
Computer Animation Education Online: A Tool to Teach Control Systems Engineering throughout the COVID-19 Pandemic



Abstract
:1. Introduction
2. Computer Animation
3. Computer Animation in Teaching Control Systems at the University Level
- Mass-spring-damper system;
- Simple pendulum;
- Inverted pendulum;
- Inverted pendulum mounted on a cart;
- Double inverted pendulum mounted on a cart;
- Two inverted pendulums mounted on a cart;
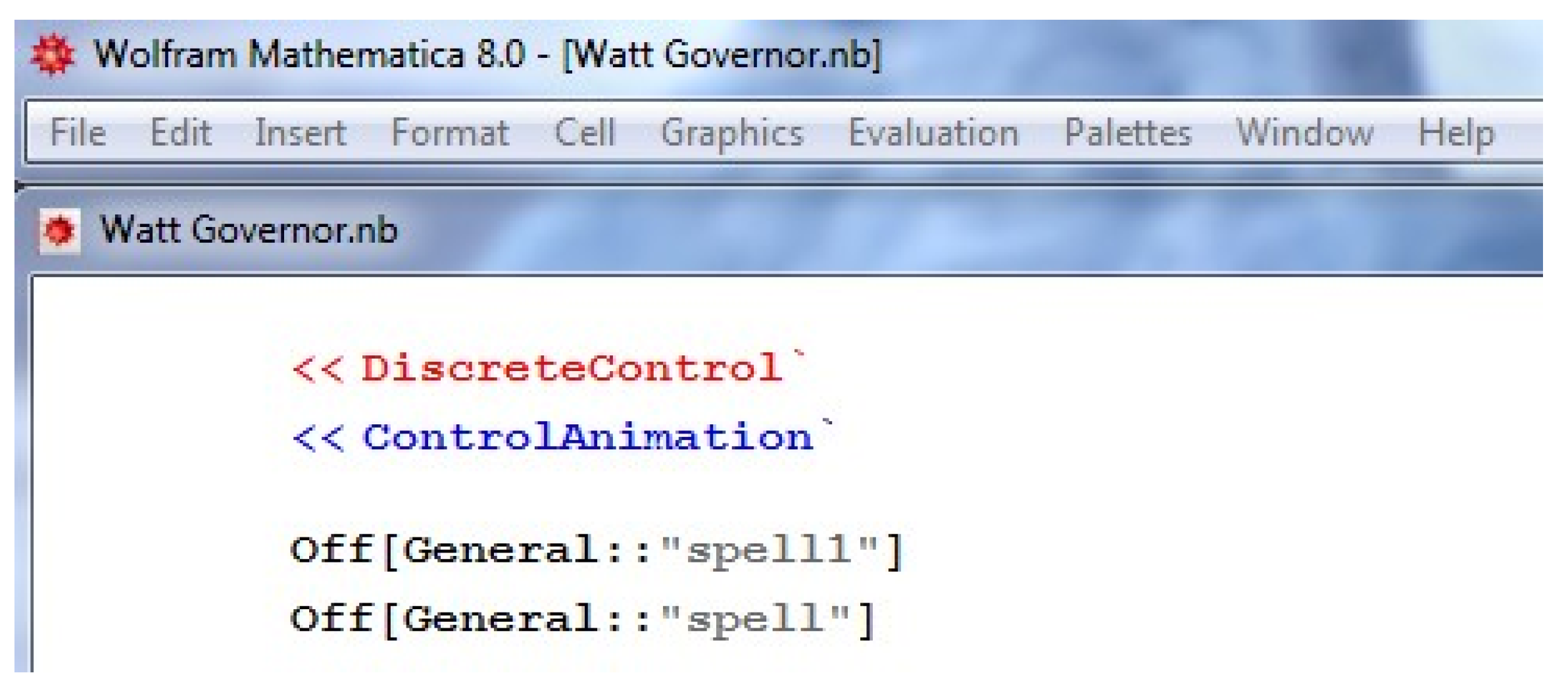
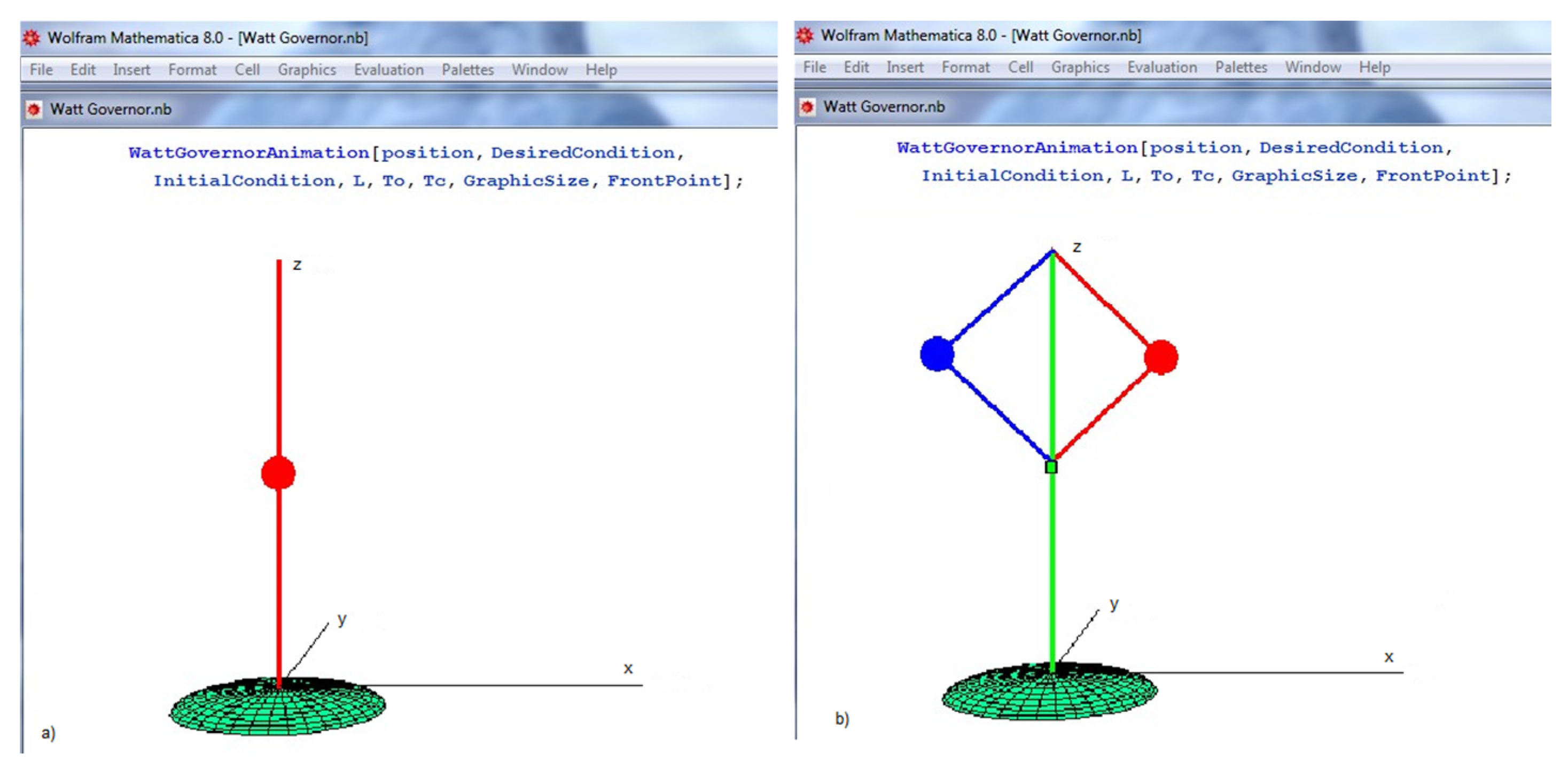
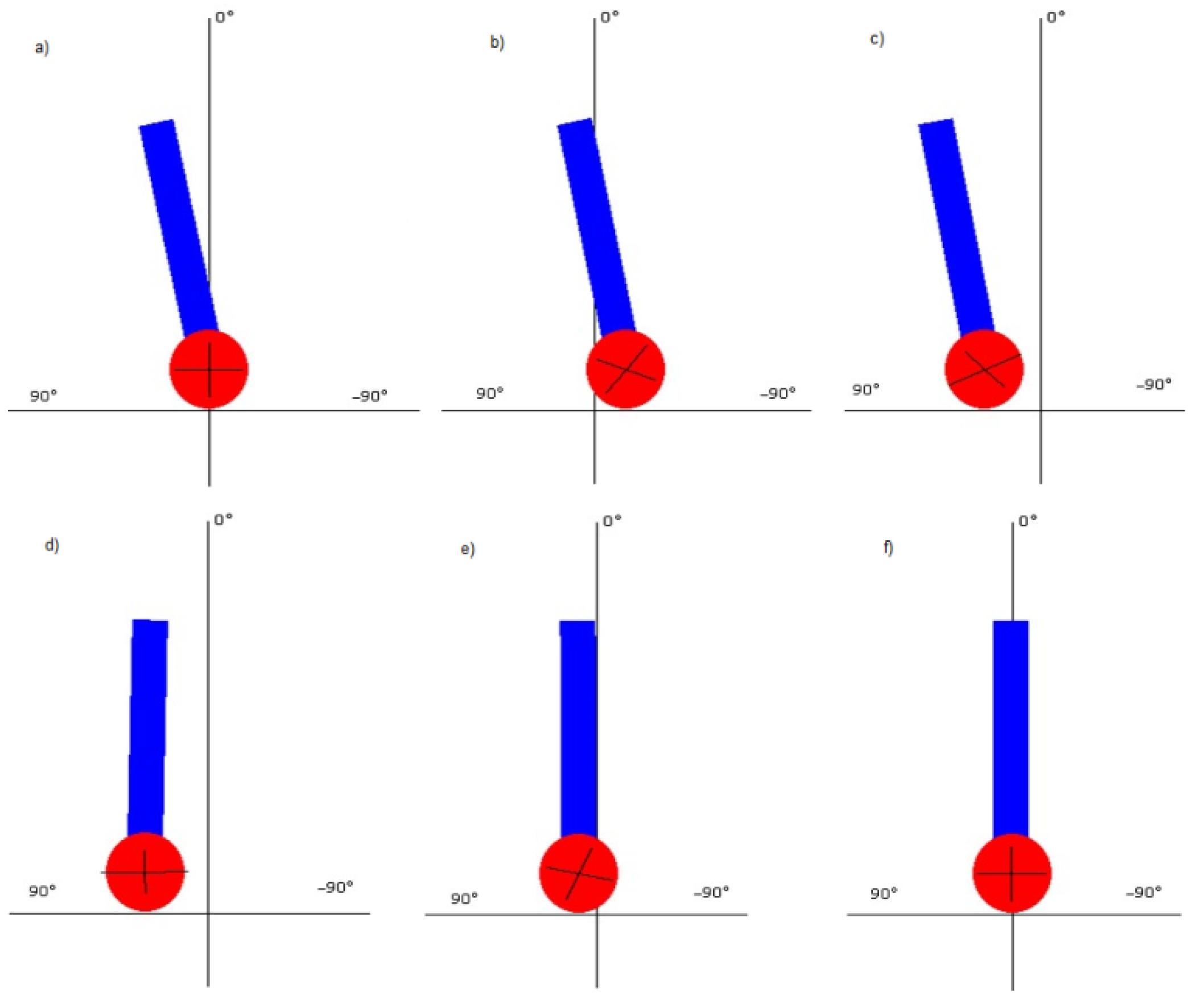
- Watt Governor (Figure 2);
- Centrifugal pendulum;
- Airplane.

4. Project-Based Learning and Online Education through Computer Animation
5. Computer Animation as an Educational Tool in Teaching and Learning of Control Systems Engineering

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Course Name | Students Use of the ControlAnimation Library in Their Activities (%) | Average Grades (Range 1–20 pts) | Students Approved Course (%) |
|---|---|---|---|---|
| 2011 | Digital Control | 30 | 12.3 ± 1.7 | 85 |
| 2011 | Robust Control | 30 | 13.7 ± 1.9 | 95 |
| 2012 | Digital Control | 40 | 13.1 ± 1.7 | 90 |
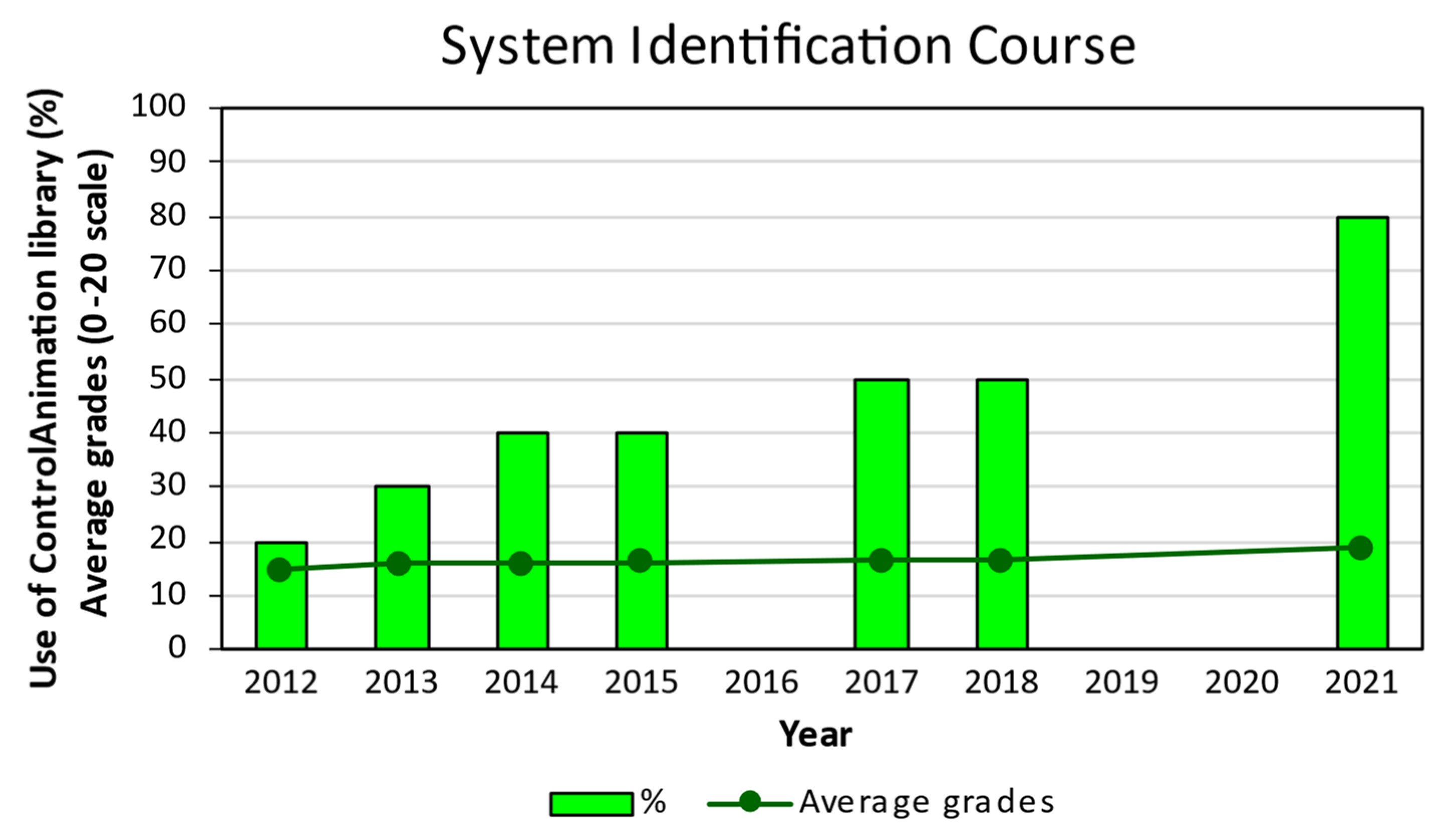
| 2012 | System Identification | 20 | 14.6 ± 2.1 | 98 |
| 2013 | Digital Control | 50 | 14.7 ± 2.0 | 100 |
| 2013 | System Identification | 30 | 15.8 ± 1.9 | 95 |
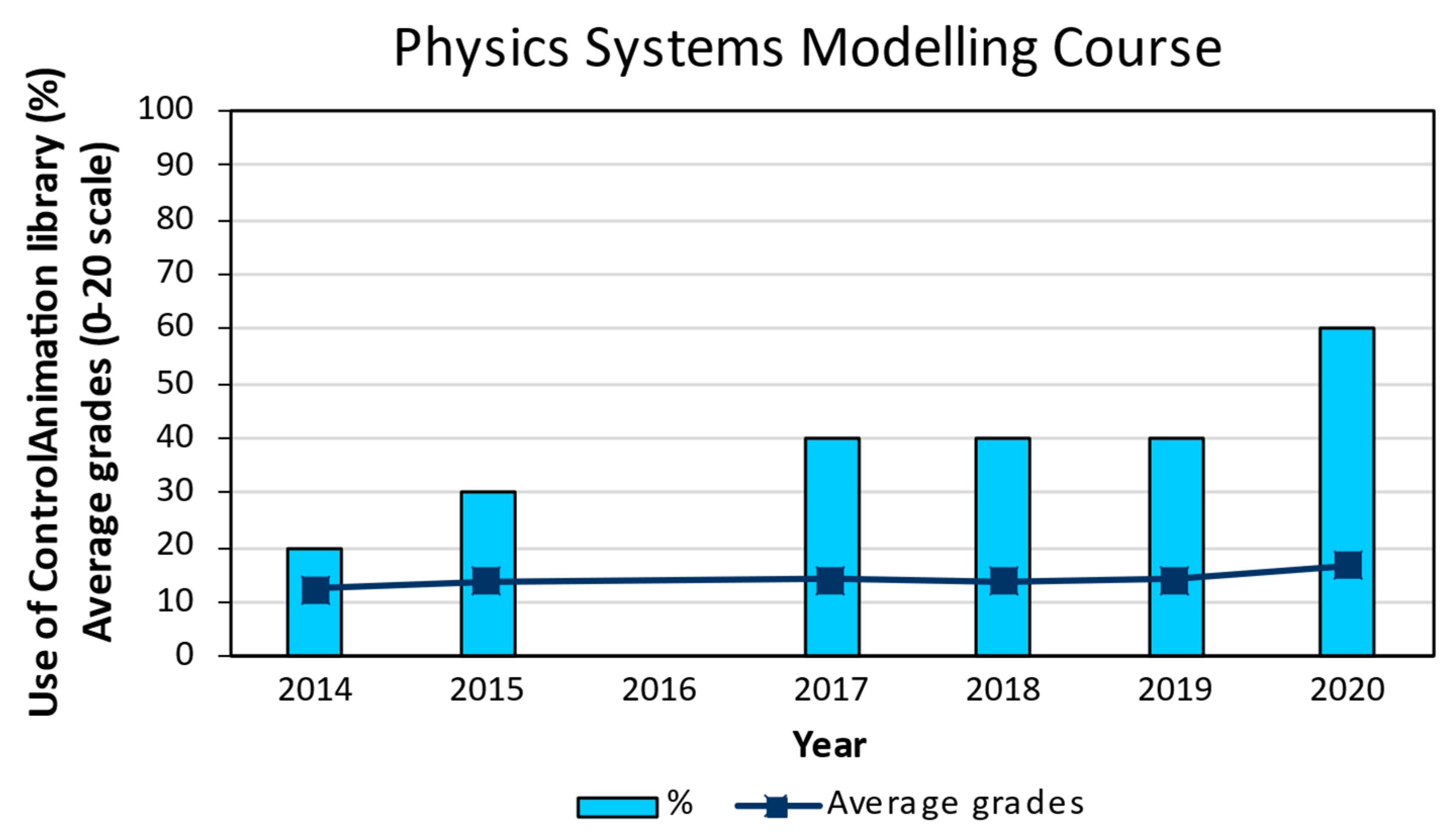
| 2014 | Physics Systems Modelling | 20 | 12.4 ± 1.5 | 89 |
| 2014 | System Identification | 40 | 15.7 ± 2.0 | 100 |
| 2015 | Physics Systems Modelling | 30 | 13.8 ± 1.9 | 95 |
| 2015 | System Identification | 40 | 16.2 ± 1.8 | 100 |
| 2017 | Physics Systems Modelling | 40 | 14.1 ± 1.8 | 98 |
| 2017 | System Identification | 50 | 16.4 ± 2.0 | 100 |
| 2018 | Physics Systems Modelling | 40 | 13.9 ± 1.9 | 97 |
| 2018 | System Identification | 50 | 16.3 ± 1.5 | 00 |
| 2019 | Physics Systems Modelling | 40 | 14.2 ± 1.6 | 98 |
| 2020 | Physics Systems Modelling | 60 | 16.6 ± 1.8 | 97 |
| 2021 | System Identification | 80 | 18.7 ± 1.9 | 100 |
| 2021 | Automatic Control History | 80 | 17.8 ± 2.1 | 97 |
6. Challenges and Opportunities of Implementing Computer Animation as an Educational Tool in Control Systems Engineering Undergraduate Programs
7. Conclusions
- Can the educational future be in the metaverse?
- Will it be possible to teach virtually on the metaverse?
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mourtzis, D. Simulation in the design and operation of manufacturing systems: State of the art and new trends. Int. J. Prod. Res. 2020, 58, 1927–1949. [Google Scholar] [CrossRef]
- Oztemel, E.; Gursev, S. Literature review of Industry 4.0 and related technologies. J. Intell. Manuf. 2020, 31, 127–182. [Google Scholar] [CrossRef]
- Tao, F.; Qi, Q.; Liu, A.; Kusiak, A. Data-driven smart manufacturing. J. Manuf. Syst. 2018, 48, 157–169. [Google Scholar] [CrossRef]
- Zhu, W.; Fan, X.; Zhang, Y. Applications and research trends of digital human models in the manufacturing industry. Virtual Real. Intell. Hardw. 2019, 1, 558–579. [Google Scholar] [CrossRef]
- Makhataeva, Z.; Varol, H.A. Augmented Reality for Robotics: A Review. Robotics 2020, 9, 21. [Google Scholar] [CrossRef] [Green Version]
- Piazza, C.; Grioli, G.; Catalano, M.G.; Bicchi, A. A Century of Robotic Hands. Annu. Rev. Control. Robot. Auton. Syst. 2019, 2, 1–32. [Google Scholar] [CrossRef]
- Pla-Castells, M.; García-Fernández, I.; Gimeno, J.; Ferrando, I. Computer Animation to teach interpolation. Model. Sci. Educ. Learn. 2019, 12, 31. [Google Scholar] [CrossRef] [Green Version]
- Marquez, R.; Tolosa, L.; Celis, M.T. Understanding COVID-19 effect on the U.S. supply chain of strategic products: Important factors, current situation, and future perspective. Cienc. Ing. 2021, 42, 53–62. [Google Scholar]
- Grodotzki, J.; Upadhya, S.; Tekkaya, A.E. Engineering education amid a global pandemic. Adv. Ind. Manuf. Eng. 2021, 3, 100058. [Google Scholar] [CrossRef]
- Maqsood, A.; Abbas, J.; Rehman, G.; Mubeen, R. The paradigm shift for educational system continuance in the advent of COVID-19 pandemic: Mental health challenges and reflections. Curr. Res. Behav. Sci. 2021, 2, 100011. [Google Scholar] [CrossRef]
- Vijayan, R. Teaching and learning during the covid-19 pandemic: A topic modeling study. Educ. Sci. 2021, 11, 347. [Google Scholar] [CrossRef]
- Loukomies, A.; Juuti, K. Primary students’ experiences of remote learning during covid-19 school closures: A case study of Finland. Educ. Sci. 2021, 11, 560. [Google Scholar] [CrossRef]
- Asgari, S.; Trajkovic, J.; Rahmani, M.; Zhang, W.; Lo, R.C.; Sciortino, A. An observational study of engineering online education during the COVID-19 pandemic. PLoS ONE 2021, 16, e0250041. [Google Scholar] [CrossRef]
- Moreland, A.; Herlihy, C.; Tynan, M.A.; Sunshine, G.; McCord, R.F.; Hilton, C.; Poovey, J.; Werner, A.K.; Jones, C.D.; Fulmer, E.B.; et al. Timing of State and Territorial COVID-19 Stay-at-Home Orders and Changes in Population Movement—United States, 1 March–31 May 2020. Morb. Mortal. Wkly. Rep. 2020, 69, 1198. [Google Scholar] [CrossRef]
- Fabris, C.P.; Rathner, J.A.; Fong, A.Y.; Sevigny, C.P. Virtual reality in higher education. Int. J. Innov. Sci. Math. Educ. 2019, 27, 69–80. [Google Scholar] [CrossRef]
- Patete, A.; Marquez, P.; Rodriguez-Millan, J. Modeling, simulation and animation of an arc reflex system. Cienc. Ing. 2015, 36, 61–72. [Google Scholar]
- Ribeiro, T.; Paiva, A. The Practice of Animation in Robotics. In Modelling Human Motion: From Human Perception to Robot Design; Noceti, N., Sciutti, A., Rea, F., Eds.; Springer: Cham, Switzerland, 2020; pp. 237–269. ISBN 978-3-030-46732-6. [Google Scholar]
- UNESCO. Moving Forward the 2030 Agenda for Sustainable Development. Available online: https://unesdoc.unesco.org/ark:/48223/pf0000247785 (accessed on 20 February 2022).
- Abdulwahed, M. Technology Innovation and Engineering’ Education and Entrepreneurship (TIEE) in Engineering Schools: Novel Model for Elevating National Knowledge Based Economy and Socio-Economic Sustainable Development. Sustainability 2017, 9, 171. [Google Scholar] [CrossRef] [Green Version]
- Tan, W.K.; Umemoto, M. International Industrial Internship: A Case Study from a Japanese Engineering University Perspective. Educ. Sci. 2021, 11, 156. [Google Scholar] [CrossRef]
- De Graaff, E.; Ravesteijn, W. Training complete engineers: Global enterprise and engineering education. Eur. J. Eng. Educ. 2001, 26, 419–427. [Google Scholar] [CrossRef]
- Marquez, R.; Tolosa, L.; Gómez, R.; Izaguirre, C.; Rennola, L.; Bullón, J.; Sandia, B. Reproducing an innovation environment in the classroom. An strategy to promote creativity in Chemical Engineering education. Educ. Quim. 2016, 27, 249–256. [Google Scholar]
- Tolosa, L.; Marquez, R.; Rennola, L.; Sandia, B.; Bullon, J. An overview of today’s project-based learning and how it has been implemented in the Chemical Engineering School at Universidad de Los Andes. Educ. Quím. 2018, 29, 36–48. [Google Scholar] [CrossRef]
- Hoffman, G.; Kubat, R.; Breazeal, C. A hybrid control system for puppeteering a live robotic stage actor. In Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication, Munich, Germany, 1–3 August 2008; pp. 354–359. [Google Scholar]
- LaViers, A.; Teague, L.; Egerstedt, M. Style-Based Robotic Motion in Contemporary Dance Performance. In Controls and Art; Inquiries at the Intersection of the Subjective and the Objective; LaViers, A., Egerstedt, M., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 205–229. ISBN 978-3-319-03904-6. [Google Scholar]
- Patete, A.; Rodríguez Millán, J. Los mímicos computacionales: Una herramienta docente para la enseñanza de la ingeniería de control. Acción Pedagóg. 2011, 20, 92–103. [Google Scholar]
- Rodríguez-Millán, J.; González, C.; Patete, A. Improved Non-Standard Discretization Methods for Nonlinear Dynamical Control Systems; Moreno Díaz, R., Pichler, F., Quesada Arencibia, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 608–613. [Google Scholar]
- Shimada, S.; Golyanik, V.; Xu, W.; Theobalt, C. PhysCap: Physically Plausible Monocular 3D Motion Capture in Real Time. ACM Trans. Graph. 2020, 39, 1–16. [Google Scholar] [CrossRef]
- Won, J.; Gopinath, D.; Hodgins, J. Control strategies for physically simulated characters performing two-player competitive sports. ACM Trans. Graph. 2021, 40, 1–11. [Google Scholar] [CrossRef]
- Patete, A. Desarrollo de un Mímico de un Sistema de Control en Mathematica; Universidad de Los Andes: Merida, Venezuela, 2002. [Google Scholar]
- Isermann, R.; Münchhof, M. Identification of Dynamic Systems: An Introduction with Applications; Isermann, R., Münchhof, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; ISBN 978-3-540-78879-9. [Google Scholar]
- Kerlow, I.V. The Art of 3D Computer Animation and Effects; John Wiley & Sons: Hoboken, NJ, USA, 2009; ISBN 0470084901. [Google Scholar]
- Garza Mireles, D. Animación digital y realidad virtual. Cienc. UANL 2014, 17, 58–62. [Google Scholar]
- Pausch, R.; Crea, T.; Conway, M. A Literature Survey for Virtual Environments: Military Flight Simulator Visual Systems and Simulator Sickness. Presence Teleoperators Virtual Environ. 1992, 1, 344–363. [Google Scholar] [CrossRef]
- Fussell, S.; Thomas, R. Interactive Modules for Flight Training: A Review. J. Aviat. Educ. Res. 2021, 30, 3. [Google Scholar] [CrossRef]
- Güler, K. Utilizing visitor simulations in exhibition design process: Evaluating designers’ perspectives. J. Simul. 2021, 2021, 1–14. [Google Scholar] [CrossRef]
- Klačková, I.; Kuric, I.; Zajačko, I.; Tlach, V.; Wiecek, D. Virtual reality in Industry. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1199, 12005. [Google Scholar] [CrossRef]
- Paszkiewicz, A.; Salach, M.; Dymora, P.; Bolanowski, M.; Budzik, G.; Kubiak, P. Methodology of Implementing Virtual Reality in Education for Industry 4.0. Sustainability 2021, 13, 5049. [Google Scholar] [CrossRef]
- Nogueira, J.R.; Alves, R.; Marques, P.C. Computational Programming as a Tool in the Teaching of Electromagnetism in Engineering Courses: Improving the Notion of Field. Educ. Sci. 2019, 9, 64. [Google Scholar] [CrossRef] [Green Version]
- Arnold, U.; Söbke, H.; Reichelt, M. SimCity in Infrastructure Management Education. Educ. Sci. 2019, 9, 209. [Google Scholar] [CrossRef] [Green Version]
- Cheng, K.W.; Chan, C.L. Remote Hardware Controlled Experiment Virtual Laboratory for Undergraduate Teaching in Power Electronics. Educ. Sci. 2019, 9, 222. [Google Scholar] [CrossRef] [Green Version]
- Mattila, A.; Martin, R.M.; DeIuliis, E.D. Simulated Fieldwork: A Virtual Approach to Clinical Education. Educ. Sci. 2020, 10, 272. [Google Scholar] [CrossRef]
- Agbo, F.J.; Sanusi, I.T.; Oyelere, S.S.; Suhonen, J. Application of Virtual Reality in Computer Science Education: A Systemic Review Based on Bibliometric and Content Analysis Methods. Educ. Sci. 2021, 11, 142. [Google Scholar] [CrossRef]
- Dell’Aquila, E.; Vallone, F.; Zurlo, M.C.; Marocco, D. SG-ACCORD: Designing Virtual Agents for Soft Skills Training in the School Context. Educ. Sci. 2022, 12, 174. [Google Scholar] [CrossRef]
- Rivas-Echeverria, F.; Rios-Bolivar, A.; Casales-Echeverria, J. Neural network-based auto-tuning for PID controllers. Neural Netw. World 2001, 11, 277–284. [Google Scholar]
- Patete, A. Visualización de Dinámicas no Lineales Mediante Mímicos Computacionales en Mathematica; Universidad de Los Andes: Merida, Venezuela, 2005. [Google Scholar]
- Rodríguez-Millán, J.; Patete, A. 3D-Simulations in Linear and Nonlinear Dynamical Control Systems Through Computer Animated Mimics. In Proceedings of the 9th International Conference on Computer Aided Systems Theory EUROCAST 2003, Las Palmas de Gran Canarias, Spain, 24–28 February 2003; pp. 192–195. [Google Scholar]
- Rodríguez-Millán, J.; Patete, A. Visualización Tridimensional de Sistemas de Control Mediante Mímicos en Mathematica. In Proceedings of the IV Congreso de Control y Automatización CAC 2003, Merida, Venezuela, 12–14 November 2003. [Google Scholar]
- Chacon, J.; Besada-Portas, E.; Carazo-Barbero, G.; Lopez-Orozco, J.A. Enhancing EJsS with Extension Plugins. Electronics 2021, 10, 242. [Google Scholar] [CrossRef]
- Flores, M.; Payá, L.; Valiente, D.; Gallego, J.; Reinoso, O. Deployment of a Software to Simulate Control Systems in the State-Space. Electronics 2019, 8, 1205. [Google Scholar] [CrossRef] [Green Version]
- Mejías, A.; Herrera, R.S.; Márquez, M.A.; Calderón, A.J.; González, I.; Andújar, J.M. Easy Handling of Sensors and Actuators over TCP/IP Networks by Open Source Hardware/Software. Sensors 2017, 17, 94. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez-Millán, J.; Patete, A.; González, C. Picard Discretization of Nonlinear Systems: Symbolic or Numeric Implementation? Moreno Díaz, R., Pichler, F., Quesada Arencibia, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 121–129. [Google Scholar]
- Patete, A.; Velasco, M.; Rodriguez-Millan, J. Validation of the Non-Standard Discretization Methods Case of Study: The Simple Pendulum. In Proceedings of the 9th WSEAS International Conference on Computational Intelligence, Man-Machine Systems and Cybernetics, Merida, Venezuela, 14–16 December 2010; World Scientific and Engineering Academy and Society (WSEAS): Stevens Point, WI, USA, 2010; pp. 123–130. [Google Scholar]
- Patete, A.; Iñaki, A.; Sanchez, H. Control de un pendulo invertido basado en un modelo reducido. Rev. Ing. UC 2011, 18, 12–22. [Google Scholar]
- Furuta, K.; Sano, A.; Atherton, D.P. State Variable Methods in Automatic Control; John Wiley & Son Limited: Hoboken, NJ, USA, 1988; ISBN 0471918776. [Google Scholar]
- Ogata, K. System Dynamics, 4th ed.; Prentice Hall: Hoboken, NJ, USA, 2004. [Google Scholar]
- Coronado, J.M.; Moyano, A.; Romero, V.; Ruiz, R.; Rodríguez, J. Student Long-Term Perception of Project-Based Learning in Civil Engineering Education: An 18-Year Ex-Post Assessment. Sustainability 2021, 13, 1949. [Google Scholar] [CrossRef]
- Khandakar, A.; Chowdhury, M.E.; Gonzales, A.J.S.P.; Touati, F.; Emadi, N.A.; Ayari, M.A. Case Study to Analyze the Impact of Multi-Course Project-Based Learning Approach on Education for Sustainable Development. Sustainability 2020, 12, 480. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, N.M. Problem-Oriented Project Learning as a First Year Experience: A Transformative Pedagogy for Entry Level PPL. Educ. Sci. 2020, 10, 6. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, S.; Dinis-Carvalho, J.; Ferreira-Oliveira, A.T. Improving the Performance of Student Teams in Project-Based Learning with Scrum. Educ. Sci. 2021, 11, 444. [Google Scholar] [CrossRef]
- Mou, T.-Y. Students’ Evaluation of Their Experiences with Project-Based Learning in a 3D Design Class. Asia Pac. Educ. Res. 2020, 29, 159–170. [Google Scholar] [CrossRef]
- Delors, J. The treasure within: Learning to know, learning to do, learning to live together and learning to be. What is the value of that treasure 15 years after its publication? Int. Rev. Educ. 2013, 59, 319–330. [Google Scholar] [CrossRef]
- UNESCO. World Declaration on Higher Education for the Twenty-First Century: Vision and Action. Available online: https://unesdoc.unesco.org/ark:/48223/pf0000141952 (accessed on 2 February 2022).
- Fernandes, F.A.O.; Fuchter, N., Jr.; Daleffe, A.; Fritzen, D.; de Sousa, R.J.A. Integrating CAD/CAE/CAM in Engineering Curricula: A Project-Based Learning Approach. Educ. Sci. 2020, 10, 125. [Google Scholar] [CrossRef]
- Merma-Molina, G.; Gavilán-Martín, D.; Baena-Morales, S.; Urrea-Solano, M. Critical Thinking and Effective Personality in the Framework of Education for Sustainable Development. Educ. Sci. 2022, 12, 28. [Google Scholar] [CrossRef]
- Puertas-Aguilar, M.-Á.; Álvarez-Otero, J.; de Lázaro-Torres, M.-L. The Challenge of Professor Training in the 2030 Agenda Framework Using Geotechnologies. Educ. Sci. 2021, 11, 381. [Google Scholar] [CrossRef]
- UNESCO. Engineering: Issues, Challenges and Opportunities for Development. Available online: http://unesdoc.unesco.org/images/0018/001897/189753e.pdf (accessed on 5 December 2021).
- Hernandez-de-Menendez, M.; Díaz, C.A.E.; Morales-Menendez, R. Educational experiences with Generation Z. Int. J. Interact. Des. Manuf. 2020, 14, 847–859. [Google Scholar] [CrossRef]
- Wang, Y.-H. Integrating Games, e-Books and AR Techniques to Support Project-based Science Learning. Educ. Technol. Soc. 2020, 23, 53–67. [Google Scholar]
- Murillo-Zamorano, L.R.; Sánchez, J.Á.L.; Godoy-Caballero, A.L. How the flipped classroom affects knowledge, skills, and engagement in higher education: Effects on students’ satisfaction. Comput. Educ. 2019, 141, 103608. [Google Scholar] [CrossRef]
- Pokhrel, S.; Chhetri, R. A Literature Review on Impact of COVID-19 Pandemic on Teaching and Learning. High. Educ. Future 2021, 8, 133–141. [Google Scholar] [CrossRef]






| Course | Level | Objectives |
|---|---|---|
| Physics Systems Modelling Classroom hours: 4 h Simulation laboratory hours: 1 h Academic units: 4 | 5th period |
|
| Automatic Control History (Elective Course) Classroom hours: 3 h Simulation laboratory hours: 2 h Academic units: 4 | 6th period |
|
| System Identification Classroom hours: 4 h Simulation laboratory hours: 2 h Academic units: 5 | 8th period |
|
| Digital Control Classroom hours: 4 h Simulation laboratory hours: 2 h Physics control process laboratory hours: 2 h Academic units: 6 | 9th period |
|
| Robust Control (Elective Course) Classroom hours: 3 h Simulation laboratory hours: 2 h Academic units: 4 | 8th or 9th period |
|
| Course Name | Teaching Goals | Traditional Learning Strategies | Evaluation | Expected Competencies Students at the End of the Course |
|---|---|---|---|---|
| Physics Systems Modelling | Teaching basic physical laws, including some techniques for constructing formal mathematical models of physical systems. Providing the basic knowledge to represent and understand, through mathematical models, the behavior of physical systems. |
(1) The professor is responsible for preparing the content and material of all classes. Classes are shown and explained to students. (2) The professor explains to students the step-by-step solution of mathematical exercises based on the contents of the course. (3) The professor shows the different behaviors of the control systems studied through the traditional simulation (variable of interest vs. time). |
|
|
| Automatic Control History (Elective Course) | Teaching the evolution of control systems from the Greeks to the present day, where each advance is based on the mathematics of control systems theory and technology at the time. |
(1) The professor is responsible for preparing the content and material of all classes. Classes are shown and explained to students. (2) The professor shows the most relevant control systems throughout history and their main contributions to control theory supported by images. |
|
|
| System Identification | Teaching how to use the different techniques and calculation tools to obtain a physical control system mathematical model experimentally, e.g., using the input-output data of the control system. |
(1) The professor is responsible for preparing the content and material of all classes. Classes are shown and explained to students. (2) Use of traditional calculation tools, which are shown and explained by the professor. |
|
|
| Digital Control | The professor must show and teach to use the different techniques and tools of calculation for the analysis and design of linear control systems in discrete time. |
(1) The professor is responsible for preparing the content and material of all classes. Classes are shown and explained to students. (2) The professor explains to the students the step-by-step solution of mathematical problems, based on the contents of the course. (3) The professor explains the step-by-step implementation of discretization techniques in a real physical system. |
|
|
| Robust Control (Elective Course) | Teaching the different techniques and calculation tools for analyzing and designing control systems in their practical performance, operating in restrictive, uncertain and limiting conditions. This is performed in such a way that the control system can satisfy the operating criteria despite the disturbances present in the system. |
(1) The professor is responsible for preparing the content and material of all classes. Classes are shown and explained to students. (2) The professor explains the step-by-step solution of mathematical problems to the students, based on the course contents. (3) The professor shows the changes in a control system with uncertainties through traditional input-output graphs. (4) The professor shows how the design of a robust controller can act in the presence of a disturbance and continue to control the system to the desired conditions, through traditional input-output graphs. |
|
|
| Course Name | Teaching Goals | Traditional Learning Strategies | Evaluation | Expected Competencies Students at the End of the Course |
|---|---|---|---|---|
| Physics Systems Modelling | (1) Have all the knowledge competencies and teaching skills explained in Table 2 (teaching goals part) on the contents, according to the corresponding course. (2) Know how to play the tutor’s role, making individual advice when the students require it. (3) Motivate students to relate control theory and its application to the control systems studied and connect mathematics with physics. (4) Emphasize open-ended questions to promote discussion rather than focusing on one type of answer question about knowledge. (5) Guide or direct the discussions in such a way that knowledge about all the contents of the course is covered. | (1) Active-Learning: Students become protagonists and individually or collaboratively manipulate the ControlAnimation library. This is performed by changing the parameters of the system’s mathematical model to observe the dynamics through traditional simulation (variable of interest vs. time) and by following the control system’s computer animation behavior. (2) Visualizing Systems Thinking: students visualize the dynamics (behavior) of the control theory techniques in the proposed exercises, using the ControlAnimation library. | Project-based evaluation: According to the course and its content, the evaluation is performed through a specific rubric for each project.
| (1) They must acquire all the skills described in Table 2 (expected competencies students at the end of the course part), according to the corresponding course. (2) Apply the ability to analyze and synthesize information critically. (3) Acquire and apply research skills. (4) To associate the theoretical knowledge acquired, according to the course, with the real structure and behavior of physical systems. (5) Develop autonomous work and be active students in the learning processes. (6) Develop more creative skills. |
| Automatic Control History (Elective Course) | (1) Problem-Solving: students individually or collaboratively choose a control system that has been representative in the history of automatic control (for example, the Watt Governor). Then, students build a computer animation of the chosen control system using the new technologies currently available. Thus, they must understand their physical functioning, limitations, the mathematical model, parameters, and dynamics. (2) Active-Learning: students become protagonists and individually or collaboratively manipulate the ControlAnimation library or other open-source computer animation programs to develop a computer animation of the chosen control system. (3) Visualizing Systems Thinking: the built computer animation must be able to reproduce the control system dynamics according to the given model parameters. | |||
| System Identification | (1) Active-Learning: students individually or collaboratively apply identification techniques to the input-output data obtained from computer animation, using the ControlAnimation library, and build the mathematical model representing the physical system. (2) Visualizing Systems Thinking: students validate their models’ behavior with the dynamic behavior of the computer animation under study, using the ControlAnimation library. | |||
| Digital Control | (1) Active-Learning: students, individually or collaboratively, apply the sampling techniques to the control systems of the ControlAnimation library. (2) Visualizing Systems Thinking: students analyze the effects of the sampling period, T0, on the dynamics of the sampled system by observing the traditional discrete graphs (variable of interest vs. time) and the dynamic behavior of the computer animation using the ControlAnimation library. (3) Problem-Solving: students design the digital control laws and observe the dynamics of the controlled system in the same way. Supported by the ControlAnimation library, students can analyze and design control laws for control systems commonly studied in control theory. (4) Experiential Activities and Case-Study: students implement a real system that is carried out according to the availability of real physical control systems in the laboratory. | |||
| Robust Control (Elective Course) | (1) Active-Learning: students, individually or collaboratively, manipulate the existing parameter values of models in the ControlAnimation library, to recreate perturbations of the parametric type. (2) Visualizing Systems Thinking: students observe the computer animation’s dynamic behavior in the presence of these perturbations using the ControlAnimation library. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patete, A.; Marquez, R. Computer Animation Education Online: A Tool to Teach Control Systems Engineering throughout the COVID-19 Pandemic. Educ. Sci. 2022, 12, 253. https://doi.org/10.3390/educsci12040253
Patete A, Marquez R. Computer Animation Education Online: A Tool to Teach Control Systems Engineering throughout the COVID-19 Pandemic. Education Sciences. 2022; 12(4):253. https://doi.org/10.3390/educsci12040253
Chicago/Turabian StylePatete, Anna, and Ronald Marquez. 2022. "Computer Animation Education Online: A Tool to Teach Control Systems Engineering throughout the COVID-19 Pandemic" Education Sciences 12, no. 4: 253. https://doi.org/10.3390/educsci12040253
APA StylePatete, A., & Marquez, R. (2022). Computer Animation Education Online: A Tool to Teach Control Systems Engineering throughout the COVID-19 Pandemic. Education Sciences, 12(4), 253. https://doi.org/10.3390/educsci12040253