Autonomous Smart White Cane Navigation System for Indoor Usage




Abstract
:1. Introduction
2. Related Study
Previously Proposed Smart Cane
- Ergonomic grip for comfortable holding and cane tapping: Smart Cane provides different gripping styles that allow users to use their natural way of holding cane.
- Built-in rechargeable battery with a long battery back-up: Smart Cane is easily charge-able like a mobile phone. The removal of the battery is not required for/while charging the device.
- Fully accessible user interface: the interface is very friendly where there is varying number of beeps for conveying different messages, i.e., battery low or status of the charging, etc.
- Vibrations are uniformly produced on the entire grip: The Smart Cane provides non-localized vibration feedback for allowing users to grasp/hold the device conveniently.
- Easy attachment/detachment from a white cane: the white cane can easily be replaced by the user himself.
3. Proposed Smart Cane Indoor Navigation System
3.1. Identification of Users’ Requirements
- Help to achieve autonomous navigation;
- Provide safety and comfort in the displacement;
- Provide a companion and a significant vector of communication;
- Help to pick up a fallen object.
- Assist visually impaired people to come to autonomous navigation;
- Providing security and comfort while moving from one place to another;
- Offering a tool that will support them to communication with others;
- Offering a tool that will identify objects within the surrounding environment.
3.2. Main Characteristics of the Proposed System
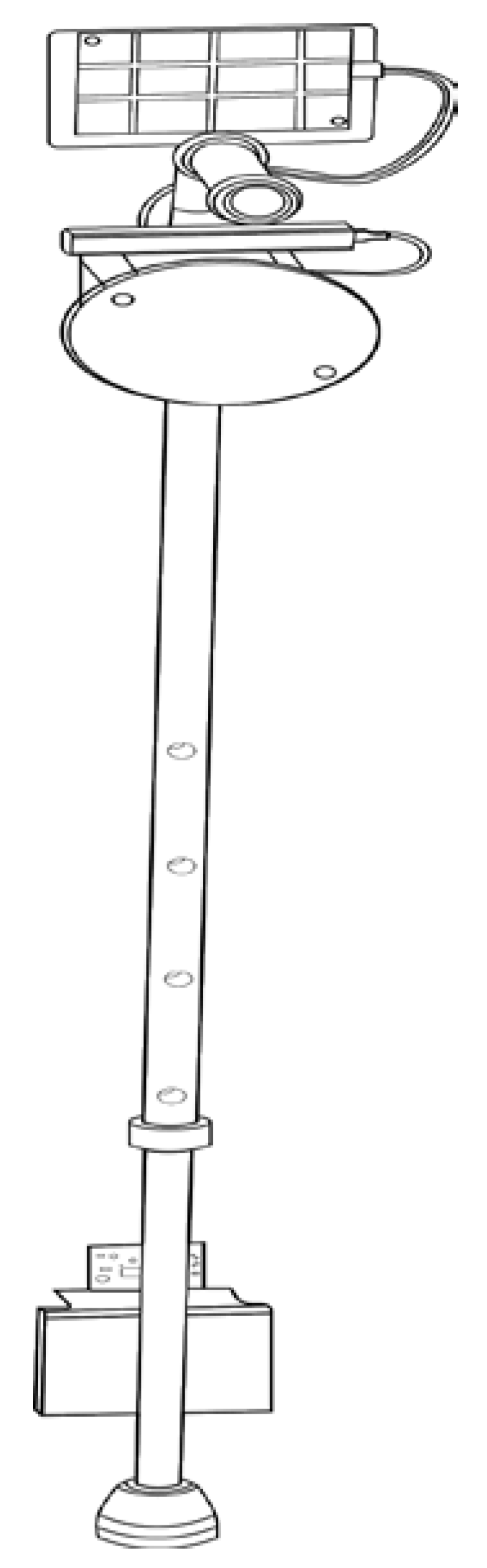
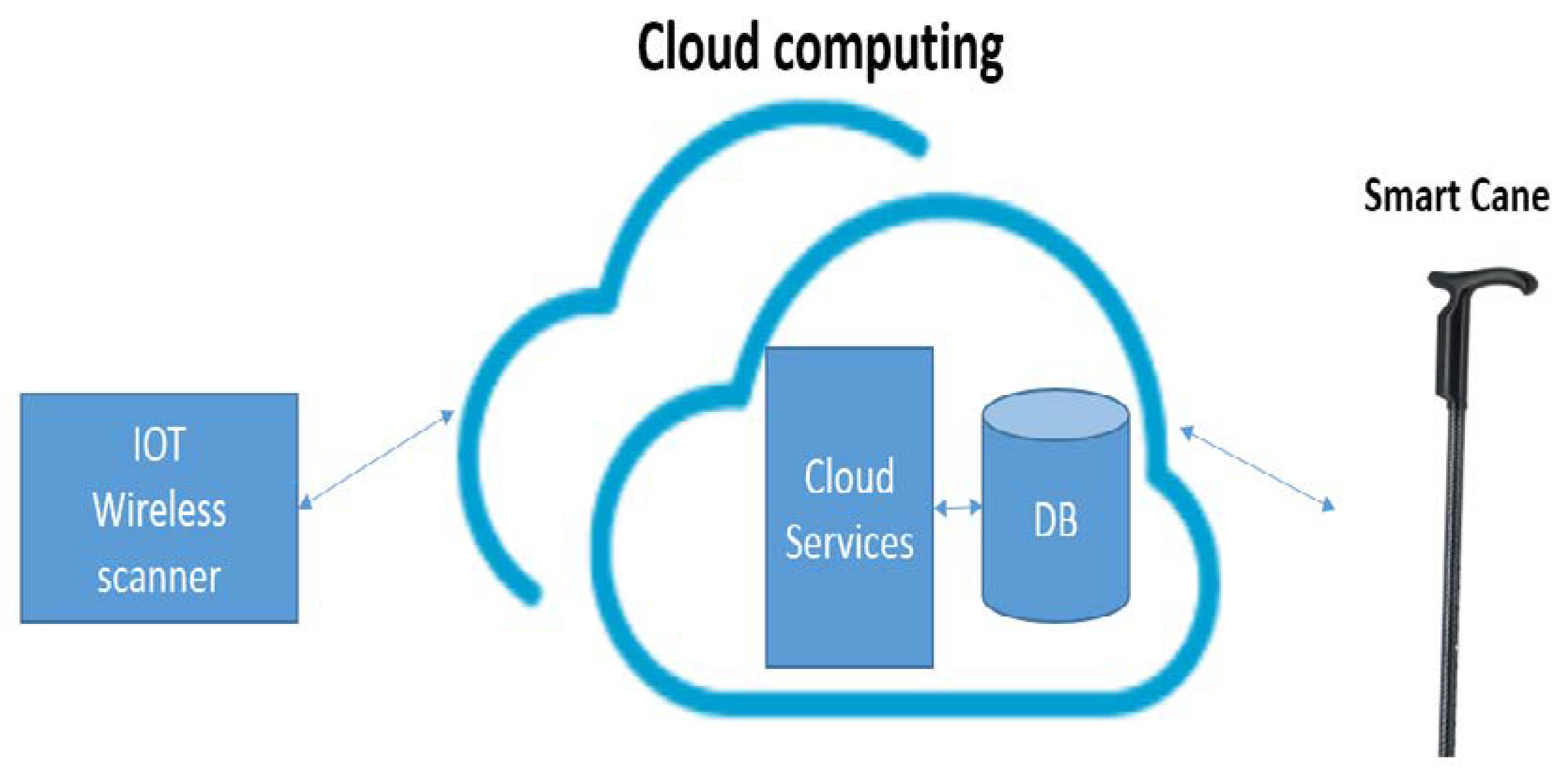
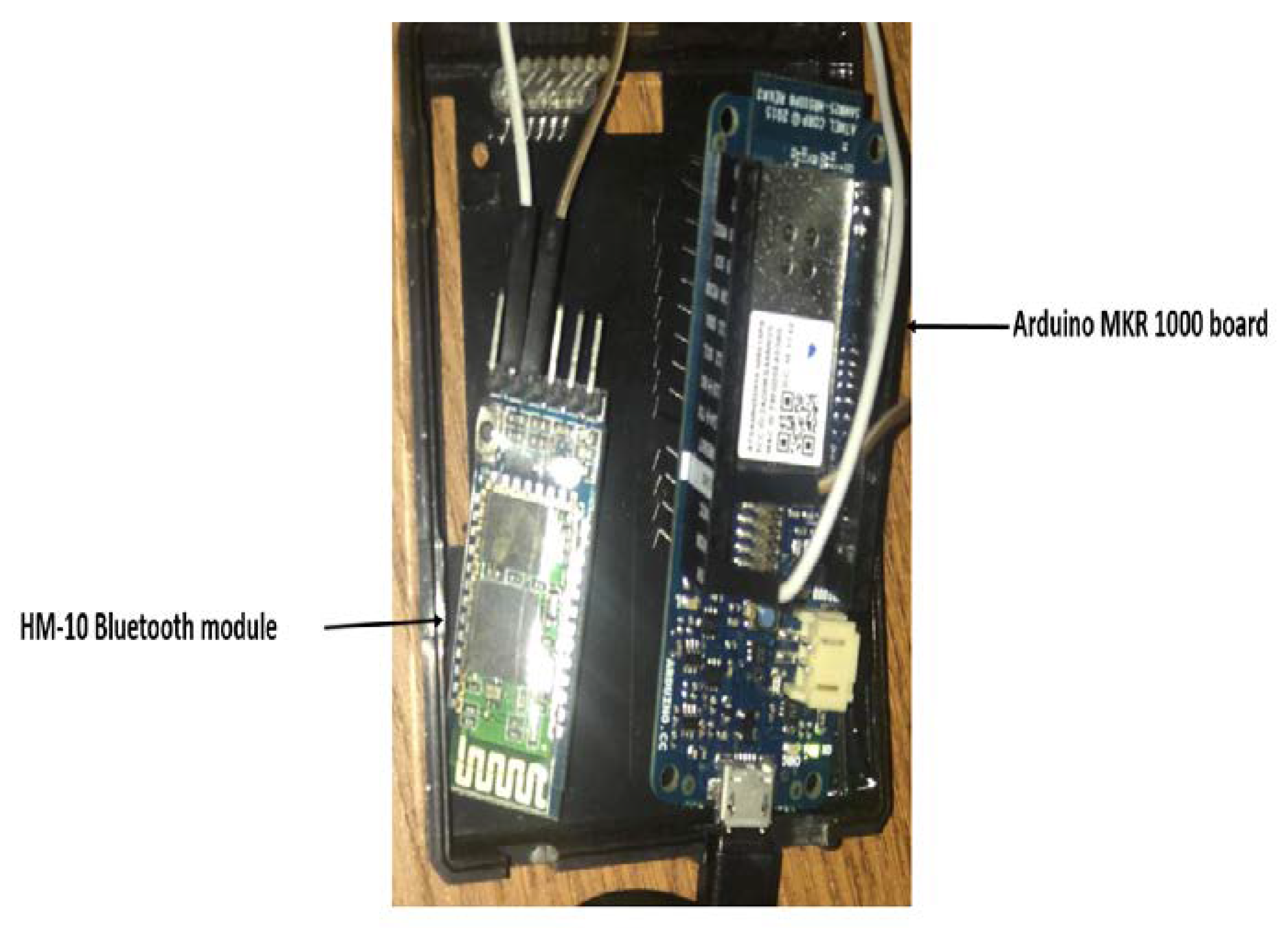
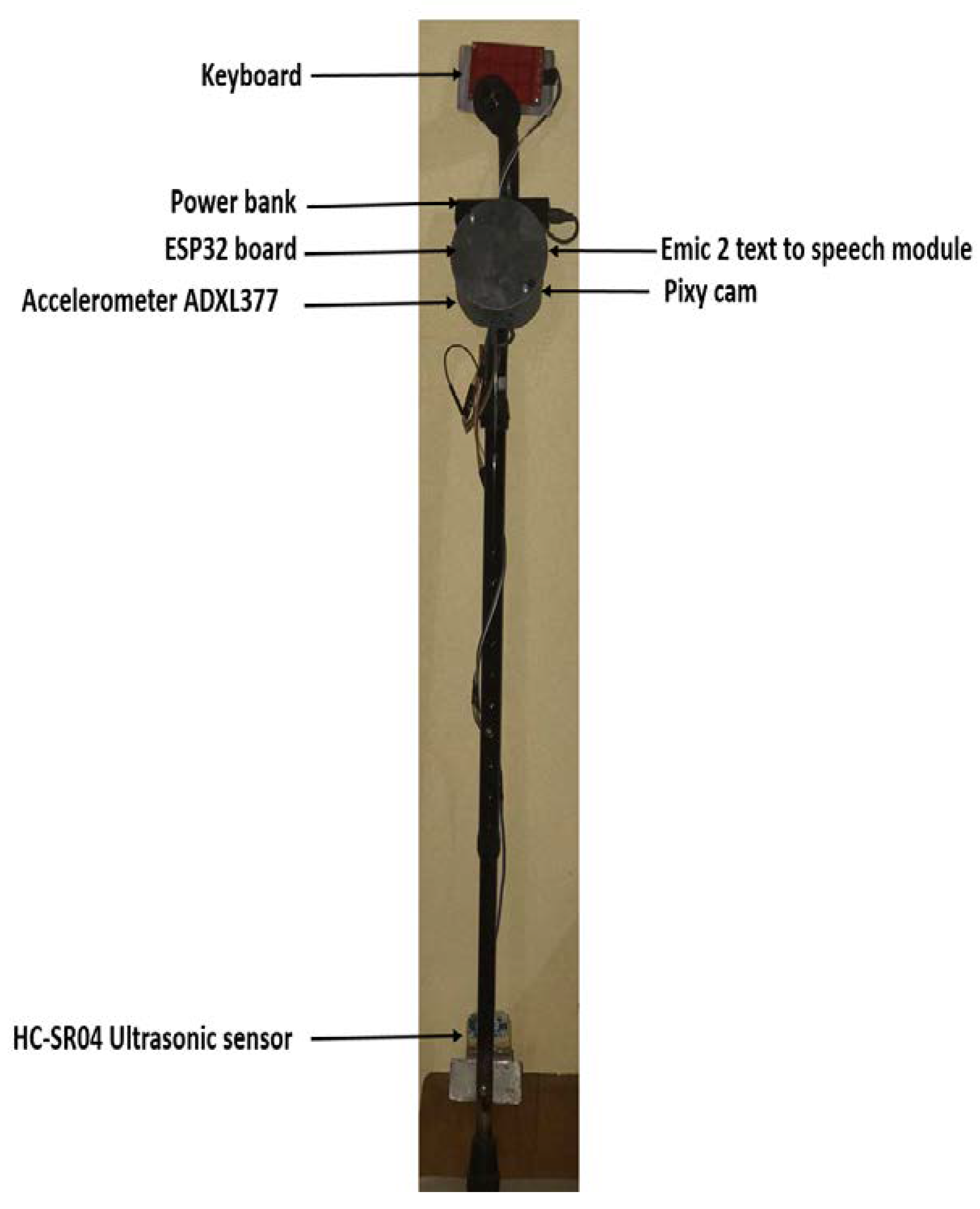
3.3. Detailed Explanation of Proposed System Components
3.4. Triangulation of the Cane and Guidance of the User
3.5. Recognition of Objects Encountered in the Environment
3.6. Determining the Route
- Calculation of the fastest and safest route to arrive at a given point in the environment;
- Proposition of different navigation modes.
3.7. Itinerary Algorithm
| Algorithm 1 |
| function GetSafetyPath(PathLength,NumDev,NumObs): |
| IndDev ← (PathLength\NumDev)\PathLength |
| IndObs ← (PathLength\NumObs)\PathLength |
| Return ((IndDev*30) + (IndObs*70))\100 |
| If: GetSafetyPath >= 80: The Path is Safe |
| If: GetSafetyPath >= 50 AND <80: The Path is normal. |
| Else: The Path is unsafe. |
3.8. Calculate Speed
4. Experiment
4.1. Testing of Indoor Navigation System
4.2. System Performance
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Vision Impairment and Blindness. Who.int, 2018. Available online: https://www.who.int/news-room/fact-sheets/detail/blindness-and-visual-impairment (accessed on 30 April 2020).
- Bourne, R.R.A.; Flaxman, S.R.; Braithwaite, T.; Cicinelli, M.V.; Das, A.; Jonas, J.B.; Keeffe, J.; Kempen, J.H.; Leasher, J.; Limburg, H.; et al. Magnitude, temporal trends, and projections of the global prevalence of blindness and distance and near vision impairment: A systematic review and meta-analysis. Lancet Glob. Health 2017, 5, e888–e897. [Google Scholar] [CrossRef] [Green Version]
- Varma, R.; Vajaranant, T.S.; Burkemper, B.; Shuang, W.; Torres, M.; Hsu, C.; Choudhury, F.; McKean-Cowdin, C. Visual impairment and blindness in adults in the United States: Demographic and geographic variations from 2015 to 2050. JAMA Ophthalmol. 2016, 134, 802–809. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huh, J.; Seo, K. An indoor location-based control system using Bluetooth beacons for IoT systems. Sensors 2017, 17, 2917. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mercado, J.; Chu, G.; Imperial, E.J.; Monje, K.G.; Pabustan, R.M.; Silverio, A. Smart cane: Instrumentation of a quad cane with audio-feedback monitoring system for partial weight-bearing support. In Proceedings of the 2014 IEEE International Symposium on Bioelectronics and Bioinformatics (ISBB), Chung Li, Taiwan, 11–14 April 2014; pp. 1–4. [Google Scholar]
- Jeong, J.P.; Yeon, S.; Kim, T.; Lee, H.; Kim, S.M.; Kim, S. SALA: Smartphone-assisted localization algorithm for positioning indoor IoT devices. Wirel. Netw. 2018, 24, 27–47. [Google Scholar] [CrossRef]
- Link, J.A.B.; Smith, P.; Viol, N.; Wehrle, K. Footpath: Accurate map-based indoor navigation using smartphones. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; pp. 1–8. [Google Scholar]
- Prasithsangaree, P.; Krishnamurthi, P.; Chrysanthis, P.K. On indoor position with wireless LANs. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Pavilhao Altantico, Lisboa, Portugal, 18 September 2002; Volume 2, pp. 720–724. [Google Scholar]
- Mautz, R.; Tilch, S. Optical Indoor Positioning Systems. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimarães, Portugal, 21–23 September 2011. [Google Scholar]
- Kohoutek, T.K.; Mautz, R.; Donaubauer, A. Real-time Indoor Positioning Using Range Imaging Sensors. SPIE Photonics Eur. Real-Time Image Video Process. 2010, 7724. [Google Scholar] [CrossRef]
- Mulloni, A.; Wgner, D.; Schmalstieg, D.; Barakonyi, I. Indoor Positioning and Navigation with Camera Phones. IEEE Pervasive Comput. 2009, 8, 22–31. [Google Scholar] [CrossRef]
- Peterson, B.B.; Kmiecik, C.; Hartnett, R.; Thompson, P.M.; Mendoza, J.; Nguyen, H. Spread spectrum indoor geolocation. J. Inst. Navigat. 1998, 45, 97–102. [Google Scholar] [CrossRef]
- Li, X.; Pahlavan, K.; Latva-aho, M.; Ylianttila, M. Comparison of indoor geolocation methods in DSSS and OFDM wireless LAN. In Proceedings of the Vehicular Technology Conference Fall 2000. IEEE VTS Fall VTC2000. 52nd Vehicular Technology Conference, Boston, MA, USA, 24–28 September 2000; Volume 6, pp. 3015–3020. [Google Scholar]
- Correal, N.S.; Kyperountas, S.; Shi, Q.; Welborn, M. An ultrawideband relative location system. In Proceedings of the IEEE Conference on Ultra Wideband Systems and Technologies, Reston, VA, USA, 16–19 November 2003; pp. 394–397. [Google Scholar]
- Pereiraab, A.; Nunesa, N.; Vieiraa, D.; Costaa, N.; Fernandesc, H.; Barrosoc, J. Blind Guide: An ultrasound sensor-based body area network for guiding blind people. Procedia Comput. Sci. 2015, 67, 403–408. [Google Scholar] [CrossRef] [Green Version]
- Domingo, M.C. An Overview of the Internet of Things for people with disabilities. J. Netw. Comput. Appl. 2012, 55, 584–596. [Google Scholar] [CrossRef]
- Fang, B. Simple solution for hyperbolic and related position fixes. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 748–753. [Google Scholar] [CrossRef]
- Kanaan, M.; Pahlavan, K. A comparison of wireless geolocation algorithms in the indoor environment. In Proceedings of the 2004 IEEE Wireless Communications and Networking Conference (IEEE Cat. No.04TH8733), Atlanta, GA, USA, 21–24 March 2004; Volume 1, pp. 177–182. [Google Scholar]
- Zhou, J.; Chu, K.M.-K.; Ng, J.K.-Y. Providing location services within a radio cellular network using ellipse propagation model. In Proceedings of the 19th International Conference on Advanced Information Networking and Applications (AINA’05) Volume 1 (AINA papers), Taipei, Taiwan, 28–30 March 2005; pp. 559–564. [Google Scholar]
- Teuber, A.; Eissfeller, B. Atwo-stage fuzzy logic approach forwireless LAN indoor positioning. In Proceedings of the 2006 IEEE/ION Position, Location, And Navigation Symposium, Coronado, CA, USA, 25–27 April 2006; Volume 4, pp. 730–738. [Google Scholar]
- Pahlavan, K.; Li, X.; Makela, J. Indoor geolocation science and technology. IEEE Commun. Mag. 2002, 40, 112–118. [Google Scholar] [CrossRef]
- van Veen, B.D.; Buckley, K.M. Beamforming: A versatile approach to spatial filtering. IEEE ASSP Mag. 1988, 5, 4–24. [Google Scholar] [CrossRef]
- Ottersten, B.; Viberg, M.; Stoica, P.; Nehorai, A. Exact and large sample ML techniques for parameter estimation and detection in array processing. In Radar Array Processing; Haykin, S.S., Litva, J., Shepherd, T.J., Eds.; Springer: New York, NY, USA, 1993; pp. 99–151. [Google Scholar]
- Kontkanen, P.; Myllymaki, P.; Roos, T.; Tirri, H.; Valtonen, K.; Wettig, H. Topics in probabilistic location estimation inwireless networks. In Proceedings of the 2004 IEEE 15th International Symposium on Personal, Indoor and Mobile Radio Communications, Barcelona, Spain, 5–8 September 2004. [Google Scholar]
- Köhler, M.; Patel, S.; Summet, J.; Stuntebeck, E.; Abowed, G. TrackSense: Infrastructure Free Precise Indoor Positioning Using Projected Patterns. Pervasive Comput. LNCS 2007, 4480, 334–350. [Google Scholar]
- Cristianini, N.; Shawe-Taylor, J. An Introduction to Support Vector Machines; Cambridge University Press: Cambridge, UK, 2000; Available online: http://www.support-vector.net (accessed on 10 March 2020).
- Brunato, M.; Battiti, R. Statistical learning theory for location fingerprinting in wireless LANs. Comput. Netw. 2005, 47, 825–845. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.L.; Fu, L.C.; Lian, F.L. WLAN location determination in ehome via support vector classification. In Proceedings of the IEEE International Conference on Networking, Sensing and Control, Taipei, Taiwan, 21–23 March 2004; Volume 2, pp. 1026–1031. [Google Scholar]
- Evolution Robotics. 2010. Available online: http://www.evolution.com (accessed on 12 March 2020).
- Lee, H.S.; Lee, S.H.; Lee, J.G.; Lee, J.K. Design of Beacon-Based Positioning System Using RF and Sound Wave in Smartphone. In Advances in Computer Science and Ubiquitous Computing. CUTE 2017, CSA 2017; Park, J., Loia, V., Yi, G., Sung, Y., Eds.; Lecture Notes in Electrical Engineering 2018; Springer: Singapore, 2017; Volume 474. [Google Scholar]
- Bu, Y.; Seo, K.; Huh, J.-H. A study of enhancement of ranging performance of beacons through the improvement of the smart phone’s gyroscope: Focusing on the Bluetooth low energy. In Proceedings of the 11th International Conference on Ubiquitous Information Management and Communication (ACM IMCOM), Beppu, Japan, 5–7 January 2017; p. 90. [Google Scholar]
- Muffert, M.; Siegemund, J.; Förstner, W. The Estimation of Spatial Positions by Using an Omnidirectional Camera System. In Proceedings of the 2nd International Conference on Machine Control & Guidance, Bonn, Germany, 9–11 March 2010; pp. 95–104. [Google Scholar]
- Wahab, M.H.A.; Talib, A.A.; Kadir, H.A.; Johari, A.; Noraziah, A.; Sidek, R.M.; Mutalib, A.A. Smart cane: Assistive cane for visually-impaired people. arXiv 2011, arXiv:1110.5156. [Google Scholar]
- Naiwrita, D.; Paul, A.; Ghosh, P.; Mukherjee, C.; De, R.; Dey, S. Ultrasonic Sensor Based Smart Blind Stick. In Proceedings of the 2018 International Conference on Current Trends towards Converging Technologies (ICCTCT), Coimbatore, India, 1–3 March 2018; pp. 1–4. [Google Scholar]
- Shah, H.R.; Uchil, D.; Rane, S.S.; Shete, P. Smart stick for blind using arduino, ultrasonic sensor and android. Int. J. Eng. Sci. 2017, 7, 10929–10933. [Google Scholar]
- Wade, J.; Beccani, M.; Myszka, A.; Bekele, E.; Valdastri, P.; Flemming, P.; Riesthal, M.; Withrow, T.; Sarkar, N. Design and implementation of an instrumented cane for gait recognition. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5904–5909. [Google Scholar]
- Lipson, B.L.; Thomas, D.; Dharani, P.I. RFID Navigation System for the Visually Impaired. April 2012. Available online: https://digitalcommons.wpi.edu/mqp-all/4038 (accessed on 30 April 2020).
- Du, H.; Zhang, C.; Ye, Q.; Xu, W.; Kibenge, P.L.; Yao, K. A hybrid outdoor localization scheme with high-position accuracy and low-power consumption. EURASIP J. Wirel. Commun. Netw. 2018. [Google Scholar] [CrossRef] [Green Version]
- Gunther, A.; Hoene, C. Measuring round trip times to determine the distance between WLAN nodes. In Proceedings of the Networking 2005, Waterloo, ON, Canada, 2–6 May 2005; pp. 768–779. [Google Scholar]
- HC-SR04 Ultrasonic Range Finder, robotshop.com. Available online: https://www.robotshop.com/en/hc-sr04-ultrasonic-range-finder-osepp.html (accessed on 30 April 2020).
- ADXL337 and ADXL377 Accelerometer Hookup Guide—learn.sparkfun.com. Learn.sparkfun.com. 2019. Available online: https://learn.sparkfun.com/tutorials/adxl337-and-adxl377-accelerometer-hookup-guide/all (accessed on 30 April 2020).
- Charmed Labs Pixy 2 CMUcam5 Image Sensor. robotshop.com. Available online: https://www.robotshop.com/en/charmed-labs-pixy-2-cmucam5-image-sensor.html (accessed on 30 April 2020).
- A. Industries. Emic 2 Text-to-Speech Module. Adafruit.com. 2018. Available online: https://www.adafruit.com/product/924 (accessed on 30 April 2020).
- Zhao, N. Full-featured pedometer design realized with 3-axis digital accelerometer. Analog Dialogue 2010, 44, 1–5. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Time | Number of Obstacles Stored in the Cloud |
|---|---|---|
| 1 | 154 s | 2 |
| 2 | 112 s | 5 |
| 3 | 105 s | 5 |
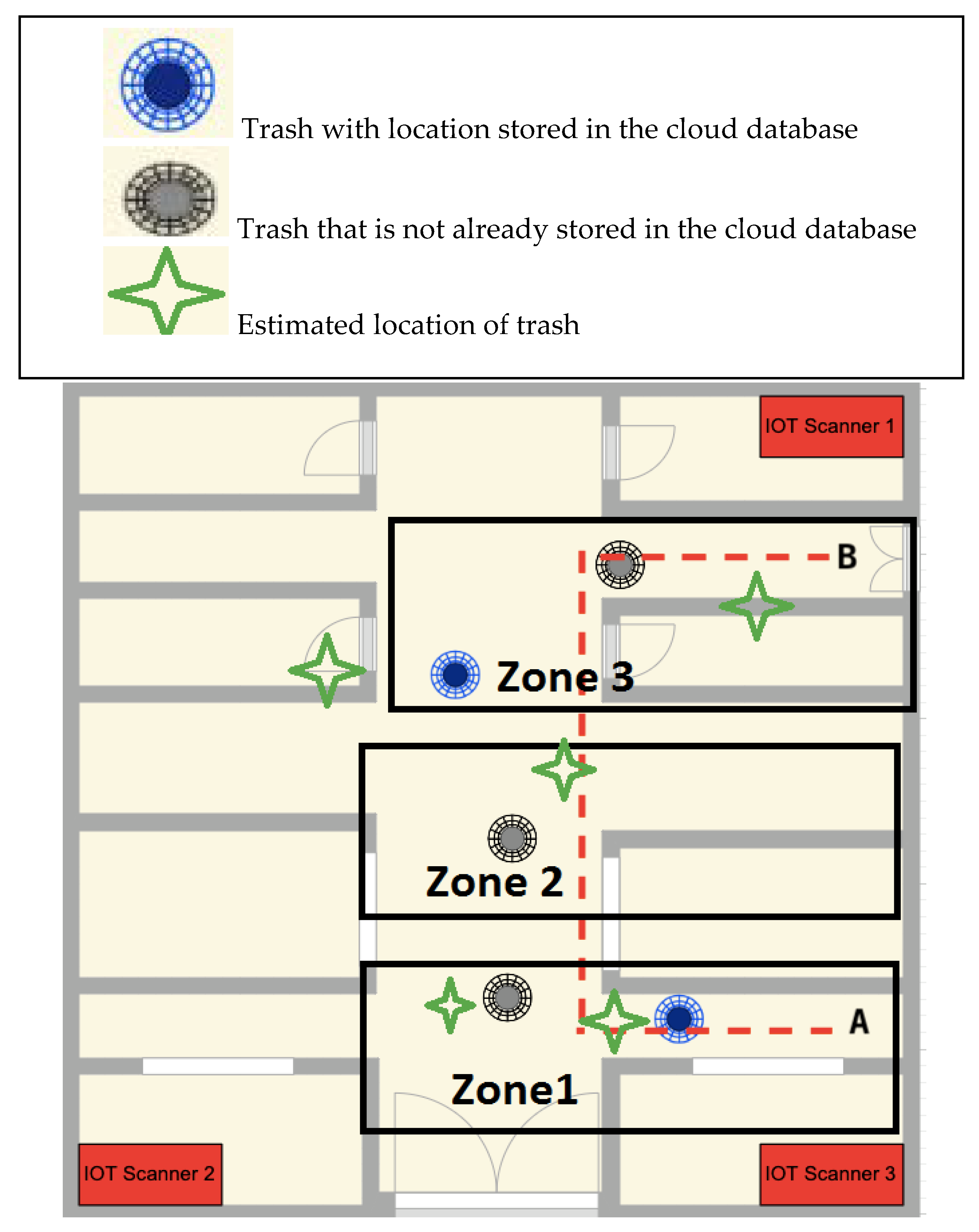
| Zone | Precision of Estimated Location of Trash | Precision |
|---|---|---|
| 1 | Between 50 cm to 55 cm | Between 50 cm to 55 cm |
| 2 | Between 60 cm to 75 cm | Between 60 cm and 70 cm |
| 3 | Between 80 cm to 100 cm | Between 80 cm and 90 cm |
| Parameters | Smart Navigation Mode | Eco Mode | Offline Mode |
|---|---|---|---|
| Battery | 11.8 h | 12.45 h | 15.2 h |
| Maximum object detection range | 500 cm | 400 cm | 400 cm |
| Time Delay | 1 s | 1.2 s | Not applicable |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Messaoudi, M.D.; Menelas, B.-A.J.; Mcheick, H. Autonomous Smart White Cane Navigation System for Indoor Usage. Technologies 2020, 8, 37. https://doi.org/10.3390/technologies8030037
Messaoudi MD, Menelas B-AJ, Mcheick H. Autonomous Smart White Cane Navigation System for Indoor Usage. Technologies. 2020; 8(3):37. https://doi.org/10.3390/technologies8030037
Chicago/Turabian StyleMessaoudi, Mohamed Dhiaeddine, Bob-Antoine J. Menelas, and Hamid Mcheick. 2020. "Autonomous Smart White Cane Navigation System for Indoor Usage" Technologies 8, no. 3: 37. https://doi.org/10.3390/technologies8030037
APA StyleMessaoudi, M. D., Menelas, B. -A. J., & Mcheick, H. (2020). Autonomous Smart White Cane Navigation System for Indoor Usage. Technologies, 8(3), 37. https://doi.org/10.3390/technologies8030037