
Adapt or Perish? Exploring the Effectiveness of Adaptive DoF Control Interaction Methods for Assistive Robot Arms

 , ,
, ,  , ,
, ,  and
and
Abstract
:1. Introduction
2. Related Work
3. Control Types for a 3D Environment
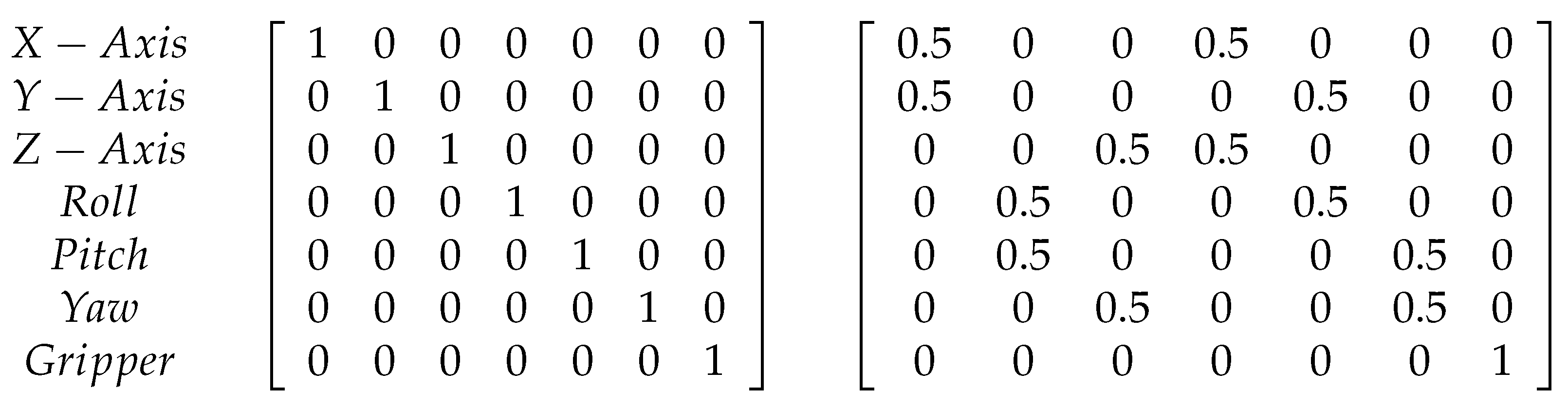
3.1. Manually Designed DoF-Calculations
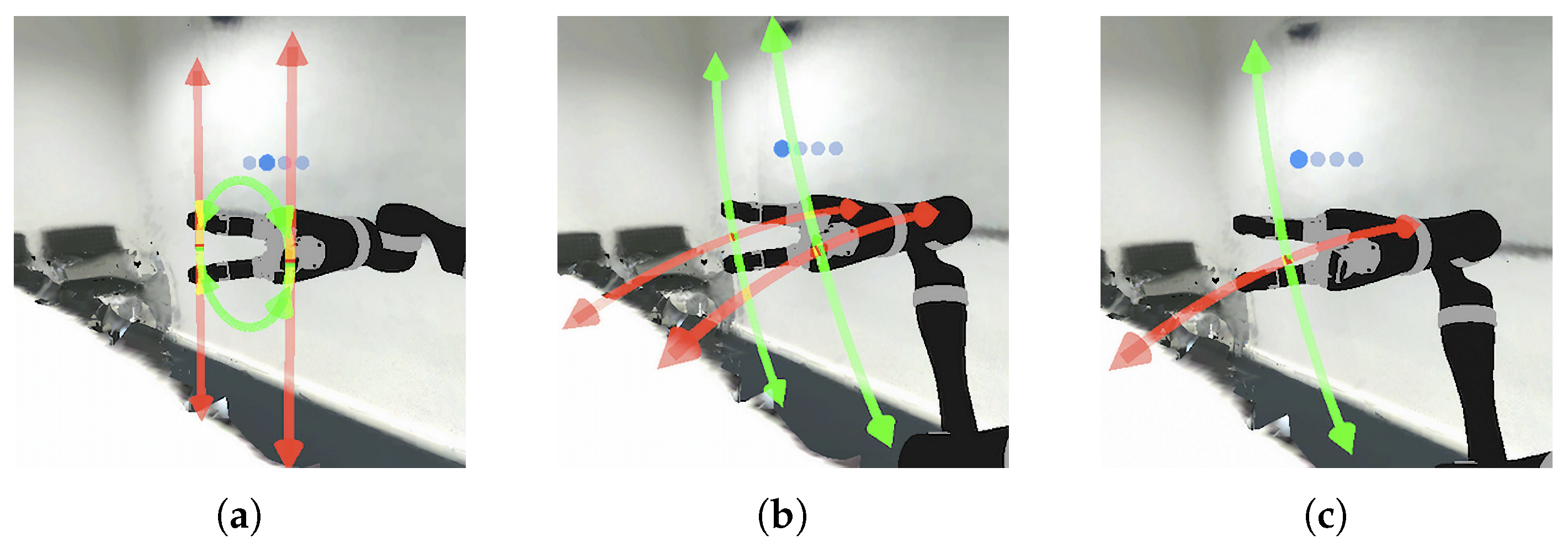
3.2. Classic Control Type
- X-Translation + Y-Translation;
- Z-Translation + Roll;
- Yaw + Pitch;
- Open/Close fingers + Nothing.
3.3. Double Arrow Control Type
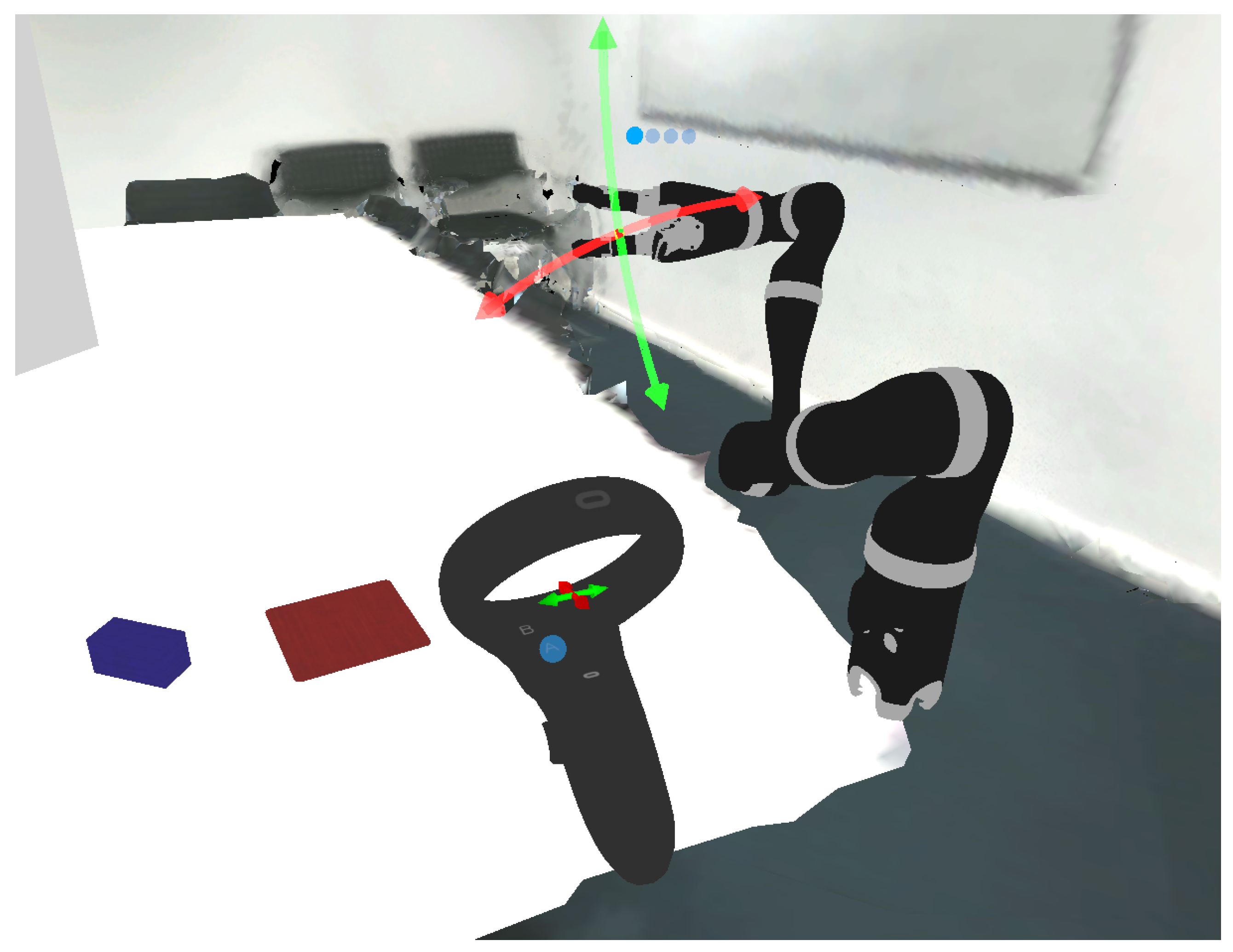
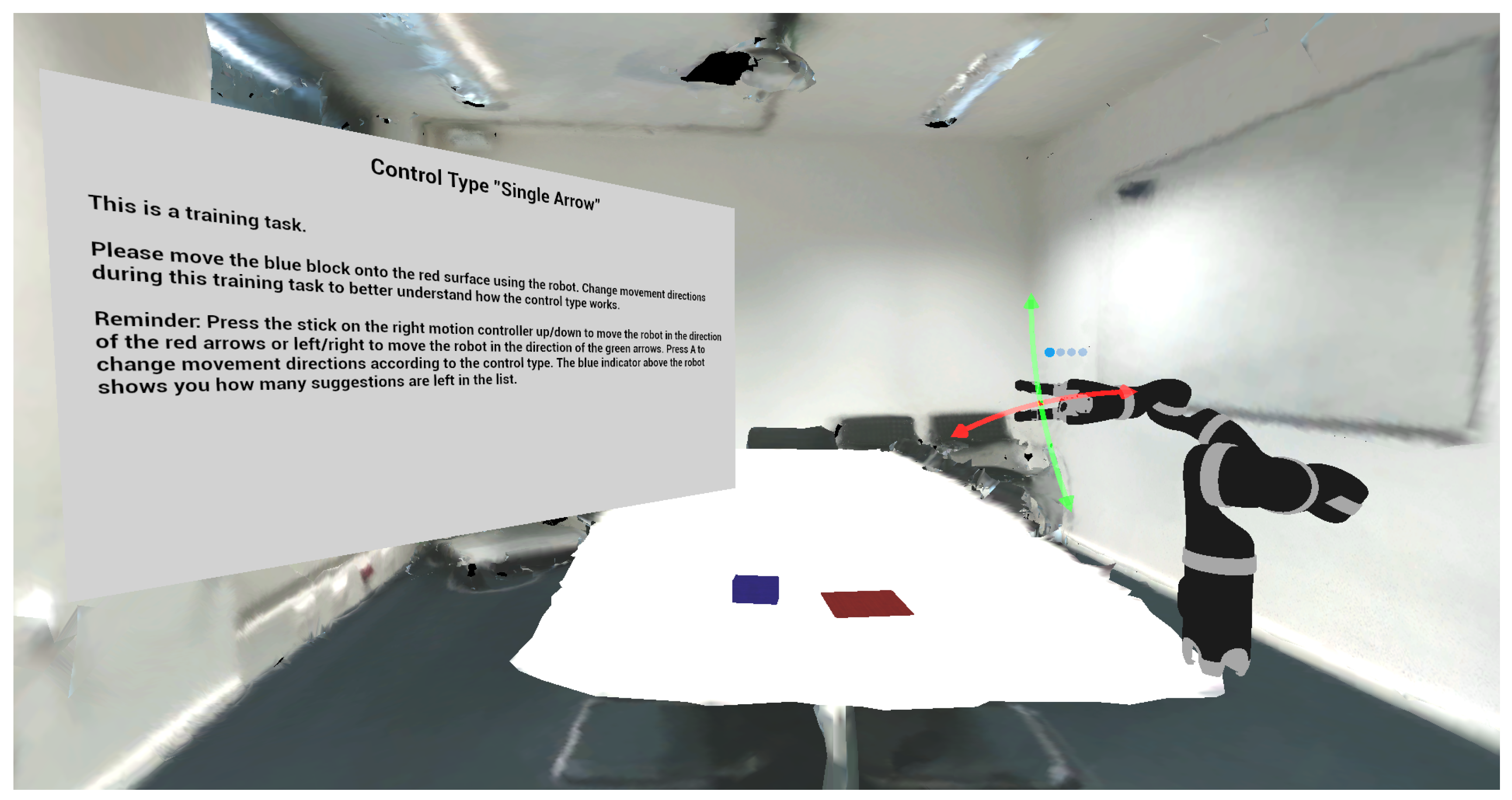
3.4. Control Type Single Arrow
4. Materials and Methods
4.1. Hypotheses
- Average Task Completion Time
- –
- H1 Double Arrow leads to lower task completion time than Classic. The adaptive control of Double Arrow should significantly reduce the movements necessary to perform the task by combining different cardinal DoFs into one continuous movement, which otherwise would each have to be adjusted separately.
- –
- H2 Single Arrow leads to lower task completion time than Double Arrow. Only using one arrow for each DoF mapping should reduce visual clutter. This should lead to a shorter processing time of the suggested movements, reducing the total time to execute a task.
- Average Number of Mode Switches
- –
- H3 Double Arrow leads to fewer mode switches than Classic. The adaptive control of Double Arrow should reduce the necessity to switch modes significantly. Since different DoFs are combined depending on the current situation, a change in position and rotation brings the robot arm closer to the target and can be performed without mode switches.
- –
- H4 Single Arrow and Double Arrow need roughly an equal number of mode switches. The behavior of the two adaptive control types is the same. Thus, while it might take participants longer to understand what movements they can perform with Double Arrow as opposed to Single Arrow, they should switch modes approximately as often in both control types.
- Workload
- –
- H5 Double Arrow leads to lower NASA TLX scores than Classic. The adaptive control of Double Arrow calculates sensible movements to reach the next goal position and rotation. Thus, it should alleviate the participants from having to think of a sequence of movements to reach their goal, reducing workload. This is in contrast to the findings of our previous study, in which participants perceived the Adaptive control as more complex than the Standard control [6]. We expect the benefit of pre-calculated DoF combinations and the workload of developing a sequence of movements in cardinal DoFs to be higher in a 3D environment than in a 2D environment. Therefore, the workload for the adaptive control types should be lower than for Classic in 3D.
- –
- H6 Single Arrow leads to lower NASA TLX scores than Double Arrow. Since we assume that reduced visual clutter leads to a shorter processing time for the suggested movements, the NASA TLX scores of Single Arrow should be lower.
4.2. Participants
4.3. Apparatus
4.4. Procedure
4.5. Study Design
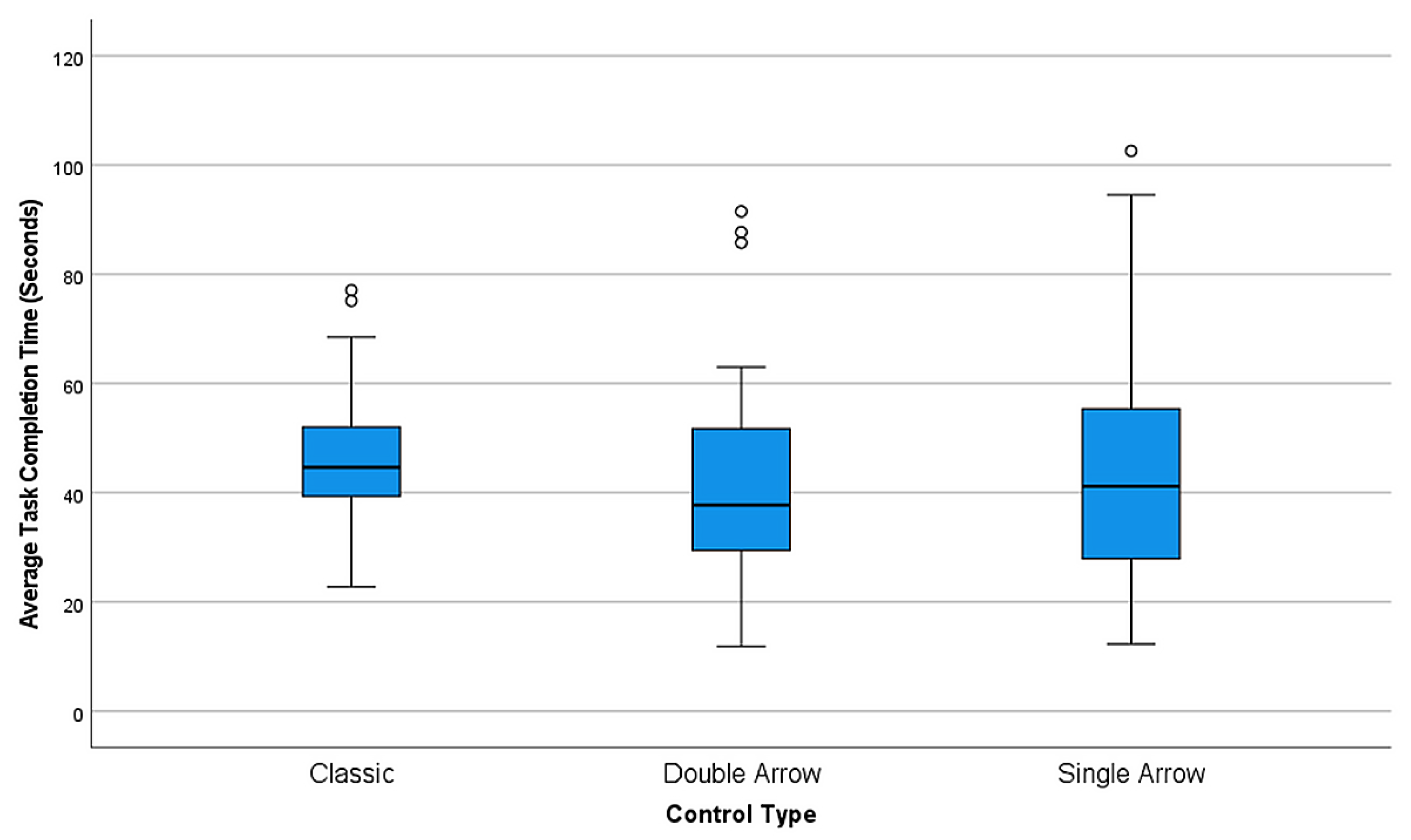
- Average Task Completion Time in seconds While participants executed each trial with the robot arm, the time to complete the task was measured for each participant. Then, the average task completion time for each control type was calculated across all participants.
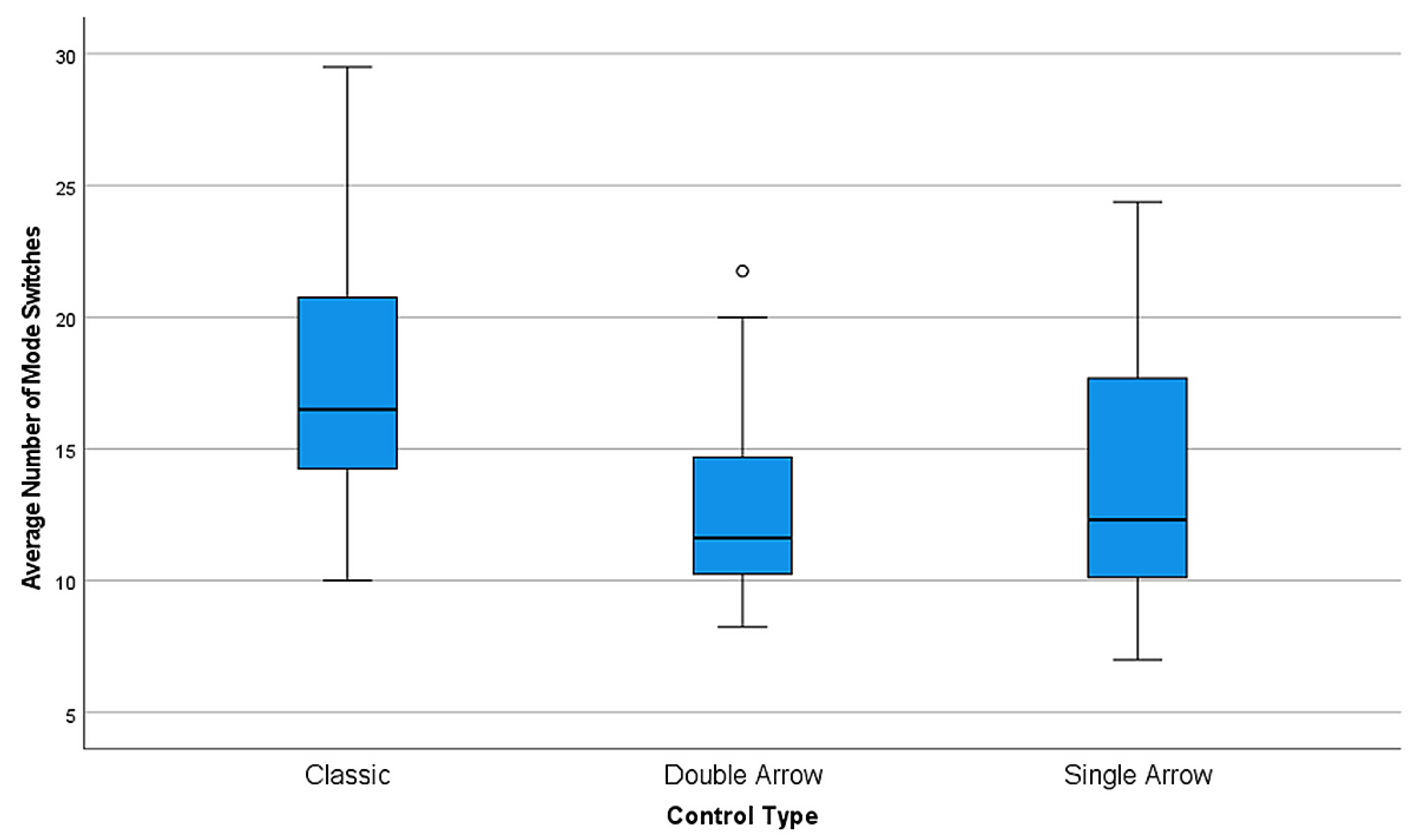
- Average Number of Mode Switches While participants executed each trial with the robot arm, each mode switch executed by pressing a button on the input device was counted and stored as the number of mode switches. Then, the average number of mode switches for each control type was calculated across all participants.
- Workload via a NASA Raw-TLX questionnaire After completing all trials within each control type, the participants were asked to fill out a NASA Raw-TLX questionnaire to obtain information about the participants’ perceived workload. The questionnaire consists of the following six criteria, which participants would rate on a scale of 0 to 100 in steps of 5: mental demand, physical demand, temporal demand, performance, effort, and frustration [28].
4.6. Task
5. Results
5.1. Quantitative Results
- IQR: Interquartile Range;
- SD: Standard Deviation;
- SE: Standard Error;
- p: p-value as an expression of the level of statistical significance;
- N: Sample Size;
- (2): Chi-Squared with two degrees of freedom;
- F: F-Statistic for the Repeated-Measures ANOVA;
- M: Mean;
- df: Degrees of Freedom for the calculation of for the Friedman Tests.
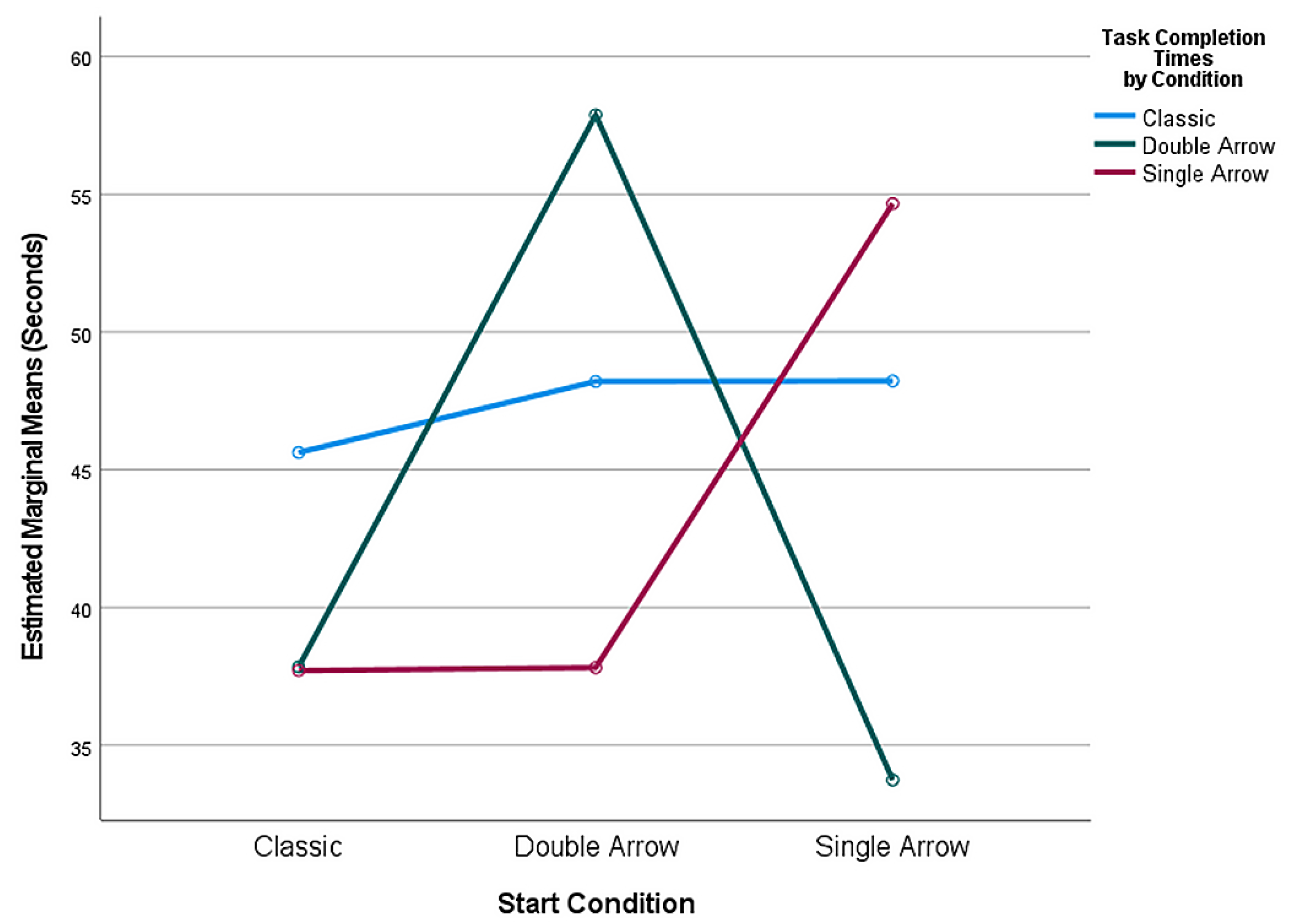
5.1.1. Task Completion Time
5.1.2. Mode Switches
5.1.3. Workload and Rank
5.2. Qualitative Results
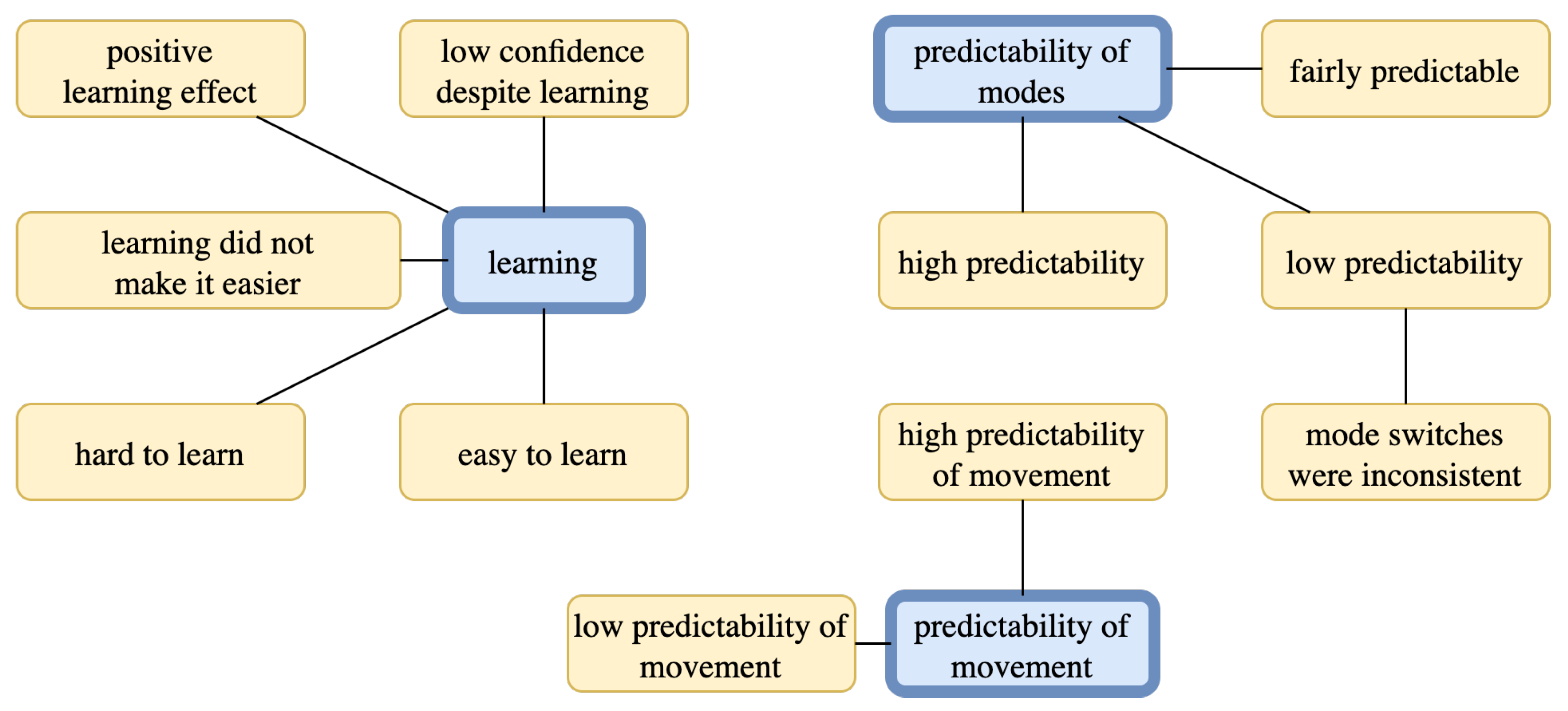
5.2.1. Thematic Analysis
5.2.2. Results of the Thematic Analysis
6. Discussion
7. Limitations
8. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bauer, A.; Wollherr, D.; Buss, M. Human—Robot Collaboration: A Survey. Int. J. Hum. Robot. 2008, 5, 47–66. [Google Scholar] [CrossRef]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef] [Green Version]
- Statistisches Bundesamt (Destatis). Pflegestatistik—Pflege im Rahmen der Pflegeversicherung—Deutschlandergebnisse—2019. 2020. Available online: https://www.destatis.de/DE/Themen/Gesellschaft-Umwelt/Gesundheit/Pflege/Publikationen/Downloads-Pflege/pflege-deutschlandergebnisse-5224001199004.pdf (accessed on 3 January 2022).
- Pascher, M.; Baumeister, A.; Schneegass, S.; Klein, B.; Gerken, J. Recommendations for the Development of a Robotic Drinking and Eating Aid—An Ethnographic Study. In Proceedings of the Human-Computer Interaction—INTERACT 2021, Bari, Italy, 30 August–3 September 2021; Ardito, C., Lanzilotti, R., Malizia, A., Petrie, H., Piccinno, A., Desolda, G., Inkpen, K., Eds.; Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Herlant, L.V.; Holladay, R.M.; Srinivasa, S.S. Assistive Teleoperation of Robot Arms via Automatic Time-Optimal Mode Switching. In Proceedings of the Eleventh ACM/IEEE International Conference on Human Robot Interaction, Christchurch, New Zealand, 7–10 March 2016; pp. 35–42. [Google Scholar]
- Goldau, F.F.; Frese, U. Learning to Map Degrees of Freedom for Assistive User Control: Towards an Adaptive DoF-Mapping Control for Assistive Robots. In Proceedings of the 14th PErvasive Technologies Related to Assistive Environments Conference, Corfu, Greece, 29 June–2 July 2021; Association for Computing Machinery: New York, NY, USA, 2021. PETRA 2021. pp. 132–139. [Google Scholar] [CrossRef]
- Gräser, A.; Heyer, T.; Fotoohi, L.; Lange, U.; Kampe, H.; Enjarini, B.; Heyer, S.; Fragkopoulos, C.; Ristic-Durrant, D. A Supportive FRIEND at Work: Robotic Workplace Assistance for the Disabled. IEEE Robot. Autom. Mag. 2013, 20, 148–159. [Google Scholar] [CrossRef]
- Foresi, G.; Freddi, A.; Monteriù, A.; Ortenzi, D.; Pagnotta, D.P. Improving mobility and autonomy of disabled users via cooperation of assistive robots. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 2–14 January 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Tsui, K.M.; Kim, D.J.; Behal, A.; Kontak, D.; Yanco, H.A. “I want that”: Human-in-the-loop control of a wheelchair-mounted robotic arm. Appl. Bionics Biomech. 2011, 8, 127–147. [Google Scholar] [CrossRef] [Green Version]
- Goldau, F.F.; Shastha, T.K.; Kyrarini, M.; Gräser, A. Autonomous multi-sensory robotic assistant for a drinking task. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 210–216. [Google Scholar]
- Tanaka, K.; Mu, S.; Nakashima, S. Meal-assistance robot using ultrasonic motor with eye interface. Int. J. Autom. Technol. 2014, 8, 186–192. [Google Scholar] [CrossRef]
- McColl, D.; Louie, W.Y.G.; Nejat, G. Brian 2.1: A socially assistive robot for the elderly and cognitively impaired. IEEE Robot. Autom. Mag. 2013, 20, 74–83. [Google Scholar] [CrossRef]
- Guerreiro, J.; Sato, D.; Asakawa, S.; Dong, H.; Kitani, K.M.; Asakawa, C. Cabot: Designing and evaluating an autonomous navigation robot for blind people. In Proceedings of the 21st International ACM SIGACCESS Conference on Computers and Accessibility, Pittsburgh, PA, USA, 28–30 October 2019; pp. 68–82. [Google Scholar]
- Maheu, V.; Archambault, P.S.; Frappier, J.; Routhier, F. Evaluation of the JACO robotic arm: Clinico-economic study for powered wheelchair users with upper-extremity disabilities. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–5. [Google Scholar]
- Hashimoto, K.; Saito, F.; Yamamoto, T.; Ikeda, K. A field study of the human support robot in the home environment. In Proceedings of the 2013 IEEE Workshop on Advanced Robotics and its Social Impacts, Tokyo, Japan, 7–9 November 2013; pp. 143–150. [Google Scholar]
- Fattal, C.; Leynaert, V.; Laffont, I.; Baillet, A.; Enjalbert, M.; Leroux, C. Sam, an assistive robotic device dedicated to helping persons with quadriplegia: Usability study. Int. J. Soc. Robot. 2019, 11, 89–103. [Google Scholar] [CrossRef]
- Kyrarini, M.; Lygerakis, F.; Rajavenkatanarayanan, A.; Sevastopoulos, C.; Nambiappan, H.R.; Chaitanya, K.K.; Babu, A.R.; Mathew, J.; Makedon, F. A survey of robots in healthcare. Technologies 2021, 9, 8. [Google Scholar] [CrossRef]
- Canal, G.; Alenyà, G.; Torras, C. Personalization framework for adaptive robotic feeding assistance. In Proceedings of the International Conference on Social Robotics, Kansas City, MO, USA, 1–3 November 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 22–31. [Google Scholar]
- Drolshagen, S.; Pfingsthorn, M.; Gliesche, P.; Hein, A. Acceptance of industrial collaborative robots by people with disabilities in sheltered workshops. Front. Robot. AI 2021, 7, 541741. [Google Scholar] [CrossRef] [PubMed]
- Pascher, M.; Baumeister, A.; Klein, B.; Schneegass, S.; Gerken, J. Little Helper: A Multi-Robot System in Home Health Care Environments. In Proceedings of the 2019 International Workshop on Human-Drone Interaction (iHDI) as Part of the ACM Conference on Human Factors in Computing Systems, Glasgow, UK, 5 May 2019. [Google Scholar]
- Pollak, A.; Paliga, M.; Pulopulos, M.M.; Kozusznik, B.; Kozusznik, M.W. Stress in manual and autonomous modes of collaboration with a cobot. Comput. Hum. Behav. 2020, 112, 106469. [Google Scholar] [CrossRef]
- Kim, D.J.; Hazlett-Knudsen, R.; Culver-Godfrey, H.; Rucks, G.; Cunningham, T.; Portee, D.; Bricout, J.; Wang, Z.; Behal, A. How Autonomy Impacts Performance and Satisfaction: Results From a Study With Spinal Cord Injured Subjects Using an Assistive Robot. IEEE Trans. Syst. Man Cybern.—Part A Syst. Hum. 2012, 42, 2–14. [Google Scholar] [CrossRef]
- Cleaver, A.; Tang, D.V.; Chen, V.; Short, E.S.; Sinapov, J. Dynamic Path Visualization for Human-Robot Collaboration. In Proceedings of the Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’21 Companion), Boulder, CO, USA, 8–11 March 2021; Association for Computing Machinery: New York, NY, USA, 2021; pp. 339–343. [Google Scholar] [CrossRef]
- Walker, M.; Hedayati, H.; Lee, J.; Szafir, D. Communicating Robot Motion Intent with Augmented Reality. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’18), Chicago, IL, USA, 5–8 March 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 316–324. [Google Scholar] [CrossRef]
- Shrestha, M.C.; Kobayashi, A.; Onishi, T.; Uno, E.; Yanagawa, H.; Yokoyama, Y.; Kamezaki, M.; Schmitz, A.; Sugano, S. Intent communication in navigation through the use of light and screen indicators. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 523–524. [Google Scholar] [CrossRef]
- Shindev, I.; Sun, Y.; Coovert, M.; Pavlova, J.; Lee, T. Exploration of Intention Expression for Robots. In Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction (HRI ’12), Boston, MA, USA, 5–8 March 2012; Association for Computing Machinery: New York, NY, USA, 2012; pp. 247–248. [Google Scholar] [CrossRef]
- Kim, H.K.; Park, J.; Choi, Y.; Choe, M. Virtual reality sickness questionnaire (VRSQ): Motion sickness measurement index in a virtual reality environment. Appl. Ergon. 2018, 69, 66–73. [Google Scholar] [CrossRef] [PubMed]
- Hart, S.G. Nasa-Task Load Index (NASA-TLX); 20 Years Later. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2006, 50, 904–908. [Google Scholar] [CrossRef] [Green Version]
- Hoaglin, D.C.; Iglewicz, B. Fine-Tuning Some Resistant Rules for Outlier Labeling. J. Am. Stat. Assoc. 1987, 82, 1147–1149. [Google Scholar] [CrossRef]
- Braun, V.; Clarke, V. Using thematic analysis in psychology. Qual. Res. Psychol. 2006, 3, 77–101. [Google Scholar] [CrossRef] [Green Version]
- Park, K.B.; Choi, S.H.; Lee, J.Y.; Ghasemi, Y.; Mohammed, M.; Jeong, H. Hands-free human–robot interaction using multimodal gestures and deep learning in wearable mixed reality. IEEE Access 2021, 9, 55448–55464. [Google Scholar] [CrossRef]
- Kyrarini, M.; Zheng, Q.; Haseeb, M.A.; Gräser, A. Robot learning of assistive manipulation tasks by demonstration via head gesture-based interface. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 1139–1146. [Google Scholar]
- Pascher, M.; Kronhardt, K.; Franzen, T.; Gruenefeld, U.; Schneegass, S.; Gerken, J. My Caregiver the Cobot: Comparing Visualization Techniques to Effectively Communicate Cobot Perception to People with Physical Impairments. Sensors 2022, 22, 755. [Google Scholar] [CrossRef]
- Zhang, F.; Cully, A.; Demiris, Y. Probabilistic real-time user posture tracking for personalized robot-assisted dressing. IEEE Trans. Robot. 2019, 35, 873–888. [Google Scholar] [CrossRef]
- Zlatintsi, A.; Dometios, A.; Kardaris, N.; Rodomagoulakis, I.; Koutras, P.; Papageorgiou, X.; Maragos, P.; Tzafestas, C.S.; Vartholomeos, P.; Hauer, K.; et al. I-Support: A robotic platform of an assistive bathing robot for the elderly population. Robot. Auton. Syst. 2020, 126, 103451. [Google Scholar] [CrossRef]
- Arévalo Arboleda, S.; Pascher, M.; Lakhnati, Y.; Gerken, J. Understanding human-robot collaboration for people with mobility Impairments at the Workplace, a thematic analysis. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; pp. 561–566. [Google Scholar]
- Arévalo Arboleda, S.; Becker, M.; Gerken, J. Does One Size Fit All? A Case Study to Discuss Findings of an Augmented Hands-Free Robot Teleoperation Concept for People with and without Motor Disabilities. Technologies 2022, 10, 4. [Google Scholar] [CrossRef]
- Arévalo Arboleda, S.; Pascher, M.; Baumeister, A.; Klein, B.; Gerken, J. Reflecting upon Participatory Design in Human-Robot Collaboration for People with Motor Disabilities: Challenges and Lessons Learned from Three Multiyear Projects. In Proceedings of the 14th PErvasive Technologies Related to Assistive Environments Conference—PETRA 2021, Corfu, Greece, 29 June 2021–2 July 2021. [Google Scholar] [CrossRef]
- Watanabe, A.; Ikeda, T.; Morales, Y.; Shinozawa, K.; Miyashita, T.; Hagita, N. Communicating robotic navigational intentions. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5763–5769. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classic | Double Arrow | Single Arrow | |
|---|---|---|---|
| Mean | 47.41 | 42.62 | 44.04 |
| Median | 44.66 | 37.75 | 41.23 |
| Std.-Dev. | 12.55 | 19.28 | 22.24 |
| IQR | 14.03 | 24.33 | 31.68 |
| Classic | Double Arrow | Single Arrow | |
|---|---|---|---|
| Mean | 17.87 | 12.93 | 14.23 |
| Median | 16.50 | 11.63 | 12.31 |
| Std.-Dev. | 4.80 | 3.91 | 5.15 |
| IQR | 7.00 | 5.09 | 7.91 |
| Mental | Physical | Temporal | Performance | Effort | Frustration | |
|---|---|---|---|---|---|---|
| Demand | Demand | Demand | ||||
| Classic (Mean) | 53.33 | 30.26 | 36.92 | 32.05 | 48.59 | 41.41 |
| Classic (Std.-Dev.) | 24.64 | 21.67 | 21.07 | 20.48 | 24.84 | 24.52 |
| Double Arrow (Mean) | 56.28 | 28.21 | 40.38 | 38.97 | 52.82 | 43.08 |
| Double Arrow (Std.-Dev.) | 22.93 | 16.20 | 25.06 | 25.50 | 24.08 | 26.40 |
| Single Arrow (Mean) | 48.97 | 27.56 | 36.03 | 40.64 | 51.41 | 38.33 |
| Single Arrow (Std.-Dev.) | 24.69 | 22.94 | 20.56 | 26.61 | 23.25 | 26.34 |
| Mean Ranks | ||||||
| Classic | 2.04 | 1.92 | 1.96 | 1.73 | 1.79 | 1.92 |
| Double Arrow | 2.21 | 2.17 | 2.18 | 2.15 | 2.18 | 2.17 |
| Single Arrow | 1.76 | 1.91 | 1.86 | 2.12 | 2.03 | 1.91 |
| Friedman Tests | ||||||
| 4.23 | 2.07 | 2.38 | 4.86 | 3.15 | 1.76 | |
| Exact Significance | 0.12 | 0.37 | 0.31 | 0.09 | 0.21 | 0.43 |
| NASA TLX | Rank | |
|---|---|---|
| Classic (Mean) | 40.43 | 1.87 |
| Classic (Std.-Dev.) | 17.11 | 0.77 |
| Double Arrow (Mean) | 43.29 | 2.05 |
| Double Arrow (Std.-Dev.) | 15.32 | 0.86 |
| Single Arrow (Mean) | 40.49 | 2.08 |
| Single Arrow (Std.-Dev.) | 17.29 | 0.84 |
| Mean Ranks | ||
| Classic | 1.85 | 1.87 |
| Double Arrow | 2.29 | 2.05 |
| Single Arrow | 1.86 | 2.08 |
| Friedman Tests | ||
| 5.33 | 0.97 | |
| Exact Significance | 0.07 | 0.65 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kronhardt, K.; Rübner, S.; Pascher, M.; Goldau, F.F.; Frese, U.; Gerken, J. Adapt or Perish? Exploring the Effectiveness of Adaptive DoF Control Interaction Methods for Assistive Robot Arms. Technologies 2022, 10, 30. https://doi.org/10.3390/technologies10010030
Kronhardt K, Rübner S, Pascher M, Goldau FF, Frese U, Gerken J. Adapt or Perish? Exploring the Effectiveness of Adaptive DoF Control Interaction Methods for Assistive Robot Arms. Technologies. 2022; 10(1):30. https://doi.org/10.3390/technologies10010030
Chicago/Turabian StyleKronhardt, Kirill, Stephan Rübner, Max Pascher, Felix Ferdinand Goldau, Udo Frese, and Jens Gerken. 2022. "Adapt or Perish? Exploring the Effectiveness of Adaptive DoF Control Interaction Methods for Assistive Robot Arms" Technologies 10, no. 1: 30. https://doi.org/10.3390/technologies10010030
APA StyleKronhardt, K., Rübner, S., Pascher, M., Goldau, F. F., Frese, U., & Gerken, J. (2022). Adapt or Perish? Exploring the Effectiveness of Adaptive DoF Control Interaction Methods for Assistive Robot Arms. Technologies, 10(1), 30. https://doi.org/10.3390/technologies10010030