1. Introduction
The morphing concept has the capability to enhance the overall performances of aircraft [
1]. One area of focus is to vary the geometry of the aircraft using an evolutionary morphing wing scheme for different flight conditions, with corresponding targets and requirements, such as a reliable cruise configuration or an efficient high-speed dash configuration [
2,
3]. The variable sweep wing is the first significant design for altering aircraft shape and can increase sweep angle for high-speed flight applications [
4]. As a potential morphing technology to achieve multitask requirements, large-scale morphing unmanned aerial vehicles (UAVs) based either on material or shape morphing mechanisms have emerged in recent years [
1]; these include shape memory alloy morphing UAV [
5], various gull-wing configurations [
6], span morphing UAV [
7], bioinspired wing morphing [
8,
9], variable span and variable sweep UAV [
10], etc. These UAVs are well-developed with the goal of obtaining optimal flight performance and adapting to different flight environments.
However, large-scale morphing will inevitably cause the inertia of moment, aerodynamics, and dynamics of the UAV to vary more dramatically [
11], and the generated time-varying and nonlinear characteristics will cause model uncertainty, which may affect the flight quality and even threaten the flight safety, especially during the transition process [
12]. Additionally, for variable sweep aircraft, sweep morphing can be considered as a new control input; when the aircraft transforms from one state to another with the sweep morphing command, the aircraft needs to be trimmed again with an elevator for the new balanceable state [
13]. Therefore, more attentions should be paid to the stability and controlling problems in the transition process of variable sweep UAV.
To evaluate the transition stability, the time-varying effects of the transition process must be considered. The gain scheduled control technique based on the LPV model has been proven to be an appropriate method for the aircraft’s time-varying dynamic effects [
14]. Yue et al. presented a gain self-scheduled H∞ robust control system for a tailless folding-wing morphing aircraft, which can keep the altitude and speed constant during the whole wing folding process [
15]. He et al. proposed a gain scheduled control design based on a tensor product model for morphing aircraft in the transition process [
16]. Moreover, a smooth switching gain scheduled controller was also applied on a variable sweep aircraft to guarantee the stability of the morphing phase [
17]. In addition, the gain scheduled method allows for arbitrary morphing rates of scheduled variables to adapt to the aircraft’s dynamic response, and it is able to maintain stability in various operating conditions [
18,
19,
20].
In the existing literature, the additional inertia forces and moments caused by morphing are always neglected and regarded as an unmodeled term. However, the effects on the dynamics of additional inertia forces and moments are inevitable during the morphing progress, especially at the onset and end of a morphing maneuver, and the dominant forces of the additional terms are proportional to the morphing velocities and accelerations of the wing mass components [
6]. Yan et al. found that a higher sweep morphing speed led to greater amplitudes of additional morphing forces and then greater amplitudes of the short-period mode parameters, and they proposed an adaptive super-twisting algorithm sliding mode controller that had good robustness for the effects of additional morphing forces [
21]. Dai et al. proposed a nonlinear disturbance observer to estimate the morphing force and moment and designed a nonlinear model predictive controller considering the estimated disturbances [
22]. In addition, with an appropriate morphing strategy, the additional inertia forces and moments can also be weakened, thereby relieving the burden of the control system [
23].
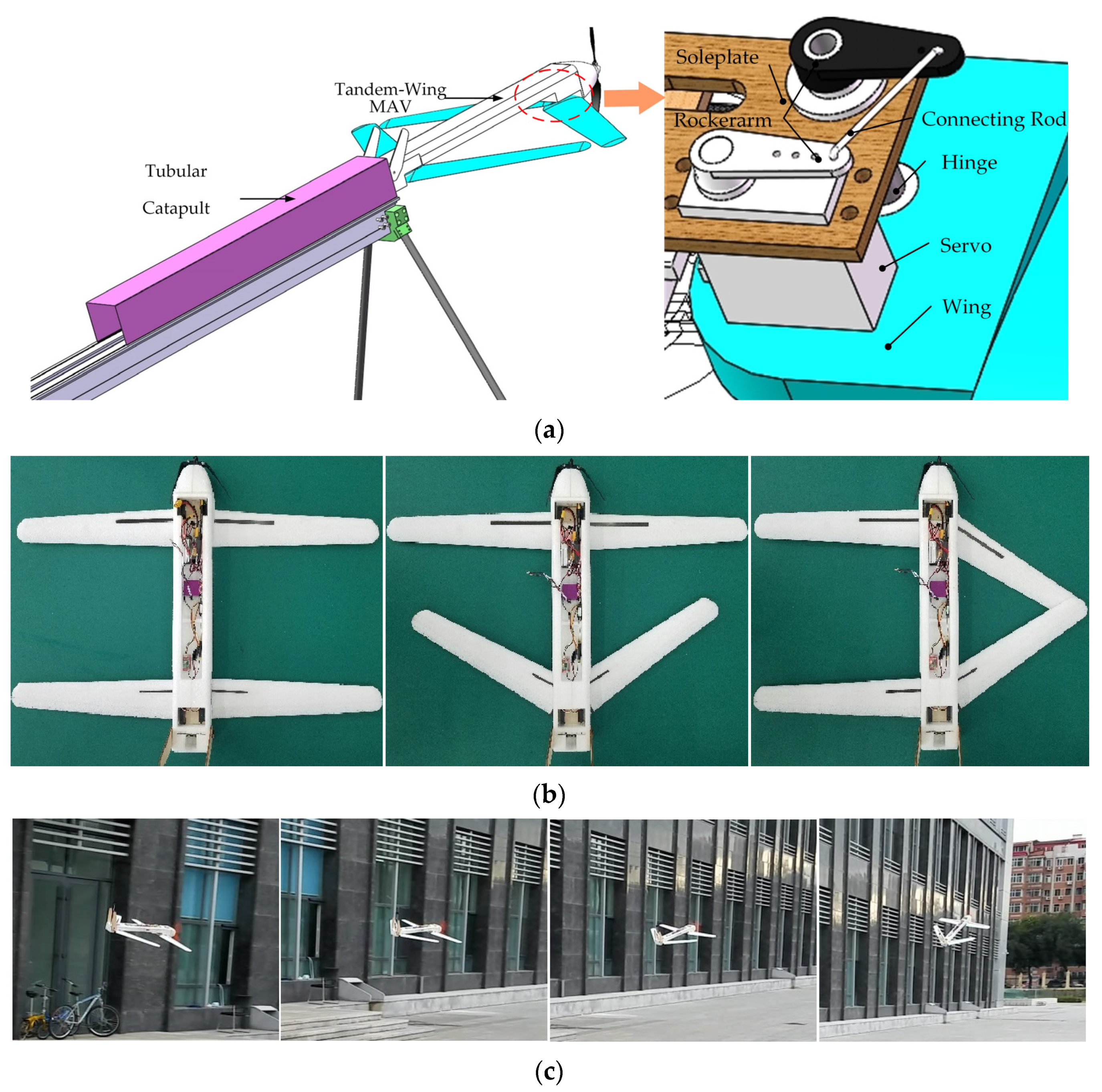
In this paper, an innovative morphing scheme is investigated to weaken the additional inertia forces and moments caused by morphing. The morphing scheme is based on the tandem-wing MAV in our previous work [
24]; the MAV has four variable sweep airfoils instead of conventional elevator and aileron, which can morph symmetrically or asymmetrically for pitch or roll control. Therefore, the shape control and flight control of the MAV are integrated, which is similar to that found in nature, inspiring us to explore appropriate morphing strategies for in-flight adaptability. Moreover, in order to satisfy multitask adaptability, the MAV needs to morph into loitering or dash configurations, which inevitably results in input saturation of the sweep morphing, which may degrade the performance of the control system or even lead to instability [
25]. This also motivated us to investigate the transition control with consideration of input saturation for such a tandem-wing MAV with variable sweep. Compared with the existing results, the primary contributions of this paper are summarized as follows:
(1) An innovative variable sweep scheme integrating shape control and flight control is applied on a tandem-wing MAV for multitask requirements; the morphing scheme not only weakens the additional inertia forces and moments, but also has no trim drag generated by the traditional elevator.
(2) A gain scheduled controller with the consideration of input saturation is proposed based on the LPV model to guarantee transition process stability and satisfactory flying performance, and to improve the robustness of the considered MAV.
The remainder of this paper is outlined as follows. In
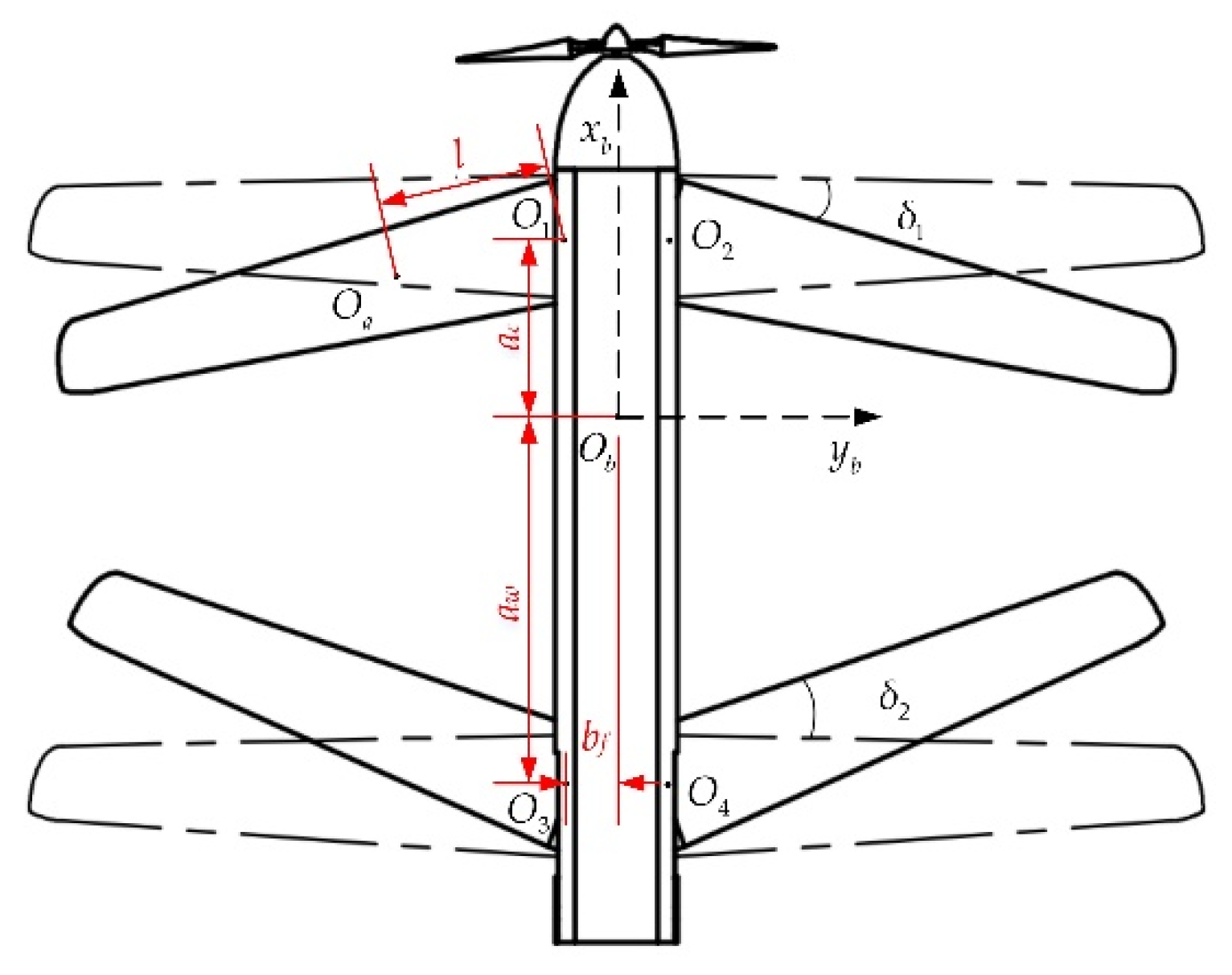
Section 2, the scheme of variable sweep is presented, and the aerodynamic characteristics are systematically investigated. In
Section 3, the longitudinal dynamic equations of the variable sweep MAV are linearized by the Jacobian linearization approach to achieve the LPV model, and dynamic response and longitudinal stability are analyzed. In
Section 4, a gain scheduled transition controller with the consideration of input saturation is designed based on a polytopic model to realize the required control objectives. In
Section 5, numerical simulation is carried out to verify the performance of the gain scheduled transition controller. Finally, conclusions based on the presented results are presented in
Section 6.
4. Gain Scheduled Transition Controller Synthesis with Input Saturation
According to the previous analysis, the MAV cannot remain stable all the time, especially during the transition process. Thus, the controller is designed to realize the two objectives with the consideration of input saturation:
(1) The close-loop system is asymptotic stable at the arbitrary frozen equilibrium condition.
(2) The close-loop system is affine quadratic stable during the morphing process.
4.1. Polytopic Model Conversion
If LPV systems can be converted to the polytopic model, due to the similarity between the polytope and convex hull, stability analysis and controller synthesis are only conducted for the subsystem of the vertices. The method will reduce the infinite constraints imposed on the LMIs formulation to a finite number, and it can also adjust to the variations in the plant dynamics in order to maintain stability [
28]. The gain scheduled robust control based on the convex hull algorithm is used to satisfy the performance requirement along all parameter trajectories; the LQR is used to guarantee the stability of the boundary point with the consideration of input saturation.
Notations: For real symmetric matrices, M, the notation M > 0 stands for positive definite and indicates that all the eigenvalues of M are positive. Similarly, M < 0 means negative definite, that is, all the eigenvalues of M are negative.
The LPV model of a variable sweep MAV can be transformed into the form as:
where
,
y is the output,
σ is a vector of scheduling variables that consists of system outputs and inputs depended on (14),
A(
σ),
B(
σ),
C(
σ) and
D(
σ) are the continuous state-space matrices depended affinely on
σ,
σ= (
p1,
p2,…,
pn) ∈
Θ,
pi ∈ [
pimin,
pimax], and
Θ is the set of all affine parameters,
σ, and has 2
n vertices; we define the set of vertices as
Θ0.
Definition 1. A matrix polytope is defined as the convex (Co) hull of a finite number of matrices, Ti, with the same dimensions [29]:where ρi represents the convex decomposition coefficient of the ith vertex of the polytopic model, which is a function of σ. Thus, a polytopic model can be written as:
where
is the polytopic subsystem matrix of the
ith vertex corresponding to the state vector
σi,
i = 1, 2, …,
k,
k = 2
n. The time-varying vector,
σ, varies within a polytope of vertices as:
and
The obtained polytopic model is different according to the different weighting rules. In order to achieve a more reliable control effect, it is necessary to select appropriate weighting rules to make the polytopic model more similar to the LPV model. For the LPV model of variable sweep MAV, the configuration matrices computed by (11)–(13) mainly vary with flight velocity,
V, and the angular variation ratio,
λ1 and
λ2, during the morphing process. However,
λ1 and
λ2 are not only independent morphing inputs but also flight control inputs whose relationship is dependent on (14). Considering this, we define the scheduling parameter of the variation ratio as
λ and
λ =
λ1 +
λ2. According to (11)–(13), using the least squares fitting method, the LPV model can be expressed as:
Therefore, the time-varying vector will be
σ = (
λ,
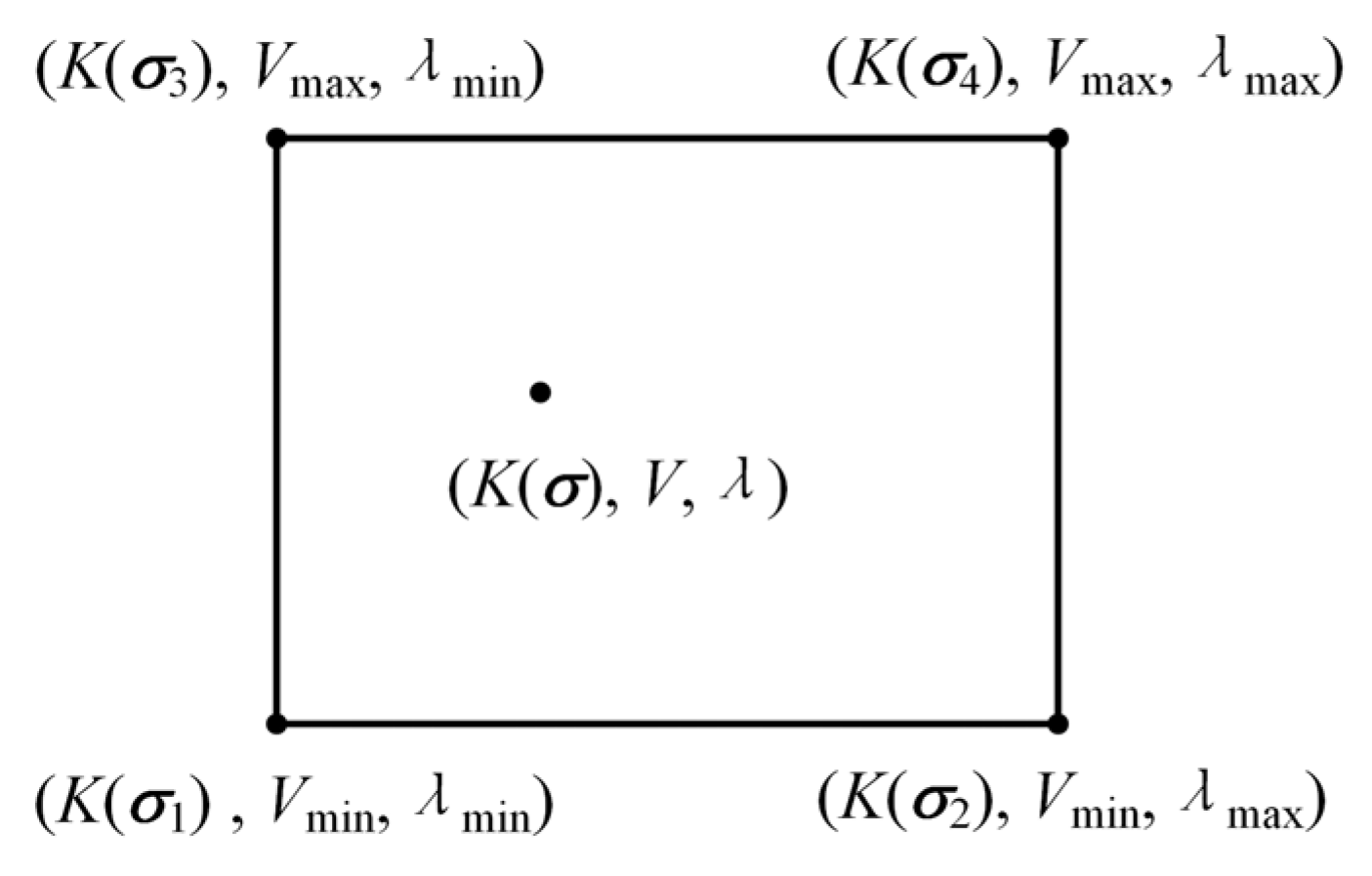
V), and a convex hull shown in
Figure 5 will be formed with four vertices given by following:
Because the LPV systems are linearly dependent on scheduling parameters,
σ, the convex decomposition coefficient can be written as follows, based on the interpolation algorithm:
Based on the above weighting rules, the LPV model can be approximately transformed into a polytopic model:
To evaluate the accuracy of the polytopic model,
ε(
σ) is defined as the relative mismatching error between the LPV model and polytopic model [
16], written as follows:
And
ε(
σ) is calculated using the matrix two-dimensional norm:
The calculation results are shown in
Figure 6. As can be seen, within the range of scheduling parameter variation, the average value of the mismatching error is about 2.9%, and the maximum value is less than 5%, which to some extent demonstrates the accuracy of the polytopic model.
4.2. Gain Scheduled Robust Control Design
Considering the polytopic model of the MAV, the gain scheduled controller is a state feedback controller in the form of the following to guarantee the affine quadratic stable of the system for all
σ ∈
Θ:
where:
Then, the close-loop system can be transformed into the form as follows:
According to the previous analysis of aerodynamic characteristics, the changes of aerodynamic characteristics are approximately linear with each control input. Therefore, we assume that
B(
σ) is a constant matrix as it varies in a very small range. According to this assumption,
Ac(
σ) depends affinely on
σ,
σ ∈
Θ, and:
Theorem 1 ([
30])
. The sufficient condition for affine quadratic stability of the LPV system governed by (28) is the existence of n + 1 symmetric matrices P0, P1, …, Pn, for all σ ∈ Θ0, satisfying the following LMIs:where: When the LMIs (30)–(32) are feasible,
V(
x,
σ) =
xTP(
σ)
x is a Lyapunov function of the system for all values,
σ ∈
Θ. Theorem 1 has been proven in [
30]. Theorem 1 relies on the concept of multi-convexity, and the additional constraint restrictions on
P(
σ) may increase conservatism; however, the resulting criterion will always improve on the standard quadratic stability. Furthermore, Theorem 1 can be combined with a branch-and-bound scheme to reduce conservatism through dividing the variables box into smaller hyperrectangles and reapplying Theorem 1 to each of these hyperrectangles. In our study, the scheduling variable,
pi, is assumed to be time-invariant and valued in the interval [
pimin,
pimax]; thus, it is easy to establish affine quadratic stability over the entire variables box [
30]. The affine LPV modeling method is based on the concept of convex hulls, and the multi-convexity requirement is equivalent to the additional constraint (32); thus, constraint (32) can be satisfied for the polytope system (28). According to Theorem 1, we can summarize the corollary as follows.
Corollary 1. Considering the polytopic model (24), if there exists, K(σi), a positive definite matrix, P(σi), satisfying the constraint (30) for all σi ∈ Θ0, i = 1, 2, …, 2n, the gain scheduled controller in the form of (27) can guarantee the affine quadratic stability of the close-loop system for all σ ∈ Θ.
Therefore, if the constraint (30) is satisfied for the polytopic model, the gain scheduled controller, K(σ), at any point inside the rectangular convex hull can be decided by (22), (23), and (37).
4.3. LQR State Feedback Control Design with Input Saturation
The LQR technique is applicable to linear time invariant (LTI) systems and has been applied in various aircraft models for stabilization augmentation and trajectory tracking [
29]. A properly designed LQR controller can not only guarantee the stability of a closed loop system, but also provides optimal control performance [
15]. Therefore, LQR state feedback is appropriate for the LTI system of the vertex in
Θ0. In addition, the energy consumption by large-scale sweep morphing can also be reduced with the optimal control law, which is required to minimize the performance index function, defined as:
where
Q and
R are weighting matrices and
Q =
QT ≥ 0,
R =
RT> 0. The corresponding full state feedback controller is given by:
Selecting appropriate
Q,
R, and solving the Riccati equation;
where
P =
PT > 0. The optimal control gain matrix can be obtained as:
The Lyapunov function
V(
x,
σi) =
xTPx is considered because
P is a symmetric positive definite matrix, so:
Combining (15) and (34)–(36), the time derivative of the function
V(
x,
σi) can be evaluated as:
As
Q ≥ 0,
R > 0, we can assume that:
Obviously, if and only if x = 0, then . Thus, , and according to the Lyapunov theory, the LQR controller can guarantee the LTI model to be asymptotic and stable.
However, the inputs are restricted by the actuators;
umax is defined as the maximum input and
ujmax is the
jth element of
umax. According to this, the system at each vertex can actually be semi-globally stabilized [
31] by the state feedback law (35) for the prescribed bounded set
Ωi ⊂
Rn;
Ωi is contained in the domain of attraction of the equilibrium state and defined as:
where
kij is the
jth row of the matrix
K(
σi).
Moreover, due to the structural restriction of the morphing MAV, the input is further restricted at the vertex condition so that the control effectiveness will reduce, thereby possibly causing the MAV to become uncontrolled. In this scenario, the closed-loop LTI model system can be rewritten as:
where sat(
u) is the control input with actuator saturation restriction.
Through the aerodynamic characteristics analysis, we can see that the aerodynamic forces vary monotonically with the control inputs
λ1 and
λ2, and the effect of
λ1 and
λ2 are opposite. Furthermore, the input saturation will only restrict the control input in one direction, thus the control torque,
Bsat(
u), is expected to satisfy:
And we assume that:
where
τ(
t) is a time-varying weighting coefficient and 1/2 ≤
τ(
t) ≤ 1.
Then, the time derivative of the function
V(
x,
σi) can be evaluated as:
Due to 2
τ – 1 ≥ 0,
Q ≥ 0 and
R > 0, such that the LMI (40) can still hold. If and only if
x =
0, then V = 0
. Thus,
, and according to the Lyapunov theory, the close-loop system (42) can still be semi-globally stabilized by the state feedback law (35) when
x ∈
Ωi. This implies that the controller,
K(
σi), designed by the LQR technique for each vertex can satisfy constraint (30). Then, according to Corollary 1, the gain scheduled controller,
K(
σ), can guarantee the affine quadratic stability of the close-loop system for the prescribed bounded set,
Ω ⊂
Rn, defined as:
where
kj is the
jth row of the matrix,
K(
σ).
5. Simulation Results and Analysis
In order to verify the performance of the gain scheduled transition controller obtained by the method in
Section 4 with the vertex flight conditions shown in
Table 2, close-loop simulations of the transition process were conducted based on the nonlinear dynamic model. The block diagram of the flight controller structure is shown in
Figure 7. The observer is designed to estimate the system states. In this research, the loitering configuration corresponds to Condition 1, and the dashing configuration corresponds to Condition 4. The following two situations are considered: transition process from the loitering configuration to the dashing configuration, transition process from the dash configuration to the loiter configuration. The effect of morphing rate is also taken into account in the simulation. The airfoils are actuated by four servos housed in the fuselage. Here, we assume that the servos are described as a second order system and can provide the required moments and powers to assert the behavior [
24].
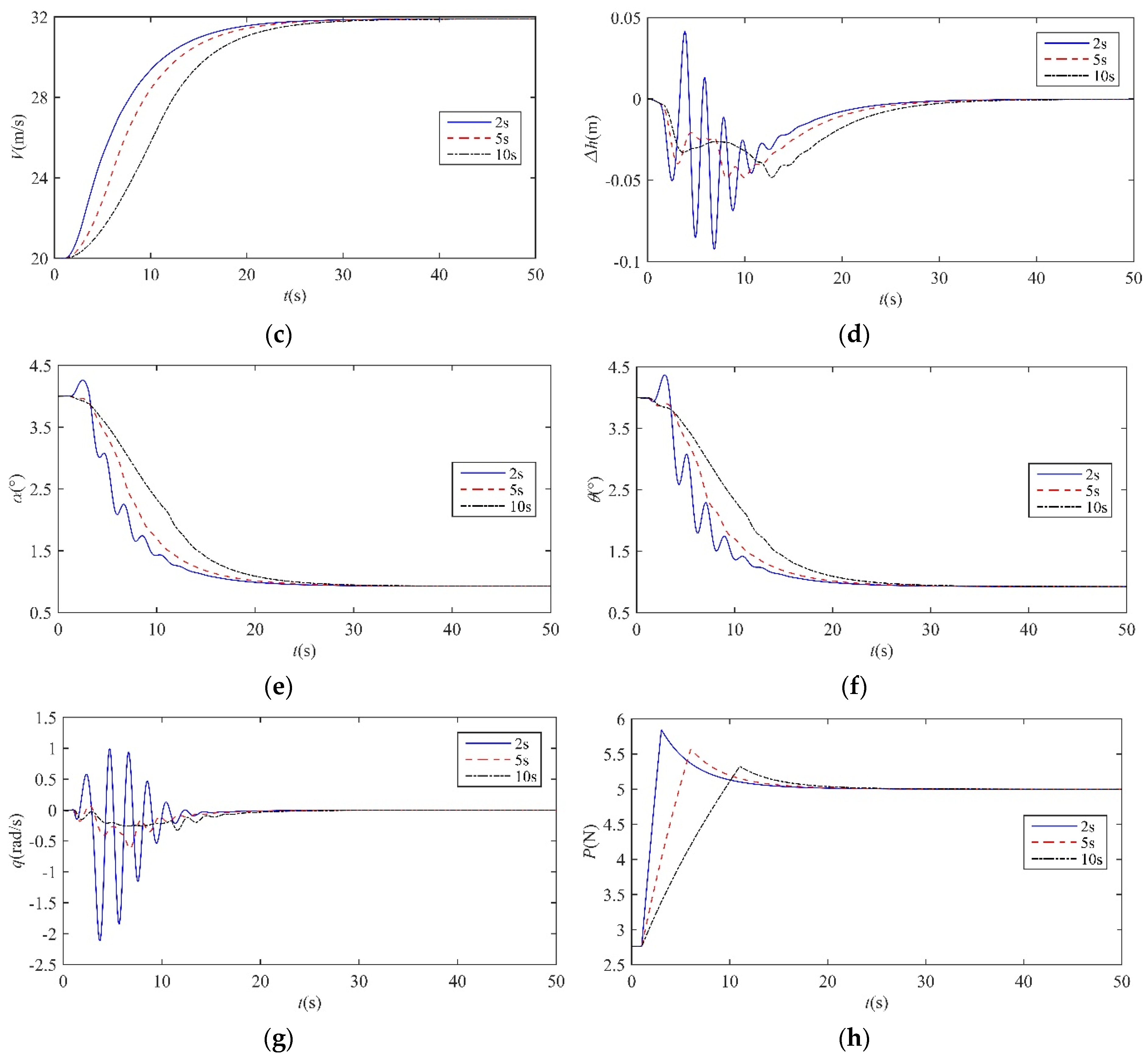
Figure 8 shows the close-loop dynamic responses of the transition process from loitering configuration to dashing configuration within 2 s, 5 s, and 10 s, respectively. The morphing starts with an initial flight velocity of 20 m/s at 1 s. As the morphing occurs, the flight velocity,
V, increases and then converges to 31.9 m/s gradually, which corresponds to Condition 4 after the morphing finishes. Furthermore, the attack angle,
α, and pitch angle,
θ, are also convergent to the new equilibrium state. During the whole transition process, the variation range of altitude,
h, is less than 0.1 m, and
h eventually retains the initial height. In addition, it is worth noting that the close-loop system with the three different morphing rates are all stable during the transition process, and the faster morphing rate would result in a faster convergence rate as well as a larger oscillation amplitude of the state parameters. After the morphing command finishes, the sweep input,
λ2, remains almost constant due to the actuator saturation restriction, while the
λ1 and thrust,
P, would continue to adjust until achieving a new balance. Moreover,
λ1 and thrust,
P, both vary within acceptable ranges for the different morphing rates, which demonstrates that the gain scheduled controller can realize the transition control objective for situation 1.
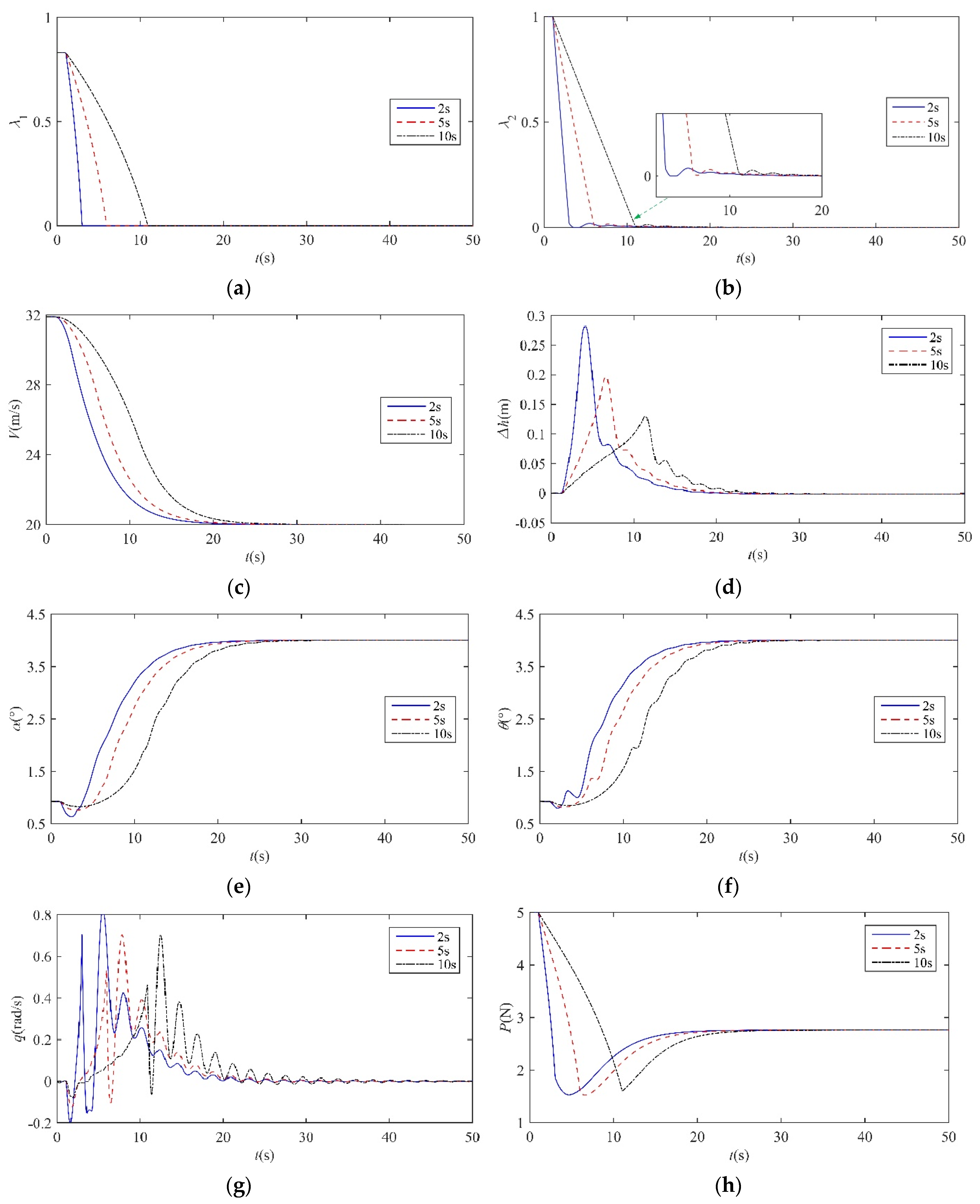
Figure 9 shows the close-loop dynamic responses of the transition process from dashing configuration to loitering configuration, the corresponding flight state transforming from high speed to low speed, and the simulation was conducted with the three different morphing rates. It is observed that the transition process in situation 2 is stable. As morphing occurs, the flight velocity, V, gradually decreases from 31.9 m/s to 20 m/s, with the thrust decreasing, and all the longitudinal motion parameters finally converge to the equilibrium state of flight condition 1. Similarly, the convergence rate is faster and the oscillation amplitude of α, θ, and pitch angular velocity, q, are larger with a faster morphing rate. Furthermore, the variation range of altitude, h, is below 0.3 m and is smaller with lower morphing rates. Furthermore, q varies more placidly than that in situation 1, which demonstrates that guaranteeing the transition process stability from loitering configuration to dashing configuration faces much more challenges. Due to the placid motions, it is easy to achieve a new balanced state with only minor adjustments of the sweep control inputs. In consequence, the gain scheduled controller based on the LPV model can eliminate the disturbance caused by sweep morphing and guarantee the stability of the transition process in these two situations.
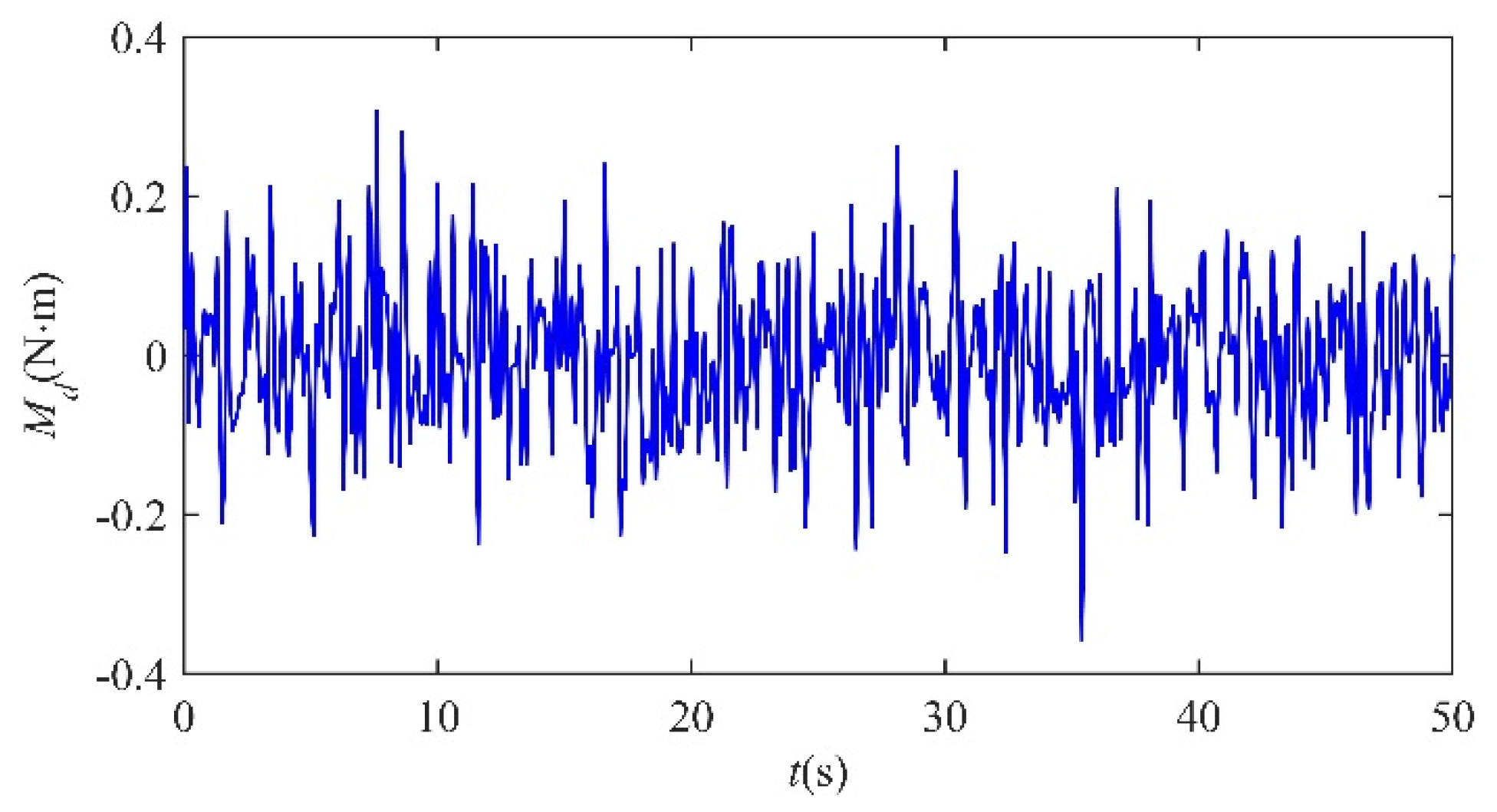
As we know, unpredictable atmosphere disturbance and unmodeled dynamics exist in nearly all aircraft systems, and it is almost impossible to describe them precisely using mathematical models. Therefore, the gain scheduled controller needs to be sufficiently robust against the dynamic effects. In the following described simulations, the Gaussian white noise shown in
Figure 10 is added in the pitch moment as an interference signal to verify the robustness.
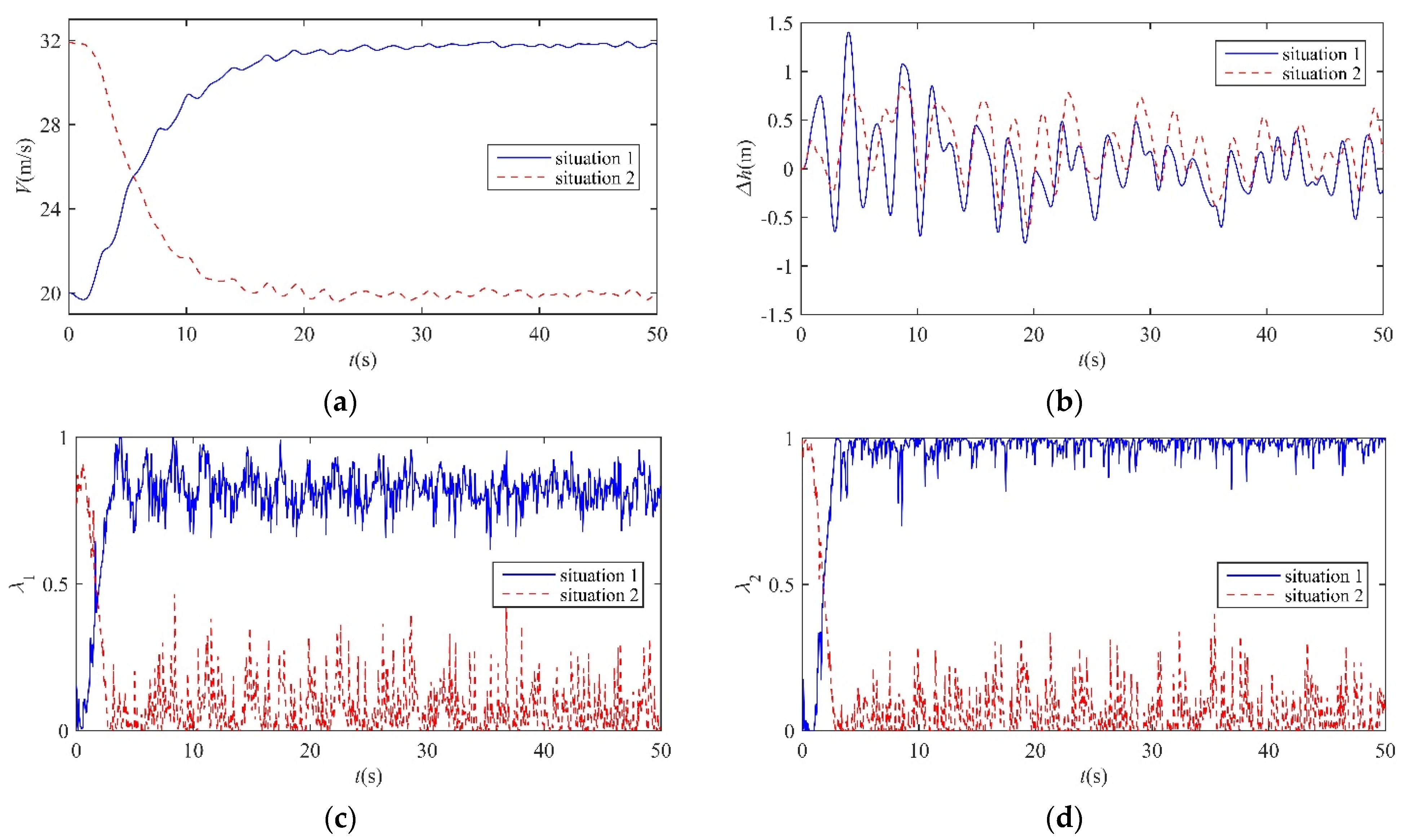
Figure 11 shows the close-loop dynamic responses of the transition process in the two situations under the white noise condition. The flight velocity,
V, and altitude,
h, present small amplitude fluctuations under the effect of disturbance moment, while the morphing proceeds as usual without any trend of divergence. With the successive adjustments of sweep control inputs
λ1 and
λ2, the difference values of
V and
h between the equilibrium states are less than 0.2 m/s and 1.5 m, respectively. The simulation results demonstrate that the designed gain scheduled transition controller has strong robustness for random disturbance.
6. Conclusions
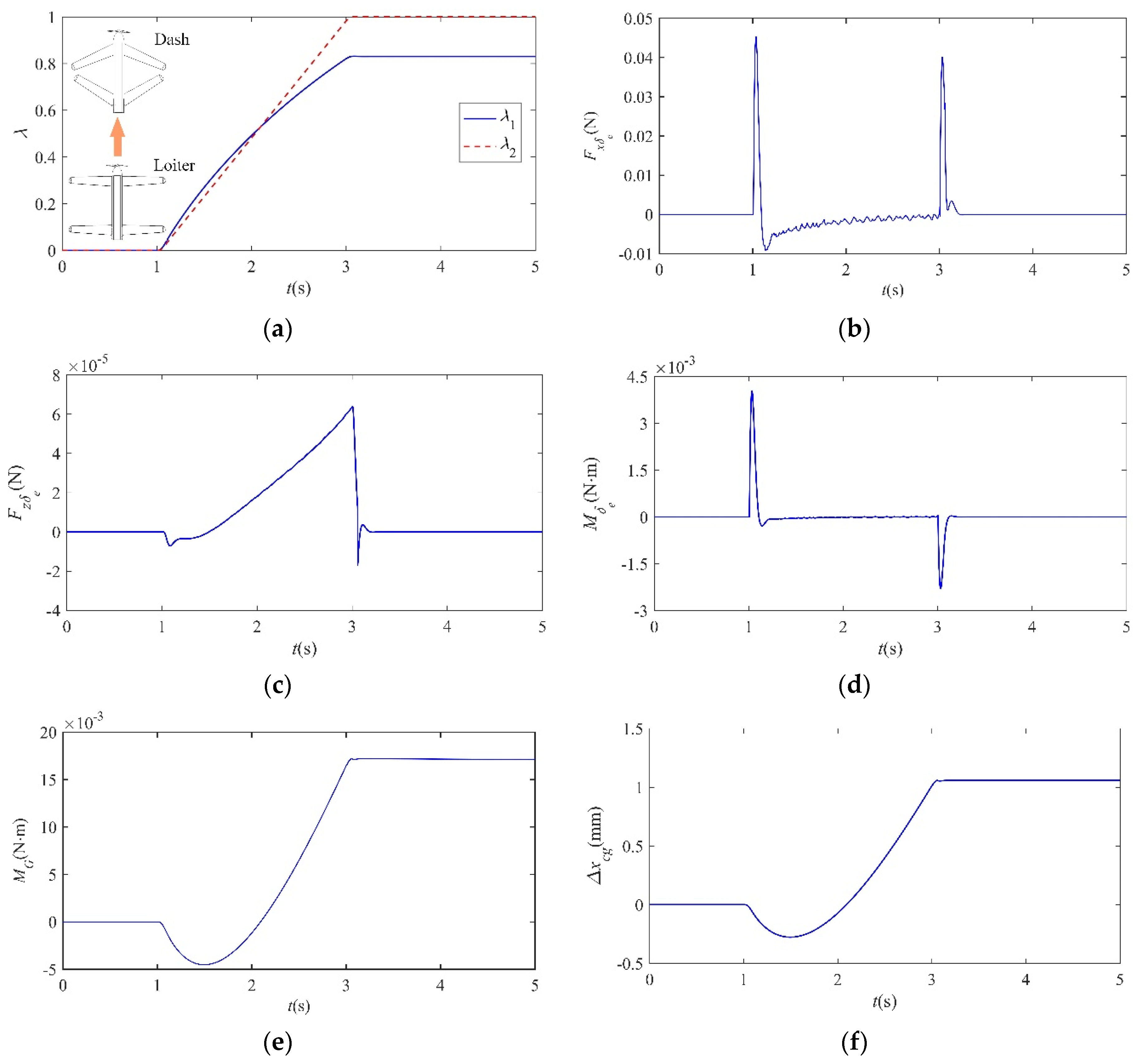
In this paper, an innovative variable sweep scheme was applied to a tandem-wing MAV of which the shape control and flight control are integrated, and multitask adaptability could be achieved by symmetric sweep morphing to alter the configuration of the considered MAV without elevator changes. For the large-scale morphing MAV, the aerodynamic effects caused by sweep morphing were presented through a numerical simulation method and functionalized with the sweep inputs. A nonlinear longitudinal dynamic model for the considered MAV was then proposed, and the additional terms generated by morphing were decomposed and simulated by open-loop dynamic response. The results showed that the additional forces and moments and the changes of gravity center caused by the mode transition process were negligibly small. The LPV model was obtained by the Jacobian linearization approach to approximately characterize the complex behavior of the transition process. The stability analysis based on the LPV model showed that the MAV was not always stable under different equilibrium conditions, as well as during the transition process. Furthermore, the LPV model was converted to a polytopic model, and the average value of mismatching error between the LPV model and the polytopic model was about 2.9%. Based on the polytopic model, a gain scheduled controller was proposed to guarantee the affine quadratic stability of the close-loop model during the morphing process, and the LQR method was used to guarantee asymptotic stability and improve the robustness at the arbitrary frozen equilibrium condition. Furthermore, the Lyapunov function proved that the controller could still satisfy the asymptotic stability with the consideration of input saturation. Finally, the results of simulation based on the nonlinear model demonstrated that the proposed controller exhibits great performance during the transition process between the loitering configuration and dash configuration. In addition, the simulation under the effect of disturbance moment illustrated that the designed gain scheduled transition controller had strong robustness against random white noise.
In our future works, we will pay attention to adaptive sliding mode control for attitude control; the morphing MAV’s dynamic model representation will be further optimized to improve control precision, and flight tests will also be carried out.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}