1. Introduction
Augmented reality (AR) systems based on head-mounted displays (HMDs) intrinsically provide the user with an egocentric viewpoint and represent the most ergonomic and efficient solution for aiding manual tasks performed under direct vision [
1]. AR HMDs are commonly classified according to the AR paradigm they implement: video see-through (VST) or optical see-through (OST). In binocular VST HMDs, the view of the real world is captured by a pair of stereo cameras rigidly anchored to the visor with an anthropometric interaxial distance. The stereo views of the world are presented onto the HMD after being coherently combined with the virtual content [
2].
By contrast, in OST HMDs, the user’s direct view of the world is preserved. The fundamental OST paradigm in HMDs is still the same as that described by Benton (e.g., Google Glass, Microsoft HoloLens, Epson Moverio, Lumus Optical) [
3]. The user’s own view of the real world is herein augmented by projecting the virtual information on a beam combiner and then into the user’s line of sight [
4].
Although the OST HMDs were once at the leading edge of the AR research, their degree of adoption and diffusion slowed down over the years due to technological and human-factor limitations. Just to mention a few of them: the presence of a small augmentable field of view, the reduced brightness offered by standard LCOS micro displays, the perceptual conflicts between the 3D real world and the 2D virtual image and the need for accurate and robust eye-to-display calibrations [
5].
Some of the technological limitations, like the small field of view, are being and will be likely overcome along with the technological progress. The remaining limitations are harder to cope with.
The pixel-wise video mixing technology that underpins the VST paradigm can offer high geometric coherence between virtual and real content. The main reasons for it are: unlike OST displays, the absence of a user-specific eye-to-display calibration routine; the possibility of rendering synchronously real scene and the virtual content, whereas in OST displays there is an intrinsic lag between the immediate perception of the real scene and the appearance of the virtual elements. From a perceptual standpoint, in VST systems the visual experience of both the real and virtual content can be unambiguously controllable by computer graphics, with everything on focus at the same apparent distance from the user. Finally, VST systems are much more suited than OST systems, to rendering occlusions between real and virtual elements or to implementing complex visualization processing modalities that are able to perceptually compensate for the loss of the direct real-world view.
Despite all these advantages, the visual perception of the real world with VST HMDs is adversely affected by various geometric aberrations [
6,
7,
8]. These geometric aberrations are due to the intrinsic features of cameras and displays (e.g., resolutions limitations and optical distortions) and can be boosted by their relative positioning.
One of the major geometric aberrations typical of VST HMDs is related to the misalignment of viewpoints (parallax) between the capturing cameras and the user’s perspective through the display (i.e., non-orthoscopic setup). The parallax between capturing camera and user’s viewpoint produces distortion into the patterns of horizontal and vertical binocular disparities and this translates into a distorted perception of space.
To recover proper space perception, researchers have put forward various solutions for implementing claimed parallax-free and orthoscopic VST HMDs [
9]. In 1998 Fuchs et al. [
10] were the first to propose a parallax-free VST HMD. In that system, a pair of mirrors was used to bring the camera centres in the same location of the nodal point of the wearer’s eyes.
In a work published in 2000 [
11], a systematic analysis of all the possible distortions in depth perception due to non-rigorous orthostereoscopic configurations was presented. Starting from this comprehensive analysis, the authors pursued the same objective of developing a parallax-free VST HMD by means of a set of mirrors and optical prisms whose goal was to align the optical axes of the displays to those of the two cameras. However, also this solution was characterized by a divergence from the conditions of orthostereoscopy in terms of an offset of approximately 30 mm between camera centre and exit pupil of the display, whose effect the authors claimed to be negligible in terms of perceptive distortions of space.
In 2005 State et al. [
12], presented an innovative VST HMD specifically designed to generate zero eye-camera offset. Their system, specifically intended for use in medical applications, was designed and optimized through a software simulator the outputs of which then guided the development of a proof-of-concept prototype, built via rapid prototyping and by assembling off-the-shelf components. In their simulated scenario, the authors properly addressed all the aspects for implementing an orthoscopic VST visor; yet their actual embodiment did not satisfy all those requirements due to the constructive complexities (e.g., it did not comprise any eye tracker). Therefore, their system could provide a parallax-free perception of the reality only for user-specific and constant settings in terms of eye position, inter-pupillary distance and eye convergence.
Finally, in 2009 Bottecchia et al. [
13], proposed an orthoscopic monocular prototype of VST HMD in which a computer-based correction of the parallax was mentioned. Unfortunately, the authors then did not provide further details on the way the parallax was resolved via software.
Unfortunately, all the presented solutions were bulky and mostly designed for applications in which the pair of stereoscopic cameras is mounted parallel to each other.
By contrast, for those AR applications in which the user is asked to interact with the augmented scene within personal space (i.e., at distances below 2 m), the stereo camera pair ought to be pre-set at a fixed convergence for ensuring sufficient stereo overlaps and granting proper stereo fusion, i.e., toed-in setup [
14,
15,
16,
17]. This angle of convergence should be established based on assumptions made on the average working distance. In such configuration, for preserving a natural visual perception of the space (i.e., the conditions of orthostereoscopy) and reduce stereoscopic distortions as keystone distortion and depth-plane curvature, theoretically also the two displays should be physically converged of the same angle [
11,
18]. Yet, this requirement cannot be fulfilled from a practical standpoint and this has implications on the ability of the stereoscopic system to recovering natural depth perception.
When VST HMDs with parallel stereo cameras are intended for use in close-range tasks, a valid alternative is represented by the purely software mechanism proposed in [
19]. In their solution, the idea was to maximize via software the stereo overlaps by handling dynamically the convergence or the shearing of the display frustum based on a heuristic estimation of the working distance.
In line with this approach, we here present a method for properly recovering natural stereo fusion of the scene at a predefined distance from the observer in a binocular VST system designed for tasks performed within arm’s reach. Our method explicitly takes into consideration the geometry of the setup and the intrinsic parameters of camera and display for computing the appropriate plane-induced homography between the image planes of the stereo cameras and those of their associated displays. On each side, such perspective preserving homography is used for consistently warping the image grabbed by the camera before rendering it onto the corresponding display. This solution, yields a parallax-free perception of the reference plane and, together with the quasi-orthoscopic setup of the VST HMD, manages to recover almost entirely the natural perception of depth in the space around the reference distance. The selection of the reference plane for the homography for a specific use case is based on assumptions made on the average working distance.
For validating our approach, we took advantage of the hybrid nature of a custom-made see-through HMD [
20], which supports both video and optical see-through modalities, for drawing an experimental setup whose goal was twofold. First goal was to assess, under OST view, the resulting monoscopic displacement between real features and synthetic ones at various depths around the one taken as reference for the estimation of the homography. The second goal of the tests was to evaluate quantitatively whether and how such displacements affected the perception of the relative depths in the scene under VST view. To this end, we eventually performed preliminary subjective tests aimed at measuring the accuracy in perceiving relative depths through the VST HMD.
2. Materials and Methods
This section is structured as follows.
Section 2.1 provides a detailed description of the binocular hybrid video-optical see-through HMD used in this study.
Section 2.2 outlines the geometry of the homography induced by a plane that yields a consistent perspective-preserving image warping of the camera frames.
Section 2.3 briefly contains a short description of the AR software framework running on the HMD. Finally,
Section 2.4 introduces the methodology adopted for validating the method.
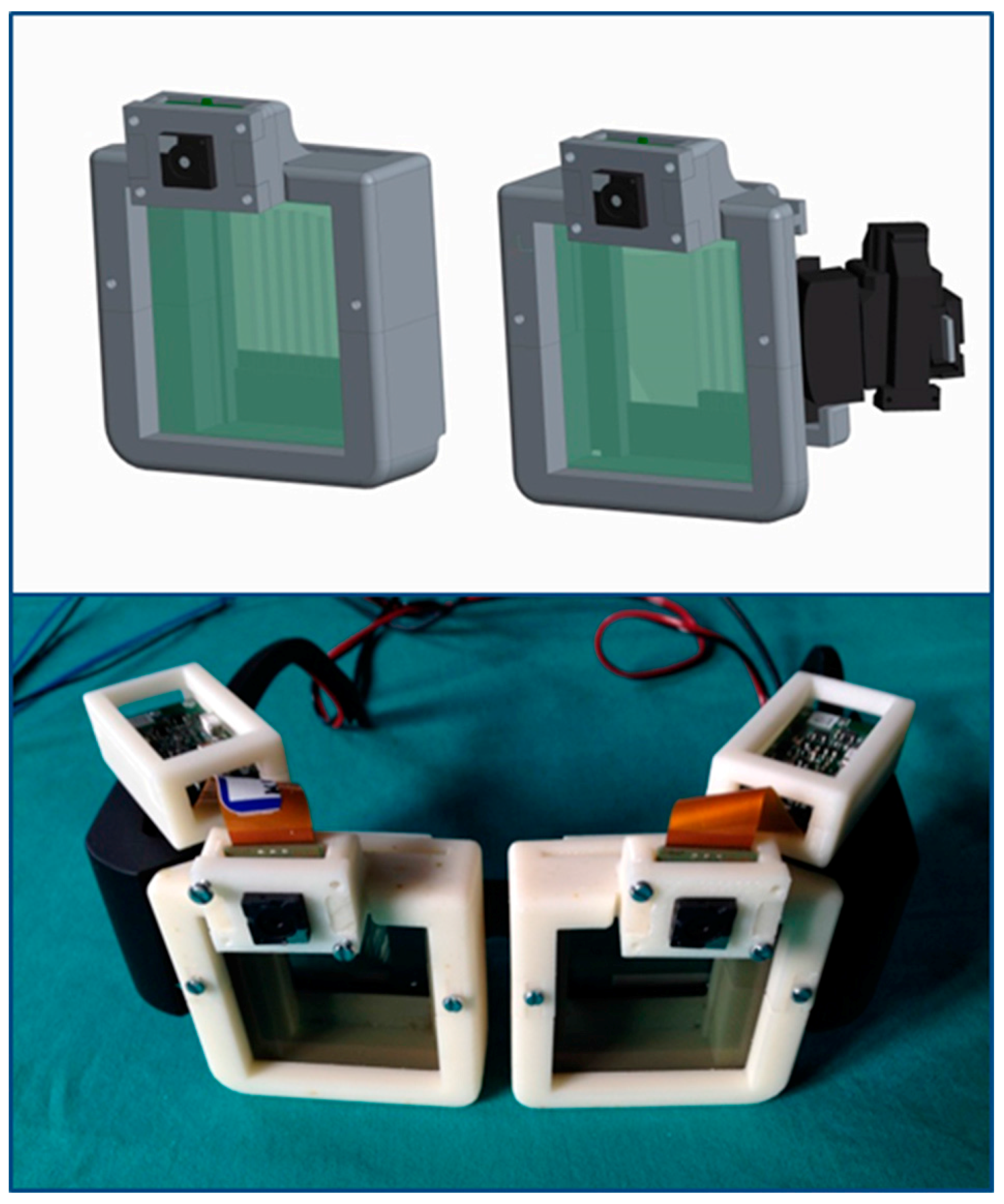
2.1. Binocular Hybrid Video/Optical See-Through HMD
In a previous study, we presented a novel approach for the development of stereoscopic AR HMDs able to offer the benefits of both the video and the optical see-through paradigms [
20]. The hybrid mechanism was made possible by means of a pair of electrically-driven LC shutters (FOS model by LC-Tec [
21]) mounted ahead of the waveguides of a OST HMD, opportunely modified for housing a pair of stereo cameras. The transition between the unaided (OST) and the camera-mediated (VST) view of the real scene is allowed by acting on the transmittance of the electro-optical shutter. As in the first prototype, the hybrid VST/OST HMD is based on a reworked version of a commercial binocular OST HMD (DK-33 by LUMUS [
22]). The optical engine of the visor features a 1280 × 720 resolution, a horizontal FoV (hFoV) of
and a vertical FoV (vFoV) of
. The stereo camera pair is composed by two Sony FCB-MA13 cameras equipped with a
CMOS sensor; the cameras are extremely compact in size (
×
×
mm) and have the following characteristics: horizontal FoV =
°, vertical FoV =
° and frame rate of
fps at 1920 × 1080 resolution.
The key differences between the previous prototype and the one that we used in this study are: stereo camera placement and orientation (
Figure 1).
As for the stereo camera placement, to pursue a quasi-orthostereoscopic view of the scene under VST modality here we opted for a setup featuring an anthropometric interaxial distance (
65 mm), hence we mounted the pair of cameras on the top of the two waveguides. To the same end and as previously done in [
1,
19,
23], we opted for a parallel stereo camera setting. Indeed, in AR visors specifically designed for close-up tasks as ours, a toed-in stereo camera setting would undoubtedly widen the area of possible stereo overlaps [
17,
24]. Yet this configuration, if not coupled with a simultaneous convergence of the optical display axes, would also distort the horizontal and vertical patterns of binocular disparities between the stereo frames. This fact would go against the achievement of a quasi-orthostereoscopic VST HMD and it is deemed to lead to significant distortions in absolute and relative depth perception [
25,
26].
2.2. Perspective Preserving Planar Homography
This section describes the procedure followed for computing the perspective preserving homography. The goal was to find the geometric relation between two perspective visions of a planar scene placed at a pre-defined distance. With reference to
Figure 2 and to the equations below, from now on we shall consider the following convention of variables and symbols:
The homography transformations
and
, which relate respectively the points of the reference plane
in the world to their projections onto the image planes of both the display and the camera:
where the points are expressed in homogeneous coordinates and where
and
are generic scale factors due to the equivalence of homogeneous coordinates rule.
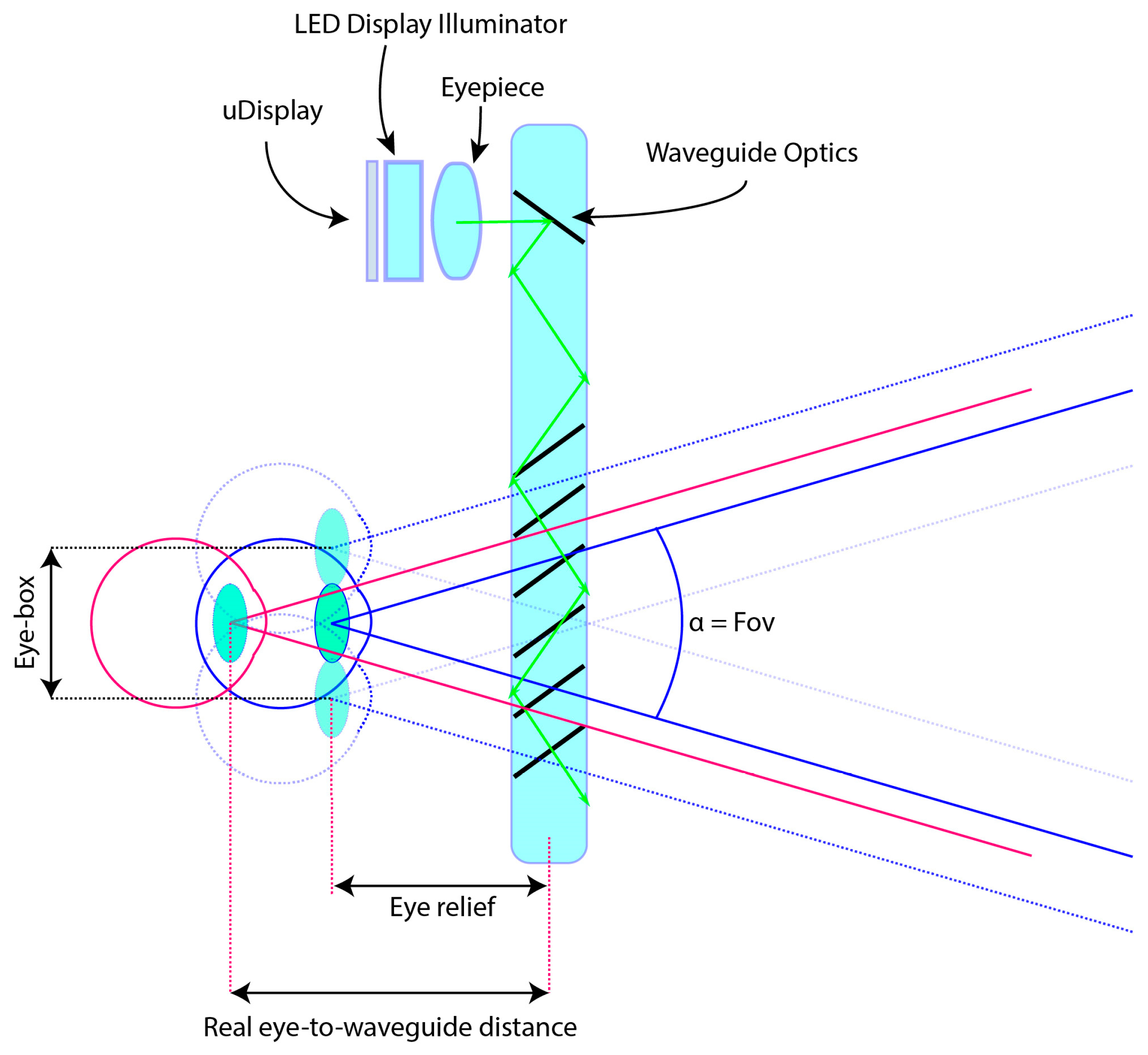
The distance between the vertex of the display frustum ( and the reference plane .
The eye relief, which represents the fixed distance between and the eyepiece lens of the display.
The eye-box (or eye motion box), which consists of that range of allowed eye’s positions, at a pre-established eye-relief distance, from where the full image produced by the eyepiece of the display is visible.
and , which are respectively the rotation matrix and the translation vector between camera reference system (CRS) and display reference system (DRS).
and
, which are the intrinsic matrixes of camera and display.
encapsulates the camera intrinsic parameters and it is computed by using the Zhang’s method [
27] implemented within the camera calibrator tool of MATLAB.
encapsulates the parameters of the near-eye display’s frustum and it is approximately derived from the specifics of the HMD as follows [
28]. We derived the focal length of the display (
) by using the factory specifics of the horizontal and vertical FoV of the display. In our ideal pinhole camera model of the display, the focal length was set equal on both x-axis and y-axis (
, meaning the pixels of the display were considered as perfectly square. As coordinates of the principal point (
and
) we considered exactly half of the display resolution (
= Width/2 = 640,
= Height/2 = 360). In summary, we assumed:
, which is the perspective preserving homography, induced by a fixed plane placed at distance from .
, which is the normal unit vector to the plane .
The sought homography transformation
, describes the point-to-point relation between camera viewpoint and user’s viewpoint, such that:
The parenthesis means that the homography is a function of respectively: the relative pose between camera reference system and display reference system, the intrinsic parameters of camera and display and the position and orientation of the reference plane in the scene ().
For referring everything to the display we can compute and inverting the result afterwards (see Equation (4)).
is described by a matrix
and it is function of the pose between camera frustum and display frustum and of the two intrinsic matrixes as follows (for referring everything to the display we have computed
by inverting
) [
29,
30,
31]:
The homography transformation (4) is only valid on a fixed plane, perpendicular to the optical axis of the display and placed at a predefined distance (). If the plane under observation is different or if the observed scene is not planar, its perceived view (through-the-waveguide view) does not match with the rendered image on the display (i.e., direct view and VST view are not orthoscopically registered).
Another important aspect to consider is the actual position of the nodal point of the user’s eye (
) with respect to the DRS. This brings about changes in the variables plugged in Equation (3): in the previous equations, we assumed that the nodal point of the eye (eye centre) was located exactly at the vertex of the display frustum (i.e.,
or
). Unfortunately, this is hardly the case in reality. In addition, we must consider the optical properties of the display eyepiece (i.e., eye relief, eye-box, virtual or focal plane position) (
Figure 3). These properties play a role in the way in first approximation the non-ideal eye placement in the display reference system (
affects the elements of
.
In summary, Equation (4) becomes:
where
ought to be known and where the intrinsic matrix of the display
is different from the original
. In view of these considerations, an orthoscopic alignment is attained in theory only if we could determine with absolute accuracy the user’s eyes position in the HMD’s eyepiece reference system (i.e., DRS). Indeed, in Equation (3) the pose between eye and camera assumes a key role. Unfortunately, the eye position in the DRS and consequently in the CRS, varies according to how the HMD is worn and is dependent on the user’s facial shape (e.g., inter-pupillary distance).
Since our HMD did not comprise any eye-tracker to calibrate the stereo cameras to the user’s inter-pupillary distance and since we did not perform any specific display calibration (for precisely determining
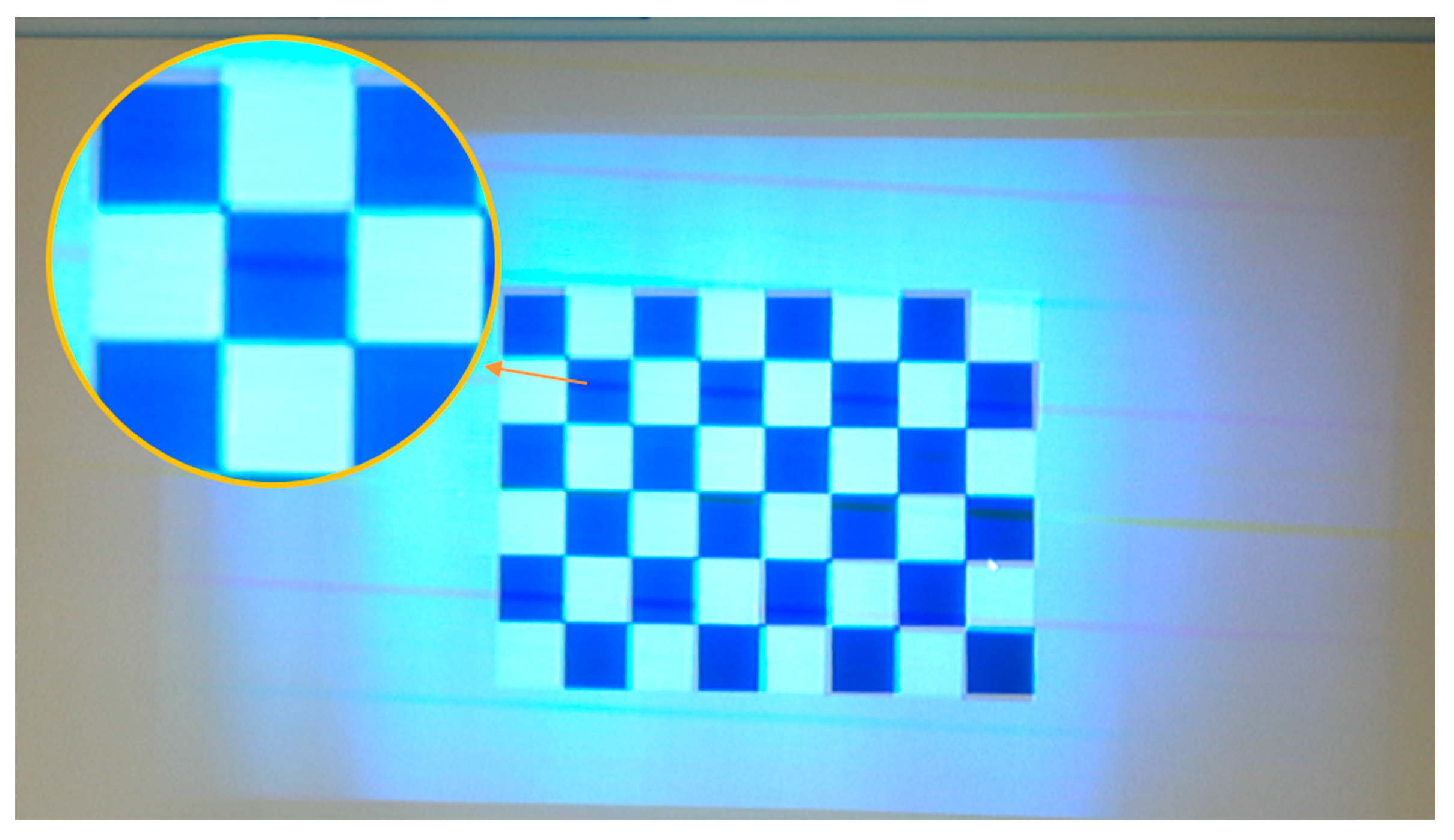
), in our tests we determined an approximation of the homography
as follows. We asked the user to wear the HMD and observe under OST modality a target checkerboard placed orthogonally to his own viewpoint at approximately the distance of the homography plane
(
Figure 4). We then performed, in real time, multiple refinements of the initial homography
by means of an additional translational homography (
) whose role was to align the user’s views of the checkerboard (real and synthetic). With this additional homography we intended to compensate for the uncertainties in defining the actual position of the eye
E with respect to
D. In our method, we only considered the effect of translational movements along the x and y-axis (parallel to the image plane). Thus, to a first approximation, we excluded the effect of a non-perfect placement of the user’s eye centres at the eye-relief (i.e., we assumed: eye relief = real eye-to-waveguide distance). The relation between the approximated homography
and the ideal
then becomes:
In conclusion, unlike the method proposed by Tomioka et al. [
30], we estimate the user-specific homography uniquely by means of design and calibration data. The homography is then refined to embody the effects of the intrinsic parameters of the displays and of the non-ideal eyes placement in the HMD so as to be adapted to the subject’s interpupillary distance (IPD).
2.3. Software Application
For validating our method, we developed a dedicated software application whose main goal was to manage the camera frames as follows. Camera frames are first grabbed and opportunely undistorted for eliminating the non-linearities due to radial distortions. The undistorted frames are warped according to the perspective preserving homography. The warped frames are rendered onto the background of a stereoscopic scenegraph that is finally screened onto the binocular HMD. For this application, we did not add any properly registered virtual content to the scenegraph, as our objective was uniquely to perform perceptual studies on how depth perception was retrieved under VST view.
The application was created in the form of a single executable file with shared libraries all built in C++, following the same logic of the AR software framework previously developed in [
32]. As for the library managing the rendering of the scenegraph, we used the open-source library for 3D computer graphics and visualization Visualization Toolkit (VTK), version 7.0.0 [
33]. As regards the machine vision routines, needed for processing the camera frames before rendering them onto the background of the scene-graph, we adopted the open-source software library OpenCV 3.1 [
34].
2.4. Tests
The proposed solution combines a perspective preserving warping mechanism with a quasi-orthoscopic setting of the VST HMD. The goal of our tests was to assess the efficacy of such solution in recovering the natural perception of depth in the space around a pre-established distance from the observer. We grouped the tests into two basic categories: tests for measuring the patterns of on-image disparities, under OST modality, between real features and HMD-mediated ones and tests for assessing objectively and subjectively the depth estimation accuracy under VST modality.
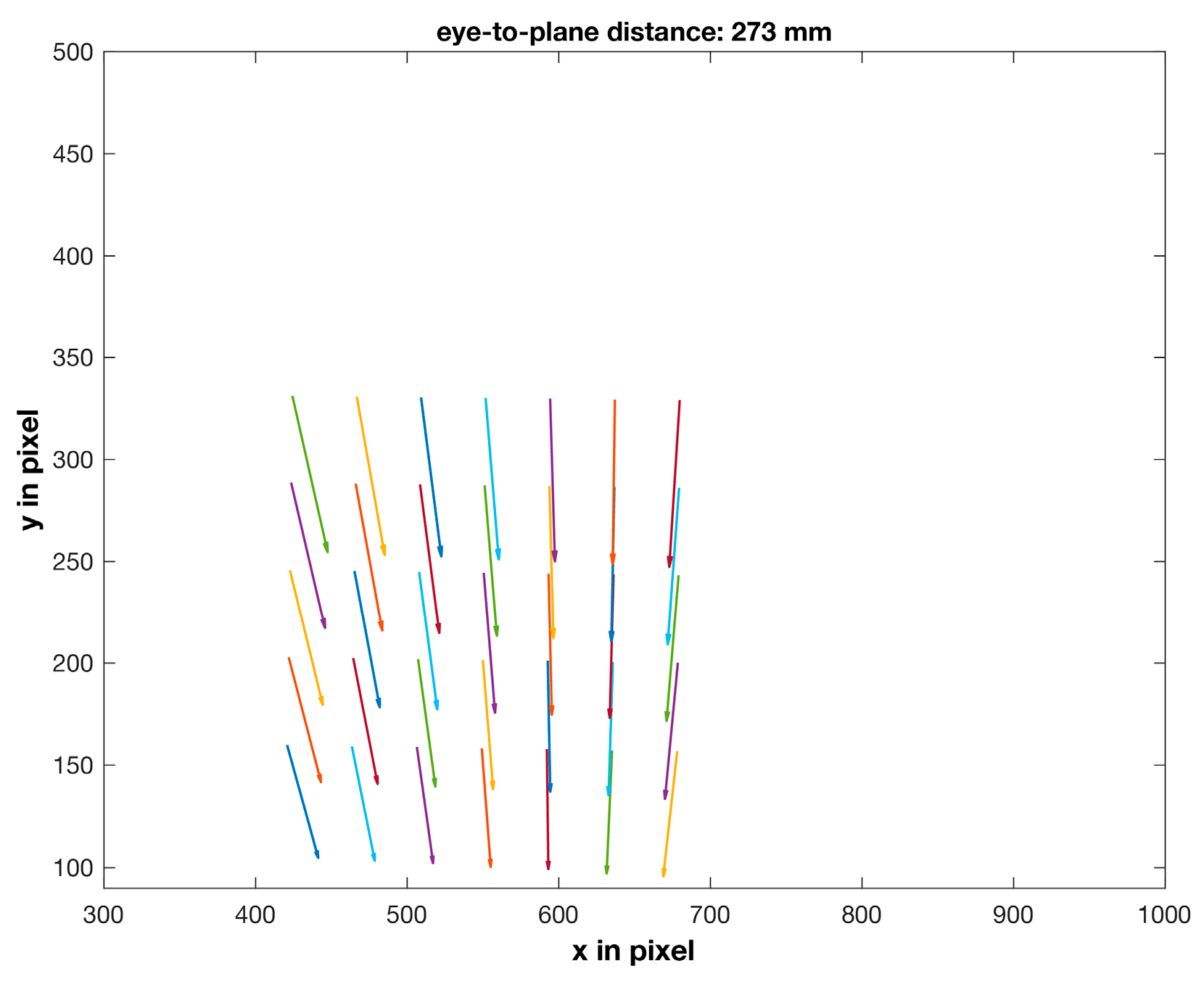
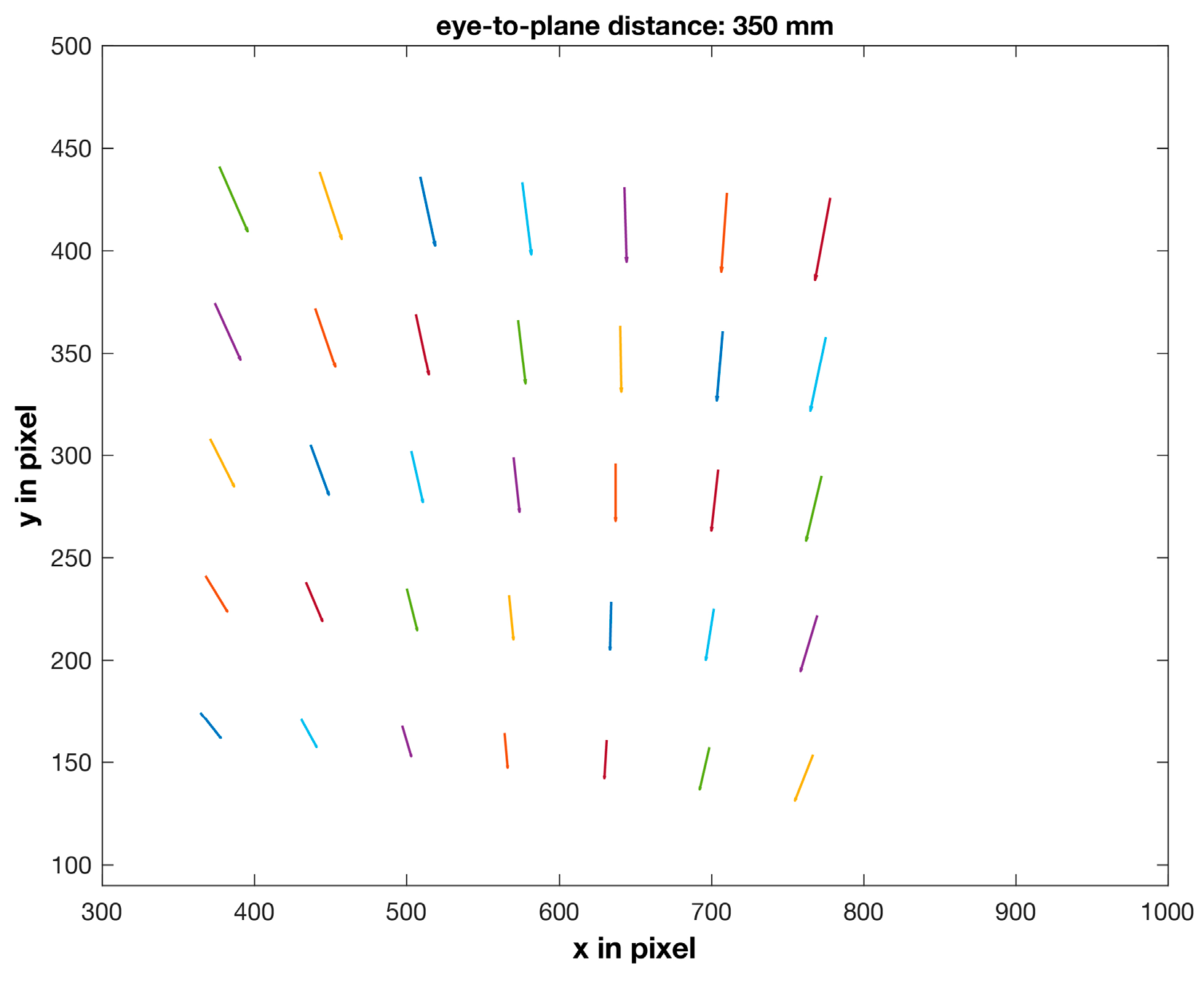
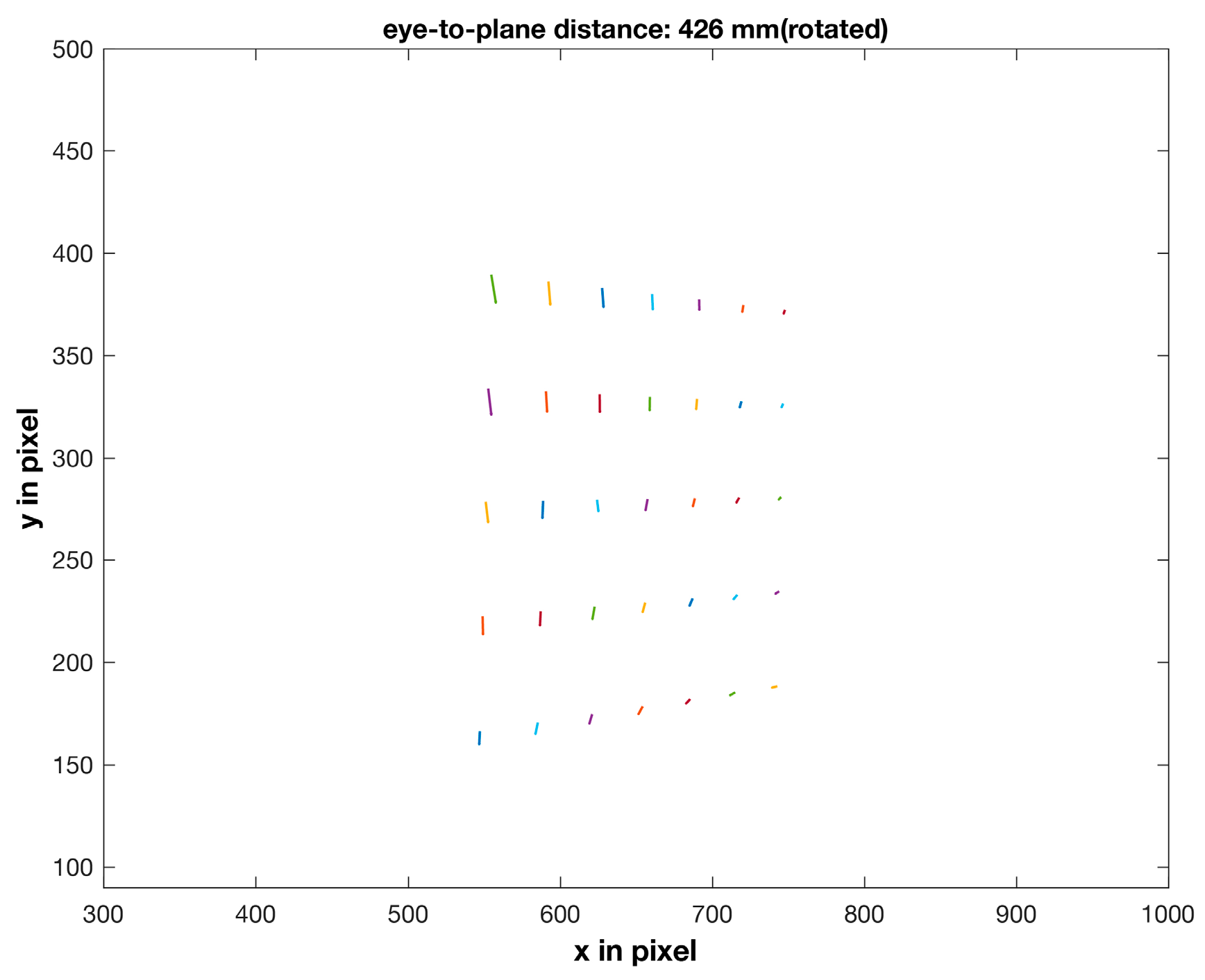
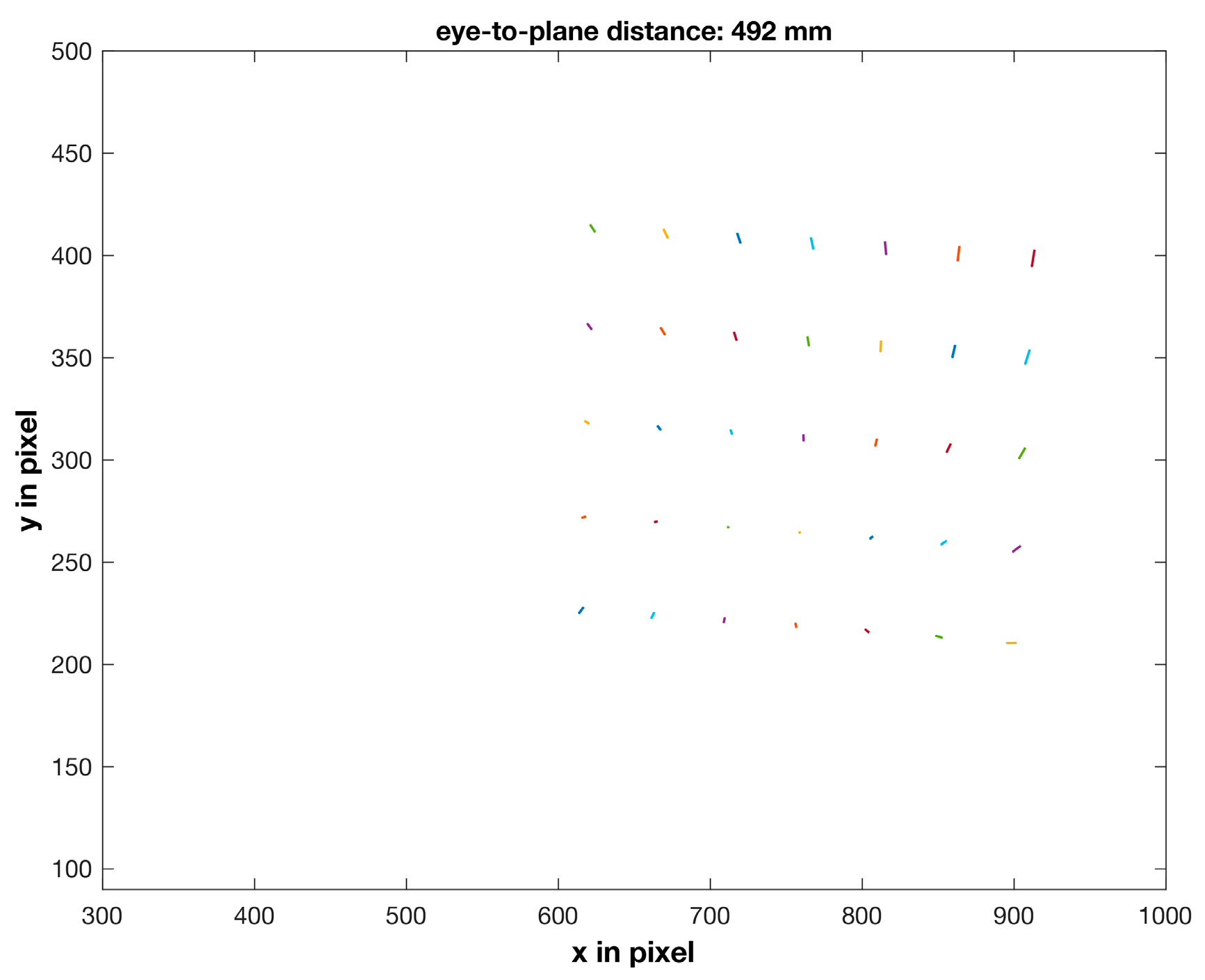
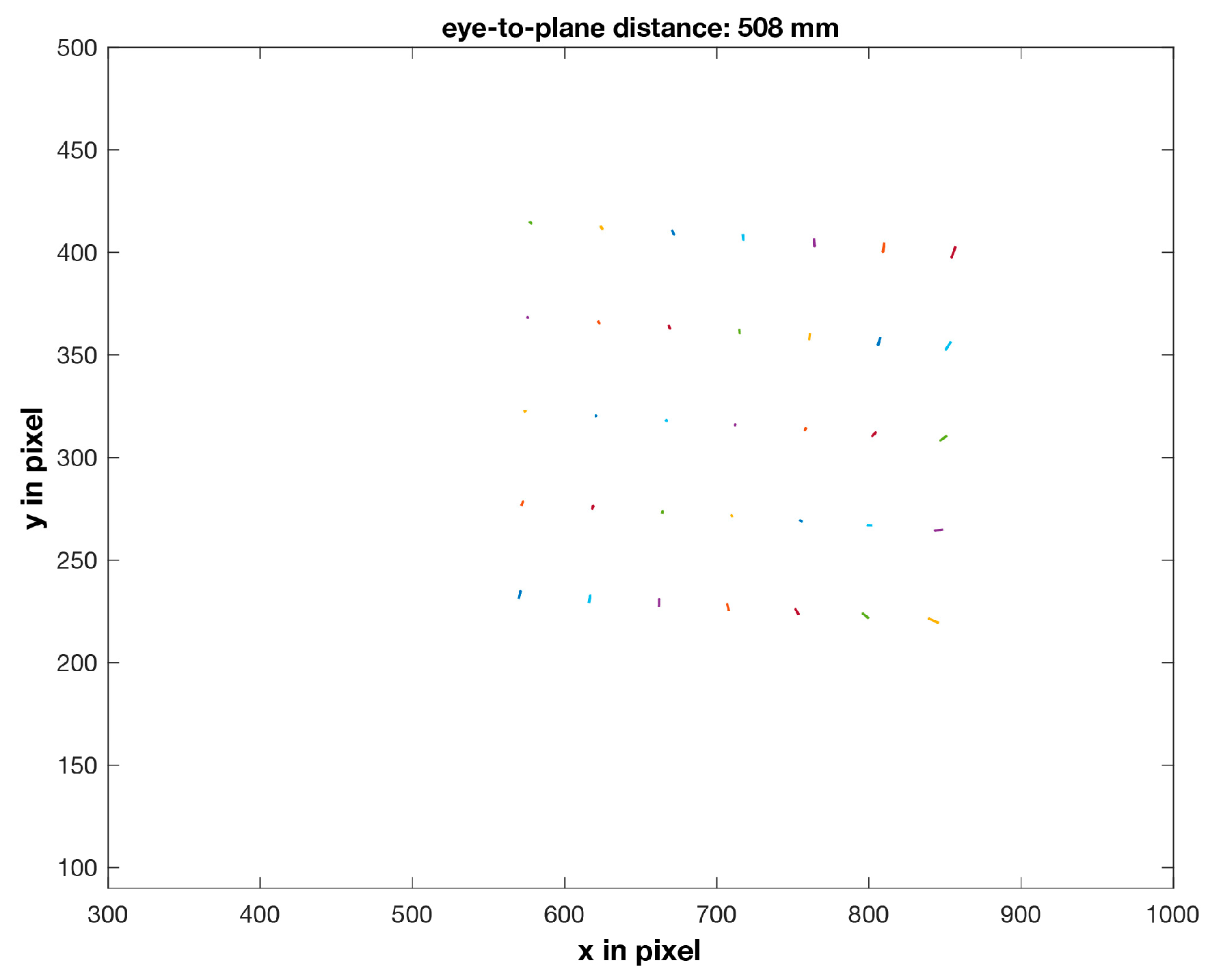
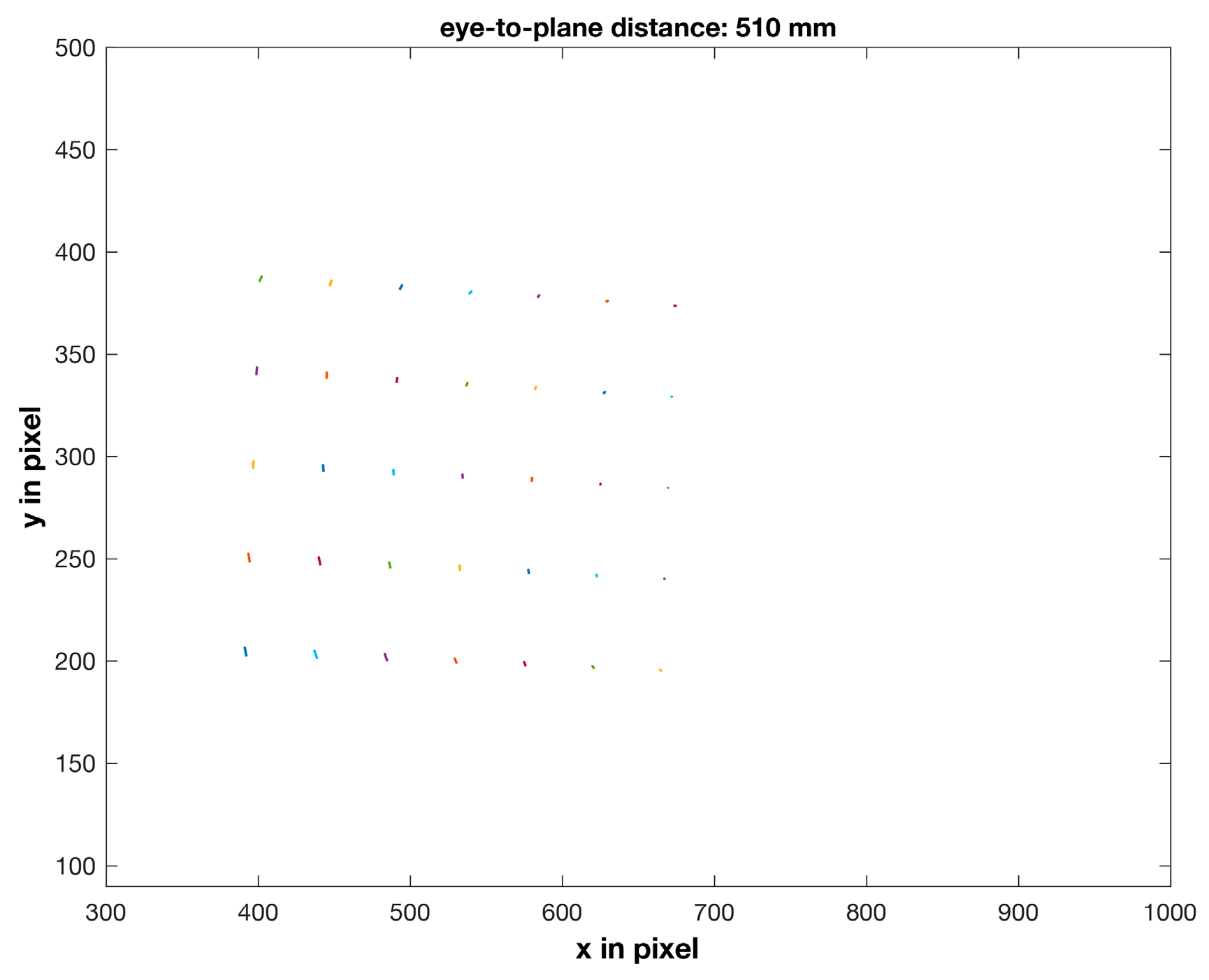
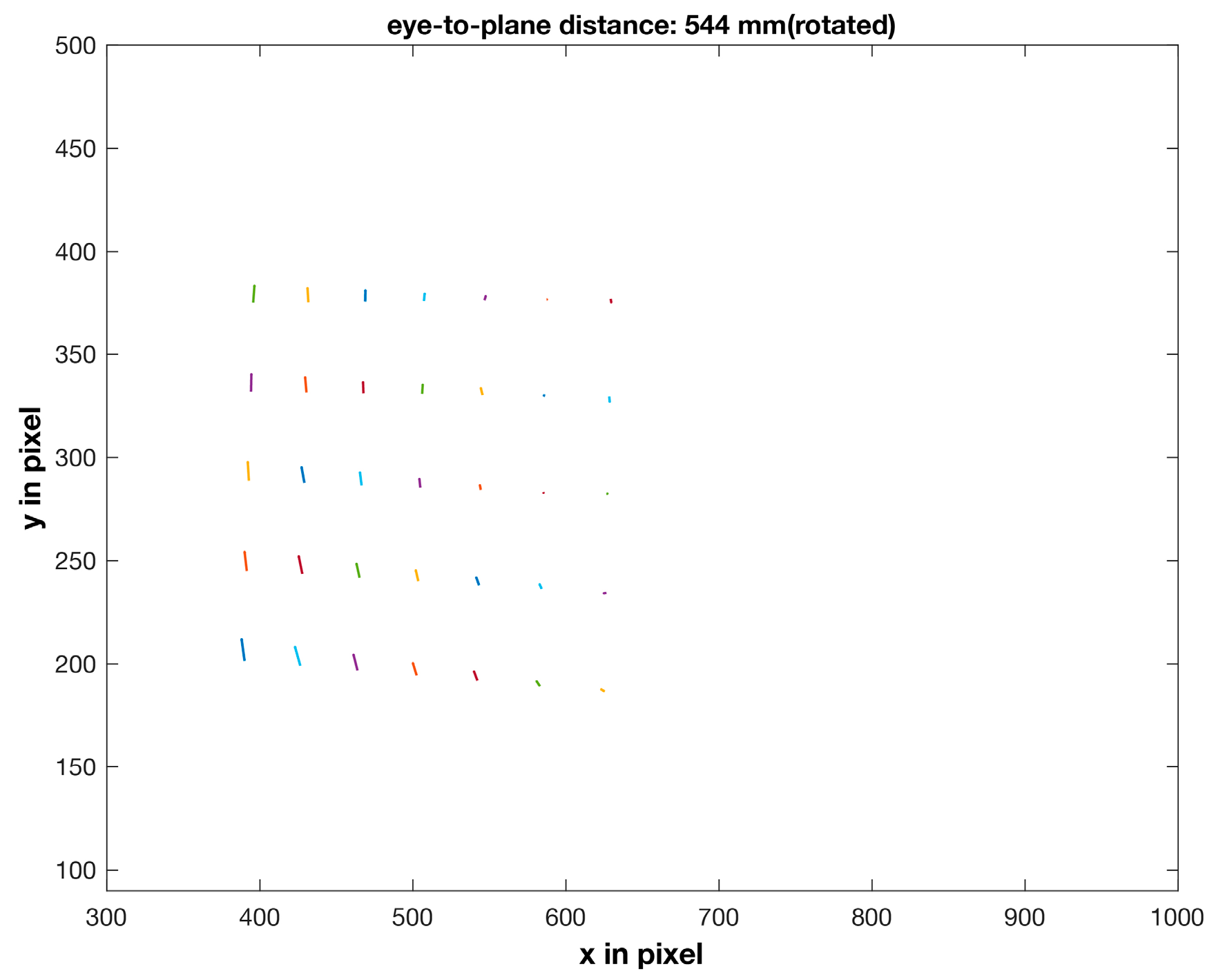
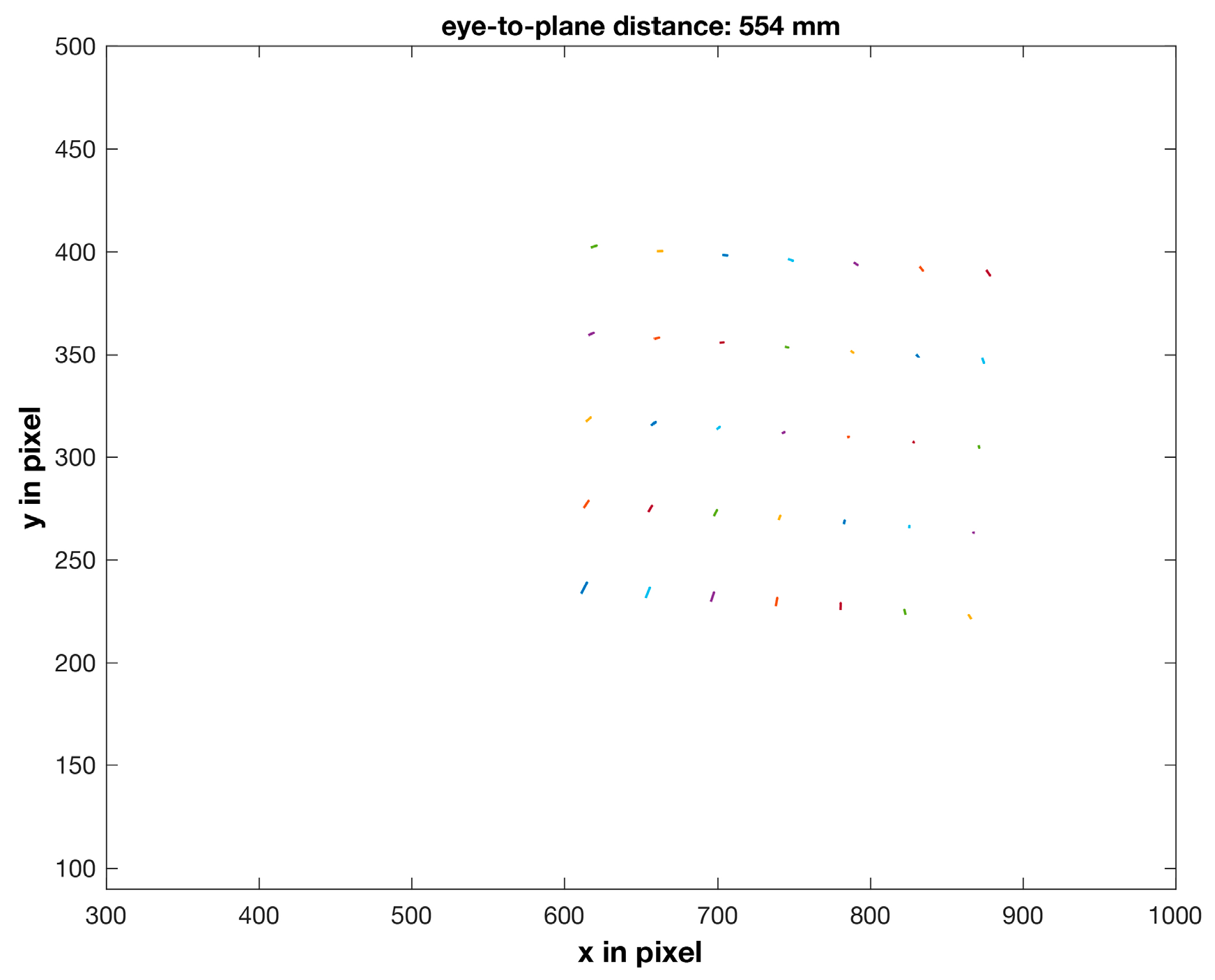
2.4.1. Test 1: Measure of on-Image Displacements between Direct View and VST View
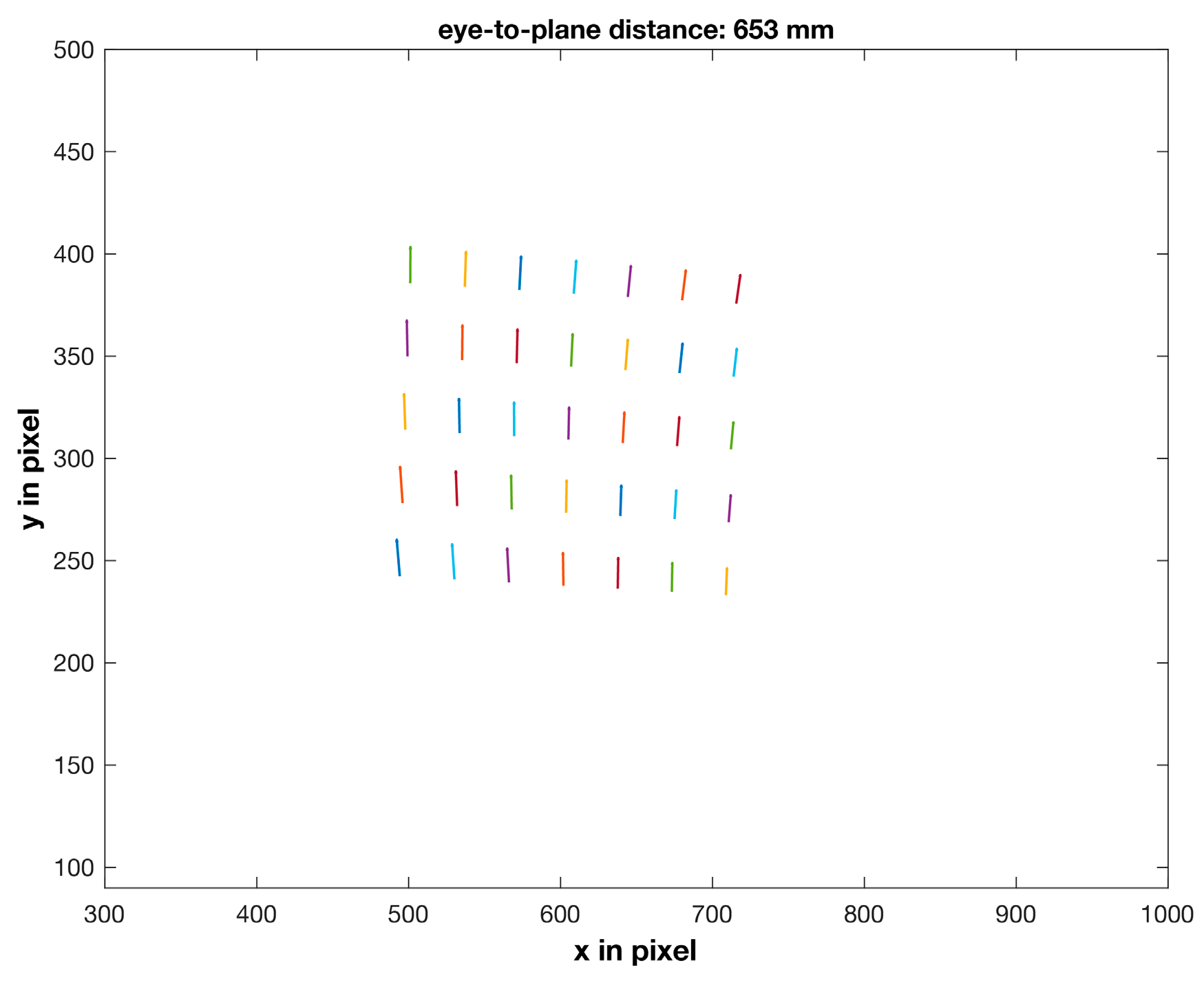
For measuring the patterns of monoscopic disparities between direct view and VST view, we used the experimental setup showed on
Figure 4. The on-image displacements between real features and HMD-mediated ones were measured by means of an additional video camera (Sony FCB-MA13) placed approximately at the ideal eye’s position (internal camera). As target scene, we used a standard checkerboard of size 160 × 120 mm (with square size 20 mm) that was displayed on an external monitor. The internal camera was able to capture two views of the target scene: a direct view and a VST view (
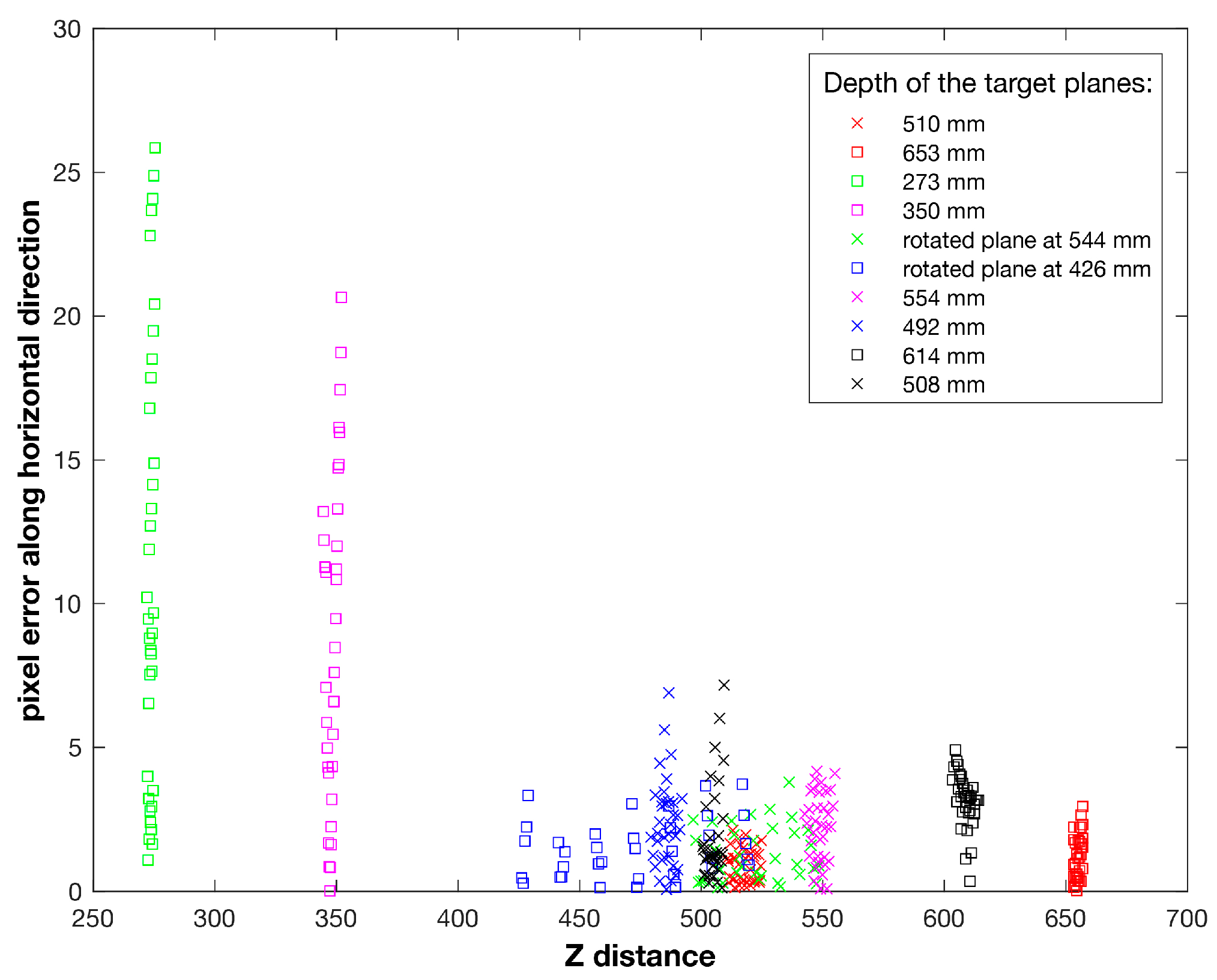
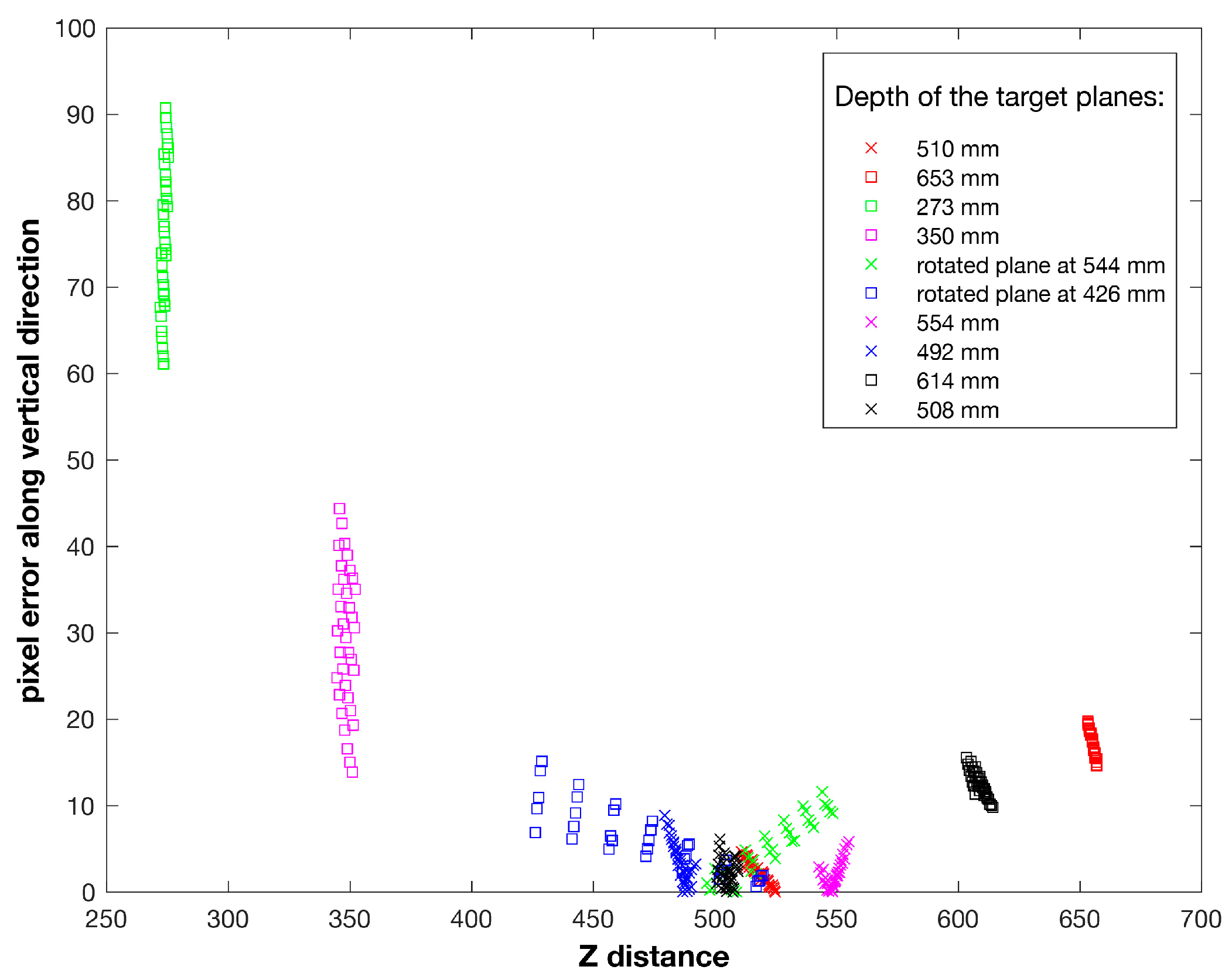
Figure 5). The corners of the checkerboard could be robustly detected through a Matlab’s function for corners detection. The on-image displacements or monoscopic disparities between the image coordinates of the real and VST views of the corner points were so easily determined. The real poses of the target planes with respect to the internal camera were estimated by solving a standard perspective-n-point problem and knowing the 3D-2D point correspondences.
We repeated such measurements at various depths around the one taken as reference for the estimation of the homography (plane). The range of depths for which the disparities were measured was: (250–650) mm.
2.4.2. Test 2: Assessment of Depth Perception through Objective and Subjective Measures
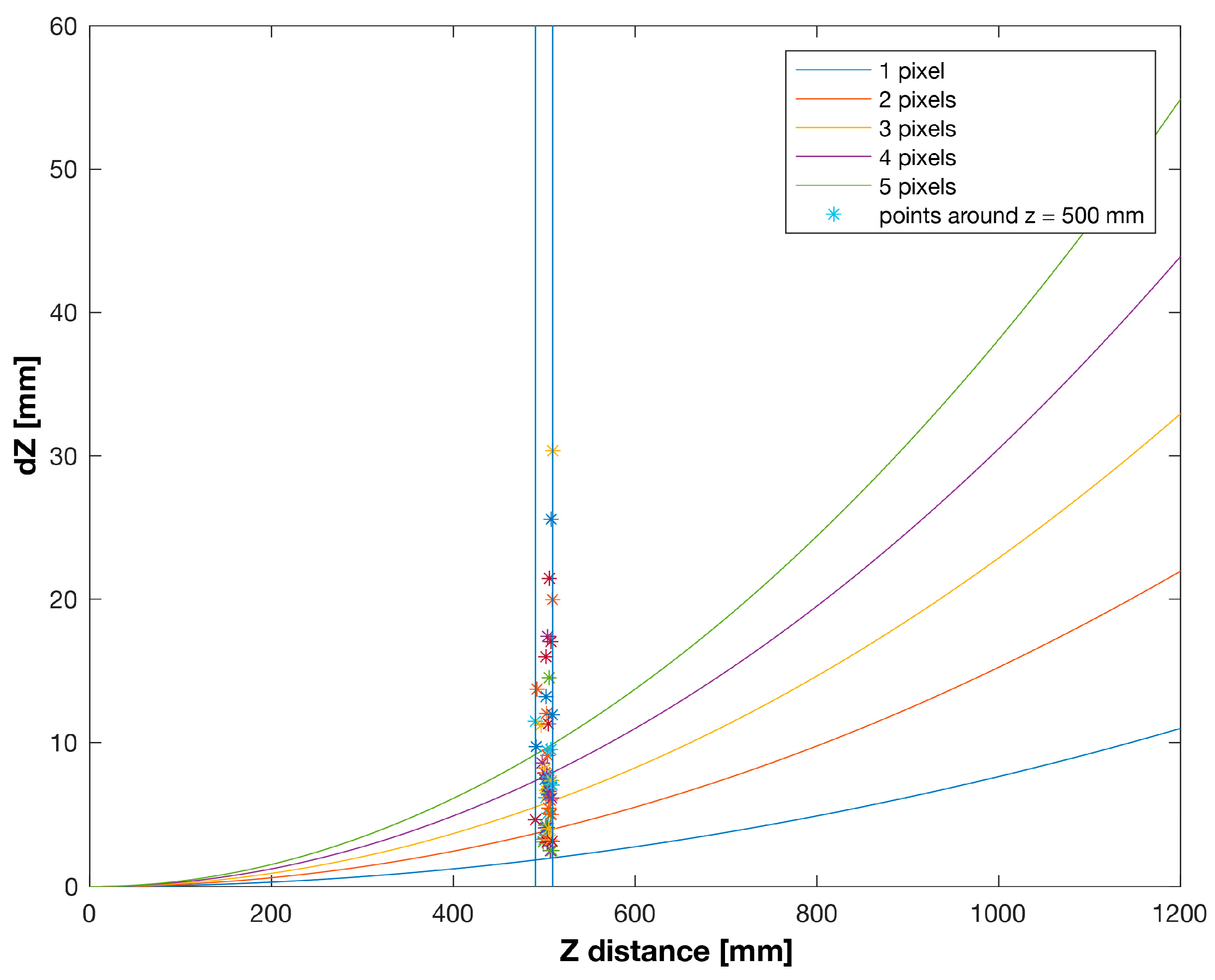
For assessing the degree of accuracy in depth estimation under VST view, we conducted 2 different sets of measurements. At first, we computed the resulting angles of retinal disparities yielded by the monoscopic displacements on both views; these binocular disparities can provide a quantitative estimation of the uncertainty in detecting the relative depths between objects due to the non-ideally orthoscopic setting of the VST HMD. Secondly, we performed a preliminary user study aimed at assessing the accuracy in perceiving relative depths at different distances within personal space (within 1.2 m). Before the session of tests, the homography was refined under OST modality to be adapted to the subject’s IPD.
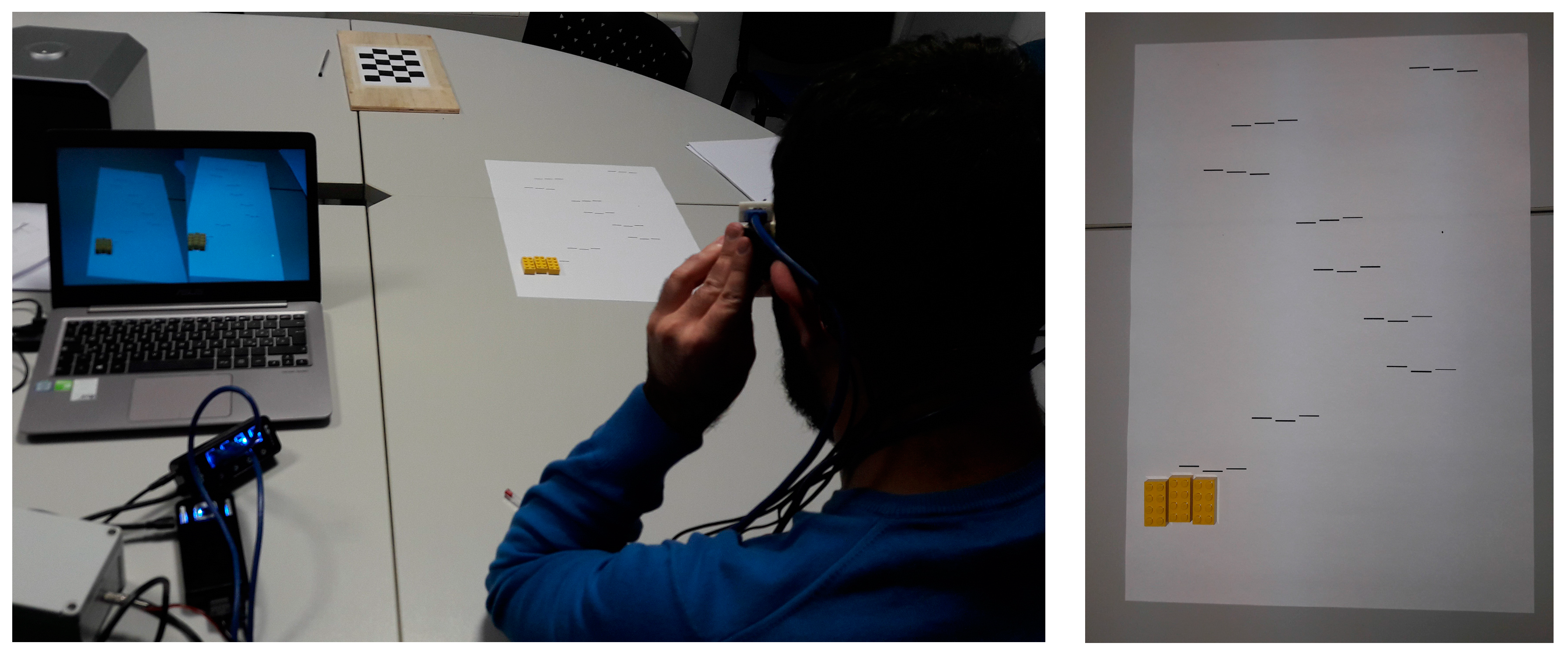
In the tests, one participant wearing the HMD under VST modality was asked to estimate the relative depth relations between three objects of same size and colour (three yellow Lego® bricks of size 9.6 × 32 × 16 mm). We engaged only one participant so as to be consistent in terms of user’s stereoscopic acuity. The bricks were laid on five different A3 paper sheets (size 297 × 420 mm), each of which provided with demarcation lines indicating different relative depths. In each triplet of demarcation lines, the relative distances between the bricks were decided randomly, with a defined relative distance between two adjacent bricks of 2 mm.
The paper sheets were placed at five different distances from the observer (
Figure 6), covering a range of depths of about 900 mm (i.e., from a minimum absolute depth of 300 mm to a maximum depth of 1200 mm). For each position of the paper sheet, the test was repeated four times.
The perceptual tests were all performed keeping the same homography transformation. For all the target planes, the computed homography was referred to a reference plane perpendicular to the optical axis of the display and placed at a distance of 500 mm. The final goal of the tests was indeed to assess on how this aspect would have had a detrimental effect on perceiving relative depths for all the tested distances of the triplets of bricks.
Each paper included ten possible configurations of relative positions between the three bricks, so we tested a total of 4 (n° of sessions) × 5 (n° of paper sheets at different depths) × 10 (n° of configurations of triplets per paper) = 200 configurations of triplets of bricks.
4. Discussion & Conclusions
In this work, we have presented a VST HMD whose geometry violates the rigorous conditions of orthostereoscopy. For properly recovering natural stereo fusion of the scene in a region around a predefined distance from the user, we partially resolve the eye-camera parallax by warping the camera images through a perspective preserving homography.
The appropriate plane-induced homography between the image planes of the pair of stereo cameras and those of their associated displays, is computed by explicitly taking into consideration the geometry of the VST HMD and the intrinsic parameters of camera and display. The homography is therefore estimated uniquely by means of design and calibration data.
For validating our solution, we conducted objective and subjective tests. The goal of the tests was to assess the efficacy of such solution in recovering the natural perception of depth in the space around a pre-established distance from the observer.
Thanks to the hybrid nature of the HMD, which can work also under OST modality, in the first session of tests we measured the patterns of on-image disparities between a direct view of the world and a VST view. An internal camera, placed at the ideal eye’s position, captured both the views of a target plane at different distances and orientations relative to the HMD.
These monoscopic disparities provided an initial measure of the amount of perceptual distortions brought by the non-orthoscopic setting of the HMD. The same disparities were then used to quantitatively estimate the resulting degree of uncertainty in perceiving relative depths under VST view.
Finally, we performed subjective tests aimed at assessing under real-use conditions, the actual depth estimation accuracy under VST view.
From a human-factor standpoint, VST HMDs raise issues related to the user’s interaction with the augmented content and to some perceptual conflicts. With stereoscopic VST HMDs, the user can perceive relative depths between real and/or virtual objects by providing consistent depth cues in the recorded images delivered to the left and right eyes by the two displays of the visor. In our tests, we focused on relative depth measurements since relative depths information are much more important than absolute depths for aiding manual tasks in the personal (and intimate) space [
7,
8].
However, depth perception in binocular VST HMDs has not been fully investigated in literature. In their study, Kyto et al. [
7] performed perceptual tests with a stereoscopic VST HMD aimed at measuring the effect of binocular disparities, relative size and height in the visual field on depth judgments in the action space (distances from 2 to 20 m). Their main finding was that depth perception through VST view in the action space is highly improved by a proper combination of a virtual content (i.e., auxiliary augmentations) providing binocular disparity and relative size cues. In our study, we did not use any sort of auxiliary augmentation since the goal of our perceptual studies was to assess how depth perception is recovered when using non-orthoscopic VST HMDs. Further, our depth judgment tests were performed within the personal and intimate space where the visual interaction with the augmented scene is likely to hide the ground plane and for which other depth cues other than binocular disparities and occlusions are not as relevant.
Overall, the obtained results were surprisingly positive in terms of depth judgment tasks. This is in line with what experienced by State et al. [
19] and suggested by Milgram et al. [
38], who both asserted that the distortion of the visual space derived from the mathematical models underpinning stereo vision is significantly higher than what the user perceives in reality. In our opinion, this fact is mostly motivated by the presence of other binocular depth cues as eyes convergence or monocular ones as linear perspective, texture gradient, shades and shadows [
39]. All these cues contribute to provide a finer perception of depth in the personal space and partially compensate for the distortions brought by the non-orthoscopic setting of the VST HMD. The results of our preliminary perceptual tests were even more positive than the ones presented in [
19], as in our tests the user could not use the hand as a “visual aid” for relative and absolute distance estimations.
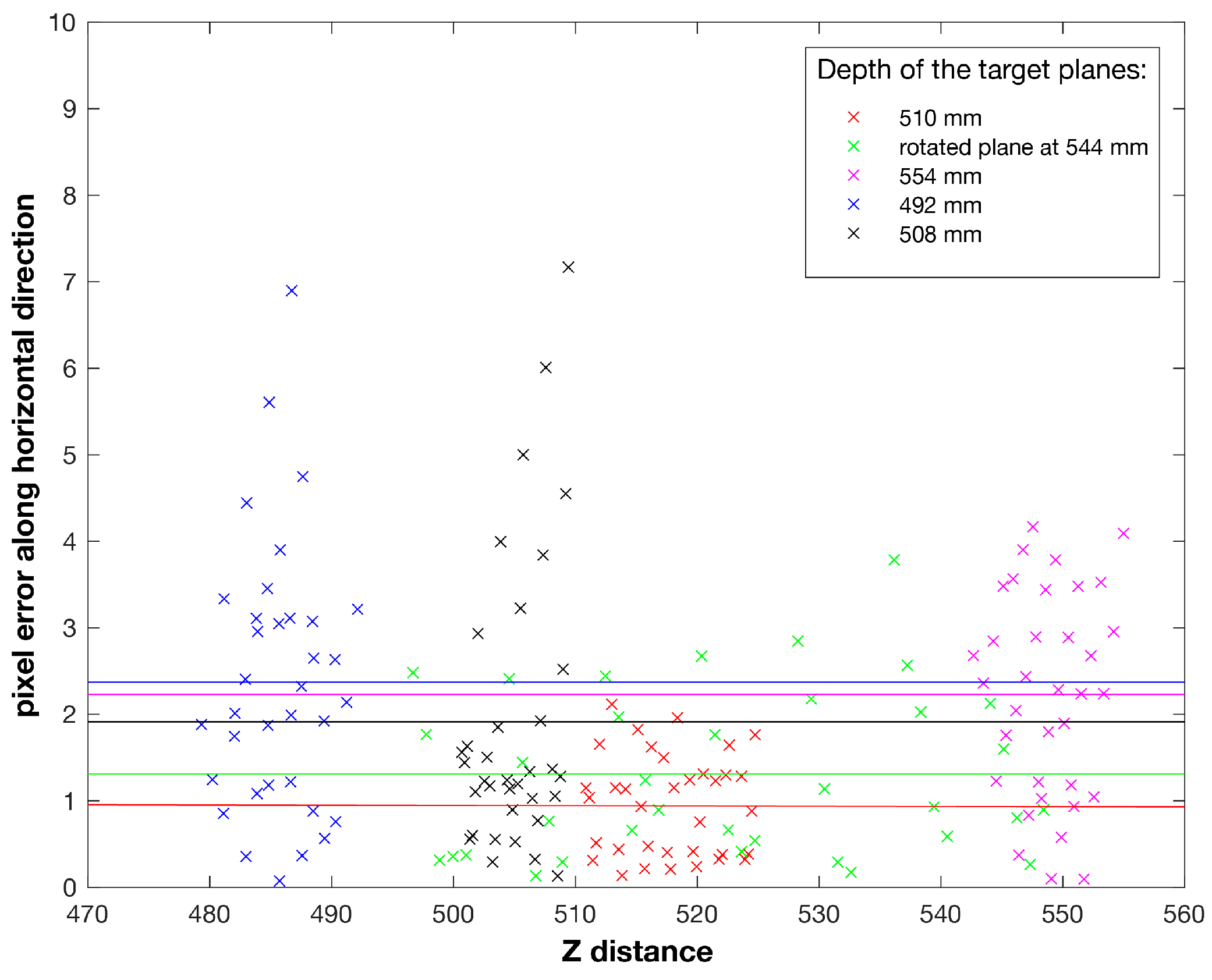
Another aspect to consider is that the distortion of the patterns of binocular horizontal disparities at distances different from the homography plane, is not as severe at the centre of the stereo images, which is where the user normally directs his own view. Further, even if the vertical monoscopic disparities follow a steeper trend as the distance from the homography plane increases, we believe that their effect onto the perception of relative depths is not as evident, also considering that their combinatory effect is likely to be null.
In conclusion, the quasi-orthoscopic setting of the HMD and the user-specific homography, refined to embody the effects of the intrinsic parameters of the displays and of the non-ideal eyes placement in the HMD, are sufficient to recover a proper perception of relative depths in the personal space. Further, we can assert that the actual density of homographies that ensures a non-perceptible distortion of the visual space in the personal space can be sparser than the ideal pattern retrieved by estimating the trend of the stereoacuities of the HMD.
All of this suggests that we should investigate whether display calibration and eye-tracking can allow the achievement of similar results without the need for a user-specific homography refinement. Display calibration would in fact provide a proper estimation of the linear and non-linear projective parameters of the display, while eye-tracking would yield a robust and reliable estimation of the eyes position.
It is important to outline that the results of our perceptual tests can be considered as a preliminary proof of effectiveness of the proposed solution in recovering natural depth perception in a quasi-orthoscopic VST HMD. In addition, the testing platform herein used strongly encourages us to conducting structured user-studies involving more subjects and aimed at investigating further on how our solution can be of help to the VR and AR communities for investigations relative to user’s perception and task achievement efficiency, hence in fields as human-computer interaction, neuroscience and human factor in computing systems.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}