
An Optimized Enhanced Phase Locked Loop Controller for a Hybrid System

 , ,
, , 
Abstract
:1. Introduction
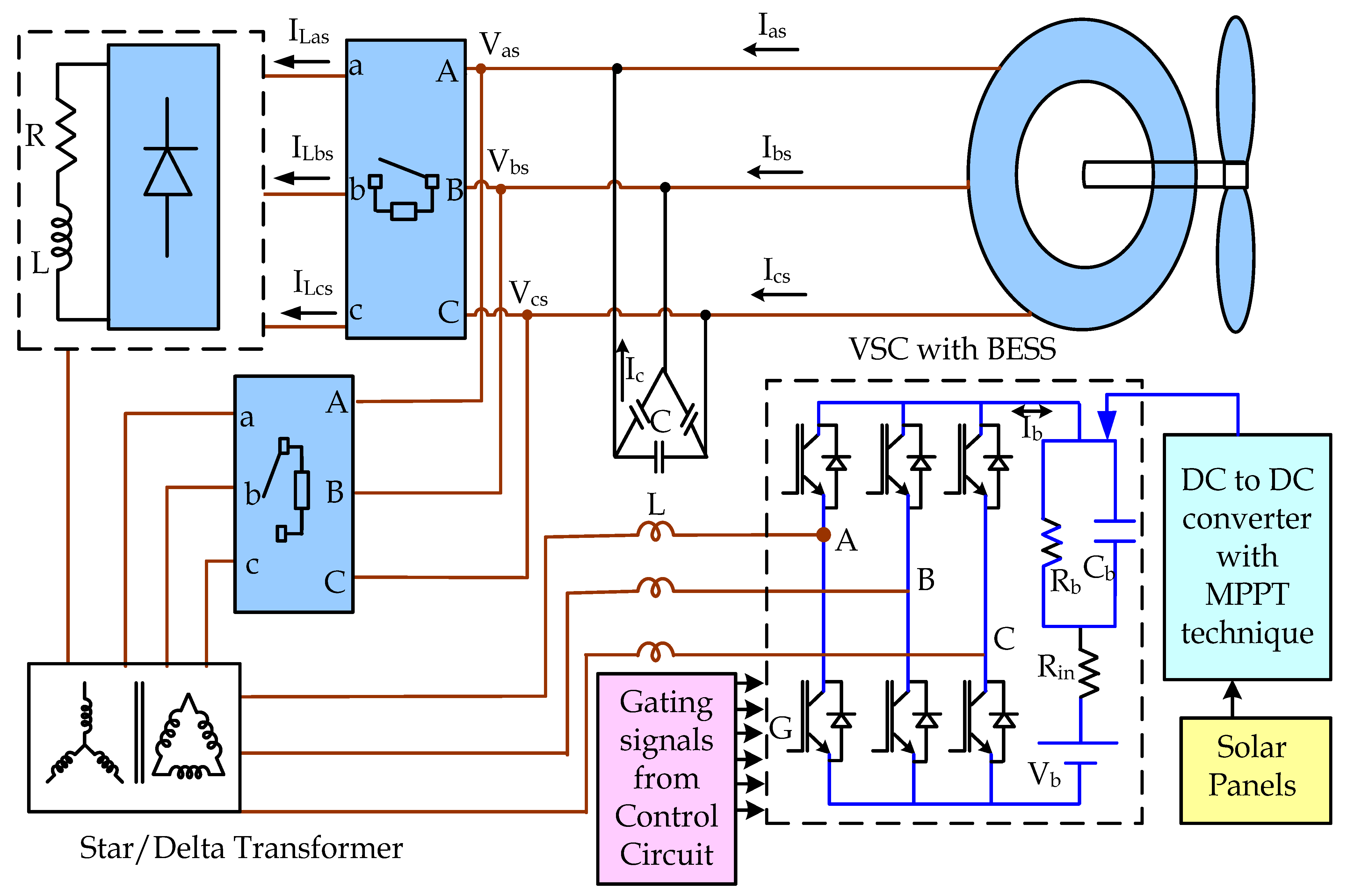
2. System Design
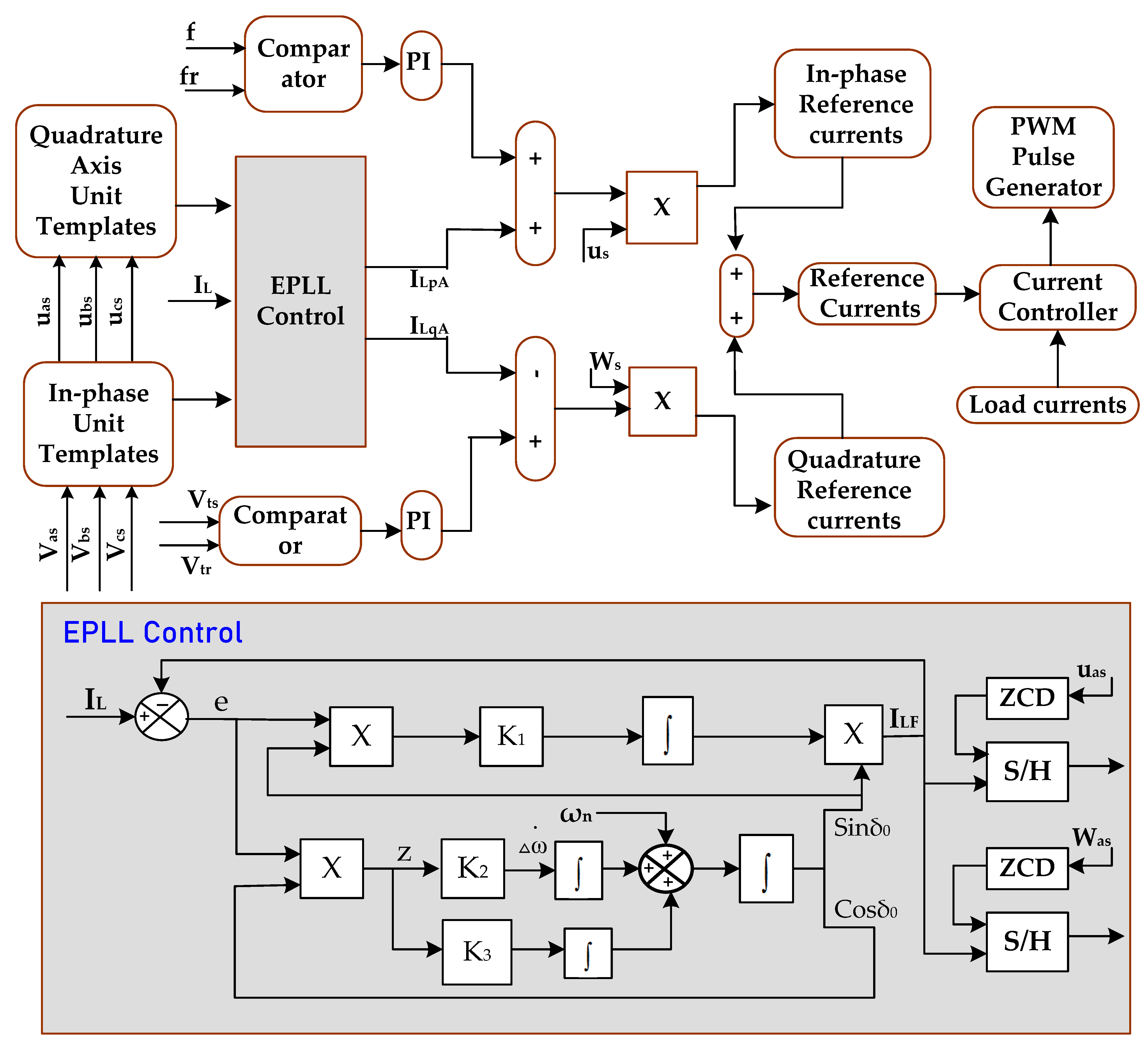
3. Control Algorithm
3.1. Enhanced Phase Locked Loop (EPLL)
3.1.1. Computing In-Phase Reference Currents
3.1.2. Computing Quadrature-Phase Reference Currents
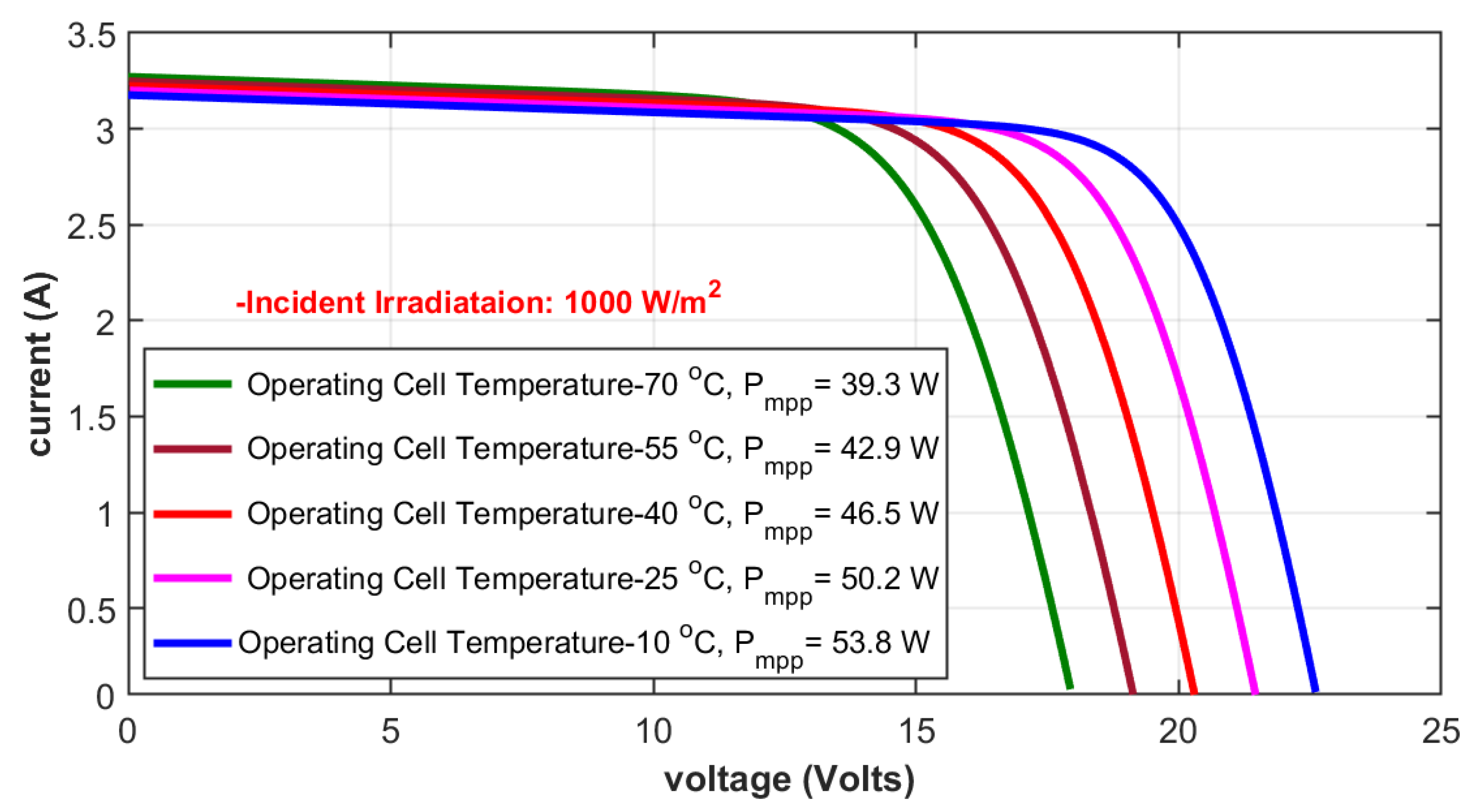
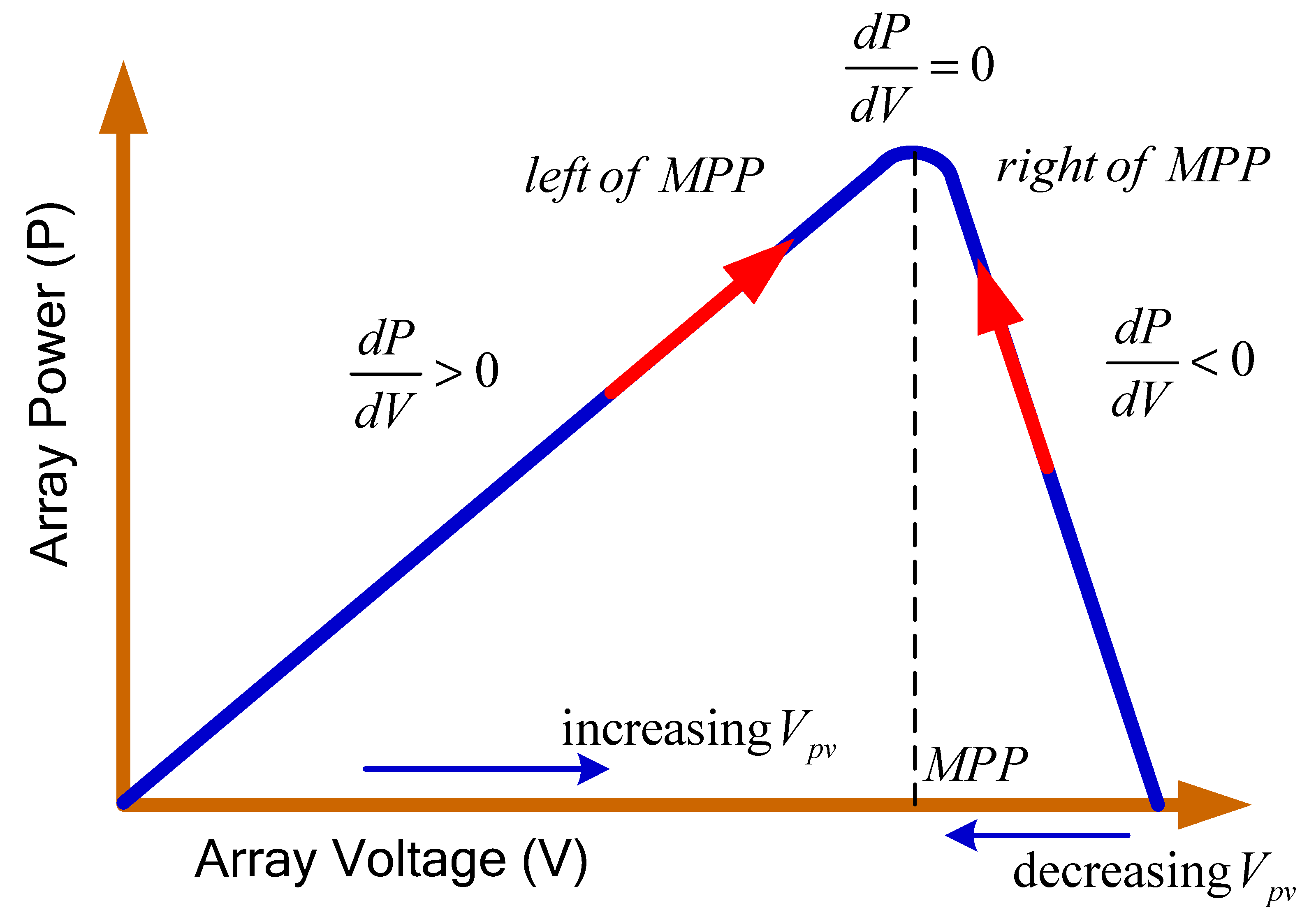
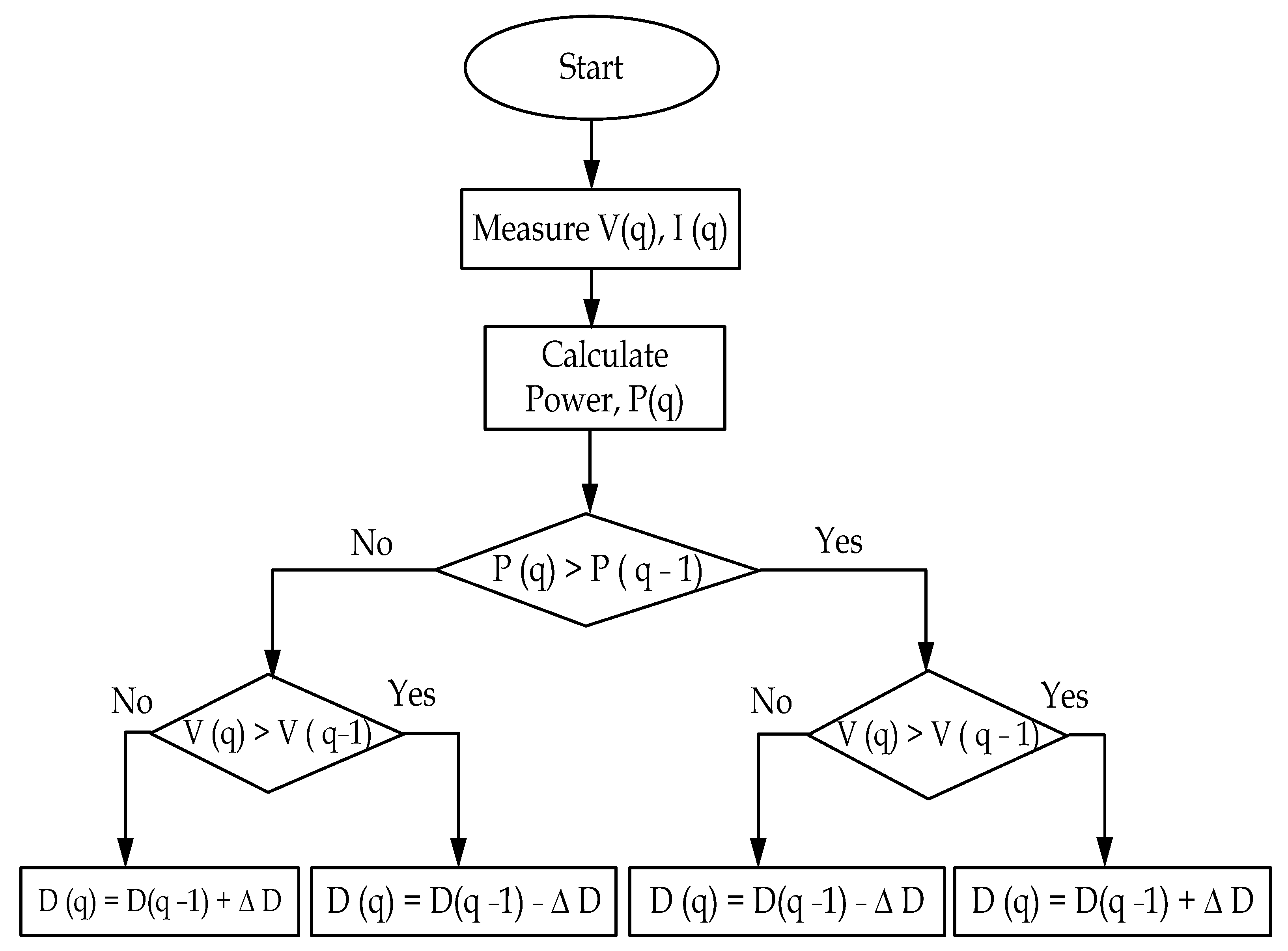
3.2. Perturb and Observe (P&O)
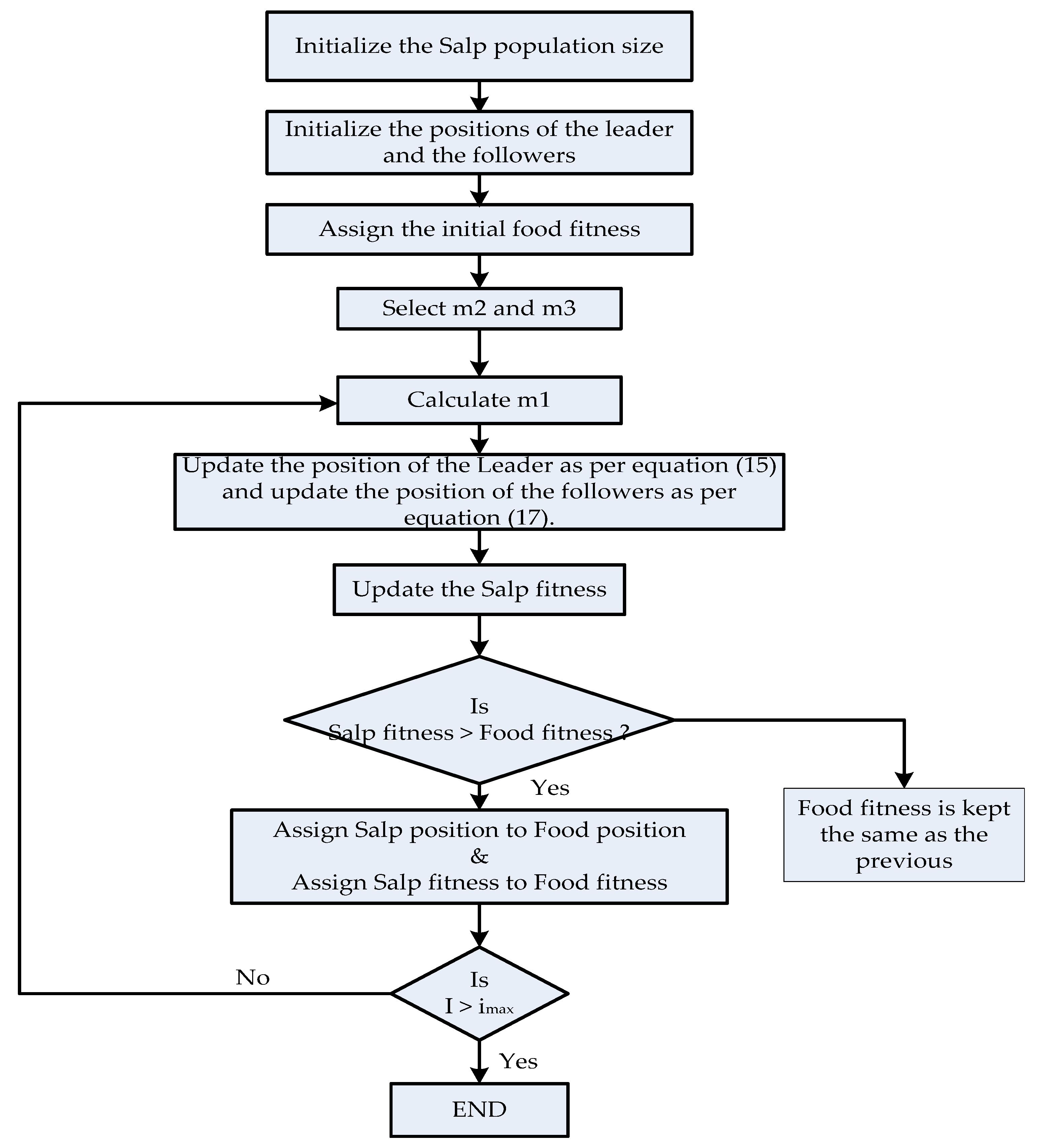
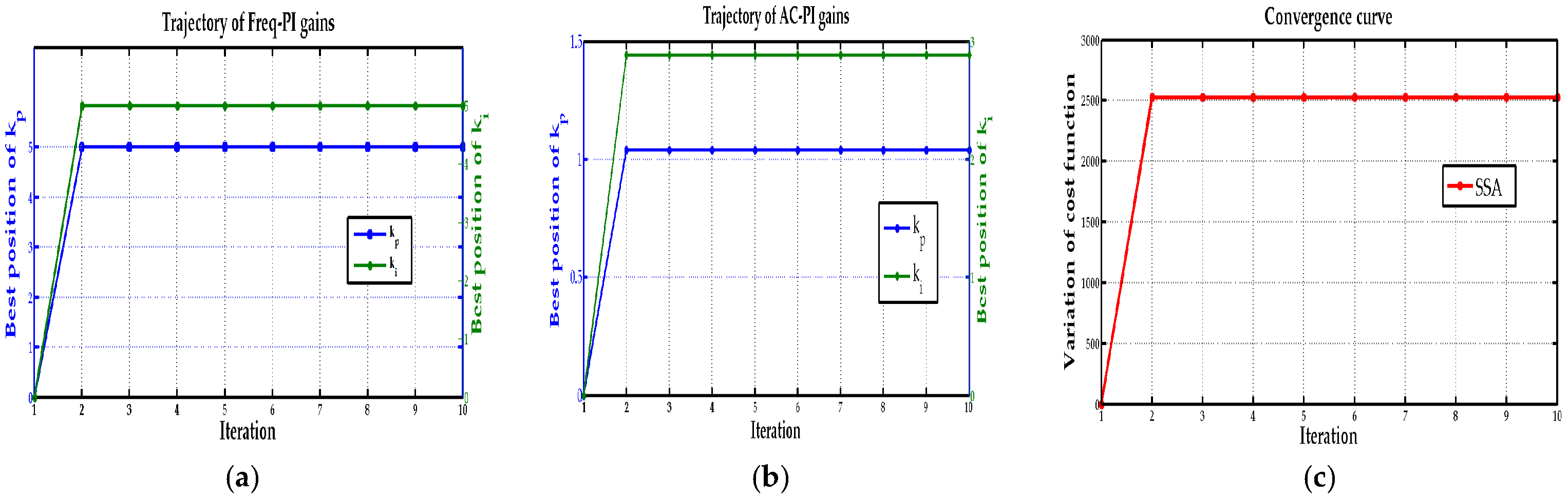
4. Optimization of PI Gains
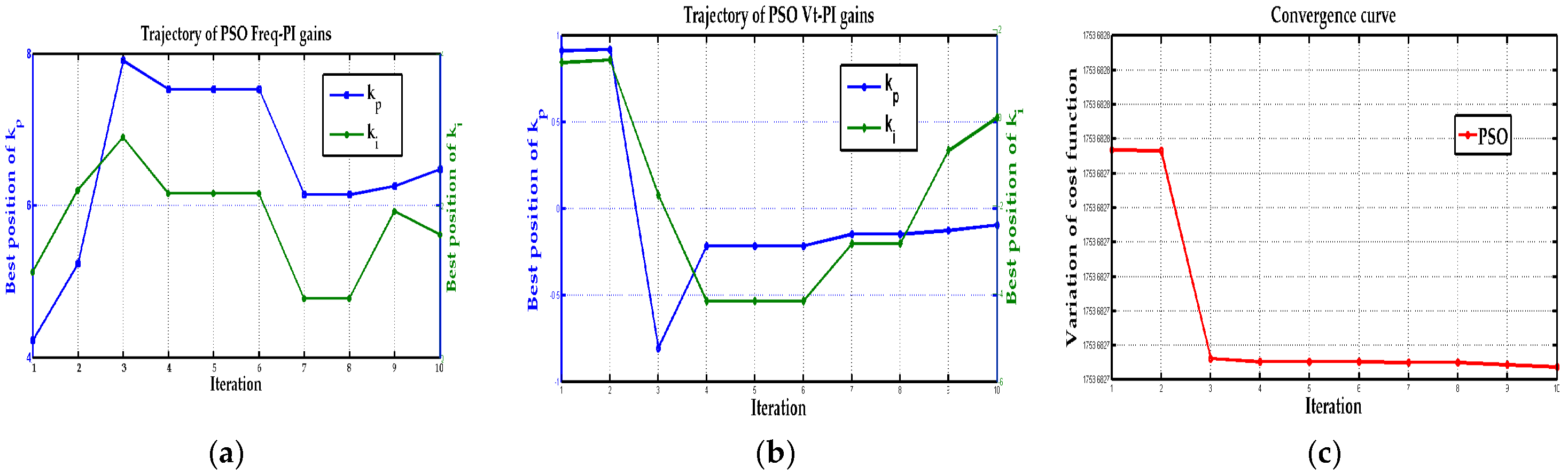
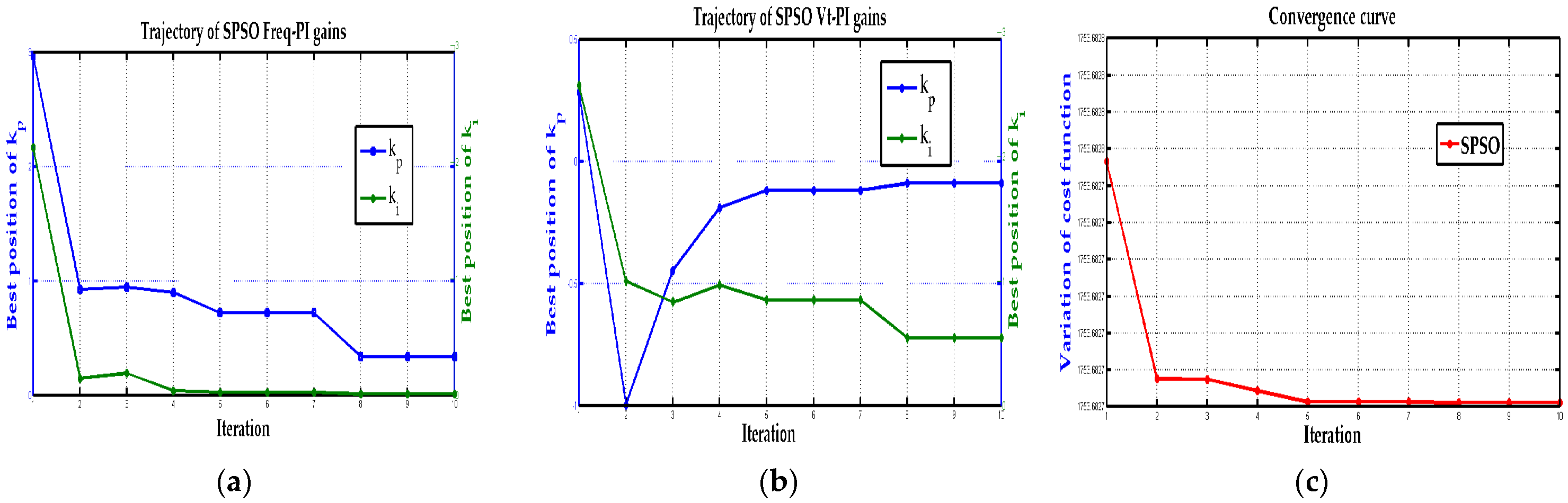
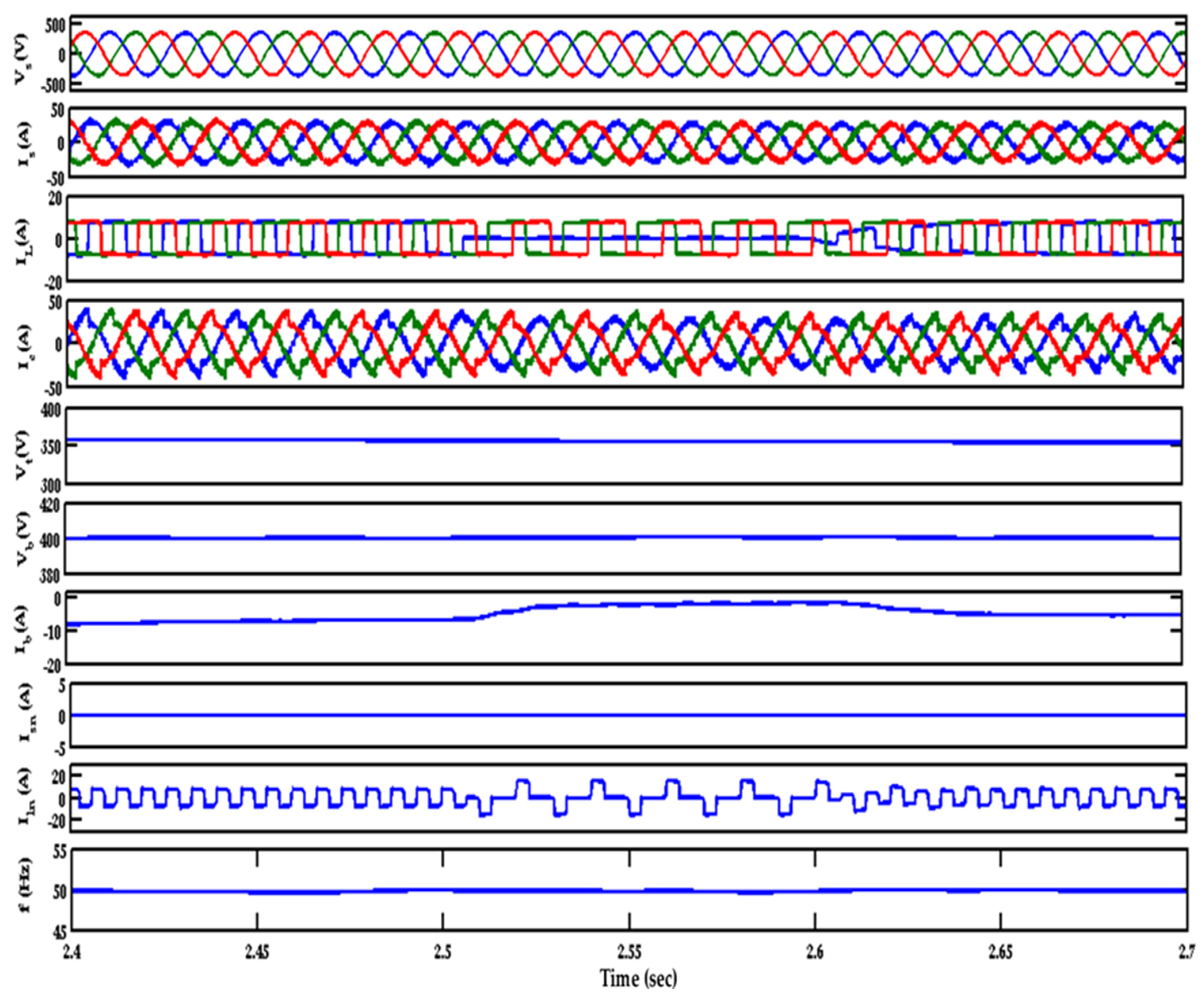
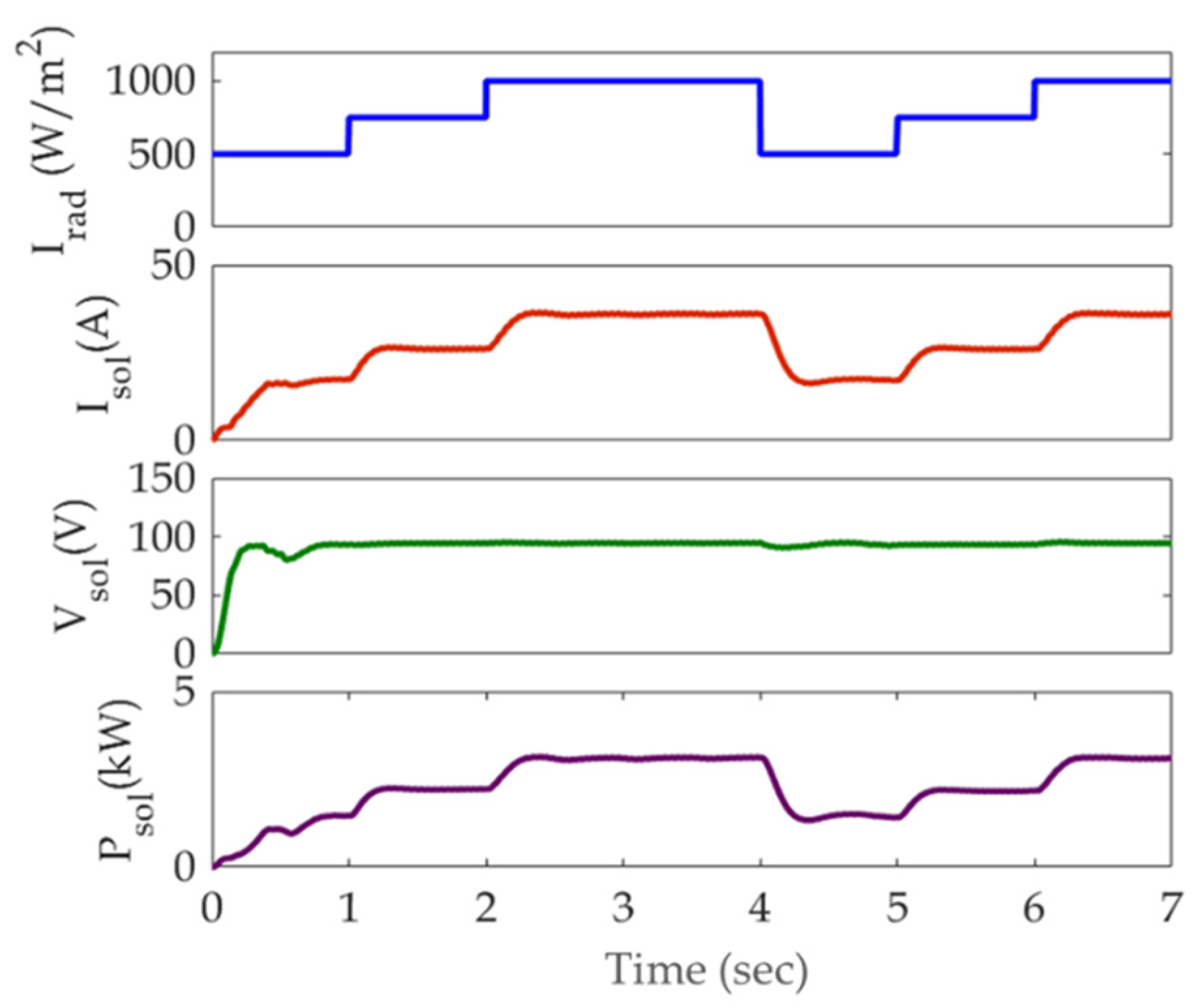
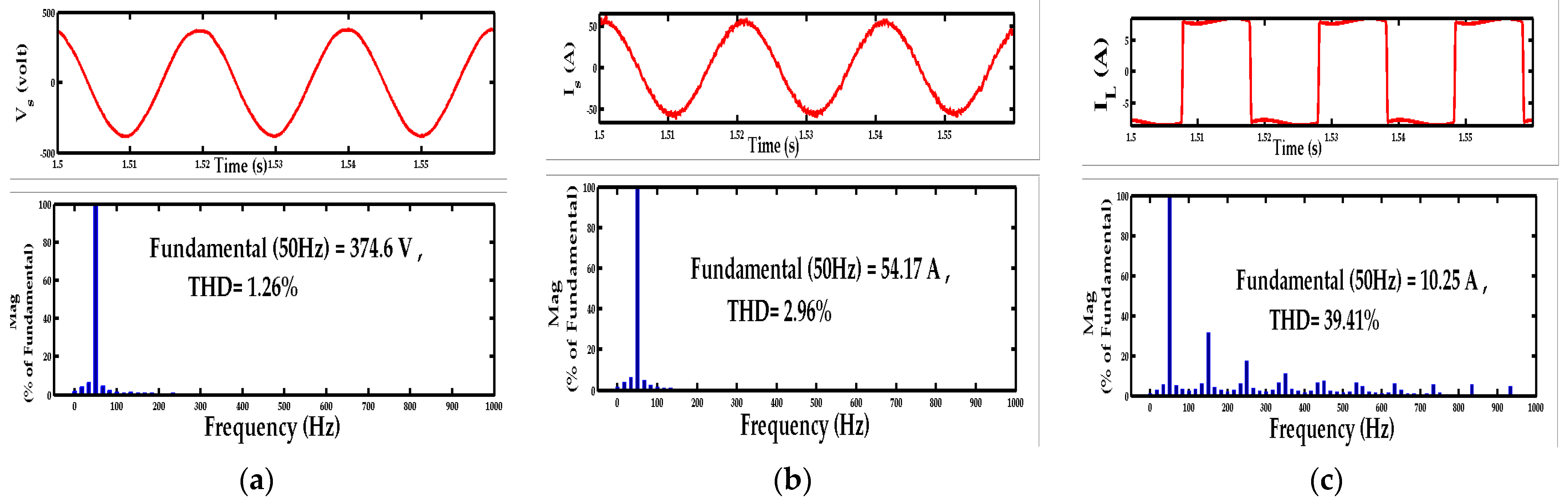
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Giant Leap Forward in Floating Wind: Siemens Gamesa Lands the World’s Largest Project, the First to Power Oil and Gas Offshore Platforms. Available online: https://www.siemensgamesa.com/-/media/siemensgamesa/downloads/en/newsroom/2019/10/pressrelease-siemens-gamesa-hywind-tampen_en.pdf (accessed on 20 January 2022).
- Boro, D.; Donnou, H.E.V.; Kossi, I.; Bado, N.; Kieno, F.P.; Bathiebo, J. Vertical Profile of Wind Speed in the Atmospheric Boundary Layer and Assessment of Wind Resource on the Bobo Dioulasso Site in Burkina Faso. Smart Grid Renew. Energy 2019, 10, 257–278. [Google Scholar] [CrossRef] [Green Version]
- Zamani, H.; Karimi-Ghartemani, M.; Mojiri, M. Analysis of Power System Oscillations from PMU Data Using an EPLL-Based Approach. IEEE Trans. Instrum. Meas. 2017, 67, 307–316. [Google Scholar] [CrossRef]
- Singh, B.; Arya, S.R. Implementation of Single-Phase Enhanced Phase-Locked Loop-Based Control Algorithm for Three-Phase DSTATCOM. IEEE Trans. Power Deliv. 2013, 28, 1516–1524. [Google Scholar] [CrossRef]
- Philip, J.; Singh, B.; Mishra, S. Performance Evaluation of an Isolated System Using PMSG Based DG Set, SPV Array and BESS, In Proceedings of the 2014 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Mumbai, India, 16–19 December 2014.
- Pathak, G.; Singh, B.; Panigrahi, B.K. Isolated Microgrid Employing PMBLDCG for Wind Power Generation and Synchronous Reluctance Generator for DG System. In Proceedings of the 2014 IEEE 6th India International Conference on Power Electronics (IICPE), Kurukshetra, India, 8–10 December 2014. [Google Scholar]
- Kumar, S.; Verma, A.K. Performance of Grid Interfaced Solar PV System under Variable Solar Intensity. In Proceedings of the 2014 IEEE 6th India International Conference on Power Electronics (IICPE), Kurukshetra, India, 8–10 December 2014. [Google Scholar]
- Verma, A.K.; Singh, B.; Shahani, D. Modified EPLL Based Control to Eliminate DC Component in a Grid Interfaced Solar PV System. In Proceedings of the 2014 6th IEEE Power India International Conference (PIICON), Delhi, India, 5–7 December 2014. [Google Scholar]
- Singh, Y.; Hussain, I.; Singh, B. Power Quality Improvement in Single Phase Grid Tied Solar PV-APF Based System using Improved LTI-EPLL Based Control Algorithm. In Proceedings of the 2017 7th International Conference on Power Systems (ICPS), Pune, India, 21–23 December 2017. [Google Scholar]
- Chandran, V.P.; Murshid, S. Power Quality Improvement for PMSG Based Isolated Small Hydro System Feeding Three-Phase 4-Wire Unbalanced Nonlinear Loads. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 8 August 2019. [Google Scholar]
- Liu, C.; Jiang, J.; Jiang, J.; Zhou, Z. Enhanced Grid-Connected Phase-Locked Loop Based on a Moving Average Filter. IEEE Access 2019, 8, 5308–5315. [Google Scholar] [CrossRef]
- Gude, S.; Chu, C. Dynamic Performance Enhancement of Single-Phase and Two-Phase Enhanced Phase-Locked Loops by Using In-Loop Multiple Delayed Signal Cancellation Filters. IEEE Trans. Ind. Appl. 2020, 56, 740–751. [Google Scholar] [CrossRef]
- Gude, S.; Chu, C.-C. Dynamic Performance Improvement of Multiple Delayed Signal Cancelation Filters Based Three-Phase Enhanced-PLL. IEEE Trans. Ind. Appl. 2018, 54, 5293–5305. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.; Vasquez, J.C. Single-Phase PLLs: A Review of Recent Advances. IEEE Trans. Power Electron. 2017, 32, 9013–9030. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.; Vasquez, J.C. Three-Phase PLLs: A Review of Recent Advances. IEEE Trans. Power Electron. 2016, 32, 1894–1907. [Google Scholar] [CrossRef] [Green Version]
- Luo, S.; Wu, F. Improved Two-Phase Stationary Frame EPLL to Eliminate the Effect of Input Harmonics, Unbalance, and DC Offsets. IEEE Trans. Ind. Inform. 2017, 13, 2855–2863. [Google Scholar] [CrossRef]
- Xie, M.; Zhu, C.Y.; Shi, B.W.; Yang, Y. Power Based Phase-Locked Loop Under Adverse Conditions with Moving Average Filter for Single-Phase System. J. Electr. Syst. 2017, 13, 332–347. [Google Scholar]
- Golestan, S.; Guerrero, J.; Gharehpetian, G.B. Five Approaches to Deal with Problem of DC Offset in Phase-Locked Loop Algorithms: Design Considerations and Performance Evaluations. IEEE Trans. Power Electron. 2015, 31, 648–661. [Google Scholar] [CrossRef] [Green Version]
- De Carvalho, M.M.; Medeiros, R.L.P.; Bessa, I.V.; Junior, F.A.C.; Lucas, K.E.; Vaca, D.A. Comparison of the PLL Control techniques applied in Photovoltaic System. In Proceedings of the 2019 IEEE 15th Brazilian Power Electronics Conference and 5th IEEE Southern Power Electronics Conference (COBEP/SPEC), Santos, Brazil, 1–4 December 2019. [Google Scholar]
- Liu, B.; Zhuo, F.; Zhu, Y.; Yi, H.; Wang, F. A Three-Phase PLL Algorithm Based on Signal Reforming Under Distorted Grid Conditions. IEEE Trans. Power Electron. 2014, 30, 5272–5283. [Google Scholar] [CrossRef]
- Agrawal, S.; Nagar, Y.K.; Palwalia, D.K. Analysis and implementation of shunt active power filter based on synchronizing enhanced PLL. In Proceedings of the 2017 International Conference on Information, Communication, Instrumentation and Control (ICICIC), Indore, India, 17–19 August 2017. [Google Scholar]
- Ramezani, M.; Golestan, S.; Li, S.; Guerrero, J.M. A Simple Approach to Enhance the Performance of Complex-Coefficient Filter-Based PLL in Grid-Connected Applications. IEEE Trans. Ind. Electron. 2017, 65, 5081–5085. [Google Scholar] [CrossRef]
- Wu, C.; Xiong, X.; Taul, M.G.; Blaabjerg, F. Enhancing Transient Stability of PLL-Synchronized Converters by Introducing Voltage Normalization Control. IEEE J. Emerg. Sel. Top. Circuits Syst. 2020, 11, 69–78. [Google Scholar] [CrossRef]
- Yang, C.; Huang, L.; Xin, H.; Ju, P. Placing Grid-Forming Converters to Enhance Small Signal Stability of PLL-Integrated Power Systems. IEEE Trans. Power Syst. 2020, 36, 3563–3573. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vidal, A.; Yepes, A.G.; Gandoy, J.D.; Freijedo, F.D. Small-Signal Modeling, Stability Analysis and Design Optimization of Single-Phase Delay-Based PLLs. IEEE Trans. Power Electron. 2015, 31, 3517–3527. [Google Scholar] [CrossRef] [Green Version]
- Touti, E.; Zayed, H.; Pusca, R.; Romary, R. Dynamic Stability Enhancement of a Hybrid Renewable Energy System in Stand-Alone Applications. Computation 2021, 9, 14. [Google Scholar] [CrossRef]
- Sahoo, S.; Prakash, S.; Mishra, S. Power Quality Improvement of Grid-Connected DC Microgrids Using Repetitive Learning-Based PLL Under Abnormal Grid Conditions. IEEE Trans. Ind. Appl. 2017, 54, 82–90. [Google Scholar] [CrossRef]
- Sun, G.; Li, Y.; Jin, W.; Bu, L. A Nonlinear Three-Phase Phase-Locked Loop Based on Linear Active Disturbance Rejection Controller. IEEE Access 2017, 5, 21548–21556. [Google Scholar] [CrossRef]
- Escobar, G.; Ibarra, L.; Valdez-Resendiz, J.E.; Mayo-Maldonado, J.C.; Guillen, D. Nonlinear Stability Analysis of the Conventional SRF-PLL and Enhanced SRF-EPLL. IEEE Access 2021, 9, 59446–59455. [Google Scholar] [CrossRef]
- Hadjidemetriou, L.; Kyriakides, E.; Blaabjerg, F. A Robust Synchronization to Enhance the Power Quality of Renewable Energy Systems. IEEE Trans. Ind. Electron. 2015, 62, 4858–4868. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Boroyevich, D. Structural Resemblance Between Droop Controllers and Phase-Locked Loops. IEEE Access 2016, 4, 5733–5741. [Google Scholar] [CrossRef]
- Sun, D.; Long, H.; Zhou, K.; Wu, F.; Sun, L. An Improved αβ -EPLL Based on Active Disturbance Rejection Control for Complicated Power Grid Conditions. IEEE Access 2019, 7, 139276–139293. [Google Scholar] [CrossRef]
- Kamran, M.; Mudassar, M.; Fazal, M.R.; Asghar, M.U.; Bilal, M.; Asghar, R. Implementation of improved Perturb & Observe MPPT technique with confined search space for standalone photovoltaic system. J. King Saud Univ.–Eng. Sci. 2018, 32, 432–441. [Google Scholar]
- Salman, S.; Ai, X.; Wu, Z. Design of a P-&-O algorithm based MPPT charge controller for a stand-alone 200W PV system. Prot. Control Mod. Power Syst. 2018, 3, 25. [Google Scholar]
- Bodha, V.R.; Srujana, A.; Kuthuri, N.R. Predictive back-to-back SCHVC for renewable wind power system for scrutinizing quality and reliability. Energy Sources Part A Recovery Util. Environ. Eff. 2019, 41, 3058–3075. [Google Scholar] [CrossRef]
- Sattenapalli, S.; Manohar, V.J. Performance analysis of reference current generation methods with pi controller for single-phase grid connected PV inverter system. J. Green Eng. 2019, 9, 658–672. [Google Scholar]
- Tiruye, G.A.; Besha, A.T.; Mekonnen, Y.S.; Benti, N.E.; Gebreslase, G.A.; Tufa, R.A. Opportunities and Challenges of Renewable Energy Production in Ethiopia. Sustainability 2021, 13, 10381. [Google Scholar] [CrossRef]
- Juma, M.I.; Mwinyiwiwa, B.M.M.; Msigwa, C.J.; Mushi, A.T. Design of a Hybrid Energy System with Energy Storage for Standalone DC Microgrid Application. Energies 2021, 14, 5994. [Google Scholar] [CrossRef]
- Aguilar, R.S.; Michaelides, E.E. Microgrid for a Cluster of Grid Independent Buildings Powered by Solar and Wind Energy. Appl. Sci. 2021, 11, 9214. [Google Scholar] [CrossRef]
- Al-Quraan, A.; Al-Qaisi, M. Modelling, Design and Control of a Standalone Hybrid PV-Wind Micro-Grid System. Energies 2021, 14, 4849. [Google Scholar] [CrossRef]
- Farooq, Z.; Rahman, A.; Hussain, S.M.S.; Ustun, T.S. Power Generation Control of Renewable Energy Based Hybrid Deregulated Power System. Energies 2022, 15, 517. [Google Scholar] [CrossRef]
- Tariq, M.; Zaheer, H.; Mahmood, T. Modeling and Analysis of STATCOM for Renewable Energy Farm to Improve Power Quality and Reactive Power Compensation. Eng. Proc. 2021, 12, 44. [Google Scholar] [CrossRef]
- Khan, Z.A.; Imran, M.; Altamimi, A.; Diemuodeke, O.E.; Abdelatif, A.O. Assessment of Wind and Solar Hybrid Energy for Agricultural Applications in Sudan. Energies 2022, 15, 5. [Google Scholar] [CrossRef]
- Tran, Q.T.; Davies, K.; Sepasi, S. Isolation Microgrid Design for Remote Areas with the Integration of Renewable Energy: A Case Study of Con Dao Island in Vietnam. Clean Technol. 2021, 3, 804–820. [Google Scholar] [CrossRef]
- De Doile, G.N.D.; Rotella Junior, P.; Rocha, L.C.S.; Bolis, I.; Janda, K.; Coelho Junior, L.M. Hybrid Wind and Solar Photovoltaic Generation with Energy Storage Systems: A Systematic Literature Review and Contributions to Technical and Economic Regulations. Energies 2021, 14, 6521. [Google Scholar] [CrossRef]
- Montisci, A.; Caredda, M. A Static Hybrid Renewable Energy System for Off-Grid Supply. Sustainability 2021, 13, 9744. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Alotaibi, M.A.; Alolah, A.I.; Ahmed, M.A. IoT-Based Hybrid Renewable Energy System for Smart Campus. Sustainability 2021, 13, 8555. [Google Scholar] [CrossRef]
- Das, S.R.; Ray, P.K.; Sahoo, A.K.; Ramasubbareddy, S.; Babu, T.S.; Kumar, N.M.; Elavarasan, R.M.; Mihet-Popa, L. A Comprehensive Survey on Different Control Strategies and Applications of Active Power Filters for Power Quality Improvement. Energies 2021, 14, 4589. [Google Scholar] [CrossRef]
- Yoshida, Y.; Farzaneh, H. Optimal Design of a Stand-Alone Residential Hybrid Microgrid System for Enhancing Renewable Energy Deployment in Japan. Energies 2020, 13, 1737. [Google Scholar] [CrossRef] [Green Version]
- Golestan, S.; Matas, J.; Abusorrah, A.M.; Guerrero, J.M. More-stable EPLL. IEEE Trans. Power Electron. 2022, 37, 1003–1011. [Google Scholar] [CrossRef]
- Orosz, T.; Rassõlkin, A.; Kallaste, A.; Arsénio, P.; Pánek, D.; Kaska, J.; Karban, P. Robust Design Optimization and Emerging Technologies for Electrical Machines: Challenges and Open Problems. Appl. Sci. 2020, 10, 6653. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Frequency PI Gains | AC PI Gains | Suitability of the Optimization Algorithm | ||
|---|---|---|---|---|---|
| Kp | Ki | Kp | Ki | ||
| PSO | 6.5 | 1.7 | −0.9 | 0 | Not suitable |
| SPSO | 0.3 | 0 | 1.8 | 0.6 | Not suitable |
| SSA | 5 | 5 | 1.1 | 2.8 | Suitable |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kodakkal, A.; Veramalla, R.; Kuthuri, N.R.; Salkuti, S.R. An Optimized Enhanced Phase Locked Loop Controller for a Hybrid System. Technologies 2022, 10, 40. https://doi.org/10.3390/technologies10020040
Kodakkal A, Veramalla R, Kuthuri NR, Salkuti SR. An Optimized Enhanced Phase Locked Loop Controller for a Hybrid System. Technologies. 2022; 10(2):40. https://doi.org/10.3390/technologies10020040
Chicago/Turabian StyleKodakkal, Amritha, Rajagopal Veramalla, Narasimha Raju Kuthuri, and Surender Reddy Salkuti. 2022. "An Optimized Enhanced Phase Locked Loop Controller for a Hybrid System" Technologies 10, no. 2: 40. https://doi.org/10.3390/technologies10020040
APA StyleKodakkal, A., Veramalla, R., Kuthuri, N. R., & Salkuti, S. R. (2022). An Optimized Enhanced Phase Locked Loop Controller for a Hybrid System. Technologies, 10(2), 40. https://doi.org/10.3390/technologies10020040