efficiency by using the strong formulation;
- Overcoming shortcomings of the standard finite element method with preserving its universality.
- (iii)
- A study of coupling effects by numerical simulations revealed:
- The reliability (convergence and accuracy) and computational efficiency of developed numerical techniques;
- The functional dependence of material coefficients gives rise to coupling effects among the field variables including the interaction between the in-plane deformation and bending modes;
- To assess the influence of functional gradation parameters on the response of FGM plates to external loadings.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, Y.; Park, J. A theory for the free vibration of a laminated composite rectangular plate with holes in aerospace applications. Compos. Struct. 2020, 251, 112571. [Google Scholar] [CrossRef]
- Prasad, K.R.; Syamsundar, C. Theoretical and FE analysis of epoxy composite pressure cylinder used for aerospace applications. Mater. Today Proc. 2019, 19, 1–9. [Google Scholar] [CrossRef]
- Krishnadasan, C.K.; Shanmugam, N.S.; Sivasubramonian, B.; Rao, B.N.; Suresh, R. Analytical studies and numerical predictions of stresses in shear joints of layered composite panels for aerospace applications. Compos. Struct. 2021, 255, 112927. [Google Scholar] [CrossRef]
- Nunes, J.P.; Silva, J.F. 5—Sandwiched composites in aerospace engineering. In Advanced Composite Materials for Aerospace Engineering; Rana, S., Fangueiro, R., Eds.; Woodhead Publishing: Cambridge, UK, 2016; pp. 129–174. [Google Scholar]
- Dhas, J.E.R.; Arun, M. A review on development of hybrid composites for aerospace applications. Mater. Today Proc. 2022, 64, 267–273. [Google Scholar] [CrossRef]
- Klemperer, C.J.; Maharaj, D. Composite electromagnetic interference shielding materials for aerospace applications. Compos. Struct. 2009, 91, 467–472. [Google Scholar] [CrossRef]
- Dai, H.-L.; Dai, T. Analysis for the thermoelastic bending of a functionally graded material cylindrical shell. Meccanica 2014, 49, 1069–1081. [Google Scholar] [CrossRef]
- Icardi, U.; Sola, F. Optimization of variable stiffness laminates and sandwiches undergoing impulsive dynamic loading. Aerospace 2015, 2, 602–626. [Google Scholar] [CrossRef]
- Sleight, D.W. Progressive Failure Analysis Methodology for Laminated Composite Structures; NASA/TP-1999-209107; NASA Center for AeroSpace Information (CASI): Hanover, MD, USA, 1999. [Google Scholar]
- Bezzie, Y.M.; Paramasivam, V.; Tilahun, S.; Selvaraj, S.K. A review on failure mechanisms and analysis of multidirectional laminates. Mater.-Today-Proc. 2021, 46, 7380–7388. [Google Scholar] [CrossRef]
- Hasan, M.Z. Interface failure of heated GLARETM fiber-metal laminates under bird strike. Aerospace 2020, 7, 28. [Google Scholar] [CrossRef]
- Wang, Y.Q.; Zu, J.W. Nonlinear dynamic thermoelastic response of rectangular FGM plates with longitudinal velocity. Compos. Part B Eng. 2017, 117, 74–88. [Google Scholar] [CrossRef]
- Jafarinezhad, M.R.; Eslami, M.R. Coupled thermoelasticity of FGM annular plate under lateral thermal shock. Compos. Struct. 2017, 168, 758–771. [Google Scholar] [CrossRef]
- Demirbas, M.D. Thermal stress analysis of functionally graded plates with temperature-dependent material properties using theory of elasticity. Compos. Part B Eng. 2017, 131, 100–124. [Google Scholar] [CrossRef]
- Yang, B.; Mei, J.; Chen, D.; Yu, F.; Yang, J. 3D thermo-mechanical solution of transversely isotropic and functionally graded graphene reinforced elliptical plates. Compos. Struct. 2018, 184, 1040–1048. [Google Scholar] [CrossRef]
- Reddy, J.N. Analysis of functionally graded plates. Int. J. Numer. Methods Eng. 2000, 47, 663–684. [Google Scholar] [CrossRef]
- Reddy, J.N.; Cheng, Z.Q. Three-dimensional thermomechanical deformations of functionally graded rectangular plates. Eur. J. Mech. Solids 2001, 20, 841–855. [Google Scholar] [CrossRef]
- Minh, P.P.; Manh, D.T.; Duc, N.D. Free vibration of cracked FGM plates with variable thickness resting on elastic foundations. Thin-Walled Struct. 2021, 161, 107425. [Google Scholar] [CrossRef]
- Adineh, M.; Kadkhodayan, M. Three-dimensional thermo-elastic analysis and dynamic response of a multi-directional functionally graded skew plate on elastic foundation. Compos. Part B Eng. 2017, 125, 227–240. [Google Scholar] [CrossRef]
- Yang, J.; Shen, H.S. Vibration characteristics and transient response of shear deformable functionally graded plates in thermal environments. J Sound Vib 2002, 255, 579–602. [Google Scholar] [CrossRef]
- Hashempoor, D.; Shojaeifard, M.H.; Talebitooti, R. Analytical modeling of functionally graded plates under general transversal loads. Proc. Rom. Acad. Ser. A 2013, 14, 309–316. [Google Scholar]
- Qin, S.; Wei, G.; Liu, Z.; Su, G. The elastic dynamics analysis of FGM using a meshless RRKPM. Eng. Anal. Bound. Elem. 2021, 129, 125–136. [Google Scholar] [CrossRef]
- Yang, J.; Shen, H.S. Non-linear analysis of functionally graded plates under transverse and in-plane loads. Int. J. Non-Linear Mech. 2003, 38, 467–482. [Google Scholar] [CrossRef]
- Daniel, I.M.; Ishai, O. Engineering Mechanics of Composite Materials; Oxford University Press: New York, NY, USA, 2006. [Google Scholar]
- Bhandari, M.; Purohit, K. Analysis of functionally graded material plate under transverse load for various boundary conditions. J. Mech. Civ. Eng. (IOSR-JMCE) 2014, 10, 46–55. [Google Scholar] [CrossRef]
- Ying, J.; Lu, C.; Lim, C.W. 3D thermoelasticity solutions for functionally graded thick plates. J. Zhejiang Univ. Sci. A 2009, 10, 327–336. [Google Scholar] [CrossRef]
- Ferreira, A.J.M.; Batra, R.C.; Roque, C.M.C.; Qian, L.F.; Martins, P.A.L.S. Static analysis of functionally graded plates using third order shear deformation theory and a meshless method. Compos. Struct 2005, 69, 449–457. [Google Scholar] [CrossRef]
- Suresh, S.; Mortensen, A. Fundamentals of Functionally Graded Materials, 1st ed.; IOM Communications: London, UK, 1998. [Google Scholar]
- Koizumi, M. FGM activities in Japan. Compos. Part B 1997, 28, 1–4. [Google Scholar] [CrossRef]
- Benveniste, Y. A new approach to the application of Mori–Tanaka’s theory in composite materials. Mech. Mater. 1987, 6, 147–157. [Google Scholar] [CrossRef]
- Mori, T.; Tanaka, T. Average stress in matrix and average elastic energy of materials with misfitting inclusions. Acta Met. 1973, 21, 571–574. [Google Scholar] [CrossRef]
- Hashin, Z.; Rosen, B.W. The elastic moduli of fiber-reinforced materials. ASME J. Appl. Mech. 1964, 4, 223–232. [Google Scholar] [CrossRef]
- Hashin, Z. Analysis of properties of fiber composites with anisotropic constituents. ASME J. Appl. Mech. 1979, 46, 543–550. [Google Scholar] [CrossRef]
- Chamis, C.C.; Sendeckyj, G.P. Critique on theories predicting thermoelastic properties of fibrous composites. J. Compos. Mater 1968, 3, 332–358. [Google Scholar] [CrossRef]
- Gibson, R.F. Principles of Composite Material Mechanics; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Ardestani, M.M.; Soltani, B.; Shams, S. Analysis of functionally graded stiffened plates based on FSDT utilizing reproducing kernel particle method. Compos. Struct. 2014, 112, 231–240. [Google Scholar] [CrossRef]
- Vel, S.S.; Batra, R.C. Exact solution for thermoelastic deformations of functionally graded thick rectangular plates. AIAAJ 2002, 40, 1421–1433. [Google Scholar] [CrossRef]
- Reddy, J.N.; Wang, C.M.; Kitipornchai, S. Axisymmetric bending of functionally graded circular and annular plates. Eur. J. Mech. A/Solids 1999, 18, 185–199. [Google Scholar] [CrossRef]
- Xu, Y.; Zhou, D. Three-dimensional elasticity solution of functionally graded rectangular plates with variable thickness. Compos. Struct. 2009, 91, 56–65. [Google Scholar] [CrossRef]
- Atluri, S.N. The Meshless Method, (MLPG) For Domain & BIE Discretizations; Tech Science Press: Encino, CA, USA, 2004. [Google Scholar]
- Krysl, P.; Belytschko, T. Analysis of thin plates by the element-free Galerkin method. Comput. Mech. 1995, 17, 26–35. [Google Scholar] [CrossRef]
- Lu, Y.Y.; Belytschko, T.; Gu, L. A new implementation of the element free Galerkin method. Comp. Meth. Appl. Mech. Eng. 1994, 113, 397–414. [Google Scholar] [CrossRef]
- Lancaster, P.; Salkauskas, K. Surfaces generated by moving least square method. Math. Comput. 1981, 37, 141–158. [Google Scholar] [CrossRef]
- Sladek, V.; Sladek, J.; Zhang, C. Computation of stresses in non-homogeneous elastic solids by local integral equation method: A comparative study. Comput. Mech. 2008, 41, 827–845. [Google Scholar] [CrossRef]
- Sladek, V.; Sladek, J.; Zhang, C. Local integral equation formulation for axially symmetric problems involving elastic FGM. Eng. Anal. Bound. Elem. 2008, 32, 1012–1024. [Google Scholar] [CrossRef]
- Sladek, V.; Sladek, J. Local integral equations implemented by MLS approximation and analytical integrations. Eng. Anal. Bound. Elem. 2010, 34, 904–913. [Google Scholar] [CrossRef]
- Sladek, V.; Sladek, J.; Sator, L. Physical decomposition of thin plate bending problems and their solution by mesh-free methods. Eng. Anal. Bound. Elem. 2013, 37, 348–365. [Google Scholar] [CrossRef]
- Sator, L.; Sladek, V.; Sladek, J. Elastodynamics of FGM plates by meshfree method. Compos. Struct 2016, 40, 100–110. [Google Scholar]
- Sator, L.; Sladek, V.; Sladek, J. Coupling effects in elastic analysis of FGM plates under thermal load: Classical thermoelasticitz analysis by a meshless methods. Compos. Part B 2018, 146, 176–188. [Google Scholar] [CrossRef]
- Sator, L.; Sladek, V.; Sladek, J. Bending of FGM composite plates by mesh-free methods. Compos. Struct 2014, 115, 309–322. [Google Scholar] [CrossRef]
- Timoshenko, S.P.; Woinowsky-Krieger, S. Theory of Plates and Shells; McGraw-Hill: New York, NY, USA, 1959. [Google Scholar]
- Sladek, V.; Sladek, J.; Zhang, C. On increasing computational efficiency of local integral equation method combined with meshless implementations. CMES 2010, 63, 243–263. [Google Scholar]
- Liu, M.; Gorman, D.G. Formulation of Rayleigh damping and its extensions. Comput. Struct. 1995, 57, 277–285. [Google Scholar] [CrossRef]
- Hashamdar, H.; Ibrahim, Z.; Jameel, M. Finite element analysis of nonlinear structures with Newmark method. Int. J. Phys. Sci. 2011, 6, 61395–61403. [Google Scholar]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sator, L.; Sladek, V.; Sladek, J. A Strong Form Meshless Method for the Solution of FGM Plates. Aerospace 2022, 9, 425. https://doi.org/10.3390/aerospace9080425
Sator L, Sladek V, Sladek J. A Strong Form Meshless Method for the Solution of FGM Plates. Aerospace. 2022; 9(8):425. https://doi.org/10.3390/aerospace9080425
Chicago/Turabian StyleSator, Ladislav, Vladimir Sladek, and Jan Sladek. 2022. "A Strong Form Meshless Method for the Solution of FGM Plates" Aerospace 9, no. 8: 425. https://doi.org/10.3390/aerospace9080425
APA StyleSator, L., Sladek, V., & Sladek, J. (2022). A Strong Form Meshless Method for the Solution of FGM Plates. Aerospace, 9(8), 425. https://doi.org/10.3390/aerospace9080425