A Taxonomy in Robot-Assisted Training: Current Trends, Needs and Challenges †


 ,
,
Abstract
:1. Introduction
2. A Review of Robot-Assisted Training Systems
2.1. Application Areas
2.2. Robot Perception and Behavior Control
3. Related Taxonomies in HRI
4. A Taxonomy for Robot-Assisted Training Systems
4.1. Task Type and Requirements
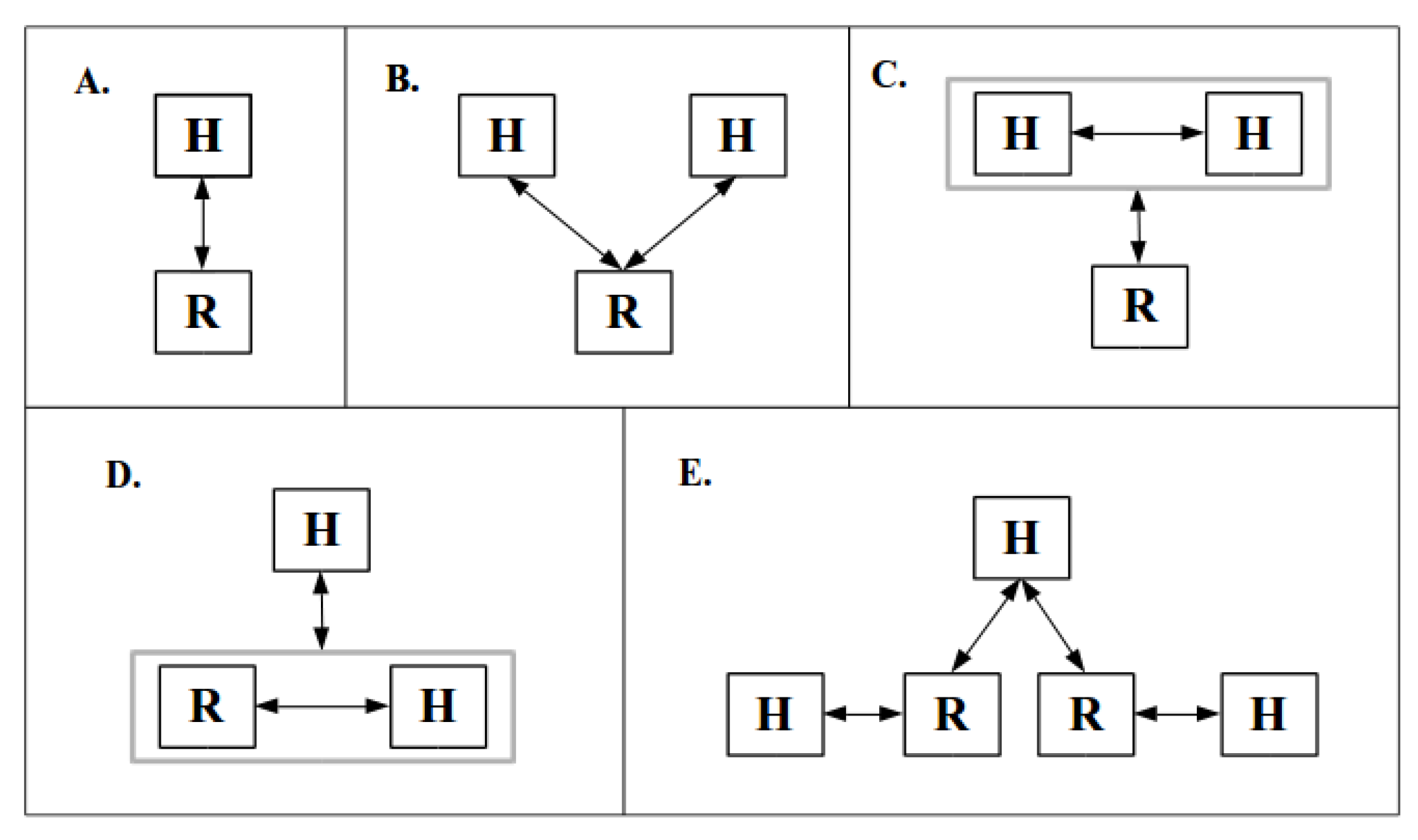
4.2. Interaction Types and Roles
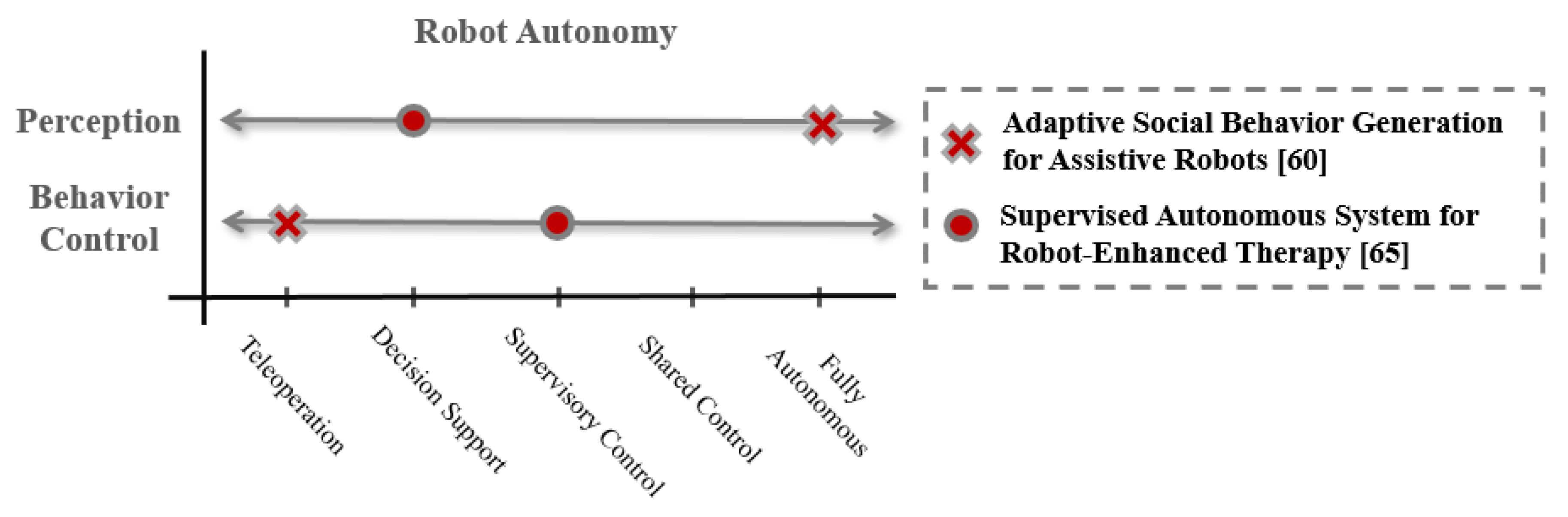
4.3. Level of Autonomy and Learning
4.4. Personalization Dimensions
5. Conclusions and Open Challenges
- Perceiving and understanding user needs, focusing on techniques and approaches to enable an intuitive and non-intrusive interaction between the user and the system, maximizing user’s compliance, based on the different user types and roles and their participation in the personalization procedure,
- Improvement of system self-awareness, in terms of perception, interpretation, reasoning, decision making, and learning. The system must be able to self-assess its functionality on different levels in order to prevent inappropriate interactions, e.g., notify if involvement of a human supervisor is required,
- Improvement of system adaptation and personalization based on the perceived behavioral, cognitive and emotional states of the user(s), the task needs and the context of the interaction. The system must be able to know when and how to personalize its behavior with respect to appropriate evaluation metrics.
Author Contributions
Funding
Conflicts of Interest
References
- Gandolfi, M.; Geroin, C.; Waldner, A.; Maddalena, I.; Dimitrova, E.; Picelli, A.; Smania, N.; Tomelleri, C. Feasibility and safety of early lower limb robot-assisted training in sub-acute stroke patients: A pilot study. Eur. J. Phys. Rehabil. Med. 2017, 53, 870–882. [Google Scholar] [PubMed]
- Stroppa, F.; Loconsole, C.; Marcheschi, S.; Frisoli, A. A Robot-Assisted Neuro-Rehabilitation System for Post-Stroke Patients’ Motor Skill Evaluation with ALEx Exoskeleton. In Converging Clinical and Engineering Research on Neurorehabilitation II; Springer: Berlin/Heidelberg, Germany, 2017; pp. 501–505. [Google Scholar]
- Wada, K.; Shibata, T.; Musha, T.; Kimura, S. Robot therapy for elders affected by dementia. IEEE Eng. Med. Biol. Mag. 2008, 27, 53–60. [Google Scholar] [CrossRef]
- Jøranson, N.; Pedersen, I.; Rokstad, A.M.M.; Ihlebæk, C. Effects on symptoms of agitation and depression in persons with dementia participating in robot-assisted activity: A cluster-randomized controlled trial. J. Am. Med. Direct. Assoc. 2015, 16, 867–873. [Google Scholar] [CrossRef] [PubMed]
- Scassellati, B.; Admoni, H.; Matarić, M. Robots for use in autism research. Ann. Rev. Biomed. Eng. 2012, 14, 275–294. [Google Scholar] [CrossRef] [PubMed]
- Bharatharaj, J.; Huang, L.; Mohan, R.E.; Al-Jumaily, A.; Krägeloh, C. Robot-assisted therapy for learning and social interaction of children with autism spectrum disorder. Robotics 2017, 6, 4. [Google Scholar] [CrossRef]
- Lee, J.; Takehashi, H.; Nagai, C.; Obinata, G.; Stefanov, D. Which robot features can stimulate better responses from children with autism in robot-assisted therapy? Int. J. Adv. Robot. Syst. 2012, 9, 72. [Google Scholar] [CrossRef]
- Lee, S.; Noh, H.; Lee, J.; Lee, K.; Lee, G.G.; Sagong, S.; Kim, M. On the effectiveness of robot-assisted language learning. ReCALL 2011, 23, 25–58. [Google Scholar] [CrossRef]
- Han, J. Emerging technologies: Robot assisted language learning. Lang. Learn. Technol. 2012, 16, 1–9. [Google Scholar]
- Clabaugh, C.; Ragusa, G.; Sha, F.; Matarić, M. Designing a socially assistive robot for personalized number concepts learning in preschool children. In Proceedings of the 2015 Joint IEEE International Conference on Development and Learning and Epigenetic Robotics (ICDL-EpiRob), Providence, RI, USA, 13–16 August 2015; pp. 314–319. [Google Scholar]
- Varrasi, S.; Di Nuovo, S.; Conti, D.; Di Nuovo, A. A social robot for cognitive assessment. In Proceedings of the Companion of the 2018 ACM/IEEE International Conference on Human–Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 269–270. [Google Scholar]
- Varrasi, S.; Di Nuovo, S.; Conti, D.; Di Nuovo, A. Social robots as psychometric tools for cognitive assessment: A pilot test. In Human Friendly Robotics; Springer: Berlin/Heidelberg, Germany, 2019; pp. 99–112. [Google Scholar]
- Korn, O.; Tso, L.; Papagrigoriou, C.; Sowoidnich, Y.; Konrad, R.; Schmidt, A. Computerized assessment of the skills of impaired and elderly workers: A tool survey and comparative study. In Proceedings of the 9th ACM International Conference on PErvasive Technologies Related to Assistive Environments, Corfu, Greece, 29 June–1 July 2016; p. 50. [Google Scholar]
- Scassellati, B.; Boccanfuso, L.; Huang, C.M.; Mademtzi, M.; Qin, M.; Salomons, N.; Ventola, P.; Shic, F. Improving social skills in children with ASD using a long-term, in-home social robot. Sci. Robot. 2018, 3, eaat7544. [Google Scholar] [CrossRef]
- Raya, R.; Rocon, E.; Urendes, E.; Velasco, M.A.; Clemotte, A.; Ceres, R. Assistive robots for physical and cognitive rehabilitation in cerebral palsy. In Intelligent Assistive Robots; Springer: Berlin/Heidelberg, Germany, 2015; pp. 133–156. [Google Scholar]
- Belpaeme, T.; Kennedy, J.; Ramachandran, A.; Scassellati, B.; Tanaka, F. Social robots for education: A review. Sci. Robot. 2018, 3, eaat5954. [Google Scholar] [CrossRef]
- Konijn, E.; Hoorn, J. Humanoid Robot Tutors Times Tables: Does Robot’s Social Behavior Match Pupils’ Educational Ability? IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Saerbeck, M.; Schut, T.; Bartneck, C.; Janse, M.D. Expressive robots in education: Varying the degree of social supportive behavior of a robotic tutor. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Atlanta, GA, USA, 10–15 April 2010; pp. 1613–1622. [Google Scholar]
- Gordon, G.; Spaulding, S.; Westlund, J.K.; Lee, J.J.; Plummer, L.; Martinez, M.; Das, M.; Breazeal, C. Affective Personalization of a Social Robot Tutor for Children’s Second Language Skills. In Proceedings of the AAAI, Phoenix, AZ, USA, 12–17 February 2016; pp. 3951–3957. [Google Scholar]
- Peters, R.; Broekens, J.; Neerincx, M.A. Robots educate in style: The effect of context and non-verbal behaviour on children’s perceptions of warmth and competence. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August–1 September 2017; pp. 449–455. [Google Scholar]
- Wada, K.; Shibata, T. Robot therapy in a care house-results of case studies. In Proceedings of the 15th IEEE International Symposium on Robot and Human Interactive Communication, Hatfield, UK, 6–8 September 2006; pp. 581–586. [Google Scholar]
- Bharatharaj, J.; Huang, L.; Al-Jumaily, A.; Elara, M.R.; Krägeloh, C. Investigating the Effects of Robot-Assisted Therapy among Children with Autism Spectrum Disorder using Bio-markers. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2017; Volume 234, p. 012017. [Google Scholar]
- Marchal-Crespo, L.; Reinkensmeyer, D.J. Review of control strategies for robotic movement training after neurologic injury. J. Neuroeng. Rehabil. 2009, 6, 20. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Riener, R.; Lünenburger, L.; Maier, I.C.; Colombo, G.; Dietz, V. Locomotor training in subjects with sensori-motor deficits: An overview of the robotic gait orthosis lokomat. J. Healthc. Eng. 2010, 1, 197–216. [Google Scholar] [CrossRef]
- Jung, J.H.; Lee, N.G.; You, J.H.; Lee, D.C. Validity and feasibility of intelligent Walkbot system. Electron. Lett. 2009, 45, 1016–1017. [Google Scholar] [CrossRef]
- Dundar, U.; Toktas, H.; Solak, O.; Ulasli, A.; Eroglu, S. A comparative study of conventional physiotherapy versus robotic training combined with physiotherapy in patients with stroke. Top. Stroke Rehabil. 2014, 21, 453–461. [Google Scholar] [CrossRef] [PubMed]
- Tong, R.K.; Leung, W.W.; Hu, X.; Song, R. Interactive robot-assisted training system using continuous EMG signals for stroke rehabilitation. In Proceedings of the 3rd International Convention on Rehabilitation Engineering & Assistive Technology, Singapore, 22–26 April 2009; p. 20. [Google Scholar]
- De Santis, D.; Zenzeri, J.; Casadio, M.; Masia, L.; Riva, A.; Morasso, P.; Squeri, V. Robot-assisted training of the kinesthetic sense: Enhancing proprioception after stroke. Front. Hum. Neurosci. 2015, 8, 1037. [Google Scholar] [CrossRef]
- Morone, G.; Paolucci, S.; Cherubini, A.; De Angelis, D.; Venturiero, V.; Coiro, P.; Iosa, M. Robot-assisted gait training for stroke patients: Current state of the art and perspectives of robotics. Neuropsychiatr. Dis. Treat. 2017, 13, 1303. [Google Scholar] [CrossRef] [PubMed]
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A survey on robotic devices for upper limb rehabilitation. J. Neuroeng. Rehabil. 2014, 11, 3. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chang, W.H.; Kim, Y.H. Robot-assisted therapy in stroke rehabilitation. J. Stroke 2013, 15, 174. [Google Scholar] [CrossRef] [PubMed]
- Schwartz, I.; Meiner, Z. Robotic-assisted gait training in neurological patients: Who may benefit? Ann. Biomed. Eng. 2015, 43, 1260–1269. [Google Scholar] [CrossRef] [PubMed]
- Veerbeek, J.M.; Langbroek-Amersfoort, A.C.; Van Wegen, E.E.; Meskers, C.G.; Kwakkel, G. Effects of robot-assisted therapy for the upper limb after stroke: A systematic review and meta-analysis. Neurorehabil. Neural Repair 2017, 31, 107–121. [Google Scholar] [CrossRef]
- Chetouani, M.; Boucenna, S.; Chaby, L.; Plaza, M.; Cohen, D.; Chaby, L.; Luherne-du Boullay, V.; Chetouani, M.; Plaza, M.; Templier, L.; et al. Social Signal Processing and Socially Assistive Robotics in Developmental Disorders. In Social Signal Processing; Cambrige University Press: Cambrige, UK, 2017; p. 389. [Google Scholar]
- Spaulding, S.; Chen, H.; Ali, S.; Kulinski, M.; Breazeal, C. A Social Robot System for Modeling Children’s Word Pronunciation: Socially Interactive Agents Track. In Proceedings of the 17th International Conference on Autonomous Agents and MultiAgent Systems, Stockholm, Sweden, 10–15 July 2018; pp. 1658–1666. [Google Scholar]
- Fan, J.; Bian, D.; Zheng, Z.; Beuscher, L.; Newhouse, P.A.; Mion, L.C.; Sarkar, N. A Robotic Coach Architecture for Elder Care (ROCARE) based on multi-user engagement models. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1153–1163. [Google Scholar] [CrossRef] [PubMed]
- Cominelli, L.; Carbonaro, N.; Mazzei, D.; Garofalo, R.; Tognetti, A.; De Rossi, D. A multimodal perception framework for users emotional state assessment in social robotics. Futur. Internet 2017, 9, 42. [Google Scholar] [CrossRef]
- Simonetti, D.; Zollo, L.; Papaleo, E.; Carpino, G.; Guglielmelli, E. Multimodal adaptive interfaces for 3D robot-mediated upper limb neuro-rehabilitation: An overview of bio-cooperative systems. Robot. Auton. Syst. 2016, 85, 62–72. [Google Scholar] [CrossRef]
- Korn, O.; Stamm, L.; Moeckl, G. Designing Authentic Emotions for Non-Human Characters: A Study Evaluating Virtual Affective Behavior. In Proceedings of the 2017 Conference on Designing Interactive Systems, Edinburgh, UK, 10–14 June 2017; pp. 477–487. [Google Scholar]
- Feng, Y.; Jia, Q.; Wei, W. A Control Architecture of Robot-Assisted Intervention for Children with Autism Spectrum Disorders. J. Robot. 2018, 2018. [Google Scholar] [CrossRef]
- Trafton, J.G.; Hiatt, L.M.; Harrison, A.M.; Tamborello, F.P., II; Khemlani, S.S.; Schultz, A.C. Act-r/e: An embodied cognitive architecture for human–robot interaction. J. Hum.-Robot Interact. 2013, 2, 30–55. [Google Scholar] [CrossRef]
- Cao, H.L.; Van de Perre, G.; Kennedy, J.; Senft, E.; Esteban, P.G.; De Beir, A.; Simut, R.; Belpaeme, T.; Lefeber, D.; Vanderborght, B. A personalized and platform-independent behavior control system for social robots in therapy: Development and applications. IEEE Trans. Cognit. Dev. Syst. 2018. [Google Scholar] [CrossRef]
- Müller, S.; Bergande, B.; Brune, P. Robot Tutoring: On the Feasibility of Using Cognitive Systems as Tutors in Introductory Programming Education: A Teaching Experiment. In Proceedings of the 3rd European Conference of Software Engineering Education, Bavaria, Germany, 14–15 June 2018; pp. 45–49. [Google Scholar]
- Ziafati, P.; Lera, F.; Costa, A.; Nazarikhorram, A.; Van Der Torre, L.; Nazarikhor, A. ProCRob Architecture for Personalized Social Robotics. Presented at the Robots for Learning Workshop @ HRI 2017, Vienna, Austria, 6–9 March 2017; Available online: https://r4l.epfl.ch/wp-content/uploads/2018/09/R4L_HRI_2017_paper_9.pdf (accessed on 9 December 2018).
- Galindo, C.; Gonzalez, J.; Fernández-Madrigal, J. An architecture for cognitive human–robot integration. Application to rehabilitation robotics. In Proceedings of the 2005 IEEE International Conference on Mechatronics and Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005; Volume 1, pp. 329–334. [Google Scholar]
- Yanco, H.A.; Drury, J.L. A taxonomy for human–robot interaction. In Proceedings of the AAAI Fall Symposium on Human–Robot Interaction, North Falmouth, MA, USA, 15–17 November 2002; pp. 111–119. [Google Scholar]
- Yanco, H.A.; Drury, J. Classifying human–robot interaction: An updated taxonomy. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, 10–13 October 2004; Volume 3, pp. 2841–2846. [Google Scholar]
- Scholtz, J. Theory and evaluation of human–robot interactions. In Proceedings of the 36th Annual Hawaii International Conference on System Sciences, Big Island, HI, USA, 6–9 January 2003. [Google Scholar]
- Goodrich, M.A.; Schultz, A.C. Human-robot interaction: A survey. Found. Trends Hum.-Comput. Interact. 2007, 1, 203–275. [Google Scholar] [CrossRef]
- Lyons, J.B.; Havig, P.R. Transparency in a human–machine context: Approaches for fostering shared awareness/intent. In International Conference on Virtual, Augmented and Mixed Reality; Springer: Berlin/Heidelberg, Germany, 2014; pp. 181–190. [Google Scholar]
- Drury, J.L.; Scholtz, J.; Yanco, H.A. Awareness in human–robot interactions. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Washington, DC, USA, 8 October 2003; Volume 1, pp. 912–918. [Google Scholar]
- Tapus, A.; Ţăpuş, C.; Matarić, M.J. User-robot personality matching and assistive robot behavior adaptation for post-stroke rehabilitation therapy. Intell. Serv. Robot. 2008, 1, 169–183. [Google Scholar] [CrossRef]
- Salter, T.; Michaud, F.; Larouche, H. How wild is wild? A taxonomy to characterize the ‘wildness’ of child–robot interaction. Int. J. Soc. Robot. 2010, 2, 405–415. [Google Scholar] [CrossRef]
- Beer, J.; Fisk, A.D.; Rogers, W.A. Toward a framework for levels of robot autonomy in human–robot interaction. J. Hum.-Robot Interact. 2014, 3, 74. [Google Scholar] [CrossRef] [PubMed]
- Christiernin, L.G. How to Describe Interaction with a Collaborative Robot. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human–Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 93–94. [Google Scholar]
- Hermann, M.; Pentek, T.; Otto, B. Design principles for industrie 4.0 scenarios. In Proceedings of the 2016 49th Hawaii International Conference on System Sciences (HICSS), Koloa, HI, USA, 5–8 January 2016; pp. 3928–3937. [Google Scholar]
- Zollo, L.; Wada, K.; Van der Loos, H.M. Special issue on assistive robotics [from the guest editors]. IEEE Robot. Autom. Mag. 2013, 20, 16–19. [Google Scholar] [CrossRef]
- Kan, P.; Huq, R.; Hoey, J.; Goetschalckx, R.; Mihailidis, A. The development of an adaptive upper-limb stroke rehabilitation robotic system. J. Neuroeng. Rehabil. 2011, 8, 33. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Andrade, K.; Fernandes, G.; Caurin, G.; Siqueira, A.; Romero, R.; Pereira, R. Dynamic player modelling in serious games applied to rehabilitation robotics. In Proceedings of the SBR-LARS Robotics Symposium and Robocontrol, Sao Carlos, Brazil, 18–23 October 2014; pp. 211–216. [Google Scholar]
- Hemminghaus, J.; Kopp, S. Towards adaptive social behavior generation for assistive robots using reinforcement learning. In Proceedings of the 2017 ACM/IEEE International Conference on Human–Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 332–340. [Google Scholar]
- Magyar, G.; Vircikova, M. Socially-Assistive Emotional Robot that Learns from the Wizard During the Interaction for Preventing Low Back Pain in Children. In International Conference on Social Robotics; Springer: Berlin/Heidelberg, Germany, 2015; pp. 411–420. [Google Scholar]
- Gao, Y.; Barendregt, W.; Obaid, M.; Castellano, G. When robot personalisation does not help: Insights from a robot-supported learning study. In Proceedings of the Robot and Human Interactive Communication, Tai’an, China, 27 August–1 September 2018. [Google Scholar]
- Al Moubayed, S.; Beskow, J.; Skantze, G.; Granström, B. Furhat: A back-projected human-like robot head for multiparty human–machine interaction. In Cognitive Behavioural Systems; Springer: Berlin/Heidelberg, Germany, 2012; pp. 114–130. [Google Scholar]
- Short, E.; Mataric, M.J. Robot moderation of a collaborative game: Towards socially assistive robotics in group interactions. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August–1 September 2017; pp. 385–390. [Google Scholar]
- Alsos, O.A.; Svanæs, D. Designing for the secondary user experience. In IFIP Conference on Human-Computer Interaction; Springer: Berlin/Heidelberg, Germany, 2011; pp. 84–91. [Google Scholar]
- Senft, E.; Baxter, P.; Kennedy, J.; Belpaeme, T. Sparc: Supervised progressively autonomous robot competencies. In International Conference on Social Robotics; Springer: Berlin/Heidelberg, Germany, 2015; pp. 603–612. [Google Scholar]
- Matsas, E.; Vosniakos, G.C. Design of a virtual reality training system for human–robot collaboration in manufacturing tasks. Int. J. Interact. Des. Manuf. 2017, 11, 139–153. [Google Scholar] [CrossRef]
- Esteban, P.G.; Baxter, P.; Belpaeme, T.; Billing, E.; Cai, H.; Cao, H.L.; Coeckelbergh, M.; Costescu, C.; David, D.; De Beir, A.; et al. How to build a supervised autonomous system for robot-enhanced therapy for children with autism spectrum disorder. Paladyn J. Behav. Robot. 2017, 8, 18–38. [Google Scholar] [CrossRef]
- Cuayáhuitl, H.; van Otterlo, M.; Dethlefs, N.; Frommberger, L. Machine learning for interactive systems and robots: a brief introduction. In Proceedings of the 2nd Workshop on Machine Learning for Interactive Systems: Bridging the Gap Between Perception, Action and Communication, Beijing, China, 3–4 August 2013; pp. 19–28. [Google Scholar]
- Bloom, B.S. The 2 sigma problem: The search for methods of group instruction as effective as one-to-one tutoring. Educ. Res. 1984, 13, 4–16. [Google Scholar] [CrossRef]
- Kupcsik, A.; Hsu, D.; Lee, W.S. Learning dynamic robot-to-human object handover from human feedback. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2018; pp. 161–176. [Google Scholar]
- Yakub, F.; Khudzari, A.Z.M.; Mori, Y. Recent trends for practical rehabilitation robotics, current challenges and the future. Int. J. Rehabil. Res. 2014, 37, 9–21. [Google Scholar] [CrossRef] [PubMed]
- Korn, O.; Bieber, G.; Fron, C. Perspectives on Social Robots: From the Historic Background to an Experts’ View on Future Developments. In Proceedings of the 11th PErvasive Technologies Related to Assistive Environments Conference, Corfu, Greece, 26–29 June 2018; pp. 186–193. [Google Scholar]
- Odette, K.; Rivera, J.; Phillips, E.K.; Jentsch, F. Robot Self-Assessment and Expression: A Learning Framework. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; SAGE Publications Sage CA: Los Angeles, CA, USA, 2017; Volume 61, pp. 1188–1192. [Google Scholar]
- Li, G.; Hung, H.; Whiteson, S.; Knox, W.B. Using informative behavior to increase engagement in the tamer framework. In Proceedings of the 2013 International Conference on Autonomous Agents and Multi-Agent Systems, St. Paul, MN, USA, 6–10 May 2013; pp. 909–916. [Google Scholar]
- Zehfroosh, A.; Kokkoni, E.; Tanner, H.G.; Heinz, J. Learning models of Human–Robot Interaction from small data. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; Volume 2017, p. 223. [Google Scholar]
- Spaulding, S. Personalized Robot Tutors that Learn from Multimodal Data. In Proceedings of the 17th International Conference on Autonomous Agents and MultiAgent Systems, Stockholm, Sweden, 10–15 July 2018; pp. 1781–1783. [Google Scholar]
- Ahmad, M.; Mubin, O.; Orlando, J. A systematic review of adaptivity in human–robot interaction. Multimodal Technol. Interact. 2017, 1, 14. [Google Scholar] [CrossRef]
- Ahmad, M.I.; Mubin, O.; Orlando, J. Adaptive social robot for sustaining social engagement during long-term children–robot interaction. Int. J. Hum.–Comput. Interact. 2017, 33, 943–962. [Google Scholar] [CrossRef]
- Alami, R.; Albu-Schäffer, A.; Bicchi, A.; Bischoff, R.; Chatila, R.; De Luca, A.; De Santis, A.; Giralt, G.; Guiochet, J.; Hirzinger, G.; et al. Safe and dependable physical human–robot interaction in anthropic domains: State of the art and challenges. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1–16. [Google Scholar]
- Bicchi, A.; Peshkin, M.A.; Colgate, J.E. Safety for physical human–robot interaction. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1335–1348. [Google Scholar]
- Lasota, P.A.; Fong, T.; Shah, J.A. A survey of methods for safe human–robot interaction. Found. Trends Robot. 2017, 5, 261–349. [Google Scholar] [CrossRef]
- Vircikova, M.; Magyar, G.; Sincak, P. The Affective Loop: A Tool for Autonomous and Adaptive Emotional Human–Robot Interaction. In Robot Intelligence Technology and Applications 3; Springer: Berlin/Heidelberg, Germany, 2015; pp. 247–254. [Google Scholar]
- Castillo, J.C.; Castro-González, Á.; Alonso-Martín, F.; Fernández-Caballero, A.; Salichs, M.Á. Emotion detection and regulation from personal assistant robot in smart environment. In Personal Assistants: Emerging Computational Technologies; Springer: Berlin/Heidelberg, Germany, 2018; pp. 179–195. [Google Scholar]
- Liu, X.; Xie, L.; Liu, A.; Li, D. Cognitive emotional regulation model in human–robot interaction. Discret. Dyn. Nat. Soc. 2015, 2015, 829387. [Google Scholar] [CrossRef]
- Kennedy, J.; Baxter, P.; Belpaeme, T. Can less be more? The impact of robot social behaviour on human learning. In Proceedings of the 4th International Symposium on New Frontiers in HRI at AISB, Canterbury, UK, 21–22 April 2015. [Google Scholar]
- Steinfeld, A.; Fong, T.; Kaber, D.; Lewis, M.; Scholtz, J.; Schultz, A.; Goodrich, M. Common metrics for human–robot interaction. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human–Robot Interaction, Salt Lake City, UT, USA, 2–3 March 2006; pp. 33–40. [Google Scholar]
- Canny, J. Interactive Machine Learning; University of California: Berkeley, CA, USA, 2014. [Google Scholar]
- Kulik, J.A.; Fletcher, J. Effectiveness of intelligent tutoring systems: A meta-analytic review. Rev. Educ. Res. 2016, 86, 42–78. [Google Scholar] [CrossRef]
- Chrysafiadi, K.; Virvou, M. Student modeling approaches: A literature review for the last decade. Expert Syst. Appl. 2013, 40, 4715–4729. [Google Scholar] [CrossRef]
- Su, S.H.; Lin, H.C.K.; Wang, C.H.; Huang, Z.C. Multi-Modal Affective Computing Technology Design the Interaction between Computers and Human of Intelligent Tutoring Systems. Int. J. Online Pedagog. Course Des. 2016, 6, 13–28. [Google Scholar] [CrossRef]
- Ray, L. Cyber-Physical Systems. In Handbook of Research on Applied Cybernetics and Systems Science; IGI Global: Hershey, PA, USA, 2017; p. 335. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| System Requirements | Interaction Type | Human Roles | Spatio-Temporal |
|---|---|---|---|
| Task Type | Ratio of People to Robots | Human Interaction Roles | Time–Space Taxonomy |
| Task Criticality | Level of Shared Interaction Among Teams | Decision Support for Operators | Human–Robot Physical Proximity |
| Robot Morphology | Composition of Robot Teams | Level of Autonomy-Amount of Intervention |
| Task Type and Requirements | Interaction Types and Roles | Level of Autonomy and Learning | Personalization Dimensions |
|---|---|---|---|
| Socially Assistive Robotics (SAR) for Language Learning with Children [19] | A social robot acts as an affective tutor during a language learning game | The robot acts fully autonomously and learns using Reinforcement Learning | The robot adjusts its engagement and valence during verbal instructions |
| SAR-based system for Post Stroke Rehabilitation for Elderly Patients [52] | The robot therapist monitors, assists and encourages users during rehabilitation | The robot acts fully autonomously and personalizes its policy using Policy Gradient RL | The robot adjusts its therapy style, speed and proxemics based on user progress |
| Robot-Based Rehabilitation using Serious Games and Haptic device [59] | The user performs a reaching task using a robotic haptic device | The robot acts autonomously and learns through RL | The system adjusts the game parameters to challenge the user |
| Adaptive Upper-Limb Rehabilitation using a Haptic Device [58] | The robotic arm trains the user in a reaching task. A supervisor monitors system’s decisions | The robot acts autonomously based on a given policy (no learning); an expert can alter the action | The system decides reaching target, resistance level of resistance, or when the task should stop |
| Social Robot for Attention Acquisition during a Memory Game [60] | The robot acts as a tutor who guides user’s attention during a memory game, in a WoZ setup | The system acts semi-autonomously. A supervisor provides RL with user state to select gestures | The robot learns the appropriate gesture combination to increase user attention |
| Physical Exercising for Children using a Social Robot and Wizard-of-Oz Interfaces [61] | The robot shows the exercises to be performed. A supervisor can control the robot | The system acts in a semi-autonomous manner. The robot learns from human input | The robot personalizes the exercise regimen according to exercise performance and compliance |
| EMG-Controlled Interactive Robot for Upper Limb Training [27] | The robot guides the user during the training tasks through assistive torques and a Graphical User Interface | The system records and analyzes EMG signals and generates a control signal to provide assistive forces | The system adjusts the assistive forces based on real-time continuous EMG to improve task performance |
| Social Robotic Tutor for Grid-based Puzzle Solving [62] | A social robot provides supportive behavior to help the user solve the puzzle | The robot acts fully autonomously and uses an RL framework to learn personalized policies | The robot observes user progress and selects a supportive behavior to maximize performance and engagement |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsiakas, K.; Kyrarini, M.; Karkaletsis, V.; Makedon, F.; Korn, O. A Taxonomy in Robot-Assisted Training: Current Trends, Needs and Challenges. Technologies 2018, 6, 119. https://doi.org/10.3390/technologies6040119
Tsiakas K, Kyrarini M, Karkaletsis V, Makedon F, Korn O. A Taxonomy in Robot-Assisted Training: Current Trends, Needs and Challenges. Technologies. 2018; 6(4):119. https://doi.org/10.3390/technologies6040119
Chicago/Turabian StyleTsiakas, Konstantinos, Maria Kyrarini, Vangelis Karkaletsis, Fillia Makedon, and Oliver Korn. 2018. "A Taxonomy in Robot-Assisted Training: Current Trends, Needs and Challenges" Technologies 6, no. 4: 119. https://doi.org/10.3390/technologies6040119
APA StyleTsiakas, K., Kyrarini, M., Karkaletsis, V., Makedon, F., & Korn, O. (2018). A Taxonomy in Robot-Assisted Training: Current Trends, Needs and Challenges. Technologies, 6(4), 119. https://doi.org/10.3390/technologies6040119